Изобретение относится к области контроля износа двигателя, в частности износа опорных подшипников, поддерживающих во вращении, по меньшей мере, один вращающийся вал двигателя.
Опорные подшипники в авиационном газотурбинном двигателе поддерживают валы роторов высокого и низкого давления газотурбинного двигателя. При этом различают классические опорные подшипники, поддерживающие вал относительно неподвижного картера газотурбинного двигателя, и опорные подшипники, поддерживающие первый вал относительно второго вала и известные под названием «межвальных подшипников».
Поломка опорных подшипников может привести к прекращению вращения вала, поддерживаемого подшипником, и, как следствие, к полной остановке двигателя, что потенциально ставит под угрозу жизнь пассажиров летательного аппарата, на котором установлен газотурбинный двигатель. Вследствие разрушения опорного подшипника его осколки могут проникнуть между различными элементами газотурбинного двигателя, который в этом случае приходится заменять полностью. Благодаря обнаружению износа подшипников, можно заменить поврежденный подшипник до его разрушения, что позволяет увеличить срок службы газотурбинного двигателя.
Известны простые методы обнаружения износа опорных подшипников, согласно которым измеряют вибрационный сигнал газотурбинного двигателя для вычисления вибрационной энергии сигнала при помощи статистического метода (метод статистических моментов, называемый методом RMS, согласно которому вычисляют квадратный корень из среднего значения квадратов и т.д.). После этого вибрационную энергию сигнала сравнивают с порогом обнаружения, определенным эмпирическим путем. Если энергия сигнала превышает порог обнаружения, обнаруживают износ опорных подшипников. Такой метод подходит только для газотурбинных двигателей, эксплуатируемых в мало зашумленной или незашумленной среде, например, для турбин, производящих электрическую энергию.
Авиационный газотурбинный двигатель используют в сильно зашумленной среде (шум горения, шум от аэродинамического потока, многочисленные гармоники режимов вращения валов высокого и низкого давления, шум, связанный с биениями и т.д.). Таким образом, в данном случае описанный выше метод применить невозможно.
Для авиационного газотурбинного двигателя в настоящее время существует база данных дефектов, объединяющая все повреждения опорных подшипников двигателя. Предпочтительно эта база содержит дефекты всех подшипников всех опор двигателя.
Например, база данных дефектов содержит частоты, характерные для дефектного внутреннего кольца и для дефектного наружного кольца подшипника качения межвальной опоры. Действительно, если на поверхности наружного кольца подшипника существует дефект, он является причиной удара каждый раз, когда катящийся элемент встречает этот дефект. Таким образом, каждый дефект можно характеризовать теоретической частотой или множеством теоретических частот, которые сгруппированы в виде указателей дефектов, которые, в свою очередь, объединены в базе данных дефектов.
Частота, связанная с повреждением подшипника, пропорциональна скорости вращения вала или валов, поддерживаемого(ых) опорой, при этом частота распространяется через вибрации на компоненты газотурбинного двигателя. Метод обнаружения, адаптированный к области авиации, состоит в поиске вибрационных уровней компонентов газотурбинного двигателя на высокооборотном режиме его работы. Для этого в течение полного цикла полета способ предусматривает считывание вибрационного сигнала, поступающего от датчиков вибрации, которые могут обнаруживать вибрации, исходящие от компонентов газотурбинного двигателя. При этом обнаружение повреждения опорного подшипника осуществляют на основании идентификации вибрационных уровней, которые превышают порог, заранее определенный для нормального подшипника, и для которых идентифицируют один и тот же фактор. Можно, например, сослаться на европейскую патентную заявку ЕР 1111364, в которой описан вариант осуществления такого способа.
Однако испытания, проведенные на поврежденных опорных подшипниках, показали, что такой метод не обеспечивает систематического обнаружения повреждения. Действительно, измерения датчиков вибрации искажаются на высокооборотном рабочем режиме газотурбинного двигателя естественной вибрационной средой, что значительно затрудняет распознавание вибрационных уровней, характерных для повреждения.
Кроме того, из патентной заявки FR 2913769 А1, поданной на имя SNECMA, известен способ обнаружения, в котором вибрационный сигнал измеряют во время возобновляемой активности на режиме малых оборотов двигателя. Этот способ позволяет обнаруживать дефект только для одного подшипника. Кроме того, все известные методы ограничиваются обнаружением дефектов только для одного типа опорного подшипника на определенном устоявшемся режиме (высокооборотный или малооборотный режим). Однако некоторые из дефектов появляются только на высокооборотном или малооборотном режиме.
Задачей изобретения является разработка универсального способа обнаружения дефектов для всех опорных подшипников, в котором обнаружение можно было бы производить быстро, чтобы осуществлять диагностику в реальном времени. Кроме того, заявитель поставил перед собой задачу повышения точности обнаружения, чтобы надежно и воспроизводимо определять, является ли поврежденным, по меньшей мере, один опорный подшипник.
В этой связи объектом изобретения является способ обнаружения повреждения, по меньшей мере, одного опорного подшипника, поддерживающего во вращении, по меньшей мере, один вращающийся вал двигателя, отличающийся тем, что содержит этапы, на которых:
а) определяют период измерения, во время которого режим вала меняется между малооборотным режимом и высокооборотным режимом;
b) на всем периоде измерения Р считывают текущий вибрационный сигнал механической вибрации компонентов двигателя;
c) в течение периода измерения дискретизируют текущий вибрационный сигнал;
d) дискретный вибрационный сигнал синхронизируют относительно изменений режима двигателя за период измерения;
e) дискретный и синхронизированный вибрационный сигнал преобразуют в частотный сигнал для получения частотных спектральных полос, упорядоченных по режиму вращения двигателя;
f) вычисляют среднее значение амплитуд спектральных полос, чтобы получить текущую вибрационную сигнатуру двигателя;
g) вычисляют степень отклонения между текущей вибрационной сигнатурой двигателя и нормальной контрольной вибрационной сигнатурой; и
h) степень отклонения сравнивают с указателями дефектов заранее сформированной базы данных, объединяющей теоретические повреждения опорных подшипников двигателя, для определения потенциальных повреждений опорного подшипника.
Изобретение представлено в данном случае для периода измерения, во время которого режим вала изменяется между малооборотным режимом и высокооборотным режимом, однако само собой разумеется, что изобретение можно также применять между нижним режимом и верхним режимом, главное, чтобы режим двигателя мог меняться между двумя определенными значениями режима. Предпочтительно верхний режим является высокооборотным режимом, и нижний режим является малооборотным режимом.
Благодаря изобретению, можно измерять большое число повреждений в широком диапазоне режима вращения вала, при этом некоторые из повреждений появляются только на определенных режимах. Иначе говоря, заявленный способ позволяет обнаруживать любой тип повреждений, причем для всех опорных подшипников двигателя. Точное обнаружение становится возможным за счет комбинации измерения при переменном режиме, синхронизации вибрационного сигнала и сравнения с нормальной контрольной вибрационной сигнатурой.
Предпочтительно, чтобы нормальная контрольная вибрационная сигнатура являлась нормальной контрольной вибрационной сигнатурой двигателя.
Таким образом, измеряемая степень отклонения является характерной для помех, связанных с повреждениями подшипников, в силу того, что нормальная вибрационная сигнатура является строго релевантной. Благодаря сравнению со степенью отклонения, зафиксированной порогами, нет необходимости учитывать разбросы порогов в зависимости от двигателей, поскольку основа для сравнения, то есть нормальная контрольная сигнатура, предусмотрена для двигателя, на котором производят обнаружение повреждений. Обнаружение осуществляют для конкретного двигателя, что обеспечивает точность обнаружения.
Нормальную вибрационную сигнатуру двигателя получают посредством вычисления среднего значения текущих вибрационных сигнатур двигателя, измеренных за определенный период эксплуатации двигателя, предпочтительно в начале эксплуатации упомянутого двигателя.
Действительно, наиболее вероятно, что наилучшее (наиболее нормальное) поведение двигателя отмечают во время первых полетов с данным двигателем, и эти полеты могут служить точкой отсчета.
Предпочтительно, чтобы нормальную вибрационную сигнатуру двигателя предварительно подтверждали путем сравнения с родовой эталонной сигнатурой, определенной для семейства, к которому принадлежит упомянутый двигатель.
Это предварительное подтверждение позволяет избежать использования неверной сигнатуры в качестве контрольной при вычислении степени отклонения.
Предпочтительно, чтобы родовую эталонную сигнатуру получали на основании нормальных контрольных сигнатур двигателей одного семейства. Это позволяет сгладить различия внутри одного семейства двигателей, поскольку большинство двигателей являются нормальными двигателями.
Предпочтительно формируют набор нормальных контрольных сигнатур для множества двигателей одного семейства, при этом
- вычисляют степень несоответствия внутри семейства для каждой нормальной контрольной сигнатуры путем измерения статистического отклонения между упомянутой нормальной контрольной сигнатурой и другими нормальными контрольными сигнатурами набора,
- из набора нормальных контрольных сигнатур исключают сигнатуры со степенью несоответствия, превышающей определенный порог несоответствия, и
- родовую эталонную сигнатуру формируют на основании оставшихся контрольных вибрационных сигнатур.
Благодаря вышеуказанным этапам, из набора контрольных сигнатур исключают «темные пятна», сохраняя только контрольные сигнатуры с высокой вероятностью нормальности.
Предпочтительно, чтобы степень родового несоответствия вычисляли для каждой нормальной контрольной сигнатуры, измеряя статистическое отклонение между упомянутой нормальной контрольной сигнатурой и временной родовой сигнатурой, полученной на основании других нормальных контрольных сигнатур набора.
Согласно предпочтительному варианту осуществления изобретения способ дополнительно содержит этап, на котором из спектрограммы удаляют шум в зависимости от конструкционных мод двигателя, при этом удаление шума производят перед вычислением среднего значения амплитуд спектральных полос.
Этот этап «удаления шума» позволяет получить релевантную текущую вибрационную сигнатуру, не содержащую помех.
Предпочтительно, чтобы дискретный вибрационный сигнал синхронизировали по отношению к изменениям режима вала за период измерения, производя повторную дискретизацию дискретного сигнала с постоянной частотой для получения дискретного сигнала с частотой, пропорциональной режиму вала.
Предпочтительно, чтобы дискретный вибрационный сигнал синхронизировали по отношению к изменениям режима вала за период измерения, вычисляя кривую углового пути вала в области порядков и проецируя текущий вибрационный сигнал на упомянутую кривую углового пути для получения синхронизированного текущего вибрационного сигнала.
Согласно отличительному признаку изобретения нормальная контрольная вибрационная сигнатура является родовой эталонной сигнатурой, определенной для семейства упомянутого двигателя. Родовую сигнатуру можно легко получить и более легко использовать за счет сравнения с контрольной сигнатурой, характерной для двигателя.
Действительно, единую родовую контрольную сигнатуру можно использовать для большого числа двигателей одного семейства, тогда как контрольную сигнатуру двигателя, то есть индивидуальную контрольную сигнатуру можно использовать только для одного двигателя. Чтобы отслеживать износ множества двигателей в течение времени, необходимо управлять базой данных, объединяющей индивидуальные сигнатуры упомянутых двигателей. Родовая контрольная сигнатура позволяет избежать этого неудобства.
Предпочтительно, чтобы родовую эталонную сигнатуру получали на основании нормальных контрольных сигнатур двигателей одного семейства. Аналогично, все указанные выше этапы получения родовой эталонной сигнатуры можно применять для сравнения текущей сигнатуры двигателя с родовой контрольной сигнатурой.
Настоящее изобретение будет более очевидно из прилагаемых чертежей, на которых:
Фиг.1 - иллюстрирует блок-схему различных этапов способа в соответствии с изобретением для тестового двигателя.
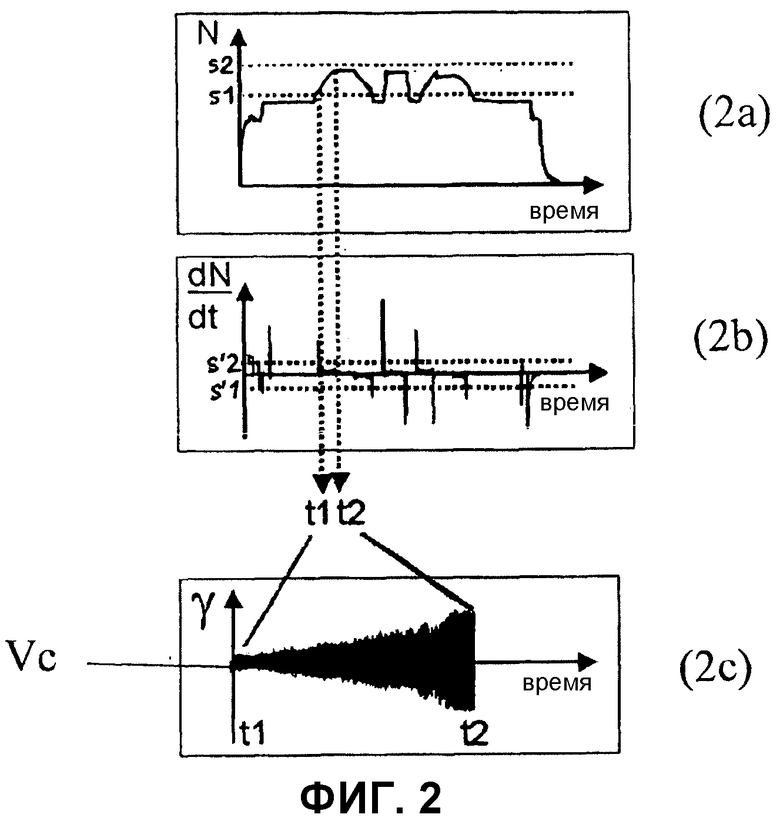
Фиг.2 - этап определения периода измерения вибрационного сигнала компонентов двигателя, где:
- кривая 2а показывает измерение режима вала в течение времени;
- кривая 2b показывает измерение ускорения вала в течение времени;
- кривая 2с показывает текущий вибрационный сигнал Vc тестового двигателя, измеренный акселерометром между моментами t1 и t2, определенными относительно кривых 2а и 2b.
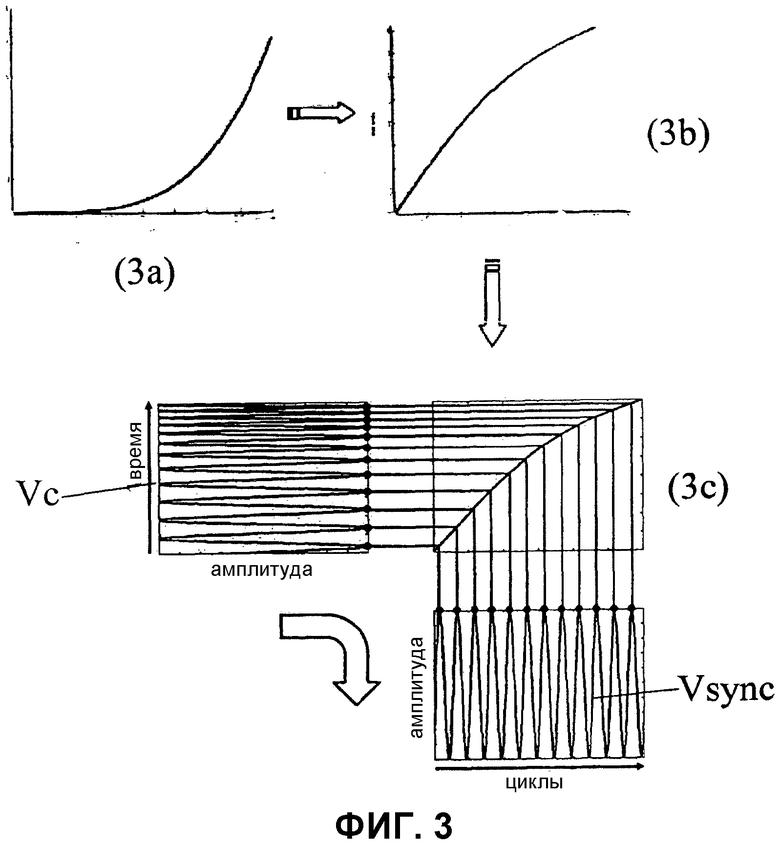
Фиг.3 - пример синхронизации вибрационного сигнала, где:
- кривая 3а показывает ускорение вала за период измерения Р;
- кривая 3b показывает время углового пути вала в зависимости от числа оборотов вала;
- кривая 3с представляет собой проекцию текущего вибрационного сигнала Vc на кривой 3b для получения синхронизированного текущего вибрационного сигнала Vsync.
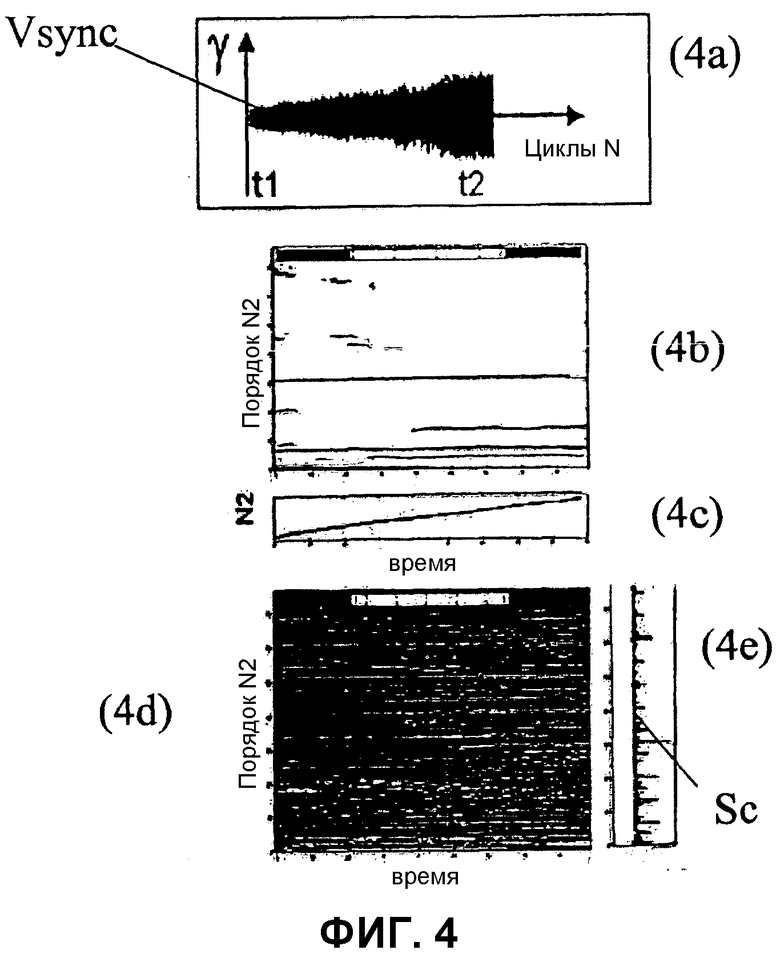
Фиг.4 - этап получения текущей сигнатуры Sc тестового двигателя, где:
- кривая 4а характеризует синхронизированный текущий вибрационный сигнал Vsync тестового двигателя;
- схема 4b представляет собой спектрограмму порядка синхронизированного текущего вибрационного сигнала Vsync тестового двигателя;
- схема 4с представляет собой ускорение режима вращения вала за период измерения Р;
- схема 4d представляет собой спектрограмму порядка схемы 4b после удаления шума;
- кривая 4е представляет собой текущую сигнатуру Sc, вычисленную на основании очищенной от шума спектрограммы 4d.
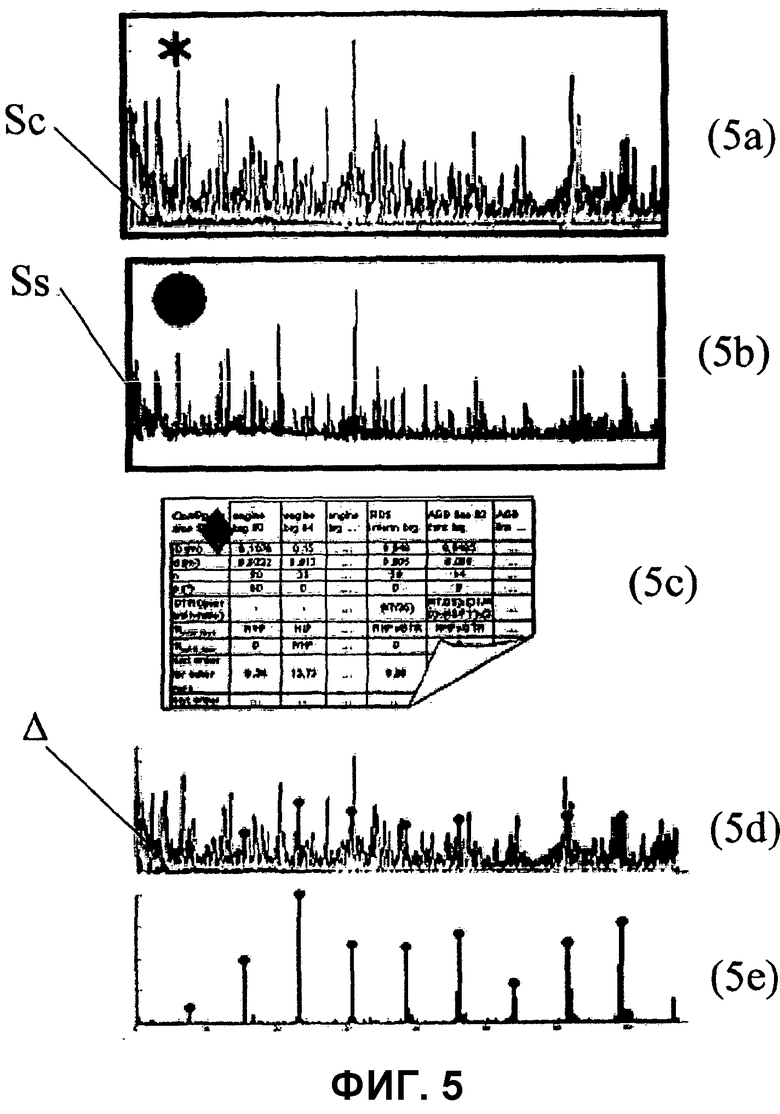
Фиг.5 - этапы вычисления степени отклонения, где:
- кривая 5а представляет собой текущую вибрационную сигнатуру Sc тестового двигателя;
- кривая 5b представляет собой нормальную вибрационную сигнатуру Ss тестового двигателя;
- таблица 5с представляет собой фрагмент базы данных дефектов подшипников двигателя;
- кривая 5d характеризует степень отклонения между нормальной вибрационной сигнатурой Ss тестового двигателя, показанной на кривой 5b, и его текущей сигнатурой Sc, показанной на кривой 5а;
- кривая 5е характеризует степень соответствия между вычисленной степенью отклонения, показанной на кривой 5d, и дефектами, представленными в таблице 5с.
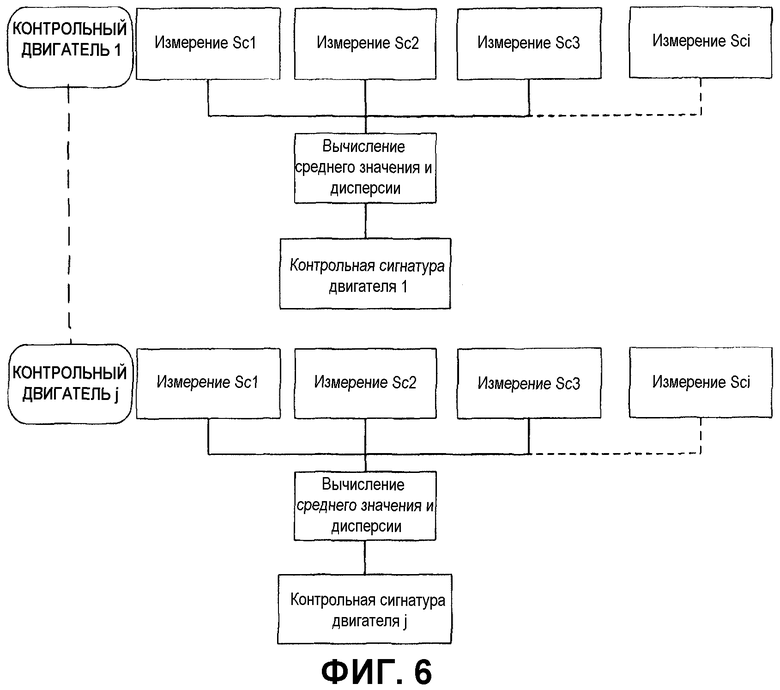
Фиг.6 - этап получения контрольных сигнатур двигателей одного семейства на основании текущих сигнатур упомянутых двигателей.
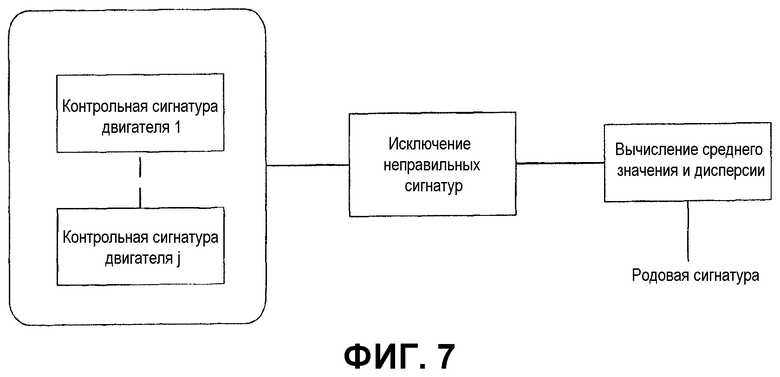
Фиг.7 - этап получения родовой эталонной сигнатуры Sfam на основании множества контрольных сигнатур Sref двигателя.
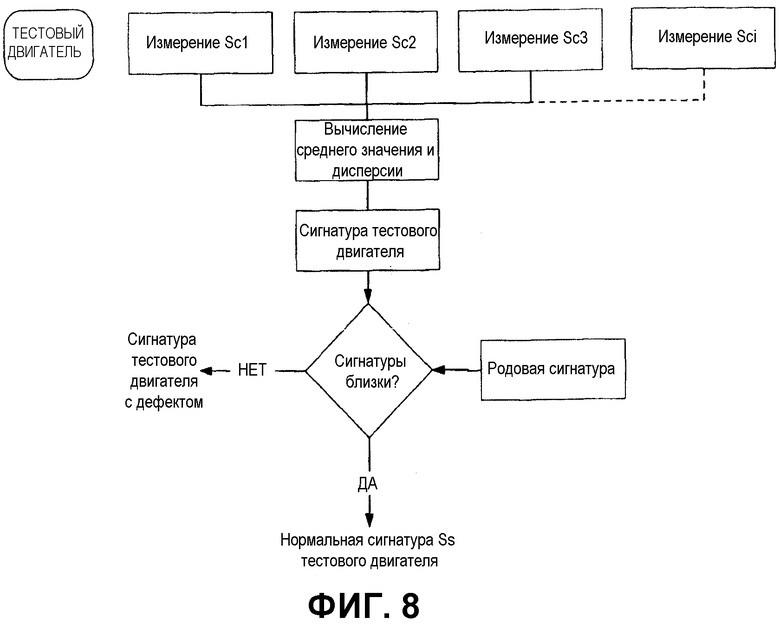
Фиг.8 - этап подтверждения сигнатуры тестового двигателя.
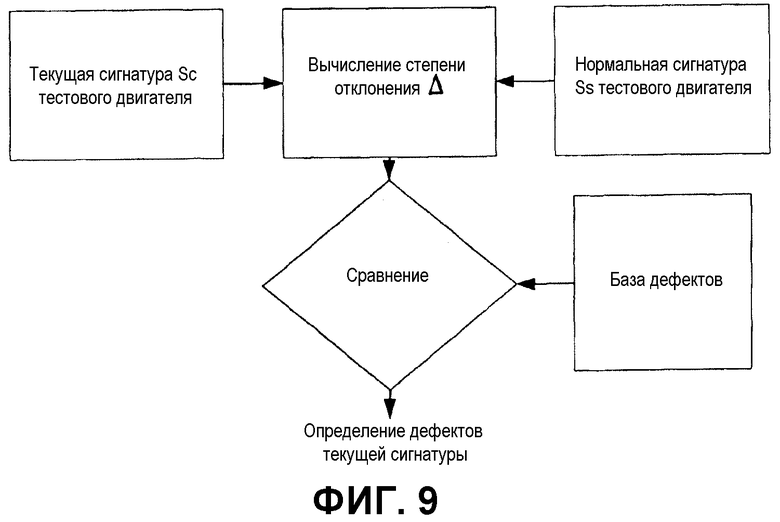
Фиг.9 - этап сравнения текущей сигнатуры Sc тестового двигателя с нормальной сигнатурой Ss двигателя для определения дефектов опорных подшипников двигателя.
На фиг.1 представлены этапы способа в соответствии с изобретением.
В целом, изобретение можно применять для любого типа двигателя, который содержит, по меньшей мере, один вращающийся вал и, по меньшей мере, один опорный подшипник. Среди этих двигателей можно указать, например, газотурбинные двигатели для самолета или вертолета, наземные газовые турбины, коробки агрегатов, приводы колесных осей и т.д.
Принцип, на котором основано изобретение, состоит в том, что частота, появляющаяся в результате повреждения подшипника, пропорциональна скорости вращения вращающегося вала, поддерживаемого подшипником. Изобретение исходит из предположения, что эта частота передается на датчик ускорения через компоненты двигателя, которые сами по себе вибрируют, в частности, на основных частотах. Целью изобретения является измерение общего вибрационного сигнала, отражающего дефекты множества подшипников. Чтобы выявить эти дефекты, сигнал измеряют во время изменения режима двигателя, то есть во время изменения режимов вращения валов.
(S1) Определение периода измерения Р
На первом этапе (S1) заявленного способа определяют период измерения Р, в течение которого может меняться режим вала N. Например, режим вала N меняется между работой на малых оборотах и работой на больших оборотах. Учитывая, что режим N меняется значительно, измеряемые сигналы вибрации имеют самый разный характер, и одно и то же повреждение подшипника характеризуется разной вибрацией в зависимости от режима двигателя.
Такое определение периода измерения Р в корне отличается от обычной практики специалистов, которые отдают предпочтение устоявшемуся режиму двигателя, то есть работе на постоянном режиме, чтобы иметь возможность получать изменения одного характера и, следовательно, возможность их сравнения и идентификации. Заявитель пошел совсем по другому пути, отдав приоритет разнородности измеряемых вибраций, чтобы иметь возможность обнаруживать большое число повреждений, проявляющихся, когда двигатель работает с переменным режимом.
Кроме того, заявитель рассматривает как работу на малооборотном режиме, так и работу на высокооборотном режиме, тогда как известные методы были сосредоточены только на узком диапазоне рабочего режима. Известные методы требовали отдельных измерений для каждого режима, что приводило к ошибкам в интерпретации и к неточному обнаружению повреждений, если сравнивать результаты на малооборотном и высокооборотном режимах.
Выбрав такой период измерения Р, заявитель преодолел, таким образом, предрассудок, связанный с необходимостью анализа при устоявшей работе, а также предрассудок, связанный с необходимостью анализа на данном режиме.
Таким образом, период измерения Р определяют в зависимости от режима или режимов вращения вала в течение времени. Далее будет рассмотрен случай обнаружения повреждения межвального опорного роликоподшипника, поддерживающего во вращении вращающийся вал ротора низкого давления по отношению к вращающемуся валу ротора высокого давления газотурбинного двигателя и содержащего наружное кольцо, связанное с валом высокого давления, и внутреннее кольцо, связанное с валом низкого давления. В случае газотурбинного двигателя настоящее изобретение можно также применять для обнаружения повреждения опорного шарикоподшипника или роликоподшипника, поддерживающего во вращении только один вращающийся вал по отношению к неподвижному элементу двигателя.
В дальнейшем тексте описания обозначения N1 и N2 будут использованы для временных режимов вращения соответственно вала низкого давления и вала высокого давления газотурбинного двигателя, поддерживаемых опорным подшипником. Определение периода измерения Р сначала предусматривает вычисление режимов вращения различных компонентов, например, при помощи тахометрических датчиков, расположенных в двигателе.
Режим вращения позволяет выбрать периоды измерения для адекватных рабочих диапазонов, воспроизводимых от одного полета к другому, что позволяет осуществлять измерения, сравнимые для каждого полета. Чтобы иметь возможность определить, является ли рабочий диапазон адекватным, вычисляют временные производные режима вращения, как показано на фиг.2b.
Предпочтительно период измерения Р должен иметь минимальную продолжительность, чтобы иметь возможность осуществить последующие этапы способа, например, преобразование Фурье. Кроме того, предусматривают максимальный период, чтобы ограничить занимаемые объемы памяти во время осуществления последующих этапов обработки.
В этом варианте выполнения период измерения Р определяют, устанавливая:
- минимальный порог, соответствующий нижнему режиму, и максимальный порог, соответствующий верхнему режиму, для режима вращения каждого вала (N1, N2), при этом в данном примере минимальный порог равен 20% максимального режима вала, а максимальный порог соответствует максимальному режиму, допустимому для двигателя;
- минимальный порог и максимальный порог на производных режимов вращения каждого вала (N1, N2); в этом примере минимальный режим равен 10% максимального допустимого режима в минуту, и максимальный порог равен, например, 200% максимального режима в минуту;
- минимальный период (в данном случае 10 секунд), при котором выполняются вышеуказанные условия, и максимальный период анализа (в данном случае 100 секунд).
В этом варианте изобретения, представленном на фиг.2, текущий вибрационный сигнал Vc измеряют во время ускорения от режима малого газа валов двигателя (малооборотный режим) до режима полного газа (высокооборотный режим).
Выше была представлена классическая логика с определенными порогами и продолжительностями, однако само собой разумеется, что можно также применять нечеткую логику. Нечеткая логика позволяет определять приемлемые периоды измерения Р, даже если не все условия строго выполняются, что снижает ограничительный характер фиксированных порогов и увеличивает число потенциальных периодов измерения Р для обеспечения обнаружения повреждений.
(S2) Считывание вибрационного сигнала
На следующем этапе (S2) в течение всего периода измерения Р считывают текущий вибрационный сигнал Vc компонентов двигателя. Такой сигнал поступает от датчика вибрации (например, акселерометра или тензометра), предварительно установленного на неподвижном компоненте двигателя.
(S3) Дискретизация вибрационного сигнала
После этого текущий вибрационный сигнал Vc дискретизируют в зависимости от режима вращения N вала в течение периода измерения Р в ходе этапа S3. В этом варианте выполнения текущий вибрационный сигнал Vc дискретизируют по частоте порядка нескольких килогерц.
(S4) Синхронизация вибрационного сигнала
После этого для диагностики повреждения подшипника соответствующим образом обрабатывают текущий вибрационный сигнал Vc. Для этого на первом этапе осуществляют повторную дискретизацию текущего вибрационного сигнала Vc в зависимости от изменений режима вращения N вала. Эти изменения режима N вала, поддерживаемого подшипником, соответствуют изменению относительной скорости вращения подшипника. Иначе говоря, вибрационный сигнал Vc синхронизируют относительно изменения относительной скорости подшипника.
В случае подшипника, наружное кольцо которого является неподвижным и связано с неподвижным элементом двигателя и внутреннее кольцо которого поддерживает вал, относительная скорость подшипника соответствует режиму вращения вала, поддерживаемого подшипником. В случае межвальной опоры с одинаковым направлением вращения относительная скорость является разностью между режимами вращения двух валов. Для межвальной опоры противоположного вращения относительная скорость является суммой режимов вращения двух валов.
Чтобы лучше понять принцип синхронизации вибрационного сигнала Vc, применим этап синхронизации для текущего вибрационного сигнала Vc простой формы, как показано на фиг.3с.
Как показано на фиг.3с, текущий вибрационный сигнал Vc измеряют за период изменения Р, в течение которого относительная скорость подшипника, то есть режим N увеличивается в течение времени, при этом режим N вала, с которым связан подшипник, возрастает, как показано на фиг.3а, и текущий вибрационный сигнал Vc имеет частоту, все более увеличивающуюся в течение времени, как показано на фиг.3с.
Таким образом, если преследуют цель измерения амплитуд изменения на текущем вибрационном сигнале Vc в течение времени с постоянным разрешением, текущий вибрационный сигнал Vc можно легко анализировать в начале периода измерения Р, пока синусоиды отстоят друг от друга, тогда как разрешение является недостаточным в конце периода измерения Р, когда синусоиды находятся близко друг к другу, то есть разрешение не является достаточным для анализа. В этом случае говорят, что в конце периода измерения текущий вибрационный сигнал Vc сжимается.
Это явление не встречалось в известных решениях, учитывая, что измерения производились на устоявшемся режиме без изменения режима двигателя. Выбор заявителя в пользу обнаружения при переменном режиме идет в разрез с известными методами. Действительно, выбор периода измерения при переменном режиме для специалиста равнозначен отказу от традиционных методов обработки, которые подходят только для установившихся сигналов.
Для решения этой проблемы текущий вибрационный сигнал Vc синхронизируют по относительной скорости подшипника по отношению к режиму вращения двигателя. Как показано на кривой 3b фиг.3, определяют время, необходимое для одного оборота подшипника, при этом кривая 3b является кривой углового пути. Оборот подшипника соответствует обороту внутреннего кольца в неподвижной системе координат наружного кольца. Кривую 3b можно легко получить посредством интегрирования функции кривой 3а, характеризующей относительную скорость подшипника по отношению к времени. Эта синхронизация представляет собой скользящую модуляцию, позволяющую распределить текущий сигнал по периоду измерения Р.
Как показано на фиг.3с, после этого остаточно спроецировать текущий вибрационный сигнал Vc на кривую углового пути 3b, чтобы получить синхронизированный текущий вибрационный сигнал Vc, синусоиды которого равномерно отстоят друг от друга, что показывает, что различные частоты текущего вибрационного сигнала Vc больше не являются взаимосвязанными. Для проецирования производят новую дискретизацию сигнала, выделяя точки, равномерно распределенные на кривой углового пути 3b.
На фиг.3 представлен пример синхронизации текущего вибрационного сигнала Vc, который специалист без труда может транспонировать на более сложный вибрационный сигнал с менее линейным изменением режима вращения N.
Синхронизация текущего вибрационного сигнала Vc, измеренного частично на малооборотном режиме и частично на высокооборотном режиме, в зависимости от относительной скорости подшипника позволяет облегчить дальнейшие этапы обработки, что будет показано ниже.
Проще говоря, за счет операции синхронизации в зависимости от режима вращения N дискретный сигнал с постоянной частотой преобразуют в дискретный сигнал с частотой, пропорциональной режиму.
(S5) Формирование спектрограммы
На следующем этапе (S5) дискретный и синхронизированный вибрационный сигнал Vsync преобразуют в частотный сигнал для получения частотных спектральных полос, упорядоченных по режиму вращения N вала, что соответствует созданию спектрограммы, упорядоченной по N. Такой тип спектрограммы порядков известен специалисту.
Можно отметить, что за счет синхронизации текущего вибрационного сигнала Vc получают спектрограмму, соответствующую известным решениям, в которых текущий вибрационный сигнал Vc получают при устоявшемся режиме.
Предварительная синхронизация вибрационного сигнала, подробно описанная на этапе (S4), позволяет сформировать спектрограмму, содержащую горизонтальные линии, как показано на кривой 4b фиг.4. Сигнал был синхронизирован относительно режима вращения вала, показанного на кривой 4с, при этом каждая спектральная полоса соответствует частоте вращения синхронизированного вибрационного сигнала. С математической точки зрения частоты вращения синхронизированного вибрационного сигнала Vsync разлагаются в математической базе порядков.
Таким образом, спектрограмма содержит горизонтальные линии, амплитуда которых меняется в течение периода измерения Р, при этом амплитуда линии представлена уровнем серого цвета, как показано на кривой 4b фиг.4.
Показанная на фиг.4b спектрограмма является спектрограммой спектральных плотностей мощности, известной специалистам под ее английским названием “PSD” от “Power Spectral Density”, при этом основными параметрами вычисления этой спектрограммы являются число точек для быстрого преобразования Фурье (FFT) и перекрывание скользящего окна для FFT, и эти параметры хорошо известны специалистам.
Разумеется, можно получать также другие типы спектрограмм, главное, чтобы они были упорядочены по режиму N вала для получения горизонтальных спектральных линий, то есть линий постоянного порядка.
Предпочтительно осуществляют этап удаления шума из спектрограммы порядка, чтобы получить спектрограмму, содержащую только спектральные полосы, необходимые для обнаружения повреждения подшипников.
После формирования спектрограммы порядков она в основном содержит три типа информации:
- тонкие горизонтальные линии, характерные для активности, связанной с режимом вращения (например, в случае авиационного двигателя: дисбалансы, зубчатые передачи, лопаточные переходы, подшипники), причем эти горизонтальные полосы соответствуют надлежащей информации;
- наклонные линии, характерные для активности, связанной с режимами вращения других механически независимых роторов, причем эта составляющая является исключительно важной, когда режим вращения меняется между малооборотным режимом и высокооборотным режимом. Наклонность линий связана с синхронизацией вибрационного сигнала относительно режима вращения вала;
- энергетические сглаживания, соответствующие модам конструкций двигателя, при этом конструкционная мода соответствует, например, естественному резонансу конструкции картера газотурбинного двигателя на ее подвесках.
Два последних типа информации соответствуют шумам, которые необходимо удалять. Целью настоящего этапа является удаление энергетических сглаживаний (третий тип информации). Для этого алгоритм удаления шума содержит следующие этапы:
- каждую вертикальную линию спектрограммы (вдоль частот) просматривают при помощи скользящего окна заранее определенного размера;
- идентифицируют конструкционные моды, вычисляя для каждого скользящего окна среднее значение или процентиль амплитуд, присутствующих в скользящем окне;
- определяют значение амплитудных пиков, изымая конструкционные моды из вертикальной линии спектрограммы;
- вычисляют соотношение (значение амплитудных пиков/конструкционные моды) для получения новой линии спектрограммы порядков, не содержащей шумов; и
- переходят к следующей вертикальной линии.
Как представлено спектрограммой 4d на фиг.4, получают новую спектрограмму порядков, не содержащую шумов, связанных с энергетическими сглаживаниями; при этом говорят, что спектрограмма порядков 4d очищена от шумов.
(S6) Получение текущей вибрационной сигнатуры
Вычисляют среднее временное значение амплитуд спектральных полос (этап S6). На этом этапе:
- просматривают каждую горизонтальную линию спектрограммы порядков, при этом предпочтительно из спектрограммы предварительно удаляют шумы;
- вычисляют среднее значение амплитуд вдоль оси времени.
Кривая 4е на фиг.4 представляет собой среднее значение амплитуд спектральных полос в зависимости от порядков режима вращения: это среднее значение амплитуд соответствует текущей вибрационной сигнатуре Sc двигателя. Она содержит все характеристические амплитуды частот двигателя в области порядков.
Среднее временное значение согласно настоящему изобретению представляет особый интерес с учетом предварительного этапа синхронизации (S4), который привел к наклонному распределению шума режимов, связанных с другими подшипниками, на спектрограммах. Поскольку шум режимов является наклонным, вычисление среднего значения амплитуд в горизонтальном направлении позволяет сгладить шум режимов. Таким образом, в текущей вибрационной сигнатуре Sc этот шум имеет слабую и постоянную амплитуду. Таким образом, все, что не упорядочено, подавляется эффектом усреднения, что позволяет выделить появление упорядоченных явлений, например, дефекта межвального подшипника.
(S7) Определение повреждений
Вычисляют степень отклонения между ранее вычисленной текущей вибрационной сигнатурой Sc двигателя и заранее установленной нормальной вибрационной сигнатурой Ss двигателя, которая содержит все характеристические амплитуды частот нормального двигателя в области порядков. Далее следует более подробное описание получения нормальной вибрационной сигнатуры Ss двигателя.
- Получение нормальной вибрационной сигнатуры Ss двигателя
Нормальная вибрационная сигнатура Ss двигателя является сигнатурой, характерной для каждого нормального двигателя. Эта нормальная вибрационная сигнатура двигателя содержит множество опорных параметров для каждого вибрационного (или акустического) датчика, для каждого режима работы (рабочие диапазоны) и для каждой области (область частот, область порядков режима и т.д.).
Опорный параметр нормальной вибрационной сигнатуры Ss состоит из следующих элементов: среднее значение и типовое отклонение или срединное значение и межквартильный размах. Эти значения определяют на основании считывания и анализа на первых полетах упомянутого двигателя, то есть на основании первых текущих сигнатур двигателя. Действительно, считается, что во время своих первых полетов двигатель не имеет дефектов. Нормальную сигнатуру Ss двигателя используют в качестве контрольной для применения способа обнаружения на данном двигателе.
Нормальная вибрационная сигнатура Ss двигателя соответствует измерению всех релевантных параметров, необходимых для обнаружения повреждения подшипника, которые были уже измерены на нормальном двигателе. Поскольку нормальную вибрационную сигнатуру Ss используют в качестве контрольной для определения степени отклонения, важно, чтобы эта нормальная вибрационная сигнатура Ss действительно соответствовала нормальному двигателю, а не поврежденному двигателю. В противном случае нормальные подшипники могут быть признаны поврежденными и наоборот. Для этого осуществляют предварительный этап подтверждения нормальной вибрационной сигнатуры Ss двигателя.
- Подтверждение нормальной вибрационной сигнатуры Ss двигателя
Для подтверждения нормальной вибрационной сигнатуры Ss двигателя формируют родовую эталонную сигнатуру Sfam, которая является контрольным показателем нормального поведения семейства двигателей. Во время получения нормальной вибрационной сигнатуры Ss двигателя (то есть сигнатуры, характерной для каждого двигателя) эта родовая сигнатура Sfam позволяет подтвердить, что эта нормальная вибрационная сигнатура Ss характеризует нормальный двигатель.
Как показано на фиг.7, родовую сигнатуру Sfam семейства двигателей вычисляют на основании индивидуальных вибрационных сигнатур множества двигателей одного семейства, называемых контрольными сигнатурами Sref двигателя. Родовую сигнатуру Sfam определяют посредством усреднения контрольных сигнатур Sref двигателей семейства (среднее из средних значений и среднее значение дисперсий).
Каждую контрольную сигнатуру Sref определяют посредством усреднения текущих индивидуальных сигнатур упомянутого двигателя (среднее из средних значений и среднее значение дисперсий), как показано на фиг.6. Метод формирования текущей индивидуальной сигнатуры для контрольного двигателя соответствует предыдущим этапам S1-S6, осуществленным на первых полетах упомянутого контрольного двигателя.
Как показано на фиг.7, для получения родовой сигнатуры Sfam на основании контрольных сигнатур Sref убеждаются, что все контрольные сигнатуры Sref характеризуют нормальное поведение двигателей, например, исключая предельные контрольные сигнатуры Sref при помощи метода процентилей или применяя метод типа «все, кроме одного», известный специалистам под английским названием “leave-one-out cross validation”, согласно которому для каждой контрольной сигнатуры Sref двигателя вычисляют степень несоответствия контрольной сигнатуры Sref относительно временной родовой сигнатуры Y, сформированной на основании всех других контрольных сигнатур Sref других двигателей.
После этого проверяют, чтобы степень родового несоответствия контрольной сигнатуры Sref не превышала определенный порог несоответствия. Иначе говоря, проверяют, чтобы контрольная сигнатура двигателя не слишком сильно отличалась (с точки зрения статистического разброса) от временной родовой сигнатуры. В случае превышения порога несоответствия контрольной сигнатурой Sref, ее считают неправильной.
Этот метод повторяют для всех контрольных сигнатур Sref и из совокупности контрольных сигнатур Sref исключают неправильные. Оставшиеся индивидуальные контрольные сигнатуры усредняют для получения родовой сигнатуры Sfam семейства двигателей.
После получения родовой сигнатуры Sfam для любого нового двигателя формируют нормальную вибрационную сигнатуру Ss на основании множества текущих вибрационных сигнатур двигателя во время его первых полетов. Действительно, именно во время первых полетов двигателя его подшипники могут быть нормальными. Для подтверждения нормальной вибрационной сигнатуры Ss этого двигателя достаточно убедиться, что нормальная вибрационная сигнатура Ss этого двигателя не слишком отличается от родовой сигнатуры Sfam с точки зрения статистического отклонения. Предпочтительно для упомянутой нормальной сигнатуры вычисляют новую степень несоответствия относительно родовой сигнатуры Sfam.
Если сравнение нормальной вибрационной сигнатуры Ss двигателя с родовой сигнатурой Sfam выявляет существенное отклонение, то поведение анализируемого двигателя считают нетипичным: более подробный анализ должен позволить идентифицировать причину этой аномалии. Во всех случаях не подтвержденную нормальную вибрационную сигнатуру Ss двигателя отбрасывают. Если нормальная сигнатура Ss для двигателя подтверждена, она служит в качестве контрольной для метода определения повреждения двигателя.
- Вычисление степени отклонения Δ
Как показано на фиг.5, вычисляют степень отклонения Δ (кривая 5d) между ранее вычисленной текущей вибрационной сигнатурой Sc двигателя (кривая 5а) и предварительно подтвержденной нормальной вибрационной сигнатурой Ss двигателя (кривая 5b).
Предпочтительно степень отклонения Δ вычисляют регулярно (например, один раз за полет), чтобы отслеживать развитие повреждения каждого из подшипников двигателя.
Сравнение текущей вибрационной сигнатуры Sc с нормальной вибрационной сигнатурой Ss можно производить разными способами.
Если нормальная вибрационная сигнатура Ss отмечается всего во время нескольких полетов, обычно менее десяти полетов, дисперсия не является корректной в каждой точке области порядков, и следует вычислить степень отклонения альфа Δα при помощи нижеследующего уравнения, где n соответствует числу типовых отклонений, ниже которого существенное отклонение не желательно, Sc соответствует значению текущей вибрационной сигнатуры, и Ss соответствует значению нормальной вибрационной сигнатуры.
Δα=максимум(0, Sc-(Ss=n×дисперсия1/2))
В альтернативном варианте, когда нормальная вибрационная сигнатура Ss является достаточно «насыщенной», как правило, отмечаемой в течение более десятка полетов, для каждой точки области порядков вычисляют степень отклонения бета Δβ, известную специалисту под названием “z-score”, при помощи нижеследующего уравнения.
Δβ=(Sc-Ss)/(дисперсия)1/2
Иначе говоря, в результате сравнения получают степень отклонения Δ (альфа или бета) между текущей вибрационной сигнатурой Sc и нормальной вибрационной сигнатурой Ss, которая позволяет характеризовать амплитуду порядков повреждений, при этом порядки, связанные с собственной работой двигателя, вычитают или сглаживают посредством вычисления степени отклонения. Говоря другими словами, степень отклонения Δ характеризует искажение, обнаруженное в текущей вибрационной сигнатуре Sc.
Степень отклонения Δ согласно изобретению является исключительно релевантной, поскольку она учитывает нормальную сигнатуру Ss двигателя, на котором производят обнаружение повреждения. Кроме того, нормальную сигнатуру Ss вычисляют специально для упомянутого двигателя, при этом вычисленная степень отклонения является более релевантной, чем отклонение, полученное только на основании порогов, как в известных решениях.
В альтернативном варианте ранее вычисленную текущую вибрационную сигнатуру Sc двигателя напрямую сравнивают с описанной выше родовой сигнатурой Sfam, не прибегая к вычислению нормальной сигнатуры Ss двигателя. Предпочтительно родовую сигнатуру Sfam можно использовать на большом числе двигателей, что ускоряет обнаружение износа для всех двигателей, поскольку нет необходимости искать нормальную сигнатуру Ss двигателя в базе данных нормальных сигнатур Ss.
(S8) Идентификация повреждений
Применяют базу данных указателей дефектов, объединяющую теоретические повреждения опорных подшипников двигателя. Эта база выражена в области порядков.
При этом можно определить наличие повреждения подшипника и идентифицировать этот подшипник, сканируя, - для каждого подшипника и для каждого компонента подшипника, - указатели дефектов, построенные на основании характеристических частот этого подшипника (по каждому компоненту).
Действительно, характеристические частоты повреждения подшипника являются функциями, которые зависят от геометрии подшипника, от числа элементов качения и от скорости вращения валов. Кратные характеристической частоты поврежденного подшипника могут быть целыми кратными. Таким образом, повреждение подшипника можно представить в виде гребенки частот (fcar, f2car, f3car… Fncar), которая записана в базе данных по указателю дефектов (частично представлена в виде таблицы 5с).
Вычисленную степень отклонения Δ сравнивают с каждым из указателей из базы данных. Для каждого инкремента гребенки вычисляют среднее значение гребенки путем деления суммы амплитуд гребенки на число зубьев гребенки. Вычисление максимумов для каждой гребенки позволяет идентифицировать, в случае необходимости, повреждение подшипника во время текущего полета.
Классически вычисляют соотношение R между каждым амплитудным пиком гребенки и соответствующей амплитудой предварительно вычисленной степени отклонения Δ, как показано на фиг.5е. Это соотношение R сравнивают, по меньшей мере, с одним заранее определенным порогом повреждения, чтобы определить, поврежден ли подшипник.
Для этого на основании среднего значения, определенного с разными нормальными двигателями и посредством разных считываний во время испытаний, определяют уровень амплитуды для нормального подшипника. Что касается порогов повреждения, их определяют на основании испытаний с поврежденным подшипником или на основании опыта с поврежденными подшипниками, подобными подшипнику, для которого необходимо определить пороги.
Согласно предпочтительному отличительному признаку изобретения соотношение R между амплитудным пиком и уровнем амплитуды, определенным для нормального подшипника, сначала сравнивают с нижним порогом повреждения. Разумеется, можно предусмотреть сравнение соотношения R с числом порогов повреждения более двух, чтобы еще больше повысить точность определения степени повреждения подшипника.
Заявленное изобретение относится к области измерительной техники, и может быть использовано для контроля износа двигателя. Способ содержит следующие этапы: в течение всего периода измерения Р считывают текущий вибрационный сигнал (Vc) механической вибрации компонентов двигателя; в течение периода P дискретизируют сигнал (Vc); сигнал синхронизируют относительно изменений режима N; сигнал преобразуют в частотный сигнал для получения частотных спектральных полос, упорядоченных по режиму N; вычисляют среднее значение амплитуд спектральных полос, чтобы получить текущую вибрационную сигнатуру (Sc) двигателя; вычисляют степень отклонения (Δ) между сигнатурой (Sc) и нормальной контрольной вибрационной сигнатурой (Ss); и степень отклонения (Δ) сравнивают с указателями дефектов заранее сформированной базы данных, объединяющей теоретические повреждения опорных подшипников двигателя, для определения потенциальных повреждений опорного подшипника. Технический результат заключается в возможности проведения диагностики в реальном времени и повышении точности обнаружения дефектов на различных режимах вращения вала двигателя. 11 з.п. ф-лы, 9 ил. 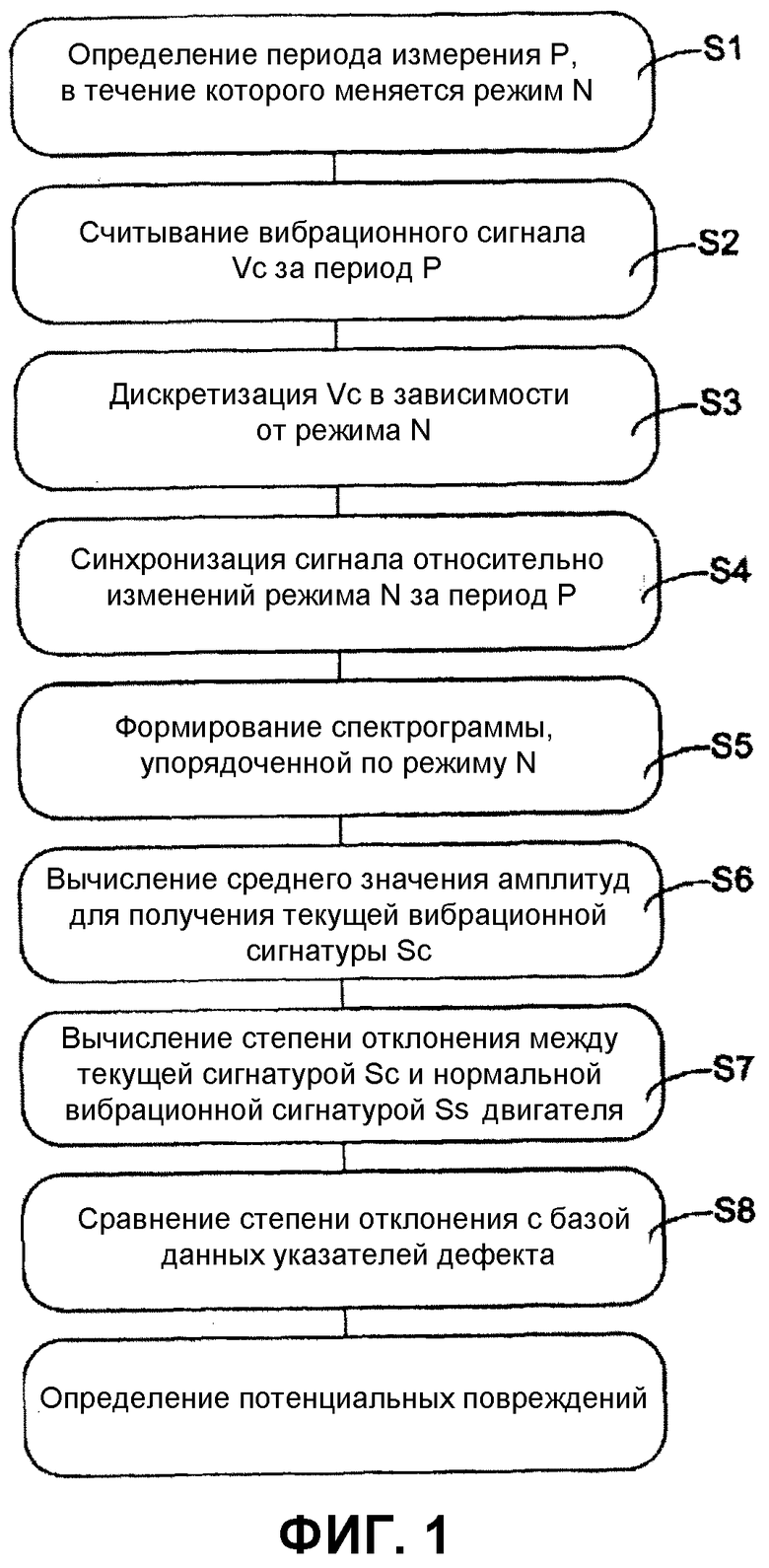
1. Способ обнаружения повреждения, по меньшей мере, одного опорного подшипника, поддерживающего во вращении, по меньшей мере, один вращающийся вал двигателя, отличающийся тем, что содержит этапы, на которых:
а) определяют (S1) период измерения P, во время которого режим N вала меняется между малооборотным режимом и высокооборотным режимом;
b) в течение всего периода измерения Р считывают (S2) текущий вибрационный сигнал (Vc) механической вибрации компонентов двигателя;
c) в течение периода измерения P дискретизируют (S3) текущий вибрационный сигнал (Vc);
d) дискретный вибрационный сигнал синхронизируют (S4) относительно изменений режима N двигателя за период измерения P;
e) дискретный и синхронизированный вибрационный сигнал (Vsync) преобразуют (S5) в частотный сигнал для получения частотных спектральных полос, упорядоченных по режиму N вращения вала;
f) вычисляют (S6) среднее значение амплитуд спектральных полос, чтобы получить текущую вибрационную сигнатуру (Sc) двигателя;
g) вычисляют (S7) степень отклонения (Δ) между текущей вибрационной сигнатурой (Sc) двигателя и нормальной контрольной вибрационной сигнатурой; и
h) степень отклонения (Δ) сравнивают (S8) с указателями дефектов заранее сформированной базы данных, объединяющей теоретические повреждения опорных подшипников двигателя, для определения потенциальных повреждений опорного подшипника.
2. Способ по п.1, в котором нормальная контрольная вибрационная сигнатура является контрольной вибрационной сигнатурой (Ss) двигателя.
3. Способ по п.2, в котором нормальную вибрационную сигнатуру (Ss) двигателя получают путем вычисления среднего значения текущих вибрационных сигнатур двигателя, измеренных за определенный период эксплуатации двигателя, предпочтительно в начале эксплуатации.
4. Способ по п.3, в котором нормальную вибрационную сигнатуру (Ss) двигателя предварительно подтверждают путем сравнения с родовой эталонной сигнатурой (Sfam), определенной для семейства, к которому принадлежит упомянутый двигатель.
5. Способ по п.4, в котором родовую эталонную сигнатуру (Sfam) получают на основании нормальных контрольных сигнатур (Sref) двигателей одного семейства.
6. Способ по п.5, в котором:
- формируют набор нормальных контрольных сигнатур (Sref) для множества двигателей одного семейства,
- вычисляют степень родового несоответствия для каждой нормальной контрольной сигнатуры (Sref) путем измерения статистического отклонения между упомянутой нормальной контрольной сигнатурой (Sref) и другими нормальными контрольными сигнатурами (Sref) набора,
- из набора нормальных контрольных сигнатур (Sref) исключают сигнатуры со степенью несоответствия, превышающей определенный порог несоответствия, и
- родовую эталонную сигнатуру (Sfam) формируют на основании оставшихся контрольных вибрационных сигнатур (Sref).
7. Способ по п.6, в котором:
- степень родового несоответствия вычисляют для каждой нормальной контрольной сигнатуры (Sref), измеряя статистическое отклонение между упомянутой нормальной контрольной сигнатурой (Sref) и временной родовой сигнатурой, полученной на основании других нормальных контрольных сигнатур (Sref) набора.
8. Способ по п.1, дополнительно содержащий этап, на котором из спектрограммы удаляют шум (S5) в зависимости от конструкционных мод двигателя, при этом удаление шума производят перед вычислением (S6) среднего значения амплитуд спектральных полос.
9. Способ по п.1, в котором дискретный вибрационный сигнал синхронизируют по отношению к изменениям режима N вала за период измерения Р, производя повторную дискретизацию дискретного сигнала с постоянной частотой для получения дискретного сигнала с частотой, пропорциональной режиму N вала.
10. Способ по п.1, в котором дискретный вибрационный сигнал синхронизируют по отношению к изменениям режима N вала за период измерения P, вычисляя кривую углового пути вала в области порядков и проецируя текущий вибрационный сигнал (Vc) на упомянутую кривую углового пути для получения синхронизированного текущего вибрационного сигнала (Vsync).
11. Способ по п.1, в котором нормальная контрольная вибрационная сигнатура является родовой эталонной сигнатурой (Sfam), определенной для семейства упомянутого двигателя.
12. Способ по п.11, в котором родовую эталонную сигнатуру (Sfam) получают на основании нормальных контрольных сигнатур (Sref) двигателей одного семейства.
| FR 2913769 A1 19.09.2008; | |||
| WO 2004109250 A1 16.12.2004 | |||
| Анализатор для виброакустической диагностики вращающихся деталей | 1987 |
|
SU1483282A1 |

