Уровень техники
Изобретение в основном относится к области контроля за износом опорного подшипника качения, на котором с возможностью вращения установлен, по меньшей мере, один вращающийся вал двигателя, например, опорного подшипника, установленного между валами авиационного газотурбинного двигателя.
Предшествующий уровень техники
Опоры с подшипником качения (шарикоподшипником или роликоподшипником) широко используются в области авиации, в частности для установки с возможностью вращения валов высокого давления и низкого давления газотурбинного двигателя.
Необходимо осуществлять контроль за износом подшипников качения опор, чтобы заранее обнаружить возможное повреждение подшипника и предупредить, таким образом, поломку или серьезное повреждение опоры.
Один из известных способов контроля за износом опорного подшипника качения газотурбинного двигателя основан на принципе, согласно которому частота после повреждения подшипника пропорциональна скорости вращения вала или валов, установленных на опоре, и эта частота распространяется за счет вибраций на элементы газотурбинного двигателя. Таким образом, данный способ состоит в определении уровней вибрации элементов газотурбинного двигателя в режимах высоких оборотов. Для этого способ предусматривает во время полного цикла полета прием вибрационного сигнала, передаваемого одним или несколькими вибрационными датчиками, которые могут обнаруживать вибрации элементов газотурбинного двигателя. Обнаружение повреждения опорного подшипника качения в этом случае основано на идентификации уровней вибрации, превышающих заранее определенный порог для исправного подшипника, для которых идентифицируют один и тот же фактор. Например, в европейской патентной заявке ЕР 1111364 описан вариант осуществления такого способа.
Однако испытания с поврежденными подшипниками опор показали, что такой способ не обеспечивает систематического (надежного) обнаружения повреждения. Действительно, показания вибрационных датчиков в режиме высоких оборотов работы газотурбинного двигателя «искажаются» естественной вибрацией окружающей среды (шум от камеры сгорания, шум от аэродинамического потока, многочисленные гармоники режимов вращения валов высокого и низкого давления и т.д.), что не позволяет выделить вибрационные уровни, характерные для повреждения.
Краткое изложение сущности изобретения
Задачей настоящего изобретения является устранение указанных недостатков путем создания надежного способа, позволяющего обнаруживать повреждение опорного подшипника качения, на котором установлен, по меньшей мере, один вращающийся вал двигателя.
В соответствии с настоящим изобретением способ содержит следующие этапы:
а) определяют период измерения, соответствующий интервалу режимов вращения вала во время возобновляемой работы в режиме малых оборотов двигателя;
б) в течение всего периода измерения получают вибрационный сигнал ускорения элементов двигателя;
в) вибрационный сигнал дискретизируют в зависимости от режима вращения вала во время периода измерения;
г) дискретизированный вибрационный сигнал преобразуют в частотный сигнал для получения частотных спектральных линий, упорядоченных в зависимости от режима вращения вала;
д) вычисляют среднее значение амплитуд спектральных линий;
е) определяют амплитудные пики в области кратных чисел теоретической частоты поврежденного ролика;
ж) вычисляют соотношение между каждым амплитудным пиком и амплитудным уровнем, определенным для исправного подшипника;
з) полученное соотношение сравнивают, по меньшей мере, с одним заранее определенным пороговым значением повреждения.
Способ в соответствии с настоящим изобретением характеризуется тем, что предусматривают получение и обработку вибрационного сигнала во время возобновляемой работы в режиме малых оборотов двигателя. Таким образом, вибрационная окружающая среда менее подвержена помехам от шума, например в случае газотурбинного двигателя производится меньше шума, связанного с процессом горения и с аэродинамическим потоком, что повышает надежность обнаружения. Кроме того, было установлено, что на малых оборотах работы двигателя теоретические частоты, характерные для повреждения подшипника, являются более низкими, чем на высоких оборотах, из чего следует, что на малых оборотах можно наблюдать большее число показателей повреждения, чем на высоких оборотах. Таким образом, повреждение подшипника можно обнаружить на более ранней стадии.
Согласно предпочтительному отличительному признаку настоящего изобретения на этапе з) полученное соотношение сравнивают с нижним порогом повреждения и, если соотношение превышает нижний порог, его сравнивают с верхним порогом повреждения, чтобы определить степень возможного повреждения подшипника.
Возобновляемая работа в режиме малых оборотов двигателя, которую выбирают для определения периода измерения, может соответствовать фазе запуска или фазе остановки двигателя. Действительно, фазы запуска и остановки соответствуют режиму малых оборотов работы двигателя и являются возобновляемыми. В частности, применение способа в соответствии с настоящим изобретением во время фазы остановки или запуска газотурбинного двигателя имеет целый ряд дополнительных преимуществ: зазор опоры стремится к сужению во время этих фаз, что акцентирует проявления повреждения подшипника и облегчает, таким образом, его обнаружение; применение способа не требует больших затрат и может осуществляться по желанию, например путем запуска с немедленной остановкой газотурбинного двигателя.
Способ в соответствии с настоящим изобретением можно применять для опоры с подшипником качения, на которой установлены два вращающихся вала двигателя. В этом случае период измерения соответствует интервалу режимов вращения одного из валов во время работы двигателя на малых оборотах, и вибрационный сигнал дискретизируют в зависимости от разности режимов вращения обоих валов во время периода измерения.
На этапе е) способа в соответствии с настоящим изобретением можно определять амплитудные пики в области целых и четных кратных чисел теоретической частоты поврежденного ролика.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания со ссылками на прилагаемые чертежи, которые иллюстрируют неограничительный пример выполнения и на которых:
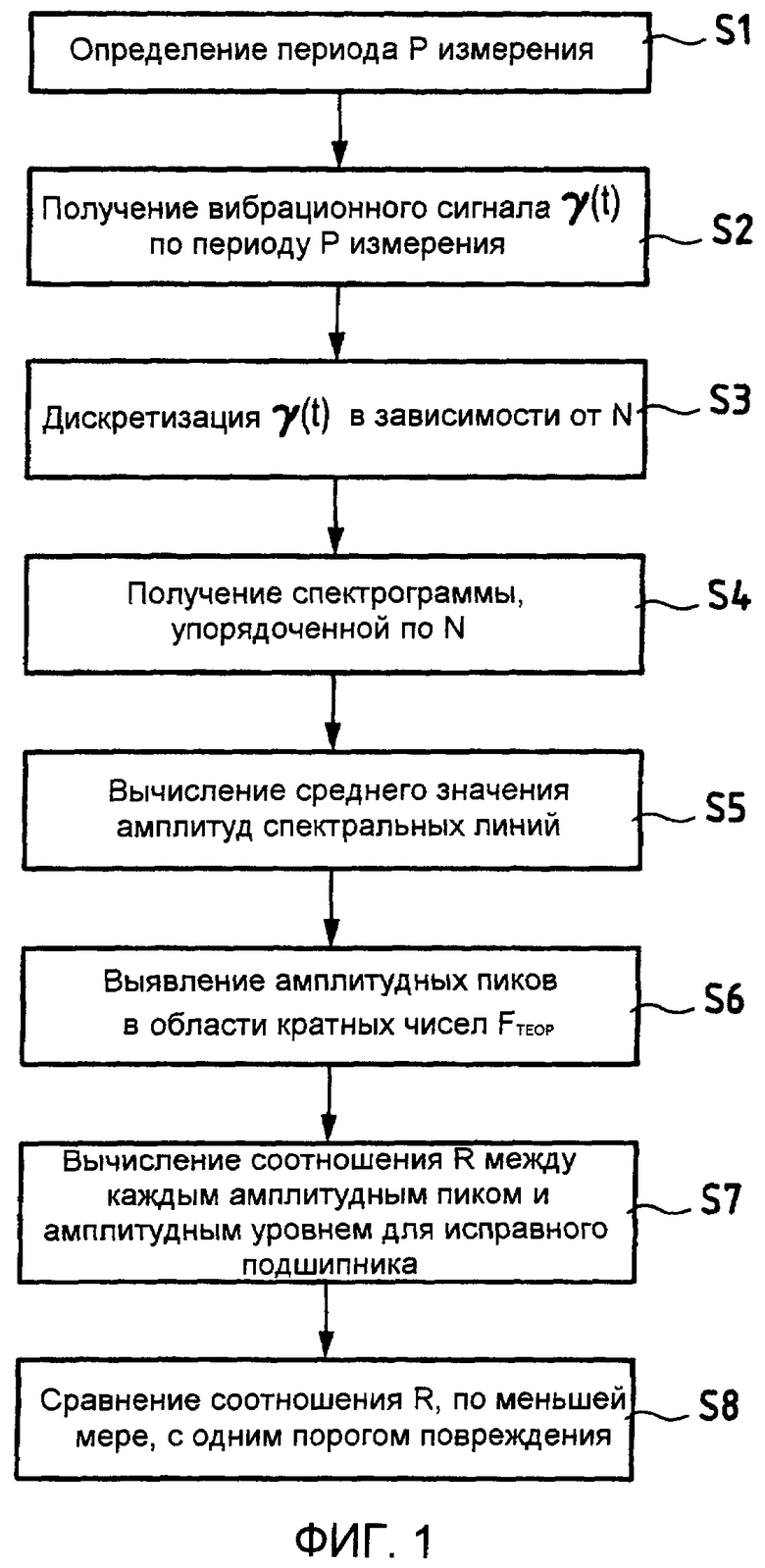
Фиг.1 - изображает блок-схему последовательности операций варианта осуществления способа согласно изобретению;
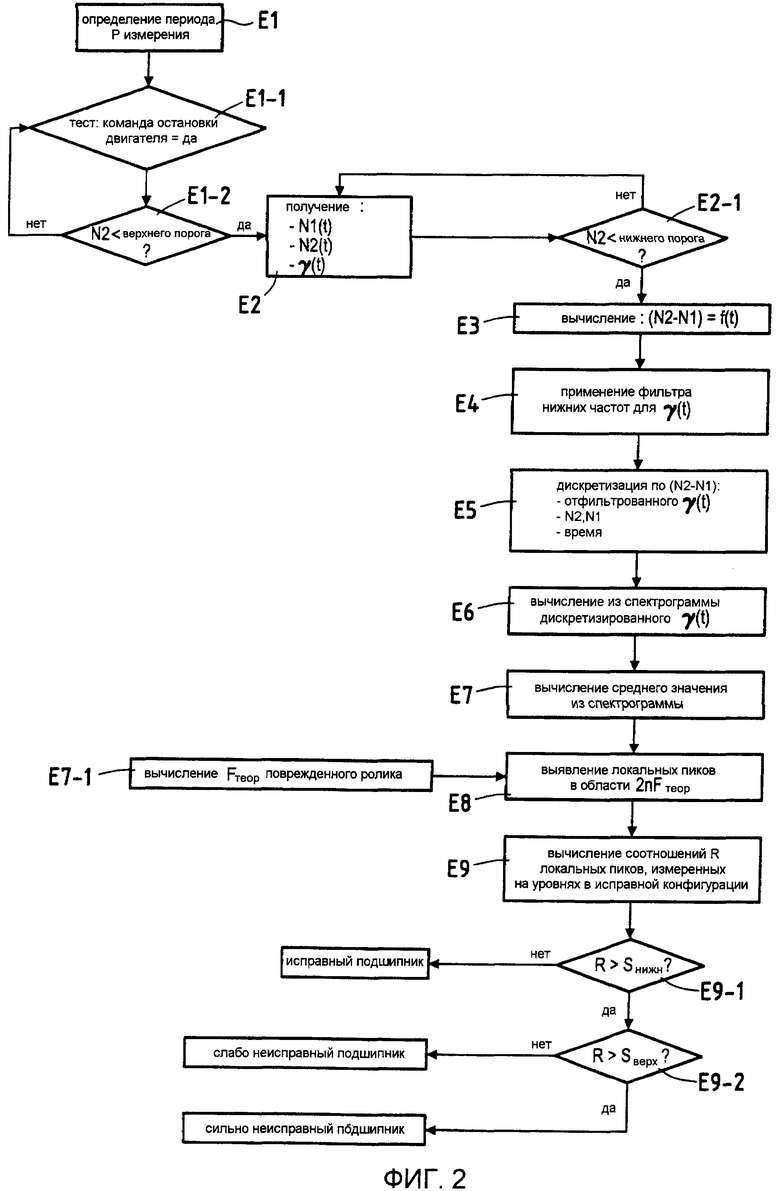
Фиг.2 - блок-схему последовательности операций способа для обнаружения повреждения промежуточного опорного подшипника валов авиационного газотурбинного двигателя согласно изобретению;
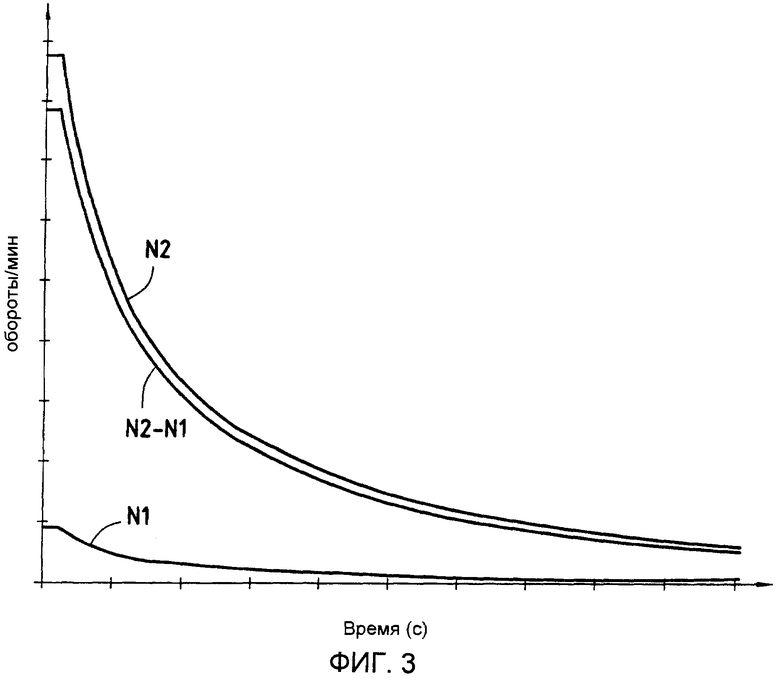
Фиг.3 - временные диаграммы N1, N2 режимов вращения вала низкого давления и вала высокого давления соответственно газотурбинного двигателя согласно изобретению;
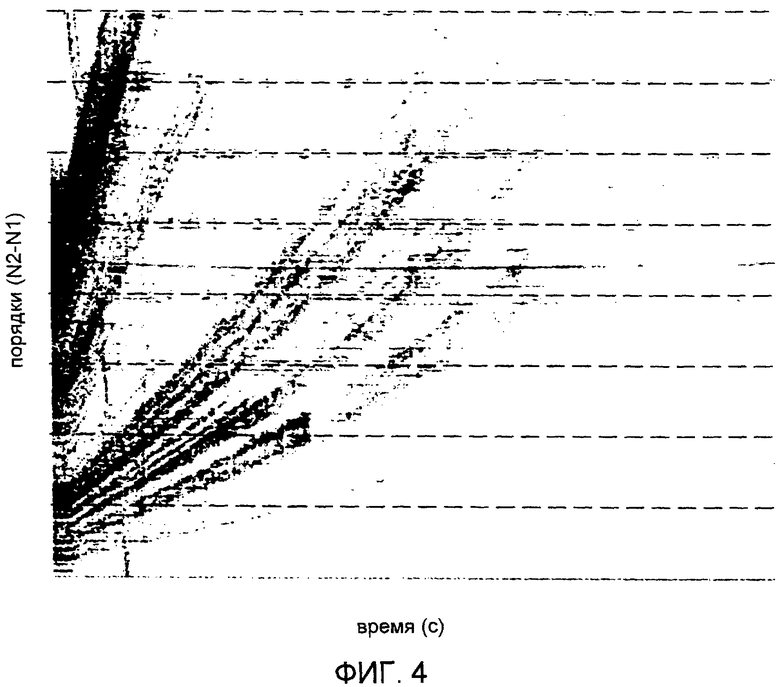
Фиг.4 - спектрограмму газотурбинного двигателя, когда скорость вращения вала падает согласно изобретению;
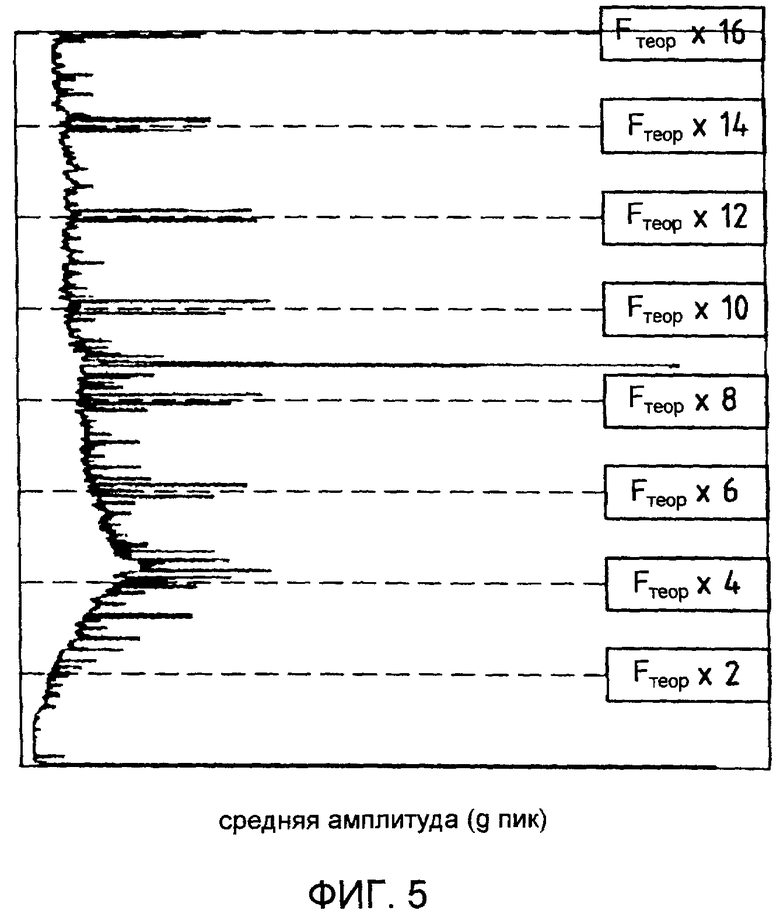
Фиг.5 - диаграмму среднего значения амплитуд спектральных линий спектрограммы согласно изобретению;
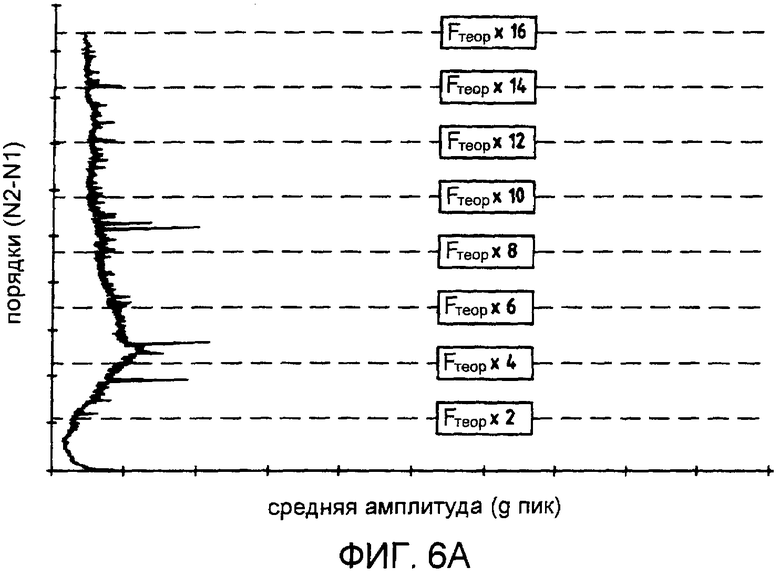
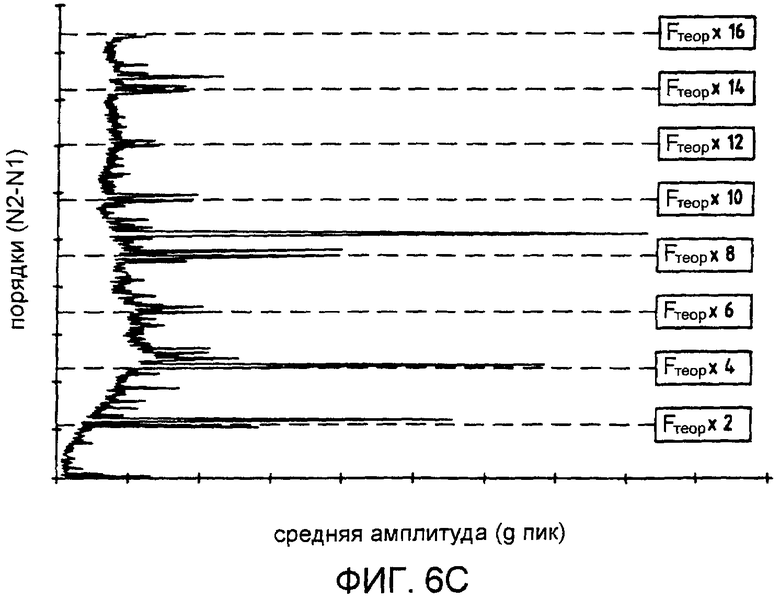
Фиг.6А-6С - соотношение между амплитудными пиками в области кратных чисел теоретической частоты поврежденного ролика и амплитудным уровнем, определенным для исправного подшипника согласно изобретению.
Подробное описание варианта выполнения изобретения
На фиг.1 показана блок-схема последовательности операции способа в соответствии с настоящим изобретением для обнаружения повреждения опорного подшипника качения, на котором установлен, по меньшей мере, один вращающийся вал двигателя.
В целом, изобретение можно применять для любого типа двигателей, который содержит, по меньшей мере, один вращающийся вал и, по меньшей мере, одну опору с подшипником и который обеспечивает возобновляемую работу на малых оборотах (фаза запуска, фаза остановки, режим малого газа, цикл малого газа и т.д.) Среди этих двигателей можно указать, например, газотурбинные двигатели (называемые также турбомашинами) для самолетов или вертолетов, наземные газовые турбины, коробки агрегатов, осевые приводы и т.д.
Принцип, на котором основано изобретение, состоит в том, что частота при повреждении подшипника качения пропорциональна скорости вращения вала, вращающегося на опоре. Предполагается, что эта частота передается на датчик ускорения через элементы двигателя, которые сами подвержены вибрациям, в частности на основных частотах.
На первом этапе (S1) способа в соответствии с настоящим изобретением определяют период Р измерения, соответствующий интервалу режимов N вращения вала во время возобновляемой работы на малых оборотах двигателя.
На следующем этапе (S2) по всему периоду Р измерения получают вибрационный сигнал γ(t) ускорения элементов двигателя. Такой сигнал поступает от датчика ускорения (например, акселерометра или тензометра), предварительно установленного на неподвижном элементе двигателя.
После этого на этапе S3 вибрационный сигнал γ(t) дискретизируют в зависимости от режима N вращения вала во время периода Р измерения.
На следующем этапе (S4) дискретизированный вибрационный сигнал преобразуют в частотный сигнал для получения частотных спектральных линий, упорядоченных в зависимости от режима N вращения вала, что соответствует получению спектрограммы, упорядоченной по N.
Затем вычисляют (этап S5) временное среднее значение амплитуд спектральных линий и определяют (этап S6) амплитудные пики, которые располагаются вокруг теоретической частоты Fтеор поврежденного ролика.
После этого вычисляют (этап S7) соотношение R между каждым амплитудным пиком и амплитудным уровнем, определенным для исправного подшипника, для его сравнения, по меньшей мере, с одним заранее определенным пороговым значением повреждения (этап S8). В зависимости от результата этого сравнения можно определить, является ли подшипник поврежденным или исправным.
На фиг.2 показана блок-схема последовательности операций способа, иллюстрирующая частный вариант выполнения способа в соответствии с настоящим изобретением.
В этом частном варианте рассмотрен случай обнаружения повреждения роликоподшипника промежуточной опоры валов авиационного газотурбинного двигателя. Например, на такой промежуточной опоре установлен вращающийся вал низкого давления с возможностью вращения по отношению к вращающемуся валу высокого давления газотурбинного двигателя.
В случае газотурбинного двигателя изобретение можно также применять для обнаружения повреждения шарикоподшипника или роликоподшипника опоры, на которой с возможностью вращения установлен только один вал, вращающийся относительно статора.
Кроме того, описанный ниже частный вариант осуществления способа в соответствии с настоящим изобретением применяется к фазе остановки газотурбинного двигателя, которая является возобновляемой фазой и происходит на малых оборотах. Способ можно также применять для любой другой возобновляемой фазы на малых оборотах газотурбинного двигателя, например для фазы запуска.
В дальнейшем описании позиции N1 и N2 (фиг.3) обозначают временные режимы вращения соответственно вала низкого давления и вала высокого давления газотурбинного двигателя, установленных на опоре.
На первом этапе (Е1) способа в соответствии с настоящим изобретением определяют период Р измерения, соответствующий интервалу режимов вращения одного из двух валов газотурбинного двигателя во время фазы его остановки.
Для газотурбинного двигателя период Р измерения определяют в зависимости от режима N2 вращения вала высокого давления, и интервал режимов вращения ограничен между нижним порогом порядка нескольких сот оборотов в минуту и верхним порогом порядка нескольких тысяч оборотов в минуту.
На следующем этапе (Е2) по всему периоду Р измерения получают цифровые сигналы, характеризующие режимы N1, N2 вращения валов низкого и высокого давления, и цифровой вибрационный сигнал γ(t) ускорения элементов газотурбинного двигателя.
Измерение режимов N1 и N2 вращения производят при помощи датчиков скорости, установленных на этих валах, например, цифровых тахометров. Что касается вибрационного сигнала γ(t), то он может поступать от датчика ускорения, установленного на неподвижном элементе газотурбинного двигателя, чтобы помогать балансировать вентилятор газотурбинного двигателя. Цифровые сигналы, поступающие от датчиков скорости и ускорения, направляются в компьютер, содержащий соответствующие программы для обработки сигналов этого типа.
На практике получение вибрационного сигнала γ(t) начинается, как только тест команды на остановку газотурбинного двигателя оказывается положительным (этап Е1-1) и когда режим N2 вращения вала высокого давления становится ниже верхнего порога, определенного для периода Р измерения (этап Е1-2). Получение вибрационного сигнала γ(t) прекращается, как только режим N2 вращения вала высокого давления становится ниже заранее определенного нижнего порога (этап Е2-1).
На следующем этапе (Е3) при помощи соответствующей программы осуществляют вычисление функции f(t), которая соответствует разности между режимом N2 вращения вала высокого давления и режимом N1 вращения вала низкого давления в зависимости от времени. Эта функция f(t) предназначена для вычисления граничной частоты фильтра нижних частот, применяемого на следующем этапе, и для дискретизации сигналов.
На фиг.3 показаны диаграммы режимов N1 и N2 вращения валов низкого и высокого давления газотурбинного двигателя во время фазы его остановки. На фиг.3 показана также кривая N2-N1, соответствующая разности f(t) между этими режимами вращения.
После этого вибрационный сигнал γ(t) на этапе Е4 подают на фильтр нижних частот с граничной частотой, соответствующей f(N2-N1). Применение этого фильтра нижних частот позволяет отделить часть основных частот газотурбинного двигателя и их гармоник.
На следующем этапе (Е5) производят дискретизацию в зависимости от f(t) (то есть в зависимости от разности (N2-N1)) режимов вращения двух валов во время периода (Р) измерения следующих цифровых сигналов: предварительно отфильтрованного вибрационного сигнала γ(t), сигнала, характеризующего время, и сигналов, характеризующих режимы N1 и N2 вращения. Дискретизация позволяет выделить сигналы, разрешение которых по порядкам (N2-N1) является постоянным.
На основании такой дискретизации на следующем этапе (Е6) осуществляют преобразование (путем применения преобразующей Фурье) дискретизированного вибрационного сигнала в частотный сигнал для получения частотных спектральных линий, упорядоченных по N2-N1. Это соответствует созданию спектрограммы, показывающей вибрационные частоты, упорядоченные по N2-N1. На фиг.4 показана спектрограмма (выраженная в g пик) для газотурбинного двигателя, когда скорость вращения вала высокого давления падает от нескольких тысяч до нескольких сот оборотов/мин, режим N2.
Этапы Е5 и Е6 дискретизации сигналов и создания спектрограммы путем частотного преобразования хорошо известны специалистам, и их подробное описание опускается. Их осуществляют при помощи соответствующей вычислительной программы, загруженной в компьютер.
После этого на этапе Е7 вычисляют среднее значение амплитуд спектральных линий спектрограммы. На фиг.5 показан результат вычисления среднего значения на основании спектрограммы, показанной на фиг.4. На фиг.5 видно, что амплитудные пики соответствуют горизонтальным линиям спектрограммы. Таким образом, все, что не упорядочено по (N2-N1), ослабляется эффектом среднего значения, что позволяет выявить появление явлений, упорядоченных по N2-N1, например дефекта промежуточного подшипника качения.
На основании этого вычисления среднего значения и предварительного вычисления теоретической частоты Fтеор поврежденного ролика (этап Е7-1) на этапе Е8 определяют амплитудные пики в области кратных чисел теоретической частоты Fтеор поврежденного ролика. Такие амплитудные пики являются характерными для повреждения подшипника.
Кратные числа теоретической частоты Fтеор поврежденного ролика могут быть целыми и четными кратными числами Fтеор, как показано на фиг.5 (на фиг.5 частоты, которые являются четными кратными числами теоретической частоты Fтеор, показаны горизонтальными пунктирными линиями). В альтернативном варианте эти кратные числа могут быть нецелыми кратными числами и/или нечетными кратными числами теоретической частоты.
Для подшипника промежуточной опоры валов вычисление теоретической частоты Fтеор поврежденного ролика производят по следующей формуле:
Fтеор=(D/(2d)(N2-N1)(1-(d/D)2); где D - номинальный диаметр подшипника, d - диаметр ролика, и N1 и N2 - соответствующие скорости вращения двух валов.
В целом теоретические частоты повреждения подшипника являются функциями, которые зависят от геометрии подшипника, от числа катящихся элементов и от скорости вращения валов. Этот тип вычисления хорошо известен специалистам в данной области.
После этого вычисляют (этап Е9) соотношение R между каждым определенным амплитудным пиком и амплитудным уровнем, определенным для исправного подшипника, и это соотношение R сравнивают, по меньшей мере, с одним заранее определенным порогом повреждения (например, равным 1), чтобы определить, является ли подшипник поврежденным.
Для этого амплитудный уровень для исправного подшипника определяют на основании среднего значения, рассчитанного для разных двигателей и из разных инструментальных показаний во время испытаний. Что касается порогов повреждения, то их определяют на основании испытаний с данным поврежденным подшипником или на основании испытаний с поврежденными подшипниками, аналогичными подшипнику, для которого необходимо определить пороги.
Согласно предпочтительному отличительному признаку настоящего изобретения соотношение R между амплитудным пиком и амплитудным уровнем, определенным для исправного подшипника, сначала сравнивают с нижним порогом Sнижн повреждения (например, равным 3) на этапе Е9-1, затем, в случае необходимости, сравнивают с верхним порогом Sверх повреждения (например, равным 10) на этапе Е9-2. Если соотношение R меньше нижнего порога Sнижн, подшипник считается исправным. Если, наоборот, соотношение R превышает Sнижн, подшипник считается поврежденным. Чтобы узнать степень повреждения, соотношение R сравнивают с верхним порогом Sверх повреждения: если соотношение меньше Sверх, подшипник считается слабо поврежденным; если соотношение превышает Sверх, подшипник считается сильно поврежденным.
На фиг.6А-6С показаны результаты, полученные при помощи способа в соответствии с настоящим изобретением для поврежденного подшипника на различных этапах срока службы. Фиг.6А-6С аналогичны фиг.5 в том, что они показывают вычисление среднего значения на основании полученной спектрограммы для различных этапов срока службы промежуточного опорного подшипника газотурбинного двигателя согласно описанным выше этапам.
На фиг.6А соотношение RA между амплитудными пиками горизонтальных линий в области четных кратных чисел теоретической частоты поврежденного ролика и амплитудным уровнем, определенным для исправного подшипника, меньше нижнего порога Sнижн повреждения. Отсюда следует, что рассматриваемый подшипник можно считать исправным.
На фиг.6В соотношение RB между амплитудными пиками и амплитудным уровнем, определенным для исправного подшипника, превышает нижний порог Sнижн повреждения, но меньше верхнего порога Sверх повреждения. Поэтому подшипник считается слабо поврежденным (говорят также о поврежденном подшипнике в начале срока службы).
Наконец, на фиг.6С соотношение RC между амплитудными пиками и амплитудным уровнем, определенным для исправного подшипника, превышает нижний порог Sнижн повреждения, а также верхний порог Sверх повреждения. Следовательно, подшипник считается сильно поврежденным (говорят также о поврежденном подшипнике в конце срока службы).
Разумеется, можно предусмотреть сравнение соотношения R с числом порогов повреждения более двух, чтобы еще точнее определить степень повреждения подшипника.

Согласно изобретению предложен способ обнаружения повреждения опорного подшипника качения, на котором установлен, по меньшей мере, один вращающийся вал двигателя. В способе определяют (S1) период измерения, соответствующий интервалу режимов вращения вала во время возобновляемой работы в режиме малых оборотов двигателя, в течение всего периода измерения получают (S2) вибрационный сигнал ускорения компонентов двигателя, вибрационный сигнал дискретизируют (S3) в зависимости от режима вращения вала во время периода измерения, дискретизированный вибрационный сигнал преобразуют (S4) в частотный сигнал для получения частотных спектральных линий, упорядоченных в зависимости от режима вращения вала, вычисляют (S5) среднее значение амплитуд спектральных линий, определяют (S6) амплитудные пики в области кратных чисел теоретической частоты поврежденного ролика, вычисляют (S7) соотношение между каждым амплитудным пиком и амплитудным уровнем, определенным для исправного подшипника, и полученное соотношение сравнивают (S8), по меньшей мере, с одним заданным пороговым значением повреждения. Технический результат - повышение надежности данного способа. 4 з.п. ф-лы, 6 ил.
1. Способ обнаружения повреждения опорного подшипника качения, на котором установлен, по меньшей мере, один вращающийся вал двигателя, отличающийся тем, что
а) определяют (S1) период измерения, соответствующий интервалу режимов вращения вала во время возобновляемой работы в режиме малых оборотов двигателя,
б) в течение всего периода измерения получают (S2) вибрационный сигнал ускорения элементов двигателя,
в) вибрационный сигнал дискретизируют (S3) в зависимости от режима вращения вала во время периода измерения,
г) дискретизированный вибрационный сигнал преобразуют (S4) в частотный сигнал для получения частотных спектральных линий, упорядоченных в зависимости от режима вращения вала,
д) вычисляют (S5) среднее значение амплитуд спектральных линий,
е) определяют (S6) амплитудные пики в области кратных чисел теоретической частоты поврежденного ролика,
ж) вычисляют (S7) соотношение между каждым амплитудным пиком и амплитудным уровнем, определенным для исправного подшипника,
з) полученное соотношение сравнивают (S8), по меньшей мере, с одним заранее определенным пороговым значением повреждения.
2. Способ по п.1, отличающийся тем, что на этапе з) полученное соотношение сравнивают (S8) с нижним порогом повреждения и, если соотношение превышает нижний порог, его сравнивают с верхним порогом повреждения, чтобы определить степень возможного повреждения подшипника.
3. Способ по любому из пп.1 и 2, отличающийся тем, что возобновляемая работа в режиме малых оборотов двигателя, которую выбирают для определения периода измерения, соответствует фазе запуска или фазе остановки двигателя.
4. Способ по п.1, отличающийся тем, что на опоре с подшипником качения установлены два вращающихся вала двигателя, при этом
период измерения соответствует интервалу режимов вращения одного из валов во время работы двигателя на малых оборотах; и
вибрационный сигнал дискретизируют в зависимости от разности режимов вращения обоих валов во время периода измерения.
5. Способ по п.1, отличающийся тем, что на этапе е) определяют амплитудные пики в области целых и четных кратных чисел теоретической частоты поврежденного ролика.
| ЕР 1111364 А, 27.06.2001 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| DE 19702234 А1, 06.08.1998 | |||
| US 5511422 A, 30.04.1996 | |||
| СПОСОБ КОМПЛЕКСНОЙ ВИБРОДИАГНОСТИКИ ПОДШИПНИКОВ КАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2104510C1 |
| СПОСОБ ДИАГНОСТИКИ ПОДШИПНИКОВ | 2001 |
|
RU2209410C1 |

