ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области управления расходом текучей среды в газотурбинном двигателе. Более конкретно оно относится к контролю состояния вентиля, работающего по принципу - все или ничего, в одном из контуров газов газотурбинного двигателя.
УРОВЕНЬ ТЕХНИКИ
Вентили, работающие по принципу - все или ничего, применяют в газотурбинных двигателях, например на входе компрессора высокого давления, чтобы его разгружать в некоторых случаях работы двигателя, или в реактивных трубах с использованием воздуха, поступающего из первичного потока, для контроля разрежения масляных камер смазки опорных подшипников и коробок приводов агрегатов газотурбинного двигателя (обеспечивая таким образом герметичность этих камер).
С учетом стоимости или окружающих условий некоторые из этих вентилей невозможно контролировать при помощи датчика обратной связи по положению. Вместе с тем, очень важно отслеживать состояние этих вентилей, в частности, чтобы изолировать предназначенное для замены устройство в случае неисправности. Кроме того, при блокировке вентиля в открытом или закрытом положении эти неисправности могут быть скрытыми до появления рабочего эффекта.
Например, неисправность разгрузочного вентиля, находящегося на входе компрессора, может привести к таким явлениям в двигателе, как помпаж или срыв работы. Чем новее двигатель, тем больше у него запас помпажа и тем больше он может выдерживать такую неисправность. Следовательно, нельзя с уверенностью сказать, что неисправность на вентиле такого типа автоматически повлияет на работу. С другой стороны, это явление скрытой неисправности приводит к преждевременному износу двигателя и может в конечном итоге стать причиной его поломки. Аналогичные эффекты скрытых неисправностей можно наблюдать, например, в контуре разрежения масляных камер.
Следовательно, необходимо контролировать вентиль во время работы газотурбинного двигателя, чтобы определить, следует ли его заменить или нет в ходе обслуживания. Кроме того, в случае отслеживаемого явления в двигателе (например, помпажа) это позволяет ориентировать оператора по обслуживанию путем выявления неисправного вентиля и, следовательно, сократить время работы при обслуживании.
Известны способы, предназначенные для проверки действительного переключения таких вентилей путем наблюдения изменения переменной состояния двигателя, чувствительной к состоянию вентиля, даже в отсутствие последствий для работы. Например, в документе ЕР1978223 предложено отслеживать температуру выходных газов двигателя после подачи команды на разгрузочный вентиль. В другом примере, описанном в ЕР1926009 и относящемся к разгрузочному вентилю, предложено наблюдать изменение выходного давления компрессора.
В решениях, описанных в указанных документах, прежде всего применяют методы фильтрации, которые позволяют устранить часть шума и выделить характеристические явления. В этих методах сигнатура переключения разгрузочного вентиля имеет вид четко выраженного пика на сигнале. Однако на практике работа двигателя редко стабилизируется, например изменение режима двигателя или срабатывание другого агрегата может привести к изменению наблюдаемой переменной. Чтобы исключить влияние окружающей среды, в вышеуказанных методах порог обнаружения пика адаптируют к рабочим условиям или блокируют обнаружение в случае паразитных явлений, таких как срабатывание другого вентиля.
Однако чтобы избегать, в частности, обнаружения ложных неисправностей на вентилях, которые могли бы повлечь за собой бесполезную операцию обслуживания, известные методы наталкиваются на трудности. С одной стороны, не всегда можно учитывать все явления окружающей среды, так как не всегда имеются в наличии относящиеся к ним данные. Кроме того, даже адаптируя порог в зависимости от окружающей среды, влияние или скорее даже отсутствие влияния команды переключения трудно идентифицировать в общем сигнале.
Изобретение призвано предложить средство, позволяющее преодолевать встречающиеся трудности и более надежно идентифицировать влияние нарушения в переключении вентиля на изменение соответствующего параметра газотурбинного двигателя, исключая возмущения, связанные с изменениями окружающей среды. В частности, изобретение должно позволить избегать обнаружения ложных неисправностей и одновременно обеспечивать подготовку замены контролируемого вентиля, когда в этом возникает необходимость.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В связи с этим изобретением предложен способ контроля вентиля в газотурбинном двигателе, при этом упомянутый вентиль производит переключение путем закрывания и/или открывания в ответ на команду, переданную в определенный момент, при этом упомянутый способ содержит этап вычисления первой формы временного сигнала на основании изменения переменной состояния упомянутого газотурбинного двигателя, реагирующей на переключение упомянутого вентиля, затем этап применения теста сигнатуры переключения вентиля к второй форме упомянутого сигнала, вычисленной на основании первой формы. Упомянутый способ отличается тем, что дополнительно содержит этап, на котором определяют интервал времени после передачи упомянутой команды для осуществления упомянутого теста сигнатуры и тем, что поскольку изменение одного или нескольких других параметров, отличных от переключения, известно и изменение упомянутого временного сигнала в ответ на изменение упомянутого или упомянутых других параметров можно вычислить, упомянутый способ содержит так называемый этап десенсибилизации, на котором упомянутую вторую форму сигнала вычисляют на основании первой формы сигнала, вычитая из нее изменение сигнала, вычисленное на основании изменения упомянутого или упомянутых других параметров за упомянутый интервал времени после команды.
Определение интервала времени после передачи команды позволяет сконцентрировать контроль вентиля на части сигнала, соответствующей ожидаемым эффектам переключения после команды. Соответственно целью способ может быть выявление сигнала, согласованного с управлением вентиля за этот интервал времени, чтобы не учитывать внешние явления, когда применяют тест сигнатуры переключения вентиля. Этот признак позволяет избегать подачи тревожных сигналов обнаружения неисправности, которые привели бы к бесполезной операции обслуживания, когда вентиль продолжает работать.
Так называемый этап десенсибилизации позволяет получить боле характерную сигнатуру переключения вентиля. В некоторых случаях это позволяет не параметрировать тест сигнатуры в зависимости от условий использования газотурбинного двигателя в момент переключения вентиля.
Как правило, упомянутый сигнал отображает временную производную упомянутой переменной состояния предпочтительно в фильтрованном виде. Действительно, изменения этой производной похожи на строб-импульс, который охарактеризовать легче, чем изменения переменной состояния, которые могут быть скрыты переходным изменением.
В частности, упомянутая переменная состояния может быть давлением газов в контуре газотурбинного двигателя. Сигнатура работы вентиля может соответствовать тесту прохождения сигнала через пик значения, который должен переходить определенный порог в положительном или отрицательном направлении. Между подачей команды переключения вентиля и упомянутым интервалом времени можно предусмотреть определенный промежуток времени. Это позволяет учитывать время реакции установки на переключение вентиля.
Предпочтительно упомянутый способ содержит тест на этапе определения интервала времени, чтобы не запускать последующие этапы, если две противоположные команды переключения вентиля следуют друг за другом в определенном промежутке времени. Это позволяет избегать ложных измерений, когда вентиль остается неподвижным по причине своего времени реакции на команду.
В частности, в первом варианте способ может определять упомянутую вторую форму сигнала как упомянутую первую форму сигнала после этапа десенсибилизации.
Во втором варианте способ дополнительно содержит этап, на котором идентифицируют подтвержденную неисправность, если на этапе применения теста сигнатуры было отмечено отсутствие ответа для серии из n последовательных команд, включая текущую команду, при этом n превышает или равно двум, в противном случае идентифицируют отсутствие подтвержденной неисправности.
Этот второй вариант позволяет учитывать случайное наступление событий, искажающих измерение переменной, на основании которой создают тестируемый сигнал. В рамках этого варианта предпочитают продолжать использовать газотурбинный двигатель, если нет уверенности в наступлении неисправности, а не производить обнаружение неисправности, поскольку она наверняка может быть обнаружена во время следующего цикла контроля, если такой предусмотрен. Число n, равное двум, если решают, что одного повторения отсутствия сигнала для двух последовательных команд достаточно, чтобы подтвердить неисправность, можно корректировать в зависимости от вероятности наступления немоделируемых событий.
Предпочтительно такой способ содержит этап сохранения в памяти результата применения теста сигнатуры. Это позволяет, в частности, обратиться к этой памяти после операции, чтобы узнать хронологию работы вентиля.
Такой способ можно применять для установки, в которой упомянутый вентиль является вентилем питания реактивной трубы, используемой для создания разрежения по меньшей мере в одной масляной камере газотурбинного двигателя. В этом случае переменной состояния является давление в контуре питания маслом упомянутой камеры, и способ использует этап десенсибилизации, при этом другим параметром, влияющим на упомянутый сигнал, является скорость вращения газотурбинного двигателя.
Согласно второму варианту осуществления изобретения предложен способ контроля вентиля в газотурбинном двигателе, при этом упомянутый вентиль производит переключение путем закрывания и/или открывания в ответ на команду, переданную в определенный момент, при этом упомянутый способ содержит этап вычисления первой формы временного сигнала на основании изменения переменной состояния упомянутого газотурбинного двигателя, реагирующей на переключение упомянутого вентиля, затем этап применения теста сигнатуры переключения вентиля к второй форме упомянутого сигнала, вычисленной на основании первой формы. Упомянутый способ отличается тем, что дополнительно содержит этап, на котором определяют интервал времени после передачи упомянутой команды для осуществления упомянутого теста сигнатуры, и тем, что упомянутый способ содержит этап, на котором идентифицируют подтвержденную неисправность, если было отмечено отсутствие ответа во время этапа применения теста сигнатуры для серии из n последовательных команд, включая текущую команду, при этом n превышает или равно двум, в противном случае идентифицируют отсутствие подтвержденной неисправности.
Предпочтительно вторая форма сигнала равна первой форме сигнала.
Если изменение одного или нескольких других параметров, отличных от переключения вентиля, известно и если можно вычислить изменение упомянутого временного сигнала в ответ на изменение упомянутого или упомянутых других параметров, упомянутый способ может содержать так называемый этап десенсибилизации, на котором упомянутую вторую форму сигнала вычисляют на основании первой формы сигнала, вычитая из нее изменение сигнала, вычисленное на основании изменения упомянутого или упомянутых других параметров за упомянутый интервал времени после команды.
Этот второй вариант осуществления позволяет учитывать случайное наступление событий, искажающих измерение переменной, на основании которой создают тестируемый сигнал. В рамках этого варианта предпочитают продолжать использовать газотурбинный двигатель, если нет уверенности в наступлении неисправности, а не производить обнаружение неисправности, поскольку она наверняка может быть обнаружена во время следующего цикла контроля, если такой предусмотрен. Число n, равное двум, если решают, что одного повторения отсутствия сигнала для двух последовательных команд достаточно, чтобы подтвердить неисправность, можно корректировать в зависимости от вероятности наступления немоделируемых событий.
Определение интервала времени после передачи команды является таким же, как и в предыдущем варианте осуществления.
Точно так же во втором варианте осуществления:
- упомянутый сигнал может отображать временную производную упомянутой переменной состояния, предпочтительно в фильтрованном виде,
- упомянутая переменная состояния может быть давлением газов в контуре газотурбинного двигателя,
- сигнатура работы вентиля может соответствовать тесту прохождения сигнала через пик значения, который должен переходить определенный порог в положительном или отрицательном направлении,
- между подачей команды переключения вентиля и упомянутым интервалом времени можно предусмотреть определенный промежуток времени, и
- упомянутый способ может содержать тест на этапе определения интервала времени, чтобы не запускать последующие этапы, если две противоположные команды переключения вентиля следуют друг за другом в определенном промежутке времени.
Предпочтительно такой способ содержит этап сохранения в памяти результата применения теста сигнатуры. Это позволяет, в частности, обратиться к этой памяти после операции, чтобы узнать хронологию работы вентиля.
Заявленный способ можно также применять для контроля работы разгрузочного вентиля, расположенного в потоке, проходящем через компрессор газотурбинного двигателя. В этом случае способ использует второй вариант осуществления, при этом переменной состояния является давление, измеряемое в потоке, проходящем через упомянутый компрессор, и переключение, соответствующее подаче команды на упомянутый вентиль, является закрыванием.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Настоящее изобретение и его другие детали, отличительные признаки и преимущества будут более понятны из нижеследующего описания со ссылками на прилагаемые чертежи, на которых:
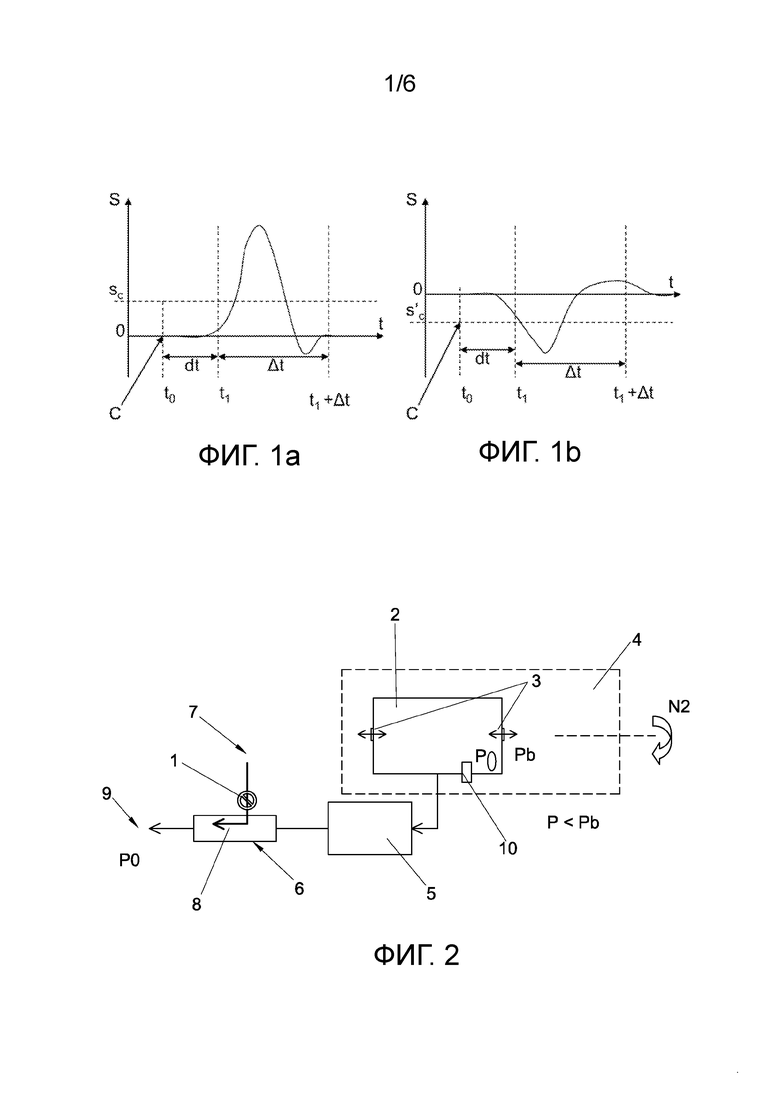
Фиг. 1а - изменение во времени функции переменной двигателя во время закрывания вентиля.
Фиг. 1b - изменение во времени функции переменной двигателя во время открывания вентиля.
Фиг. 2 - схема первого примера установки, содержащей вентиль, работу которого необходимо контролировать.
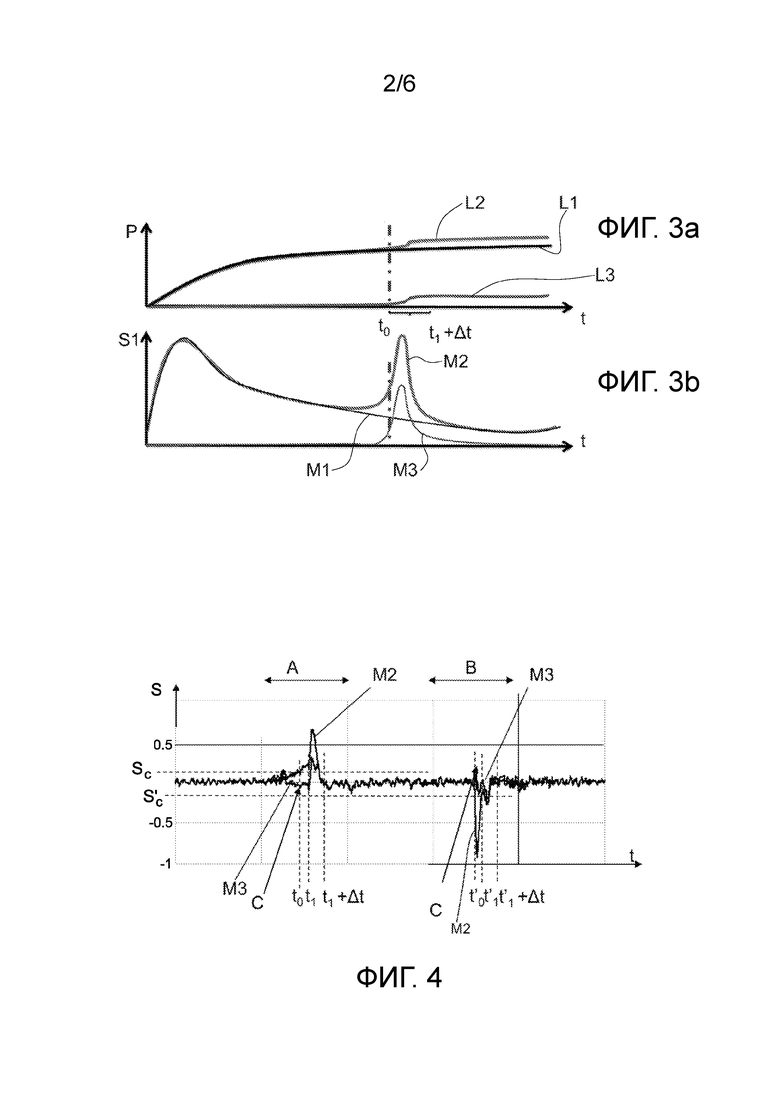
Фиг. 3а и 3b схематично иллюстрируют принцип устранения влияния некоторых параметров для контроля работы вентиля путем наблюдения изменения давления и его временной производной.
Фиг. 4 - результат применения принципа, представленного на фиг. 3а и 3b, для работы установки, показанной на фиг. 2.
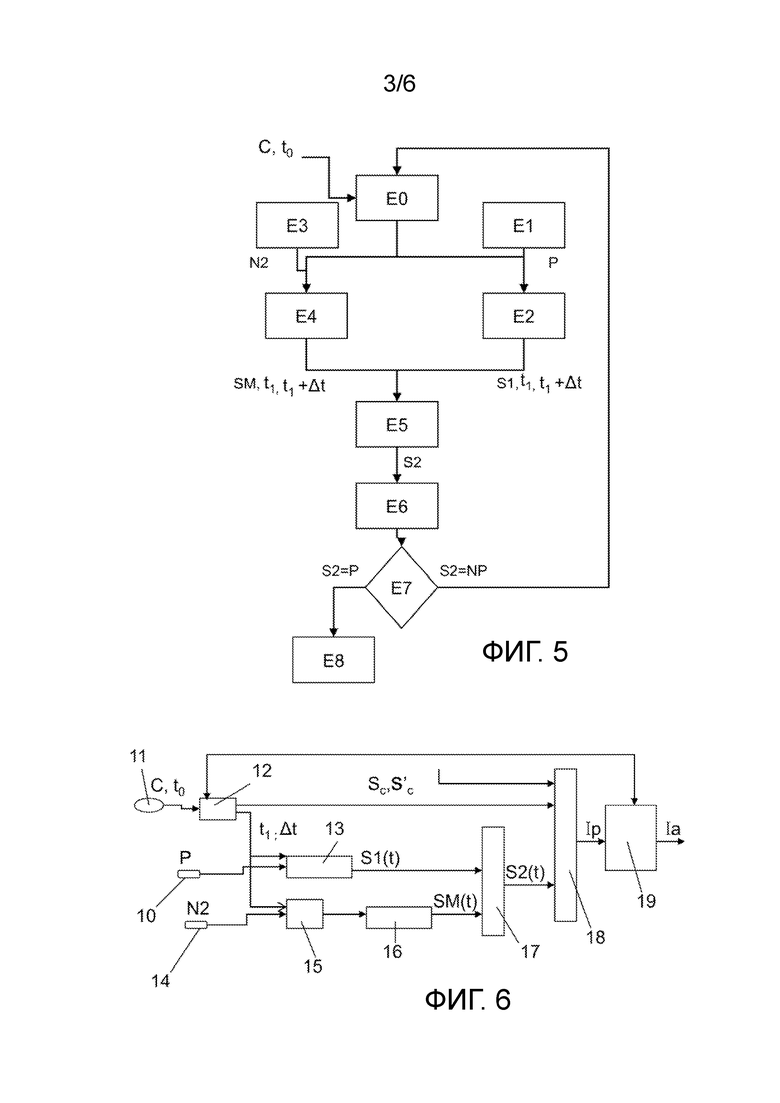
Фиг. 5 - первый вариант осуществления заявленного способа, применяемый для установки, показанной на фиг. 2.
Фиг. 6 - функциональная схема устройства, в котором осуществляют первый вариант заявленного способа, в установке, показанной на фиг. 2.
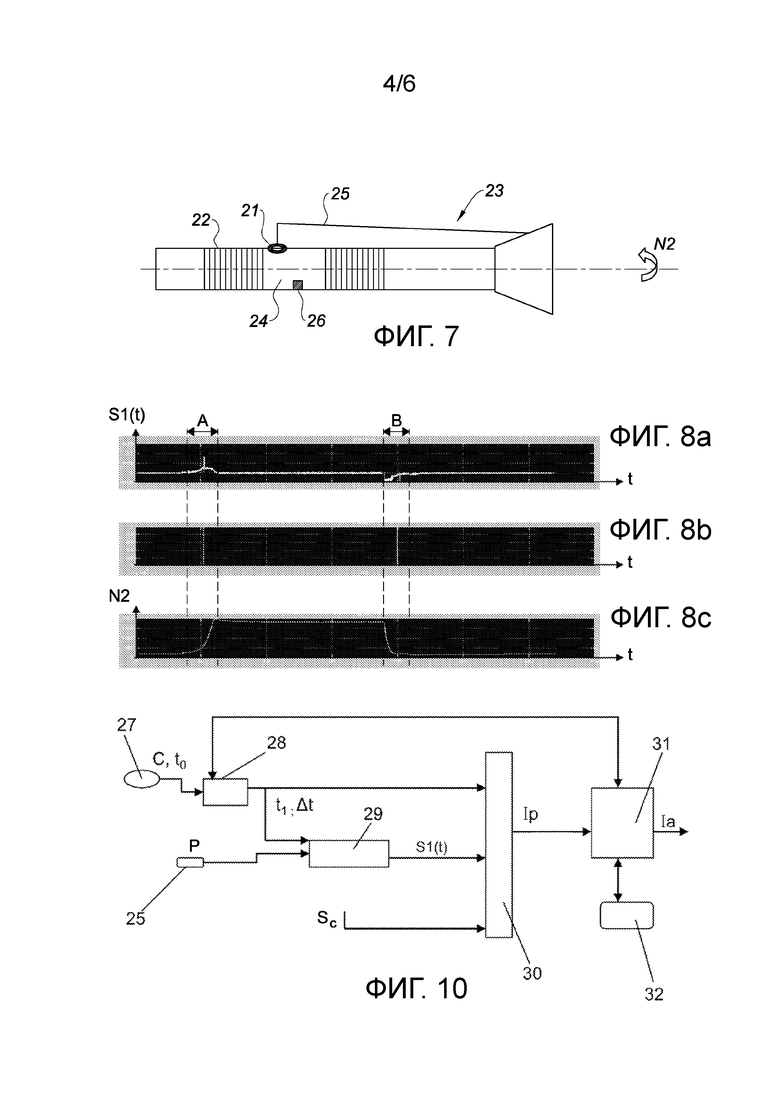
Фиг. 7 - схема второго примера установки, содержащей вентиль, работу которого необходимо контролировать.
Фиг. 8а-8с - изменение переменной давления в установке в ответ на работу вентиля в разных условиях окружающей среды.
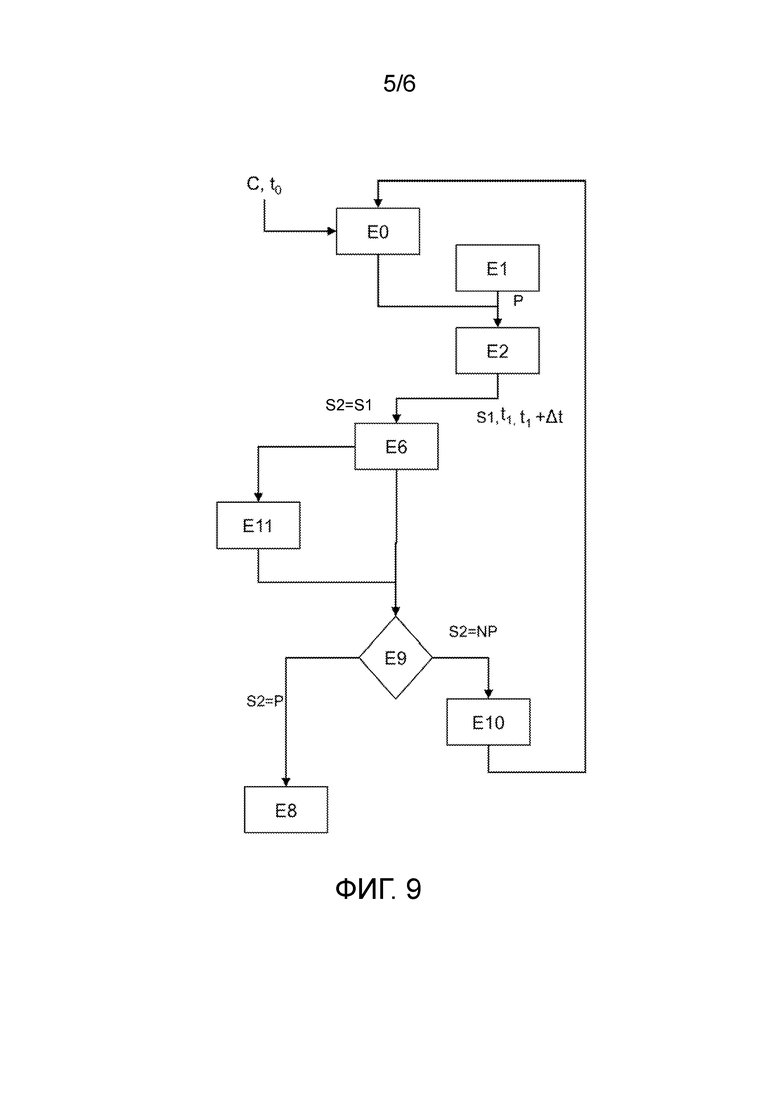
Фиг. 9 - второй вариант осуществления заявленного способа, применяемый для установки, показанной на фиг. 7.
Фиг. 10 - функциональная схема устройства, в котором осуществляют второй вариант заявленного способа, в установке, показанной на фиг. 7.
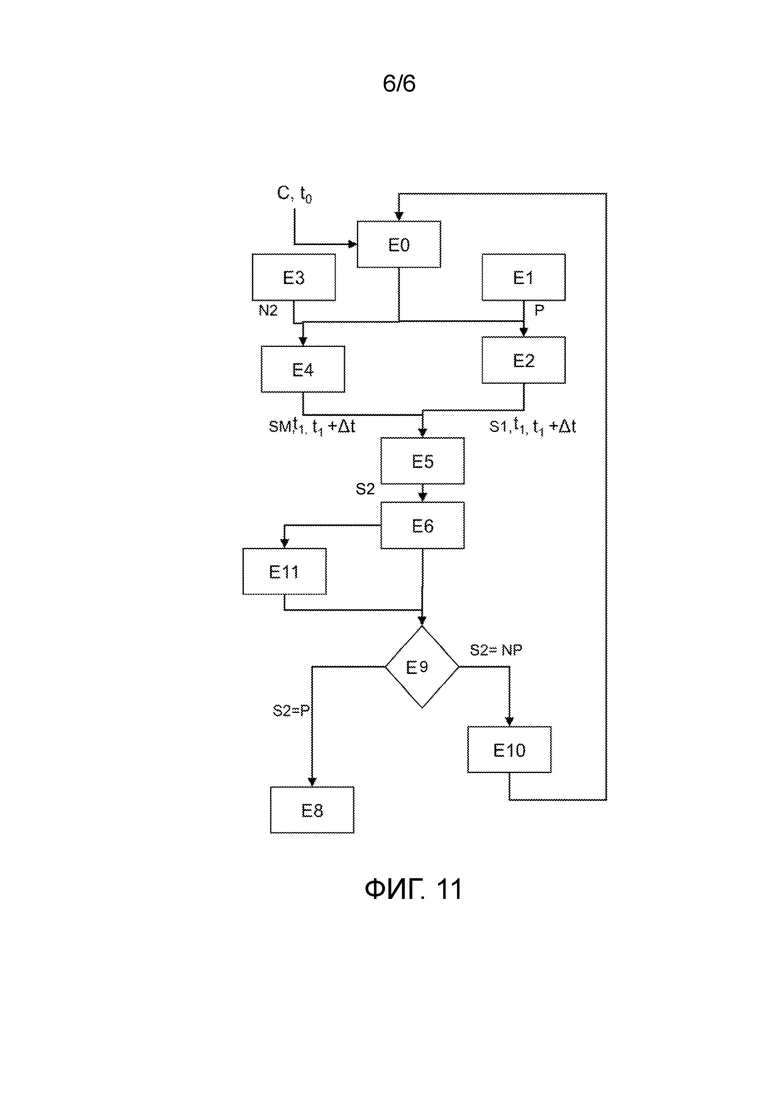
Фиг. 11 - версия осуществления, в котором комбинируют представленные первый и второй варианты осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Как показано на фиг. 1а и 1b, изобретение относится к способу, использующему тест на сигнале S, связанном с изменением переменной V состояния двигателя во время изменения состояния контролируемого вентиля. При этом тест соответствует идентификации сигнатуры, характеризующей изменение сигнала S в зависимости от времени t после подачи команды С на переключение вентиля.
Переменной V может быть, например, давление газов, измеряемое в месте контура двигателя, содержащем вентиль, и сигнал S может отображать временную производную dvd/ddt изменения этой переменной. Как правило, сигнал S отображает нормализованную временную производную (dVd/ddt)/V переменной состояния, то есть поделенную на значение переменной для получения относительных значений.
На фиг. 1а двигатель находится в устоявшемся режиме перед подачей команды С на закрывание вентиля в момент t0. Таким образом, давление является постоянным, и сигнал S(t) является нулевым. В рассматриваемом примере вентиль перекрывает выход контура и, следовательно, его закрывание приводит к повышению давления, которое стабилизируется в другом значении.
С учетом времени реакции всей системы изменение сигнала S(t) является особенно существенным после промежутка времени ddt за интервал времени [t1, t1+Δt], где t1=t0+dt. В интервале [t1,t1+Δt] сигнатура закрывания вентиля соответствует положительному пику на сигнале S(t), который систематически проходит под пороговым значением Sc, когда вентиль закрывается, причем этот порог Sc в достаточной степени удален от нуля, чтобы избегать его достижения, когда вентиль не переключается.
В рассматриваемом примере тест, используемый в рамках способа, соответствует запуску наблюдения сигнала S(t) в интервале времени [t1,t1+Δt] после подачи команды С переключения вентиля в момент t0, затем проверке присутствия или отсутствия сигнатуры действительного переключения вентиля на сигнале S(t) путем проверки его прохождения через порог Sc за интервал времени [t1, t1+Δt].
Переключение вентиля при открывании тоже может иметь особенную сигнатуру. На фиг. 1b представлен случай, когда открывание вентиля приводит к понижению давления относительно устоявшегося режима. Симметрично относительно предыдущего случая сигнал S(t) проходит в интервале времени [t1,t1+Δt] через отрицательный пик, проходящий через порог Sʹc. Тест, применяемый в рамках способа, позволяет контролировать прохождение этого порога Sʹc в течение интервала времени [t1,t1+Δt].
Тест был представлен для случая, когда переменной является давление, но можно также использовать другие характеристические переменные двигателя, чтобы создавать сигнал S(t) в зависимости от функций, выполняемых контролируемым вентилем. Например, речь может идти о температуре газов на выходе генератора первичного газа.
Кроме того, изобретение учитывает искажения по отношению в представленному выше упрощенному случаю. Действительно, двигатель может менять режим, и внешние явления могут нарушать изменение переменной, при помощи которой отслеживают состояние вентиля.
Далее описано, каким образом изобретение позволяет повысить надежность обнаружения неисправности при помощи предыдущего теста, на двух примерах с использованием давления в качестве переменной, характеризующей состояние контролируемого вентиля.
Первый вариант осуществления
Первый пример осуществления изобретения соответствует контролю вентиля 1 разрежения масляных камер 2 двигателя 4.
Фиг. 2 иллюстрирует признаки установки, в которой работает вентиль 1. Герметичность соединений 3 масляных камер 2 обеспечивается за счет отрицательной разности давления (P-Pb) на соединениях 3 относительно остальной части двигателя 4. В некоторых режимах эту разность давления необходимо обеспечивать за счет принудительного разрежения. Масляный контур содержит по меньшей мере одну камеру 2, в которой над маслом находится воздух. В этом случае разрежение создают при помощи воздушной системы следующим образом:
- воздух всасывается через реактивную трубу 6, которая предназначена для создания разрежения в камерах 3;
- контур, соединяющий реактивную трубу 6 с камерами 2, обычно содержит маслоотделитель 5 для очистки от масла воздуха, поступающего в камеры;
- воздух под давлением, поступающий из первичного потока 7 в двигателе 4, нагнетают в реактивную трубу 6 через два патрубка 8 для создания явления всасывания;
- воздух удаляется во вторичный поток 9 двигателя 4.
Это разрежение следует регулировать в зависимости от условий полета. Например, на небольшой высоте полета или при запуске необходимо обеспечивать сильное всасывание для разрежения в камерах 3 и для обеспечения герметичности соединений 3, как было указано выше. С другой стороны, в частности, на большой высоте полета, поскольку давление Р в камерах 2 зависит от атмосферного давления Р0, потребность в разрежении является меньшей. Кроме того, камеры 2 получают питание маслом при помощи рекуперационных насосов, которые могут отключиться, если разрежение является слишком сильным.
Контролируемый вентиль 1 управляет нагнетанием первичного воздуха 7 в реактивную трубу 6, открывая или перекрывая один из патрубков 8.
При этом возможны две конфигурации:
- вентиль 1 управления закрыт, первичный воздух 7 проходит только через один патрубок 8, и разрежение масляных камер 2 является слабым;
- вентиль 1 открыт, первичный воздух 7 проходит через оба патрубка 8, и разрежение масляных камер 2 является сильным.
Вентиль 1, заблокированный в открытом положении, может на большой высоте привести к отключению рекуперационных насосов и к остановке двигателя 4. Вместе с тем эта неисправность не будет иметь последствий ниже определенной высоты полета и, следовательно, в этих условиях будет скрытой.
Вентиль 1, заблокированный в закрытом положении, вызовет лишь слабую потерю герметичности на уровне соединений 3, и эту неисправность трудно обнаружить по уровню масла. Таким образом, в течение некоторого времени эта неисправность тоже будет оставаться скрытой.
Для обнаружения этих неисправностей заявленный способ применяет описанный выше тест к сигналу S(t), полученному на основании измерения давления Р(t) масла в камерах 2, в течение интервала времени [t1,t1+Δt] после команды С переключения вентилем 1 патрубков 8 реактивной трубы 6. Как и в случае, представленном на фиг. 1а и 1b, сигнал S(t), соответствующий нормализованной временной производной давления Р(t), имеет пик, проходящий через положительный порог Sc во время закрывания вентиля 1 и проходящий через отрицательный порог Sʹc во время его открывания. Цифровые значения порогов Sc, Sʹc, а также промежутки времени dt и Δt корректируют в зависимости от физических характеристик установки, описанной со ссылками на фиг. 2.
Как показано на фиг. 5, способ содержит первоначальный этап Е0, на котором регистрируют подачу команды С переключения вентиля 1 в момент t0. Параллельно на первом этапе Е1 измеряют давление Р(t) при помощи датчика 10 в масляных камерах 2. Этап Е1 можно объединить с этапом Е0, чтобы начинать измерения только при подаче команды С.
Затем способ содержит этап Е2, на котором получают первую форму S1(t) сигнала S(t) за интервал времени [t1,t1+Δt]. Этот этап Е2 может содержать несколько подэтапов. Действительно, этап Е2 включает в себя вычисление нормализованной временной производной S(t) давления Р(t) на основании измерений. При этом вычислении речь идет об устранении погрешностей, связанных с дискретизацией измерения при помощи датчика 10, и об устранении возмущений, создающих паразитные колебания, в частности, на временной производной. Таким образом, на этом этапе специалист в данной области может использовать определенное количество методов фильтрации, которые необходимы для способа, но не входят в объем изобретения.
Однако обнаружение неисправности, основанное на тесте, описанном со ссылками на фиг. 1а и 1b, в применении к сигналу S1(t), полученному непосредственно на основании измерения давления Р в масляных камерах 2, не является надежным. Действительно, влияние других параметров может помешать обнаружению. На рассматриваемой установке на быстрые изменения давления в камерах 2 существенное влияние оказывает только режим двигателя 4. Сильное ускорение или сильное замедление скорости вращения двигателя 4 приводит к сильному изменению давления Р, которое может скрыть влияние движения вентиля 1 на сигнал S(t) на выходе этапа Е2.
Скорость вращения N2 двигателя 4 можно легко измерить и ее влияние на давление Р(t) и, следовательно, на сигнал S1(t) можно смоделировать. Таким образом, чтобы найти сигнатуру переключения вентиля 1 в сигнале S1(t), к нему можно применить так называемый метод десенсибилизации, принцип которого представлен на фиг. 3а и 3b.
Как показано на фиг. 3а, повышение скорости N2 приводит, например, к изменению положительного давления Р, показанного в виде кривой L1. Если вентиль 1 закрыть в момент t0, это приведет к резкому скачку давления, но со слабой амплитудой по сравнению с изменениями давления в фазе ускорения, как показано на кривой L2. Это явление оказывается усиленным, если рассмотреть представленные на фиг. 3b изменения сигнала S1(t) на выходе этапа Е2, соответствующие нормализованной производной dP/P и показанные в виде кривых М1 и М2, соответствующих кривым L1 и L2. Сначала пик значения, наблюдаемый на кривой М2 в начале ускорения, подобен пику, наблюдаемому в момент t0 закрывания вентиля 1, и даже может быть еще большим. Таким образом, тест порога может привести к схожести между ускорением и закрыванием вентиля 1. С другой стороны, интенсивность пика на М2 за интервал времени [t1,t1+Δt] после момента t0 закрывания вентиля 1 зависит от окружающей среды.
Если известна скорость вращения N2, метод десенсибилизации состоит в воспроизведении путем моделирования сигнала SМ(t), соответствующего кривой М1, затем в вычитании моделированного сигнала SМ(t) из сигнала S1(t), полученного на этапе Е2 и соответствующего кривой М2. Таким образом, получают кривую М3, показанную на фиг. 3b. Аналогичную операцию можно осуществить для давления Р(t), чтобы получить кривую L3. Однако результат особенно проявляется на кривой М3, отображающей нормализованную и десенсибилизированную производную давления. Действительно, пик значения, связанный с началом ускорения, исчез.
Кроме того, нормализация сигналов, то есть использование временной производной измеренной величины, поделенной на значение этой величины, для давления Р и скорости вращения N2 позволяет получить изменение в процентном выражении и, в частности, устранить относительные эффекты на уровне давления Р, при котором получают кривые L1 или L2, в момент закрывания вентиля 1. Это позволяет проще определить при тесте пороговое значение Sс, Sʹc, независимо от условий работы двигателя 4.
Заявленный способ содержит также этап Е3 считывания скорости вращения N2(t) двигателя 4 в течение времени. Затем на этапе Е4, используя временное изменение N2(t) этой скорости вращения и информацию, полученную на этапе Е0, о передаче команды С закрывания или открывания вентиля 1 в момент t0 можно при помощи модели реконструировать сигнал SМ(t), который мог бы быть получен за интервал времени [t1,t1+Δt] без переключения вентиля 1. Предпочтительно на этом этапе Е4 применяют методы фильтрации, аналогичные методам, используемым на этапе Е2, для воспроизведения нормализованной производной параметра на основании дискретизации этого параметра в течение времени.
Затем способ содержит так называемый этап Е5 десенсибилизации, на котором получают вторую форму S2(t) сигнала производной давления, вычитая в интервале [t1,t1+Δt] сигнал SМ(t) из первой формы сигнала S1(t), полученной на выходе этапа Е2. Можно также сказать, что форма сигнала S2(t) согласуется с движениями вентиля 1, тогда как предыдущая форма сигнала S1(t) содержит паразитные данные.
На фиг. 4 представлены результаты, полученные при помощи этого способа, для случая работы установки, описанной со ссылками на фиг. 2, где в течение первого интервала времени А ускорение скорости вращения N2 накладывается на закрывание вентиля 1, и в течение второго интервала времени В замедление N2 накладывается на открывание вентиля 1.
Аналогично тому, что было описано со ссылками на фиг. 3b, кривая М2 на фиг. 4 отображает изменение первой формы сигнала S1(t) на выходе этапа Е2, и кривая М3 отображает изменение второй, десенсибилизированной формы сигнала S2(t), полученной на выходе этапа Е5 в течение интервалов времени [t1,t1+Δt] после подачи команды С на вентиль 1. Отмечается, что пик, связанный с ускорением, скорректирован на сигнале S2(t), и остается только пик, связанный с движением вентиля 1. Это замечание относится также к фазе замедления по В во время интервала [tʹ1,tʹ1+Δt] в момент tʹ0.
На выходе этапа Е5 способ содержит этап Е6, на котором применяют тест сигнатуры, описанный со ссылками на фиг. 1а и 1b, к второй форме сигнала S2(t). Как показано на фиг. 4, на этапе Е6 можно использовать разный порог Sс или Sʹc в зависимости от команды С, передаваемой на вентиль 1 и соответствующей закрыванию или открыванию.
На следующем этапе Е7 определяют, что вторая форма сигнала S2(t) действительно отображает ответ системы на изменение состояния вентиля 1. Следовательно, если тест сигнатуры выявляет изменение состояния вентиля 1, этап Е7 позволяет сделать из этого вывод, что вентиль 1 работает нормально (S2=NP), и можно опять начать способ с этапа Е0 для контроля вентиля во время подачи следующей команды С на переключение.
Если тест сигнатуры не выявляет изменения состояния вентиля 1, на этапе Е7 делают вывод о наличии неисправности (S2=P) вентиля 1, и способ переходит на этап Е8, на котором получают информацию о неисправности в соответствующем виде.
Как показано на фиг. 6, система обнаружения неисправности, выполненная с возможностью осуществления способа, содержит электронную схему и датчики.
Первая ветвь схемы соединена с системой 11 управления переключением вентиля 1 и содержит часовой модуль 12, который обнаруживает команду С закрывания или открывания вентиля в момент t0 и который определяет границы интервала времени [t1,t1+Δt], используемого для теста сигнатуры.
Вторая ветвь электронной схемы соединена с датчиком 10 давления в масляных камерах 2 и содержит модуль 13, выполненный с возможностью фильтровать и дифференцировать сигнал Р(t) датчика 10. Этот модуль 13, соединенный с часовым модулем 12, выдает на выходе форму сигнала S1(t) за интервал времени [t1,t1+Δt].
Третья ветвь электронной схемы соединена с датчиком 14 скорости вращения N2(t) вала двигателя 4. Она содержит модуль 15, выполненный с возможностью фильтровать и дифференцировать сигнал N2(t) датчика 14 для получения нормализованного сигнала на основании сигнала, выдаваемого датчиком 14. Затем этот результат используется модулем 16 моделирования, который выдает сигнал SМ(t), моделирующий реакцию установки в отсутствие движения вентиля 1. Одним из вариантов реализации этого модуля 16 моделирования является применение предварительно составленных таблиц с задержками для учета времени установления давления между масляными камерами 2.
Модуль 17, вычисляющий разность, вычитает сигнал SМ(t), поступающий из модуля 16 моделирования, из сигнала S1(t).
Тестовый модуль 18, получающий сигнал S2(t) на выходе модуля 17 вычисления разности, соединенный с часовым модулем 12 и параметризованный в зависимости от выбранных порогов Sс, Sʹc, осуществляет тест сигнатуры за интервал времени [t1,t1+Δt] после подачи команды С на вентиль 1 и передает логический результат Ip о неисправности или о работе в модуль 19 контроля, который управляет ходом способа и передачей тревожных сигналов Ia.
Второй вариант осуществления
Второй пример осуществления изобретения соответствует контролю разгрузочного вентиля 21, позволяющего разгружать компрессор 22 высокого давления в некоторых случаях работы двигателя 23.
Как показано на фиг. 7, в рассматриваемом примере этот вентиль 21 находится в проточном тракте 24 первичного потока на выходе осевого компрессора 22 высокого давления, как правило, на входе не показанного на фигуре центробежного компрессора перед следующими ступенями двигателя. При открывании этот вентиль 21 сообщается с каналом 25, который отводит часть первичного потока, как правило, в направлении вторичного потока. В зависимости от положения разгрузочных вентилей 21 можно увеличить запас помпажа или улучшить удельный расход топлива.
Чаще всего каждый из этих разгрузочных вентилей 21 управляется по принципу - все или ничего, и, учитывая ситуацию в очень горячей окружающей среде, он, как правило, не снабжен средством измерения положения.
Однако как было упомянуто во вступительной части, очень важно знать рабочее состояние каждого из разгрузочных вентилей 21, так как в некоторых случаях неисправность может оставаться скрытой. Следовательно, обнаружение неисправности позволяет вмешаться, прежде чем неисправность скажется на состоянии двигателя 23.
Открывание или закрывание разгрузочного вентиля 21 на входе компрессора 22 выражается изменением давления Р на выходе компрессора 22. Датчик 26 давления, как правило, установленный на выходе компрессора 22 сразу за разгрузочным вентилем 21, регистрирует резкие изменения уровня давления Р во время открывания или закрывания вентиля 21.
Таким образом, как и в первом варианте осуществления, заявленный способ начинается с определения первой формы сигнала S1(t), соответствующей нормализованной временной производной давления Р, измеренного датчиком 26, в интервале времени [t1,t1+Δt] после момента t0 подачи команды С на вентиль 21.
Таким образом, как показано на фиг. 9, способ тоже содержит первоначальный этап Е0, на котором регистрируют подачу команды С переключения вентиля 21 в момент t0. Параллельно на первом этапе Е1 измеряют давление Р(t) при помощи датчика 26. В случае необходимости, этап Е1 можно объединить с этапом Е0, чтобы начинать измерения только при передаче команды С.
Затем способ содержит этап Е2, на котором получают первую форму S1(t) сигнала S1(t) в интервале времени [t1,t1+Δt]. Этот этап Е2 осуществляют при помощи технологий, аналогичных первому варианту осуществления, и предпочтительно он включает в себя фильтрацию.
В случае разгрузочного вентиля 21, как показано на фиг. 8а, первая форма сигнала S1(t) для давления имеет пики большого значения во время переключения вентиля 21, показанного в два момента t0, tʹ0 на фиг. 8b. Однако два важных различия в поведении системы заставляют изменить то, каким образом способ определяет на основании S1(t) сигнал S2(t), который он определит как соответствующий команде С переключения вентиля 21.
На фиг. 8а показано изменение сигнала S1(t) в течение первого интервала времени А, в котором закрывание вентиля 21 и сильное ускорение режима N2 двигателя 23 накладываются друг на друга, затем в течение второго интервала В, в котором накладываются друг на друга открывание вентиля 21 и сильное замедление режима N2 двигателя 23. В связи с этим на фиг. 8с показано изменение скорости вращения N2 двигателя 23.
В данном случае в отличие от предыдущего случая пик значения в случае закрывания вентиля 21 явно превышает изменения, которые может повлечь за собой даже быстрое изменение режима N2 двигателя 23. Следовательно, порог Sс можно зафиксировать достаточно высоким, чтобы проверять закрывание вентиля 21, не обращая внимание на изменения скорости вращения N2 двигателя 23. Изменение S1(t) во втором интервале времени В показывает, что речь не обязательно идет об открывании вентиля 21.
Способ не использует этапа десенсибилизации и контролирует только закрывание вентиля 21. Следовательно, на этапе Е0 он включает в себя выбор, который запускает наблюдения, только если переключение соответствует закрыванию вентиля 21.
Второе отличие, не показанное на фиг. 8, состоит в том, что на систему могут влиять явления, которые не отслеживаются системой контроля двигателя 23 и, следовательно, являются трудно предсказуемыми. Например, речь может идти об открывании или закрывании вентилей, отбирающих воздух в первичном контуре для регулирования системы повышения давления в кабине самолета. Такие явления или просто плохая работа датчика 26 могут маскировать сигнатуру закрывания вентиля 21 во время теста на сигнале S1(t) или отсутствие этой сигнатуры.
Для повышения надежности обнаружения неисправности, в частности, чтобы избегать ложного тревожного сигнала о неисправности, способ включает в себя подсчет, чтобы определять сигнал S2(t), о котором можно с уверенностью сказать, что он соответствует ответу на команду С закрывания вентиля 21.
В этом варианте осуществления сигнал S2(t) принимают равным на первой стадии сигналу S1(t). Способ содержит этап Е6 применения теста сигнатуры для сигнала S2(t) на выходе этапа Е2, как показано на фиг. 3. Тест применяют так же, как и тест, применяемый к сигналу S2(t) на выходе этапа Е5 при помощи теста сигнатуры в рамках первого варианта осуществления способа, как показано на фиг. 5. В качестве результата тест выдает присутствие или отсутствие сигнатуры закрывания вентиля 21 на S2(t).
На выходе этап Е9 контроля состоит в управлении счетчиком i. Этот счетчик устанавливают на ноль в начале осуществления способа. Затем счетчик i инкрементируют на 1 каждый раз, когда на выходе этап Е6 теста сигнатуры указывает на отсутствие ответа на сигнал S2(t), и осуществляют переустановку на ноль каждый раз, когда тест сигнатуры показывает ответ.
Затем этот счетчик сравнивают с заранее определенным порогом n, чтобы подтвердить неисправность при превышении этого порога.
Иначе говоря, если сигнал S2(t), протестированный в ходе предыдущего этапа Е6, соответствует циклу из n+1 последовательных отсутствий ответа, на этапе контроля Е9 делают вывод, что речь идет о форме сигнала S2(t), действительно согласующейся с командой управления вентилем, и что он соответствует неисправности.
В представленном примере используют порог n, равный 1, что соответствует двум последовательным отсутствиям ответа. При этом можно предусмотреть более высокие значения порога n.
В этом случае этап контроля Е9 запускает этап Е8, сигнализирующий о подтвержденной неисправности, аналогично первому варианту осуществления.
Если счетчик i не равен нулю, но ниже порога, на этапе Е9 делают вывод, что сигнал S2(t), протестированный после подачи команды на вентиль, не согласуется в достаточной степени с этой командой. В этом случае этап Е9 прекращают и продолжают контролировать систему, пропуская этап Е8, указывающий на подтвержденную неисправность.
Если счетчик i является нулевым, на этапе контроля не обязательно принимают решение о согласованности или несогласованности сигнала, а приходят к тому же результату, что и в предыдущем случае. Этап Е9 тоже прекращают, не сигнализируя о неисправности.
В первой версии способа, показанной на фиг. 9, в случае, когда счетчик не равен нулю, но ниже порога, можно на этапе Е10, следующем за этапом контроля Е9, сохранить в памяти информацию, чтобы в дальнейшем указать на неподтвержденную неисправность во время операции обслуживания.
В другой версии способа, если необходимо проверить действительное наступление случаев ответа на команду вентиля, на этапе контроля Е9 можно применить логическую схему подсчета последовательных циклов положительных результатов теста сигнатуры, аналогично тому, что было описано для случая отсутствия ответа.
Порог Sс и промежутки времени, определяющие интервал [t1,t1+Δt], являются параметрами, предварительно определенными для осуществления способа и связанными с работой двигателя 23.
Как показано на фиг. 10, система обнаружения неисправности, выполненная с возможностью осуществления способа, содержит электронную схему и датчики.
Первая ветвь схемы соединена с системой 27 управления переключением вентиля 21. Она содержит часовой модуль 28, который обнаруживает команду С закрывания вентиля 21 в момент t0 и определяет границы интервала времени [t1,t1+Δt], используемого для теста сигнатуры.
Вторая ветвь электронной схемы соединена с датчиком 26 давления Р в первичном контуре двигателя 23, как было указано в описании способа, и содержит модуль 29, выполненный с возможностью фильтровать и дифференцировать сигнал Р(t) датчика 26. Этот модуль 29, соединенный с часовым модулем 28, выдает на входе форму сигнала S1(t) за интервал времени [t1,t1+Δt].
Тестовый модуль 30, получающий сигнал S1(t) на выходе модуля 29 вычисления сигнала S1(t), соединенный с часовым модулем 28 и параметризованный в зависимости от выбранного порога Sс, осуществляет тест сигнатуры в интервале времени [t1,t1+Δt] после подачи команды С закрывания вентиля 21 и передает логический результат Ip неисправности или работы в модуль 31 контроля.
Модуль 31 контроля управляет логической схемой, описанной для этапа контроля, используя последовательные результаты Ip. В случае необходимости, он передает тревожный сигнал Ia о неисправности и может подать команду на сохранение подтвержденных или неподтвержденных неисправностей в зависимости от случая в считываемой памяти 32.
Другие версии
Изобретение может включать в себя версии, чтобы учитывать особенности контролируемой системы.
Например, во втором варианте осуществления этап Е0 может включать в себя обнаружение открывания вентиля 21, чтобы отменить запуск следующих этапов в случае, если две команды С следуют друг за другом слишком быстро. Действительно, если подача двух команд происходит за слишком короткий промежуток времени, вентиль 21 может не успеть открыться, и эта версия позволяет избежать в этом случае связывания отсутствия сигнатуры с неисправностью вентиля. Этот тип изменения можно внести также в первый вариант осуществления.
Изобретение относится также к комбинации первого и второго вариантов осуществления, например, если необходимо обнаруживать неисправность при открывании разгрузочного вентиля 21.
В этом случае, как показано на фиг. 11, способ содержит такие же этапы, как и во втором варианте осуществления, чтобы применять логическую схему подсчета и избегать объявления неисправности, связанной с неконтролируемыми внешними явлениями. Однако этот способ тоже включает в себя этапы Е3, Е4 и Е5 для десенсибилизации сигнала S1(t) по отношению к режиму N2 двигателя 23 с целью применения теста сигнатуры на этапе Е6 к десенсибилизированному сигналу S2(t).
Объектом изобретения является способ контроля вентиля в газотурбинном двигателе, при этом упомянутый вентиль производит переключение в ответ на команду (С), переданную в определенный момент (t0), при этом упомянутый способ содержит этап (Е2) вычисления первой формы (S1) временного сигнала (S(t)) на основании изменения переменной состояния (Р) упомянутого газотурбинного двигателя, реагирующей на переключение упомянутого вентиля, затем этап (Е6) применения теста сигнатуры переключения вентиля к второй форме (S2) упомянутого сигнала (S(t)), отличающийся тем, что содержит так называемый этап (Е5) десенсибилизации, на котором упомянутую вторую форму (S2) сигнала вычисляют на основании первой формы (S1) сигнала. 9 з.п. ф-лы, 11 ил.
1. Способ контроля вентиля (1) в газотурбинном двигателе (4), при этом упомянутый вентиль (1) производит переключение путем закрывания и/или открывания в ответ на команду (С), переданную в определенный момент (t0), при этом упомянутый способ содержит:
- этап (Е2) вычисления первой формы (S1) временного сигнала (S(t)) на основании изменения переменной состояния (Р) упомянутого газотурбинного двигателя (4, 23), реагирующей на переключение упомянутого вентиля (1), затем
- этап (Е6) применения теста сигнатуры переключения вентиля (1) к второй форме (S2) упомянутого сигнала (S(t)), вычисленной на основании первой формы (S1),
отличающийся тем, что дополнительно содержит
- этап (Е0), на котором определяют интервал времени [t1, t1+Δt] после передачи упомянутой команды (С) для осуществления упомянутого теста (Е6) сигнатуры,
- причем этап считывания одного или нескольких других параметров (N2), отличных от переключения вентиля (1),
- этап моделирования сигнала (SM(t))_упомянутого временного сигнала (S(t)) в ответ на изменение упомянутого или упомянутых других параметров (N2) для вычисления его изменения, и
так называемый этап (Е5) десенсибилизации, на котором упомянутую вторую форму (S2) сигнала вычисляют на основании первой формы (S1) сигнала, вычитая из нее изменение (SM(t)) сигнала (S(t)), вычисленное на основании изменения упомянутого или упомянутых других параметров (n2) за упомянутый интервал времени [t1, t1+Δt] после команды (С).
2. Способ по предыдущему пункту, в котором упомянутый сигнал (S(t)) отображает временную производную упомянутой переменной состояния (P(t)), предпочтительно в фильтрованном виде.
3. Способ по предыдущему пункту, в котором упомянутая переменная состояния (P(t)) является давлением газов в контуре газотурбинного двигателя (4).
4. Способ по предыдущему пункту, в котором сигнатура работы вентиля (1, 21) соответствует тесту прохождения сигнала (S(t)) через пик значения, который должен переходить определенный порог (Sc, S'c) в положительном или отрицательном направлении.
5. Способ по одному из пп. 1-4, в котором между подачей (t0) команды (С) переключения вентиля (1, 21) и упомянутым интервалом времени [t1, t1+Δt] предусмотрен определенный промежуток времени (dt).
6. Способ по одному из пп. 1-4, содержащий тест на этапе (Е0) определения интервала времени, чтобы не запускать последующие этапы, если две противоположные команды (С) переключения вентиля (21) следуют друг за другом в определенном промежутке времени.
7. Способ по одному из пп. 1-4, содержащий этап (Е7), на котором идентифицируют возможное отсутствие ответа на упомянутый тест сигнатуры на второй форме (S2) сигнала, чтобы во время следующего этапа (Е8) подать тревожный сигнал о подтвержденной неисправности на упомянутом вентиле (1).
8. Способ по одному из пп. 1-4, отличающийся тем, что содержит этап (Е9), на котором идентифицируют подтвержденную неисправность, если на этапе (Е6) применения теста сигнатуры было отмечено отсутствие ответа для серии из n последовательных команд (С), включая текущую команду, при этом n превышает или равно двум, в противном случае идентифицируют отсутствие подтвержденной неисправности.
9. Способ по предыдущему пункту, содержащий этап (Е10) сохранения в памяти результата этапа (Е6) применения теста сигнатуры.
10. Способ по одному из пп. 1-4, в котором упомянутый вентиль является вентилем (1) питания реактивной трубы (6), используемой для создания разрежения по меньшей мере в одной масляной камере (2) газотурбинного двигателя, при этом переменной состояния является давление (Р) в контуре питания маслом упомянутой камеры (2), при этом другим параметром, влияющим на упомянутый сигнал (S(t)), является скорость вращения (N2) газотурбинного двигателя (4).
| АВТОМОБИЛЬНАЯ ДОРОГА С ЖЕСТКИМ ПОКРЫТИЕМ ПЛИТАМИ И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2011 |
|
RU2474638C2 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 5750881 А, 12.05.1998 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2308605C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |

