Настоящее изобретение касается устройства цифровой обработки информации, поступающей от гиролазера, а также соответствующего гиролазера.
Это изобретение применяют для любого типа гиролазера с усилительной газовой средой или в твердом состоянии и с треугольным или квадратным, одноосным или трехосным резонатором.
Гиролазер является датчиком скорости, использующим лазерный луч. Его применяют для измерения угловых скоростей вращения подвижного носителя. В частности, этот тип прибора используют в авиации.
Разработанный тридцать лет назад гиролазер получил широкое распространение в наши дни. Принцип его работы основан на эффекте Саньяка, который приводит к разности частоты между двумя оптическими модами излучения, распространяющимися в противоположных направлениях и называемых модами противоположного распространения. Лазерный резонатор, чаще всего имеющий квадратную или треугольную форму, оборудован в каждом из своих углов зеркалами, отражающими два излучаемых сигнала.
На любом гиролазере для оптимальной работы датчика необходимо наличие нескольких цепей автоматического регулирования с целью получения оптического сигнала, содержащего информацию об угловой скорости подвижного носителя. Так, различают:
- контур автоматического регулирования длины резонатора, который предназначен для поддержания внутренней длины резонатора в значении, кратном длине волны двух оптических мод,
- контур автоматического регулирования активации, который предназначен для поддержания колебательного движения, позволяя свести к минимуму хорошо известное явление мертвой зоны,
- контур автоматического регулирования мощностей лазера, который позволяет поддерживать два оптических сигнала на постоянном уровне перед обработками вычисления угловой скорости,
- контур автоматического регулирования разрядного тока плазмы, позволяющий поддерживать одинаковый предопределенный ток в каждом резонаторе.
В известных гиролазерах значительная часть этих схем автоматического регулирования в основном работают в аналоговом режиме, что создает проблемы большой площади платы и ограниченной надежности.
Кроме того, чаще всего контур автоматического регулирования активации использует устройство обнаружения, вынесенное на колесо активации, например пьезоэлектрический преобразователь, функция передачи которого может со временем меняться и приводить к необнаруживаемым дефектам, которые влекут за собой ошибки в работе механизма автоматического регулирования активации.
Для решения вышеуказанных проблем настоящее изобретение предлагает решение, позволяющее существенно снизить расходы на изготовление за счет сокращения аналоговых ступеней формирования и за счет устранения устройств обнаружения движения схемы автоматического регулирования активации.
За счет оцифровки всех видов обработки это решение позволяет оптимизировать интегрирование и повысить надежность системы. Наконец, оно позволяет гарантировать отличную стабильность амплитуды активации и повысить долгосрочные характеристики систематических ошибок датчика, в частности, в случае плохо компенсируемых или не компенсируемых паразитных движений.
В связи с этим, объектом настоящего изобретения является гиролазер, содержащий множество зеркал, по меньшей мере один фотодатчик, выдающий два оптических сигнала со сдвигом фазы на 90°, при этом упомянутые сигналы являются оцифрованными, средства управления положением одного из упомянутых зеркал путем преобразования электрического сигнала в механическое усилие, средства активации упомянутого гиролазера в колебательном движении путем преобразования электрического сигнала колебания в механическое усилие и средства измерения угловой скорости упомянутого гиролазера, отличающийся тем, что дополнительно содержит:
- средства выделения фазы α и модуля ρ или квадрата модуля ρ вектора, реальная часть которого образована одним из двух оцифрованных сигналов, а воображаемая часть образована другим оцифрованным сигналом, при этом упомянутый модуль ρ представляет амплитуду упомянутых оптических сигналов, а его квадрат представляет их мощность,
- средства автоматического регулирования длины оптического резонатора по кратному длины волны упомянутых оптических сигналов путем оценки крутизны кривой изменения амплитуды или мощности в зависимости от времени, при этом упомянутые средства производят сигнал коррекции, определяемый в зависимости от упомянутой крутизны и применяемый для упомянутых средств управления,
- средства дифференцирования упомянутой фазы α на заданный период времени, чтобы выдать сигнал, содержащий общую информацию движения упомянутого гиролазера,
- средства автоматического регулирования активации упомянутого гиролазера по колебательному движению, принимающие упомянутый сигнал, из которого извлекают оценку колебательного движения, сообщаемого упомянутому гиролазеру упомянутыми средствами активации, и выдающие упомянутый сигнал колебания, амплитуду которого регулируют по заданному значению амплитуды.
В варианте выполнения изобретения извлечение оценки колебательного движения осуществляют путем фильтрации, подавляющей в упомянутом сигнале низкие частоты ниже заданного порога.
В варианте выполнения изобретения упомянутые средства автоматического регулирования активации содержат, по меньшей мере, средства для
- выравнивания упомянутой оценки колебательного движения,
- вычитания результата выравнивания из заданного значения амплитуды колебания,
- интегрирования результата вычитания на заданный период времени,
- умножения результата интегрирования с упомянутой оценкой, смещенного на заданную фазу θ, для получения упомянутого сигнала колебания.
В варианте выполнения изобретения сдвиг по фазе осуществляют при помощи фильтра со сдвигом фазы или при помощи контура фазовой синхронизации.
В варианте выполнения изобретения фаза θ составляет 180° или 90°.
В варианте выполнения изобретения упомянутые средства автоматического регулирования длины оптического резонатора выполняют, по меньшей мере, следующие этапы:
- сложение опорного синусоидального сигнала заданной частоты и амплитуды с сигналом коррекции упомянутых средств управления положением зеркала упомянутого резонатора,
- когерентную демодуляцию амплитуды или мощности упомянутых сигналов.
В варианте выполнения изобретения когерентную демодуляцию осуществляют путем:
- умножения амплитуды или мощности упомянутых сигналов на упомянутый синусоидальный сигнал заданной частоты и амплитуды,
- интегрирование результата умножения на заданный период времени,
- сложение результата интегрирования и упомянутого синусоидального сигнала для получения упомянутого сигнала коррекции.
В варианте выполнения изобретения упомянутые средства извлечения применяют алгоритм CORDIC.
В варианте выполнения изобретения упомянутый квадрат модуля ρ является фильтруемым при помощи фильтра низких частот.
В варианте выполнения изобретения упомянутый гиролазер дополнительно содержит средства автоматического контроля коэффициента усиления для автоматического регулирования амплитуды или мощности упомянутых сигналов по опорному значению коэффициента усиления.
В варианте выполнения изобретения упомянутые средства управления содержат пьезоэлектрический преобразователь.
В варианте выполнения изобретения упомянутые средства активации содержат механическое колесо активации и пьезоэлектрический привод.
В варианте выполнения изобретения упомянутые средства измерения осуществляют счет/обратный счет импульсов упомянутых сигналов.
В варианте выполнения изобретения упомянутый гиролазер выполняет измерение угловой скорости по трем осям трехгранника, и средства автоматического регулирования длины оптического резонатора дополнительно содержат операцию представления в матричной форме, позволяющую транспонировать оси отражения зеркал оптического резонатора к оптическим осям фотодатчиков.
В варианте выполнения изобретения извлечение оценки колебательного движения определяют на основании матрицы взаимной корреляции трех сигналов, полученных путем дифференцирования фазы α упомянутых оптических сигналов, полученных для каждой из трех осей.
Другие отличительные признаки будут более очевидны из нижеследующего подробного описания, представленного в качестве неограничительного примера, со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - схема, иллюстрирующая известное решение для обработки информации, поступающей от гиролазера.
Фиг. 2 - схема примера выполнения контура автоматического регулирования длины резонатора.
Фиг. 3 - схема примера выполнения контура автоматического регулирования активации.
Фиг. 4 - схема, иллюстрирующая заявленное устройство цифровой обработки информации, поступающей от гиролазера.
На фиг. 1 показана электроника обработки известного гиролазера. На схеме показаны только те элементы, которые необходимы для понимания изобретения, в частности оптический резонатор и контур автоматического регулирования тока плазмы на фигуре не показаны. Пунктирной рамкой выделена совокупность обработок аналогового сигнала, сплошной рамкой показаны цифровые обработки.
Фотодатчик 101, например фотоэлектрический элемент или любой другой датчик, преобразующий поглощаемый им свет в измеряемую электрическую величину, принимает два синусоидальных сигнала, смещенных по фазе на 90°, соответствующих двум лазерным волнам противоположного распространения, которые прошли через оптический резонатор гиролазера в противоположных направлениях, и выдает два электрических сигнала 102, 103. Эти два сигнала 102, 103 проходят предварительное усиление в усилителях 104, 105 с низким уровнем шума и с фиксированным коэффициентом усиления, затем усиление в усилителях 106, 107 с переменным коэффициентом усиления. Для двух усиленных синусоидальных сигналов применяют два гистерезисных компаратора 108, 109, чтобы выдать два квадратных сигнала, на основании которых при помощи соответствующих средств 118 определяют информацию угловой скорости 120. Средства 118 производят измерение угловой скорости на основании числа импульсов и их соответствующих фаз. Импульс возникает, когда перед фотодатчиком проходит интерференционная полоса. Эта полоса соответствует фиксированному и известному угловому вращательному перемещению гиролазера, которое зависит от физических характеристик. Если подсчитать число импульсов за единицу времени, из него можно вывести угловую скорость вращения. Единицу времени определяют по частоте дискретизации 119. Относительную фазу сигналов можно поменять на обратную, если гирометр вращается в противоположном направлении, при этом средства 118 измерения должны применять счет и обратный счет импульсов в зависимости от их относительной фазы. Устройство счета/обратного счета с фиксированной частотой дискретизации 119 является известным методом, предназначенным для измерения угловой скорости в гирометре. Не выходя за рамки изобретения, можно применять и другие известные методы.
Автоматическое регулирование мощности лазера
Средства 121 автоматического контроля коэффициента усиления или мощности лазерных сигналов 102, 103 управляют двумя усилителями 106, 107 с переменным коэффициентом усиления, чтобы автоматически регулировать уровень сигналов по опорному значению 123, например по значению 1 вольт/пик. Для этого сигналы, выдаваемые на выходе усилителей 106, 107 с переменным коэффициентом усиления, выпрямляют 112, 113, затем оцифровывают 115, 116, чтобы средства 121 осуществили измерение их средней мощности, затем выдали два заданных значения коэффициента усиления, которые преобразуют 110, 111, аналогичным образом, для управления усилителями 106, 107 с целью автоматического регулирования мощности по опорной мощности 123 и также сохранения правильного подбора двух сигналов между собой. Средства 121 автоматического контроля коэффициента усиления реализуют цифровой корректор пропорционально-интегрального типа (PI) или производного пропорционально-интегрального (PID) типа, который выдает цифровой сигнал управления, позволяющий автоматически регулировать амплитуду сигналов 102, 103 перед компараторами 108, 109 по фиксированному значению.
После предварительного усиления 105 в усилителе с фиксированным коэффициентом усиления один из двух сигналов 103 выделяют, затем выпрямляют 114 и оцифровывают 117, перед тем, как подать на вход средств 124 автоматического регулирования длины оптического резонатора гиролазера.
Автоматическое регулирование длины резонатора
Чтобы обнаруживать интерференционные полосы двух оптических мод с хорошим контрастом и оптимизировать характеристики гиролазера, необходимо поддерживать длину оптического резонатора гиролазера в значении, кратном длине волны лазерного сигнала. Под длиной резонатора следует понимать общую длину пути, который проходит волна внутри резонатора после последовательных отражений на зеркалах внутри резонатора. Для сохранения этого свойства одно из зеркал выполняют подвижным и им управляют при помощи средств 128 управления, например пьезоэлектрического преобразователя или любого другого средства, позволяющего преобразовать электрический сигнал в механическое усилие, которые непрерывно корректируют длину резонатора, автоматически регулируя ее по кратному длины волны сигналов. Средства 128 управления активируют при помощи средств 124 автоматического регулирования длины резонатора, которые выдают оцифровываемую 126 и усиливаемую 127 информацию коррекции.
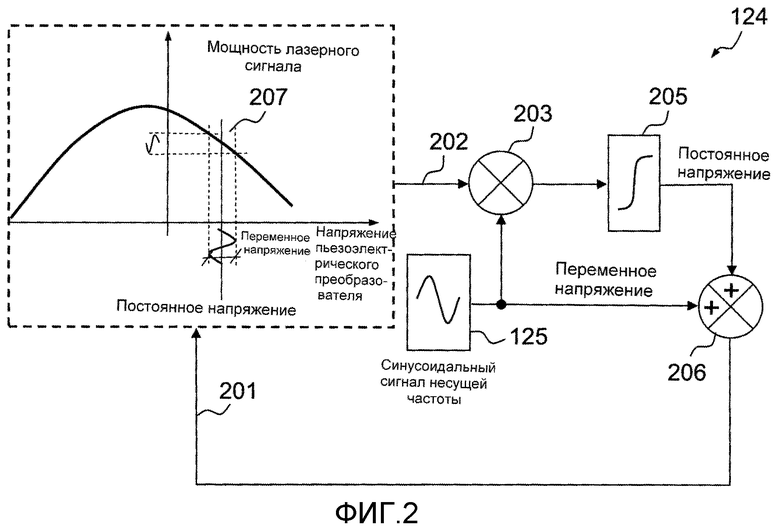
На фиг. 2 показан пример выполнения средств 124 автоматического регулирования длины резонатора. Принцип, применяемый для коррекции длины оптического резонатора, состоит в автоматическом регулировании мощности лазерного сигнала по максимуму, который появляется, когда длина резонатора равна кратному длины волны оптических сигналов. Для этого известный синусоидальный сигнал 125 слабой амплитуды добавляют к электрическому сигналу 201, передаваемому на пьезоэлектрический преобразователь 128. Сигнал 202, принятый средствами 124 автоматического регулирования, когерентно демодулируют, применяя для него умножение 203 на упомянутый сигнал 125 чистой несущей, затем интегрирование 205, чтобы определить крутизну 207 силового лазерного сигнала, которую затем следует скорректировать, добавив 206 это значение к сигналу 201 управления пьезоэлектрического преобразователя.
Не выходя за рамки изобретения, можно предусмотреть другие варианты выполнения средств 124 автоматического регулирования длины оптического резонатора, выполняющих такую же функцию.
В случае трехосного гиролазера перед цифро-аналоговым преобразованием 126 осуществляют дополнительную операцию представления в матричной форме, чтобы привести преобразование к оси резонатора. Речь идет о матрице прохождения, позволяющей транспонировать оси отражения зеркал оптического резонатора к оптическим осям фотодатчиков.
Автоматическое регулирование активации
Гиролазер содержит также механическое колесо активации 135, функцией которого является обеспечение постоянного движения резонатора, чтобы избежать известного явления мертвой зоны, то есть зоны, в которой гиролазер перестает обнаруживать вращение подвижного носителя, если скорость вращения является низкой. Чтобы противостоять этому явлению, колесо 135 активации сообщает колебательное движение, называемое также активацией, резонатору гиролазера.
Колесо 135 активации является механическим устройством типа груз-пружина, имеющим свою собственную резонансную частоту. Средства 130 автоматического регулирования активации предназначены для поддержания колебания колеса 135 по его основной частоте, а также по постоянной заданной амплитуде.
Для этого колесо 135 содержит средства 135а обнаружения его колебательного движения, которые преобразуют скорость колебания в электрический сигнал, который затем усиливают 133 и оцифровывают 131. Средства 130 автоматического регулирования активации определяют сигнал коррекции в зависимости от опорного заданного значения 129 по амплитуде и по фазе. Упомянутый сигнал 132 преобразуют в аналоговый 132, затем усиливают 134, после чего подают на устройство 135b, которое содержит колесо 135 активации и позволяет преобразовать упомянутый сигнал коррекции в механическое усилие, прикладываемое к упомянутому колесу таким образом, чтобы автоматически регулировать его колебательное движение по опорному заданному значению 129. Такое устройство 135b может быть, например, пьезоэлектрическим приводом.
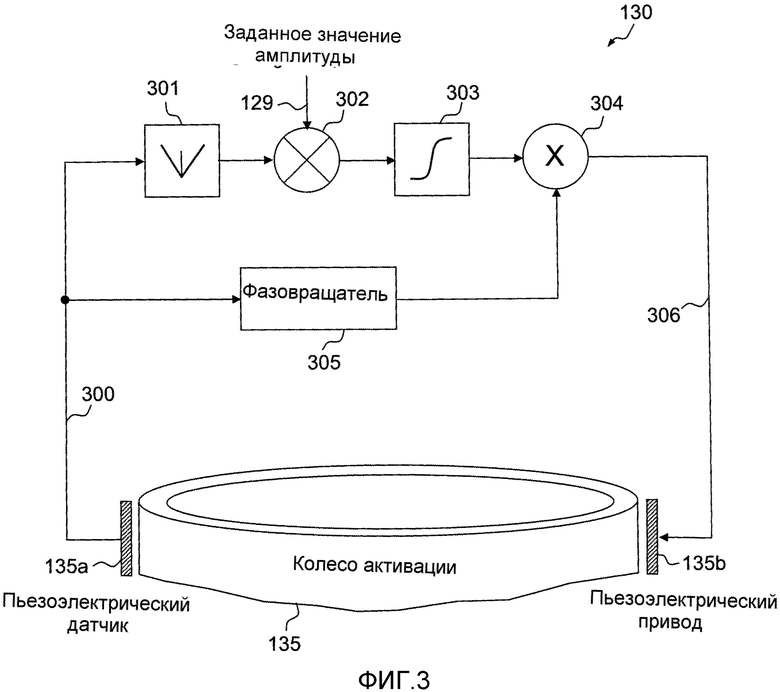
На фиг. 3 показан пример выполнения средств 130 автоматического регулирования активации. Синусоидальный электрический сигнал 300, выдаваемый средствами 135а обнаружения, является оценкой колебательного движения колеса 135. Его выпрямляют 301, затем вычитают из заданного значения 129 амплитуды и интегрируют 303. На своем выходе интегратор 303 выдает переменный коэффициент усиления, который соответствует обнаруженной погрешности между амплитудой синусоидального сигнала 300 и заданным значением 129. Затем этот коэффициент усиления вводят в сигнал 306 колебания, подаваемый на приводное устройство 135b через умножитель 304. Таким образом, осуществляют автоматическое регулирование амплитуды сигнала 306 колебания по контролируемому значению амплитуды 129.
Для реальной активации колеса 135 необходимо реализовать условие колебания, осуществив сдвиг фазы 305 между сигналом 300, поступающим от средств 135а обнаружения, и сигналом 306 колебания. Это условие колебания позволяет поддерживать движение колеса на резонансной частоте. Для этого сдвиг фазы 305 должен соответствовать резонансной частоте колеса 135.
Например, значение сдвига фазы может быть, по существу, равно 180° или 90°, если средства 135а обнаружения выполнены в виде пьезоэлектрического датчика.
Сдвиг фазы 305 на значение, равное θ, можно реализовать при помощи аналогового или цифрового фильтра, фаза которого, по существу, равна θ для значений частоты, по существу, равным резонансной частоте колеблющейся системы. Его можно также осуществлять при помощи контура фазовой синхронизации или при помощи любых других средств, позволяющих сообщать фиксированный сдвиг фазы синусоидальному сигналу 300.
Для нормальной работы системы важно, чтобы колебание колеса 135 имело постоянную амплитуду. Действительно, влияние этого известного движения активации необходимо устранить при помощи цифровых обработок, находящихся за средствами 118 измерения угловой скорости, чтобы сохранять только полезное движение гиролазера. Эти обработки требуют калибровки, а нестабильность амплитуды активации приводит к нестабильности погрешности на выходе.
Недостатком описанного выше принципа автоматического регулирования активации является использование датчиков 135а, которые могут быть подвержены не воспроизводимым дефектам, связанным с износом в течение времени. Их функция передачи может ухудшиться, что приводит к ошибкам обнаружения, которые не могут быть компенсированы средствами 130 автоматического регулирования, поскольку они никогда не измеряются.
Настоящее изобретение предлагает решение, позволяющее, в частности, решить эту проблему и отказаться от использования такого датчика 135а.
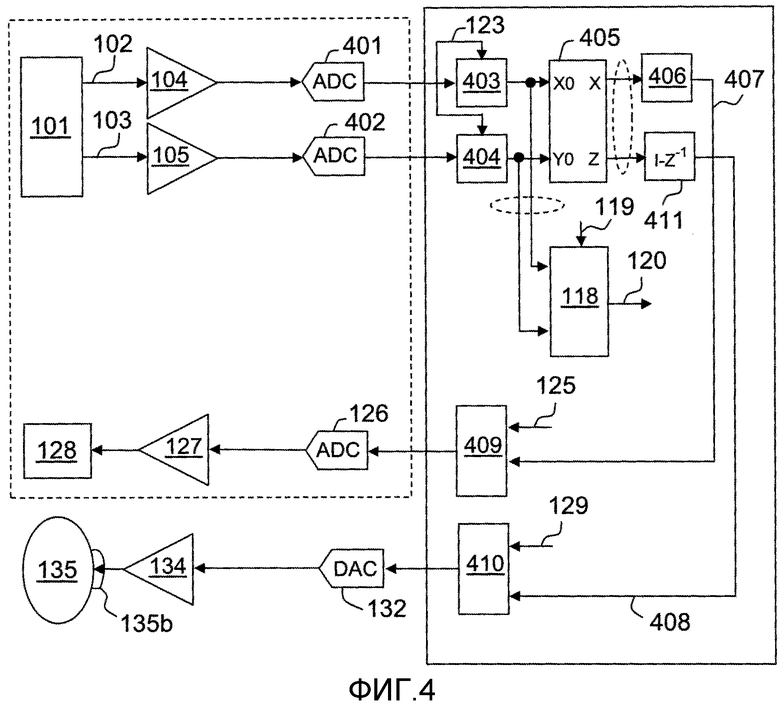
На фиг. 4 показана электроника обработки гиролазера в соответствии с настоящим изобретением. Аналоговая часть устройства значительно сократилась по сравнению с известным решением, показанным на фиг. 1. Оптические сигналы со сдвигом фазы на 90° поступают от фотодатчика 101 и усиливаются в двух усилителях 104, 105 с низким уровнем шума и с постоянным коэффициентом усиления, затем проходят непосредственную оцифровку 401, 402. Средства 403, 404 масштабирования сигналов обеспечивают автоматический контроль коэффициента усиления упомянутых оцифрованных оптических сигналов и их подбор таким образом, чтобы получаемый на двух каналах коэффициент усиления был, по существу, идентичным. Получаемая при этом полоса пропускания автоматического контроля коэффициента усиления должна быть достаточно малой, чтобы не маскировать несущую 125, модулируемую для автоматического регулирования длины резонатора. Под достаточной малой следует понимать полосу пропускания, по меньшей мере, меньшую декады частоты модулирования несущей 125. В случае фотодатчиков 101, обладающих хорошей воспроизводимостью, средства 403, 404 масштабирования могут быть факультативными.
Оптические сигналы, в случае необходимости, скорректированные по амплитуде, можно рассматривать затем как комплексный сигнал, каждую цифровую выборку которого можно представить в виде комплексного вектора, частота вращения которого содержит информацию об угловой скорости, которую модулируют за счет автоматического колебания колеса 135 активации. Кроме того, несущая 125, используемая средствами автоматического регулирования длины резонатора, модулирует амплитуду оптических сигналов и, следовательно, опосредованно модуль упомянутого комплексного вектора.
Устройство в соответствии с настоящим изобретением содержит средства 405 извлечения фазы и модуля комплексного вектора, представляющих пару оптических сигналов со сдвигом фазы на 90°. В частном варианте выполнения изобретения средства 405 извлечения фазы и модуля реализуют при помощи алгоритма CORDIC, применяемого в его варианте Y-сокращения. Действительно, если алгоритм CORDIC применить к вектору V=1 + jQ и произвести сокращение остатка по Y, выходные данные Xn,Zn алгоритма сводятся после n итераций к следующим значениям:


где An является коэффициентом усиления алгоритма, зависящим от числа n итераций, ρ является модулем комплексного вектора, α является фазой комплексного вектора.
Таким образом, после n итераций получают представление квадрата комплексного вектора, а также представление его фазы.
Не выходя за рамки настоящего изобретения, можно предусмотреть другие средства вычисления модуля и фазы, в частности, модуль можно определить напрямую при помощи следующего выражения 
Устройство в соответствии с настоящим изобретением содержит средства 409 автоматического регулирования длины оптического резонатора, которые принимают на входе, с одной стороны, сигнал несущей 125 с известными коэффициентами модулирования а и круговой частоты ω и, с другой стороны, квадрат модуля комплексного вектора, в случае необходимости, отфильтрованный при помощи фильтра низких частот 406. Действительно, модуль комплексного вектора на выходе средств 405 извлечения можно записать: 

Таким образом, фильтрация низких частот 406 вместе с вычитанием непрерывной компоненты А2 позволяет сохранить только член 
В варианте выполнения средства 409 автоматического регулирования можно также применить для полученного модуля 
Устройство в соответствии с настоящим изобретением содержит также средства 410 автоматического регулирования активации. В отличие от известного решения, информацию о колебательном движении колеса 135 активации не получают при помощи датчика, который содержит упомянутое колесо, и на основании угла α комплексного вектора, выдаваемого средствами 405 извлечения, к которому применяют дифференциатор 411, позволяющий получить соответствующую круговую частоту Ω 408 и опосредованно - частоту F. Круговая частота Ω 408 содержит одновременно информацию о колебательном движении активации, а также о движении подвижного носителя гиролазера. Необходимо только извлечь информацию активации, то есть резонансную частоту F0 и амплитуду А0 колебательного движения колеса 135, чтобы осуществить автоматическое регулирование частоты колебания и ее амплитуды относительного контрольного значения 129. Для этого в рамках изобретения можно применить два метода.
Первый метод состоит в применении фильтра высоких частот для извлечения только информации активации, которая спектрально отделена от информации движения носителя. Действительно, движение колебания, сообщаемое гиролазеру, имеет частоту, намного превышающую частоту движения самого гиролазера или носителя, на котором он установлен. Например, но не ограничительно, частота движения колебания, как правило, составляет примерно несколько сот герц, тогда как частота движения носителя чаще всего составляет примерно десяток герц. Таким образом, можно выделить информацию о движении колебания, устранив низкие частоты при помощи фильтра верхних частот или полосового фильтра.
Второй метод состоит в осуществлении межканальной корреляции трех полученных сигналов в случае трехосного гиролазера. Поскольку движение активации на трех каналах взаимосвязано, эту корреляцию применяют на основании матрицы межканальной корреляции сигналов 407, представляющей фазу α, полученную на каждом из каналов и соответствующую угловой скорости на каждой оси трехгранника.
После определения оценки 408 движения колебания средства 410 автоматического регулирования применяют метод, идентичный методу, описанному со ссылками на фиг. 3, например, контур фазовой синхронизации или фильтр-фазовращатель.
Использование фазы комплексного вектора, образованного двумя оптическими сигналами, позволяет отказаться от применения датчика движения, установленного на колесе активации. Полученная амплитуда активации является намного более точной, чем при применении известного датчика активации, так как устройство в соответствии с настоящим изобретением использует непосредственно оптический сигнал, содержащий реальную информацию движения, а не представление, искаженное погрешностями, свойственными таким датчикам.
Сигнал угловой скорости 120 определяют классические средства 118 измерения, применяемые для оцифрованных оптических сигналов, дискриминированных по частоте 119 и, в случае необходимости, скорректированных 403, 404 по мощности.
Устройство в соответствии с настоящим изобретением, описанное со ссылками на фиг. 4, предназначено для одноосного гиролазера, однако изобретение не ограничивается этим вариантом и распространяется также на трехосные гиролазеры, которые позволяют производить измерение угловой скорости на трех осях при помощи одного оптического блока. В этом последнем случае все элементы, которые содержит устройство в соответствии с настоящим изобретением, утроены, чтобы производить три измерения 120 угловой скорости по каждой из осей. Не утраиваются только колесо 135 активации, а также элементы управления 132, 134. Между средствами 409 автоматического регулирования длины резонатора и цифро-аналоговым преобразователем 126 вставляют только дополнительную операцию представления в матричной форме, чтобы получить коррекцию по оси резонатора.
Функция 135 активации должна быть осуществлена сразу после запуска гиролазера, чтобы избежать явления маркировки зеркал. Средства 410 автоматического регулирования активации используют оптические сигналы 102, 103 для извлечения из них информации о колебательном движении активации, следовательно, активацию нельзя осуществлять сразу при запуске гиролазера. В отсутствие колебания лазерный сигнал может маркировать зеркало, которое при запуске является неподвижным. Чтобы устранить этот недостаток, производят частотный импульс или серию импульсов в цифровом режиме и заменяют ими номинальную команду для использования при запуске в качестве приводного возбуждения колеса активации.
Изобретение позволяет сократить число аналоговых ступеней, по существу, на 50% в случае одноосного или трехосного гиролазера.
Предложенное изобретение относится к устройствам для цифровой обработки информации, поступающей от гиролазера (лазерного гироскопа). Предложенный гиролазер с оптическим резонатором содержит множество зеркал, по меньшей мере один фотодатчик (101), выдающий два оптических сигнала (102, 103) со сдвигом фазы на 90°, при этом упомянутые сигналы (102, 103) являются оцифрованными (401, 402), средства (128) управления положением одного из упомянутых зеркал путем преобразования электрического сигнала в механическое усилие, средства (135) активации упомянутого гиролазера в колебательном движении путем преобразования электрического сигнала колебания (306) в механическое усилие и средства (118) измерения угловой скорости (120) упомянутого гиролазера, отличающийся тем, что дополнительно содержит: средства (405) извлечения фазы α и модуля ρ или квадрата модуля ρ упомянутых оптических сигналов (102, 103), средства (409) автоматического регулирования длины оптического резонатора, средства (411) дифференцирования упомянутой фазы α на заданный период времени, чтобы выдать сигнал (408), содержащий общую информацию движения упомянутого гиролазера, средства (410) автоматического регулирования активации упомянутого гиролазера по упомянутому колебательному движению, принимающие упомянутый сигнал (408), из которого извлекают оценку (300) колебательного движения, сообщаемого упомянутому гиролазеру упомянутыми средствами (135) активации, и производящие упомянутый сигнал колебания (306), амплитуду которого регулируют по заданному значению амплитуды (129). Данное изобретение обеспечивает стабильность амплитуды активации и позволяет повысить характеристики систематических ошибок гиролазера. 14 з.п. ф-лы, 4 ил.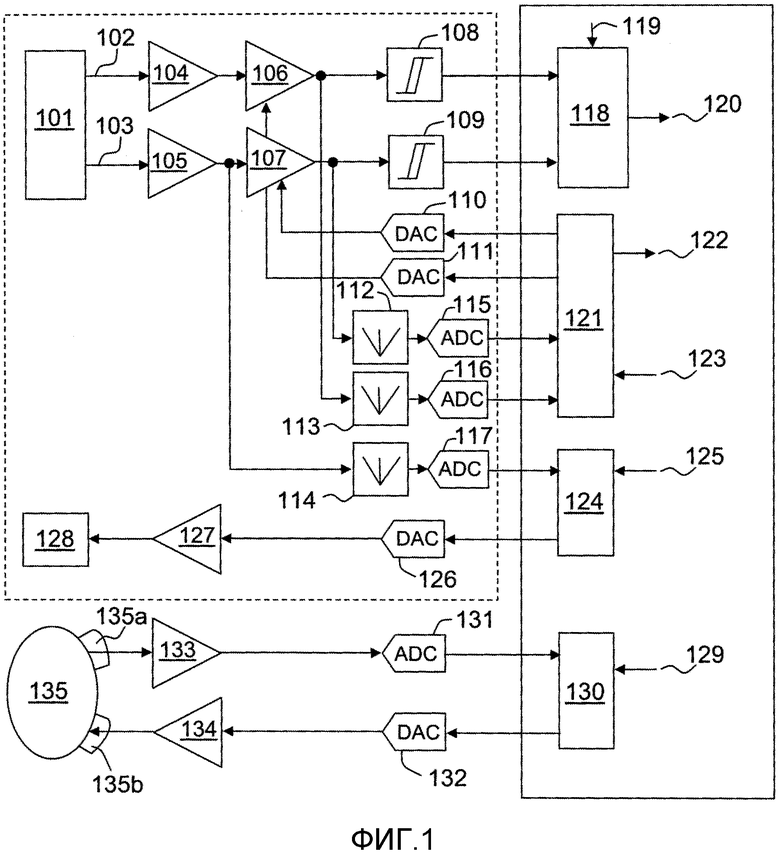
1. Гиролазер с оптическим резонатором, содержащий множество зеркал, по меньшей мере один фотодатчик (101), выдающий два оптических сигнала (102, 103) со сдвигом фазы на 90°, при этом упомянутые сигналы (102, 103) являются оцифрованными (401, 402), средства (128) управления положением одного из упомянутых зеркал путем преобразования электрического сигнала в механическое усилие, средства (135) активации упомянутого гиролазера в колебательном движении путем преобразования электрического сигнала колебания (306) в механическое усилие и средства (118) измерения угловой скорости (120) упомянутого гиролазера, отличающийся
тем, что дополнительно содержит:
- средства (405) извлечения фазы α и модуля ρ или квадрата модуля ρ вектора, действительная часть которого образована одним из двух оцифрованных сигналов (102), а мнимая часть образована другим оцифрованным сигналом (103), при этом упомянутый модуль ρ представляет амплитуду (407) упомянутых оптических сигналов (102, 103), а его квадрат представляет их мощность (407),
- средства (409) автоматического регулирования длины оптического резонатора по кратному длины волны упомянутых оптических сигналов (102, 103) путем оценки крутизны кривой изменения амплитуды или мощности (407) в зависимости от времени, при этом упомянутые средства (409) производят сигнал (201) коррекции, определяемый в зависимости от упомянутой крутизны и применяемый для упомянутых средств (128) управления,
- средства (411) дифференцирования упомянутой фазы α на заданный период времени, чтобы выдать сигнал (408), содержащий общую информацию движения упомянутого гиролазера,
- средства (410) автоматического регулирования активации упомянутого гиролазера по упомянутому колебательному движению, принимающие упомянутый сигнал (408), из которого извлекают оценку (300) колебательного движения, сообщаемого упомянутому гиролазеру упомянутыми средствами (135) активации, и производящие упомянутый сигнал колебания (306), амплитуду которого регулируют по заданному значению амплитуды (129).
2. Гиролазер по п.1, отличающийся тем, что выделение оценки (300) колебательного движения осуществлено путем фильтрации, подавляющей в упомянутом сигнале низкие частоты (408) ниже заданного порога.
3. Гиролазер по п.2, отличающийся тем, что упомянутые средства (410) автоматического регулирования активации содержат, по меньшей мере, средства для
- выравнивания (301) упомянутой оценки (300) колебательного движения,
- вычитания (302) результата выравнивания (301) из заданного значения амплитуды колебания (129),
- интегрирования результата вычитания (302) на заданный период времени,
- умножения (304) результата интегрирования с упомянутой оценкой (300), смещенного (305) на заданную фазу θ, для получения упомянутого сигнала колебания (306).
4. Гиролазер по п.3, отличающийся тем, что сдвиг по фазе (305) осуществляют при помощи фильтра со сдвигом фазы или при помощи контура фазовой синхронизации.
5. Гиролазер по п.4, отличающийся тем, что фаза θ составляет 180° или 90°.
6. Гиролазер по п.5, отличающийся тем, что упомянутые средства (409) автоматического регулирования длины оптического резонатора выполняют, по меньшей мере, следующие этапы:
- сложение (206) опорного синусоидального сигнала (125) заданной частоты и амплитуды с сигналом коррекции (201) упомянутых средств (128) управления положением зеркала упомянутого резонатора,
- когерентную демодуляцию амплитуды или мощности (202, 407) упомянутых сигналов (102, 103).
7. Гиролазер по п.6, отличающийся тем, что когерентная демодуляция осуществляется путем:
- умножения (203) амплитуды или мощности (202, 407) упомянутых сигналов (102, 103) на упомянутый синусоидальный сигнал (125) заданной частоты и амплитуды,
- интегрирование (205) результата умножения (203) на заданный период времени,
- сложение (206) результата интегрирования (205) и упомянутого синусоидального сигнала (125) для получения упомянутого сигнала коррекции (201).
8. Гиролазер по п.7, отличающийся тем, что упомянутые средства (405) выделения применяют алгоритм CORDIC.
9. Гиролазер по п.8, отличающийся тем, что упомянутый квадрат модуля ρ является фильтруемым (406) при помощи фильтра низких частот.
10. Гиролазер по п.9, отличающийся тем, что дополнительно содержит средства (403, 404) автоматического контроля коэффициента усиления для автоматического регулирования амплитуды или мощности упомянутых сигналов (102, 103) по опорному значению (123) коэффициента усиления.
11. Гиролазер по п.10, отличающийся тем, что упомянутые средства (128) управления содержат пьезоэлектрический преобразователь.
12. Гиролазер по п.11, отличающийся тем, что упомянутые средства (135) активации содержат механическое колесо активации и пьезоэлектрический привод (135b).
13. Гиролазер по п.12, отличающийся тем, что упомянутые средства (118) измерения осуществляют счет/обратный счет импульсов упомянутых сигналов (102, 103).
14. Гиролазер по п.13, отличающийся тем, что производит измерение угловой скорости по трем осям трехгранника, и средства (409) автоматического регулирования длины оптического резонатора дополнительно выполняют операцию представления в матричной форме, позволяющую транспонировать оси отражения зеркал оптического резонатора к оптическим осям фотодатчиков (101).
15. Гиролазер по п.14, отличающийся тем, что выделение оценки (300) колебательного движения определяют на основании матрицы взаимной корреляции трех сигналов (408), полученных путем дифференцирования фазы α упомянутых оптических сигналов (102, 103), полученных для каждой из трех осей.
| US 5225889 A, 06.07.1993 | |||
| US 4529311 A, 16.07.1985 | |||
| US 6208414 B1, 27.03.2001 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ УГЛОВОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 1996 |
|
RU2112926C1 |
| ЛАЗЕРНЫЙ ГИРОСКОП | 1999 |
|
RU2167397C2 |

