Изобретение относится к гироскопической технике, более конкретно к способам и устройствам измерения параметров угловой ориентации, построенных на основе использования кольцевых лазеров, и предназначено для применения в инерциальных навигационных системах или для самостоятельного применения для определения параметров угловой ориентации подвижных объектов.
Известно, что кольцевой лазер (КЛ) может использоваться как одноосный первичный измерительный преобразователь, в котором при идеальных условиях разность набегов фаз встречных волн пропорциональна углу, а разность частот встречных волн - угловой скорости вращения КЛ относительно оси чувствительности в инерциальном пространстве [1].
Известно также, что из-за связи встречных волн при малых угловых скоростях КЛ имеют значительную зону нечувствительности (зону синхронизации) по угловой скорости. Поэтому на практике используется режим "частотной подставки", выводящий КЛ из синхронизации.
Предложено несколько способов создания режима частотной подставки [1], однако наиболее значительные результаты достигнуты при использовании механического движения КЛ (виброподставка).
Известен одноосный лазерный измеритель (ЛИ) с виброподставкой, впервые предложенный в [2]. Он включает основание, КЛ, блок возбуждения крутильных колебаний (блок виброподставка), схему компенсации составляющей выходного сигнала КЛ, пропорционального угловой скорости виброподставки (компенсатор).
Для измерения угловой скорости обычно используют три таких ЛИ с взаимно ортогональными осями чувствительности. =Для обеспечения приемлемых параметров крутильных колебаний КЛ относительно основания в режиме частотной подставки между моментами инерции КЛ Iкл и основания Iосн должно выполнятся соотношение Iосн>>Iкл, формальное выполнение которого ведет к неоправданному ухудшению массо-габаритных характеристик прибора.
В бесплатформенных системах ориентации эта проблема решается за счет "присоединения" массы объекта к массе основания, что вызывает необходимость в амортизации прибора.
Еще одна проблема, с которой сталкиваются разработчики платформенных инерциальных навигационных систем [ИНС] на ЛИ с виброподставкой, - отрицательное влияние реактивных моментов блоков виброподставки на акселерометры, которые обычно устанавливаются на общем с ЛИ основании.
Частично проблемы, связанные с взаимодействием вибрирующих КЛ с основанием, разрешаются путем компенсации реактивных моментов блоков виброподставки которого ориентирована специальным образом по отношению к осям виброподвесов КЛ [3]. Недостаток этого решения - конструктивное усложнение прибора, увеличение его массы и габаритов.
Известен способ определения пространственной угловой ориентации подвижного объекта с помощью трех установленных на платформе КЛ с взаимноортогональными осями чувствительности, предлагающий непрерывное вращение платформы относительно первой оси, образующей равные углы с осями чувствительности всех КЛ, и периодически реверсируемое вращение платформы относительно второй оси, ортогональной первой и жестко связанной с объектом, одновременное измерение проекций абсолютной угловой скорости вращения по осям чувствительности КЛ и измерение углов поворота платформы относительно первой и второй осей вращения с помощью датчиков углов, непрерывное вычисление текущей пространственной угловой ориентации объекта по показаниям КЛ и датчиков углов [4].
За счет автокомпенсации погрешности путем вращения КЛ относительно двух ортогональных осей такой способ позволяет существенно повысить точность определения пространственной ориентации (при этом вращение создает режим частотной подставки для КЛ).
Описано также устройство [4], реализующее указанный способ. Устройство включает три КЛ, установленных на платформе в двухосном кардановом подвесе с электроприводами и датчиками угла по осям подвеса, вычислитель, связанный с датчиками угла и КЛ.
Недостатком описанного способа является сложность его практической реализации, что в свою очередь, определяет высокую стоимость при сравнительно низкой надежности устройства. Другими словами, описанный способ и устройство, его реализующее, обладают недостатками как платформенных (сложность и громоздкость электромеханической части), так и бесплатформенных систем (сложность вычислителя).
Следует отметить, что способ автокомпенсации погрешностей заимствован из роторной гироскопии [5] . Практически он был реализован в ИНС типа Carousel-4, Carousel-5 [6, 7], а применительно к ИНС на КЛ описаны, например, в [8].
Был предложен более простой способ определения пространственной угловой ориентации подвижного объекта с помощью трех КЛ, установленных на платформе с взаимно-ортогональными осями чувствительности, предполагающий вращение платформы относительно оси, жестко связанной с объектом и образующей равные углы с осями чувствительности всех КЛ, одновременное измерение проекций абсолютной угловой скорости на оси чувствительности КЛ и измерение угла поворота платформы относительно объекта с помощью датчика угла, вычисленные пространственной угловой ориентации объекта по показаниям кольцевых лазеров и датчика угла [9]. При этом периодически реверсируют направление вращения платформы относительно объекта.
Устройство, реализующее описанный способ, включает одноосную поворотную платформу, жестко связанную с тремя кольцевыми лазерами, оси чувствительности которых взаимно ортогональны и образуют одинаковые углы с осью вращения платформы, датчик угла, электронный блок управления, входы которого связаны с выходами КЛ и датчика угла.
Описанные в [9] способ и устройство выбраны в качестве прототипа. В прототипе частотная подставка для всех КЛ создается путем вращения блока КЛ со скоростью, превышающей скорость поворота объекта относительно любой из трех связанных осей. Например, для самолетов максимальная скорость поворота лежит в диапазоне от нескольких десятков до нескольких сотен град/с и определяется типом самолета. При таких больших скоростях поворота основная погрешность измерения будет определяться нестабильностью Δ Kкл масштабного коэффициента Kкл КЛ. Типичное значение  составляет величину порядка 10-5, поэтому накопленная за один оборот погрешность по углу Δθ = 2πx10-5рад . При скорости вращения
составляет величину порядка 10-5, поэтому накопленная за один оборот погрешность по углу Δθ = 2πx10-5рад . При скорости вращения  эта угловая погрешность эквивалентна дрейфу со скоростью
эта угловая погрешность эквивалентна дрейфу со скоростью  , величина которого недопустима для навигационных систем.
, величина которого недопустима для навигационных систем.
Известен способ существенного снижения упомянутой погрешности путем реверсирования направления вращения. Период реверсирования Tр выбирается из условия незначительного изменения масштабного коэффициента за время Tр. Этот способ дает значительный эффект при измерении постоянных, (например скорости вращения Земли), или медленно изменяющихся скоростей).
В выбранном прототипе для уменьшения упомянутой погрешности также предлагается использовать периодическое реверсирование направления вращения, но не содержится технического решения, обеспечивающего реализацию такого режима.
Следует остановится на основных требованиях, представленных в случае реверсирования направления вращения КЛ на подвижном объекте:
1. Недопустима потеря информации из-за синхронизации встречных волн КЛ.
2. Погрешность измерения при прохождении зоны синхронизации должна быть существенно меньше погрешности от нестабильности масштабного коэффициента КЛ.
Можно показатель (см. приложение), что потери информации не возникает в случае "быстрого" прохождения статической зоны захвата (СЗЗ). Существование этого режима определяется условием ,
,
где
β - безразмерный параметр, характеризующий скорость прохождения СЗЗ;
Kкл= 2π4S/λL - безразмерный масштабный коэффициент КЛ;
S, L - площадь и периметр резонатора КЛ;
ωву - установившаяся скорость вращения блока КЛ, рад/с;
Ω0 - порог синхронизации КЛ, рад/с;
Tм - электромеханическая постоянная электропривода, с;
λ - длина волны генерации КЛ;
Погрешность изменения δΔθ (при однократном прохождения СЗЗ) определяется выражением.
 ,
,
или при N-кратном числе проходов ,
,
где
δΔθ,δθ - среднеквадратическое значение погрешности угла, рад; - абсолютное ускорение прохождения СЗЗ, рад/с2.
- абсолютное ускорение прохождения СЗЗ, рад/с2.
Как следует из анализа [1] и [2], для выполнения условия "быстрого выполнения" и снижения погрешности измерения необходимо использовать высококачественные КЛ (с малым Ωo ), быстродействующий электропривод (малую Tм или высокую частоту среза  , а также большую скорость вращения ωву.
, а также большую скорость вращения ωву.
Скорость вращения ограничена:
а) быстродействием вычислителя, который должен в реальном масштабе времени решать уравнения ориентации с требуемыми погрешностями;
б) погрешностью, обусловленной асимметрией масштабного коэффициента на смежных интервалах реверсирования КЛ.
Так как возникает техническое противоречие между выбором значительной скорости вращения КЛ и быстродействием вычислителя, то обычно скорость вращения выбирают несколько больше максимальной скорости поворота объекта [12].
Постоянная времени электропривода Tм [20, 21] пропорциональна моменту инерции I подвижной части и скорости холостого хода ωxx и обратно пропорциональна пусковому моменту Mn:  . Можно уменьшить ωxx увеличением количества полюсов якорной обмотки. Повышением индукции в зазоре и пускового тока можно увеличить Mn. Это приведет к увеличению габаритов якоря (и двигателя в целом). Из-за этого предельно достижимая величина Tм на практике составляет величину (2-5)• 10-2с.
. Можно уменьшить ωxx увеличением количества полюсов якорной обмотки. Повышением индукции в зазоре и пускового тока можно увеличить Mn. Это приведет к увеличению габаритов якоря (и двигателя в целом). Из-за этого предельно достижимая величина Tм на практике составляет величину (2-5)• 10-2с.
Порог захвата Ωo КЛ зависит от технологии изготовления резонатора и для малогабаритных КЛ имеет порядок 50-350 Гц.
Современный электропривод на границе своих возможностей позволяет осуществить реверс направления вращения блока КЛ без потери информации и с допустимой погрешностью, возникающей при прохождении зоны синхронизации.
При реверсе двигатель работает в режиме противовключения и его ток в несколько раз превышает ток в режиме установившегося вращения ωву . Тепловыделение двигателя в этот момент существенно увеличивается.
Количество энергии Δ W, выделяемое при реверсе в цепи якоря двигателя в виде теплоты, равно учетверенному запасу кинетической энергии [20]
при этом можно показать, что среднее Pср и максимальное Pм значения скорости преобразования энергии в тепло (рассеиваемая мощность в двигателе) соответственно равны
где
ωxx , Mn - скорость холостого хода и пусковой момент двигателя, соответственно.
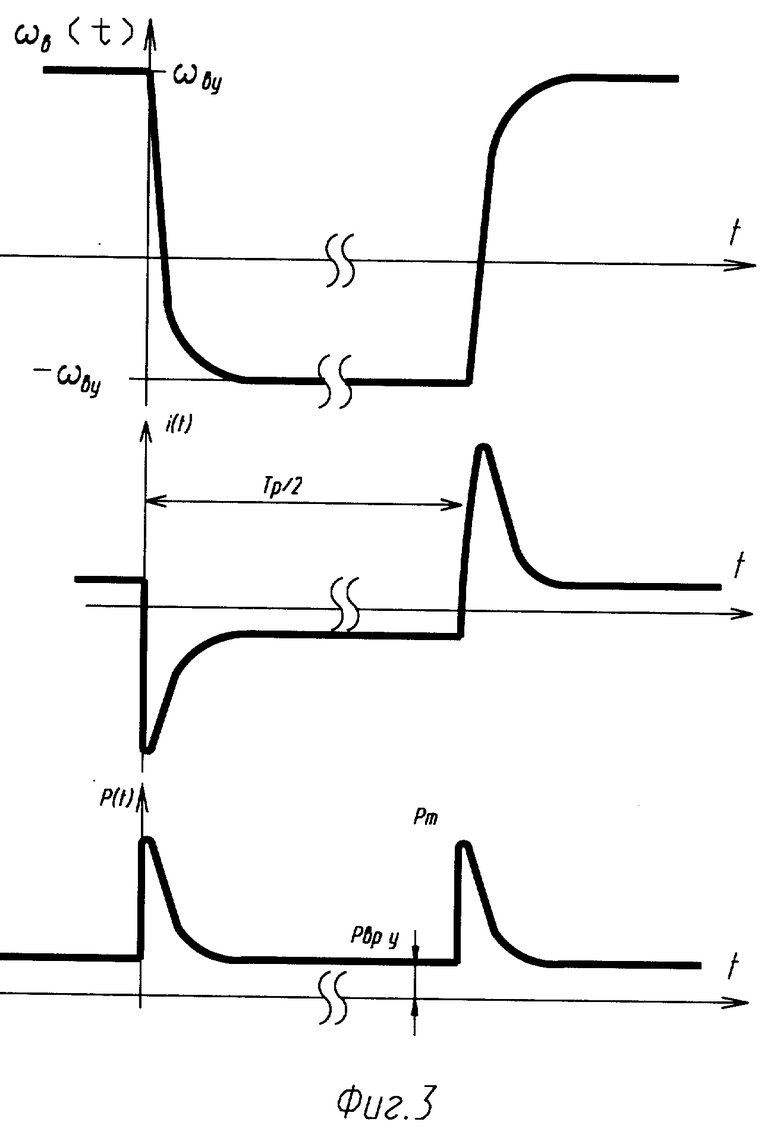
Отношение jn= Pm/Pву максимального значения рассеивания мощности Pmк мощности Pву, рассеиваемой в режиме установившегося вращения, зависит от параметров двигателя и нагрузки. Качественная зависимость мгновенного значения рассеиваемой в двигателе мощности p(t) показана на фиг.3. Имеют место два следствия, которое вытекают из описанного выше:
1. Из-за "быстрого" реверса направления вращения КЛ будут находится в нестационарном тепловом режиме, поскольку на них действуют "тепловые" импульсы, период следования которых Tp/2 намного меньше постоянной времени Tкл тепловых процессов в КЛ (обычно Tкл=10-40 мин).
Как известно [10, 11], основными источниками погрешностей КЛ являются именно изменения температуры. В частности, одна из основных составляющих дрейфа нуля ΔνΔT КЛ обусловлена градиентом температуры вдоль его разрядного промежутка и в первом приближении определяется выражением
где
T - средняя температура активной среды; dT/dz - градиент температуры вдоль активного канала КЛ; A - коэффициент, зависящий от параметров активной среды КЛ. Эта зависимость приведена в [6]. Приближенность модели [6] не позволяет с достаточной степенью точности осуществить схемную компенсацию этой составляющей погрешности при нестационарных тепловых режимах КЛ. Поэтому указанная погрешность является неустранимой.
2. При быстром реверсе направления вращения рабочий ресурс двигателя и всего устройства в целом снижается.
Периодический режим реверса противовключением является более жестким тепловым режимом для двигателя, чем так называемый режим "перемежающийся с частыми реверсами и электромагнитным торможением", для которого уже число включений в час и число реверсов в час существенно ограниченно (по стандартам) и определяется моментом инерции подвижной части. Выбор двигателя с запасом по мощности позволит в этом случае увеличить число допустимых реверсов, но приведет к неоправданному увеличению габаритов и массы устройства.
Кроме того, при быстром изменении тока i(t) в якоре возникают высокие напряжения, обусловленные возникновением ЭДС самоиндукции, прикладываемые к транзисторным ключам электронного коммутатора (при использовании бесколлекторного двигателя) или узлу "коллектор-щетка" (при использовании коллекторного двигателя постоянного тока), что также снижает надежность и рабочий ресурс двигателя.
Таким образом, недостатками прототипа являются:
1. Погрешности измерения, обусловленные нестационарными тепловыми процессами, причиной которых являются внутренние источники. Эти источники являются принципиально неустранимыми в известном способе, поскольку они являются следствием одного из приемов этого способа - быстрого реверса направления вращения.
2. Ограниченный рабочий ресурс устройства, обусловленный конечным числом допустимых циклов реверса электропривода, а также повышенным напряжением на элементах коммутации двигателя при "быстром" реверсе.
Первый недостаток, в частности, не позволяет реализовать потенциальные возможности способа автокомпенсации погрешностей путем вращения гироскопических измерителей, хотя дополнительные затраты на реализацию этого способа проведены.
В способе определения пространственной угловой ориентации подвижного объекта с помощью трех КЛ, установленных на платформе с взаимно ортогональными осями чувствительности, включающем вращение платформы с КЛ относительно оси, жестко связанной с объектом и образующей равные углы с осями чувствительности всех КЛ, одновременное измерение с помощью КЛ проекций абсолютной угловой скорости по их осям чувствительности и измерение угла поворота платформы относительно объекта с помощью датчика угла, вычисление пространственной угловой ориентации объекта по измеренным проекциям угловой скорости и углу поворота платформы, периодическое реверсирование направления вращения платформы, возбуждают крутильные гармонические колебания кольцевых лазеров относительно поворотной платформой с одинаковыми амплитудой и частотой и взаимным фазовым сдвигом 2π/3, причем крутильные колебания КЛ осуществляют относительно их осей чувствительности, одновременно вычитают из измеренных проекций угловой скорости платформы составляющие, равные угловым скоростям упомянутых колебаний соответствующих КЛ.
При этом в первом частном случае выполнения способа крутильные колебания КЛ относительно платформы возбуждают на время реверсирования направления вращения платформы.
При этом во втором частном случае выполнения способа крутильные колебания КЛ относительно платформы возбуждают в течение всего времени измерения, причем скорость вращения платформы выбирают значительно меньше скорости вращения объекта.
Описанный способ реализуется в устройстве - лазерном измерителе.
В лазерный измеритель, содержащий одноосную поворотную платформу с тремя кольцевыми лазерами, оси чувствительности которых взаимно ортогональны и образуют равные углы с осью вращения платформы, исполнительный двигатель со схемой реверса направления вращения, блок управления с первыми сигнальными входами и первым управляющим выходом, связанным через схему реверса с исполнительным двигателем, вычислитель, дополнительно введен трехфазный генератор, каждый кольцевой лазер дополнительно снабжен торсионным виброподвесом, через который он связан с упомянутой платформой, датчиком момента, датчики крутильных колебаний и схемой компенсации, а в блок управления введены три вторых и три третьих сигнальных входа и три вторых управляющих выхода, причем каждая фаза трехфазного генератора связана с соответствующим вторым сигнальным входом блока управления, выходы датчиков крутильных колебаний связаны с соответствующими третьими сигнальными входами блока управления, входы датчиков момента связаны с соответствующими вторыми управляющими выходами блока управления, входы схем компенсации связаны с выходами соответствующих кольцевых лазеров и датчиков колебаний, а выходы - с входами вычислителя.
При этом по первой форме реализации блок управления выполнен в виде трех идентичных блоков синхронизации колебаний с первыми и вторыми входами, трех идентичных блоков подавления, блока коммутации с управляющим, тремя первыми и тремя вторыми сигнальными входами и тремя сигнальными выходами, блока выработки команд с сигнальными входами и первым и вторым управляющим выходами, трех усилителей мощности, причем вторые сигнальные входы блока управления связаны с первыми входами соответствующих блоков синхронизации, а третьи сигнальные входы блока управления связаны с вторыми входами соответствующих блоков синхронизации и входами соответствующих блоков подавления, выходы блоков синхронизации и подавления через соответствующие первые и вторые сигнальные входы, выходы блока коммутации и усилителей мощности связаны с соответствующими вторыми управляющими выходами блока управления, управляющий вход блока коммутации связан с вторым управляющим выходом блока выработки команд, первый управляющий выход которого связан с первым управляющим выходом блока управления, а сигнальные входы - с первыми сигнальными входами блока управления.
При этом по второй форме реализации блок управления выполнен в виде трех идентичных блоков синхронизации колебаний с первым и вторыми входами, усилителей мощности, блока выработки команд с сигнальными входами и управляющим выходом, причем вторые и третьи сигнальные входы блока управления связаны соответственно с первыми и вторыми входами соответствующих блоков синхронизации колебаний, выходы которых через усилители мощности связаны с соответствующими вторыми управляющими выходами блока управления.
При этом в первой и второй формах реализации блока управления блок синхронизации выполнен в виде амплитудного и фазовых детекторов, каждый с первым и вторым входами, и суммирующего устройства, причем первый и второй входы блока синхронизации через соответствующие входы упомянутых детекторов и суммирующее устройство связаны с выходом блока синхронизации.
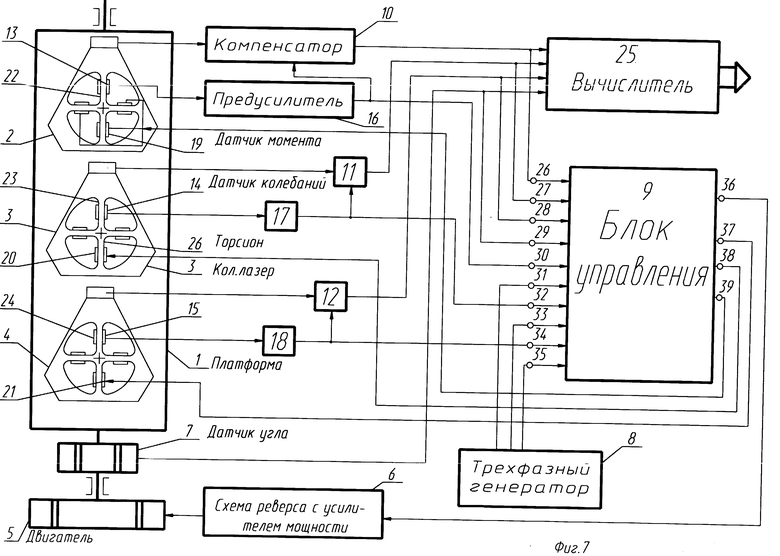
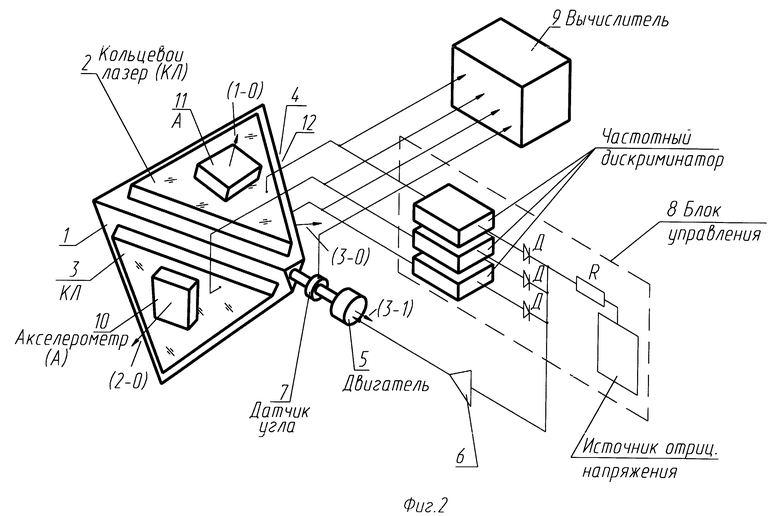
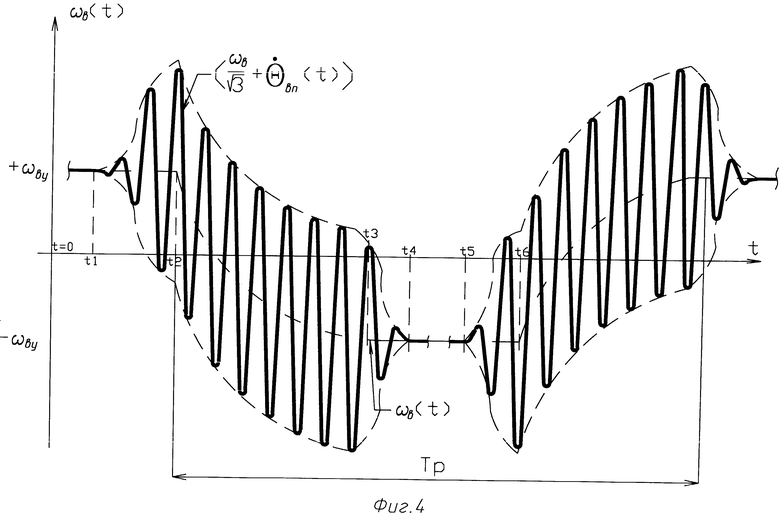
На фиг. 1 представлена функциональная схема известного инерциального измерительного устройства двойного вращения; на фиг.2 - конструктивная и функциональная схема известного устройства для измерения движения относительно нескольких осей, выбранного в качестве прототипа; на фиг.3 - временные диаграммы, поясняющие работу прототипа, где ωв(t) - закон изменения скорости вращения поворотной платформы; i(t) - закон изменения тока в управляющей обмотке моментного двигателя; p(t) - закон изменения мгновенного значения рассеиваемой мощности в двигателе; на фиг. 4 - 6 - представлены временные диаграммы, поясняющие работу по предлагаемому способу, причем на фиг. 4, 5 - временные диаграммы для скорости вращения платформы  относительно основания и суммарной скорости вращения i-го КЛ относительно основания
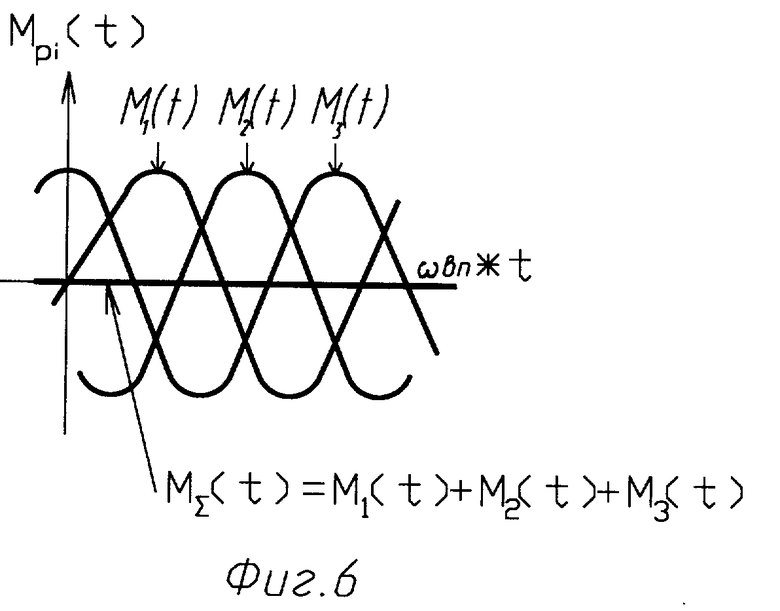
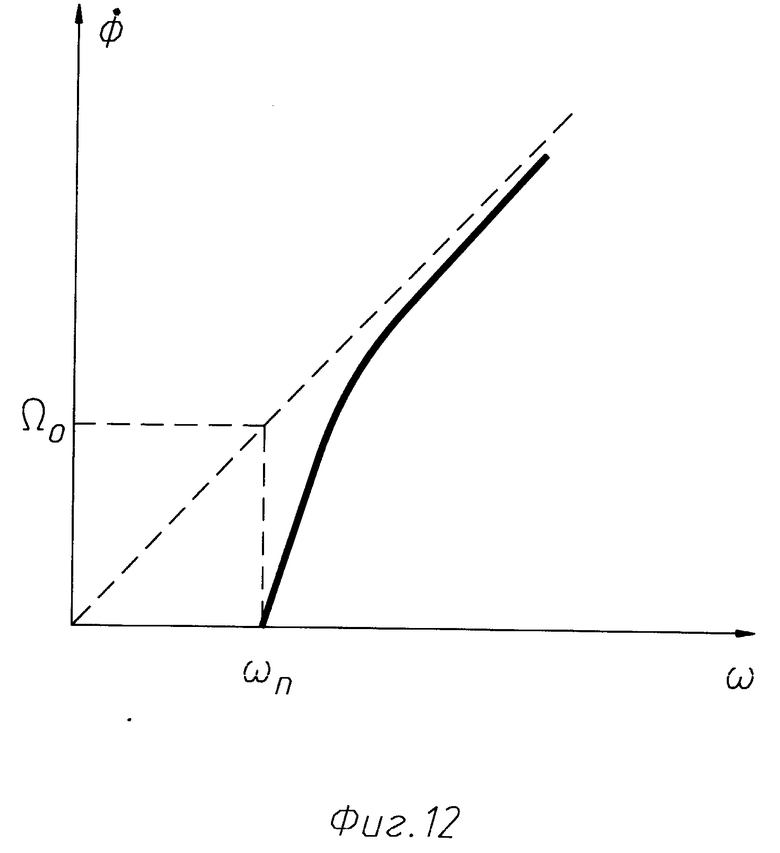
относительно основания и суммарной скорости вращения i-го КЛ относительно основания  , где ω - скорость крутильных колебаний i-го КЛ относительно платформы; на фиг.6 - временные диаграммы составляющих реактивных моментов Mpi(t), (i=1, 2, 3), направленные по оси вращения платформы и действующие со стороны колеблющихся КЛ на платформу; на фиг.7 - функциональная схема устройства, реализующего предлагаемый способ; на фиг.8 - ориентация осей трехгранников, связанных с осями чувствительности КЛi=1,2,3 - (i-0), с поворотной платформой - (i-1), с основанием измерителя - (i-2) (для всех перечисленных трехгранников i=1, 2, 3); на фиг. 9, 10 - примеры, конкретного выполнения блока управления 9 и входящих в его состав блоков синхронизации и подавления; на фиг.11 - пример конкретного выполнения алгоритма вычисления угловой ориентации и функциональной схемы вычислителя (эти примеры выполнения известны и описаны детально в литературе); на фиг.12 - статическая характеристика КЛ, поясняющая вывод формулы погрешности в приложении, здесь Ф - разность набегов фаз встречных волн КЛ; ωву - абсолютная угловая скорость вращения КЛ.
, где ω - скорость крутильных колебаний i-го КЛ относительно платформы; на фиг.6 - временные диаграммы составляющих реактивных моментов Mpi(t), (i=1, 2, 3), направленные по оси вращения платформы и действующие со стороны колеблющихся КЛ на платформу; на фиг.7 - функциональная схема устройства, реализующего предлагаемый способ; на фиг.8 - ориентация осей трехгранников, связанных с осями чувствительности КЛi=1,2,3 - (i-0), с поворотной платформой - (i-1), с основанием измерителя - (i-2) (для всех перечисленных трехгранников i=1, 2, 3); на фиг. 9, 10 - примеры, конкретного выполнения блока управления 9 и входящих в его состав блоков синхронизации и подавления; на фиг.11 - пример конкретного выполнения алгоритма вычисления угловой ориентации и функциональной схемы вычислителя (эти примеры выполнения известны и описаны детально в литературе); на фиг.12 - статическая характеристика КЛ, поясняющая вывод формулы погрешности в приложении, здесь Ф - разность набегов фаз встречных волн КЛ; ωву - абсолютная угловая скорость вращения КЛ.
Способ измерения угловой ориентации с первым и частным случаем выполнения режима возбуждения крутильных колебаний осуществляется следующим образом.
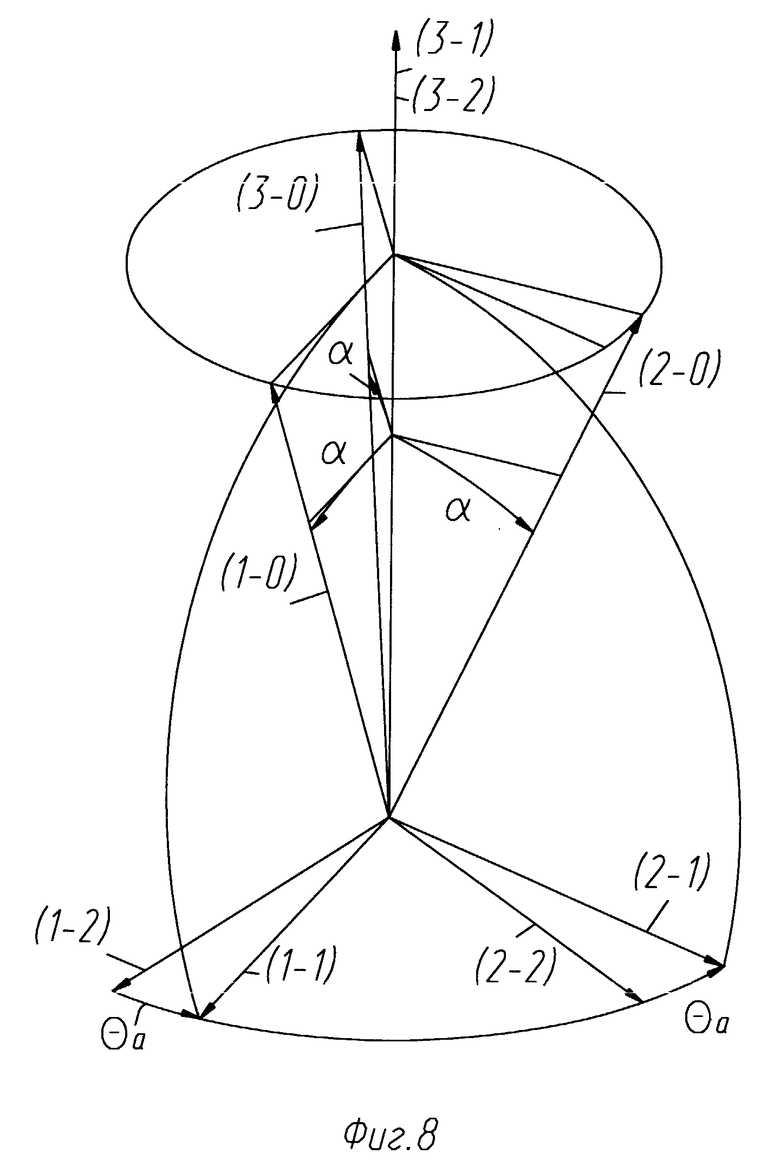
Предположим, что в начальный момент t=0 измерения положение системы координат, связанной с основанием измерительного устройства, и, соответственно, с осями чувствительности КЛi считается известным относительно опорной (стартовой) системы координат, т.е. считаем известным направляющие косинусы bi1-0, bi2-0, bi3-0(фиг. 8), определяющие ориентацию осей чувствительности КЛi (i=1, 2, 3) относительно опорной системы координат.
Известно, что в качестве опорной системы координат, например, для самолетов выбирается так называемая географическая система координат, а для космических объектов - инерциальная (звездная) система координат, а для космических объектов - инерциальная (звездная) система координат. Способ начальной выставки не является предметом данного изобретения, поэтому будем полагать, что выставка осуществляется известными способами (или с помощью специальных оптических средство по звездным ориентирам, или автономно по измеренным векторам абсолютной угловой скорости Земли и ускорения земного тяготения в точке стерта объекта, или с помощью наземных гиротеодолитов).
Положим также, что в начальный момент времени t=0 все КЛ неподвижны относительно платформы, а последняя вращается с постоянной угловой скоростью θa относительно основания, величина которой превышает максимально возможную скорость вращения объекта. Одновременно с вращением платформы измеряются угол поворота  относительно объекта (основания измерителя) и проекции абсолютной угловой скорости платформы по ортогональным осям
относительно объекта (основания измерителя) и проекции абсолютной угловой скорости платформы по ортогональным осям  , совпадающим с осями чувствительности КЛ. По измеряемым значениям угла поворота и проекций скоростей с помощью вычислителя одновременно осуществляется вычисление параметров угловой ориентации объекта, например углов крена, тангажа, рыскания.
, совпадающим с осями чувствительности КЛ. По измеряемым значениям угла поворота и проекций скоростей с помощью вычислителя одновременно осуществляется вычисление параметров угловой ориентации объекта, например углов крена, тангажа, рыскания.
Алгоритмы вычислений ориентации и функциональная схема вычислителя не являются предметом изобретения и считываются известными (например, [4]).
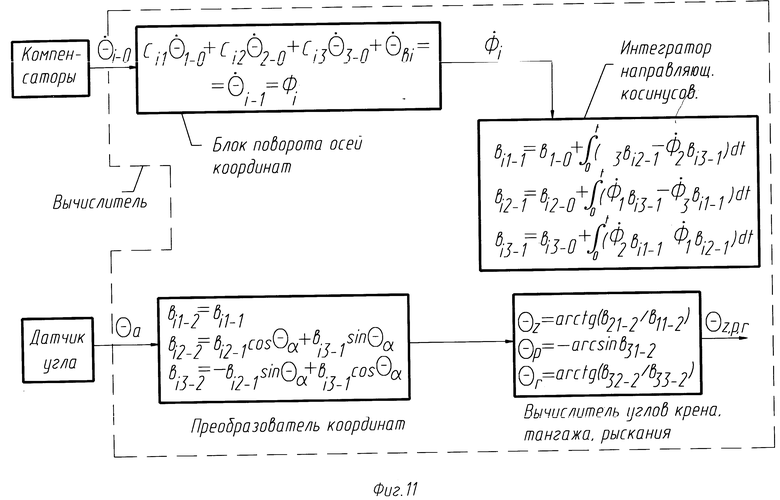
В соответствии с [4] в качестве примера конкретной технической реализации на фиг. 11 приведены алгоритмы вычислений ориентации для случая космического объекта, когда в качестве опорной выбрана инерциальная система координат. В частности, измеренные угловые скорости платформы относительно осей КЛ  преобразуются к ортогональной системе координат (i-1), связанной также с платформой, но одна из осей этой системы (3-1) направлена по оси вращения платформы (3-2).
преобразуются к ортогональной системе координат (i-1), связанной также с платформой, но одна из осей этой системы (3-1) направлена по оси вращения платформы (3-2).
Одновременно с этим преобразованием может осуществляться компенсация постоянных составляющих  сдвига нуля КЛ. По полученным таким образом угловым скоростям θa платформы в интеграле направляющих косинусов вычисляются значения направляющих косинусов Bi1-1, Bi2-1, Bi3-1 (i=1, 2, 3), затем по известному углу поворота θm платформы относительно основания вычисляются направляющие косинусы bi1-2, bi2-2, bi3-3, определяющие положение основания относительно опорной системы координат и, если это необходимо, по измеренным косинусам углы крена, тангажа и рыскания. После выполнения нескольких целых оборотов платформы, например двух, возбуждаются крутильные колебания КЛ относительно платформы (момент t2 на фиг. 4) с одинаковыми амплитудами ωвп , частотами π и относительным сдвигом по фазе 2
сдвига нуля КЛ. По полученным таким образом угловым скоростям θa платформы в интеграле направляющих косинусов вычисляются значения направляющих косинусов Bi1-1, Bi2-1, Bi3-1 (i=1, 2, 3), затем по известному углу поворота θm платформы относительно основания вычисляются направляющие косинусы bi1-2, bi2-2, bi3-3, определяющие положение основания относительно опорной системы координат и, если это необходимо, по измеренным косинусам углы крена, тангажа и рыскания. После выполнения нескольких целых оборотов платформы, например двух, возбуждаются крутильные колебания КЛ относительно платформы (момент t2 на фиг. 4) с одинаковыми амплитудами ωвп , частотами π и относительным сдвигом по фазе 2 /3.
/3.
Как будет показано ниже при таком законе возбуждения крутильных колебаний результирующий реактивный момент, действующий со стороны КЛ на платформу относительно ее оси вращения, будет равен нулю, что позволит обеспечить режим виброподставки при сопоставимых по величине моментах инерций платформы и КЛ. В процессе крутильных колебаний из составляющих угловых скоростей, измеряемых КЛ, вычитают соответствующие составляющие -ωву угловых скоростей относительно платформы. Вычисления ориентации, проводимые по вышеописанным алгоритмам, будут также определять текущие значения ориентации объекта, в том числе на интервале (t1, t2) переходного процесса установления колебаний КЛ.
В момент времени t2, после выхода на режим установившихся крутильных колебаний всех КЛ направление вращения платформы реверсируется, причем длительность переходного процесса (t3, t2) режима реверсирования скорости выбирается существенно больше (в 5-10 раз), чем в прототипе. После выхода на установившийся режим платформы со скоростью -ωву крутильных колебания КЛ относительно платформы на интервале (t4, t5) подавляются. Платформа поворачивается на целое число оборотов в обратном направлении. При этом вычисление ориентации платформы и объекта производится по вышеописанным алгоритмам как в установившемся режиме ((t0, t1), (t4, t5)), так и в процессе переходного режима на интервале (t1, t4). Аналогичный режим измерения осуществляется при повторном реверсе направления от _→ до ωву. Измерительный цикл периодически повторяется.
При описанном способе измерения снимается жесткое требование обеспечения режима "быстрого" реверса - быстрого прохождения зоны синхронизации КЛ за счет соответствующего режима вращения платформы, что, в свою очередь, позволяет уменьшить токи в двигателе в процессе реверса, соответственно уменьшить тепловыделение, погрешности КЛ и, соответственно, повысить точность определения угловой ориентации.
Проведенный анализ составляющей погрешности КЛ, обусловленной прохождением зоны синхронизации в описанном режиме (совмещения крутильных колебаний с "медленным" ускорением режима реверса направления вращения), показывает, что эта погрешность сопоставима по величине с соответствующей погрешностью при "быстром" прохождении зоны синхронизации (время реверса приблизительно в 5-10 раз меньше, чем в первом случае), как это осуществляется в прототипе в режиме реверса.
Описанный способ измерения с первой формой реализации одного из признаков улучшает характеристик прототипа, но полностью не устраняет рассмотренные недостатки прототипа. В самом деле, идеальное решение рассмотренной проблемы температурах погрешностей достигается при стремлении коэффициента неоднородности рассеиваемой мощности jn=Pm/Pву к нулю, что можно достигнуть при бесконечно большой длительности времени реверса [20].
Описанный вариант измерения далек от идеального, в части обеспечения режима jnωву0. Более того, он принципиально не позволяет воспользоваться другим, более радикальным путем уменьшения амплитуды рассеиваемой мощности Pm (и, соответственно, jn) за счет изменения установившейся скорости ωву вращения платформы, т. к. последняя зависит от скорости объекта. Отметим, например, что в соответствии с (5) уменьшение скорости вращения ωву в 10 раз приводит к уменьшению амплитуды рассеиваемой мощности в 100 раз.
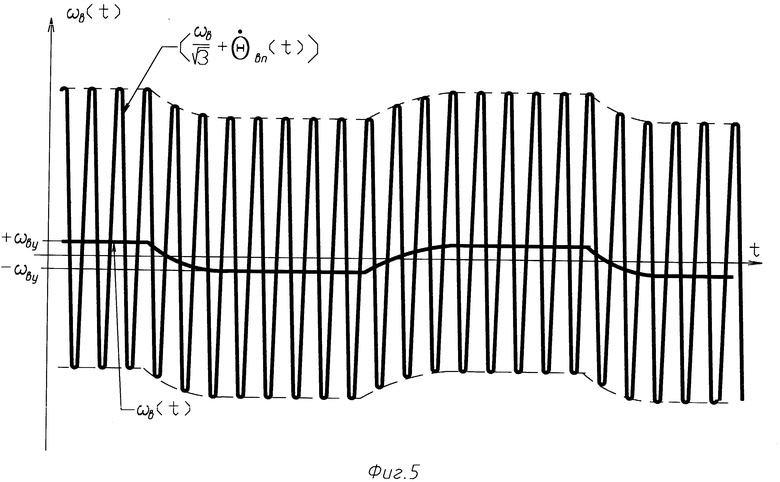
Кроме того, уменьшение скорости вращения платформы ωву = 5 град/c позволяет, соответственно, увеличить время вращения платформы в одном направлении и пойти на дальнейшее увеличение электромеханической постоянной tm (например, в 10-20) при сохранении одной и той же величины отношения длительности переходного процесса tпп к длительности полупериода реверса Tp/2. Во втором описанном частном случае выполнения признака способа измерения крутильные колебания КЛ относительно платформы возбуждают описанным образом в течении всего времени измерения, начиная с t=0 (см. фиг. 5), при этом скорость вращения платформы выбирают значительно меньшей скорости вращения объекта. Других особенностей способ измерения ориентации с указанным частным случаем выполнения не имеет по отношению к детально описанному способу с первой формой реализации признака (возбуждения крутильных колебаний).
Однако это отличие позволяет существенно снизить скорость вращения платформы и тем самым существенно уменьшить коэффициент неоднородности рассеиваемой мощности и температурные составляющие погрешностей КЛ. Скорость вращения в этом случае выбирается из условий обеспечения автокомпенсации погрешностей, для которого необходимо, чтобы время корреляции дрейфа КЛ было много больше периода реверсирования. Время корреляции дрейфа КЛ зависит от типа последнего и составляет величину от нескольких десятков минут до нескольких часов. Исходя из этого предпочтительную величину скорости вращения платформы следует выбирать из диапазона 0,1-10 град/с. Например, для σΩ период реверса составит Tp=288 с = 4,8 мин. Если при этом увеличить в 10 раз длительность переходного процесса при реверсировании, то в соответствии с (5) коэффициент неоднородности рассеиваемой мощности уменьшится по сравнению с прототипом в 1000 раз, что позволит практически исключить температурные погрешности, обусловленные нестационарными тепловыми процессами в КЛ.
В [18] показано, что в результате крутильных колебаний КЛ возникает погрешность измерения θm в виде случайного дрейфа по углу, возрастающему пропорционально квадратному корню из времени измерения t. Величина дрейфа зависит от амплитуды крутильных колебаний ωп , порога захвата  КЛ по угловой скорости и определяется выражением
КЛ по угловой скорости и определяется выражением
σΩ
где
σΩ - среднеквадратическое значение ошибки измерения по углу.
Для параметров конкретного типа КЛ, например фирмы Litton, с периметром резонатора 28 см погрешность  в соответствии с (7) имеет величину
в соответствии с (7) имеет величину
α
Оценить полную погрешность измерения для каждого из двух рассмотренных частных случаев не представляется возможным, поскольку эти погрешности зависят от характеристик конкретного КЛ, конструктивно-технологических особенностей его построения, которые, в частности, проявляются в степени чувствительности к тепловым возмущениям, способа обработки информации КЛ, конструктивной схемы всего устройств, от которой зависит интенсивность возмущающих факторов, действующих на КЛ. Выбор конкретного варианта измерения должен определяться из условия обеспечения минимальной погрешности измерения в процессе регулировки устройства и в ее зависимости от типа объекта (определяющего время измерения, рабочий ресурс измерителя, его надежность, характер внешних возмущений и т.д.).
Изложение сведений, подтверждающих возможность реализации устройства, следует начать с описания устройства-прототипа - устройства для измерения движения относительно нескольких осей. Устройство-прототип (фиг. 2) содержит одноосную поворотную платформу 1 с тремя взаимно ортогональными посадочными поверхностями, оси (i= 0), i-1, 2, 3, перпендикулярные упомянутые поверхностям, образуют равные углы с осью вращения платформы (3-1), КЛ 2, 3, 4 (не показано), исполнительный моментный двигатель 5 с усилителем мощности 6, электронный блок обратной связи 7, датчик угла 8, вычислитель 9, акселерометры 10 - 12 (не показано)
Предлагаемое устройство (фиг. 7) содержит поворотную платформу 1, кольцевые лазеры 2 - 4, исполнительный моментный двигатель 5, усилитель мощности со схемой реверса 6, датчик угла 7, трехфазный генератор 8, блок управления 9, схемы компенсации сигнала крутильных колебаний 10 - 12, датчики параметров крутильных колебаний 13 - 15, предусилители 16 - 18 датчиков параметров крутильных колебаний, датчики момента 19 - 21, торсионные виброподвесы 22 - 24, вычислитель 25.
Ориентация осей чувствительности КЛ (1-0), (2-0), (3-0), платформы (1-1), (2-1), (3-1) и основания устройства (1-2), (2-2), (3-2) показана на фиг. 8.
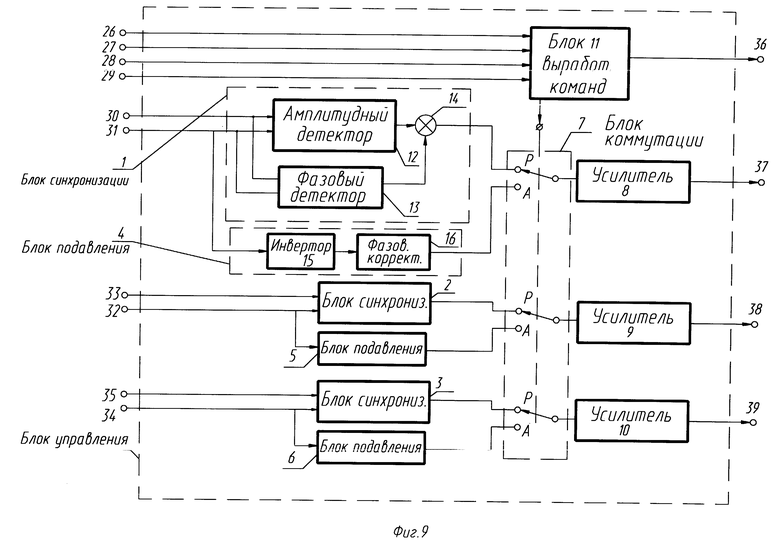
Блок управления 9 содержит (фиг. 9, 10) блоки синхронизации крутильных колебаний 1 - 3, блоки подавления колебаний 4 - 6, блок коммутации 7, усилители мощности 8 - 10, блок выработки команд 11, при этом каждой блок синхронизации содержит амплитудный детектор 12, фазовый детектор 13, схему суммирования сигналов 14, а каждый блок подавления содержит усилитель инвертор 15 и схему фазовой коррекции 16.
На фиг. 17 представлены также примеры конкретного выполнения отдельных элементов устройства.
Каждый из торсионных подвесов 22, 23, 24 (фиг. 7) выполнен в виде цельнометаллического узла и содержит центральный и внешний элементы цилиндрической формы, связанные радиально направленными ступицами-пружинами. Каждый из КЛ 2, 3, 4 выполнен по любой известной конструктивной схеме и содержит цилиндрическую полость, в которой установлен торсион, причем внешний элемент торсиона жестко связан с корпусом КЛ, а внутренний - с платформой 1. В качестве примера выполнения датчиков параметров крутильных колебаний 13 - 15 и датчиков момента 19 - 21 на фиг. 7 указаны известные пьезокерамические преобразователи биморфного типа, закрепленные на ступицах торсионов [13, 14].
Известно много детальных описаний (например, [15]) конкретного выполнения КЛ с торсионным подвесом и датчиками колебаний и момента, поэтому эти элементы изображены на фиг. 7 условно.
Следует отметить также, что поворотная платформа 1 на фиг. 7, как и фиг. 2, содержит три взаимно ортогональные посадочные поверхности, на которых жестко закреплены центральные части торсионов, причем оси чувствительности трех КЛ совпадают с соответствующими осями ортогонального трехгранника (1-0), (2-0), (3-0), образующими, в свою очередь, равные углы  с осью (3-1) вращения платформы (на фиг. 7) платформа изображена условно).
с осью (3-1) вращения платформы (на фиг. 7) платформа изображена условно).
В качестве примера выполнения компенсатора виброподставки на фиг. 7 указан электронный компенсатор (например, [16, 17]). В функциональном отношении он представляет устройство вычитания двух сигналов.
Вычислитель 25 может быть выполнен аналогично известному [4]. Пример его конкретного выполнения представлен на фиг. 11, на которой использованы следующие обозначения: - проекции абсолютной угловой скорости платформы на ортогональные оси, ориентированные по осям чувствительности КЛ;
- проекции абсолютной угловой скорости платформы на ортогональные оси, ориентированные по осям чувствительности КЛ; - проекции абсолютной угловой скорости платформы на ортогональные оси (i-1), связанные с платформой, одна из которых (3-1) ориентирована по оси вращения платформы (3-2);
- проекции абсолютной угловой скорости платформы на ортогональные оси (i-1), связанные с платформой, одна из которых (3-1) ориентирована по оси вращения платформы (3-2);
Cij - коэффициент преобразования от i-ой оси КЛ к j-й оси платформы, эти коэффициенты включают коррекцию масштабных коэффициентов КЛ;
θa - коррекция смещения нуля КЛ, приведения к i-й оси платформы;
bij-m - направляющие косинусы m-го элемента; m=1 - платформа; m=2 - основание устройства; i относится к опорной (инерциальной) системе координат; j относится к осям, связанным с вышеуказанным элементом (i=1, 2, 3);
bij-0-начальное значение направляющих косинусов, определяемое в процессе начальной выставки;
θP,θR,θr - угол поворота платформы относительно основания;
ωву - углы тангажа, крена, рыскания.
В качестве примера выполнения исполнительного двигателя 5 на фиг. 7 условно показан бесколлекторный моментный двигатель постоянного тока [22], в котором реверсирование скорости осуществляется изменением направления тока и последовательностью подключения рабочих обмоток.
Для достижения поставленной задачи здесь могут быть использованы и другие варианты выполнения описанных функциональных элементов, известных в технике лазерной гироскопии.
Устройство работает следующим образом.
В установившемся режиме (фиг. 7, 9) платформа 1 вращается двигателем 5 с постоянной угловой скоростью  , большей максимальной угловой скорости объекта. При этом ключи коммутатора 7 (фиг. 9) находятся в положении A (арретирование), блоки подавления 4 - 6 подключены к усилителям мощности 8 - 10, замыкая цепи отрицательной обратной связи между датчиками колебаний 13 - 15 и датчиками момента 19 - 21 (цепи блоков синхронизации 1 - 3 разомкнуты). В этом случае моменты, развиваемые упомянутыми датчиками, будут подавлять колебания КЛ в полосе пропускания торсионных виброподвесов (колебания на других частотах подавляются торсионами), КЛ 2, 3, 4 будет находится в "заарретированном" положении относительно платформы и вращаться с ней как одно целое.
, большей максимальной угловой скорости объекта. При этом ключи коммутатора 7 (фиг. 9) находятся в положении A (арретирование), блоки подавления 4 - 6 подключены к усилителям мощности 8 - 10, замыкая цепи отрицательной обратной связи между датчиками колебаний 13 - 15 и датчиками момента 19 - 21 (цепи блоков синхронизации 1 - 3 разомкнуты). В этом случае моменты, развиваемые упомянутыми датчиками, будут подавлять колебания КЛ в полосе пропускания торсионных виброподвесов (колебания на других частотах подавляются торсионами), КЛ 2, 3, 4 будет находится в "заарретированном" положении относительно платформы и вращаться с ней как одно целое.
При этом выходные сигналы с датчиков колебаний 13 - 15 равны нулю, на вход компенсаторов 10, 11, 12 поступают сигналы с выходов соответствующих КЛ 2, 3, 4. Так как компенсаторы 10, 11, 12 осуществляют операцию вычитания "сигнала виброподставки" ωкл(t) из сигнала  , то выходные сигналы соответствующих компенсаторов будут пропорциональны угловым скоростям платформы
, то выходные сигналы соответствующих компенсаторов будут пропорциональны угловым скоростям платформы  в инерциальном пространстве.
в инерциальном пространстве.
Как и в прототипе, θa , совместно с сигналом θa с датчика угла 7 поступают в вычислительное устройство 25, в котором по известным алгоритмам, описанным выше, вычисляются параметры угловой ориентации объекта, а при использовании акселерометров - навигационные параметры.
После поворота платформы 1 на величину заранее установленного угла поворота, например 720o, блок выработки команд 11 (фиг.9) переводит ключи блока коммутации 7 в положение "Р", отключает блоки подавления 4-6 и тем самым "разарретирует" торсионные виброподвесы КЛ.
Блок выработки команд 11 сравнивает с заданным значением текущее значение относительного угла поворота платформы  , которое подается от датчика угла 7 через полюс 29 блока 9, или текущее значение абсолютного угла поворота платформы в инерциальном пространстве, вычисляемого по показаниям КЛ, причем выбор относительно или абсолютного значений угла поворота может проводится как в процессе заводской настройки, так и в процесс эксплуатации. Пример конкретного выполнения блока выработки команд детально описан в прототипе и показан на фиг. 2. Фазы напряжений трехфазного генератора 8 (фиг.7)
, которое подается от датчика угла 7 через полюс 29 блока 9, или текущее значение абсолютного угла поворота платформы в инерциальном пространстве, вычисляемого по показаниям КЛ, причем выбор относительно или абсолютного значений угла поворота может проводится как в процессе заводской настройки, так и в процесс эксплуатации. Пример конкретного выполнения блока выработки команд детально описан в прототипе и показан на фиг. 2. Фазы напряжений трехфазного генератора 8 (фиг.7)
ωвп
через полюсы 31, 33, 35 блока управления 9 подаются на первые входы соответствующих блоков синхронизации 1, 2, 3 (фиг.9). Частота  напряжений UA, UB, UC выбирается по величине, близкой к резонансной частоте виброподвесов, и лежит в полосе пропускания виброподвеса.
напряжений UA, UB, UC выбирается по величине, близкой к резонансной частоте виброподвесов, и лежит в полосе пропускания виброподвеса.
Под воздействием указанных напряжений UA, UB, UC датчики момента вызовут крутильные колебания КЛ относительно платформы 1. Сигналы, пропорциональные параметрам крутильных колебаний, например угловой скорости  через предусилители 16 - 18 (фиг.7), и полюса 30, 32, 34 блоки подавления 9 поступают на вторые входы блоков синхронизации 1, 2, 3 (фиг.9, 10). Каждый из указанных блоков синхронизации вырабатывает сигнал ошибки, пропорциональный рассогласованию по амплитуде и фазе между сигналами на его входе, причем весовые коэффициенты суммирования в сумматорах 14 блоков синхронизации выбираются таким образом, чтобы в установившемся режиме все КЛ совершали крутильные колебания с одинаковыми амплитудами и относительным сдвигом по фазе на
через предусилители 16 - 18 (фиг.7), и полюса 30, 32, 34 блоки подавления 9 поступают на вторые входы блоков синхронизации 1, 2, 3 (фиг.9, 10). Каждый из указанных блоков синхронизации вырабатывает сигнал ошибки, пропорциональный рассогласованию по амплитуде и фазе между сигналами на его входе, причем весовые коэффициенты суммирования в сумматорах 14 блоков синхронизации выбираются таким образом, чтобы в установившемся режиме все КЛ совершали крутильные колебания с одинаковыми амплитудами и относительным сдвигом по фазе на 

При этом реактивные моменты Mp, действующие со стороны колеблющихся КЛ 2, 3, 4 на подвижную платную платформу 1, изменяются по закону
где
Mm= Cθвп , а C - жесткость торсиона. Составляющая результирующего реактивного момента MΣR по оси вращения платформы (3-1), равная сумме проекций реактивных моментов M1,2,3 (t) всех КЛ на ось (3-1), равна нулю (см. фиг.6)
MΣR = (Mp2(t)+Mp3(t)+Mp4(t)cosα = 0,
где
α - угол между осью вращения платформы и осями (i-0) виброподвесов КЛ, а составляющие реактивных моментов в плоскости, ортогональной оси вращения (3-1), уравновешиваются реакцией в опорах платформы.
Таким образом, в предлагаемом устройстве решается проблема обеспечения необходимых параметров крутильных колебаний КЛ независимо от соотношения между моментом инерции КЛ Iкл и платформы Iпл относительно оси ее вращения, т. е. не требуется выполнения условия Iпл >> Iкл, приводящего к значительному увеличению массы и габаритов устройства.
После выхода на режим установившихся крутильных колебаний КЛ 2, 3, 4 блок управления 9 выдает команду (в момент t2 фиг.4) на схему реверса 6, которая осуществляет реверс направлением вращения, например изменением полярности управляющего двигателем напряжения Uy. Время tвоз. приближенно отношением добротности Q виброподвеса к его резонансной частоте f0: tвоз.= Q/f0. Для торсионных виброподвесов с типичными параметрами Q=200; f0=400Гц оно может составлять несколько десятых долей секунды, если не предпринимать специальных мер по его уменьшению. Поскольку в режиме реверсирования направления все КЛ совершают крутильные колебания относительно платформы, снимается требование по жесткому ограничению времени реверсирования вращения платформы. Это, в свою очередь, позволяет уменьшить ток (момент двигателя) и, соответственно, тепловыделение в двигателе. На фиг.4 представлены временные диаграммы для скорости платформы в режиме реверсирования, причем в качестве примера время реверсирования увеличено в 4 раза по сравнению с постоянной Tm прототипа. Последнее, в частности, снижает амплитуду импульса рассеиваемой мощности в двигателе в 4 раза (5).
Временной масштаб на фиг. 3 и 4 одинаков.
Энергопотребление датчиков момента торсионов имеет величину прядка 0,1 Вт и пренебрежимо мало по сравнению с амплитудой импульса Pm рассеиваемой двигателем мощности в режиме реверса (Pm=150 Вт).
В режиме реверса на входы компенсаторов 10 - 12 поступают сигналы с выходов соответствующих КЛ и датчиков виброподставки 13 - 15, а с выходов компенсаторов снимаются сигналы, пропорциональные угловым скоростям платформы  в инерциальном пространстве.
в инерциальном пространстве.
Следует подчеркнуть, что в предлагаемом устройстве снижаются требования по быстродействию к вычислителю, поскольку скорость изменения скорости (ускорения) платформы в режиме реверса в несколько раз (в выбранном примере реализации в 4 раза) меньше ускорения платформы в режиме реверса устройства прототипа.
После выхода на установившийся режим вращения платформы с угловой скоростью -ωвр.у (точка t3 на фиг.4) по команде с блока выработки команд 11 (фиг. 9) ключи коммутатора 7 устанавливаются в положении "А", усилители 8 - 10 датчиков момента 19-21 подключаются к выходам блоков подавления 4 - 6, формирующих сигнал отрицательной обратной связи (в простейшем случае по скорости  ), под действием которых колебания КЛ относительно платформы подавляются и последние устанавливаются в "заарретированное" положение относительно платформы 1. Платформа поворачивается на заданное число полных оборотов, причем в процессе этого вращения измерение осуществляется точно таким образом, как и в вышеописанном случае вращения с установившейся скоростью +ωву .
), под действием которых колебания КЛ относительно платформы подавляются и последние устанавливаются в "заарретированное" положение относительно платформы 1. Платформа поворачивается на заданное число полных оборотов, причем в процессе этого вращения измерение осуществляется точно таким образом, как и в вышеописанном случае вращения с установившейся скоростью +ωву .
После выполнения программного числа оборотов по команде с блока выработки команд 11 аналогично вышеописанному осуществляется режим реверсирования скорости от -ωву до +ωву и измерение (скорости вращения платформы) в режиме установившейся скорости вращения на заданное число полных оборотов, затем описанный рабочий цикл периодически повторяется.
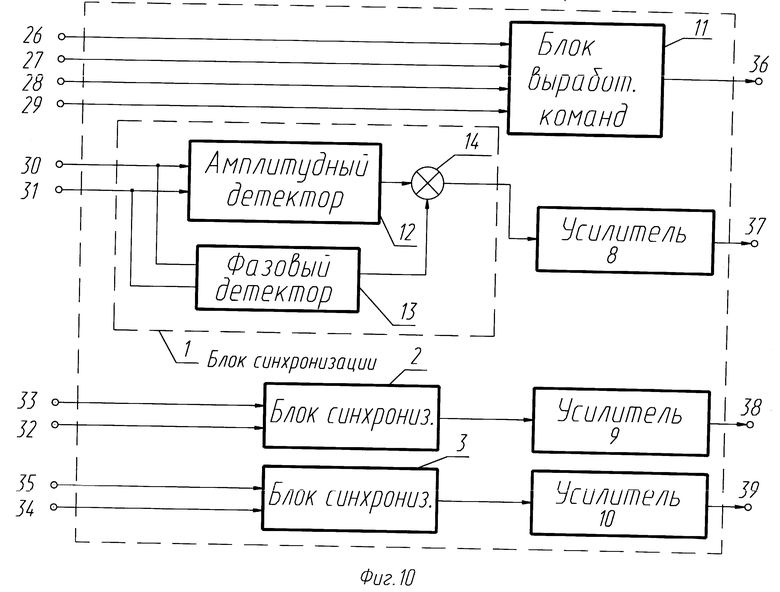
Другой частный случай выполнения блока управления, представленный на фиг. 10, позволяет реализовать вышеописанный пример выполнения способа измерения при использовании крутильных колебаний КЛ, возбуждаемых непрерывно в течение всего времени измерения. Единственная особенность работы устройства в этом случае заключается в том, что блоки синхронизации 1 - 3 блока управления (фиг. 10) связаны с датчиками момента 19 - 21 (фиг.7) в течение всего времени измерения, обеспечивая описанный режим крутильных колебаний КЛ.
Таким образом, повышение точности измерения в данном устройстве достигается за счет снижения интенсивности источника температурных погрешностей, а увеличение рабочего ресурса за счет снижения токов двигателя (и напряжения на коммутирующих элементах) в режиме реверса и соответствующего увеличения числа допустимых циклов реверса.
Приложение
Погрешность КЛ при ускоренном прохождении статической зоны синхронизации (СЗС).
В изложении будем следовать [19].
Исследуем погрешность измерения при прохождении рабочей точки КЛ через СЗС по закону  , где ωп - порог чувствительности КЛ, рад/с;
, где ωп - порог чувствительности КЛ, рад/с;  - ускорение прохождения, рад/с2 (направлено по оси чувствительности КЛ);
- ускорение прохождения, рад/с2 (направлено по оси чувствительности КЛ);
Уравнение для разности фаз Ф КЛ (в стационарном режиме по интенсивности встречных воле [1]: ,
,
где  - безразмерный МК; Ωo= Kклωп , рад/с.
- безразмерный МК; Ωo= Kклωп , рад/с.
Время Δ пребывания рабочей точки в области СЗС
Скорость прохождения СЗС характеризуем безразмерным параметром
Условие "быстрого" прохождения: β >1. Решение (п.1) ищем, следуя [19].
Дифференцируя (п.1), имеем
с нулевыми начальными условиями  .
.
решение (п. 2) ищем в виде Φ(t) = φ(t)+ψ(t) , где φ(t) удовлетворяет укороченному уравнению
В [19] показано, что  при β >1, поэтому в дальнейшем
при β >1, поэтому в дальнейшем  .
.
Решение (п.3) .
.
Сравнивая (п.4) с решением уравнения для идеального КЛ ,
,
запишем для погрешности измерения Δφ при однократном прохождении СЗС .
.
Если считать, что φo является случайной величиной с равномерной плотностью  , то математическое ожидание MΔφ[Δφ] = 0 , а среднеквадратическое значение погрешности
, то математическое ожидание MΔφ[Δφ] = 0 , а среднеквадратическое значение погрешности  из п.5 будет
из п.5 будет ,
,
или приведенная к входу КЛ ,
,
где
σΔθ - среднеквадратическое значение погрешности по углу, рад. Учитывая что при электромагнитном реверсе направления вращения платформы ускорение  в области нулевой скорости можно представить в виде
в области нулевой скорости можно представить в виде  , получим окончательно выражение для погрешности при однократном прохождении СЗС
, получим окончательно выражение для погрешности при однократном прохождении СЗС ,
,
где
Tм - электромеханическая постоянная времени электропривода;
ωву - установившаяся скорость вращения платформы.
Отметим, что выражение (п. 8) не учитывает погрешность, обусловленную нелинейности МК в области малых скоростей
При N-кратном прохождении СЗС вполне обосновано считать погрешности независимыми, поэтому среднеквадратичное значение накопленной за N проходов погрешности σθ можно записать .
.
Источники информации.
1. Ф. Ароновиц. Лазерные гироскопы. Применение лазеров. М.: Мир, с. 182-269.
2. Патент США N 3373650, кл. 366-106.
3. Патент США N 4710027, кл. 356-106.
4. Патент США N 4017187, кл. 356-106.
5. Патент США N 3575093, кл. 74/534.
6. Liang A.C., Klichbob D.L. "Titan IIIc Space navigation use Carousel 5B IMU". AIAA. Guidiance and Control Conference, 1973, paper AIAA N 73-905.
7. E. Oshika, A. Perziale. "IEEE 1976 Position Location and Navig. Sympos. San Diego, Calif., 1976", N.Y., 1976, p. 106-115.
8. H. I. Engebretson. System Concepts Using Ring Laser Gyros. IEEE 1980 Position Lacation and Navig. Sympos., Atlantic City, 1980, p. 244-249.
9. Патент США N 3563662, кл. 356-106.
10. J. D. Coccoli. S.B. Helfant. The Intinsic Stability of Laser-gyro scale factor, IEEE Nation. Aerosp. and Electr. Conference NAECON-78", 1978, v. 2, p. 574-582.
Авторское свидетельство СССР N 204456, кл. H 01 S 3/08.
12. A. Matthews, Welter Cost-Effective High-Accuracy Inertial Navigation. Navigation, v. 36, N 2, 1989.
13. Заявка Франции N 8207511, кл. G 01 C 19/64.
14. Патент США N 4988908, кл. 310/331.
15. Патент США N 4445779, кл. 356/350.
16. Патент США N 5048963, кл. 356/350.
17. Заявка PCT/US87/03305, кл. G 01 C 19/64.
18. Seridan W. Hammons, Val. S. Ashby. Mechanically Dithered RLG at the Quantum Limit. IEEE NAECON 1982, v. 1, p. 388-392.
19. В.Ф. Судаков. Оптика и спектроскопия, т. 40, 1976, с. 190-192.
20. Ю.А. Сабинин и др. Электромашинные устройства автоматики. М.: 1988.
21. Брускин Д.Э. и др. Электрические машины и микромашины. М.: 1990.
22. Столов Л.И. и др. Авиационные моментные двигатели. М.: 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ГИРОСКОП С КОМПЕНСАЦИЕЙ СОСТАВЛЯЮЩЕЙ, ВНОСИМОЙ ВИБРОПОДСТАВКОЙ | 2015 |
|
RU2613043C1 |
| Устройство для настройки датчика угловых скоростей лазерного | 2020 |
|
RU2737027C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ДИНАМИЧЕСКИЙ ГИРОКОМПАС | 2020 |
|
RU2754964C1 |
| ВИБРОПОДВЕС ДЛЯ МАЛОГАБАРИТНОГО ЛАЗЕРНОГО ГИРОСКОПА | 1997 |
|
RU2128823C1 |
| Способ компенсации движения виброподставки лазерного гироскопа и устройство для его реализации | 2020 |
|
RU2783617C1 |
| Способ определения углов ориентации ЛА на вертикальных траекториях полета | 2017 |
|
RU2671291C1 |
| Способ оценки систематических дрейфов трехосного лазерного гироскопа с виброподставкой | 2019 |
|
RU2748030C1 |
| Способ повышения точности калибровки блока микромеханических датчиков угловой скорости | 2019 |
|
RU2727344C1 |
| Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС | 2019 |
|
RU2718142C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |

Изобретение предназначено для использования в инерциальных навигационных системах. Способ включает периодически реверсируемое вращение платформы относительно оси, жестко связанной с объектом и образующей равные углы с осями чувствительности всех кольцевых лазеров. Одновременно измеряют проекции абсолютной угловой скорости по осям чувствительности кольцевых лазеров и измеряют угол поворота платформы относительно объекта. При этом дополнительно возбуждают крутильные гармонические колебания кольцевых лазеров относительно поворотной платформы с одинаковыми амплитудами и частотами и взаимным фазовым сдвигом 2π/3 . Одновременно вычитают из измеренных значений проекций угловой скорости составляющие, равные угловым скоростям упомянутых колебаний соответствующих кольцевых лазеров. Вычисляют текущие значения пространственной угловой ориентации объекта. Лазерный измеритель содержит одноосную поворотную платформу с тремя кольцевыми лазерами, оси чувствительности которых взаимно ортогональны и образуют равные углы с осью вращения платформы, исполнительный двигатель со схемой реверса направления вращения, блок управления, связанный через схему реверса с исполнительным двигателем, вычислитель, трехфазный генератор. Каждый кольцевой лазер снабжен торсионным виброподвесом, через который он связан с платформой, датчиком момента, датчиком крутильных колебаний и схемой компенсации. Обеспечивается повышение точности измерения и увеличение рабочего ресурса. 2 с. и 5 з.п.ф-лы, 12 ил.