Изобретение относится к принудительному управлению согласно ограничительной части пункта 1 формулы изобретения. Обычные автомобили-тягачи содержат сцепное устройство, например сцепную цапфу или сцепной шар, предусмотренные для прикрепления тяги автоприцепа и для передачи тяговых усилий автомобиля-тягача на автоприцеп. Для принудительного управления поворотом принудительно управляемых колес или осей наряду со сцепным устройством автомобиля-тягача предусмотрено направляющее устройство для создания первого места шарнирного соединения. Это направляющее устройство может быть также выполнено, например, в виде цапфы или шара и называться при этом управляющей цапфой или управляющим шаром.
Когда автопоезд из автомобиля с автоприцепом идут на поворот, направляющее устройство стационарно движется вместе с автомобилем-тягачом и при этом изменяет положение относительно автоприцепа. При этом между автомобилем-тягачом и автоприцепом образуется угол, в частности, изменяемый во время движения. Этот угол равен 0° при движении в прямом направлении и 90°, если автомобиль-тягач устанавливается в направлении поперек автоприцепа, в частности плюс или минус 90° при обычном направлении поворота. Этот изменяемый угол между автомобилем-тягачом и автоприцепом используется при принудительном управлении принудительно управляемыми колесами. Для этого обычно на направляющем устройстве крепится цилиндр принудительного управления, выдвигаемый и вдвигаемый для принудительного управления в соответствии с углом между автомобилем-тягачом и автоприцепом. При этом цилиндр принудительного управления обычно перемещает гидравлическую жидкость, функционально соединенную по меньшей мере с одним рабочим цилиндром управляемых осей автоприцепа. Посредством гидравлической жидкости цилиндр принудительного управления воздействует на положение рабочего цилиндра, или рабочих цилиндров, и тем самым вызывает отклонение управляемых колес по меньшей мере одной оси автоприцепа, причем эти колеса являются принудительно управляемыми. При этом недостаток состоит в том, что цилиндр принудительного управления требует много места и имеет большой вес. В частности, если автоприцеп прицепляется и отцепляется часто, то затраты на установку принудительного управления оказываются большими. Кроме того, цилиндр принудительного управления может существенно ограничивать максимально возможный угол между автомобилем-тягачом и автоприцепом, в частности, из-за того, что цилиндр принудительного управления требует много места, причем необходимо предотвратить возможность сталкивания цилиндра принудительного управления каким-либо местом с каким-либо элементом автомобиля-тягача или автоприцепа.
Поэтому задачей изобретения является создание принудительного управления вышеупомянутого типа, с помощью которого могли бы быть устранены указанные недостатки, которое могло бы быть надежным, безотказным, устойчивым против загрязнения, а также могло бы быстро и просто монтироваться на автоприцепе и демонтироваться с него и с помощью которого максимальный угол между автомобилем-тягачом и автоприцепом по сравнению с автоприцепом без системы принудительного управления был бы не ограничен.
Согласно изобретению это достигается с помощью признаков пункта 1 формулы изобретения.
В результате преимущество заключается в том, что геометрия системы принудительного управления может быть выполнена существенно более гибкой. При этом предпочтительно, чтобы благодаря этому потребность системы принудительного управления в месте по меньшей мере в области, предусмотренной для монтажа на автомобиле-тягаче, могла быть существенно сокращена, вследствие чего в геометрии системы принудительного управления могли бы успешнее разрешаться пространственные проблемы между автомобилем-тягачом и автоприцепом. При этом предпочтительно, чтобы максимально возможный угол между автомобилем-тягачом и автоприцепом по сравнению с максимально возможным углом между автомобилем-тягачом и автоприцепом без принудительного управления не был ограничен, т.е. по существу мог быть выполнен таким же. При этом предпочтительным образом может быть обеспечен незначительный круг (траектория) поворота автопоезда.
Кроме того, из этого следует то преимущество, что элементы управления, в частности первый элемент управления, могут быть выполнены меньшего веса. При этом предпочтительно, чтобы монтаж и демонтаж первого элемента управления мог осуществляться просто и без особых затрат усилий на направляющем устройстве автомобиля-тягача, образующем первое место шарнирного соединения. При этом автоприцеп предпочтительно может подсоединяться к автомобилю-тягачу или отсоединяться от автомобиля-тягача за короткое время. Это, в частности, является преимуществом при частой смене автомобиля-тягача и/или автоприцепа.
Из этого следует также то преимущество, что система принудительного управления может быть выполнена надежной, безотказной и устойчивой против загрязнения. При этом предпочтительно, чтобы система принудительного управления могла быть выполнена непритязательной для обслуживания, причем чтобы предпочтительная система принудительного управления, в частности обычный цилиндр принудительного управления, могла обслуживаться с меньшими затратами. При этом, в частности, второе место шарнирного соединения может быть предусмотрено в защищенном от загрязнения месте автоприцепа, причем элементы системы принудительного управления, подверженные загрязнению, в частности, могут быть установлены в области второго места шарнирного соединения и тем самым лучше защищены от грязи. Зависимые пункты формулы изобретения, которые так же, как и пункт 1 формулы изобретения, одновременно составляют часть описания, относятся к другим предпочтительным вариантам выполнения изобретения.
При этом
на фиг. 1 изображен вид сбоку второго элемента управления принудительного управления в первом предпочтительном варианте выполнения и тяги автоприцепа;
на фиг. 2 - вид сверху принудительного управления на фиг. 1 и тяги на фиг. 1;
на фиг. 3 - вид сверху первого бака для жидкости, показанного открытым и схематично;
на фиг. 4 - вид сверху первого бака для жидкости на фиг 3, показанного закрытым;
на фиг. 5 - вид сверху первого и второго элементов управления и тяги на фиг. 2, причем первый и второй элементы управления установлены согласно движению автомобиля-тягача и автоприцепа по прямой;
на фиг. 6 - схематический вид сверху деталей на фиг. 5, причем первый и второй элементы управления установлены согласно движению автомобиля-тягача и автоприцепа по кривой вправо;
на фиг. 7 - схематический вид сверху деталей на фиг. 5, причем первый и второй элементы управления установлены согласно движению автомобиля-тягача и автоприцепа по кривой влево;
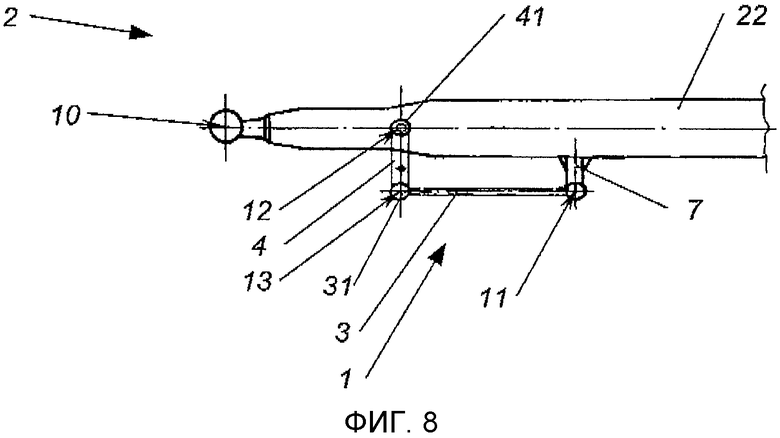
на фиг. 8 - вид сверху деталей на фиг. 5, причем первое шарнирное устройство зафиксировано на первом фиксирующем элементе;
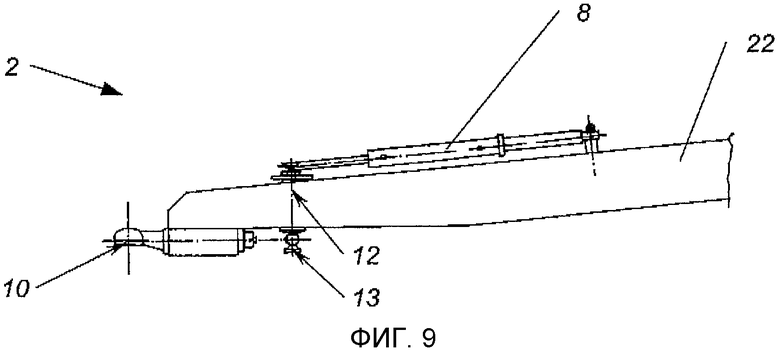
на фиг. 9 - вид сбоку тяги на фиг. 1 и второго элемента управления принудительного управления, а также цилиндра-датчика, соединенного со вторым элементом управления, в предпочтительном третьем варианте выполнения принудительного управления;
на фиг. 10 - вид сбоку тяги на фиг. 1 и второго элемента управления принудительного управления, а также цилиндра-датчика, соединенного со вторым элементом управления, в предпочтительном четвертом варианте выполнения принудительного управления;
на фиг. 11 - вид спереди второго элемента управления на фиг. 10; и
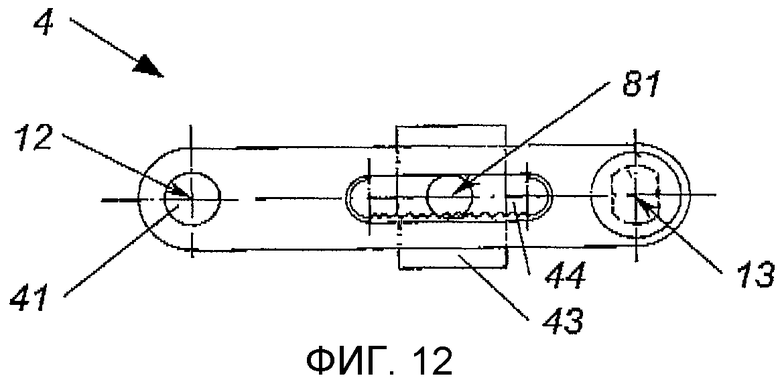
на фиг. 12 - вид сверху второго элемента управления на фиг. 10.
В описании используется понятие механические сигналы для отличия от оптических и электрических сигналов, при этом понятие механические сигналы включает в себя сигналы, передаваемые посредством жидкостей.
На фиг. 1-12 изображены по меньшей мере элементы принудительного управления 1 для управления автоприцепом 2, сцепленным с автомобилем-тягачом, с первым местом 11 шарнирного соединения, являющимся неподвижным относительно автомобиля-тягача, со вторым местом 12 шарнирного соединения, неподвижным относительно автоприцепа 2, причем первый элемент 3 управления содержит первое шарнирное устройство 31 для воздействия на первое место 11 шарнирного соединения. Для компактной установки принудительного управления 1, для надежного, безотказного и устойчивого против загрязнения выполнения, а также для того, чтобы принудительное управление быстро и просто монтировалось на автомобиле-тягаче и демонтировалось с автомобиля-тягача, предлагается, чтобы первый элемент 3 управления соединялся со вторым элементом 4 управления на первом постоянном расстоянии от первого шарнирного устройства 31 с возможностью поворота с образованием центра 13 поворота и чтобы второй элемент 4 управления содержал на втором постоянном расстоянии от центра 13 поворота второе шарнирное устройство 41 для воздействия на второе место 12 шарнирного соединения.
При этом предпочтительно, чтобы эти элементы (компоненты) принудительного управления 1 были выполнены из стальных элементов и не были выполнены в виде гидроцилиндров. Этим обеспечиваются вышеупомянутые преимущества и предпочтительные воздействия.
Для создания автопоезда, содержащего автоприцеп 2 и автомобиль-тягач, автоприцеп 2 посредством тягово-сцепного устройства, в частности тяги 22 автоприцепа 2, присоединен к автомобилю-тягачу (сцеплен с ним). При этом между автомобилем-тягачом и автоприцепом 2 образуется угол, составляющий при движении по прямой 0°, а при расположении автомобиля-тягача в направлении поперек автоприцепа 2 плюс или минус 90°, причем обычное измерение угла предусмотрено по часовой стрелке.
Тяга 22 установлена на автоприцепе 2 неподвижно и, в частности, может привариваться и/или жестко свинчиваться с другими элементами, образующими автоприцеп 2. Таким образом, второе место 12 шарнирного соединения, являющееся неподвижным относительно автоприцепа 2, является также неподвижным относительно тяги 22 автоприцепа 2.
Тяга 22, как показано, может быть выполнена по существу прямой. Такая тяга 22 может быть названа дышлом. В частности, дышло может содержать трубу дышла и тем самым по меньшей мере местами быть выполнена полой.
В другом варианте выполнения автоприцепа 2 тяга 22 может быть выполнена V-образной, что, в частности, может иметь место в случае автоприцепа 2, выполненного в качестве тракторного прицепа. В этой связи тяга 22 может также называться V-образным дышлом.
Принудительное управление 1, которое может быть названо системой принудительного управления или устройством для принудительного управления, содержит при этом те элементы (компоненты), которые предусмотрены для принудительного управления поворотом принудительно управляемых колес. К тому же эти элементы при рассмотрении в порядке воздействия установлены между первым местом 11 шарнирного соединения и принудительно управляемыми колесами. При этом предпочтительно, чтобы принудительное управление 1 по существу содержало три узла. В первом узле угол между автомобилем-тягачом и автоприцепом 2 согласно задаваемой передаточной функции передается на участок, установленный неподвижно относительно автоприцепа 2, согласно изобретению на второе место 12 шарнирного соединения. При этом первый элемент 3 управления и второй элемент 4 управления обеспечивают по существу надежную передачу информации об угле от первого места 11 шарнирного соединения на второе место 12 шарнирного соединения.
Для этого первый элемент 3 управления и второй элемент 4 управления могут быть выполнены по существу пруткообразными, в частности, как показано, по существу вытянутыми в прямом направлении. В зависимости от наличия места между автомобилем-тягачом и автоприцепом 2 первый элемент 3 управления и/или второй элемент 4 управления могут иметь геометрию, отличную от прямолинейной геометрии. В частности, первый элемент 3 управления и/или второй элемент 4 управления могут быть s-образными, l-образными, уголковыми или иметь более сложную трехмерную геометрию.
Как показано на фиг. 5-7, в частности, может быть предусмотрено, что место 10 соединения, первое место 11 шарнирного соединения, центр 13 поворота и второе место 12 шарнирного соединения установлены по углам воображаемого четырехугольника. В частности, на виде сверху воображаемого четырехугольника, как показано, четыре точки могут участвовать в образовании четырехугольника и для приведения в действие принудительного управления 1 смещаться по существу, как в воображаемом параллелограмме. Этот воображаемый параллелограмм в виде сверху и в виде сверху автоприцепа 2 на фиг. 5, 6 и 7 схематически изображен с помощью штрихпунктирных линий. При этом положение первого элемента 3 управления и второго элемента 4 управления на фиг. 5 соответствует движению автопоезда по прямой. При этом положение первого элемента 3 управления и второго элемента 4 управления на фиг. 6 соответствует движению по кривой при правом повороте. При этом положение первого элемента 3 управления и второго элемента 4 управления на фиг. 5 соответствует движению по кривой при левом повороте. Для обеспечения перемещения согласно параллелограмму предусмотрено, что расстояние от второго места 12 шарнирного соединения до центра 13 поворота выбирается соответственно и равным расстоянию от места 10 соединения до первого места 11 шарнирного соединения. При этом, в частности, длина второго элемента 4 управления по существу может соответствовать расстоянию от места 10 соединения до первого места 11 шарнирного соединения, вследствие чего второй элемент 4 управления лишь незначительно длиннее линии, соединяющей второе место 12 шарнирного соединения и центр 13 поворота. При этом предпочтительным образом может быть предусмотрено, что воображаемый прямоугольник, образованный четырьмя точками, образован по существу в одной плоскости. Эта плоскость может быть определяться заранее. В частности, эта плоскость, которая может быть названа рабочей плоскостью первого узла, может быть установлена горизонтально, как показано, или вертикально. Эта рабочая плоскость может быть также наклонной плоскостью к горизонтальной или вертикальной плоскости.
При этом на участке второго места 12 шарнирного соединения происходит преобразование информации об угле в сигнал управления принудительно управляемыми колесами с помощью второго узла. При этом информация об угле, передаваемая, как описано выше, от первого узла ко второму месту шарнирного соединения, может преобразовываться в оптический сигнал, в электрический сигнал и/или в механический сигнал принудительного управления. При этом сигнал может называться сигналом принудительного управления. Механический сигнал, в частности, может выступать в виде давления, предпочтительно гидравлического давления, как это имеет место, например, в гидроцилиндрах.
В случае, если второй узел преобразует информацию об угле в электрический сигнал, второй узел может называться детектором 5. В случае, если второй блок преобразует информацию об угле в механический сигнал, второй узел может называться датчиком и может быть выполнен, например, в виде цилиндра-датчика 8 или первого бака 6 для жидкости.
Цилиндр-датчик 8 выполнен таким образом, что в результате линейного перемещения поршня цилиндра-датчика 8 перемещается текучая среда, в частности жидкость, в частности несжимаемая текучая среда. Цилиндр-датчик 8 схематически изображен на фиг. 9 и 10. Первый бак 6 для жидкости выполнен таким образом, что поворотное движение поршневого элемента 61 первого бака 6 для жидкости вызывает перемещение текучей среды. Первый бак 6 для жидкости схематически изображен на фиг. 3 и 4. В этом смысле первый бак 6 для жидкости и цилиндр-датчик 8 эквивалентны по действию. В усовершенствованном варианте выполнения принудительное управление 1 может включать в себя по меньшей мере один цилиндр-датчик 8 и по меньшей мере один первый бак 6 для жидкости.
В третьем узле принудительного управления 1 сигнал на поворот колес автоприцепа 2 передается по меньшей мере одному устройству для регулировки, в частности по меньшей мере одному рабочему цилиндру. При этом сигнал вызывает установку устройства для регулировки, которое может быть названо исполнительным органом, в задаваемое положение. Заданное положение устройства для регулировки, в свою очередь, вызывает заданный поворот принудительно управляемых колес автоприцепа 2. При этом предпочтительно, чтобы передаточная функция принудительного управления при этом могла изменяться особенно просто, в частности проще, чем это происходит в обычных системах принудительного управления.
Принудительно управляемые колеса предусмотрены по меньшей мере на одной управляемой оси. При этом сигнал может служить для управления 2, 4, 6 и более колесами. При этом понятие колесо включает в себя также так называемые сдвоенные или многократные колеса или шины, в которых две или более комбинаций шин и ободов комбинируются в сдвоенное или многократное колесо. Предпочтительным образом может быть предусмотрено, что для определения положения второго элемента 4 управления относительно второго места 12 шарнирного соединения предусмотрен детектор 5 и чтобы для поворота колес автоприцепа 2 детектор 5 был функционально соединен с устройством для регулировки. При этом электрический сигнал, формируемый детектором 5, может быть оптическим, электрическим или передаваться от детектора к устройству для регулировки по радиосвязи. Детектор 5, среди прочего, предусмотрен в первом варианте выполнения, изображенном на фиг. 1 и 2, причем функциональная связь при этом осуществлена посредством кабеля.
В частности, детектор 5 может быть жестко соединен со вторым шарнирным устройством 41. Предпочтительно, чтобы детекторы 5 могли быть особенно компактными, особенно удобными с особенно малым весом и особенно надежной конструкцией. Соответствующие детекторы 5, в числе прочего, могут определять положение второго элемента 4 управления относительно второго места 12 шарнирного соединения оптически с помощью мерной метки, магнитным способом, например, с помощью индукционных датчиков, путем регистрации изменения положения второго элемента 4 управления.
При этом устройство для регулировки должно снабжаться электрически током и/или механически, в частности, давлением с помощью пневматики и/или гидравлики, от автомобиля-тягача. При этом в соответствии с сигналом, принятым устройством для регулировки, устройство для регулировки перемещается предопределенным образом, вследствие чего принудительно управляемые колеса поворачиваются, при этом мощность, необходимая для поворота колес, надежно отбирается из системы электрического или механического обеспечения автомобиля-тягача. Это гарантирует надежный поворот колес, причем могут воспроизводиться даже нелинейные передаточные функции принудительного управления 1 и передаточные функции принудительного управления, т.е. угол поворота колес на градус между автомобилем-тягачом и автоприцепом, также могут непрерывно, в частности, в зависимости от ситуации, предпочтительно, даже во время движения автопоезда, задаваемым образом адаптироваться согласно параметрам адаптации. Соответствующими параметрами адаптации, в числе прочего, могут быть скорость автопоезда и/или наклон автомобиля-тягача, автоприцепа 2 или автопоезда, и/или нагрузка на ось автоприцепа 2. Для этого в принудительном управлении 1, в частности, в устройстве для регулировки, могут быть заранее записаны характеристики, и в зависимости от ситуации из этих характеристик может выбираться предпочтительная для данной ситуации. Передаточная функция принудительного управления может быть изображена, например, в виде диаграммы и обозначена как характеристика принудительного управления 1.
Передаточная функция принудительного управления предпочтительно может быть выполнена линейной и/или нелинейной. В частности, передаточная функция принудительного управления в зависимости от ситуации может быть выполнена или задаваемо линейной, или - в других ситуациях - задаваемо нелинейной.
Для предварительного определения задаваемой передаточной функции принудительного управления, среди прочего, релевантными могут быть следующие параметры: межосевое расстояние от передней до задней оси автомобиля-тягача, габаритная ширина кузова автомобиля-тягача, габаритная ширина кузова автоприцепа 2, расстояние задней оси автомобиля-тягача до места 10 соединения.
В особенно предпочтительном втором варианте выполнения принудительного управления 1, изображенном на фиг. 3 и 4, предпочтительно предусмотрено, что со вторым элементом 4 управления соединен по меньшей мере один первый поршневой элемент 61, причем первый поршневой элемент 61 установлен с возможностью перемещения в первом баке 6 для жидкости, а внутренний объем первого бака 6 для жидкости разделяется на две области 62, а для поворота колес автоприцепа 2 с обеими областями 62 функционально соединены рабочие цилиндры. При движении, в частности, при повороте второго элемента 4 управления, поршневой элемент 61 также перемещается, в частности, внутри бака 6 для жидкости, так что первый объем в одной из обеих двух областей 62 уменьшается, в то время как второй объем в другой из обеих двух областей 62 увеличивается. Поскольку эти объемы заполнены по существу несжимаемой жидкостью, жидкость или вытесняется в первый соединительный трубопровод 65, а из второго соединительного трубопровода 66 отбирается, или вытесняется во второй соединительный трубопровод 66, а из первого соединительного трубопровода 65 отбирается. Это движение жидкости для поворота колес автоприцепа 2, в частности, может реализовывать функциональную связь по меньшей мере с одним рабочим цилиндром. Предпочтительно, чтобы бак 6 для жидкости устанавливался в области тяги 22 особенно компактно и мог особенно просто монтироваться и демонтироваться, т.е. заменяться.
В частности, может быть предусмотрено, что второй элемент 4 управления в области оси 64 поворота первого бака 6 для жидкости соединен с поршневым элементом 61, причем поршневой элемент 61 установлен с возможностью поворота вокруг оси 64 поворота. В частности, может быть предусмотрено, что ось 64 поворота проходит через второе место 12 шарнирного соединения с тем, чтобы поршневой элемент 64 гарантированно поворачивался при повороте второго элемента 4 управления. Предпочтительно, может быть предусмотрено, что поршневой элемент 61 и второй элемент 4 управления поворачиваются каждый в своей плоскости, которые параллельны друг другу.
При этом информация, зависящая от угла между автомобилем-тягачом и автоприцепом 2, т.е. информация об угле, преобразуется в сигнал давления жидкости, в частности гидравлической жидкости. При этом сигнал формируется не электрически, а механически. При этом мощность, необходимая для поворота колес, передается из первой точки 11 шарнирного соединения на принудительное управление 1 непосредственно, причем в дополнительной подаче энергии для принудительного управления необходимости нет. При этом предпочтительно, что, в частности, рабочий цилиндр не нуждается в снабжении дополнительной энергией с тем, чтобы рабочий цилиндр не пришлось подключать к снабжению со стороны автомобиля-тягача. В этой связи может быть предусмотрено, что первый бак 6 для жидкости по меньшей мере местами окружает второе место 12 шарнирного соединения. При этом предпочтительно, чтобы информация об угле в области второго места 12 шарнирного соединения могла особенно просто преобразовываться в механический сигнал, причем поршневой элемент 61 при изменении угла между автомобилем-тягачом и автоприцепом 2 по существу поворачивался.
Предпочтительно может быть предусмотрено, что первый поршневой элемент 61 механически соединен со вторым элементом 4 управления, как это показано на фиг. 3 и 4. При этом поршневой элемент 61 может быть жестко соединен со вторым шарнирным устройством 41 и при изменении угла второго шарнирного устройства 41 поворачиваться вместе с ним.
В предпочтительном усовершенствованном варианте выполнения может быть предусмотрен второй бак для жидкости, причем во втором баке для жидкости установлен с возможностью перемещения второй поршневой элемент, а также предусмотрено, что первый поршневой элемент 61 и второй поршневой элемент соединены с передачей. При этом второй бак для жидкости образует второй датчик и может регулировать другие принудительно управляемые колеса. При этом предпочтительно, чтобы колеса первой принудительно управляемой оси поворачивались согласно первой задаваемой передаточной функции, а колеса второй принудительно управляемой оси - согласно второй задаваемой передаточной функции, отличной от первой передаточной функции. При этом колеса, последовательно установленные с возможностью поворота, если смотреть по направлению движения автопоезда, при определенном угле между автомобилем-тягачом и автоприцепом 2 предпочтительно могут поворачиваться в разной степени, что при наличии у автоприцепа 2 нескольких осей может быть преимуществом.
В этой связи предпочтительно может быть предусмотрено, что первый поршневой элемент 61 и второй поршневой элемент установлены с возможностью поворота вокруг общей оси. В частности, эта общая ось может совпадать с осью, образующей второе место 12 шарнирного соединения. При этом принудительное управление 1 автоприцепа 2 может быть выполнено компактным.
Как показано на фиг. 8, в одном из предпочтительных вариантов выполнения принудительного управления 1 может быть предусмотрено, что на автоприцепе 2 установлен фиксирующий элемент 7 для фиксации принудительного управления 1. При этом фиксирующий элемент 7, в частности, геометрически может быть выполнен аналогично направляющему устройству автомобиля-тягача, образующему первое место 11 шарнирного соединения и посредством которого, в частности, первое шарнирное устройство 31 может фиксироваться на фиксирующем элементе 7.
Предпочтительно может быть предусмотрено, что принудительное управление 1 зафиксировано на фиксирующем элементе 7 таким образом, что колеса, управляемые с помощью принудительного управления 1, могут устанавливаться в прямом направлении.
В порядке альтернативы или дополнения к этому принудительное управление 1 может фиксироваться на фиксирующем элементе 7 таким образом, чтобы колеса, поворот которых регулируется с помощью принудительного управления 1, если принудительное управление 1 зафиксировано посредством фиксирующего элемента 7, были установлены в другом, отличном от прямого направлении. При этом может быть сформировано так называемое стояночное положение колес автоприцепа 2.
Вместо или в дополнение к детектору 5, к первому баку 6 для жидкости и/или ко второму баку для жидкости система принудительного управления 1 может содержать цилиндр-датчик 8, который также может преобразовывать информацию об угле в механический сигнал, в частности в гидравлическое давление, и, в частности, может быть функционально эквивалентным первому баку 6 для жидкости. При этом цилиндр-датчик 8 может по меньшей мере частично формировать второй блок. При этом цилиндр-датчик 8 геометрически может быть аналогичен обычному принудительно управляемому цилиндру. Однако при этом предусмотрено, что цилиндр-датчик 8 не вступает в непосредственный контакт с автомобилем-тягачом, т.е. что он выполнен без контакта с ним, а скорее посредством первого блока соединен с автомобилем-тягачом за счет силового взаимодействия, т.е. соединен под действием сил. При этом предпочтительно, чтобы имеющиеся принудительно управляемые цилиндры могли при этом использоваться дальше в качестве цилиндров-датчиков 8. Кроме того, при этом предпочтительно, чтобы цилиндр-датчик 8 все же мог устанавливаться таким образом, чтобы максимальный угол между автоприцепом 2 и автомобилем-тягачом был большим, в частности мог неизменно быть большим по сравнению с автоприцепом без принудительного управления.
В частности, может быть предусмотрено, что в точке 81 приложения воздействия второго элемента 4 управления цилиндр-датчик 8 оказывает воздействие одним концом, причем цилиндр-датчик 8 другим концом неподвижно закреплен относительно второго прицепа 2 и цилиндр-датчик 8 для поворота колес автоприцепа функционально соединен с рабочими цилиндрами, как это предусмотрено в третьем и четвертом предпочтительных вариантах выполнения принудительного управления. В третьем варианте выполнения цилиндр-датчик 8 при рассмотрении в рабочем положении прицепа установлен над тягово-сцепным устройством, в частности тягой 22. В третьем варианте выполнения цилиндр-датчик 8 при рассмотрении в рабочем положении прицепа установлен ближе к земле, чем тягово-сцепное устройство, в частности тяга 22.
В этой связи предпочтительно может быть предусмотрено, что расстояние точки 81 приложения воздействия от второго шарнирного устройства 41 задается посредством устройства 43 для регулировки. Первый предпочтительный вариант выполнения устройства 43 для регулировки изображен на фиг. 11 и 12. В этом варианте выполнения предусмотрено, что во втором элементе 4 управления выполнено сквозное продольное отверстие 44, и устройство 43 для регулировки вставляется в сквозное продольное отверстие 43 и перемещается в продольном отверстии таким образом, чтобы задаваемое расстояние точки 81 приложения воздействия от второго шарнирного устройства 41 могло варьироваться, т.е. могло уменьшаться или увеличиваться. При этом предпочтительно, чтобы передаточная функция принудительного управления могла изменяться таким образом, чтобы отношение угла между автомобилем-тягачом и автоприцепом 2 к углу поворота принудительно управляемых колес задавалось переменным, причем чтобы в зависимости от расстояния точки 81 приложения воздействия от второго шарнирного устройства 41 передаточная функция принудительного управления, т.е. угол поворота колес на градус между автомобилем-тягачом и автоприцепом 2, выполнялась по-иному. При этом передаточная функция принудительного управления может называться также характеристикой, причем даже при этом каждому предопределенному положению устройства 43 для регулировки относительно второго элемента 4 управления соответствует предопределенная характеристика.
В частности, сквозное продольное отверстие 44 по меньшей мере местами имеет участок наподобие зубчатой рейки. При этом устройство 43 для регулировки может содержать зубчатое колесо, с помощью которого устройство 43 для регулировки может плавно перемещаться вдоль сквозного продольного отверстия 44. Для фиксации соответствующего положения устройства 43 для регулировки оно посредством зажимного элемента может зажиматься на втором элементе 4 управления. Этот зажимный элемент может быть выполнен в виде уплотнительной шайбы и гайки с резьбой на участке с резьбой устройства 43 для регулировки. При этом предпочтительной является особенно простая и плавная регулировка расстояния точки 81 приложения воздействия до второго шарнирного устройства 41.
В предпочтительном варианте может быть предусмотрено, что по меньшей мере два цилиндра-датчика 8 установлены по существу параллельно друг другу. Один из обоих цилиндров-датчиков 8 может быть, например, установлен над тягой 22, а другой из обоих цилиндров-датчиков 8 - под ней. При этом предпочтительно, чтобы один из обоих цилиндров-датчиков 8 мог регулировать поворот первой принудительно управляемой пары колес, а другой из обоих цилиндров-датчиков 8 - поворот второй принудительно управляемой пары колес, в частности, с отличными друг от друга передаточными функциями принудительного управления.
Поскольку второй блок, т.е. по существу детектор 5, бак 6 для жидкости и/или цилиндр-датчик 8, не должен монтироваться на автомобиле-тягаче или демонтироваться с автомобиля-тягача, предпочтительным образом может быть предусмотрено, что этот второй блок расположен по существу недоступным, т.е. по существу может быть закрытым, для чего может быть предусмотрено, что второй блок установлен под крышкой, в корпусе, заключен в оболочку и/или отлит. При этом предпочтительно, что детектор 5, бак 6 для жидкости и/или цилиндр-датчик 8 защищены от частиц грязи и/или от удара. Таким образом, обслуживание детектора 5, бака 6 для жидкости и/или цилиндра-датчика 8 может осуществляться без особых затрат и/или гарантировать большую устойчивость и нагрузочную способность.
В одном из предпочтительных вариантов может быть предусмотрено, что система принудительного управления 1 содержит отдельные узлы для принудительного управления вправо и принудительного управления влево. При этом детектор 5, бак 6 для жидкости и/или цилиндр-датчик 8 может, соответственно, разделяться на два альтернативных элемента, т.е. на два альтернативных детектора, два альтернативных бака для жидкости и два альтернативных цилиндра-датчика. При этом предпочтительно, чтобы каждый из этих элементов мог быть еще более уменьшен.
В особенно предпочтительном варианте выполнения может быть предусмотрено, что при рассмотрении в направлении действия системы принудительного управления 1 за вторым местом 12 шарнирного соединения и впереди первого бака 6 для жидкости, соответственно, цилиндра-датчика 8, или за первым баком 6 для жидкости, соответственно, цилиндром-датчиком 8, и впереди рабочего цилиндра установлен цилиндр исполнительного механизма. Этот цилиндр исполнительного механизма предпочтительно может обеспечивать два действия: с одной стороны, цилиндр исполнительного механизма без всяких усилий может быть установлен для включения и выключения принудительного управления, вследствие чего принудительное управление 1 выполнено без передачи усилий, а позиция первого места 11 шарнирного соединения не коррелирует с положением принудительно управляемых колес. Для этого цилиндр исполнительного механизма может, например, устанавливаться без давления. Для восстановления передаточной функции принудительного управления 1 цилиндр исполнительного механизма может устанавливаться с передачей усилий, для чего на цилиндр исполнительного механизма может подаваться давление. В этом положении передаточная функция принудительного управления 1 является активной, а позиция первого места 11 шарнирного соединения коррелирует с положением принудительно управляемых колес.
Особенно предпочтительно может быть предусмотрено, что система управления в области за первым баком 6 для жидкости и/или цилиндром-датчиком 8 содержит первый уравнитель давления и/или второй уравнитель давления. При этом может быть предусмотрено, что пики давления в этой системе управления уравниваются с помощью первого и/или второго уравнителей давления. При этом предпочтительно, чтобы удары или избыточные давления, которые могут иметь место в отношении первого бака 6 для жидкости и/или цилиндра-датчика 8 при движении, в частности при движении по неровной местности, могли передаваться рабочим цилиндрам в ослабленном виде, т.е. уравненными. Благодаря этому пики напряжений в трубопроводах, в частности в гидролиниях, а также в баке 6 для жидкости или в цилиндре-датчике 8 и/или в рабочих цилиндрах могут предотвращаться и/или уменьшаться. При этом предпочтительно, чтобы могли быть обеспечены большой срок службы и/или высокая проходимость системы принудительного управления.
Для этого первый и/или второй уравнители давления могут быть выполнены в виде гидроаккумуляторов на 80 и/или 50 бар.
Предпочтительно может быть предусмотрено, что принудительное управление 1 включает в себя датчик давления для определения давления, в частности гидравлического давления, в принудительном управлении 1. Датчик давления может регистрировать давление, в частности гидравлическое давление, в принудительном управлении и передавать его в контрольное устройство. При этом предпочтительно, чтобы давление при этом могло контролироваться непрерывно, т.е. в основном без большой временной задержки, причем чтобы, в частности, слишком низкое давление, т.е. падение давления в принудительном управлении 1, например, ниже 10 бар, или слишком высокое давление, т.е. увеличение давления в принудительном управлении 1, например, свыше 100 бар, могло доводиться до сведения водителя автомобиля-тягача, например, с помощью предупредительной индикации. Для этого датчик давления может быть соединен с предупредительной системой, которая может входить в контрольное устройство. Это обеспечивает дополнительную эксплуатационную надежность принудительного управления.
В этой связи один или несколько датчиков давления могут быть выполнены и установлены на первом баке 6 давления, на втором баке давления, на рабочем цилиндре, на цилиндре-датчике 8, на первом соединительном трубопроводе 65 и/или на втором соединительном трубопроводе 66. Поскольку эти компоненты принудительного управления 1, если они предусмотрены в принудительном управлении 1, взаимодействуют, в этих компонентах обычно действует примерно одинаковое давление.
В другом предпочтительном варианте выполнения автоприцепа 2 последний может быть выполнен в виде полуприцепа. При этом тягово-сцепное устройство вместо тяги 22 выполнено скорее в виде проникающего тела, причем проникающее тело выполнено для локального проникновения в плиту седельно-сцепного устройства, выполненную в автомобиле-тягаче. В этой связи автомобиль-тягач может называться седельным тягачом. Седельный прицеп может называться также полуприцепом или трейлером. При этом седельный прицеп может содержать принудительное управление 1, причем первое место 11 шарнирного соединения может быть установлено, в частности, на плите седельно-сцепного устройства, при этом второе место 12 шарнирного сцепления может быть установлено на седельном прицепе. При этом принудительное управление 1 предпочтительно также может содержать детектор 5, первый бак 6 для жидкости, второй бак для жидкости и/или по меньшей мере один цилиндр-датчик 8.
Другие варианты выполнения согласно изобретению содержат лишь часть описанных признаков, причем предусмотрена может быть любая комбинация признаков, в частности, даже разных описанных вариантов выполнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРИНУДИТЕЛЬНОГО УПРАВЛЕНИЯ | 2009 |
|
RU2515620C2 |
| СЕДЕЛЬНО-СЦЕПНОЕ УСТРОЙСТВО | 2009 |
|
RU2514321C2 |
| ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО ДЛЯ ПРИЦЕПА | 2010 |
|
RU2521884C2 |
| СЦЕПНАЯ ПЕТЛЯ | 2010 |
|
RU2529709C2 |
| СИЛОВАЯ БУКСИРНАЯ ПРОУШИНА | 2014 |
|
RU2646698C2 |
| РАБОЧЕЕ УСТРОЙСТВО ДЛЯ ПОЖАРОТУШЕНИЯ | 2008 |
|
RU2458717C2 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ ПРОСВЕТА МЕЖДУ АВТОМОБИЛЕМ-ТЯГАЧОМ И ПРИСОЕДИНЕННЫМ К НЕМУ ПРИЦЕПОМ | 2012 |
|
RU2556826C2 |
| УСТРОЙСТВО ДЛЯ ВЫЕМКИ ГРУНТА | 2007 |
|
RU2366780C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С УКРЫВНЫМ УСТРОЙСТВОМ ДЛЯ ГРУЗОВОЙ КОНСТРУКЦИИ | 2014 |
|
RU2598431C2 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА СКЛАДЫВАНИЯ И СОСТАВ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2748293C2 |






Изобретение относится к области транспортного машиностроения. Принудительное управление для управления автоприцепом, сцепленным с автомобилем-тягачом, содержит первое место шарнирного соединения, неподвижное относительно автомобиля-тягача, и второе место шарнирного соединения, неподвижное относительно автоприцепа. Первый элемент управления содержит первое шарнирное устройство для воздействия на первое место шарнирного соединения. Первый элемент управления соединен со вторым элементом управления на первом постоянном расстоянии от первого шарнирного устройства с возможностью поворота с образованием центра поворота. Второй элемент управления содержит на втором постоянном расстоянии от центра поворота второе шарнирное устройство для воздействия на второе место шарнирного соединения. Цилиндр-датчик воздействует одним концом в точке воздействия второго элемента управления, а другим концом неподвижно закреплен относительно автоприцепа. Цилиндр-датчик для поворота колес автоприцепа функционально соединен с рабочими цилиндрами. Предусмотрена возможность задания расстояния от точки воздействия второго элемента управления до второго шарнирного устройства посредством устройства для регулировки. Достигается улучшение управления автоприцепом. 14 з.п. ф-лы, 12 ил.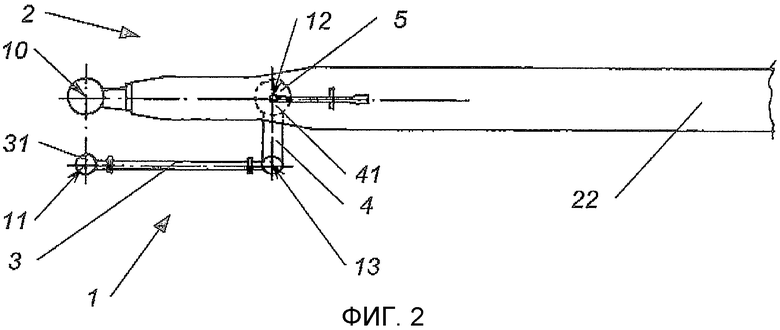
1. Принудительное управление (1) для управления автоприцепом (2), сцепленным с автомобилем-тягачом, содержащее первое место (11) шарнирного соединения, неподвижное относительно автомобиля-тягача, и второе место (12) шарнирного соединения, неподвижное относительно автоприцепа (2), причем первый элемент (3) управления содержит первое шарнирное устройство (31) для воздействия на первое место (11) шарнирного соединения, причем первый элемент (3) управления соединен со вторым элементом (4) управления на первом постоянном расстоянии от первого шарнирного устройства (31) с возможностью поворота с образованием центра (13) поворота, и второй элемент (4) управления содержит на втором постоянном расстоянии от центра (13) поворота второе шарнирное устройство (41) для воздействия на второе место (12) шарнирного соединения, отличающееся тем что в точке (81) воздействия второго элемента (4) управления воздействует одним концом цилиндр-датчик (8), причем цилиндр-датчик (8) другим концом неподвижно закреплен относительно автоприцепа (2), при этом цилиндр-датчик (8) для поворота колес автоприцепа функционально соединен с рабочими цилиндрами, причем предусмотрена возможность задания расстояния от точки (81) воздействия до второго шарнирного устройства (41) посредством устройства (43) для регулировки.
2. Принудительное управление по п. 1, отличающееся тем, что во втором элементе (4) управления выполнено сквозное продольное отверстие (44), причем устройство (43) для регулировки вставляется в сквозное продольное отверстие (44) и перемещается в продольном отверстии (44) с обеспечением возможности варьирования расстояния от точки (81) приложения воздействия до второго шарнирного устройства (41) задаваемым образом.
3. Принудительное управление по п. 2, отличающееся тем, что сквозное продольное отверстие (44) по меньшей мере местами имеет участок наподобие зубчатой рейки.
4. Принудительное управление по п. 1, отличающееся тем, что меньшей мере два цилиндра-датчика (8) установлены по существу параллельно друг другу.
5. Принудительное управление по п. 1, отличающееся тем, что в нем предусмотрен детектор (5) для определения положения второго элемента (4) управления относительно второго места (12) шарнирного соединения, при этом для поворота колес автоприцепа (2) детектор (5) функционально соединен с устройством для регулировки.
6. Принудительное управление по п. 1, отличающееся тем, что со вторым элементом (4) управления соединен по меньшей мере один первый поршневой элемент (61), при этом первый поршневой элемент (61) установлен в первом баке (6) для жидкости с возможностью перемещения и разделяет последний на две области (62), причем для поворота колес автоприцепа (2) с обеими областями (62) функционально соединены рабочие цилиндры.
7. Принудительное управление по п. 6, отличающееся тем, что первый бак (6) для жидкости установлен по меньшей мере в отдельных областях по окружности вокруг второго места (12) шарнирного соединения.
8. Принудительное управление по п. 6, отличающееся тем, что первый поршневой элемент (61) механически соединен со вторым элементом (4) управления.
9. Принудительное управление по п. 6, отличающееся тем, что в нем предусмотрен второй бак для жидкости, при этом во втором баке для жидкости установлен второй поршневой элемент с возможностью перемещения, причем первый поршневой элемент (61) и второй поршневой элемент соединены с передачей.
10. Принудительное управление по п. 9, отличающееся тем, что первый поршневой элемент (61) и второй поршневой элемент установлены с возможностью поворота относительно автоприцепа (2) вокруг общей оси.
11. Принудительное управление по п. 1, отличающееся том, что на автоприцепе (2) установлен фиксирующий элемент (7) для фиксации принудительного управления (1).
12. Принудительное управление по п. 11, отличающееся тем, что принудительное управление (1) выполнено с возможностью фиксации на фиксирующем элементе (7) таким образом, что колеса, управляемые с помощью принудительного управления (1), установлены в прямом направлении.
13. Принудительное управление по п. 11, отличающееся тем, что первое шарнирное устройство (31) выполнено с возможностью фиксации на фиксирующем элементе (7).
14. Принудительное управление по п. 1, отличающееся тем, что принудительное управление (1) содержит датчик давления для определения давления, в частности гидравлического давления, в принудительном управлении (1).
15. Принудительное управление по п. 14, отличающееся тем, что датчик давления соединен с предупредительной системой.
| US 7694993 B2, 13.04.2010 | |||
| Устройство для автоматической блокировки вертикального шарнира сцепки тягача с прицепным звеном | 1987 |
|
SU1411203A1 |
| ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО АВТОПОЕЗДА | 2008 |
|
RU2368512C1 |

