Изобретение относится к транспортному и сельскохозяйственному машиностроению и может бьггь использовано npv: создании систем управления транспортных средств и сепьскохозяйствен- ; ных агрeiraTOB.
Цшгь изобретения - повьшение ус- гсотивости прямолинейного движения прицепного звена
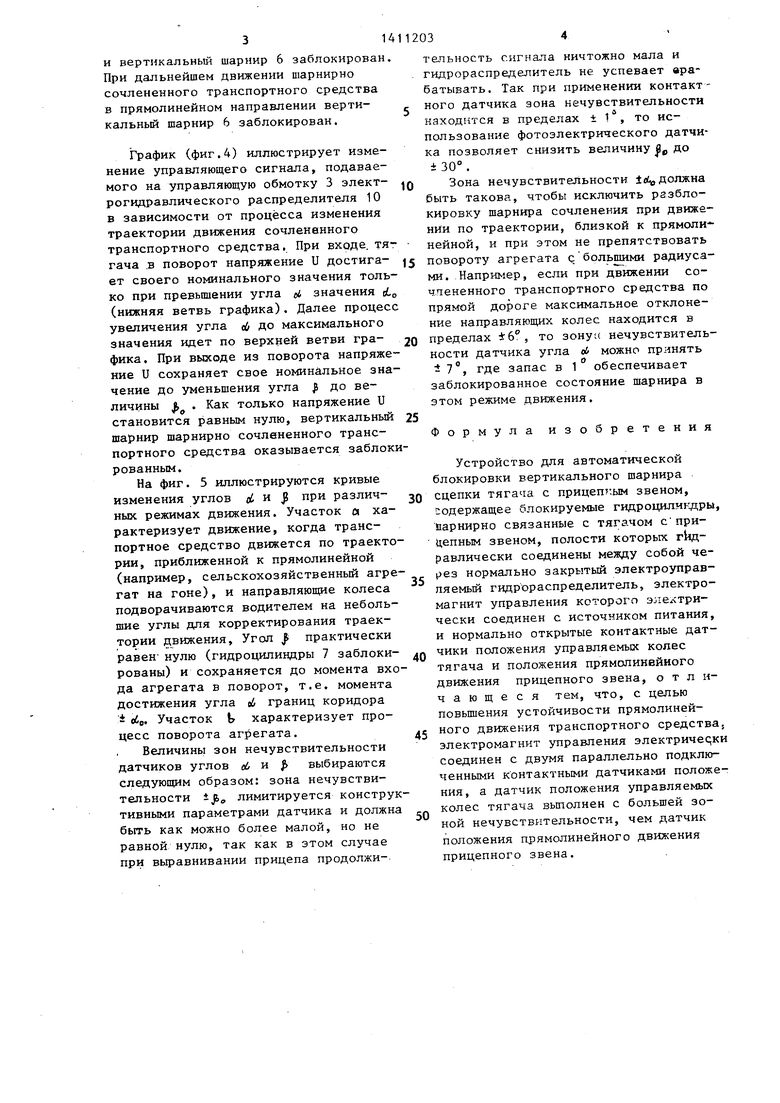
На фиг, 1 изобрахсено сочлененное транснортное, средство, оборудованное I устройством для автоматической блокировки вертикального шарнира, общий вид; на фиг. 2 - структурная схема . устройстве ; на фиг, 3 - графики изме нения выходных сигналов датчиков yvjia палравлякцщ-Пу колес тягача и npHjMOJiHHeftnoro положения прицепного I звена; иа фиг. 4 - графики изменения управ.тшюашго сигнала, подаваемого иа Bxojj электроуправляемого гидро- ; распределятслк; на фиг. 5 -- кривью 5гзменения углов ci и при движении i сочлененного транспортного средства. I Устройство содержит контактный дат-аик 1 угла поворота управляемых колес 2 тягача 3., контактный датчик 4 прямпг ниейного пох -гг/ения прицепно- 145 звена, Контактньш /...лтчик 1 угла : 1 кс :ота управляе ьп, - oJiec 2 уст анов л оь:, например, на сошке рулевого ме- Kai. H3Ma тягача контактный датчик 4 ярямолл;-: 5ейн.ого положения прицепа 5 ; стано; лг.н на оси вертикального шар- 6j зл-а сочленения тз5чага и rn;)Hj ei)a . По обеим сторонам вертикаль н:о1. о u-арнира 6 ус1 аковлены блокиру- «ц/лде ги,;1л;1оцшшндрь 7, шарнирно сое- rniiit-HHwe с-рамой тягача 3 и прицепа 5 Коитя : тиые датчики 1 у 4 параллельно соеди ш;-и межд у вобой., подключены к источнику 8 питанкк и управляющей
9 i
ине
обмотке 9 электроуправляемого гидро- распределк геля 10., Последний имеет ,цва ф1-;ксирОБа :иьп, положения: первое ГФ1Ч г:од; ,чюченни упраьиляв;и 1ей обмотки :-и; .;очиИлу 8 питания со единит ел ь- маг1,.стрг1лк 11 сообщен-:; между со- т(ри йтсгк о5е полости обоих гидлйкдроЕ 7 с:ообщены собой г; замкнутую систему: второе - при откллочеиии уг1равляюн1,ей обмотки 9 от пстпчикка В питания соединительные магкстоали 11 заперты, при этом обе iionoC i K ;йошс г идро1лИЛ мдроЕ 7 так- же зй-таутп, Коптактньш; датчик 1 ра- зомтгнут при устаь овке -/аравляемых КОЛЫ - 2 в положеине 5тр ;молинейного
10
20
, 15,
30
движения (в пределах заданного угла cij,, фиг. За) и замкнут при выходе угла поворота управляемых колес за пределы заданного угла. Контактный датчик 4 прямолинейного положения прицепа разомкнут при нулевом значении, угла складывания (в пределах минимальной зоны нечувствительности (фиг. Зб) И замкнут при отклонении угла складывания за пределы минимальной зоны, нечувствительности. Предлагаемое устройство работает следующим образом.
При движении шарнирно сочлененного транспортного средства на повороте управляемые колеса 2 повернуты на угол, величина которого выходит за пределы заданного, при этом датчик 1 замкнут. Управляющая обмотка 9 гидрораспределителя 10 подключена к источнику 8 питания, и золотник гидрораспределителя 10 устанавливается в первое положение, при котором
25 обе полости гидроцилиндров 7 сообщены между собой и их штоки находятся в плавающем положении. В этом случае прицеп 5 имеет возможность свободного поворота относительно тягача 3 вокруг вертикального шарнира 6, что позволяет колесом прицепа 5 копировать траекторию движения колес тягача 3.
При выходе шарнирно сочлененного транспортного средства из поворота угол ai поворота управляемых колес 2 уменьшается и при входе величины угла ot в заданный допуск i «6 контактный датчик 1 размыкается. При этом контактный датчик 4 угла складывания продолжает оставаться в замкнутом состоянии, и положение золотника гидрораспределителя 10 не изменяется, так как управляющая обмотка 3 ,остает jij ся подключенной к источнику 8 питания через замкнутый контактный датчик 4. По мере приближения траектории движения шарнирно сочлененного транспортного средства к прямолинейной угол f складывания уменьшается и при достижении величиной угла 3 складывания зоны нечувствительности кон- тактньй датчик 4 также размыкается, разрывая цепь питания управляющей обмотки 9, так как при этом контактные датчики 1 и 4 разомкнуты. Золотник гидрораспределителя 10 переходит во второе положенне, при котором обе полости силовых цилиндров 7 заперты.
35
40
50
55
31
и вертикальный шарнир 6 заблокирован. При дальнейшем движении шарнирно сочлененного транспортного средства в прямолинейном направлении вертикальный шарнир 6 заблокирован.
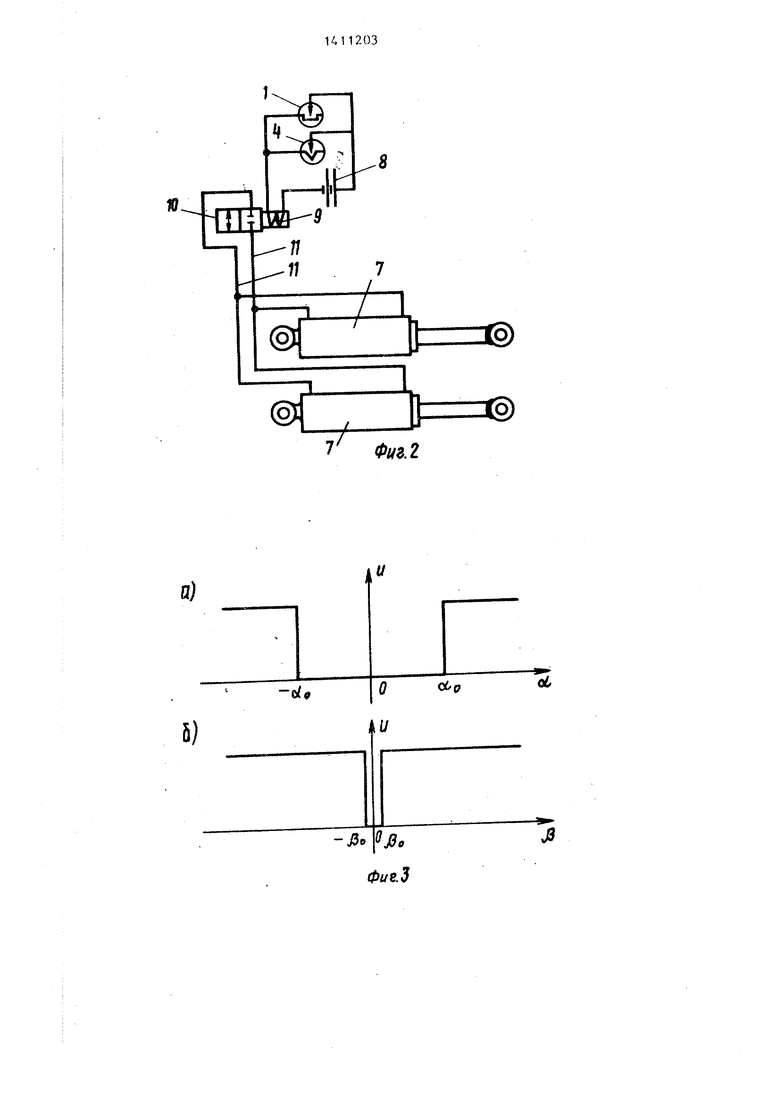
График (фиг.4) иллюстрирует изменение управляющего сигнала, подаваемого на управляющую обмотку 3 электрогидравлического распределителя 10 в зависимости от процесса изменения траектории движения сочлененного транспортного средства. При входе, тягача .в поворот напряжение U достигает своего номинального значения только при превьпиении угла ei значения d-o (нижняя ветвь графика). Далее процесс увеличения угла еб до максимального значения идет по верхней ветви графика. При выходе из поворота напряжение и сохраняет свое номинальное значение до уменьшения угла до величины . Как только напряжение U становится равным нулю, вертикальный шарнир шарнирно сочлененного транспортного средства оказывается заблоки рованным.
На фиг. 5 иллюстрируются кривые изменения углов gL и при различных режимах движения. Участок а характеризует движение, когда транспортное средство движется по траектории, приближенной к прямолинейной (например, сельскохозяйственный агрегат на гоне), и направляющие колеса подворачиваются водителем на небольшие углы для корректирования траектории движения. Угол } практически равен нулю (гидроцилиндры 7 заблокированы) и сохраняется до момента входа агрегата в поворот, т.е. момента достижения угла «, границ коридора - oip. Участок Ь характеризует процесс поворота агрегата.
Величины зон нечувствительности датчиков углов об и выбираются следующим образом: зона нечувствительности ifiy лимитируется конструктивными параметрами датчика и должна быть как можно более малой, но не равной нулю, так как в этом случае при вьфавнивании прицепа продолжи034
тельность сигнала ничтожно мала и гидрораспределитель не успевает ара- батывать. Так при применении контактного датчика зона нечувствительности находится в пределах ±1, то использование фотоэлектрического датчика позволяет снизить величину й до ±30°.
Зона нечувствительности ±вЦ, должна быть такова, чтобы исключить разблокировку шарнира сочленения при движении по траектории, близкой к прямоли нейной, и при этом не препятствовать
повороту агрегата Q большими радиусами . Например, если при движении сочлененного транспортного средства по прямой дороге максимальное отклонение направляющих колес находится в
пределах 6°, то зонуи нечувствительности датчика угла rf можно принять -7°, где запас в 1 обеспечивает заблокированное состояние шарнира в этом режиме движения.
25
Формула изобретения
Устройство для автоматической блокировки вертикального шарнира
сцепки тягача с прицепг.ым звеном,
содержащее блокируемые гидроциликдры, Парнирно связанные с тягачом с при- Цепным звеном, полости которых г1ад- равлически соединены между собой через нормально закрытый электроуправ- ляемый гидрораспределитель, электромагнит управления которого электрически соединен с источником питания, и нормально открытые контактные датчики положения управляемых колес тягача и положения прямолинейного движения прицепного звена, о т л н- ч а ю щ е с я тем, что, с целью повьщ1ения устойчивости прямолинейного движения транспортного средства, электромагнит управления электрически соединен с двумя параллельно подключенными контактными датчиками положения, а датчик положения управляемых колес тягача вьтолнен с большей зоной нечувствительности, чем датчик положения прямолинейного движения прицепного звена.
-8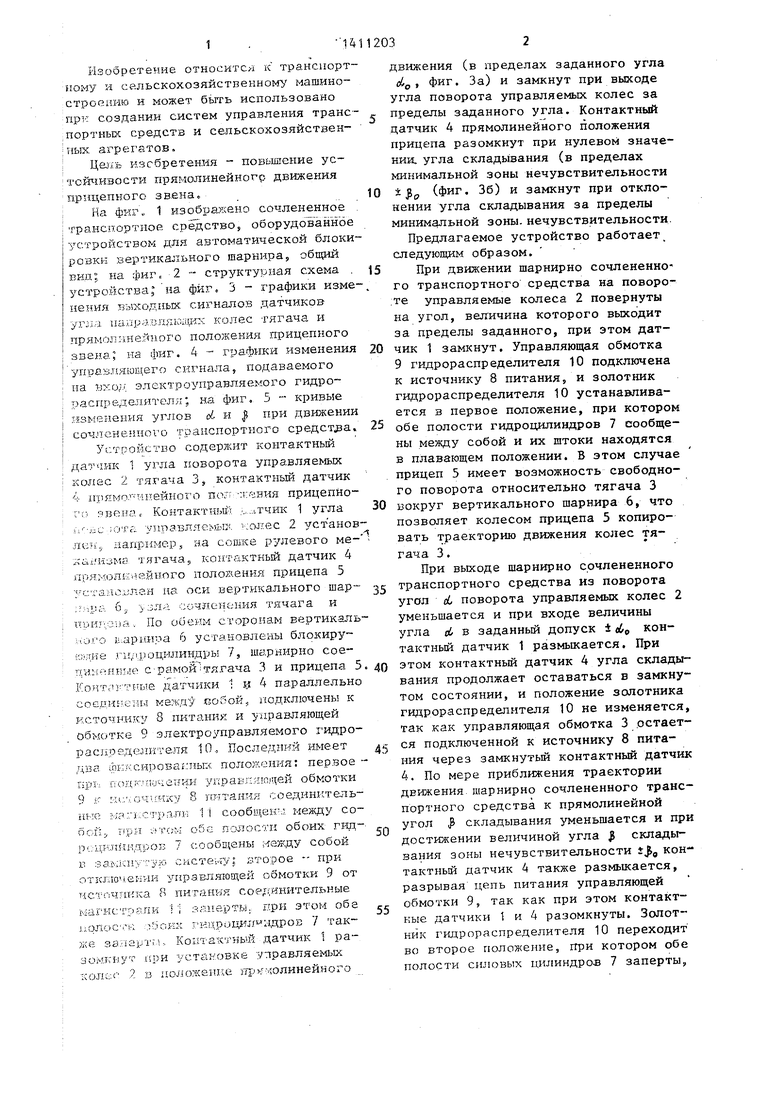
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТОРМОЗНЫХ СИЛ НА КОЛЕСАХ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2028227C1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| Устройство для управления колесами прицепа-роспуска | 1984 |
|
SU1194754A1 |
| МОДУЛЬ СИЛОВОГО УЗЛА СЦЕПНОГО УСТРОЙСТВА И СЦЕПНОЕ УСТРОЙСТВО С ТАКИМ МОДУЛЕМ (ВАРИАНТЫ) | 2012 |
|
RU2506173C1 |
| Тягово-сцепное устройство одноосного прицепа с регулируемой длиной тягового рычага | 2022 |
|
RU2792139C1 |
| ПРИЦЕПНОЕ УСТРОЙСТВО | 1993 |
|
RU2047500C1 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
Изобретение относится к транс- .лортному и сельскохозяйственному машиностроению и может быть использовано при создании систем управления транспортных средств и сельскохозяйственных агрегатов. Цепью изобретения является повышение устойчивости прямолинейного движения. трансг ортно го средства. Устройство состоит из контактного датчика 1 угла положения управляемых колес 2 тягача 3, контактг ного датчика 4 прямолинейного положения прицепного звена 5 и установленного на оси 6 вертикального шарнира сочленения, блокирующих гидро- цилиндров 7, шарнирно соединенных с рамой тягача 3, и прицепа 5, источника питания устройства, электро- управляемого гидрораспределите.пя с управляющей обмоткой, а также соединительных магистралей. 5 л. 7 $ О СО Фиг.
-П
Я7
/
77
7 /г.2
9
6)
ZZ1
оброб
J3.
.
J3
Фи8.3
Фиг, Фиа,5
| Патент ФРГ № 2935437, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
