Изобретение относится к системе для автоматической регулировки просвета между автомобилем-тягачом и присоединенным к нему прицепом, содержащей дышло с возможностью смещения по длине, в частности с возможностью выдвигания, с тяговой трубой и с расположенной на ней с конечной стороны тяговой петлей, причем тяговая петля может перемещаться относительно тяговой трубы при помощи приводного устройства в продольной оси автомобиля через заданный путь перемещения, а также содержащей устройство управления.
Автомобиль-тягач и прицеп образуют в соединенном положении грузовой поезд или автопоезд, причем как автомобиль-тягач, так и прицеп выполнены для достижения своего максимального объема перевозок с коробчатым, высоким кузовом. Вокруг просвета между автомобилем-тягачом и прицепом, в частности, при быстром движении по прямой, возникают значительные завихрения и турбулентность, которые отрицательно сказываются на расходе топлива и выбросах вредных веществ. Однако уменьшение просвета возможно только при движении автопоезда по прямой, так как при движении по кривой опасность состоит в том, что прицеп сталкивается с автомобилем-тягачом. Следовательно, во время эксплуатации автомобиля после уменьшения просвета обязательно требуется снова восстанавливать достаточно большой просвет в случае экстренного торможения или при объезде, причем под понятием "автоматически" понимают имманентную регулировку зазора, то есть без вмешательства человека.
В прошлом уже имели место стремления уменьшать просвет при движении автопоезда по прямой и увеличивать его при движении по кривой для предотвращения столкновения противостоящих углов кузова автомобиля-тягача и прицепа. Из документа DE 33 33 231 А1 согласно уровню техники известно дышло, регулируемое посредством гидравлического рабочего цилиндра, причем рабочий цилиндр питается от цилиндра-датчика, расположенного под поворотным кругом. Как только поворачивается передняя ось прицепа, поршень цилиндра-датчика задвигается или выдвигается и выдавливает гидравлическую жидкость из цилиндра-датчика в рабочий цилиндр, передвигающий в свою очередь тяговую петлю в осевом направлении дышла. Существенный недостаток этого известного дышла заключается в том, что оно функционирует только в прицепах с управляемой передней осью и его нельзя устанавливать в прицепах с неподвижным дышлом. Другой недостаток заключается в исключительно зависимом от угла управлении дышлом с возможностью смещения по длине без учета скорости движения автопоезда. Более того, этот известный вид принудительного управления хорошо функционирует, как правило, до тех пор, пока не меняются геометрические соотношения автомобиля и прицепа, то есть пока прицеп постоянно транспортирует один и тот же автомобиль-тягач. Однако когда прицеп транспортируют разные автомобили-тягачи, с отличающимися друг от друга контурами кузова или шасси, при повороте в сторону во время движения по кривой возникает повышенный риск столкновения прицепа с автомобилем-тягачом вследствие слишком незначительно отрегулированного просвета между автомобилем-тягачом и прицепом.
В документе DE 4136334 С1 предложено похожее техническое решение так называемой системы короткой сцепки, также позволяющее транспортирование прицепов с жестким дышлом, однако в этом случае находящийся в прицепе рабочий цилиндр питается от расположенного в автомобиле-тягаче цилиндра-датчика, который опять же принудительно приводится в действие посредством механической передачи в зависимости угла излома между автомобилем-тягачом и прицепом.
Из документа DE 19507034 А1 известно, как предотвращать повреждения грузовых автомобилей с прицепом в вильчатом дышле или в навесных устройствах автомобиля-тягача во время движения задним ходом. Для этого следует предусматривать сцепное устройство для прицепа с установленным с возможностью поворота или амортизировано на поперечине шасси зевом автосцепки, который обязательно совершает поворот с вильчатым дышлом при соответствующем повороте транспортного средства. Для регистрации движения зева сцепного устройства, с двух сторон отверстия зева сцепного устройства, расположены датчики. Датчики вызывают остановку двигателя незадолго до удара вильчатого дышла в шасси или в прочие навесные устройства, поэтому водитель грузовика для приведения в движение транспортного средства сначала снова должен осуществлять другие мероприятия. Известное стопорение вильчатого дышла грузового автомобиля функционирует только при медленном маневрировании во время движения задним ходом и, оно вызывает выключение двигателя при превышении величины заданного места излома между автомобилем и прицепом. Это представляет собой чрезвычайно большую потенциальную угрозу безопасности, а поэтому неприемлемо при скоростном движении по автобану.
Поэтому в основу изобретения положена задача - предоставить систему, при помощи которой при эксплуатации автомобиля автоматически и в зависимости от скорости можно изменять просвет между автомобилем-тягачом и прицепом, как в управляемых, так и в неуправляемых прицепах.
Согласно изобретению задача решается при помощи системы, в которой устройством управления является электронный блок управления, присоединенный для обработки сигнала о скорости к датчику скорости и соединенный с приводным устройством. В соответствии с этим блок управления получает в качестве входного параметра результат измерения фактической скорости движения и выдает соответствующий сигнал, в качестве выходного параметра в приводное устройство. Затем приводное устройство регулирует просвет между автомобилем-тягачом и прицепом в зависимости от скорости движения. Для этого в блок управления может быть введена характеристика, отображающая непрерывную функциональную регулировку просвета в зависимости от фактической скорости движения.
По существу, большой просвет предпочтителен при низких пределах изменения скорости движения, так как отрицательные моменты, касающиеся аэродинамики, почти не проявляются, и автопоезд проходит извилистый участок, как правило, предполагающий большие отклонения вокруг вертикальной оси поворота между автомобилем-тягачом и прицепом. Если, наоборот, передвижение осуществляется по автобану, растет скорость движения, а вместе с ней аэродинамические воздействия большого просвета. Проезжаемые с высокой скоростью радиусы кривой, как правило, большие, поэтому доходит только до незначительных относительных движений между автомобилем-тягачом и прицепом и не следует опасаться столкновения прицепа с шасси автомобиля.
Согласно первому предпочтительному варианту выполнения датчиком скорости является взаимодействующий с коробкой передач сенсорный датчик скорости. Этот вариант выполнения касается модификации автомобиля-тягача и позволяет передавать соответствующей изобретению системе особенно точный и своевременный сигнал, независимо от ее прочей электронной конфигурации.
Предпочтительно датчик скорости может быть также сенсорным датчиком скорости, взаимодействующим с осью прицепа. У этой формы выполнения есть преимущество в том, что все системные компоненты установлены на прицепе, прицеп может быть присоединен к разным автомобилям-тягачам и, достигая, тем не менее, соответствующих изобретению преимуществ. Сенсорный датчик скорости также может альтернативно работать, как датчик частоты вращения колеса или преобразовывать другим способом вращательное движение в единицу времени в сигнал о скорости.
Согласно другому варианту выполнения датчик скорости может быть выполнен в виде антиблокировочной системы (ABS) прицепа. Антиблокировочная система постоянно генерирует сигнал скорости, поэтому можно отказаться от установки и присоединения других датчиков.
В зависимости от технического оборудования автомобиля-тягача в качестве датчика скорости, если имеется в наличии, может служить CAN-Bus(шина сети локальных контроллеров), посредством которой, как правило, можно также снимать сигнал скорости.
Предпочтительно, если тяговую петлю можно механически стопорить относительно тяговой трубы в заданных положениях. Благодаря этому можно достигать блокировки путем геометрического замыкания с прерывистыми интервалами, разгружающей приводное устройство. Блокировку можно производить, в частности, в виде одних или нескольких радиально направленных средств блокировки, входящих в зацепление в тяговой трубе или в тяговой петле и входящих в зацепление в соответствующие отверстия для фиксации в соответственно другом элементе. Для регулирования дышла средство блокировки можно разъединять посредством серводвигателя, например, в виде пневмоцилиндра, из рабочего зацепления с совместимым отверстием для фиксации, так, что становится возможным относительное движение между тяговой петлей и тяговой трубой. После достижения измененного положения средства блокировки устанавливаются снова, и они фиксируют тяговую петлю и тяговую трубу с геометрическим замыканием. Так как способ использования средства блокировки должен осуществляться в аварийной ситуации в данный момент времени, серводвигатель также должен управляться, как и приводное устройство, одним и тем же электронным блоком управления. Приведение в действие вручную было бы слишком медленным, а вследствие этого, по соображениям безопасности и неприемлемым.
Предпочтительным является то, что на тяговой петле и/или на тяговой трубе расположен элемент измерения усилия, выдающий электронному блоку управления зависимый от нагрузки сигнал. Это может быть рациональным, так как нагруженный прицеп в случае экстренного торможения или быстрого объезда предрасположен к значительному изменению управляемости при переходе на режим торможения двигателем. Эти ожидаемые изменения управляемости при переходе на режим торможения двигателем могут приниматься в расчет электронным блоком управления для регулировки автоматического просвета при учете зависимого от нагрузки сигнала. В качестве элемента измерения усилия рассматривают, например, тензорезисторы или пьезоэлектрические датчики.
Предпочтительно, если приводное устройство гидравлическое, электромеханическое или пневматическое. Применение гидравлического рабочего цилиндра предпочтительно. Под электромеханическим приводным устройством понимают приводимый в действие мотором шпиндель, на котором перемещается фиксированная от самовращения ходовая гайка.
В регулируемом дышле в качестве первого участка может быть выполнена тяговая труба, а тяговая петля может содержать второй участок трубы, причем оба участка трубы перекрываются концентрически. При использовании электромеханического привода предпочтительно применение некруглого поперечного сечения, в частности квадратного поперечного сечения или многодугового профиля. В этих вариантах выполнения стопорение самовращения ходовой гайки получают благодаря геометрии участков трубы. Кроме того, выполнение участков трубы, как, по меньшей мере, частично замкнутого полого профиля позволяет защищенно размещать компоненты соответствующей изобретению системы внутри одного полого профиля или обоих полых профилей. Таким образом, предпочтительно приводное устройство может быть расположено внутри одного или обоих участков трубы.
При этом приводное устройство также может приводиться в действие агрегатом, расположенным на или внутри одного или обоих участков трубы. Предпочтительно, если электронный блок управления также размещен на или внутри одного или обоих участков трубы.
Предпочтительно, если электронный блок управления присоединен для обработки сигнала о режиме движения, по меньшей мере, к одному другому датчику сигналов. Это позволяет, в первую очередь, делать еще более точной зависимую от скорости регулировку просвета при движении автопоезда по кривой, причем нижеследующие формы выполнения учитывают в качестве дополнительного параметра действительно данную дистанцию автомобиля от прицепа. Эту дистанцию между автомобилем и прицепом можно устанавливать либо непосредственно при измерении расстояния, либо косвенно при измерении угла.
Если используют датчик расстояния, то он определяет изменение дистанции от прицепа до находящегося перед ним автомобиля-тягача. При этом оказалась особенно благоприятным, если датчик расстояния расположен на передней стороне прицепа. Из этого положения можно особенно эффективно в метрологическом отношении регистрировать иногда сталкивающиеся шасси автомобиля. Более того, вместе с остальными системными компонентами на прицепе также находятся датчики и они делают возможными эксплуатацию системы независимо от оборудования автомобиля. Альтернативно также возможна установка датчиков расстояния на задней стороне автомобиля-тягача и соответственно его кузова.
Целесообразно, если датчик расстояния расположен на некотором расстоянии сбоку к продольной оси автомобиля прицепа. На участке внешних автомобильных углов непосредственно регистрируют фактически имеющийся просвет, так как эти участки в случае движения по кривой автопоезда также первыми сталкиваются с прицепом.
Согласно предпочтительному варианту выполнения датчик сигналов может быть также датчиком угла, расположенным со стороны прицепа, например, на участке поворотного круга и регистрирующим изменение его угла поворота.
Предпочтительно датчик угла является датчиком рулевого управления с возможностью его установки на участке рулевого колеса, рулевых тяг или рулевой передачи и который регистрирует изменение угла поворота рулевого колеса, рулевых тяг или элементов рулевой передачи. Возможные движения по кривой вызываются изменением положения этих элементов системы управления, так что можно регистрировать наиболее своевременный сигнал, прежде чем автопоезд начинает собственно движение по кривой. Это опять же делает возможным своевременное расширение дышла и минимизирует риск столкновения между автомобилем и прицепом.
В качестве другого альтернативного варианта выполнения предлагается предусматривать датчик угла в качестве датчика угла поворота рулевого колеса с возможностью его установки, по меньшей мере, на участке одного переднего колеса автомобиля-тягача и регистрирующего изменение угла поворота этого переднего колеса относительно положения при движении по прямой.
В другом альтернативном варианте выполнения датчиком сигналов является тормозная система присоединенного автомобиля-тягача или прицепа, посылающая соответствующий тормозной сигнал в случае сильного торможения. Этот тормозной сигнал можно использовать в электронном блоке управления для расширения дышла и регулировки большего просвета между автомобилем и прицепом, поскольку торможение до полной остановки также часто сопряжено с последующим объездом.
Предпочтительно, если для регулярной эксплуатации автомобиля в электронный блок управления введены программы управления, при помощи которых в зависимости от скорости движения и измеренной в данный момент датчиком сигналов дистанции или угла определяют положение тяговой петли относительно дышла.
На случай экстренного торможения автопоезда с сопутствующими изменениями управляемости при переходе на режим торможения двигателем или внезапного объезда блок управления может определять по изменению дистанции или угла за единицу времени градиент дистанции или угла и приводить в действие приводное устройство в зависимости от введенного в электронный блок управления градиента дистанции или угла, вследствие чего увеличивается или уменьшается просвет между автомобилем-тягачом и прицепом.
Особенно положительно оказалось, если на оси или на осях автомобиля-тягача и/или прицепа расположен, по меньшей мере, один датчик нагрузки, измеряющий нагрузку на ось и предоставляющий результат измерения электронному блоку управления. Этот датчик нагрузки может быть предусмотрен в качестве дополнения или альтернативно к расположенному в дышле элементу измерения усилия. Также этим путем идентифицируют нагруженный или пустой прицеп и учитывают ожидаемый режим движения при регулировке просвета.
Изобретение поясняется чертежами, на которых представлено следующее:
фиг.1 - вид сбоку автопоезда с различным регулируемым просветом;
фиг.2 - вид сбоку дышла с возможностью выдвигания согласно первому варианту выполнения;
фиг.3 - вид сбоку дышла с возможностью выдвигания согласно второму предпочтительному варианту выполнения;
фиг.4 - схематичный вид сверху автопоезда с другим датчиком сигналов в виде датчика расстояния;
фиг.5 - схематичный вид сверху автопоезда с другим датчиком сигналов в виде датчика угла на участке поворотного круга;
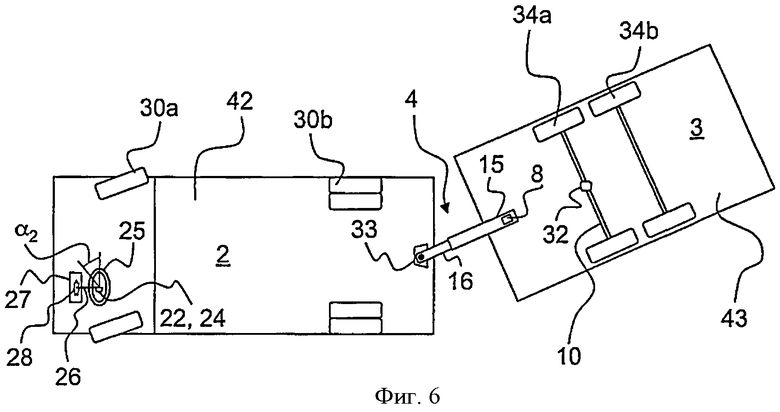
фиг.6 - схематичный вид сверху автопоезда с другим датчиком сигналов в виде датчика рулевого управления;
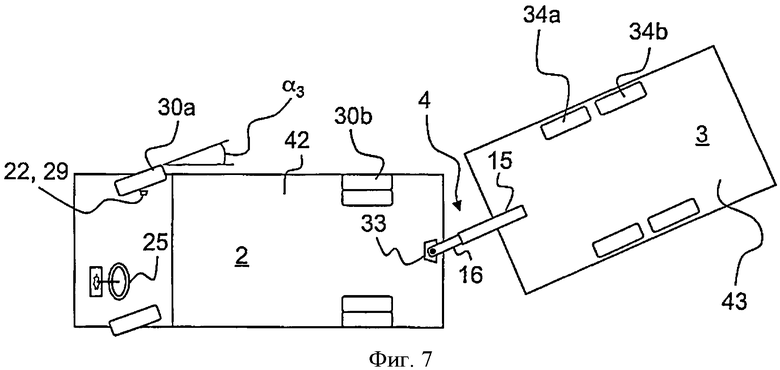
фиг.7 - схематичный вид сверху автопоезда с другим датчиком сигналов в виде датчика угла поворота рулевого колеса.
На фиг.1 показан вид сбоку автопоезда, состоящего из автомобиля-тягача 2 и присоединенного к нему прицепа 3. Как автомобиль-тягач 2, так и прицеп 3 имеют кузов 42, 43, используемый для перевозки товаров. Как правило, автомобиль-тягач 2 имеет передние колеса 30а с возможностью управления и приводные задние колеса 30b.
Прицеп 3 имеет так называемую двухосную тележку с расположенными в направлении движения рядом друг с другом передними колесами 34а и задними колесами 34b. Обе пары колес 34а, 34b не управляемы в направлении движения. Механическое соединение прицепа 3 с автомобилем-тягачом 2 выполнено посредством дышла 4, содержащего тяговую трубу 5, на переднем конце которой сформована тяговая петля 6. Тяговую петлю 6 вводят перед началом движения в расположенную неподвижно на автомобиле-тягаче 2 пальцевую муфту 33 и фиксируют с геометрическим замыканием при помощи не показанного далее соединительного шкворня. Дышло 4 жестко входит в зацепление с прицепом 3. Для этого в дышле 4 может быть предусмотрена монтажная консоль 38, привинченная со своей стороны к шасси прицепа.
Между автомобилем-тягачом 2 и прицепом 3 имеется просвет 1, выполненный на верхнем изображении с максимальной дистанцией х max и с минимальной дистанцией х min - на нижнем изображении. Большая дистанция х max делает возможным маневрирование и движение с узким радиусом поворота, причем обращенный к прицепу 3 угол кузова 42 и обращенный к автомобилю-прицепу угол кузова 43 могут приближаться к внутренней стороне кривой, не сталкиваясь друг с другом и не вызывая повреждения. При быстром движении автопоезда по прямой не возможны никакие резкие объезды, так что дистанцию х между автомобилями 2 и прицепом 3 можно сокращать, а вследствие этого и просвет 1. В результате получают более лучшее перетекание зазора 1 и уменьшение завихрений, вследствие чего уменьшается расход топлива автопоезда и выброс вредных веществ.
Регистрация фактической скорости движения происходит имманентно посредством находящегося на прицепе 3 датчика 9 скорости. Датчик 9 скорости в форме выполнения согласно фиг.1 является сенсорным датчиком 11 скорости, расположенным на одной из осей 10 прицепа 3. Фактическую скорость прицепа 3 определяют из числа оборотов оси 10 за единицу времени и перерабатывают в электронном блоке 8 управления (смотри фигуры 2 и 3) в сигнал для регулировки дистанции х.
Уменьшение дистанции х происходит при выдвигании дышла 4. Неподвижно входящая в зацепление с прицепом 3 тяговая труба 5 образует первый участок 15 трубы, в котором фиксирован с возможностью перемещения смещаемый в продольном направлении автомобиля второй участок 16 трубы. Тяговая петля 6 является неразделимо соединенной составной частью второго участка 16 трубы.
Регулируемый в данный момент интервал х регистрируют посредством расположенного на задней стороне автомобиля 2 датчика 19 расстояния и учитывают при регулировке предусмотренного просвета 1.
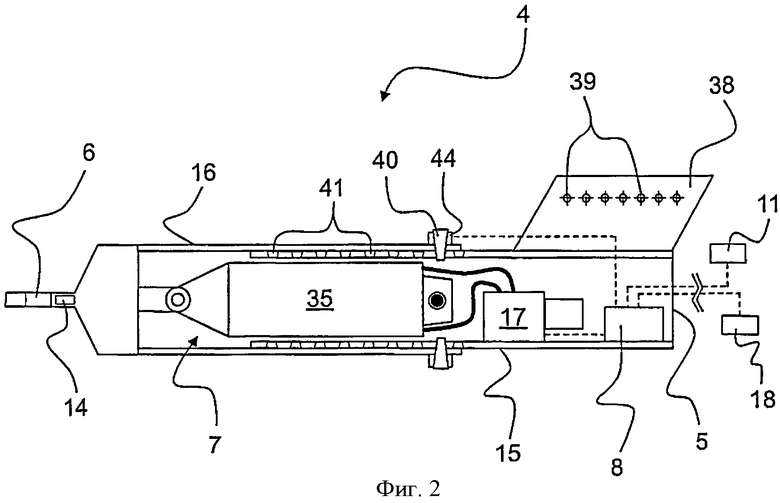
На фиг.2 показана первая форма выполнения дышла 4 с возможностью выдвигания дышла 4, вид сбоку. Дышло 4 содержит меньший по диаметру первый участок 15 трубы с предпочтительно круглым поперечным сечением, соединенный неразделимо с монтажной консолью 38. Монтажная консоль 38 имеет в свою очередь в своем верхнем участке несколько сверлений 39 для фиксации дышла 4 на прицепе 3.
На первый участок 15 трубы соосно надвинут больший по диаметру второй участок 16 трубы и фиксирован с возможностью перемещения в осевом направлении посредством приводного устройства 7. Приводное устройство 7 содержит цилиндр 35 с рабочей жидкостью и находится, по меньшей мере, частично внутри контура первого участка 15 трубы. Цилиндр 35 с рабочей жидкостью неподвижно фиксирован своим первым, обращенным к прицепу 3 концом внутри первого участка 15 трубы. Второй противоположный конец цилиндра 35 с рабочей жидкостью находится внутри контура второго участка 16 трубы и фиксирован в нем неподвижно. Кроме того, второй участок 16 трубы несет тяговую петлю 6 для фиксации с возможностью отделения дышла 4 в пальцевой муфте 33 автомобиля 2 (см. фиг.1). Приведение в действие цилиндра 35 с рабочей жидкостью позволяет линейно перемещать второй участок 16 трубы с выполненной в нем тяговой петлей 6 относительно первого участка 16 трубы.
Цилиндр 35 с рабочей жидкостью постоянно соединен с агрегатом 17 в виде приводимого в действие электрически насоса, в частности гидронасоса. Приведение в действие агрегата 17 происходит автоматически посредством электронного блока 8 управления. Как агрегат 17, так и электронный блок 8 управления размещены предпочтительно внутри первого и/или второго участка 15, 16 трубы, причем особенно подходит неподвижно фиксированный относительно прицепа 3 участок 15, 16 трубы - в данном варианте выполнения первый участок 15 трубы.
Электронный блок 8 управления соединен через каналы передачи данных, по меньшей мере, с одним сенсорным датчиком 11 скорости. Кроме того, в качестве других входных параметров электронный блок 8 управления может обрабатывать данные от другого датчика 18 сигналов и от расположенного на дышле 4 элемента 14 измерения усилия.
Для разгрузки приводного устройства 7 при достижении квазистационарного эксплуатационного режима, в стенке по периферии подвижного второго участка 16 трубы на противоположных сторонах расположены средства 40 блокировки, входящие в опущенном положении в зацепление с геометрическим замыканием в совместимые фиксирующие отверстия 41 первого участка 15 трубы. Множество смещенных в осевом направлении друг к другу фиксирующих отверстий 41 делает возможным блокировку в различных положениях.
При изменении положения дышла 4 приводное устройство 7 выдвигает второй участок 16 трубы при управлении электронного блока 8 управления с прерывистыми интервалами, так что средство 40 блокировки может опускаться в близлежащее фиксирующее отверстие 41. Поднимание и опускание средств 40 блокировки происходит посредством серводвигателей 44, приводимых в действие предпочтительно сжатым воздухом. Серводвигатели 44 также непосредственно присоединены к электронному блоку 8 управления.
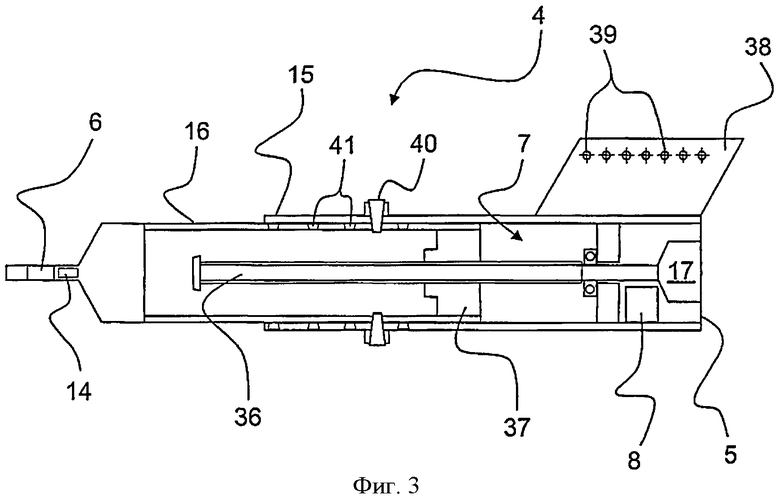
На фиг.3 показан предпочтительный вариант выполнения дышла 4 с возможностью выдвигания, в котором в качестве приводного устройства 7 вместо цилиндра 35 с рабочей жидкостью используют электромеханический привод с приводимым в действие агрегатом 17 шпинделем 36 и с перемещающейся на нем гайкой 37 шпинделя. При этом шпиндель 36 установлен неподвижно в своем осевом направлении, однако, с возможностью поворота в первом участке 15 трубы. Гайка шпинделя 36 фиксирована устойчиво к повороту во втором участке 16 трубы и выдвигает его, в зависимости от направления поворота шпинделя 35, в первый участок 15 трубы.
В показанном согласно фиг.3 варианте выполнения неподвижно установленный на прицепе 3 первый участок 15 трубы выполнен с большим диаметром, а второй участок 16 трубы - с маленьким диаметром, поэтому первый участок трубы 15 соосно вмещает, по меньшей мере, частично второй участок 16 трубы. Самовращения гайки 37 шпинделя и соответственно второго участка 16 трубы относительно первого участка 15 трубы можно избежать, в частности, при отказе от круглого поперечного сечения трубы. Особенно подходят для этого, в частности, прямоугольные или многоугольные или эллиптические поперечные сечения. Если второй участок 16 трубы должен иметь круглое поперечное сечение, для опоры стенки трубы от самовращения можно также использовать проходящие в осевом направлении планки.
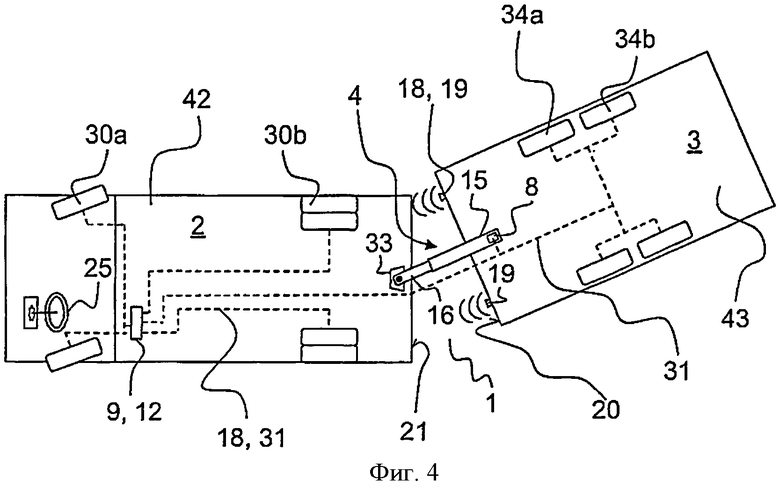
На фиг.4 показан схематичный вид сверху на образованный автомобилем-прицепом 3 автопоезд. Автомобиль-тягач 2 и прицеп 3 оборудованы антиблокировочной системой 12, из которой в любое время можно снимать сигнал скорости. В данном случае антиблокировочная система 12 служит как датчик 9 скорости для электронного блока 8 управления. Эта форма выполнения предпочтительна, когда можно отказаться от собственного сенсорного датчика 11 скорости со стороны прицепа 3 для регистрации фактической скорости движения.
В качестве другого входного параметра электронный блок 8 управления данных получает данные от другого датчика 18 сигналов в виде двух расположенных на передней стороне 20 прицепа 3 датчиков 19 расстояния. Датчики 19 расстояния соответственно направлены в направлении движения прицепа 3 и определяют самую короткую дистанцию х (см. фиг.1) до задней стороны 21 автомобиля-тягача 2 на противоположных сторонах дышла 4.
Как только один из датчиков 19 расстояния распознает сокращение заданной минимальной дистанции, электронный блок 8 управления приводит в действие приводное устройство 17 (см. фиг.2 и 3), увеличивающее длину дышла 4, а вследствие этого - величину просвета 1 посредством раздвигания первого и второго участка 15, 16 трубы. Для предотвращения столкновения прицепа 3 и автомобиля-тягача 2, раздвигание дышла 4 должно происходить независимо от регистрируемой скорости движения автопоезда при сокращении минимальной дистанции.
Регулируемая посредством антиблокировочной системы 12 тормозная система 31 может также функционировать в качестве другого датчика 18 сигналов. Как только водитель приводит в действие тормозную систему 31, электронный блок 8 управления также получает соответствующий сигнал, который можно использовать для увеличения дистанции х между автомобилем-тягачом 2 и прицепом 3 посредством раздвигания дышла 4. При начале резкого торможения тормозная система 31 задействована первая по времени, поэтому электронному блоку 8 управления очень рано предоставляется сигнал об увеличении дистанции х, независимо от фактически измеренной скорости автопоезда.
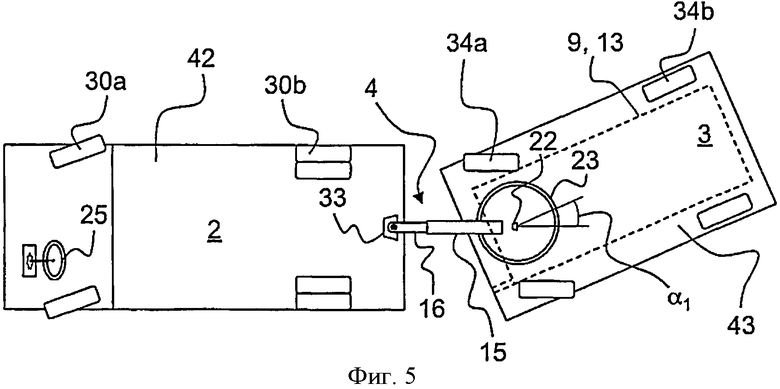
На фиг.5 показан предпочтительный вариант выполнения соответствующей изобретению системы, в которой минимальную дистанцию между прицепом 3 и автомобилем-тягачом 2 устанавливают косвенно, по изменению относительного угла между прицепом 3 и автомобилем-тягачом 2.
Если речь идет об управляемом прицепе 3, он имеет под своим кузовом 43 поворотный круг 23. Изменение угла α1 поворота поворотного круга 23 относительно движения по прямой измеряется датчиком 22 угла и направляется в находящийся внутри дышла 4 электронный блок 8 управления. При превышении заданного максимального угла α1 поворота посредством электронного блока 8 управления происходит выдвигание дышла 4. Напротив, при сокращении максимального угла α1 поворота дышло 4 можно укорачивать.
В качестве датчика 9 скорости для электронного блока 8 управления в форме выполнения согласно фиг.5 служит шина 13 сети локальных контроллеров.
На фиг.6 измерение угла также происходит посредством датчика 22 угла в виде датчика 24 рулевого управления. В этом случае датчик 22 угла, вследствие неподвижно входящего в зацепление с прицепом 3 дышла 4, установлен не на прицепе 3, а на автомобиле-тягаче 2 и измеряет угол α2 поворота рулевого колеса. Угол α2 поворота рулевого колеса можно снимать, в частности, на рулевом колесе 25, в рулевых тягах 26 или в элементах 28 рулевой передачи 27, в частности, шестернями передачи. Установленный ими результат измерения передается по беспроводным или проводным линиям передачи данных от автомобиля-тягача 2 в расположенный на прицепе электронный блок 8 управления.
Расположенный на прицепе 3 датчик 32 нагрузки регистрирует состояние загрузки и предоставляет в распоряжение электронному блоку 8 управления соответствующий результат измерения. При полной загрузке электронный блок 8 управления может соответствующим образом регулировать в рамках заданных предельных значений соответственно большую дистанцию х и компенсировать вследствие этого изменения управляемости прицепа 3 при переходе на режим торможения двигателем. Датчик 32 нагрузки расположен предпочтительно между одной из осей 10 и кузовом 43.
На фиг.7 показан еще один предпочтительный вариант выполнения изобретения, в котором угол поворота непосредственно регистрируют посредством расположенного на участке управляемых передних колес 30а автомобиля-тягача 2 датчика 29 угла поворота рулевого колеса. Под углом поворота α3 понимают боковое положение передних колес 30а относительно движения по прямой. Полученный на автомобиле-тягаче 2 результат измерения передают по линии передачи данных или беспроводной линии связи на прицеп 3 и предоставляют электронному блоку 8 управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОПОЕЗД С ЭЛЕКТРОДИНАМИЧЕСКИМ УСТРОЙСТВОМ СТАБИЛИЗАЦИИ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ПРИЦЕПА | 2024 |
|
RU2832365C1 |
| ДВУХЗВЕННЫЙ АВТОПОЕЗД | 2013 |
|
RU2535809C2 |
| АВТОПОЕЗД | 2004 |
|
RU2264943C1 |
| АВТОПОЕЗД | 2013 |
|
RU2543130C2 |
| АВТОПОЕЗД | 2011 |
|
RU2457141C1 |
| СИСТЕМА ПРИНУДИТЕЛЬНОГО УПРАВЛЕНИЯ | 2009 |
|
RU2515620C2 |
| ПРИНУДИТЕЛЬНОЕ УПРАВЛЕНИЕ | 2010 |
|
RU2558417C2 |
| Стабилизирующее сцепное устройство одноосного прицепа | 2023 |
|
RU2811193C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ СЦЕПНОЕ УСТРОЙСТВО ПРИЦЕПА | 2015 |
|
RU2613140C2 |
| Тормоз наката с механизмом стабилизации движения одноосного прицепа | 2023 |
|
RU2820724C1 |
Система содержит дышло (4) с тяговой трубой (5) и с расположенной на ней с конечной стороны тяговой петлей (6), электронный блок (8) управления. Тяговая петля (6) выполнена с возможностью перемещения относительно тяговой трубы (5) посредством приводного устройства (7) в продольной оси автомобиля по заданному пути перемещения. Электронный блок (8) управления присоединен для обработки сигнала о скорости к датчику (9) скорости и соединен с приводным устройством (7). В электронный блок (8) управления введена характеристика, отображающая непрерывную функциональную регулировку просвета (1) в зависимости от фактической скорости движения. Достигается регулировка просвета между тягачом и прицепом в зависимости от фактической скорости движения, как в управляемых, так и в неуправляемых прицепах. 15 з.п. ф-лы, 7 ил.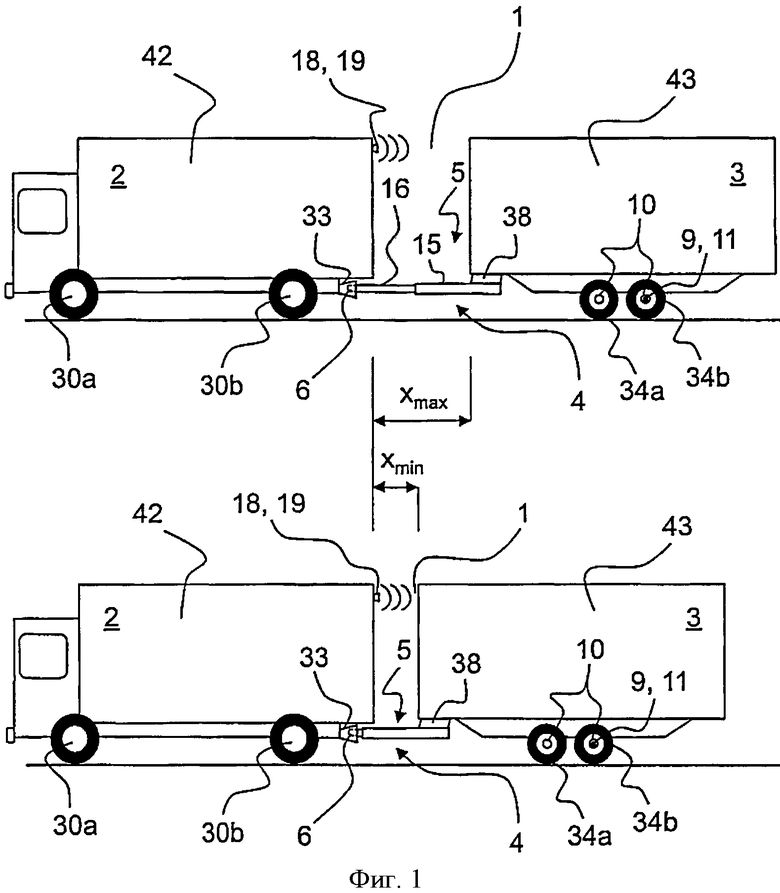
1. Система для автоматической регулировки просвета (1) между автомобилем-тягачом (2) и присоединенным к нему прицепом (3), содержащая дышло (4), выполненное с возможностью смещения по длине, с тяговой трубой (5) и с расположенной на ней с конечной стороны тяговой петлей (6), причем тяговая петля (6) выполнена с возможностью перемещения относительно тяговой трубы (5) посредством приводного устройства (7) в продольной оси автомобиля по заданному пути перемещения, и содержащая устройство управления, причем устройство управления выполнено в виде электронного блока (8) управления, присоединенного для обработки сигнала о скорости к датчику (9) скорости и соединенного с приводным устройством (7), отличающаяся тем, что в электронный блок (8) управления введена характеристика, отображающая непрерывную функциональную регулировку просвета (1) в зависимости от фактической скорости движения.
2. Система по п.1, отличающаяся тем, что датчик скорости выполнен в виде взаимодействующего с коробкой передач сенсорного датчика скорости.
3. Система по п.1, отличающаяся тем, что датчик скорости выполнен в виде сенсорного датчика (11) скорости, взаимодействующего с осью (10) прицепа (3).
4. Система по п.1, отличающаяся тем, что датчик (9) скорости выполнен из антиблокировочной системы (12) прицепа (3) или автомобиля-тягача (2).
5. Система по п.1, отличающаяся тем, что датчик (9) скорости выполнен из шины (13) сети локальных контроллеров.
6. Система по любому из пп.1-5, отличающаяся тем, что приводное устройство (7) является гидравлическим, электромеханическим или пневматическим.
7. Система по любому из пп.1-5, отличающаяся тем, что тяговая труба (5) выполнена в виде первого участка (15), а тяговая петля (6) содержит второй участок (16) трубы, причем оба участка (15, 16) трубы перекрываются.
8. Система по п.7, отличающаяся тем, что приводное устройство (7) расположено внутри одного или обоих участков (15, 16) трубы.
9. Система по п.7, отличающаяся тем, что приводное устройство (7) приводят в действие агрегатом (17), расположенным на или внутри одного или обоих участков (15, 16)трубы.
10. Система по п.7, отличающаяся тем, что электронный блок (8) управления размещен на или внутри одного или обоих участков (15, 16) трубы.
11. Система по любому из пп.1-5, отличающаяся тем, что электронный блок (8) управления присоединен для обработки сигнала о режиме движения, по меньшей мере, к одному другому датчику (18) сигналов.
12. Система по п.11, отличающаяся тем, что датчик сигналов выполнен в виде датчика (19) расстояния, определяющего изменение дистанции от прицепа до расположенного перед ним автомобиля-тягача.
13. Система по п.11, отличающаяся тем, что датчик сигналов выполнен в виде датчика (22) угла.
14. Система по п.12, отличающаяся тем, что датчик (22) угла расположен на участке поворотного круга (23) и предназначен для регистрирования изменения его угла (α1) поворота.
15. Система по п.13, отличающаяся тем, что датчик угла выполнен в виде датчика (24) рулевого управления с возможностью его установки на участке рулевого колеса (25), рулевых тяг (26) или рулевой передачи (27) и предназначен для регистрирования изменения угла (α2) поворота рулевого колеса (25), рулевых тяг (26) или элементов (28) рулевой передачи (27).
16. Система по п.13, отличающаяся тем, что датчик угла выполнен в виде датчика (29) угла поворота рулевого колеса с возможностью его установки, по меньшей мере, на участке одного переднего колеса (30а) автомобиля-тягача (2) и регистрирующего изменение его угла (α3) поворота.
| ЖИДКАЯ ЛЕКАРСТВЕННАЯ ФОРМА РИСПЕРИДОНА И СПОСОБ ЕЕ ПОЛУЧЕНИЯ | 2016 |
|
RU2646812C1 |
| ОБРАЗУЮЩЕЕ АЭРОЗОЛЬ ИЗДЕЛИЕ, СОДЕРЖАЩЕЕ МАГНИТНЫЕ ЧАСТИЦЫ | 2015 |
|
RU2692202C2 |
| DE 3728477 A1, 16.03.1989 | |||

