Область техники
Настоящее изобретение относится к управляющему устройству и способу управления для бесступенчато регулируемой трансмиссии.
Уровень техники
Далее описано управляющее устройство для бесступенчато регулируемой трансмиссии согласно JP 2004-183854 A. Когда имеется запрос на ускорение с понижением передачи, характеристика понижения передачи и характеристика повышения передачи соответственно определяются на основании нажатия педали акселератора и скорости транспортного средства, и целевое передаточное число при понижении передачи, подавляемое больше, чем нормальное целевое передаточное число, и целевое передаточное число при повышении передачи вычисляются на основании этих характеристик передачи. После понижения на целевое передаточное число при понижении передачи управление передачей выполняется вдоль виртуальной линии передачи, сдвигаемой согласно целевому передаточному числу при повышении передачи. В это время линия передачи во время ускорения задается согласно скорости транспортного средства в начале ускорения. Передаточное число задается на уменьшение с увеличением скорости транспортного средства в начале ускорения, если нажатие педали акселератора является одинаковым. Передаточное число задается таким образом для того, чтобы предотвратить возникновение так называемого ощущения резиновой ленты, при котором тяговое усилие не увеличивается так, как это ожидается, несмотря на увеличение скорости вращения двигателя, и у водителя возникает ощущение несоответствия, как будто двигатель работает вхолостую.
Краткое описание изобретения
Управляющее устройство согласно JP 2004-183854 A выполнено так, что намерение водителя совершить ускорение определяется на основании нажатия педали акселератора, и скорость транспортного средства в начале ускорения обновляется, когда определяется намерение совершить ускорение. Таким образом, в случае ускорения посредством дальнейшего нажатия на педаль акселератора во время езды в состоянии умеренного ускорения может возникнуть ощущение резиновой ленты. Для того чтобы описать это точнее, представим себе случай, в котором, например, транспортное средство въезжает в основной ряд, при этом ускоряясь на разгонном ряде, при входе на скоростную дорогу, и осуществляет перестроение между рядами и еще больше ускоряется для обгона. В этом случае, поскольку нажатие педали акселератора является относительно большим во время въезда, намерение совершить ускорение может быть не определено, даже если нажатие педали акселератора увеличивается с целью ускорения для обгона. Если намерение совершить ускорение не определено, скорость транспортного средства в начале ускорения сохраняется относительно низкой во время начала ускорения на разгонном ряде, и задается линия переключения, соответствующая этой скорости транспортного средства в начале ускорения. Таким образом, управление передачей выполняется согласно линии переключения, заданной при относительно низкой скорости транспортного средства, и возникает ощущение резиновой ленты, поскольку нажатие педали акселератора увеличивается при относительно высокой скорости транспортного средства после входа.
Соответственно задачей настоящего изобретения является создание управляющего устройства для бесступенчато регулируемой трансмиссии, выполненного с возможностью предотвращения возникновения ощущения резиновой ленты в случае дальнейшего увеличения нажатия педали акселератора во время ускорения.
Для решения указанной задачи настоящее изобретение включает в себя средство определения рабочего состояния для определения рабочего состояния транспортного средства, включающего в себя скорость транспортного средства и нажатие педали акселератора, управляющее средство для управления передаточным числом бесступенчато регулируемой трансмиссии на основании рабочего состояния, средство определения запроса на ускорение для определения присутствия или отсутствия запроса на ускорение от водителя на основании нажатия педали акселератора, и средство задания передаточного числа для задания уменьшения коэффициента уменьшения скорости, управляемого управляющим средством, с увеличением скорости транспортного средства в начале ускорения, если нажатие педали акселератора является одинаковым во время ускорения. К тому же, управляющее средство обновляет скорость транспортного средства в начале ускорения до скорости транспортного средства во время определения после определения того, что нажатие педали акселератора было увеличено во время ускорения.
Подробности, другие признаки и преимущества этого изобретения описаны в последующем описании и показаны на прилагаемых чертежах.
Краткое описание чертежей
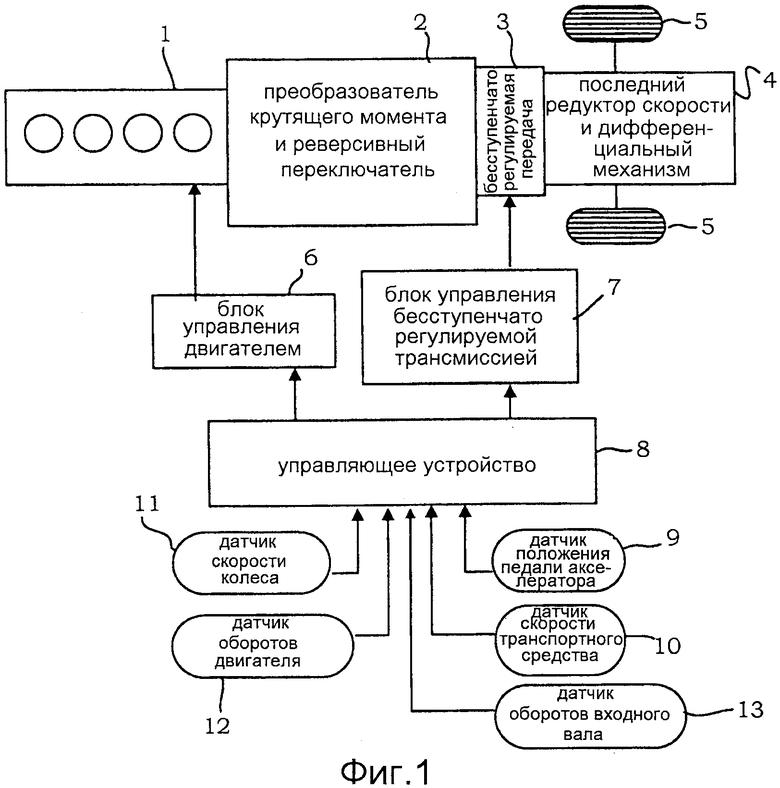
Фиг. 1 - схематичная диаграмма конфигурации транспортного средства согласно первому варианту осуществления настоящего изобретения;
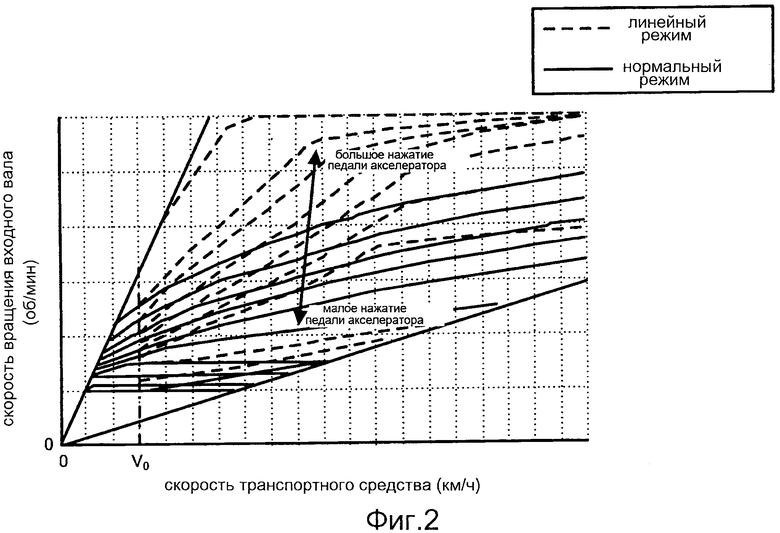
Фиг. 2 - график, на котором показаны примеры линий переключения в нормальном режиме и линейном режиме;
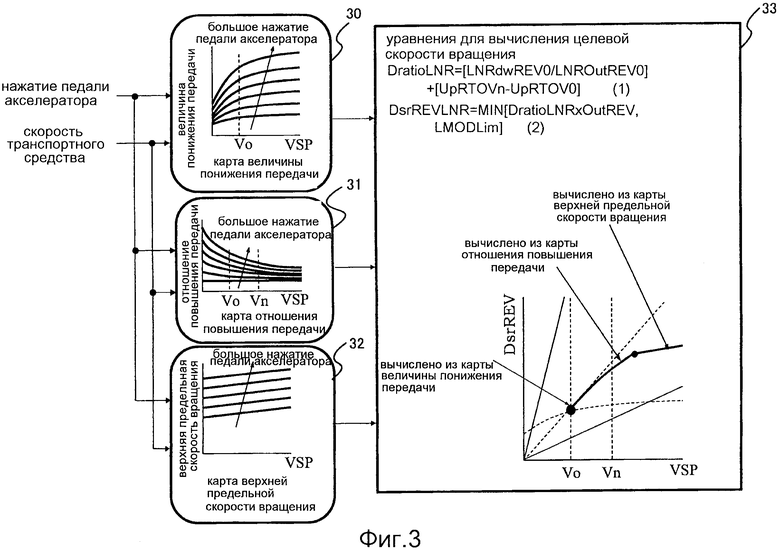
Фиг. 3 - блок-схема управления образованием линии переключения, выполняемого блоком управления бесступенчато регулируемой трансмиссией в линейном режиме;
Фиг. 4 - блок-схема, на которой показана программа обновления скорости транспортного средства в начале ускорения, выполняемая блоком управления бесступенчато регулируемой трансмиссией во время линейного режима;
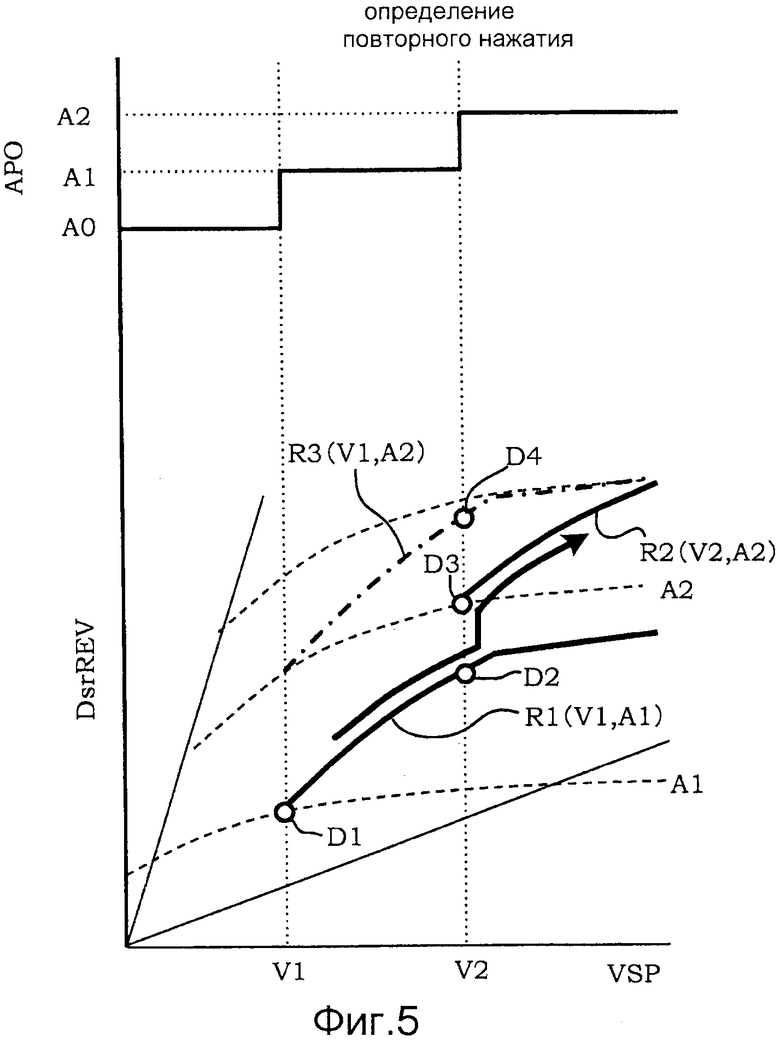
Фиг. 5 - график, на котором показаны эффекты в случае выполнения программы управления с Фиг. 4;
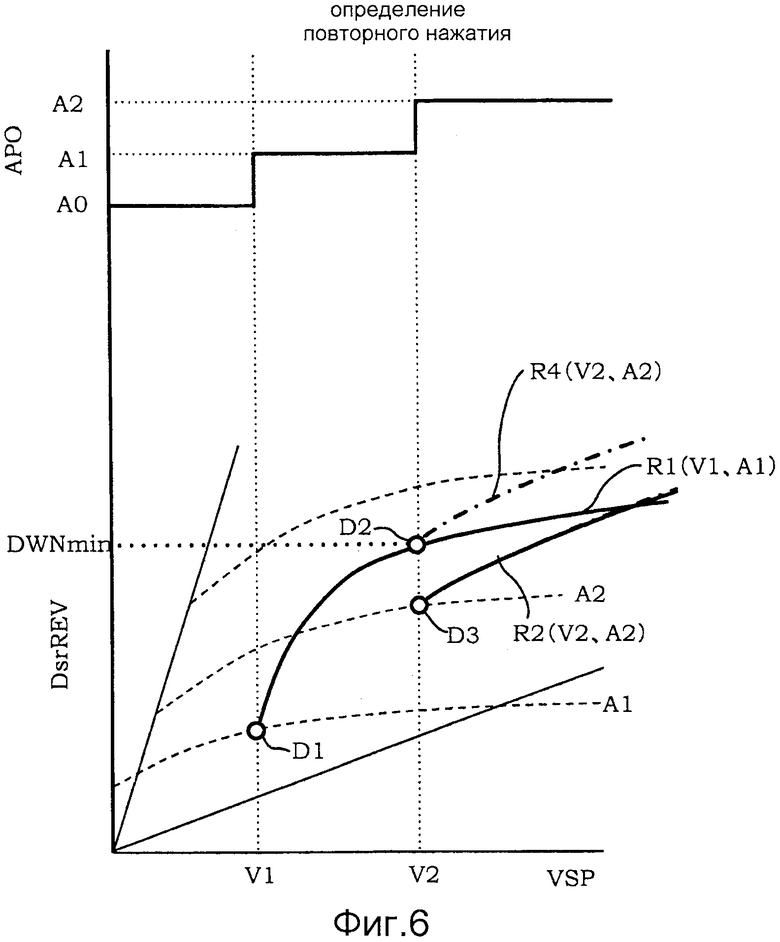
Фиг. 6 - график, на котором показан способ образования линии переключения второго варианта осуществления; и
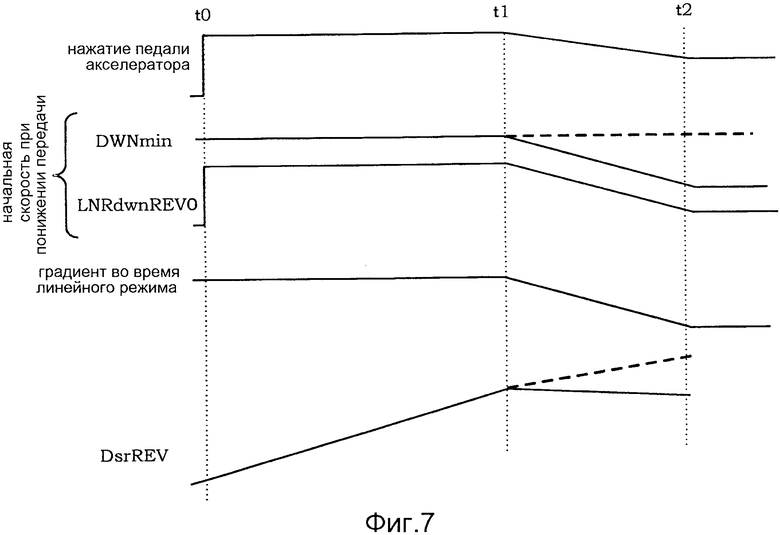
Фиг. 7 - временная диаграмма в случае осуществления операции возврата нажатия педали акселератора после повторного ускорения.
Подробное описание вариантов осуществления изобретения
Первый вариант осуществления изобретения
На Фиг. 1 показана схематичная конфигурация транспортного средства, предусмотренного с устройством управления передачей согласно настоящему изобретению. Тяговое усилие двигателя 1 внутреннего сгорания передается к ведущим колесам 5 через преобразователь крутящего момента и реверсивный переключатель 2, бесступенчато регулируемую передачу 3, и последний редуктор скорости и дифференциальный механизм 4.
Управление количеством впрыскиваемого топлива, управление моментом зажигания и тому подобное для двигателя 1 внутреннего сгорания 1 выполняются блоком 6 управления двигателем 6.
Передаточное число бесступенчато регулируемой трансмиссии 3 бесступенчато управляется посредством блока 7 управления бесступенчато регулируемой трансмиссией.
Управляющее устройство 8 вместе с каждым блоком 6, 7 управления состоит из микрокомпьютера и его периферийных устройств и осуществляет всестороннее управление транспортным средством. К управляющему устройству 8 присоединены датчик 9 положения педали акселератора для определения нажатия педали акселератора, датчик 10 скорости транспортного средства для определения скорости хода транспортного средства, датчик 11 скорости колеса для определения скорости вращения ведущих колес 5, датчик 12 оборотов двигателя для определения скорости вращения двигателя 1 внутреннего сгорания, датчик 13 скорости вращения входного вала 13 для определения скорости вращения входного вала бесступенчато регулируемой трансмиссии 3 и так далее. Блок 7 управления бесступенчато регулируемой трансмиссией соответствует управляющему средству настоящего изобретения, и датчик 9 положения педали акселератора и датчик 10 скорости транспортного средства соответствуют средству определения рабочего состояния настоящего изобретения.
Следует отметить, что в последующем описании бесступенчато регулируемая трансмиссия ременного типа с механизмом раздвижного шкива подразумевается под бесступенчато регулируемой трансмиссией 3, и передаточное число в некоторых случаях выражается посредством передаточного числа шкива. Передаточное число шкива или передаточное число является синонимом коэффициента уменьшения скорости, то есть его величина выражает отношение скорость вращения входного шкива/скорость вращения выходного шкива.
Блок 7 управления бесступенчато регулируемой трансмиссией обычно выполняет режим управления для управления изменением передаточного числа на основании нажатия педали акселератора и скорости транспортного средства (далее в этом документе это называется нормальным режимом). Когда удовлетворяется заданное условие ускорения, осуществляется переключение на режим управления для подавления изменения передаточного числа более чем в нормальном режиме (далее в этом документе это называется линейным режимом). Это переключение от нормального режима на линейный режим осуществляется известной программой управления, такой как описанная в JP 2002-372143 A.
Фиг. 2 представляет собой график, на котором показаны примеры линий переключения в нормальном и линейном режимах. Вертикальная ось представляет собой скорость вращения входного вала бесступенчато регулируемой трансмиссии 3, горизонтальная ось представляет скорость транспортного средства, сплошные линии на Фиг. 2 представляют линии переключения в нормальном режиме, и пунктирные линии на Фиг. 2 представляют линии переключения в линейном режиме. К тому же скорость V0 транспортного средства представляет собой скорость транспортного средства, когда заданное условие ускорения удовлетворено, то есть скорость транспортного средства, при которой происходит переключение на линейный режим.
В линейном режиме изменение передаточного числа подавляется больше, чем в нормальном режиме. Соответственно увеличение скорости вращения входного вала, связанное с увеличением скорости транспортного средства, больше в линейном режиме, чем в нормальном режиме. Это осуществляет ускорение, совпадающее с ощущением водителя, заключающимся в том, что скорость транспортного средства увеличивается с увеличением скорости вращения двигателя во время ускорения.
Фиг. 3 представляет собой блок-схему управления, выполняемого блоком 7 управления бесступенчато регулируемой трансмиссией на линейном режиме.
Скорость VSP транспортного средства, определенная датчиком 10 скорости транспортного средства, и нажатие APO педали акселератора, определенное датчиком 9 положения педали акселератора, соответственно вводятся на карту 30 скорости вращения при понижении передачи, карту 31 скорости вращения при повышении передачи и карту 32 верхнего предела скорости вращения.
Карта 30 скорости вращения при понижении передачи является картой для вычисления скорости LNRdwREV0 вращения при понижении передачи во время начала ускорения.
Карта 31 скорости вращения при повышении передачи является картой для вычисления передаточного числа во время линейного режима.
Карта верхнего предела скорости вращения является картой для вычисления верхнего предела LMODLim скорости вращения скорости вращения входного вала. Следует заметить, что любая из карт задается для каждого нажатия APO педали акселератора, и величина вычисляется из величин до и после посредством дополнительной операции, если отсутствует величина, соответствующая входному нажатию APO педали акселератора.
Результат вычисления каждой карты вводится в блок 33 образования линии переключения.
В блоке 33 образования линии переключения скорость вращения входного вала бесступенчато регулируемой трансмиссии 3 во время линейного режима (далее в этом документе, называемая целевой входной скоростью DsrREV вращения CVT) вычисляется в следующей процедуре. Сначала определяется целевая входная скорость DsrREV вращения CVT при скорости V0 транспортного средства на основании скорости LNRdwREV0 вращения при понижении передачи, вычисленной на карте 30 скорости вращения при понижении передачи. Затем определяется линия переключения согласно характеристике изменения передаточного числа, вычисленной на карте 31 скорости вращения при повышении передачи. Затем верхний предел целевой входной скорости DsrREV вращения CVT ограничивается верхним пределом LMODLim скорости вращения, вычисленным на карте 32 верхнего предела скорости вращения. Таким образом, образуется линия переключения во время линейного режима. Эта процедура выражена посредством Уравнений (1), (2).
Первый член Уравнения (1), то есть [LNRdwREV0/LNROutREV0] представляет собой преобразование скорости вращения в передаточное число посредством деления скорости LNRdwREV0 вращения при понижении передачи во время начала ускорения на скорость LNROutREV0 вращения выходного вала. Таким же образом второй член [UpRTOVn-UpRTOV0] представляет собой градиент изменения передаточного числа во время линейного режима.
Целевая скорость вращения во время линейного режима вычисляется посредством Уравнения (2). В частности, передаточное число преобразуется в скорость вращения посредством умножения целевого передаточного числа, вычисленного посредством Уравнения (1), на скорость OutREV вращения выходного вала, и меньшее значение из этого и верхнего предела LMODLim скорости вращения выбирается и задается как целевая входная скорость DsrREV вращения CVT.
Фиг. 4 представляет собой блок-схему, на которой показана программа обновления скорости транспортного средства в начале ускорения, выполняемая блоком 7 управления бесступенчато регулируемой трансмиссией во время линейного режима. Эта программа управления предназначена для обновления скорости V0 транспортного средства в начале ускорения от скорости транспортного средства, заданной, когда происходит переключение на линейный режим, до скорости транспортного средства, когда педаль акселератора нажимается дальше, если водитель нажимает педаль акселератора дальше, пока выполняется линейный режим. Эффекты этого описаны позже. Эта программа описана ниже согласно этапам блок-схемы.
На Этапе S100 блок 7 управления бесступенчато регулируемой трансмиссией определяет, выполняется ли линейный режим или нет. Выполнение Этапа S110 происходит, если выполняется линейный режим, тогда как выполнение Этапа S130 происходит, пока линейный режим не выполняется.
На Этапе S110 блок 7 управления бесступенчато регулируемой трансмиссией выполняет определение повторного нажатия на основании определенной величины датчика 9 положения педали акселератора и выполняет обработку Этапа S120, если педаль акселератора была нажата, в это же время выполняя обработку Этапа S130, если педаль акселератора не была нажата.
Определение повторного нажатия предназначено для определения, существует или нет намерение осуществить дальнейшее ускорение во время выполнения линейного режима. Например, наличие намерения осуществить дальнейшее ускорение определяется, если нажатие APO педали акселератора больше, чем пороговая величина A, заданная заранее, и скорость нажатия педали акселератора выше, чем пороговая величина B, заданная заранее. Пороговая величина A задана, например, при нажатии около 2/8 от полного хода. К тому же пороговая величина B задана, например, при 20 [градусов в секунду]. Следует отметить, что дальнейшее ускорение во время выполнения линейного режима в последующем описании называется "повторным ускорением".
На Этапе S120 блок 7 управления бесступенчато регулируемой трансмиссией обновляет скорость V0 транспортного средства в начале ускорения и на этот раз заканчивает процесс. Здесь, когда обновляется скорость V0 транспортного средства в начале ускорения, образуется новая линия переключения согласно блоку управления с Фиг. 3, описанному выше.
На Этапе S130 блок 7 управления бесступенчато регулируемой трансмиссией заканчивает процесс, на этот раз без обновления скорости V0 транспортного средства в начале ускорения.
Фиг. 5 представляет собой график, на котором показаны эффекты при выполнении программы управления с Фиг. 4. Горизонтальная ось представляет собой скорость VSP транспортного средства, верхняя часть показывает изменение нажатия APO педали акселератора, и нижняя часть показывает линии переключения. Пунктирными линиями на Фиг. 5 показаны линии переключения в нормальном режиме. Сплошная линия R1 на Фиг. 5 является линией переключения для нажатия А1 педали акселератора, когда скорость V1 транспортного средства задана как скорость V0 транспортного средства в начале ускорения. Таким же образом сплошная линия R2 является линией переключения для нажатия А2 педали акселератора, когда скорость V2 транспортного средства задана как скорость V0 транспортного средства в начале ускорения. Таким же образом штрихпунктирная линия R3 является линией переключения для нажатия А2 педали акселератора, когда скорость V1 транспортного средства задана как скорость V0 транспортного средства в начале ускорения. К тому же D1-D4 показывают рабочие точки, определенные из скорости транспортного средства и скорости вращения входного вала.
На Фиг. 5 ускорение начинается посредством нажатия педали акселератора от нажатия A0 педали акселератора до нажатия А1 педали акселератора при скорости V1 транспортного средства и затем продолжается до скорости V2 транспортного средства с нажатием педали акселератора, удерживаемым у A1. В этом случае скорость V1 транспортного средства задана как скорость V0 транспортного средства в начале ускорения у точки скорости V1 транспортного средства, и скорость вращения при понижении передачи и линия R1 переключения задаются на основании этого. В частности, блок 7 управления бесступенчато регулируемой трансмиссией задает рабочую точку во время начала ускорения как D1 и управляет передаточным числом согласно линии R1 переключения до D2.
При скорости V2 транспортного средства педаль акселератора нажимается до достижения нажатия А2 педали акселератора для повторного ускорения. В этом случае скорость V0 транспортного средства в начале ускорения обновляется до скорости V2 транспортного средства, и скорость вращения при понижении передачи и линия R2 переключения, основанная на скорости V2 транспортного средства, образуются заново. В результате этого блок 7 управления бесступенчато регулируемой трансмиссией сдвигает рабочую точку от D2 к D3 согласно изменению нажатия APO педали акселератора при скорости V2 транспортного средства и управляет передаточным числом согласно линии R2 переключения от D3 и далее. В частности, согласно этой программе управления рабочая точка изменяется, как показано стрелкой на Фиг. 5.
В отличие от этого, если скорость V0 транспортного средства в начале ускорения не обновляется во время повторного ускорения, линия переключения также не обновляется. Соответственно рабочая точка сдвигается от D2 до D4 во время повторного ускорения при скорости V2 транспортного средства. В частности, увеличение скорости вращения входного вала, связанное с повторным ускорением, больше по сравнению со случаем, в котором эта программа управления выполняется, и может возникнуть ощущение резиновой ленты.
Как только что было описано, в настоящем варианте осуществления скорость V0 транспортного средства в начале ускорения обновляется в случае определения намерения совершить повторное ускорение. Таким образом, избыточное увеличение целевой входной скорости DsrREV вращения CVT во время повторного ускорения может быть предотвращено, в результате чего может быть предотвращено возникновение ощущения резиновой ленты во время повторного ускорения.
К тому же, поскольку намерение совершить повторное ускорение определяется на основании нажатия педали акселератора и скорости нажатия педали акселератора, намерение водителя может быть определено адекватно.
Второй вариант осуществления изобретения
Второй вариант осуществления подобен первому варианту осуществления в отношении конфигурации транспортного средства, к которому применяется настоящее изобретение. К тому же управление передаточным числом, выполняемое блоком 7 управления бесступенчато регулируемой трансмиссией, также в основном подобно. Тем не менее существует разница в способе образования линии переключения, когда осуществляется запрос на повторное ускорение во время выполнения линейного режима.
Фиг. 6 представляет собой график, на котором показан способ образования линии переключения настоящего варианта осуществления. Как и на Фиг. 5, горизонтальная ось представляет собой Скорость VSP транспортного средства, верхняя часть показывает изменение нажатия APO педали акселератора, и нижняя часть показывает линии переключения. Пунктирные линии на Фиг. 6 показывают линии переключения в нормальном режиме. Сплошная линия R1 на Фиг. 6 является линией переключения для нажатия А1 педали акселератора, когда скорость V1 транспортного средства задана как скорость V0 транспортного средства в начале ускорения. Таким же образом сплошная линия R2 является линией переключения для нажатия А2 педали акселератора, когда скорость V2 транспортного средства задана как скорость V0 транспортного средства в начале ускорения. Таким же образом штрихпунктирная линия R4 является линией переключения, когда целевая входная скорость DsrREV вращения CVT сохраняется у величины DWNmin нижнего предела.
Второй вариант осуществления подобен первому варианту осуществления тем, что переход к линейному режиму выполняется при скорости V1 транспортного средства, управление передаточным числом выполняется согласно линии переключения R1, определяется повторное ускорение при скорости V2 транспортного средства, скорость V0 транспортного средства в начале ускорения обновляется до скорости V2 транспортного средства, и линия R2 переключения образуется на основании обновленной скорости транспортного средства в начале ускорения.
Тем не менее, если выполняется переход от линии R1 переключения к линии R2 переключения согласно обновлению скорости транспортного средства в начале ускорения, рабочая точка сдвигается от D2 к D3, и целевая входная скорость DsrREV вращения CVT уменьшается. Такое уменьшение целевой входной скорости DsrREV вращения CVT во время ускорения дает водителю ощущение несоответствия.
Соответственно предусмотрена величина DWNmin нижнего предела для целевой входной скорости DsrREV вращения CVT после обновления скорости транспортного средства в начале ускорения, чтобы целевая входная скорость DsrREV вращения CVT не уменьшалась, когда выполняется переход к линейному режиму. В качестве величины DWNmin нижнего предела используется, например, целевая входная скорость DsrREV вращения CVT на 80 мсек раньше от обновления скорости транспортного средства в начале ускорения (далее в этом документе называемая просто "целевой входной скоростью DsrREV вращения CVT на 80 мсек раньше"). В частности, первый член Уравнения (1) с Фиг. 3 становится таким, как показано в последующем Уравнении (3).
Следует заметить, что целевая входная скорость DsrREV вращения CVT на 80 мсек раньше является только примером скорости транспортного средства перед обновлением скорости транспортного средства в начале ускорения, и может быть использована другая величина.
Предполагается, что линия R4 переключения, имеющая характеристику изменения передаточного числа, подобную линии R2 переключения, образуется из рабочей точки D2, определенной, как описано выше в качестве начальной точки, и управление передаточным числом выполняется согласно этой линии R4 переключения. К тому же величина DWNmin нижнего предела сохраняется.
Посредством предусмотрения величины DWNmin нижнего предела, как описано выше, можно избежать возникновения у водителя ощущения несоответствия, заключающегося в том, что входная скорость вращения бесступенчато регулируемой трансмиссии 3 уменьшается, несмотря на происходящее ускорение.
Затем описано управление в случае возврата педали акселератора после повторного ускорения во время выполнения линейного режима (далее в этом документе, называемого операцией возврата нажатия педали акселератора). Блок 7 управления бесступенчато регулируемой трансмиссией продолжает уменьшать величину DWNmin нижнего предела во время операции возврата нажатия педали акселератора, когда операция возврата нажатия педали акселератора осуществляется после повторного ускорения во время выполнения линейного режима. То есть величина DWNmin нижнего предела продолжает обновляться до меньшей величины во время операции возврата нажатия педали акселератора.
Фиг. 7 представляет собой временную диаграмму в случае операции возврата нажатия педали акселератора после повторного ускорения во время выполнения линейного режима. Сплошные линии на Фиг. 7 показывают случай, в котором величина DWNmin нижнего предела обновляется во время операции возврата, и пунктирные линии показывают случай, в котором она не обновляется.
Блок 7 управления бесступенчато регулируемой трансмиссией вычисляет целевую входную скорость DsrREV вращения CVT, в это же время ограничивая величину DWNmin нижнего предела упомянутыми выше Уравнениями (1), (3) во время выполнения линейного режима. Соответственно, когда педаль акселератора нажимается для начала ускорения во время t0, вычисляется начальная скорость LNRdwnREV0 вращения при понижении передачи. Поскольку эта начальная скорость LNRdwnREV0 вращения при понижении передачи ниже, чем величина DWNmin нижнего предела, величина DWNmin нижнего предела используется в качестве скорости вращения при понижении передачи.
Поскольку нажатие педали акселератора удерживается постоянным до времени t1, целевая входная скорость DsrREV вращения CVT увеличивается с постоянным градиентом.
Когда операция возврата нажатия педали акселератора осуществляется во время t1, начальная скорость LNRdwnREV0 вращения при понижении передачи уменьшается, как видно на карте 30 скорости вращения при понижении передачи с Фиг. 3. К тому же градиент во время линейного режима также становится меньше, как видно на карте 31 скорости вращения при повышении передачи с Фиг. 3 и из Уравнения (1).
В это время, поскольку начальная скорость LNRdwnREV0 вращения при понижении передачи меньше, чем величина DWNmin нижнего предела, величина DWNmin нижнего предела используется в качестве скорости вращения при понижении передачи. Соответственно, пока величина DWNmin нижнего предела не будет обновлена, целевая входная скорость DsrREV вращения CVT увеличивается, как показано пунктирной линией на Фиг. 7, несмотря на факт того, что педаль акселератора была возвращена во время t1. В отличие от этого, если величина DWNmin нижнего предела постепенно обновляется до меньшей величины, увеличение целевой входной скорости DsrREV вращения CVT останавливается в ответ на операцию возврата нажатия педали акселератора.
Величина DWNmin нижнего предела может обновляться так, чтобы по меньшей мере постепенно становиться меньшей величиной. Причиной этого является то, что увеличение целевой входной скорости DsrREV вращения CVT останавливается, если величина DWNmin нижнего предела уменьшается.
Более предпочтительным является уменьшение величины DWNmin нижнего предела таким образом, чтобы сохранять разность между величиной DWNmin нижнего предела и начальной скоростью LNRdwREV0 вращения при понижении передачи в начале операции возврата нажатия педали акселератора. Причиной этого является то, что величина DWNmin нижнего предела уменьшается с таким же градиентом, как начальная скорость LNRdwnREV0 вращения при понижении передачи, которая изменяется в ответ на осуществление водителем операции с педалью акселератора, в результате чего целевая входная скорость DsrREV вращения CVT изменяется более в соответствии с намерением водителя.
Как было только что описано, в настоящем варианте осуществления величина DWNmin нижнего предела задана для целевой входной скорости DsrREV вращения CVT после обновления скорости транспортного средства в начале ускорения, и управление передаточным числом выполняется таким образом, чтобы целевая входная скорость DsrREV вращения CVT не становилась ниже этой величины. Посредством этого можно избежать возникновения у водителя ощущения несоответствия, заключающегося в том, что скорость вращения входного вала уменьшается, несмотря на продолжающееся ускорение.
К тому же, поскольку величина DWNmin нижнего предела обновляется до меньшей величины во время операции возврата нажатой педали акселератора, может быть исключена ситуация, в которой увеличение целевой входной скорости DsrREV вращения CVT не может быть остановлено, несмотря на выполнение операции возврата.
Несмотря на то, что выше были описаны варианты осуществления настоящего изобретения, приведенные выше варианты осуществления являются только иллюстрацией некоторых примеров применения настоящего изобретения и не направлены на ограничения технического объема настоящего изобретения конкретными конфигурациями приведенных выше вариантов осуществления.
Устройство содержит датчик скорости транспортного средства, датчик положения педали акселератора для определения рабочего состояния, блок управления для управления передаточным числом бесступенчато регулируемой трансмиссии на основании рабочего состояния, средство определения запроса на ускорение для определения присутствия или отсутствия запроса на ускорение от водителя на основании нажатия педали акселератора и средство задания передаточного числа для задания уменьшения коэффициента уменьшения скорости, управляемого управляющим средством, с увеличением скорости транспортного средства в начале ускорения, если нажатие педали акселератора является одинаковым во время ускорения. Управляющее средство обновляет скорость транспортного средства в начале ускорения до скорости транспортного средства во время определения после определения того, что нажатие педали акселератора было увеличено во время ускорения. Достигается предотвращение возникновения ощущения резиновой ленты в случае дальнейшего увеличения нажатия педали акселератора во время ускорения. 2 н. и 2 з.п. ф-лы, 7 ил.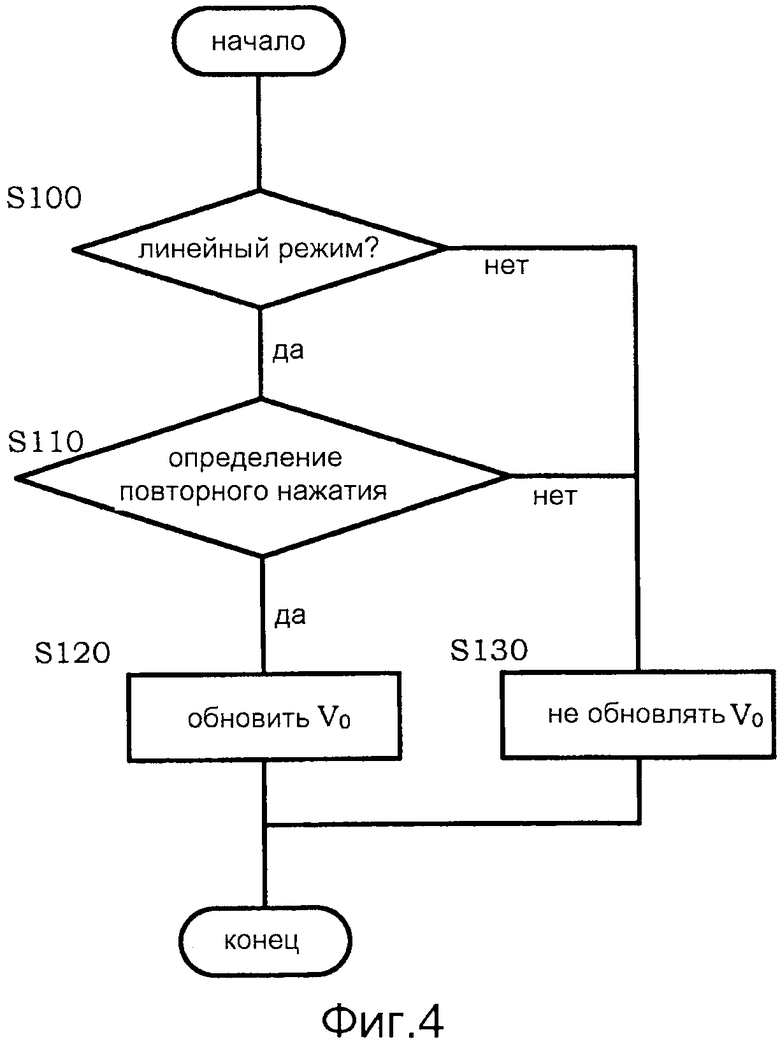
1. Управляющее устройство для бесступенчато регулируемой трансмиссии, содержащее:
средства определения рабочего состояния для определения рабочего состояния транспортного средства, включающего в себя скорость транспортного средства и нажатие педали акселератора;
управляющие средства для управления передаточным числом бесступенчато регулируемой трансмиссии на основании рабочего состояния;
средства определения запроса на ускорение для определения присутствия или отсутствия запроса на ускорение от водителя на основании нажатия педали акселератора; и
средства задания передаточного числа для установки коэффициента уменьшения скорости, управляемого управляющими средствами, меньшим с увеличением скорости транспортного средства в начале ускорения, если нажатие педали акселератора является одинаковым во время ускорения;
причем управляющее средство обновляет скорость транспортного средства в начале ускорения до скорости транспортного средства во время определения после определения того, что нажатие педали акселератора было увеличено во время ускорения, и задает скорость вращения входного вала бесступенчато регулируемой трансмиссии на основании характеристики трансмиссии перед обновлением скорости транспортного средства в начале ускорения как нижнюю предельную величину скорости вращения входного вала бесступенчато регулируемой трансмиссии после обновления, если
скорость вращения входного вала бесступенчато регулируемой трансмиссии, основанная на характеристике трансмиссии после обновления, ниже, чем скорость вращения входного вала бесступенчато регулируемой трансмиссии, основанная на характеристике трансмиссии перед обновлением.
2. Устройство по п. 1, в котором управляющее средство определяет, что нажатие педали акселератора было увеличено, когда нажатие педали акселератора больше, чем пороговая величина нажатия педали акселератора, и скорость изменения нажатия педали акселератора выше, чем пороговая величина скорости изменения.
3. Устройство по п. 1, в котором управляющее средство уменьшает нижнюю предельную величину скорости вращения входного вала бесступенчато регулируемой трансмиссии во время операции возврата нажатия педали акселератора при определении начала операции возврата нажатия педали акселератора после увеличения нажатия педали акселератора.
4. Способ управления бесступенчато регулируемой трансмиссией, при котором:
определяют рабочее состояние транспортного средства, включающее в себя скорость транспортного средства и нажатие педали акселератора;
управляют передаточным числом бесступенчато регулируемой трансмиссии на основании рабочего состояния;
определяют наличие или отсутствие запроса водителя на ускорение на основании нажатия педали акселератора;
устанавливают коэффициент уменьшения скорости меньшим с увеличением скорости транспортного средства в начале ускорения,
если нажатие педали акселератора является одинаковым во время ускорения; и
обновляют скорость транспортного средства в начале ускорения до скорости транспортного средства во время определения после определения того, что нажатие педали акселератора было увеличено во время ускорения, и задают скорость вращения входного вала бесступенчато регулируемой трансмиссии на основании характеристики трансмиссии перед обновлением скорости транспортного средства в начале ускорения как нижнюю предельную величину скорости вращения входного вала бесступенчато регулируемой трансмиссии после обновления, если скорость вращения входного вала бесступенчато регулируемой трансмиссии, основанная на характеристике трансмиссии после обновления, ниже, чем скорость вращения входного вала бесступенчато регулируемой трансмиссии, основанная на характеристике трансмиссии перед обновлением.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

