Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству управления переключением передаточных отношений для бесступенчатой трансмиссии.
Уровень техники
В качестве управления передаточным числом для бесступенчатой трансмиссии режим управления (в дальнейшем называемый "нормальным режимом"), который, по существу, управляет передаточным числом на переменной основе в соответствии с рабочими условиями, и который, когда потребность водителя в ускорении является значительной, выполняет переход в режим управления (в дальнейшем называемый "линейным режимом"), чтобы предоставлять такое передаточное число, при котором частота вращения входного вала бесступенчатой трансмиссии становится высокой по сравнению с нормальным режимом при идентичной скорости транспортного средства. Другими словами, линейный режим является режимом для того чтобы сдерживать изменение передаточного числа по сравнению с нормальным режимом.
Например, согласно JP 2002-372143A, когда открытие акселератора превышает пороговое значение, определяется то, что потребность в ускорении является значительной, и выполняется переход в линейный режим для того, чтобы сдерживать изменение передаточного числа. Посредством этого, когда частота вращения двигателя увеличивается вследствие увеличения открытия дросселя, движущая сила также быстро увеличивается. Другими словами, задержка во времени после того как открытие дросселя увеличилось и до тех пор пока ощущение ускорения не будет получено, становится короткой, так что можно облегчать неприятное ощущение, которое возникает у водителя.
Затем когда открытие акселератора снижается на предварительно определенную величину в ходе приведения в движение в линейном режиме, определяется то, что потребность в ускорении уменьшена, линейный режим отменяется и выполняется переход в нормальный режим.
Сущность изобретения
Тем не менее, при условии, что в соответствии с управлением согласно JP 2002-372143A степень потребности в ускорении определяется на основе открытия акселератора, могут возникать случаи, в которых невозможно считывать снижение потребности водителя в ускорении в ходе приведения в движение в линейном режиме. Например, когда величина изменения открытия акселератора является малой и его скорость изменения также является небольшой, например при попытке выполнять прозрачный переход к приведению в движение в нормальном режиме после запуска и ускорения, невозможно считывать снижение потребности в ускорении. В этом случае хотя выполняется приведение в движение в нормальном режиме, линейный режим не отменяется и, следовательно, двигатель внутреннего сгорания поддерживает высокоскоростное вращение и вызывает у водителя неприятное ощущение. Кроме того, частота вращения двигателя, которая поддерживается высокой, может приводить к ухудшенным показателям пробега.
Следовательно, задачей настоящего изобретения является создание устройства управления переключением передаточных отношений бесступенчатой трансмиссии, посредством которого, когда ускорение прекращается и выполняется переход к приведению в движение в нормальном режиме, можно надежно считывать то, что водитель больше не предполагает ускоряться и выполнять переход в нормальный режим.
Для решения указанной задачи согласно настоящему изобретению применяется средство определения рабочих условий, которое определяет рабочие условия транспортного средства, включающие в себя скорость транспортного средства и открытие акселератора, средство управления, которое управляет передаточным числом бесступенчатой трансмиссии на основе рабочих условий, средство идентификации необходимости ускорения, которое идентифицирует то, требуется или нет ускорение водителем, и средство задания линейного режима, которое на основе потребности в ускорении водителем задает линейный режим, который предоставляет такое передаточное число, при котором частота вращения входного вала бесступенчатой трансмиссии становится высокой по сравнению с нормальным режимом при идентичной скорости транспортного средства. Кроме того, характеристика настоящего изобретения заключается в том, чтобы иметь средство определения G передних/задних колес, которое определяет G передних/задних колес транспортного средства, и средство отмены линейного режима, которое, когда идентифицируется то, что ускорение не требуется, на основе G передних/задних колес в ходе приведения в движение в линейном режиме отменяет линейный режим даже в условиях работы в линейном режиме.
Подробности этого изобретения, как и другие характеристики и преимущества, поясняются в нижеприведенном описании, а также показаны на прилагаемых чертежах.
Краткое описание чертежей
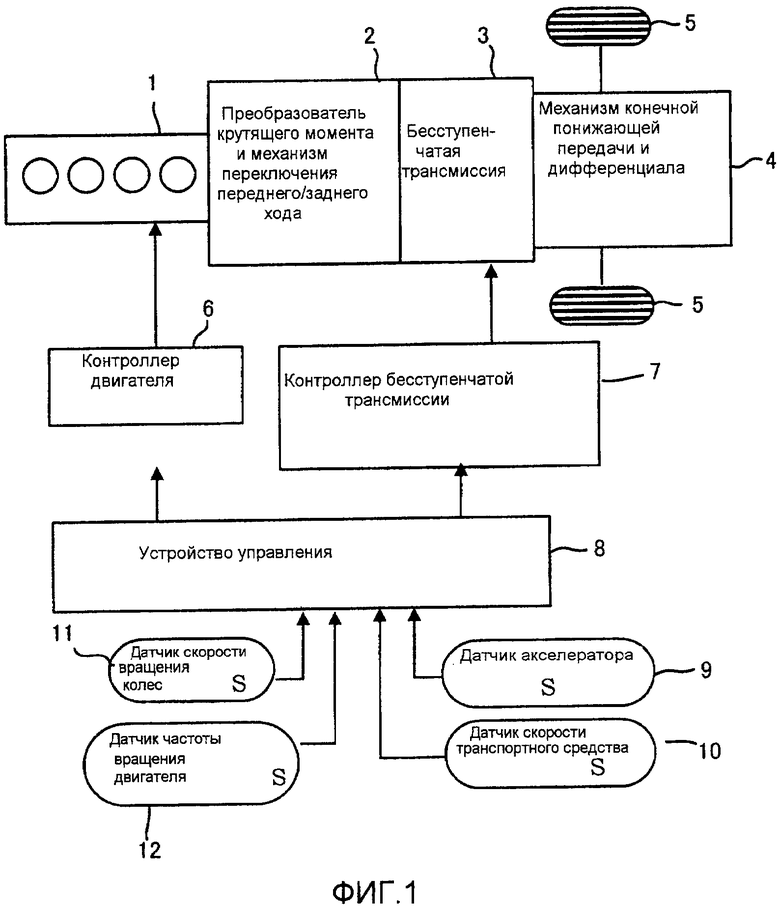
Фиг.1 является схемой принципиальной конфигурации, показывающей вариант осуществления транспортного средства, на котором монтируется устройство управления переключением передаточных отношений согласно настоящему изобретению;
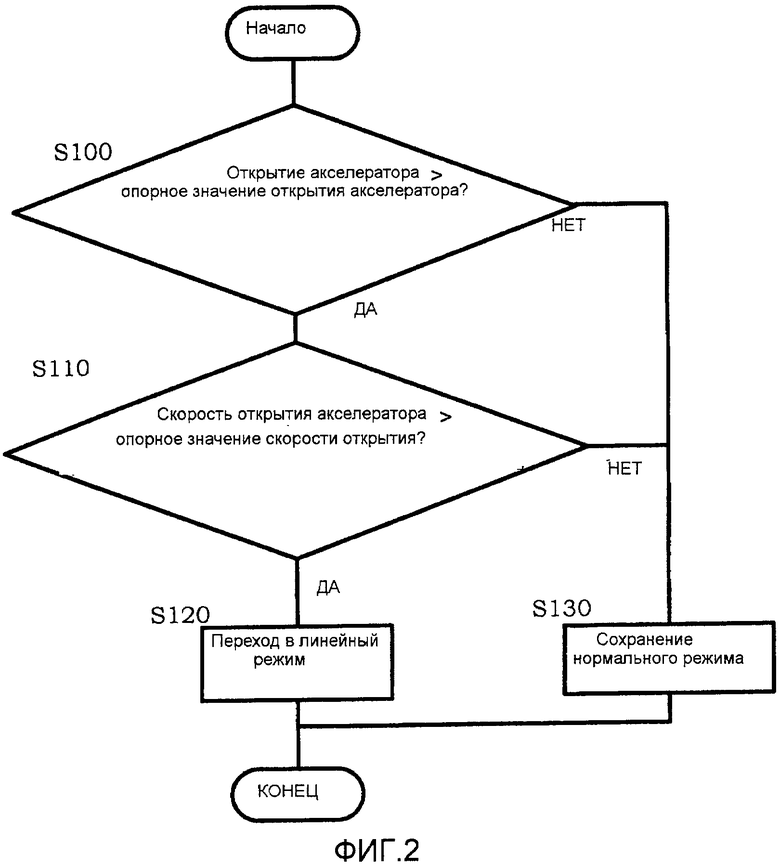
Фиг.2 является блок-схемой последовательности операций способа, показывающей управляющую процедуру для перехода из нормального режима в линейный режим, выполняемую посредством контроллера бесступенчатой трансмиссии;
Фиг.3 является блок-схемой последовательности операций способа, показывающей управляющую процедуру для перехода из линейного режима в нормальный режим, выполняемую посредством контроллера бесступенчатой трансмиссии;
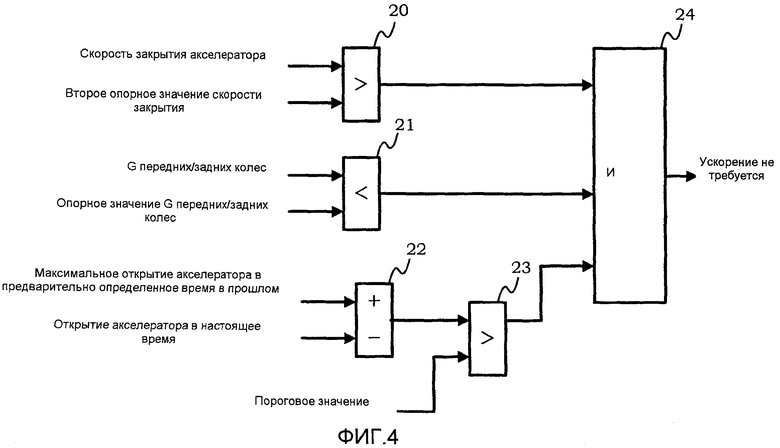
Фиг.4 является блок-схемой управления для идентификации потребности в ускорении, которая выполняется посредством контроллера бесступенчатой трансмиссии в ходе линейного режима;
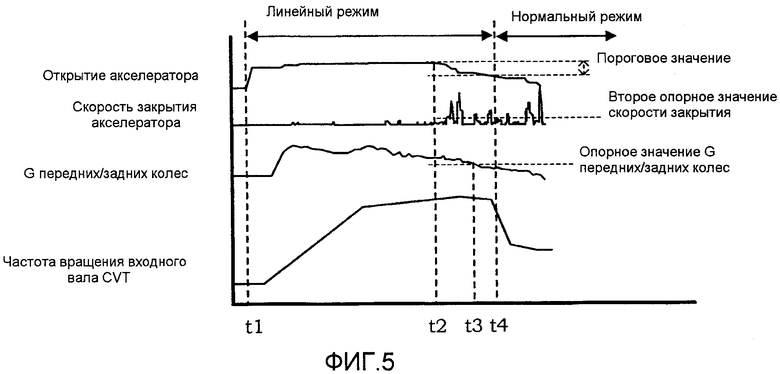
Фиг.5 является временной диаграммой, когда выполняется управляющая процедура по фиг.3; и
Фиг.6 является схемой, показывающей области, в которых линейный режим отменяется согласно настоящему варианту осуществления.
Подробное описание вариантов осуществления изобретения
Фиг.1 показывает схематичную конфигурацию транспортного средства, на котором монтируется устройство управления переключением передаточных отношений согласно настоящему изобретению. Движущая сила двигателя 1 внутреннего сгорания передается на ведущие колеса 5 через преобразователь крутящего момента и механизм 2 переключения переднего/заднего хода, бесступенчатую трансмиссию 3 и механизм 4 конечной понижающей передачи и дифференциала.
В двигателе 1 внутреннего сгорания управление объемом впрыска топлива, управление распределением зажигания и т.д. выполняется посредством контроллера 6 двигателя.
В бесступенчатой трансмиссии 3 передаточное число управляется посредством контроллера 7 бесступенчатой трансмиссии непрерывным способом.
Устройство 8 управления формируется с вышеуказанными контроллерами 6 и 7, а также с микрокомпьютером и его периферийными устройствами и, в общем, управляет транспортным средством. С этим устройством 8 управления соединяются датчик 9 акселератора, который определяет открытие акселератора (рабочую величину нажатия педали акселератора), датчик 10 скорости транспортного средства, который определяет скорость движения транспортного средства, датчик 11 скорости вращения колес для определения скорости вращения колес для ведущих колес 5, датчик 12 частоты вращения двигателя, который определяет частоту вращения двигателя 1 внутреннего сгорания, и т.д. Контроллер 7 бесступенчатой трансмиссии соответствует средству управления по настоящему изобретению, а датчик 9 акселератора и датчик 10 скорости транспортного средства соответствуют средству определения рабочих условий по настоящему изобретению.
Следует отметить, что в нижеприведенном описании ременная CVT посредством механизма раздвижного шкива предполагается в качестве бесступенчатой трансмиссии 3, и передаточное число может упоминаться под термином "передаточное отношение шкивов". Передаточное отношение шкивов или передаточное число являются синонимичными с передаточным отношением, т.е. его значение представляет собой "частоту вращения шкива входного вала/частоту вращения шкива выходного вала".
Фиг.2 показывает из действий по управлению переключением передаточных отношений, выполняемых посредством контроллера 7 бесступенчатой трансмиссии, управляющую процедуру, чтобы определять то, выполнять или нет переход из нормального режима в линейный режим. Фиг.3 показывает из действий по управлению переключением передаточных отношений, выполняемых посредством контроллера 7 бесступенчатой трансмиссии, управляющую процедуру, чтобы определять то, выполнять или нет переход из линейного режима в нормальный режим. Любая управляющая процедура выполняется и повторяется в коротком цикле, например, приблизительно в 10 миллисекунд.
Управляющая процедура по фиг.2 показывает пример управляющей процедуры, чтобы определять то, необходимо или нет выполнять переход из нормального режима в линейный режим. Следует отметить, что содержимое этой управляющей процедуры является общедоступным.
На этапе S100 контроллер 7 бесступенчатой трансмиссии определяет то, превышает или нет открытие акселератора, которое определяется в датчике 9 акселератора, опорное значение открытия акселератора, которое задается заранее в качестве порогового значения для идентификации ускорения. Когда открытие акселератора превышает опорное значение открытия акселератора, выполняется процесс этапа S110, а когда открытие акселератора меньше опорного значения открытия акселератора, на этапе S130 определяется то, что нормальный режим сохраняется, и процесс в это время заканчивается.
На этапе S110 контроллер 7 бесступенчатой трансмиссии определяет то, превышает или нет скорость открытия акселератора, которая вычисляется на основе значения определения датчика 9 акселератора, опорное значение скорости раскрытия, которое задается заранее в качестве порогового значения для идентификации ускорения. Когда скорость открытия акселератора превышает опорное значение скорости раскрытия, выполняется процесс этапа S120, а когда скорость открытия акселератора ниже опорного значения скорости раскрытия, на этапе S130 определяется то, что нормальный режим сохраняется, и процесс в это время заканчивается.
На этапе S120 контроллер 7 бесступенчатой трансмиссии определяет переход в линейный режим.
В нормальном режиме или в линейном режиме передаточное число задается в соответствии с характеристической картой трансмиссии для каждого режима, в которой взаимосвязь между частотой вращения входного вала бесступенчатой трансмиссии 3 и скоростью транспортного средства задается на основе открытия акселератора. Тем не менее, в случае линейного режима, изменение передаточного числа демонстрирует умеренные характеристики трансмиссии по сравнению с нормальным режимом. Другими словами, по сравнению с идентичным открытием акселератора и идентичной скоростью транспортного средства частота входного вала бесступенчатой трансмиссии 3 является более высокой в линейном режиме, чем в нормальном режиме.
Когда переход в линейный режим выполняется согласно управляющей процедуре по фиг.2, передаточное число управляется в соответствии с характеристической картой трансмиссии для линейного режима, а также определяется то, отменять или нет линейный режим согласно управляющей процедуре по фиг.3.
На этапе S200 контроллер 7 бесступенчатой трансмиссии определяет то, превышает или нет открытие акселератора опорное значение открытия акселератора в качестве порогового значения. Когда открытие акселератора превышает опорное значение открытия акселератора, выполняется процесс этапа S210, а когда открытие акселератора меньше опорного значения открытия акселератора, переход в нормальный режим определяется на этапе S250, и эта управляющая процедура заканчивается. Опорное значение открытия акселератора задается равным сравнительно небольшому открытию, аналогично пороговому значению при определении отмены линейного режима в общедоступном устройстве управления переключением передаточных отношений, и задается равным, например, приблизительно 1/8.
На этапе S210 контроллер 7 бесступенчатой трансмиссии определяет то, ниже или нет скорость закрытия акселератора, которая вычисляется на основе значения определения датчика 9 акселератора, первого опорного значения скорости закрытия, которое задается заранее. Первое опорное значение скорости закрытия задается равным сравнительно высокой скорости, аналогично пороговому значению при определении отмены линейного режима в общедоступном устройстве управления переключением передаточных отношений, и задается равным, например, приблизительно 100 градусов/сек. Когда скорость закрытия акселератора ниже первого опорного значения скорости закрытия, выполняется процесс этапа S220, а когда скорость закрытия акселератора превышает первое опорное значение скорости закрытия, переход в нормальный режим определяется на этапе S250, и эта управляющая процедура заканчивается.
В качестве процедуры, чтобы определять подавление линейного режима, этап S200 и этап S210, описанные выше, являются общедоступными.
На этапе S220 контроллер 7 бесступенчатой трансмиссии выполняет идентификацию потребности в ускорении, описанную ниже.
Фиг.4 является блок-схемой, показывающей содержимое операций идентификации потребности в ускорении, выполняемой в момент, когда контроллер 7 бесступенчатой трансмиссии находится в линейном режиме. Эта блок-схема показывает содержимое операций схематично и не представляет физическую конфигурацию.
В модуле 20 принятия решений определяется то, превышает или нет скорость закрытия акселератора второе опорное значение скорости закрытия, и когда да, результат вводится в модуль 24 принятия решений. Второе опорное значение скорости закрытия предназначено только для считывания того, отпускает или нет водитель педаль акселератора преднамеренно, так что его значение задается максимально небольшим в пределах диапазона, и ошибки при принятии решения могут исключаться. Например, значение задается равным приблизительно 20 градусов/сек.
В модуле 21 принятия решений определяется то, меньше или нет G передних/задних колес опорного значения G, и когда да, результат вводится в модуль 24 принятия решений. Опорное значение G задается следующим образом. Например, даже когда открытие акселератора является постоянным, хотя степень ускорения снижается после увеличения скорости, это снижение степени ускорения становится более очевидным из низкой скорости транспортного средства, когда выходная мощность двигателя 1 внутреннего сгорания ниже или когда вес транспортного средства больше. То же применимо, когда окружение движения изменяется с ровной дороги на дорогу, идущую в подъем. Между тем, когда выходная мощность двигателя 1 внутреннего сгорания становится выше или когда вес транспортного средства меньше, влияние увеличения скорости транспортного средства и градиента поверхности дороги на степень ускорения становится меньше. Таким образом, опорное значение G задается надлежащим образом в соответствии со спецификациями двигателя 1 внутреннего сгорания и транспортного средства и т.д.
G передних/задних колес вычисляется из скорости вращения колес и частоты вращения выходного вала бесступенчатой трансмиссии 3. Частота вращения выходного вала бесступенчатой трансмиссии 3 определяется в датчике частоты вращения выходного вала, который не иллюстрируется.
Хотя можно определять G передних/задних колес непосредственно с использованием G-датчика, значения определения G-датчика могут показывать влияние градиента поверхности дороги. Следовательно, когда, например, ровная дорога изменяется на дорогу, идущую в подъем и т.д., могут возникать случаи, в которых G передних/задних колес становится меньше опорного значения G, даже если водитель предполагает ускоряться. Таким образом, для того чтобы исключать влияние изменения окружения движения, G передних/задних колес вычисляется на основе скорости вращения колес для ведущих колес 5 или частоты вращения выходного вала бесступенчатой трансмиссии 3.
В модуле 22 вычитания текущее открытие акселератора вычитается из максимального открытия акселератора от предварительно определенного времени в прошлом до настоящего времени, и результат вводится в модуль 23 принятия решений. Хотя в равной степени можно использовать максимальное открытие акселератора после перехода в линейный режим вплоть до настоящего времени, значение от предварительно определенного времени в прошлом используется для того, чтобы принимать решения на основе более нового состояния. Предварительно определенное время составляет, например, приблизительно 5 секунд. Посредством сравнения текущего открытия акселератора с максимальным значением в предварительно определенное время вместо самого последнего значения можно более точно считывать то, предполагается или нет ускорение.
В модуле 23 принятия решений определяется то, превышает или нет результат работы модуля 22 вычитания пороговое значение, которое задается заранее, и когда да, результат вводится в модуль 24 принятия решений. Для порогового значения задается значение, которое позволяет исключать операции нажатия педали акселератора, которые водитель выполняет непреднамеренно, или случаи, в которых ускорение предполагается, и при этом, тем не менее, педаль акселератора немного отпускается для регулирования скорости и т.д.
Когда все результаты определения модулей 20-23 принятия решений вводятся, модуль 24 принятия решений определяет то, что нет потребности в ускорении. После этого выполняется возврат к блок-схеме последовательности операций способа по фиг.3.
На этапе S230 контроллер 7 бесступенчатой трансмиссии определяет то, существует или нет потребность в ускорении, на основе результата определения этапа S220. Когда существует потребность в ускорении, на этапе S240 определяется то, что линейный режим сохраняется, и процесс в это время заканчивается. С другой стороны, когда нет потребности в ускорении, переход в нормальный режим определяется на этапе S250, и эта управляющая процедура заканчивается.
Фиг.5 является временной диаграммой, когда выполняется эта управляющая процедура.
После того как переход в линейный режим выполняется во время t1, открытие акселератора начинает снижаться во время t2. После времени t2 и перед временем t3, хотя несколько раз возникает то, что скорость закрытия акселератора становится больше второго опорного значения скорости закрытия, каждый раз сохраняется линейный режим, поскольку открытие акселератора не удовлетворяет условию. Хотя G передних/задних колес становится ниже опорного значения G передних/задних колес во время t3, так же открытие акселератора не удовлетворяет условию и, следовательно, линейный режим сохраняется. Во время t4 все три условия - открытие акселератора, скорость закрытия акселератора и G передних/задних колес - удовлетворяются, и переход в нормальный режим выполняется. Затем посредством перехода в нормальный режим частота входного вала бесступенчатой трансмиссии 3 снижается.
Как описано выше, G передних/задних колес транспортного средства используется в качестве значения для принятия решения для отмены линейного режима и определения перехода в нормальный режим, так что можно принимать решения в соответствии с изменением степени ускорения транспортного средства. Затем также посредством использования скорости закрытия акселератора в качестве вышеуказанного значения для принятия решения можно исключать ошибки при принятии решения, когда предполагается ускорение, и, тем не менее, G передних/задних колес снижается, к примеру, при переходе на дорогу, идущую в подъем. Кроме того, также посредством использования величины отпускания из максимального открытия акселератора в ходе линейного режима в качестве вышеуказанного значения для принятия решения можно не допускать отмену линейного режима, когда величина отпускания является очень несущественной и не превышает пороговое значение, к примеру, когда водитель выполняет операции нажатия педали акселератора непреднамеренно.
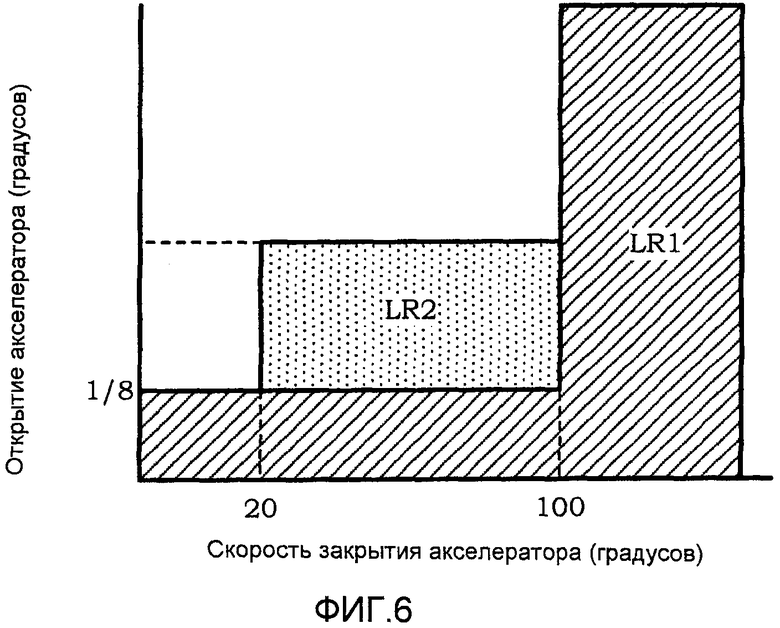
Фиг.6 является схемой, показывающей области, в которых линейный режим отменяется согласно управляющей процедуре по фиг.3. Вертикальная ось представляет собой открытие акселератора, а горизонтальная ось представляет собой скорость закрытия акселератора. Область LR1 и область LR2 являются областями, в которых линейный режим отменяется, когда опорное значение открытия акселератора становится равным 1/8, первое опорное значение скорости закрытия становится равным 100 град/сек, и второе опорное значение скорости закрытия становится равным 20 град/сек. Следует отметить, что каждое опорное значение является просто примером.
Область LR1 также является областью, в которой линейный режим отменяется в процессах этапа S200 и этапа S210, т.е. областью, в которой линейный режим отменяется в предшествующем уровне техники. Более конкретно, она является областью, которая должна применяться, когда открытие акселератора становится очень небольшим открытием или когда открытие акселератора внезапно становится меньшим, к примеру когда нога снимается с педали акселератора.
Область LR2 является областью, в которой появляется возможность отменять линейный режим посредством процессов этапов S220 и S230 этой управляющей процедуры. Более конкретно она является областью, которая должна применяться, когда водитель пытается выполнять переход от приведения в движение в режиме ускорения к приведению в движение в нормальном режиме и отпускает педаль акселератора обратно до низкого/среднего открытия сравнительно умеренно. Следует отметить, что верхнее предельное значение открытия акселератора для области LR2 представляет собой открытие акселератора, которое немного выше открытия акселератора для приведения в движение в нормальном режиме, определенного из кривой нагрузки, и более конкретно определяется из взаимосвязи с опорным значением G передних/задних колес.
В этих областях, когда линейный режим сохраняется, поддерживается состояние, в котором частота вращения двигателя является высокой, что не только вызывает неприятное ощущение у водителя, но и на практике также может приводить к меньшему пробегу. Тем не менее, согласно этой управляющей процедуре также линейный режим может быть отменен в области LR2, так что можно разрешать эти проблемы.
Преимущество вышеописанного настоящего варианта осуществления может обобщаться следующим образом.
То, предполагает или нет водитель ускоряться, определяется на основе G передних/задних колес в ходе приведения в движение в линейном режиме, так что можно надежно считывать переход к приведению в движение в нормальном режиме и отменять линейный режим. В результате этого появляется возможность отменять линейный режим даже в области, в которой невозможно отменять линейный режим согласно решениям только на основе скорости открытия акселератора и закрытия акселератора, к примеру в области LR2 по фиг.6.
Кроме того, то, предполагается или нет ускорение в ходе приведения в движение в линейном режиме, также определяется на основе скорости закрытия акселератора, помимо G передних/задних колес, так что можно исключать ошибки при принятии решения в случае, если ускорение предполагается, и при этом, тем не менее, G передних/задних колес снижается, к примеру, при переходе на дорогу, идущую в подъем, с ровной дороги.
Кроме того, то, предполагается или нет ускорение в ходе приведения в движение в линейном режиме, также определяется на основе величины отпускания из максимального открытия в ходе линейного режима, так что можно не допускать отмену линейного режима, когда величина отпускания педали акселератора является небольшой.
G передних/задних колес вычисляется на основе скорости вращения колес и частоты вращения выходного вала бесступенчатой трансмиссии, так что можно точно считывать, когда ускорение больше не предполагается даже в ходе приведения в движение по дороге, идущей в подъем.
Максимальное открытие акселератора в ходе линейного режима задается максимальным открытием от настоящего времени до предварительно определенного времени в прошлом, так что можно определять то, предполагается или нет ускорение на основе последнего состояния.
Хотя выше описан вариант осуществления настоящего изобретения, вышеописанный вариант осуществления иллюстрирует только часть примера варианта применения настоящего изобретения и не имеет намерение ограничивать объем настоящего изобретения конкретными конфигурациями вышеописанного варианта осуществления.
При управлении трансмиссией определяют рабочие условия транспортного средства, включающие в себя скорость транспортного средства и открытие акселератора. Управляют передаточным числом бесступенчатой трансмиссии на основе рабочих условий. Идентифицируют то, требуется или нет ускорение водителем, и задают линейный режим, который предоставляет такое передаточное число, при котором частота вращения входного вала бесступенчатой трансмиссии становится высокой по сравнению с нормальным режимом при идентичной скорости транспортного средства, когда средство идентификации необходимости ускорения идентифицирует то, что ускорение требуется водителем, на основе открытия педали акселератора и скорости открытия акселератора. Определяют ускорение вперед/назад транспортного средства; и отменяют линейный режим, когда ускорение не требуется, на основе ускорения вперед/назад в ходе приведения в движение в линейном режиме, даже когда открытие педали акселератора и скорость закрытия акселератора удовлетворяют требованиям. Предложено также устройство управления переключением передаточных отношений для бесступенчатой трансмиссии. Достигается надежное считывание того, что водитель больше не предполагает ускоряться при переходе к движению в нормальном режиме из линейного режима. 2 н. и 5 з.п. ф-лы, 6 ил.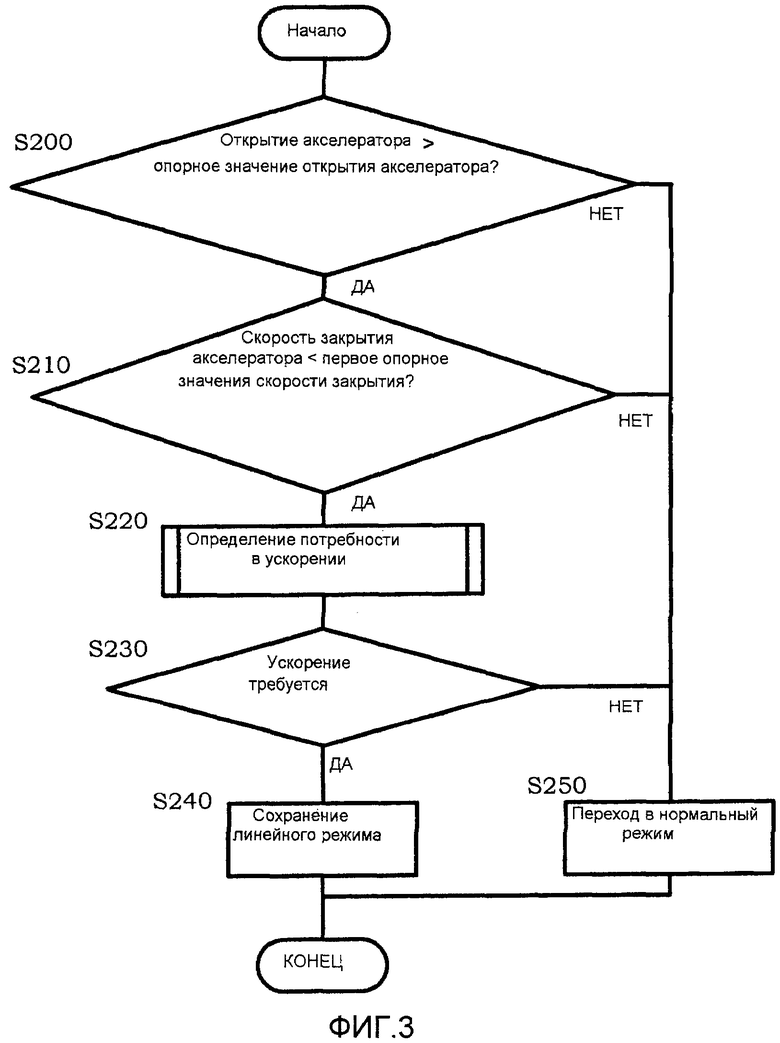
1. Устройство управления переключением передаточных отношений для бесступенчатой трансмиссии, содержащее:
средство определения рабочих условий для определения рабочих условий транспортного средства, включающих в себя скорость транспортного средства и открытие акселератора;
средство управления для управления передаточным числом бесступенчатой трансмиссии на основе рабочих условий;
средство идентификации необходимости ускорения для идентификации того, требуется или нет ускорение водителем; и
средство задания линейного режима для задания линейного режима, который обеспечивает такое передаточное число, при котором частота вращения входного вала бесступенчатой трансмиссии становится высокой по сравнению с нормальным режимом при идентичной скорости транспортного средства, когда средство идентификации необходимости ускорения идентифицирует то, что ускорение требуется водителем, на основе открытия педали акселератора и скорости открытия акселератора, при этом устройство управления переключением передаточных отношений дополнительно содержит:
средство определения ускорения вперед/назад для определения ускорения вперед/назад транспортного средства; и
средство отмены линейного режима для отмены линейного режима, когда средство идентификации необходимости ускорения идентифицирует то, что ускорение не требуется, на основе ускорения вперед/назад в ходе приведения в движение в линейном режиме, даже когда открытие педали акселератора и скорость закрытия акселератора удовлетворяют требованиям.
2. Устройство по п. 1, дополнительно содержащее средство определения скорости закрытия педали акселератора для определения скорости закрытия педали акселератора, при этом средство идентификации необходимости ускорения идентифицирует то, требуется или нет ускорение в ходе приведения в движение в линейном режиме, на основе ускорения вперед/назад и, дополнительно, на основе скорости закрытия педали акселератора.
3. Устройство по п. 2, дополнительно содержащее средство определения открытия акселератора для определения открытия педали акселератора, при этом средство идентификации необходимости ускорения идентифицирует то, требуется или нет ускорение в ходе приведения в движение в линейном режиме, на основе ускорения вперед/назад и скорости закрытия педали акселератора и, дополнительно, на основе величины отпускания акселератора из максимального открытия акселератора в линейном режиме.
4. Устройство по любому из пп. 1-3, в котором средство определения ускорения вперед/назад выполнено с возможностью вычисления ускорения вперед/назад на основе скорости вращения колес или частоты вращения выходного вала бесступенчатой трансмиссии.
5. Устройство по п. 4, в котором максимальное открытие акселератора в линейном режиме задается максимальным открытием от настоящего времени до предварительно определенного времени в прошлом.
6. Устройство по п. 3, в котором максимальное открытие акселератора в линейном режиме задается максимальным открытием от настоящего времени до предварительно определенного времени в прошлом.
7. Способ управления переключением передаточных отношений для бесступенчатой трансмиссии, при котором:
определяют рабочие условия транспортного средства, включающие в себя скорость транспортного средства и открытие акселератора;
управляют передаточным числом бесступенчатой трансмиссии на основе рабочих условий;
идентифицируют то, требуется или нет ускорение водителем; и задают линейный режим, который предоставляет такое передаточное число, при котором частота вращения входного вала бесступенчатой трансмиссии становится высокой по сравнению с нормальным режимом при идентичной скорости транспортного средства, когда средство идентификации необходимости ускорения идентифицирует то, что ускорение требуется водителем, на основе открытия педали акселератора и скорости открытия акселератора, при этом способ дополнительно содержит этапы, на которых:
определяют ускорение вперед/назад транспортного средства; и отменяют линейный режим, когда ускорение не требуется, на основе ускорения вперед/назад в ходе приведения в движение в линейном режиме, даже когда открытие педали акселератора и скорость закрытия акселератора удовлетворяют требованиям.
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

