Область техники
[0001] Настоящее изобретение относится к наземному передатчику навигационного сигнала для передачи навигационного сигнала или сигнала для позиционирования приемника и к способу генерации навигационного сигнала.
Предшествующий уровень техники
[0002] В спутниковой системе позиционирования местоположение приемника определяется пассивным измерением сигналов позиционирования, передаваемых от множества спутников, посредством приемника. В этом случае временная синхронизация является одним из ключевых технических элементов. Бортовой тактовый генератор используется для генерации регулярной, в общем случае последовательной серии событий, называемых «периодом» (циклом), и тактовое время появления периода кодируется кодом случайных чисел или кодом псевдослучайных чисел (далее упоминается как код расширения). Затем, как результат псевдослучайной или случайной функции последовательности кодирования временного периода, определяется спектр выходного сигнала в соответствии со скоростью изменения элемента кода расширения и волновой формы сигнала расширения. Частота покрывает широкий диапазон. В общем случае, волновая форма расширения является прямоугольной и имеет спектр мощности, представленный sinc-функцией.
[0003] Примером такой спутниковой системы позиционирования является глобальная система позиционирования (GPS). GPS обычно работает с использованием множества частотных диапазонов, таких как L1, L2 и L5, каждый из которых имеет, соответственно, частоту 1575,42 МГц, 1227,6 МГц и 1176,45 МГц. Каждый сигнал в этих частотных диапазонах модулирован соответствующим сигналом расширения. Как может быть понятно специалистам в данной области техники, СА (грубое обнаружение) сигнал, излученный спутниковой навигационной системой GPS, передается в диапазоне L1 1575,42 МГц и имеет скорость кода расширения (частоту следования элементарных посылок) 1,023 МГц.
[0004] В отличие от этого, помимо спутниковых систем позиционирования, включая GPS, известная система измерения внутренней установки (IMES) предназначена для определения информации местоположения в среде внутри помещений. IMES сигнал, который подобен сигналу GPS позиционирования, передается в том же частотном диапазоне L1 частоты 1575,42 МГц и имеет скорость кода расширения (частоту следования элементарных посылок) 1,023 МГц, что является тем же семейством (золотой последовательности), что и код расширения СА сигнала.
[0005] IMES передатчики для передачи IMES сигнала, которые устанавливаются в большом количестве в зданиях и подземных торговых центрах, передают информацию о своем местоположении путем наложения ее на IMES сигналы. То есть пользователь, имеющий IMES приемник, способен узнать свое собственное местоположение путем приема и демодуляции IMES сигнала и при этом преобразуя наложенную на них информацию местоположения.
[0006] В этом отношении СА код IMES сигнала является тем же самым, что и СА код GPS сигнала, и повторяет последовательность 1023 битов (1023 элементарных посылок) в цикле 1 мс. Следовательно, чтобы коммутировать сигналы без поиска несущей частоты и фазы кода, требуется, чтобы несущая частота имела отличие от ожидаемого значения, попадающего в интервал 1 кГц, что является обратной величиной кодового цикла в 1 мс, и поэтому надежно обеспечивала точность в пределах ±500 Гц. Поскольку это представляет, что девиация тактовой частоты равна 500 Гц/1575,42 МГц=0,33Е-6, можно считать, что требуется степень точности менее 2Е-6(0,2 частей на миллион) с некоторым запасом. Далее, поскольку фаза кода измеряется как одна микросекунда для длительности в одну элементарную посылку, требуемая степень точности будет около ±300 нс или менее.
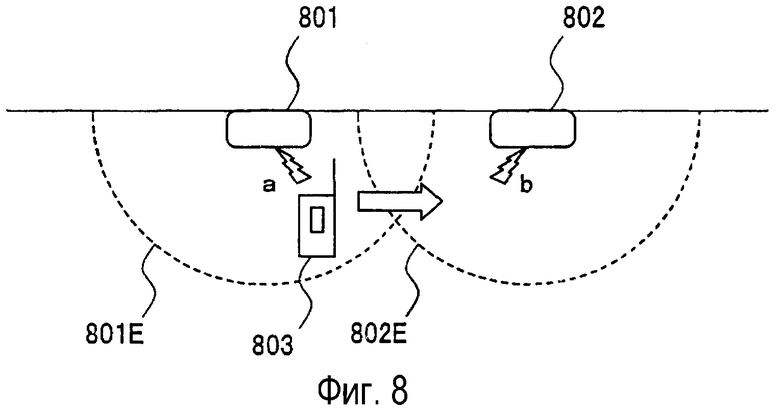
[0007] Фиг. 8 иллюстрирует ситуацию, в которой пользователь, имеющий обычный IMES приемник, перемещается из сигнальной области для обычного передатчика А в сигнальную область для передатчика В. Если пользователь, имеющий IMES приемник 803, перемещается из сигнальной области (801Е) передатчика А (801) в сигнальную область (802Е) передатчика В(802), IMES приемнику требуется переключить принимаемый сигнал с сигнала а, который совместим с передатчиком 801, на сигнал b, совместимый с передатчиком 802. Таким образом, в случае коммутации принимаемого сигнала с сигнала а на сигнал b, в качестве примера, желательно, с точки зрения стабильности связи и удобства для пользователя, чтобы длительность прерывания приема IMES сигналов была по возможности короткой.
[0008] Как следствие, для того чтобы сделать длительность прерывания сигнала по возможности короткой, требуется, чтобы сигналы а и b, посылаемые от IMES передатчиков А (801) и В(802), имели малые различия по несущим частотам и фазам кода расширения.
[0009] С этой точки зрения, чтобы иметь возможность принимать IMES сигналы, приемник внутренне генерирует сигнал, называемый сигналом-репликой, состоящий из частоты и кода расширения, идентичных таковым для сигнала, который IMES передатчик передает, и затем выполняет демодуляцию с сохранением корреляции с передаваемыми сигналами. Типовой приемник сигнала позиционирования иллюстрируется в блочной конфигурации на фиг. 9. Приемник 900 сигнала позиционирования на фиг. 9 содержит антенну 901 для приема сигналов, секцию 902 приема для выполнения обработки усиления сигналов, принимаемых через антенну 901, причем обработка приема включает в себя понижающее преобразование и аналого-цифровое (A/D) преобразование и другое и преобразование в цифровой сигнал промежуточной частоты (цифровой IF сигнал; IF - промежуточная частота), генератор 904 реплики кода для генерации сигналов реплики кода и умножители 905 и 906, каждый из которых умножает сигнал с секции 902 приема и сигнал с генератора 904 реплики кода.
[0010] Далее, приемник 900 сигнала позиционирования включает в себя генератор 907 реплики несущей волны для генерации сигнала реплики несущей волны в приемнике, умножители 908 и 909, которые умножают выходы с умножителей 905 и 906 на сигнал sin ωrt и сигнал cos ωrt, то есть сигналы реплики несущей волны, отличающиеся на 90 градусов по фазе друг от друга, с генератора 904 реплики кода, соответственно, и дополнительно содержит интегратор 910 для интегрирования выходов с умножителя 909 за предопределенный период времени и контроллер 912 операции для выполнения интеграции выходов с интеграторов 910 и 911 (интеграции перед возведением в квадрат и интеграции после возведения в квадрат) для улучшения отношения S/N программно-реализуемым (или компьютерно-программируемым) методом и дополнительно для управления генератором 904 реплики кода и генератором 907 реплики несущей волны для дополнения сигнала и отслеживания сигнала.
[0011] При этом контроллер 912 операции способен модифицировать код, генерируемый генератором 904 реплики кода программно-реализуемым (или компьютерно-программируемым) методом. Дополнительно, контроллер 912 операции извлекает навигационные сообщения на основе принятого сигнала спутникового позиционирования и выполняет операцию позиционирования и др.
[0012] В процессе демодуляции этот приемник выполняет поиск по частоте для нахождения частот несущей волны вещания и несущей волны сигнала-реплики, которые должны совпадать друг с другом (более правильно, с точностью в пределах ±500 Гц, как описано выше), и поиск по фазе кода для нахождения кодовых фаз кода расширения, посланного с INES передатчика, и кода расширения сигнала-реплики, которые становятся совпадающими друг с другом. Как показано на фиг. 10, когда сигнал-реплика и сигнал вещания приходят в совпадение друг с другом, по несущей частоте и кодовой фазе, корреляция с сигналом вещания максимизируется по значению, и затем сигнал вещания может быть принят.
[0013] В дополнение, для коммутации сигнала без выполнения этого поиска по несущей частоте и кодовой фазе, как описано непосредственно выше, точность несущей частоты должна быть примерно равна 0,2Е-6 (0,2 части на миллион) или менее, и точность кодовой фазы должна быть равна ±300 нс или менее.
Список документов предшествующего уровня техники
Патентные документы
[0014]
Патентный документ 1: выложенная патентная публикация Японии № 2009-85928
Патентный документ 2: выложенная патентная публикация Японии № 2009-133731
Сущность изобретения
Цели, достигаемые изобретением
[0015] В этих обстоятельствах, чтобы все IMES передатчики были способны посылать IMES сигналы, имеющие идентичные несущие частоты, требуется, чтобы основное колебание в передатчике имело малую девиацию в отношении его номинальной частоты, малую вариацию по частоте и низкую температурную зависимость, которая характеризует собой то, что основное колебание свободно от вариаций по частоте, обусловленных вариациями внешней температуры. В общем случае, осцилляторы, имеющие эти характерные особенности, являются жестко управляемыми и контролируемыми по температуре в термостатических камерах и могли бы быть заменены атомными часами, в которых используется резонанс атома, имеющего некоторую конкретную частоту, что приводит в результате к недостаткам, заключающимся в высоких затратах на оборудование и больших размерах.
[0016] Кроме того, каким бы дорогостоящим ни являлся осциллятор, вариации частоты все равно будут вызываться продолжительным сроком использования. Поэтому имеет место нежелательная необходимость в регулярной калибровке частоты.
[0017] В качестве одного из способов ограничения этих долговременных вариаций частоты, известен способ коррекции долговременной вариации осциллятора посредством приема GPS сигнала. Однако, хотя GPS сигнал может легко приниматься в среде внешней установки, имеется проблема, состоящая в том, что GPS сигнал не может приниматься, ввиду его трудной достижимости, в среде внутри помещений, такой как в зданиях и подземных торговых центрах.
[0018] В качестве средства решения этой проблемы известно использование GPS ретранслятора. Он вводит GPS сигналы, принимаемые во внешней среде, внутрь здания по кабелю и повторно передает их в здании. Однако при применении этого средства для частотной синхронизации передатчиков навигационного сигнала, установленных на земле, необходимо отдельно вводить систему GPS ретранслятора, что приводит к дополнительной необходимости монтажа системы GPS ретранслятора и, как следствие, затратам на конструирование. В дополнение, GPS сигналы, передаваемые от GPS ретранслятора, превращаются в главный источник помех для пользователей, которые намереваются принимать входящие истинные GPS сигналы, хотя и в слабой степени, извне посредством, например, чувствительного приемника.
[0019] В качестве альтернативного средства частотной синхронизации наземных навигационных сигналов в среде внутри помещений имеется одно, которое реализует частотную синхронизацию посредством двусторонней проводной передачи или беспроводной передачи синхронизирующих (тактовых) сигналов между передатчиками. Однако при применении этого средства для частотной синхронизации передатчика навигационного сигнала, установленного на земле, необходимо обеспечить передатчики схемами передачи синхронизирующих сигналов, помимо навигационных сигналов, что приводит к недостаткам, заключающимся в увеличении количества деталей в передатчике и в повышении потребления электрической мощности.
[0020] Основной целью вариантов осуществления настоящего изобретения является по меньшей мере смягчить эти традиционные технические проблемы. То есть настоящее изобретение относится к способу экономичного и надежного снижения девиации частоты навигационного сигнала, передаваемого в наземных условиях, и целью, достигаемой настоящим изобретением, является исключение использования высокоточных и дорогостоящих осцилляторов, требуемых в обычных передатчиках, путем обеспечения способа генерации навигационного сигнала.
[0021] Дополнительно, второй целью вариантов осуществления настоящего изобретения является хронировать (тактировать) передаваемые в наземных условиях навигационные сигналы. То есть настоящее изобретение относится к способу обеспечения тактовой синхронизации (тайминга) передаваемого в наземных условиях навигационного сигнала с определенной опорой, и целью, достигаемой настоящим изобретением, является обеспечить усовершенствование в удобстве во время приема сигнала, такое как уменьшение времени обнаружения сигнала, являющееся результатом уменьшения разности фаз кода расширения среди множества передаваемых в наземных условиях навигационных сигналов, которые обычно существуют не в те же самые моменты времени, с помощью согласования тактирований среди навигационных сигналов абсолютно или, иначе, относительно и абсолютно, посредством обеспечения способа генерации навигационного сигнала.
[0022] В свете технических задач, описанных выше, изобретателями обнаружено, что когда IMES сигналы а и b идентичны по несущей частоте и фазе кода расширения, передатчики могут принимать IMES сигналы а и b без поиска по их несущей частоте и фазе кода расширения путем использования информации о несущей частоте и фазе кода расширения, определенных согласно принятым IMES сигналам а, так, чтобы тем самым иметь возможность выполнять плавное переключение принимаемого сигнала с IMES сигнала а на IMES сигнал b.
Средство для решения задачи
[0023] Передатчик навигационного сигнала согласно настоящему изобретению характеризуется тем, что содержит секцию приема для приема передаваемой волны и генерации импульса синхронизации в синхронизации с предопределенным кадром данных; секцию синхронизации опорного сигнала для генерации основного колебания внутреннего тактового сигнала с использованием импульса, сгенерированного в приемной секции в качестве опорного импульса; секцию генерации IMES сигнала для генерации IMES сигнала на основе основного колебания внутреннего тактового сигнала; и передающую антенну, посредством которой передается IMES сигнал, сгенерированный в секции генерации IMES сигнала, причем секция синхронизации опорного сигнала содержит схему счетчика, компаратор, фильтр управления нижних частот, цифроаналоговый (D/A) преобразователь, управляемый напряжением осциллятор и схему деления частоты, причем схема счетчика действует для счета количества тактовых импульсов, генерируемых в управляемом напряжением осцилляторе, с использованием сигнального входа из передаваемой волны в качестве опорного сигнала, и компаратор действует для сравнения отсчитанного значения с опорным значением, и при этом секция синхронизации опорного сигнала конфигурирована, чтобы, когда отношение величин в качестве результата сравнения в компараторе совпадает с предопределенным значением и продолжается предопределенное количество раз в одном направлении, управляемым образом настраивать уровень управляющего напряжения управляемого напряжением осциллятора.
[0024] Секция синхронизации опорного сигнала конфигурирована, чтобы, когда отношение величин как результат сравнения в компараторе превышает предопределенное значение, управляемым образом отбрасывать отсчитанное значение.
[0025] Секция синхронизации опорного сигнала конфигурирована, чтобы, когда отношение величин как результат сравнения в компараторе превышает предопределенное значение, и значение, превышающее предопределенное значение, продолжается предопределенное количество раз в пределах предопределенного временного периода, управляемым образом изменять значение как постоянную времени.
[0026] Способ передачи навигационного сигнала согласно настоящему изобретению характеризуется тем, что содержит этапы приема, посредством секции приема, передаваемой волны и генерации импульса синхронизации в синхронизации с предопределенным кадром данных; генерации, посредством секции синхронизации опорного сигнала, основного колебания внутреннего тактового сигнала с использованием импульса, сгенерированного в секции приема в качестве опорного импульса; генерации, посредством секции генерации IMES сигнала, IMES сигнала на основе основного колебания внутреннего тактового сигнала; и передачи, посредством передающей антенны, IMES сигнала, сгенерированного в секции генерации IMES сигнала, причем секция синхронизации опорного сигнала содержит схему счетчика, компаратор, фильтр управления нижних частот, D/A преобразователь, управляемый напряжением осциллятор и схему деления частоты, и при этом этап генерации основного колебания внутреннего тактового сигнала включает в себя подсчет, посредством схемы счетчика, количества тактовых импульсов, генерируемых в управляемом напряжением осцилляторе, с использованием сигнального входа из передаваемой волны в качестве опорного сигнала, и компаратор действует для сравнения отсчитанного значения с опорным значением, и когда отношение величин в качестве результата сравнения в компараторе совпадает с предопределенным значением и продолжается предопределенное количество раз в одном направлении, настройку управляемым образом уровня управляющего напряжения управляемого напряжением осциллятора.
Результат, обеспечиваемый изобретением
[0027] Передатчик навигационного сигнала и способ передачи навигационного сигнала согласно настоящему изобретению делают возможным уменьшение девиации частоты передаваемых в наземных условиях навигационных сигналов экономичным и надежным образом и исключение использования высокоточных и дорогостоящих осцилляторов, которые необходимым образом устанавливались в обычных передатчиках. Кроме того, передатчик навигационного сигнала и способ передачи навигационного сигнала согласно настоящему изобретению делают возможным обеспечение усовершенствования в удобстве во время приема сигнала, такое как уменьшение времени обнаружения сигнала, являющееся результатом уменьшения разности фаз кода расширения среди множества передаваемых в наземных условиях навигационных сигналов с помощью согласования тактирований среди навигационных сигналов абсолютно или, иначе, относительно и абсолютно.
Краткое описание чертежей
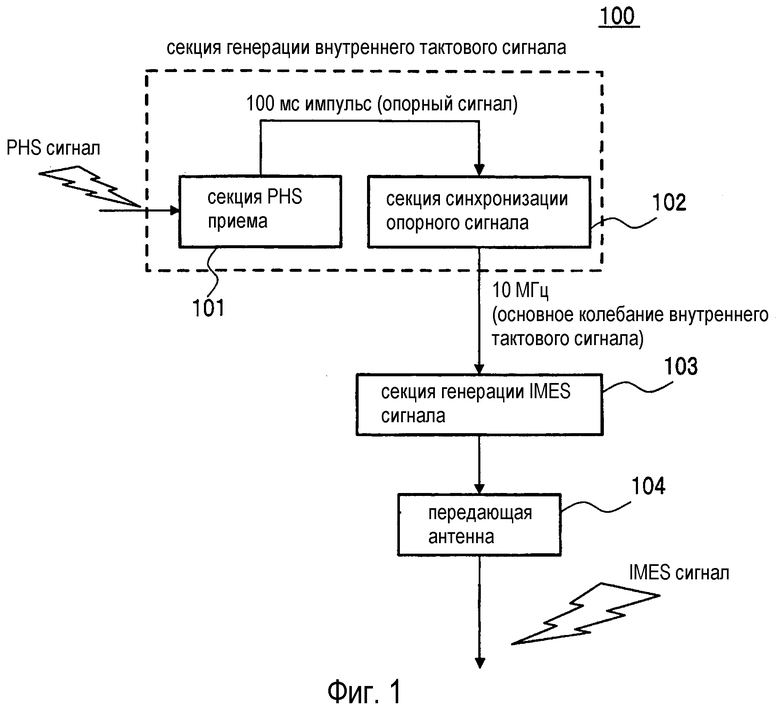
[0028] Фиг. 1 - пояснительный чертеж для иллюстрации структуры передатчика навигационного сигнала согласно варианту осуществления настоящего изобретения.
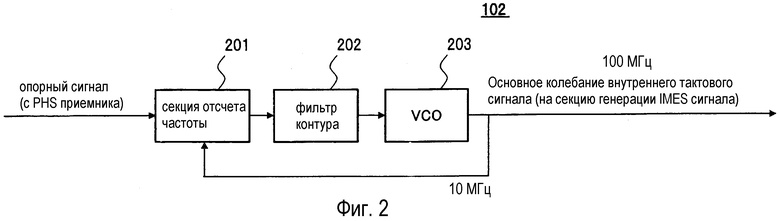
Фиг. 2 - пояснительный чертеж для иллюстрации блочной конфигурации секции синхронизации опорного сигнала в передатчике навигационного сигнала согласно варианту осуществления настоящего изобретения.
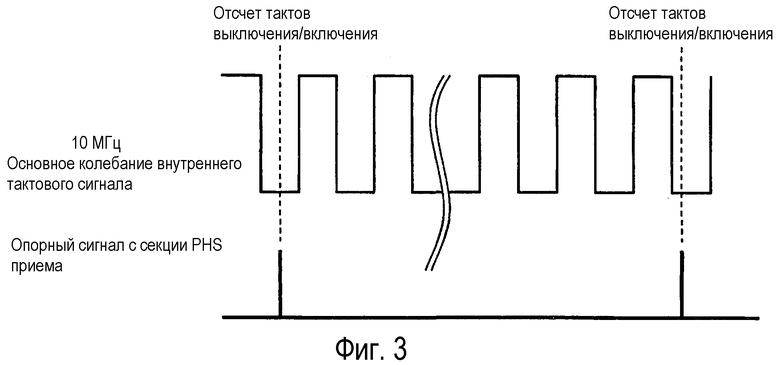
Фиг. 3 - пояснительный чертеж для иллюстрации работы секции подсчета частоты в секции синхронизации опорного сигнала передатчика навигационного сигнала согласно варианту осуществления настоящего изобретения.
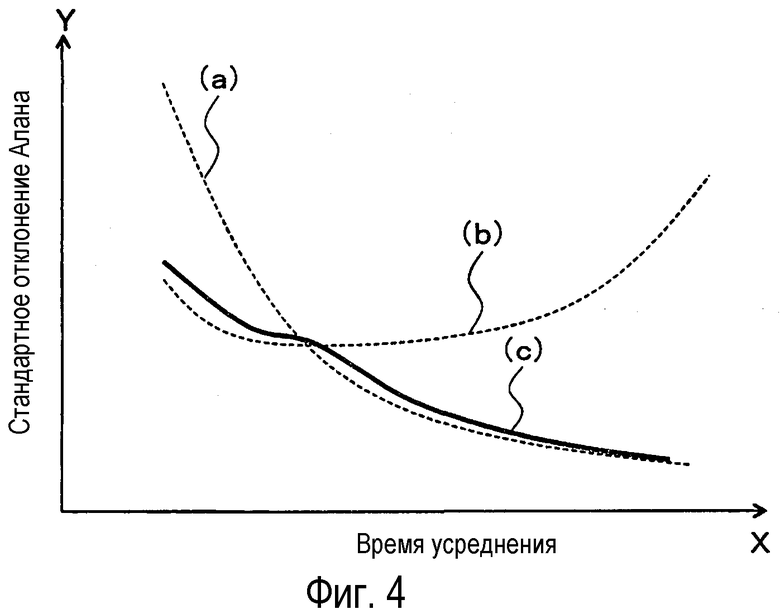
Фиг. 4 - пояснительная диаграмма для иллюстрации степени стабильности частоты (стандартное отклонение Алана) каждого сигнала в секции синхронизации опорного сигнала передатчика навигационного сигнала согласно варианту осуществления настоящего изобретения.
Фиг. 5А - пояснительный чертеж для иллюстрации секции синхронизации опорного сигнала для осуществления временной синхронизации в передатчике навигационного сигнала согласно варианту осуществления настоящего изобретения.
Фиг. 5В - пояснительный чертеж для иллюстрации секции синхронизации опорного сигнала для осуществления временной синхронизации в передатчике навигационного сигнала согласно другому варианту осуществления настоящего изобретения.
Фиг. 5С - блок-схема для иллюстрации последовательности операций в секции синхронизации опорного сигнала для осуществления временной синхронизации в передатчике навигационного сигнала согласно варианту осуществления настоящего изобретения.
Фиг. 6 - пояснительный чертеж для иллюстрации соотношения между сигналом тактовой синхронизации и кодом расширения в передатчике навигационного сигнала согласно варианту осуществления настоящего изобретения.
Фиг. 7 - пояснительный чертеж для иллюстрации структуры передатчика навигационного сигнала согласно другому варианту осуществления настоящего изобретения.
Фиг. 8 - пояснительный чертеж для иллюстрации ситуации, в которой пользователь, имеющий обычный IMES передатчик, перемещается из сигнальной области для обычного передатчика А в сигнальную область для передатчика ВА.
Фиг. 9 - пояснительный чертеж для иллюстрации блочной конфигурации схемы приемника обычного приемника сигнала позиционирования.
Фиг. 10 - пояснительный чертеж для иллюстрации концепции поиска несущей частоты и фазы кода обычного сигнала позиционирования.
Описание вариантов осуществления
[0029] Передатчик навигационного сигнала и способ генерации навигационного сигнала согласно настоящему изобретению поясняются далее более детально.
[0030] Вариант осуществления 1
Фиг. 1 иллюстрирует структуру передатчика навигационного сигнала согласно варианту осуществления настоящего изобретения. Здесь предполагается в этом варианте осуществления, что PHS сигнал будет представлять собой «некоторого рода сигнал внешней системы (передаваемую волну»). Передатчик 100 навигационного сигнала содержит PHS секцию 101 приема, секцию 102 синхронизации опорного сигнала, секцию 103 генерации IMES сигнала и передающую антенну 104. Кроме того, PHS секция 101 приема и секция 102 синхронизации опорного сигнала образуют секцию генерации внутреннего тактового сигнала (которая соответствует внутреннему тактовому генератору 231, показанному на фиг. 2 патентного документа 1). Однако в традиционных внутренних тактовых генераторах, таких, как иллюстрируется на фиг. 2 патентного документа 1, используется, например, дорогостоящий ОСХО (термостатированный кварцевый генератор), чтобы поддерживать высокую степень точности частоты.
[0031] В передатчике 100 навигационного сигнала PHS секция 101 приема, которая является компонентом внутреннего тактового генератора, как показано на фиг. 1, принимает PHS радиоволну диапазона 1.9 ГГц, переданную от PHS базовой станции, и генерирует импульсы 100 мс в синхронизации с кадром PHS данных. Поскольку частотный сдвиг PHS базовой станции мал, и множество PHS базовых станций синхронизированы друг с другом, цикл кадра PHS данных удовлетворяет некоторому стандарту, даже если имеется отклонение во внутреннем тактовом сигнале PHS секции приема в передатчике. То есть частота повторения кадра PHS данных имеет малый частотный сдвиг.
[0032] В данный момент, рассматривая синхронизацию с сигналом некоторого рода от внешней системы, принимая его в качестве радиоволны, распространяющейся в воздухе, возможны методы синхронизации с несущей частотой радиоволны, распространяющейся через воздух, или генерации хронирующего (тактового) сигнала в соответствии с несущей волной.
Однако, поскольку несущая частота изменяется в соответствии со схемами модуляции радиоволны (частота динамически изменяется посредством частотной модуляции (FM), схемы скачкообразного изменения частоты в FDMA и CDMA), настоящее изобретение характеризуется синхронизацией не с несущей волной, а вместо этого - с циклом кадра данных.
[0033] Затем импульс цикла 100 мс, выведенный из PHS секции 101 приема на фиг. 1, вводится в секцию 102 синхронизации опорного сигнала в качестве опорного сигнала. Секция 102 синхронизации опорного сигнала генерирует основное колебание внутреннего такта в частотной синхронизации с опорным сигналом и выводит его на секцию 103 генерации IMES сигнала. Также возможно вывести его на MUX 232, как проиллюстрировано на фиг. 2 патентного документа 1 вместо секции 103 генерации IMES сигнала.
[0034] Затем секция 103 генерации IMES сигнала на фиг. 1 генерирует IMES сигнал, раскрытый в патентных документах 1 и 2, и затем передает сигнал через передающую антенну 104.
[0035] Здесь следует отметить, что сигнал, выведенный с PHS секции 101 приема и введенный как опорный сигнал в секцию 102 синхронизации опорного сигнала, находится в синхронизации с PHS радиоволной, распространяющейся по воздуху.
[0036] PHS секция 101 приема может быть секцией приема, способной принимать сигнал иной, чем PHS сигнал (например, GSM, LTE или коммерческие источники мощности). Даже используя сигнал иной, чем PHS сигнал, можно использовать конфигурацию, описанную в следующих абзацах или далее относительно деталей обработки сигнала. Далее описание будет делаться в предположении, что сигнал, принимаемый в секции 101 приема, является PHS сигналом.
[0037] Фиг. 2 показывает блок-схему, иллюстрирующую детальную структуру секции 102 синхронизации опорного сигнала. Секция 102 синхронизации опорного сигнала содержит секцию 201 счета частоты, счетчик 202 контура и VCO (управляемый напряжением осциллятор) 203, где опорный сигнал, введенный из PHS секции 101 приема, в конечном счете, вводится в секцию 103 генерации IMES сигнала в качестве основного колебания внутреннего тактового сигнала частоты 10 МГц.
[0038] Далее работа секции 201 счета частоты в секции 102 синхронизации опорного сигнала показана на фиг. 3. В секции 201 счета частоты сигнал, введенный из PHS секции 101 приема, используется как опорный сигнал для секции 102 синхронизации опорного сигнала, с помощью этого сигнала она запускается, чтобы отсчитывать число тактовых импульсов, генерируемых VCO 203 в секции 102 синхронизации опорного сигнала с использованием схемы счетчика (не показана), как иллюстрируется на фиг. 3. Измеренное значение счета тактовых импульсов сравнивается с числом импульсов, определенных на основе номинальной частоты VCO 203 и номинального значения цикла импульсов опорного сигнала в схеме сравнения (не показана), и значение разности между числом импульсов подвергается сглаживанию в фильтре 202 контура, преобразуется в напряжение постоянного тока (DC) путем установки соответствующего усиления и выполнения D/A преобразования и затем вводится в VOC 203. Это DC напряжение пропорционально разности частот между опорным сигналом и основным колебанием внутреннего тактового сигнала, и VCO 203 настраивает собственную частоту в соответствии с напряжением так, чтобы при этом поддерживать разность частот между опорным сигналом и основным колебанием внутреннего тактового сигнала постоянной.
[0039] В этот момент число импульсов, определенное на основе номинальной частоты VCO 203 и номинального значения цикла импульсов опорного сигнала, составляет:
10*10^6*0,1=1000000 [импульсов]
в случае, если номинальная частота VCO 203 равна 10 МГц, и номинальное значение цикла импульсов опорного сигнала равно 100 мс.
[0040] Результаты передатчика навигационного сигнала и другого в настоящем изобретении
Фиг. 4 иллюстрирует пояснительную диаграмму для обеспечения пояснения стабильности опорного сигнала и основного колебания внутреннего тактового сигнала, генерируемого в ассоциации с работой секции 102 синхронизации опорного сигнала. В первый момент на фиг. 4: (а) - типичный пример степени стабильности частоты (стандартное отклонение Алана) опорного сигнала в секции 102 синхронизации опорного сигнала, т.е. выходной сигнал с PHS секции приема; (b) - пример степени стабильности частоты только VCO, включенного в секцию синхронизации опорного сигнала. Можно видеть из характеристики (а), что опорный сигнал имеет очень хорошую долговременную стабильность частоты, но он лишен кратковременной стабильности частоты. Можно видеть из характеристики (b), что VCO лишен долговременной стабильности частоты, но имеет очень хорошую кратковременную стабильность частоты.
[0041] Затем, характеристика (с) указывает стабильность частоты тактового сигнала, выведенного из секции 102 синхронизации опорного сигнала передатчика навигационного сигнала (и другого) согласно настоящему изобретению. Согласно характеристике (с), тактовый сигнал сопоставим с опорным сигналом (т.е. PHS радиоволной) по долговременной стабильности и имеет кратковременную стабильность частоты на уровне с VOC. Таким образом, можно видеть, что тактовый сигнал демонстрирует согласованные рабочие характеристики в широком диапазоне частот по длинному и короткому интервалу времени.
[0042] Вариант осуществления 2
Фиг. 5А иллюстрирует второй вариант осуществления настоящего изобретения, структуру секции синхронизации опорного сигнала для выполнения временной синхронизации в передатчике навигационного сигнала. Блок 500 синхронизации опорного сигнала содержит секцию 501 сравнения фаз, фильтр 502 контура, VCO 503 и делитель 504 частоты.
[0043] В секции 501 сравнения фаз измеряется разность фаз с использованием сигнального выхода с PHS секции приема в качестве опорного сигнала блока синхронизации опорного сигнала для выполнения сравнения фаз с сигналом, генерируемым делителем 504 частоты в секции PLL. Измеренная разность фаз подвергается сглаживанию в фильтре 502 контура, преобразуется в напряжение постоянного тока посредством D/C преобразования с соответствующей установкой усиления и вводится в VOC 503. Это напряжение постоянного тока пропорционально разности фаз между опорным и разделенным по частоте сигналами, так что VCO 503 поддерживает разность фаз постоянной путем настройки своей собственной частоты соответственно напряжению.
[0044] В этом варианте осуществления секция синхронизации опорного сигнала выводит, в дополнение к основному колебанию внутреннего тактового сигнала, импульс тактового сигнала временной синхронизации, имеющий цикл импульса, равный целому кратному 1 мс (который может быть равным 10 мс, 100 мс или 1000 мс, в качестве примера, и отличается от импульса опорного сигнала на фиг. 7), чтобы управлять таймингом PRN кода (эти импульсы тактового сигнала временной синхронизации канализируются от 702 к 703 на фиг. 7, как описано ниже).
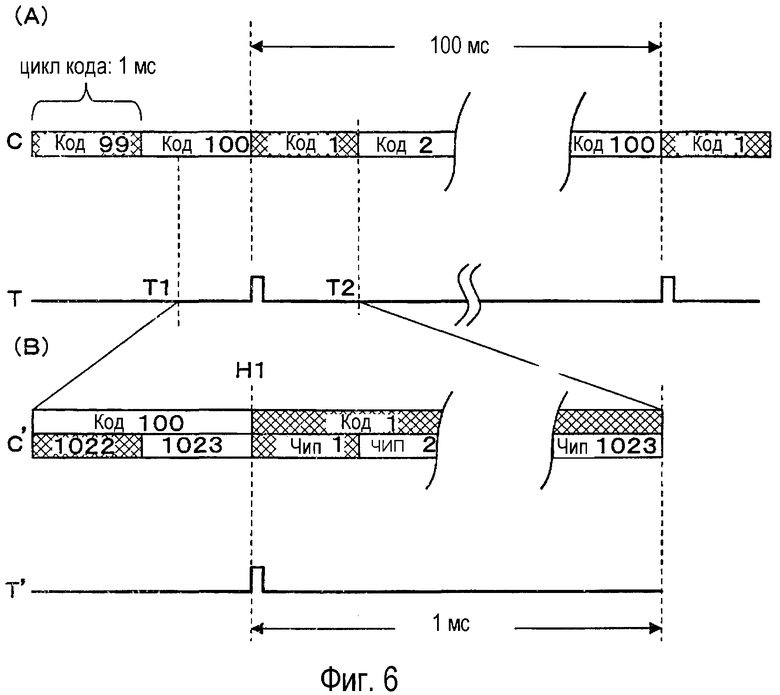
Пример управления таймингом PRN кода иллюстрируется на фиг. 6. Фиг. 6(А) отражает код С расширения с циклом 1 мс, который генерируется в секции генерации IMES сигнала и с которым синхронизируется тактовый сигнал Т временной синхронизации. Фиг. 6(В) является увеличенным видом интервала Т1-Т2 на фиг. 6(А), в котором тайминг тактового сигнала синхронизирован с PHS радиоволной путем вещания кода С' расширения, имеющего число битов (чипов) 1023 бита (1023 чипа), при управлении передним концом его (при тайминге, когда код 1 и чип 1 совпадают друг с другом), чтобы быть в синхронизации с импульсом тактового сигнала Т' временной синхронизации.
[0045] Вариант осуществления 3
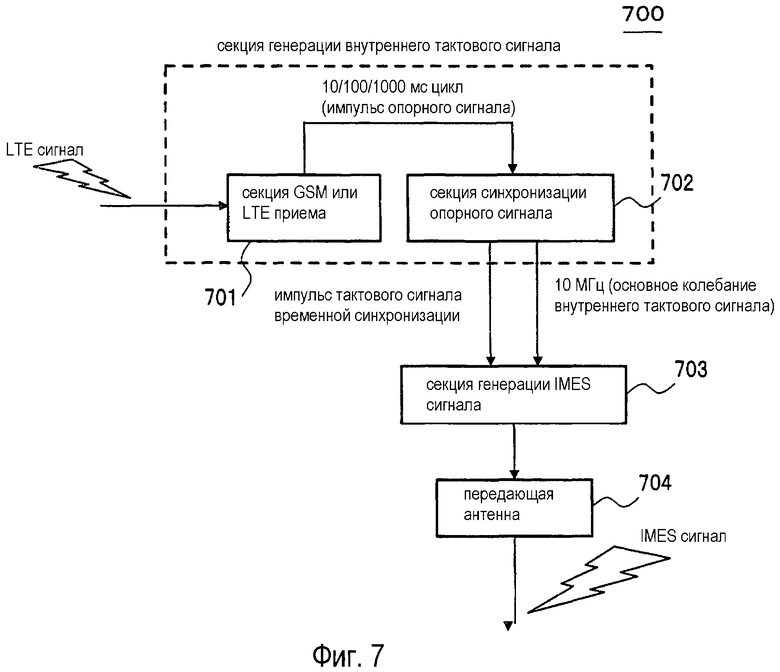
Фиг. 7 иллюстрирует, в качестве третьего варианта осуществления настоящего изобретения, структуру, для которой радиоволна мобильного телефона, в частности, GSM и LTE, используется некоторого рода сигнал внешней системы. Передатчик 700 сигнала навигационной системы содержит GSM или LTE секцию приема (обозначенную в целом как секция 701 приема) для приема GSM сигнала или LTE сигнала, секцию 702 синхронизации опорного сигнала, секцию 703 генерации IMS сигнала и передающую антенну 704. То есть, в этом варианте осуществления, GSM или LTE секция 701 приема используется вместо PHS секции 101 приема, чтобы вводить импульсы 10 мс, 100 мс или 1000 мс в качестве опорного сигнала в секцию 702 синхронизации опорного сигнала. Необходимо только в модификации секции 702 синхронизации опорного сигнала изменить значение, подлежащее сравнению с некоторым числом импульсов, отсчитываемых счетчиком частоты (не показан на фиг. 7), до 10 мс, 100 мс или 1000 мс, не требуя никакого структурного изменения иного, чем GSM или LTE секция 701 приема. Это делает возможным удобным образом использовать радиоволны иные, чем PHS, такие как GSM или LTE.
В этот момент, циклы импульса опорного сигнала (10 мс, 100 мс, 1000 мс) отдельно используются согласно варианту осуществления коммуникационной инфраструктуры. Например, только опорный сигнал 100 мс доступен для PHS, и опорный сигнал 10 мс - для CDMA.
[0046] Вариант осуществления 4
В качестве четвертого варианта осуществления настоящего изобретения коммерческий источник питания может быть использован как некоторого рода сигнал внешней системы. В этом варианте осуществления секция приема коммерческого источника питания используется вместо секции 701 приема для ввода импульсов 10 мс, 100 мс или 1000 мс, получаемых из частоты питания (50/60 Гц в Японии) в качестве опорного сигнала в секцию 702 синхронизации опорного сигнала. В случае коммерческого источника питания тот же самый источник питания используется, например, в одном здании. Таким образом, IMES передатчики в том же самом здании будут иметь ту же самую относительную частоту даже в случае низкой абсолютной точности. Это позволяет IMES передатчикам находиться в частотной синхронизации даже в месте, где недоступны радиоволны, такие как PHS, GSM и LTE.
[0047] Вариант осуществления 5
В качестве пятого варианта осуществления настоящего изобретения фиг. 5В иллюстрирует структуру секции синхронизации опорного сигнала для выполнения временной синхронизации в передатчике сигнала синхронизации. Секция 550 синхронизации опорного сигнала содержит схему 551 счетчика, схему 552 удержания, компаратор 553, фильтр 554 управления нижних частот, D/A преобразователь 555, управляемый напряжением осциллятор 556 и схему 557 деления частоты.
[0048] Счетчик 551 считает количество тактовых импульсов (типично 10 МГц), передаваемых от управляемого напряжением осциллятора (VCXO) 556, и передает отсчитанное значение на схему 552 удержания в каждые 100 мс, в которые обеспечивается опорный импульс. Кроме того, отсчитанное значение сравнивается с опорным значением для сравнения в компараторе 553 (типично 1000000 раз), и в качестве первой фильтрации, когда отсчитанное значение импульсов VCXO отклоняется на более чем ±10% от опорного значения, оно игнорируется как выброс (аномальное значение).
Затем, в качестве второй фильтрации, когда отношение величин в качестве результата сравнения продолжается n раз в сторону увеличения (+ направление) или в сторону уменьшения (- направление), уровень управления напряжением управляемым образом изменяется на единицу. То есть, если измерение в + направлении продолжается n раз, уровень напряжения управления уменьшается на единицу (-1) относительно текущего уровня, а если измерение в - направлении продолжается n раз, уровень напряжения управления увеличивается на один (+1) относительно текущего уровня. В этот момент величина управления напряжением для единичного уровня равна 2.5(В)/4096(В), если управление выполняется с разрешением 120 битов.
Далее, импульс тактового сигнала синхронизации выводится из схемы 557 деления частоты.
[0049] На фиг. 5В RIN обозначает вход сброса, CLIN обозначает тактовый вход, CNTOUT обозначает выход отсчитанного значения, CNTIN обозначает вход отсчитанного значения, и STIN обозначает вход установки тактирования.
[0050] Таким способом компаратор 553 и фильтр 554 управления нижних частот имеют структуру, для которой на фиг. 5В применен так называемый фильтр случайного блуждания. Альтернативно, настоящее изобретение характеризуется настройкой упомянутого n (постоянной времени фильтра), где большее значение n приводит к увеличенному периоду времени до сходимости, но опыты показали, что при использовании PHS сигнала в качестве импульса опорного сигнала отличные результаты получаются при установке n примерно на 10. Кроме того, желательно устанавливать n примерно равным 2 при использовании CDMA сигнала в качестве импульса опорного сигнала.
[0051] В данный момент, поскольку импульс опорного сигнала генерируется на цикл 100 мс, настройка управления напряжением проводится с частотой один раз в секунду, когда n установлено на 10, и один раз в 0,2 секунды, когда n равно 2.
[0052] В общем случае, при использовании PHS сигнала в качестве импульса опорного сигнала, передатчик навигационного сигнала будет приближенно синхронизироваться по частоте с импульсом опорного сигнала за примерно от 15 до 30 минут после его установки. Однако в случае резкого повышения температуры передатчика навигационного сигнала, например, вследствие возникновения пожара, точная работа передатчика может не обеспечиваться. В таком случае, синхронизация с импульсом опорного сигнала по частоте теряется, так что необходимо быстро вернуться к временной синхронизации. Соответственно, для обнаружения чрезвычайной ситуации, такой как резкое повышение температуры, например, в случае пожара, можно установить отдельный датчик температуры. Однако, поскольку такая установка требует дополнительных схем и связана с дополнительными затратами, также возможно осуществить конфигурирование, чтобы принимать решение относительно чрезвычайной ситуации путем обнаружения аномального отсчитанного значения. Более конкретно, если отклонение в ±10% или более для значения VCXO продолжается предопределенное количество раз (например, 100 или 150 раз) в течение предопределенного периода времени (например, в течение 20 или 30 секунд), то определяется, что температура является аномальной (возникает чрезвычайная ситуация, например пожар).
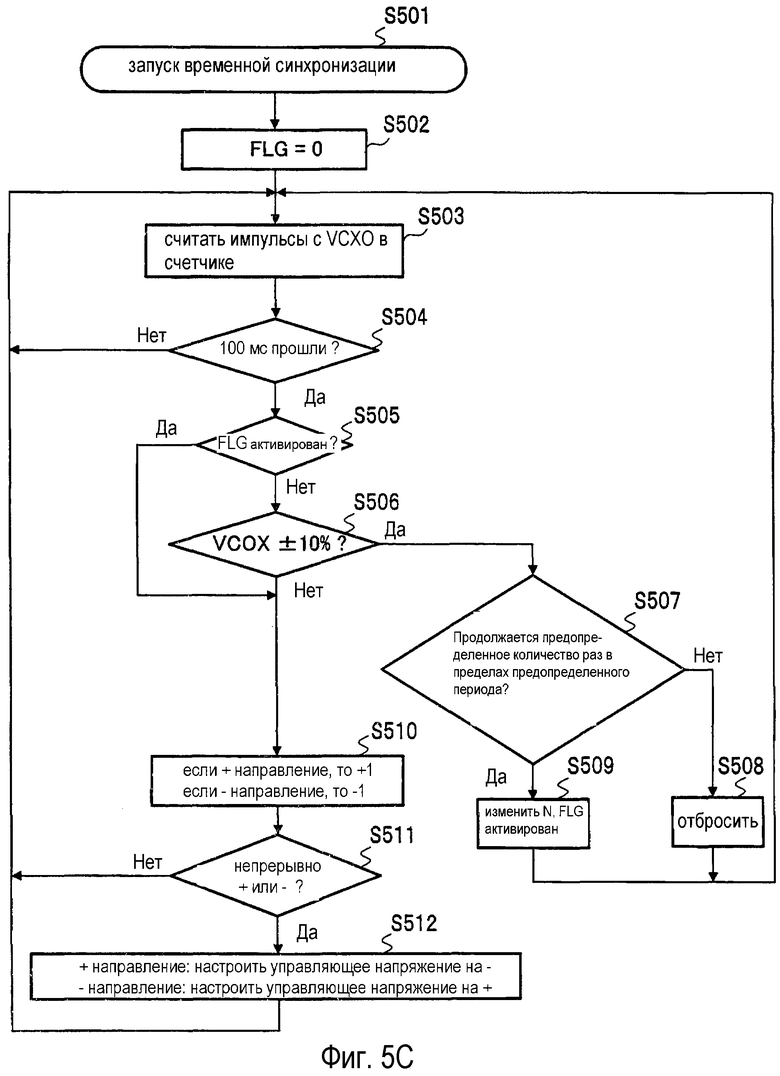
[0053] Детальная последовательность операций в этом случае иллюстрируется на фиг. 5С. Когда тактовая синхронизация начинается на этапе S501, процесс переходит к этапу S502, где устанавливается флаг для проверки, возникает ли какая-либо чрезвычайная ситуация, такая как резкое повышение температуры вследствие пожара (далее упоминается как флаг чрезвычайной ситуации).
[0054] Затем процесс переходит к этапу S503, где импульсы, эмитированные из VCOX, отсчитываются в счетчике. На этапе S504 измеряется время на основе PHS основного колебания, чтобы определить, прошло ли 100 мс. Если 100 мс еще не прошли («Нет» на этапе S504), то процесс возвращается к этапу S503, а если 100 мс прошли, то процесс переходит к этапу S505, чтобы проверить, активирован ли флаг чрезвычайной ситуации. На этапе S505, если флаг чрезвычайной ситуации активирован, то процесс переходит к этапу S510, а если флаг чрезвычайной ситуации деактивирован, то процесс переходит к этапу S506.
[0055] На этапе S506 выполняется определение, находится ли значение VCXO в пределах ±10%. Если значение VCXO находится в пределах ±10%, то это определяется как нормальная ситуация и настройка напряжения управления выполняется (этап S510), в то время как если оно превышает ±10%, то выполняется определение, является ли значение ошибкой, которая должна быть исключена (аномальный выброс), или чрезвычайной ситуацией (этап S507). На этапе S507 определяется, превышает ли значение VCXO ±10%, и продолжается ли это предопределенное количество раз в пределах предопределенного периода времени. В качестве примера, определяется, продолжается ли это 100 раз в течение 20 секунд или 150 раз в течение 30 секунд. Если это продолжается предопределенное количество раз в пределах предопределенного периода времени («Да»), то процесс переходит к этапу S509, где определяется, что внешняя температура резко увеличивается вокруг местоположения, где установлен передатчик навигационного сигнала, вследствие чрезвычайной ситуации, такой как пожар, и постоянная времени n изменяется до значения меньшего, чем текущее установленное значение (например, с n=10 до n=2). Затем флаг чрезвычайной ситуации активируется.
На этапе S507, если значение VCXO, превышающее ±10%, не продолжается предопределенное количество раз в пределах предопределенного периода времени, это значение отбрасывается как аномальный выброс.
[0056] На этапе S510, если отсчет импульсов, эмитированных из VCXO, отклоняется в положительном (+) направлении, оно отсчитывается как +1, а если оно отклоняется в отрицательном (-) направлении, то оно отсчитывается как -1, затем процесс переходит к этапу S511.
[0057] На этапе S511 определяется, продолжается ли значение, отсчитанное на этапе S510 (+ или -), n раз, причем если оно продолжается n раз («Да»), то процесс переходит к этапу S512, а если оно не продолжается n раз («Нет»), то процесс возвращается к этапу S502.
[0058] На этапе S512, если значение продолжается n раз в положительном (+) направлении, управляющее напряжение подстраивается в отрицательном (-) направлении, а если значение продолжается n раз в отрицательном (-) направлении, то управляющее напряжение подстраивается в положительном (+) направлении. Затем процесс возвращается к этапу S503.
[0059] В последовательности операций, показанной на фиг. 5С, на этапе S507 определяется, превышает ли значение VCXO ±10%, и это продолжается предопределенное количество раз в течение предопределенного периода времени. Альтернативно, но только когда значение VCXO непрерывно превышает ±10% в течение предопределенного периода времени, но также и когда количество раз для значения VCXO, превышающего ±10%, кумулятивно достигает некоторого количества раз, процесс может перейти к этапу S509, чтобы контролируемым образом активировать флаг чрезвычайной ситуации и изменить постоянную времени n на значение меньшее, чем установленное в текущий момент значение. В этом случае, когда количество раз для значения VCXO, превышающего ±10%, кумулятивно достигает 1000 раз в пределах трех минут, или когда количество раз для значения VCXO, превышающего ±10%, кумулятивно достигает 1000 раз в течение пяти минут, процесс переходит к этапу S509.
[0060] Последовательность операций для определения, продолжается ли значение VCXO, превышающее ±10%, предопределенное количество раз в течение предопределенного периода времени, имеет преимущество, заключающееся в том, что это может определить повреждения, например, вследствие пожара, за короткий период времени. С другой стороны, последовательность операций для определения, достигает ли кумулятивно количество раз для значения VCXO, превышающего ±10%, некоторое количество раз в течение предопределенного периода времени, имеет преимущество, заключающееся в том, что это может определить повреждения, например, вследствие пожара, в некоторой степени за короткий период времени, предотвращая возникновение сбоев в работе.
[0061] Хотя описания процесса деактивирования флага чрезвычайной ситуации опущены в последовательности операций, иллюстрируемой на фиг. 5С, в соответствии с вариантами осуществления возможны различные процедуры. Например, флаг чрезвычайной ситуации может быть деактивирован спустя предопределенный период времени, он может быть деактивирован вручную и т.д.
[0062] Альтернативно, можно управляемым образом деактивировать флаг чрезвычайной ситуации, когда значение VCXO непрерывно попадает в пределы ±10% предопределенное количество раз в течение предопределенного периода времени или когда количество раз для значения VCXO, попадающего в пределы ±10%, кумулятивно достигает некоторого количества раз в пределах предопределенного периода времени.
[0063] Очевидно, что также возможно реализовать простое управление временной синхронизацией без реализации логики обнаружения чрезвычайной ситуации (этапы S502, S505 и S509), описанной выше.
[0064] Как описано выше, передатчик навигационного сигнала согласно настоящему изобретению фокусируется на операции приема сигнала в приемнике, который принимает сигналы, основанные на высокоточном тактовом сигнале, такие как GPS, а также на проблеме с навигационными сигналами для использования в наземных приемниках для улучшения удобства использования приемников и обеспечивает экономичные средства и способ для реализации передатчика, который выполняет условие требования частотного сдвига примерно 0,02 части на миллион, чтобы преодолеть такую проблему.
[0065] GPS основывается на высокоточном тактовом сигнале. Таким образом, согласно естественной идее, специалистам в рассматриваемой области техники легко понять, что высокоточный тактовый сигнал также необходим для генерации навигационных сигналов наземного базирования, как и GPS сигналов. Однако в передатчике навигационных сигналов наземного базирования требуется не абсолютная точность по частоте, а относительная точность по частоте между каждым передатчиком. Таким образом, более важно, что каждый передатчик использует обычный стандарт частоты, а не что используемый стандарт частоты соответствует высокой точности. С другой стороны, желательно, чтобы передатчик навигационного сигнала для реализации вышеуказанного требования требовал малого количества вновь добавляемых функций и модулей. Поэтому обеспечивается результат, состоящий в том, что структурное масштабирование всей системы, включая передатчик навигационного сигнала согласно настоящему изобретению, может быть сокращено за счет использования типа стандарта частоты для передатчика навигационного сигнала наземного базирования, доступного для установки внутри помещений, имеющего область покрытия более широкую, чем таковая у передатчиков навигационного сигнала, обеспечивая ввод в эксплуатацию множества передатчиков навигационных сигналов при существующем стандарте частоты, даже если он не характеризуется как доступный в качестве общего стандарта частоты.
[0066] Следует отметить, что все технические элементы, способы и этапы процесса, описанные в пунктах формулы изобретения, описании, реферате и на чертежах, в их объединении, служат в качестве структурных элементов или структурных этапов передатчика и способа согласно настоящему изобретению, исключая комбинации, в которых по меньшей мере часть этих элементов и/или этапов являются взаимно исключающими.
Кроме того, настоящее изобретение не ограничено каким-либо индивидуальным и конкретным детальным описанием вариантов осуществления, описанных выше. В дополнение, технический объем настоящего изобретения должен быть определен в его пределах распространения не только приведенным выше описанием, но и объемом формулы изобретения и любыми перестановками и модификациями, эквивалентными пунктам формулы изобретения, которые входят в технический объем настоящего изобретения.
Разъяснение условных обозначений
[0067] 100, 500: передатчик навигационного сигнала
101: PHS секция приема
102, 702: секция синхронизации опорного сигнала
103,703: секция генерации IMES сигнала
104, 704: передающая антенна
201: секция счета частоты
202, 502: фильтр контура
203, 503: VOC (управляемый напряжением осциллятор)
501: секция сравнения фаз
504: делитель частоты
551: счетчик
552: схема удерживания
553: компаратор
554: фильтр управления нижних частот
555: цифроаналоговый преобразователь
556: управляемый напряжением осциллятор
557: схема деления частоты
701: секция GSM или LTE приема



Изобретение относится к системе позиционирования, в которой используются наземные передатчики навигационного сигнала, и обеспечивает снижение девиации частоты передаваемого в наземных условиях навигационного сигнала при низких затратах. Передатчик навигационного сигнала действует для приема передаваемой волны, генерации импульса синхронизации в синхронизации с предопределенным кадром данных, генерации основного колебания внутреннего тактового сигнала посредством секции (550) синхронизации опорного сигнала с использованием импульса синхронизации в качестве опорного сигнала, генерации IMES сигнала на основе основного колебания внутреннего тактового сигнала и передачи IMES сигнала. Секция (550) синхронизации опорного сигнала содержит схему (551) счетчика, компаратор (553), фильтр (554) управления нижних частот, цифроаналоговый (DA) преобразователь (555) и управляемый напряжением осциллятор (556). Секция (550) синхронизации опорного сигнала конфигурирована, чтобы, когда отношение величин между количеством тактовых импульсов, сгенерированных управляемым напряжением осциллятором (556) с использованием импульса синхронизации в качестве опорного сигнала и опорным значением, находится в пределах предопределенного значения и продолжается предопределенное количество раз в одном направлении, настраивать уровень управляющего напряжения управляемого напряжением осциллятора (556). 2 н. и 8 з.п. ф-лы, 12 ил.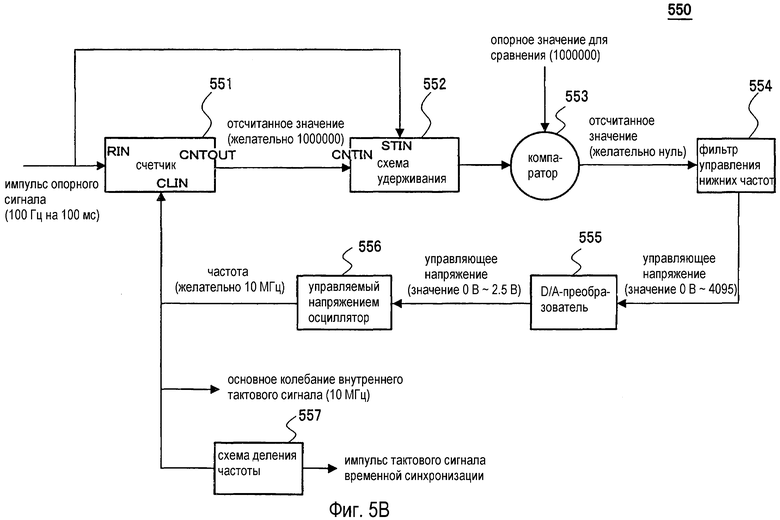
1. Передатчик навигационного сигнала, содержащий
секцию приема для приема передаваемой волны и генерации импульса синхронизации в синхронизации с предопределенным кадром данных;
секцию синхронизации опорного сигнала для генерации основного колебания внутреннего тактового сигнала с использованием импульса, сгенерированного в приемной секции в качестве опорного импульса;
секцию генерации IMES сигнала для генерации IMES сигнала на основе основного колебания внутреннего тактового сигнала; и
передающую антенну, посредством которой передается IMES сигнал, сгенерированный в секции генерации IMES сигнала,
причем секция синхронизации опорного сигнала содержит схему счетчика, компаратор, фильтр управления нижних частот, цифроаналоговый (D/A) преобразователь, управляемый напряжением осциллятор и схему деления частоты,
причем схема счетчика действует для счета количества тактовых импульсов, генерируемых в управляемом напряжением осцилляторе, с использованием сигнального входа из передаваемой волны в качестве опорного сигнала, и компаратор действует для сравнения отсчитанного значения с опорным значением, и
причем секция синхронизации опорного сигнала конфигурирована, чтобы, когда отношение величин в качестве результата сравнения в компараторе совпадает с предопределенным значением и продолжается предопределенное количество раз в одном направлении, управляемым образом настраивать уровень управляющего напряжения управляемого напряжением осциллятора.
2. Передатчик навигационного сигнала по п.1, в котором, когда отношение величин как результат сравнения в компараторе превышает предопределенное значение, отсчитываемое значение управляемым образом отбрасывается.
3. Передатчик навигационного сигнала по п.2, в котором, когда отношение величин как результат сравнения в компараторе превышает предопределенное значение и значение, превышающее предопределенное значение, продолжается предопределенное количество раз в пределах предопределенного временного периода, значение в качестве постоянной времени управляемым образом изменяется.
4. Передатчик навигационного сигнала по любому из пп.1-3, в котором передаваемая волна является GSM или LTE волной, передаваемой от GSM или LTE базовой станции; кадр данных является GSM или LTE кадром данных; и импульс синхронизации является импульсом, имеющим цикл 10/100/1000 мс.
5. Передатчик навигационного сигнала по п.1, в котором передаваемая волна является PHS радиоволной в диапазоне 1,9 ГГц, передаваемой от PHS базовой станции; кадр данных является PHS кадром данных; и импульс синхронизации является импульсом, имеющим цикл 100 мс.
6. Передатчик навигационного сигнала по п.1, в котором передаваемая волна является волной FM вещания.
7. Передатчик навигационного сигнала по п.1, в котором передаваемая волна является волной наземного цифрового вещания.
8. Способ передачи навигационного сигнала, содержащий этапы
приема, посредством секции приема, передаваемой волны и генерации импульса синхронизации в синхронизации с предопределенным кадром данных;
генерации, посредством секции синхронизации опорного сигнала, основного колебания внутреннего тактового сигнала с использованием импульса, сгенерированного в секции приема в качестве опорного импульса;
генерации, посредством секции генерации IMES сигнала, IMES сигнала на основе основного колебания внутреннего тактового сигнала; и
передачи, посредством передающей антенны, IMES сигнала, сгенерированного в секции генерации IMES сигнала,
причем секция синхронизации опорного сигнала содержит схему счетчика, компаратор, фильтр управления нижних частот, D/A преобразователь, управляемый напряжением осциллятор и схему деления частоты, и
при этом этап генерации основного колебания внутреннего тактового сигнала включает в себя подсчет, посредством схемы счетчика, количества тактовых импульсов, генерируемых в управляемом напряжением осцилляторе, с использованием сигнального входа из передаваемой волны в качестве опорного сигнала, и компаратор действует для сравнения отсчитанного значения с опорным значением, и когда отношение величин в качестве результата сравнения в компараторе совпадает с предопределенным значением и продолжается предопределенное количество раз в одном направлении, настройку управляемым образом уровня управляющего напряжения управляемого напряжением осциллятора.
9. Способ по п.8, в котором, когда отношение величин как результат сравнения в компараторе превышает предопределенное значение, отсчитываемое значение управляемым образом отбрасывается.
10. Способ по п.9, в котором, когда отношение величин как результат сравнения в компараторе превышает предопределенное значение и значение, превышающее предопределенное значение, продолжается предопределенное количество раз в пределах предопределенного временного периода, значение в качестве постоянной времени управляемым образом изменяется.
| US 2009002230 A1, 01.01.2009 | |||
| US 2007086511 A1, 19.04.2007 | |||
| US 2004130484 A1, 08.07.2004 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| RU 2008116582 A, 10.11.2009 | |||
| RU 2008143353 A, 10.05.2010 | |||

