ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к системе магнитно-резонансного обследования, которая включает в себя функцию для идентификации имплантированного инструмента в объекте, подлежащем обследованию. Является, в общем, известным, что имплантаты, например в виде имплантированных медицинских устройств, таких как кардиостимуляторы или нейростимуляторы, могут вызывать опасные ситуации в системе магнитно-резонансного обследования. Такая система магнитно-резонансного обследования известна из 'Detecting unsafe device coupling using reversed polarization', ISMRM 2009, реферат, 306.
УРОВЕНЬ ТЕХНИКИ
Известная система магнитно-резонансного обследования содержит катушку "птичья клетка" с 32 кольцами, которая применяет так называемую обратную поляризацию, в которой РЧ (радиочастотное) поле с правой круговой поляризацией используется для передачи и РЧ поле c левой круговой поляризацией используется для приема. Когда провод с электромагнитной связью присутствует в поле обзора катушки "птичья клетка", провод генерирует вторичное линейно поляризованное поле, пропорциональное току через провод. Прямо поляризованный компонент этого наведенного линейно поляризованного поля вырабатывает локализованный магнитно-резонансный сигнал, пропорциональный его электромагнитной связи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей изобретения является обеспечение системы магнитно-резонансного обследования с безопасным обнаружением инструмента, такой что требуется только незначительная модификация системы магнитно-резонансного обследования.
Эта задача решается согласно изобретению посредством системы магнитно-резонансного обследования, содержащей РЧ систему, чтобы генерировать РЧ поле передачи,
- градиентную систему, чтобы генерировать временные магнитные градиентные поля,
- модуль управления, включающий в себя контроллер последовательностей, чтобы управлять РЧ системой и градиентной системой, чтобы вырабатывать последовательности получения, включающие в себя РЧ импульсы и магнитные градиентные импульсы, чтобы генерировать магнитно-резонансные сигналы, при этом
- контроллер последовательностей сконфигурирован с возможностью производить сканирование в режиме обнаружения, включающее в себя последовательность получения градиентного эхоустойчивого состояния, чтобы генерировать сигналы градиентного эхоустойчивого состояния, и последовательность получения эхо с РЧ очищением, чтобы вырабатывать сигналы эхо с РЧ очищением,
- модуль управления дополнительно включает в себя блок анализа,
- чтобы сравнивать сигналы градиентного эхо с сигналами эхо с РЧ очищением, и
- для обнаружения инструмента в объекте из сравнения градиентных эхо и эхо с РЧ очищением.
Суть настоящего изобретения состоит в том, что различия между откликами последовательности получения градиентного эхо и последовательности получения градиентного эхо с РЧ очищением являются точными и чувствительными индикаторами для непредсказуемой РЧ связи РЧ полей с инструментом. Инструмент является, например, имплантированным инструментом (имплантатом) в теле пациента. Обнаружение такого имплантированного инструмента влечет за собой установление фактического присутствия инструмента в теле пациента. Другой пример инструмента является интервенционным инструментом, таким как катетер или эндоскоп, который вставлен в тело пациента. На основе РЧ связи интервенционного инструмента с РЧ полями положение интервенционного инструмента может отслеживаться. То есть в примере интервенционного инструмента обнаружение влечет за собой обнаружение его присутствия и индикацию его положения по мере того, как интервенционный инструмент перемещается внутри тела пациента. Изобретение не требует адаптаций аппаратного обеспечения к системе магнитно-резонансного обследования. Обнаружение согласно изобретению имеет почти нулевой фон при 1,5 Тл и на 3,0 Тл в большей части брюшной полости. Следует отметить, что фоновое подавление при 3,0 Тл является заметно лучшим, нежели то, что достигается посредством известной системы магнитно-резонансного обследования на основе обратно поляризованных или антиквадратурных РЧ полей. Также, способ обнаружения согласно изобретению применяет очень низкие B1, среднеквадратичное значение B1 и значения скорости поворота градиента, чтобы предотвращать опасные взаимодействия между потенциально присутствующим устройством и тканью тела; таким образом, он является по своему существу безопасным.
Эти и другие аспекты изобретения будут дополнительно конкретизироваться со ссылкой на варианты осуществления, определенные в зависимых пунктах формулы изобретения.
В предпочтительном варианте осуществления системы магнитно-резонансного обследования изобретения сканирование в режиме обнаружения включается в сканирование в режиме пространственного обследования низкого разрешения. Такое сканирование в режиме обследования часто делается, чтобы регулировать несколько настроек системы магнитно-резонансного обследования для конкретного объекта, то есть пациента, подлежащего обследованию. Сканирование в режиме обнаружения предпочтительно проектируется с возможностью иметь область чувствительности, которая охватывает пространство доступа пациента системы магнитно-резонансного обследования. Область чувствительности является областью, из которой сканирование в режиме обнаружения генерирует магнитно-резонансные сигналы с ощутимой амплитудой сигнала или отношением сигнала к шуму, которое обеспечивает возможность обнаруживать или отслеживать инструмент. Пространство доступа пациента является областью в системе магнитно-резонансного обследования, которая является доступной для пациента. Следует отметить, что зона обследования, т.е. область, где главное магнитное поле и градиентные магнитные поля являются пространственно однородными до такой степени, что могут делаться магнитно-резонансные изображения диагностического качества, включается в пространство доступа пациента. Сканирование в режиме обнаружения способно охватывать пространство доступа пациента, например, посредством настройки области чувствительности сканирования в режиме обнаружения, чтобы она была 500-600 мм3. В другом варианте осуществления область чувствительности сканирования обнаружения проходит до большей части области внутри 0,5 мТл контура системы магнитно-резонансного обследования. Следует отметить, что поле обзора сканирования в режиме обнаружения захватывает область внутри 0,5 мТл контура на стороне системы магнитно-резонансного обследования, откуда пациент перемещается в зону обследования. Например, область чувствительности сканирования в режиме обнаружения может устанавливаться как поле обзора сканирования в режиме обнаружения, как определяется посредством выборки k-пространства последовательностей получения сканирования в режиме обнаружения. Однако область чувствительности может быть более большой, чем поле обзора в случае, когда низкий уровень артефактов заворота может быть приемлемым в обнаружении инструмента. Сканирование в режиме обследования также может применяться, чтобы получать профили пространственной чувствительности приема антенн РЧ приемника (катушек) РЧ системы. Эти профили пространственной чувствительности применяются в методиках параллельного формирования изображений, таких как SENSE, чтобы разворачивать наложения вследствие субдискретизации. Это сканирование в режиме обследования, в общем, проектируется с возможностью работать с очень низкой конкретной скоростью поглощения (SAR) и низкой стимуляцией периферических нервов (PNS). Это обеспечивает возможность безопасного обнаружения потенциально опасных имплантатов. Применение низких B1, среднеквадратичного значения B1 и скоростей поворота предотвращает потенциальное локальное нагревание ткани или вибрации от такого потенциально небезопасного имплантата. Более того, сканирование в режиме обследования не включает в себя много РЧ импульсов РЧ возбуждения и перефокусировки и включает в себя только импульсы градиентного магнитного поля низкой скорости поворота. Таким образом, сканирование в режиме обследования с одной стороны может включать в себя сканирование в режиме обнаружения, чтобы оценивать пациента, подлежащего обследованию, в отношении каких-либо имплантатов, и с другой стороны, в общем, сканирование в режиме обследования не вызывает опасных ситуаций в случае, когда сканируется пациент с имплантатом.
В дополнительном аспекте изобретения, сканирование в режиме обнаружения включает в себя сравнение двойного уровня сигнала градиентного эхо и уровня сигнала эхо с РЧ очищением, или уровня сигнала эхо с РЧ очищением при заранее заданном угле отклонения и сигнала эхо с РЧ очищением при двойном заранее заданном угле отклонения, или уровнем сигнала эхо с РЧ очищением и уровнем сигнала градиентного эхо при угле отклонения, равном углу Эрнста. Следует отметить, что при низком угле отклонения повторных РЧ импульсов перефокусировки обоих градиентного эхо устойчивого состояния и сигналов эхо с РЧ очищением, эти альтернативы вырабатывают минимальный сигнал в случае, когда не имеется электромагнитной связи с имплантатом, т.е. при номинальном угле отклонения. Хорошие результаты достигаются с углом отклонения меньшим, чем 10°. Таким образом, эти альтернативы, каждая, вырабатывают низкий фоновый сигнал, если никакой имплантат не присутствует, или в областях, где не имеется никакого интервенционного инструмента, так что эти альтернативы обеспечивают высокочувствительное обнаружение имплантата или отслеживание инструмента, когда угол отклонения увеличивается посредством РЧ связи.
Особенно подходящими последовательностями получения для сканирования в режиме обнаружения являются последовательности T1-FFE и FFE.
Изобретение дополнительно относится к способу обнаружения имплантата, как определяется в пункте 4 формулы. Способ по изобретению достигает безопасного обнаружения имплантата в пациенте, подлежащем обследованию, без необходимости обширной модификации стандартной системы магнитно-резонансного обследования. Следует отметить, что способ по изобретению достигает технического результата, переносит ли пациент, подлежащий обследованию, имплантат и, поэтому, может не быть безопасным для обследования с использованием магнитно-резонансной томографии.
Изобретение дополнительно относится к компьютерной программе, как определяется в пункте 5 формулы. Компьютерная программа по изобретению может обеспечиваться на носителе данных, таком как диск CD-rom или карта памяти USB, или компьютерная программа по изобретению может загружаться из сети данных, такой как всемирная паутина. Когда установлена на компьютере, содержащемся в системе магнитно-резонансной томографии, система магнитно-резонансной томографии может работать согласно изобретению и достигать безопасного обнаружения имплантата в пациенте, подлежащем обследованию, без необходимости обширной модификации стандартной системы магнитно-резонансного обследования.
Эти и другие аспекты изобретения будут описываться со ссылкой на варианты осуществления, описанные ниже, и со ссылкой на сопровождающие чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
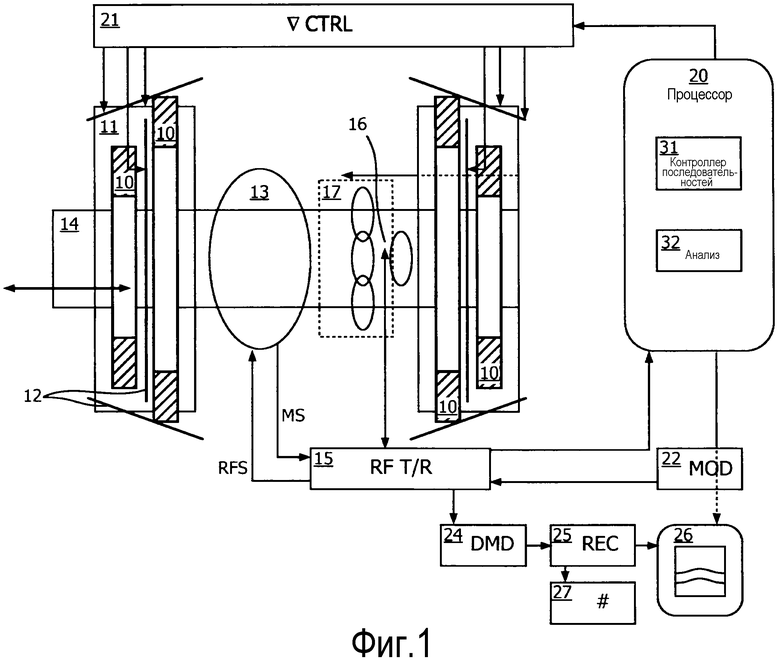
Фиг.1 показывает схему системы магнитно-резонансной томографии, в которой используется изобретение.
Фиг.2 показывает моделирование сигналов разности из последовательностей получения градиентного эхо с и без РЧ очищения в диапазоне углов отклонения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг.1 показывает схему системы магнитно-резонансной томографии, в которой используется изобретение. Система магнитно-резонансной томографии включает в себя набор главных катушек 10, посредством которых генерируется устойчивое, однородное магнитное поле. Главные катушки конструируются, например, таким образом, что они окружают пространство обследования в форме туннеля. Пациент, подлежащий обследованию, помещается на держатель пациента, который скользит в это пространство обследования в форме туннеля. Система магнитно-резонансной томографии также включает в себя некоторое количество градиентных катушек 11, 12, посредством которых магнитные поля, проявляющие пространственные изменения, особенно в виде временных градиентов в индивидуальных направлениях, генерируются так, чтобы накладываться на однородное магнитное поле. Градиентные катушки 11, 12 соединяются с модулем 21 градиентного управления, который включает в себя один или более градиентный усилитель и управляемый блок источника питания. Градиентные катушки 11, 12 питаются энергией посредством приложения электрического тока посредством блока 21 источника питания; с этой целью блок источника питания оборудуется электронной схемой градиентного усиления, которая применяет электрический ток к градиентным катушкам так, чтобы генерировать градиентные импульсы (также называемые 'градиентные колебания') соответствующей временной формы. Сила, направление и продолжительность градиентов управляются посредством управления блока источника питания. РЧ система системы магнитно-резонансной томографии включает в себя катушки 13, 16 передачи и приема для генерирования РЧ импульсов возбуждения и для сбора магнитно-резонансных сигналов, соответственно. Катушка 13 передачи предпочтительно конструируется как катушка 13 для тела, посредством которой объект (его часть), подлежащий обследованию, может окружаться. Катушка для тела обычно размещается в системе магнитно-резонансной томографии таким образом, что пациент 30, подлежащий обследованию, окружается посредством катушки 13 для тела, когда он или она размещается в системе магнитно-резонансной томографии. Катушка 13 для тела действует как антенна передачи для передачи РЧ импульсов возбуждения и РЧ импульсов перефокусировки. Предпочтительно, катушка 13 для тела содержит пространственно однородное распределение интенсивности переданных РЧ импульсов (RFS). Одна и та же катушка или антенна обычно используется альтернативно как катушка передачи и катушка приема. Дополнительно, катушка передачи и приема обычно имеет форму катушки, но другие геометрические формы, где катушка передачи и приема действует как антенна передачи и приема для электромагнитных РЧ сигналов, являются также реализуемыми. Катушка 13 передачи и приема соединяется с электронной схемой 15 передачи и приема.
Следует отметить, что является альтернативно возможным использовать отдельные катушки 16 приема и/или передачи. Например, поверхностные катушки 16 могут использоваться как катушки приема и/или передачи. Такие поверхностные катушки имеют высокую чувствительность в сравнительно маленьком объеме. Демодулятор обеспечивается в РЧ системе. Катушки приема, такие как поверхностные катушки, соединяются с демодулятором 24 и принятые магнитно-резонансные сигналы (MS) демодулируются посредством демодулятора 24. Демодулированные магнитно-резонансные сигналы (DMS) подаются в блок восстановления. Катушка приема соединяется с предусилителем 23. Предусилитель 23 усиливает РЧ резонансный сигнал (MS), принятый посредством катушки 16 приема, и усиленный РЧ резонансный сигнал подается в демодулятор 24. Демодулятор 24 демодулирует усиленный РЧ резонансный сигнал. Демодулированный резонансный сигнал содержит фактическую информацию, касающуюся локальных спиновых плотностей в части объекта, для которого должно формироваться изображение. Дополнительно, РЧ система включает в себя модулятор 22, и схема 15 передачи и приема соединяется с модулятором 22. Модулятор 22 и схема 15 передачи и приема активируют катушку 13 передачи так, чтобы передавать РЧ импульсы возбуждения и перефокусировки. Данные магнитно-резонансного сигнала, принятые посредством поверхностных катушек 16, передаются в схему 15 передачи и приема и сигналы управления (например, чтобы настраивать и расстраивать поверхностные катушки) посылаются в поверхностные катушки посредством модуля 20 управления.
Блок восстановления выводит один или более сигналов изображения из демодулированных магнитно-резонансных сигналов (DMS), при этом сигналы изображения представляют информацию изображения части объекта, подлежащего обследованию, для которой формировалось изображение. Блок 25 восстановления на практике конструируется предпочтительно как блок 25 цифровой обработки изображений, который программируется так, чтобы выводить из демодулированных магнитно-резонансных сигналов сигналы изображения, которые представляют информацию изображения части объекта, для которого должно формироваться изображение. Сигнал на выводе монитора 26 восстановления, так что монитор может отображать магнитно-резонансное изображение. Возможно, в качестве альтернативы, хранить сигнал из блока 25 восстановления в блоке 27 буфера при ожидании дополнительной обработки.
Система магнитно-резонансной томографии согласно изобретению также обеспечивается модулем 20 управления, например, в виде компьютера, который включает в себя (микро)процессор. Модуль 20 управления осуществляет управление, посредством контроллера 31 последовательностей, исполнения РЧ возбуждений и применения временных градиентных полей. Следует отметить, что модуль управления конфигурируется или программируется с возможностью выполнять сканирование в режиме обнаружения, которое выполняется, чтобы идентифицировать имплантат, или чтобы отслеживать интервенционный инструмент. С этой целью, компьютерная программа согласно изобретению загружается, например, в блок 20 управления и блок 25 восстановления. Дополнительно, модуль управления обеспечивается блоком 32 анализа. Блок 32 анализа включает в себя арифметическую функцию, которая сравнивает сигналы градиентного эхо с сигналами эхо с РЧ очищением, особенно, которые генерируются в сканировании в режиме обнаружения. Блок 32 анализа сравнивает уровни сигналов градиентного эхо устойчивого состояния и градиентного эхо с РЧ очищением. Согласно одному варианту осуществления, фактическое присутствие имплантата обнаруживается на основе сравнения сигналов разности от объема формирования изображений, и сигнал обнаружения (IS) подается в монитор 26, так чтобы обеспечивать индикацию идентифицированного имплантата для оператора. Является также возможным, что оператор обозревает представленные данные изображения для усилений сигнала. Альтернативно, сигнал обнаружения (IS) может представлять положение, например, наконечника интервенционного инструмента. На основе сигнала обнаружения фактическое положение интервенционного инструмента может показываться в магнитно-резонансном изображении.
Согласно изобретению, потенциально опасный имплантат обнаруживается или интервенционный инструмент отслеживается на основе вычитания сигналов градиентного эхоустойчивого состояния и градиентного эхо с РЧ очищением. Более конкретно, применяется различие между сигналами и из последовательности FFE, и T1-FFE последовательности. Для короткого TE/TR интенсивность сигнала с РЧ очищением равняется:
и интенсивность сигнала устойчивого состояния равняется:
где 
 и
и  . Спиновая плотность обозначается посредством
. Спиновая плотность обозначается посредством  , и
, и  является углом отклонения. Для низких значений угла отклонения эти интенсивности сигнала в удовлетворительном приближении:
является углом отклонения. Для низких значений угла отклонения эти интенсивности сигнала в удовлетворительном приближении:
 . Чтобы сравнивать эти сигналы и достигать низкого уровня фонового сигнала, когда никакой имплантат не присутствует, или в области, где не имеется никакого интервенционного инструмента, следующие альтернативы являются доступными:
. Чтобы сравнивать эти сигналы и достигать низкого уровня фонового сигнала, когда никакой имплантат не присутствует, или в области, где не имеется никакого интервенционного инструмента, следующие альтернативы являются доступными:

Фиг. 2 показывает результаты моделирования угла отклонения сравнений между последовательностями получения градиентного эхо с и без РЧ очищения. Разность  показывает достаточное приблизительно тройное увеличение, когда сравнивается для низкого угла отклонения
показывает достаточное приблизительно тройное увеличение, когда сравнивается для низкого угла отклонения  . Однако следует отметить, что моделирование показывает, что разность
. Однако следует отметить, что моделирование показывает, что разность  уменьшается для очень больших углов отклонения в диапазоне
уменьшается для очень больших углов отклонения в диапазоне  . Таким образом, обнаруженное различие вырождается в том, что оно может приписываться умеренному увеличению угла отклонения вследствие РЧ связи или очень большому увеличению угла отклонения вследствие очень сильной РЧ связи. Следует отметить, что разность
. Таким образом, обнаруженное различие вырождается в том, что оно может приписываться умеренному увеличению угла отклонения вследствие РЧ связи или очень большому увеличению угла отклонения вследствие очень сильной РЧ связи. Следует отметить, что разность  является полезной в ситуациях, где очень сильная РЧ связь исключается, например, для отслеживания интервенционного инструмента, такого как катетер. Дополнительно, в диапазоне умеренного, приблизительно тройного, увеличения увеличение не является сильно зависящим от отношения
является полезной в ситуациях, где очень сильная РЧ связь исключается, например, для отслеживания интервенционного инструмента, такого как катетер. Дополнительно, в диапазоне умеренного, приблизительно тройного, увеличения увеличение не является сильно зависящим от отношения  , особенно для T1>600мс, так что на приблизительно тройное увеличение, вызванное РЧ связью, не сильно воздействует тип окружающей ткани.
, особенно для T1>600мс, так что на приблизительно тройное увеличение, вызванное РЧ связью, не сильно воздействует тип окружающей ткани.
Для низких значений угла отклонения, в самом деле,  , по меньшей мере, для длинного
, по меньшей мере, для длинного  стремится к нулевому значению для
стремится к нулевому значению для  , когда не имеется никакого РЧ резонанса, т.е. в отсутствие имплантата. Однако для короткого
, когда не имеется никакого РЧ резонанса, т.е. в отсутствие имплантата. Однако для короткого  , разность
, разность  показывает невырожденное увеличение вплоть до углов отклонения вплоть до приблизительно 10°. Соответственно разность
показывает невырожденное увеличение вплоть до углов отклонения вплоть до приблизительно 10°. Соответственно разность  является подходящей, чтобы обнаруживать имплантаты или отслеживать интервенционный инструмент с высокой чувствительностью с использованием углов отклонения вплоть до
является подходящей, чтобы обнаруживать имплантаты или отслеживать интервенционный инструмент с высокой чувствительностью с использованием углов отклонения вплоть до  ; очень хорошая невырожденная чувствительность достигается для умеренных углов отклонения в диапазоне
; очень хорошая невырожденная чувствительность достигается для умеренных углов отклонения в диапазоне  .
.
Разность  является нулевой при угле Эрнста, так что рядом с углом Эрнста эта разность имеет низкую мощность, чтобы различать присутствие имплантата, который генерирует РЧ связь. Все же разность
является нулевой при угле Эрнста, так что рядом с углом Эрнста эта разность имеет низкую мощность, чтобы различать присутствие имплантата, который генерирует РЧ связь. Все же разность  имеет умеренное приблизительно тройное увеличение в диапазоне углов отклонения, более больших, чем угол Эрнста. Более того, увеличение так же, как угол Эрнста, являются зависящими от отношения
имеет умеренное приблизительно тройное увеличение в диапазоне углов отклонения, более больших, чем угол Эрнста. Более того, увеличение так же, как угол Эрнста, являются зависящими от отношения  , т.е. умеренное увеличение является зависящим от типа ткани. Таким образом, разность
, т.е. умеренное увеличение является зависящим от типа ткани. Таким образом, разность  является тем не менее полезной индикацией присутствия имплантата, когда окружающая ткань является априори известной. Например, разность
является тем не менее полезной индикацией присутствия имплантата, когда окружающая ткань является априори известной. Например, разность  является полезной для обнаружения имплантата в мозге пациента или для отслеживания инвазивного устройства, такого как биопсийная игла в мозге пациента.
является полезной для обнаружения имплантата в мозге пациента или для отслеживания инвазивного устройства, такого как биопсийная игла в мозге пациента.
Разность  является монотонно возрастающей с углом отклонения. То есть разность
является монотонно возрастающей с углом отклонения. То есть разность  показывает сильное увеличение, когда угол отклонения увеличивается вследствие РЧ связи, в то время как разность является маленькой для низкого угла отклонения, т.е. когда не имеется никакой РЧ связи. Например, моделирования показывают, что разность
показывает сильное увеличение, когда угол отклонения увеличивается вследствие РЧ связи, в то время как разность является маленькой для низкого угла отклонения, т.е. когда не имеется никакой РЧ связи. Например, моделирования показывают, что разность  показывает увеличение приблизительно на порядок величины относительно разности при
показывает увеличение приблизительно на порядок величины относительно разности при  . Соответственно разность
. Соответственно разность  является высоко чувствительной для РЧ связи вследствие присутствия инструмента, такого как имплантат. Дополнительно, разность
является высоко чувствительной для РЧ связи вследствие присутствия инструмента, такого как имплантат. Дополнительно, разность  эффективно обнуляет различия сигнала между FFE и T1FFE для коротких TR, низкого угла отклонения и широкого диапазона
эффективно обнуляет различия сигнала между FFE и T1FFE для коротких TR, низкого угла отклонения и широкого диапазона  . Таким образом, разность
. Таким образом, разность  является подходящей для обнаружения или отслеживания инструмента независимо от типа окружающей ткани.
является подходящей для обнаружения или отслеживания инструмента независимо от типа окружающей ткани.
Использование: для магнитно-резонансного обследования. Сущность изобретения заключается в том, что система магнитно-резонансного обследования для обследования объекта содержит РЧ систему, чтобы генерировать РЧ поле передачи, и градиентную систему, чтобы генерировать временные магнитные градиентные поля. Модуль управления включает в себя контроллер последовательностей, чтобы управлять РЧ системой и градиентной системой, чтобы вырабатывать последовательности получения, включающие в себя РЧ импульсы и магнитные градиентные импульсы, чтобы генерировать магнитно-резонансные сигналы. Контроллер последовательности сконфигурирован с возможностью производить сканирование в режиме обнаружения, включающее в себя последовательность получения градиентного эхоустойчивого состояния, чтобы генерировать сигналы градиентного эхоустойчивого состояния, и последовательность получения эхо с РЧ очищением, чтобы вырабатывать сигналы эхо с РЧ очищением. Модуль управления дополнительно включает в себя блок анализа, чтобы сравнивать сигналы градиентного эхо с сигналами эхо с РЧ очищением и для обнаружения инструмента в объекте из сравнения градиентных эхо и эхо с РЧ очищением. Технический результат: обеспечение возможности достоверного обнаружения или отслеживания инструмента независимо от типа окружающей ткани. 3 н. и 2 з.п. ф-лы, 2 ил.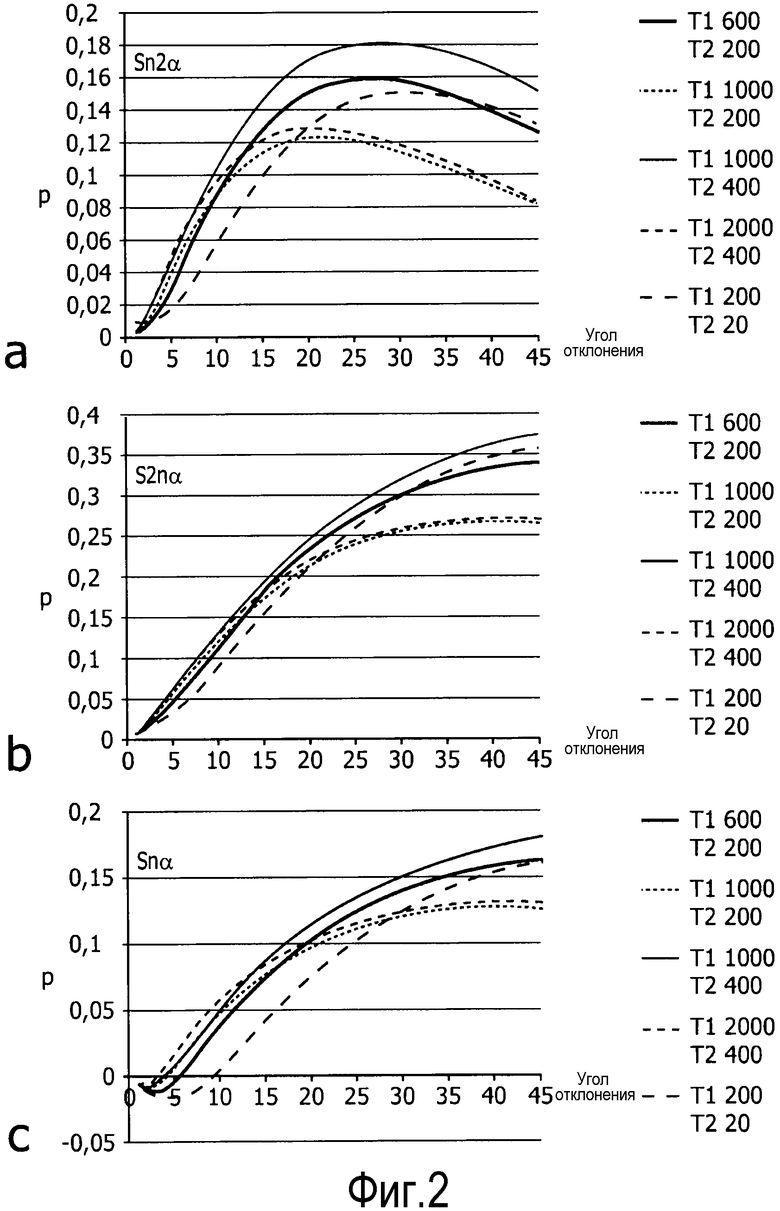
1. Система магнитно-резонансного обследования для обследования объекта, содержащая:
- РЧ систему (13, 16), чтобы генерировать РЧ поле передачи в пространстве обследования, сконфигурированном с возможностью принимать объект, подлежащий обследованию,
- градиентную систему (11, 12, 21), чтобы генерировать временные магнитные градиентные поля в пространстве обследования,
- модуль (20) управления, включающий в себя контроллер (31) последовательностей, при этом контроллер последовательностей управляет РЧ системой и градиентной системой, чтобы вырабатывать РЧ импульсы и магнитные градиентные импульсы, чтобы генерировать магнитно-резонансные сигналы, при этом
- контроллер последовательностей сконфигурирован с возможностью применять последовательность получения градиентного эхо FFE устойчивого состояния к объекту в пространстве обследования, чтобы вырабатывать сигналы градиентного эхо FFE устойчивого состояния из объекта, и последовательность получения эхо T1-FFE к объекту в пространстве обследования, чтобы вырабатывать сигналы эхо T1-FFE из объекта,
модуль управления дополнительно включает в себя блок (32) анализа, сконфигурированный с возможностью обнаруживать различие в сигналах градиентного эхо FFE и сигналах эхо T1-FFE и
определять, присутствует ли металлический инструмент в объекте по различию в сигналах градиентного эхо FFE и сигналах эхо T1-FFE.
2. Система магнитно-резонансного обследования по п. 1, в которой последовательность получения FFE и последовательность получения T1-FFE применяются в магнитно-резонансном сканировании с углом отклонения ниже 10°.
3. Система магнитно-резонансного обследования по любому одному из пп. 1 и 2, в которой блок анализа сконфигурирован с возможностью вычитать одно из:
двойного сигнала градиентного эхо FFE из сигнала эхо T1-FFE, либо
сигнал эхо T1-FFE, сгенерированный при заранее заданном угле отклонения, и сигнал эхо T1-FFE, сгенерированный при двойном заранее заданном угле отклонения, или
сигнал эхо T1-FFE и сигнал градиентного эхо FFE, полученные при угле отклонения, равном углу Эрнста.
4. Способ обследования объекта, при этом способ включает в себя этапы, на которых:
применяют последовательность получения градиентного эхо FFE устойчивого состояния к объекту в пространстве обследования, чтобы вырабатывать сигналы градиентного эхо FFE устойчивого состояния из объекта,
применяют последовательность получения эхо T1-FFE к объекту в пространстве обследования, чтобы вырабатывать сигналы эхо T1-FFE из объекта,
обнаруживают различие в сигналах градиентного эхо FFE и сигналах эхо T1-FFE, и
обнаруживают, присутствует ли металлический объект в объекте из различия в сигналах градиентного эхо FFE и сигналах эхо T1-FFE.
5. Носитель данных, содержащий компьютерную программу, включающую в себя инструкции, чтобы
применять последовательность получения градиентного эхо FFE устойчивого состояния к объекту в пространстве обследования, чтобы вырабатывать сигналы градиентного эхо FFE устойчивого состояния из объекта,
применять последовательность получения эхо T1-FFE к объекту в пространстве обследования, чтобы вырабатывать сигналы эхо T1-FFE из объекта,
обнаруживать различие в сигналах градиентного эхо FFE и сигналах эхо T1-FFE, и
обнаруживать, присутствует ли металлический объект в объекте из различия в сигналах градиентного эхо FFE и сигналах T1-FFE.
| WO 2009081379A2, 02.07.2009 | |||
| US 20070247148A1, 25.10.2007 | |||
| US 7254437B2, 07.08.2007 | |||
| US 20080064951A1, 13.03.2008 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИСПОЛЬЗОВАНИЯ ЯДЕРНО-МАГНИТНЫХ РЕЗОНАНСНЫХ ИЗМЕРЕНИЙ С ГРАДИЕНТАМИ ИМПУЛЬСНОГО ПОЛЯ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ФЛЮИДОВ В СКВАЖИННОМ КАРОТАЖНОМ ПРИБОРЕ ДЛЯ ОТБОРА ПРОБ ФЛЮИДОВ | 2005 |
|
RU2377609C2 |
| RU 2008102642A, 27.07.2009 | |||

