Область техники
Настоящее изобретение относится к прямому цифровому приемнику, аппарату магнитно-резонансной томографии, содержащему радиочастотную катушку и прямой цифровой приемник, способу предоставления радиочастотного сигнала радиочастотной катушки, а также к компьютерному программному продукту.
Способы формирования изображений с помощью магнитного резонанса (MR), которые используют взаимодействие между магнитными полями и ядерными спинами для того, чтобы формировать двухмерные или трехмерные изображения, широко используются в наши дни, в частности, в области медицинской диагностики, потому что для формирования изображения мягких тканей они лучше других способов формирования изображений во многих отношениях, не требуют ионизирующего излучения и обычно не являются инвазивными.
Согласно MR-способу в целом тело пациента, который должен быть исследован, размещается в сильном, однородном магнитном поле, чье направление в то же время определяет ось (обычно z-ось) системы координат, на которой основывается измерение. Магнитное поле создает различные энергетические уровни для отдельных ядерных спинов в зависимости от силы магнитного поля, которая может быть вызвана (спиновый резонанс) применением электромагнитного переменного поля (RF-поля) определенной частоты (так называемой ларморовой частоты или MR-частоты). С макроскопической точки зрения распределение отдельных ядерных спинов создает общую намагниченность, которая может отклоняться от состояния равновесия посредством приложения электромагнитного импульса подходящей частоты (радиочастотного (RF) импульса), в то время как магнитное поле проходит перпендикулярно z-оси (также называемой продольной осью), так что намагниченность выполняет прецессионное движение вокруг z-оси. Прецессионное движение описывает поверхность конуса, угол апертуры которого называется углом поворота. Величина угла поворота зависит от силы и продолжительности приложенного электромагнитного импульса. В случае так называемого 90° импульса, спины отклоняются от z-оси в поперечную плоскость (угол поворота 90°).
После окончания RF-импульса намагниченность уменьшается до первоначального состояния равновесия, в котором намагниченность в z-направлении создается опять с первой временной константой T1 (время спин-решеточной или продольной релаксации), а намагниченность в направлении, перпендикулярном z-направлению, уменьшается со второй временной константой T2 (время спин-спиновой или поперечной релаксации). Изменение намагниченности может быть детектировано посредством принимающих радиочастотных (RF) катушек, которые размещаются и ориентируются в пространстве исследования MR-устройства таким образом, что изменение намагниченности измеряется в направлении, перпендикулярном z-оси. Уменьшение поперечной намагниченности сопровождается, после приложения, например, 90° импульса, переходом ядерных спинов (возбужденных локальными неоднородностями магнитного поля) из упорядоченного состояния с одинаковой фазой в состояние, в котором все фазовые углы однообразно распределены (дефазировка). Дефазировка может быть компенсирована посредством рефокусирующего импульса (например, 180° импульса). Это создает эхо-сигнал (спиновое эхо) в принимающих катушках.
Для того, чтобы реализовать пространственное разрешение в теле, линейные градиенты магнитного поля, проходящие вдоль трех основных осей, накладываются на однородное магнитное поле, приводя к линейной пространственной зависимости частоты спинового резонанса. Сигнал, снятый в принимающих катушках, тогда содержит составляющие различных частот, которые могут быть ассоциированы с различными местоположениями в теле. Данные сигнала, полученные через принимающие катушки, соответствуют пространственной частотной области и называются данными k-пространства. Данные k-пространства обычно включают в себя множество линий, полученных с помощью различного фазового кодирования. Каждая линия оцифровывается посредством сбора множества дискретных значений. Набор данных k-пространства преобразуется в MR-изображение посредством преобразования Фурье.
Для того, чтобы обрабатывать сигнал, снятый в принимающих катушках, для последующей визуализации через MR-изображение, сигнал типично должен быть усилен, отфильтрован и оцифрован. Как правило, прямой цифровой приемник (DDR), содержащий аналого-цифровой преобразователь (ADC), который дискретизирует MR-сигнал напрямую без использования промежуточной частоты и последующего цифрового понижающего преобразователя, используется, чтобы преобразовывать аналоговый (магниторезонансный) MR-сигнал в цифровой сигнал основной полосы частот. Замена передачи всего аналогового радиочастотного (RF) сигнала передачей цифрового радиочастотного сигнала в модулях RF-катушек уменьшает физический объем аналоговых RF-компонентов, требуемых для приема MR-сигнала. Это позволяет упростить схему радиочастотной катушки и предоставляет возможности стандартизировать компоненты узла катушки.
Предшествующий уровень техники
WO 2008/075268 A1 раскрывает прямой цифровой приемник для радиочастотной катушки, в частности, системы магнитно-резонансной томографии. Чтобы добиться того, что частота дискретизации аналого-цифрового преобразователя цифрового приемника может быть выбрана независимо от частоты цифровой обработки, с которой последующий цифровой понижающий преобразователь работает, вводится модуль повторной дискретизации, который подключается между аналого-цифровым преобразователем и цифровым понижающим преобразователем.
Однако прямой цифровой приемник (DDR) повторной дискретизации все еще требует, чтобы частота дискретизации аналого-цифрового преобразователя (ADC) оставалась на частоте, синхронизированной с системным тактовым сигналом, используемым, чтобы управлять критичными по времени цифровыми функциями системы.
Синхронизация частоты по тактовому сигналу ADC имеет два недостатка: Во-первых, она требует, чтобы системный тактовый сигнал распространялся на ADC. Это ограничение ограничивает местоположения ADC и связанного с ним генератора тактовых импульсов местоположениями, где присутствует системный тактовый сигнал. Во-вторых, получение частоты дискретизации ADC из восстановленного системного тактового сигнала по определению привносит шум, присутствующий в системном тактовом сигнале, в тактовый сигнал ADC. Точность системного тактового сигнала трудно поддерживать, поскольку он типично проходит через различные цифровые электронные узлы.
Краткое изложение существа изобретения
Из вышесказанного совершенно понятно, что существует необходимость в улучшенном прямом цифровом приемнике. Следовательно, задачей изобретения является предоставление прямого цифрового приемника с уменьшенной сложностью компонентов.
В соответствии с изобретением раскрывается прямой цифровой приемник для радиочастотной катушки, в частности, системы магнитно-резонансной томографии, для предоставления цифрового дискретного выходного сигнала с частотой цифровой обработки во временной основе системного тактового сигнала. Приемник содержит аналого-цифровой преобразователь для преобразования аналогового сигнала, принятого от радиочастотной катушки, в цифровой дискретный входной сигнал, в котором аналого-цифровой преобразователь управляется локальным тактовым сигналом. Дополнительно, приемник содержит локальный тактовый генератор, приспособленный для предоставления локального тактового сигнала во временной основе локального тактового сигнала аналого-цифровому преобразователю, при этом временная основа локального тактового сигнала не зависит от временной основы системного тактового сигнала. Дополнительно, приемник содержит фазовый детектор, приспособленный для определения разности фаз между системным тактовым сигналом и локальным тактовым сигналом, а также модуль повторной дискретизации, приспособленный для повторной дискретизации цифрового дискретного входного сигнала в цифровой дискретный выходной сигнал с помощью упомянутой разности фаз.
Это имеет преимущество в том, что системный тактовый сигнал не должен больше распространяться на ADC. Это повышает свободу конструирования относительно местоположений ADC и ассоциированного тактового генератора, поскольку для управления ADC системный тактовый сигнал больше не требуется.
Предпочтительно, локальный тактовый генератор является кварцевым генератором, который имеет дополнительное преимущество в том, что управление по напряжению больше не требуется на генераторе, тогда как в предшествующем уровне техники требовался кварцевый генератор (VCXO) с управлением по напряжению приемника, чтобы регулировать частоту тактового сигнала ADC в зависимости от разности фаз между системным тактовым сигналом и тактовым сигналом ADC.
Используя независимый тактовый сигнал ADC, т.е., временную основу локального (ADC) тактового сигнала, независимую от временной основы системного тактового сигнала, ограничения, касающиеся местоположения ADC относительно компонентов, требующих синхронизации с системным тактовым сигналом, могут быть преодолены. Это допускает альтернативную реализацию топологий, в которых аналоговые компоненты могут быть дополнительно локализованы и уменьшены по размеру. В частности, это позволяет узлам принимающих RF-катушек, типично состоящим из платы элементов катушки (CEB) и модуля цифрового приемника (RXE), быть реализованными с помощью одного типа аналогового подузла и передачи полностью цифрового сигнала оптическими средствами, полностью устраняя взаимодействия поля RF-передачи с кабелями для передачи радиочастотного сигнала.
В соответствии с вариантом осуществления изобретения аналого-цифровой преобразователь, локальный тактовый генератор и дополнительные электронные аналоговые приемные компоненты радиочастотной катушки содержатся на плате элементов катушки (CEB). Электронными аналоговыми приемными компонентами являются, например, предварительный усилитель, а также схема настройки и согласования и схема, чтобы сбивать настройку элемента катушки во время передачи. Дополнительно, фазовый детектор и блок повторной дискретизации содержатся в модуле цифрового приемника (RXE), при этом плата элементов катушки и модуль цифрового приемника специально разделены. Дополнительно, соединение связи между платой элементов катушки и модулем цифрового приемника является чисто цифровым соединением связи. Посредством такой схемы приемника чувствительность приемника к воздействиям поля RF-передачи резко уменьшается, поскольку путь сигнала через аналоговые компоненты ограничивается до CEB. Дополнительно, как уже упомянуто выше, аналоговые компоненты могут быть локализованы и дополнительно уменьшены в размере.
В соответствии с дополнительным вариантом осуществления изобретения приемник дополнительно содержит кодер, подключенный к аналого-цифровому преобразователю для кодирования цифрового дискретного входного сигнала в цифровой сигнал передачи, декодер, подключенный к блоку повторной дискретизации, для декодирования цифрового дискретного входного сигнала из цифрового сигнала передачи, а также модуль восстановления тактового сигнала, подключенный между кодером и декодером. Модуль восстановления тактового сигнала приспособлен для восстановления локального тактового сигнала из цифрового сигнала передачи, при этом локальный тактовый сигнал, используемый фазовым детектором для определения разности фаз, является локальным тактовым сигналом, восстановленным посредством модуля восстановления тактового сигнала.
Это имеет преимущество в том, что локальный тактовый сигнал не требуется передавать отдельно из локального тактового генератора фазовому детектору. Это дополнительно уменьшает сложность электронных компонентов.
В соответствии с дополнительным вариантом осуществления изобретения кодер приспособлен для предоставления тактового сигнала и совместимого с восстановлением данных кодирования цифрового дискретного входного сигнала. Например, может быть использовано 8Б/10Б-кодирование или 64Б/64Б-кодирование.
Это имеет преимущество в том, что данные ADC могут передаваться по однонаправленному последовательному соединению, допускающему реализацию на основе стандартных цифровых компонентов связи. Это может, например, быть реализовано как линия гальванической дифференциальной сигнализации низкого напряжения (LVDS) или как световод с оптическим передатчиком на конце ADC и оптическим приемником на конце блока повторной дискретизации. Использование световода дополнительно упрощает схему радиочастотной катушки, поскольку он фундаментально устраняет RF-взаимодействия с полем RF-передачи.
В соответствии с дополнительным вариантом осуществления изобретения фазовый детектор содержит первый счетчик, второй счетчик и схему вычисления фаз, первый счетчик подсчитывает локальные тактовые импульсы, а второй счетчик подсчитывает системные тактовые импульсы, при этом схема вычисления фаз приспособлена для вычисления разности фаз между системным тактовым сигналом и локальным тактовым сигналом из подсчета разности первого и второго счетчика. Это позволяет реализовывать фазовый детектор исключительно цифровыми средствами, избегая характерных проблем точности, ассоциированных с аналоговым решением, и предоставляя возможность миниатюризации и интеграции посредством стандартных цифровых технологий.
В другом аспекте изобретение относится к устройству магнитно-резонансной томографии, содержащему радиочастотную катушку и прямой цифровой приемник согласно изобретению.
В другом аспекте изобретение относится к способу предоставления радиочастотного сигнала радиочастотной катушки, в частности, системы магнитно-резонансной томографии, в качестве цифрового дискретного выходного сигнала с частотой цифровой обработки во временной основе системного тактового сигнала, при этом способ содержит этап, на котором преобразуют посредством аналого-цифрового преобразователя аналоговый радиочастотный сигнал, принятый от радиочастотной катушки, в цифровой дискретный входной сигнал, при этом аналого-цифровой преобразователь управляется посредством локального тактового сигнала, при этом локальный тактовый генератор предоставляет локальный тактовый сигнал во временной основе локального тактового сигнала аналого-цифровому преобразователю, временная основа локального тактового сигнала не зависит от временной основы системного тактового сигнала. Способ дополнительно содержит этап, на котором определяют разность фаз между системным тактовым сигналом и локальным тактовым сигналом и повторно дискретизируют цифровой дискретный входной сигнал в цифровой дискретный выходной сигнал с помощью разности фаз.
Следует упомянуть, что способ по изобретению может преимущественно быть выполнен на большинстве MR-устройств в клиническом применении в настоящее время. Для этого необходимо просто использовать компьютерную программу, посредством которой MR-устройство управляется так, что оно выполняет этапы вышеописанного способа по изобретению. Компьютерная программа может быть представлена либо на носителе данных, либо представлена в сети данных так, чтобы быть загруженной для установки в блок управления MR-устройства. Следовательно, изобретение также относится к компьютерному программному продукту, содержащему исполняемые компьютером инструкции, чтобы выполнять способ, который описан ранее.
Дополнительно следует упомянуть, что предпочтительно все компоненты на цифровой стороне прямого цифрового приемника могут быть реализованы программными средствами.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения изобретения со ссылками на сопроводительные чертежи, на которых:
Фиг. 1 изображает MR-устройство согласно уровню техники.
Фиг. 2 изображает схематичный чертеж традиционного цифрового узла катушки с разделением функций.
Фиг. 3 изображает ADC, управляемый посредством кварцевого генератора с управлением по напряжению.
Фиг. 4 изображает ADC, управляемый автономным тактовым сигналом ADC.
Фиг. 5 изображает использование 8/10-битного кодирования, для обеспечения восстановление тактового сигнала ADC через последовательное соединение.
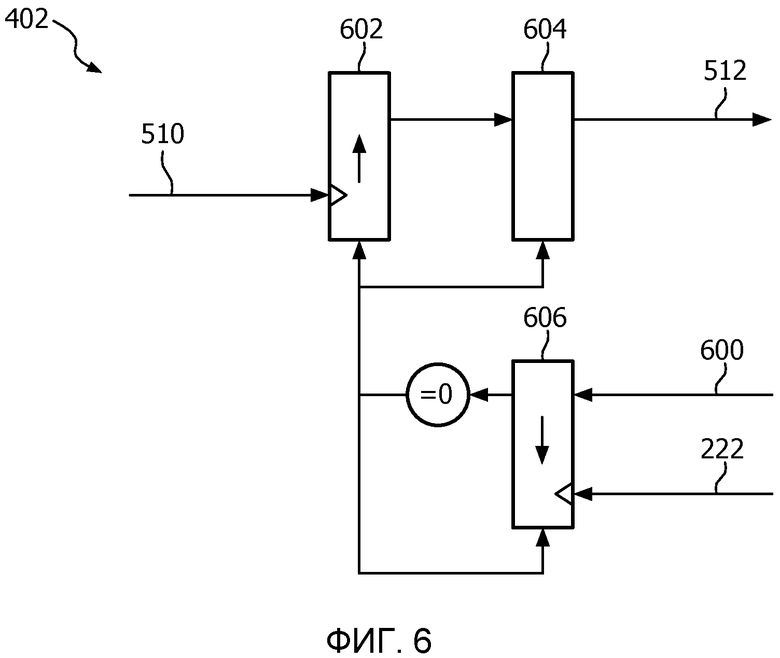
Фиг. 6 изображает полностью цифровой фазовый детектор тактового сигнала ADC.
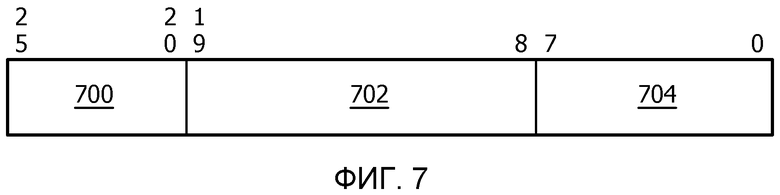
Фиг. 7 изображает формат фаз тактового сигнала ADC.
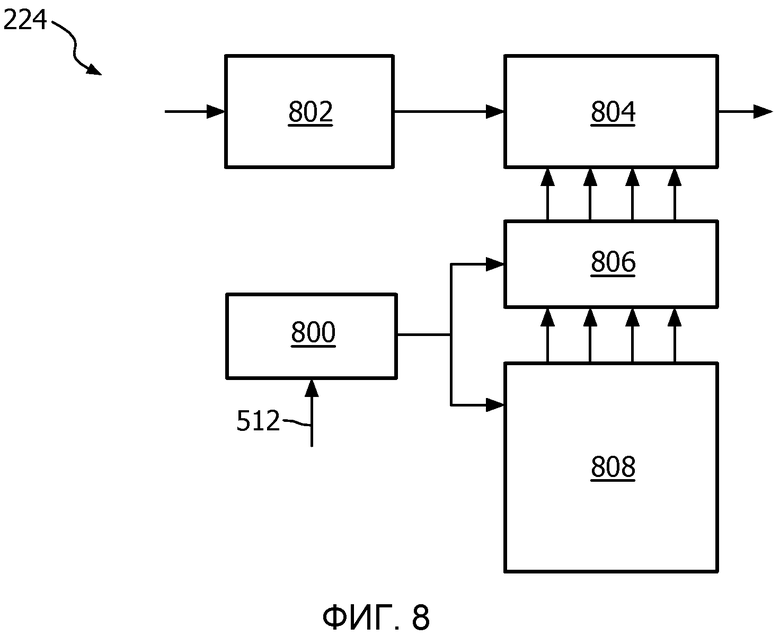
Фиг. 8 изображает блок повторной дискретизации с дополнительной интерполяцией коэффициентов.
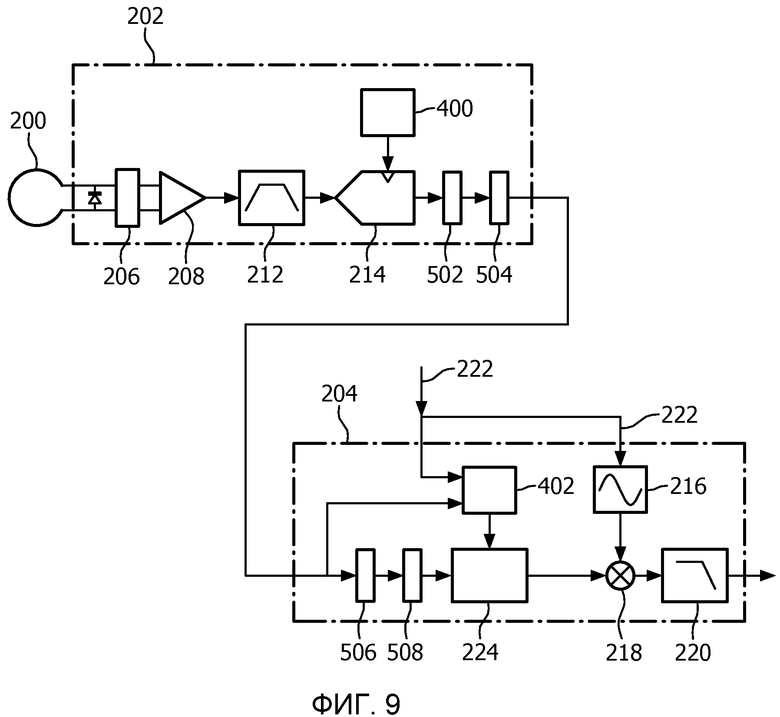
Фиг. 9 изображает схематичный чертеж цифрового узла катушки с разделением функций согласно изобретению.
Описание предпочтительных вариантов осуществления изобретения
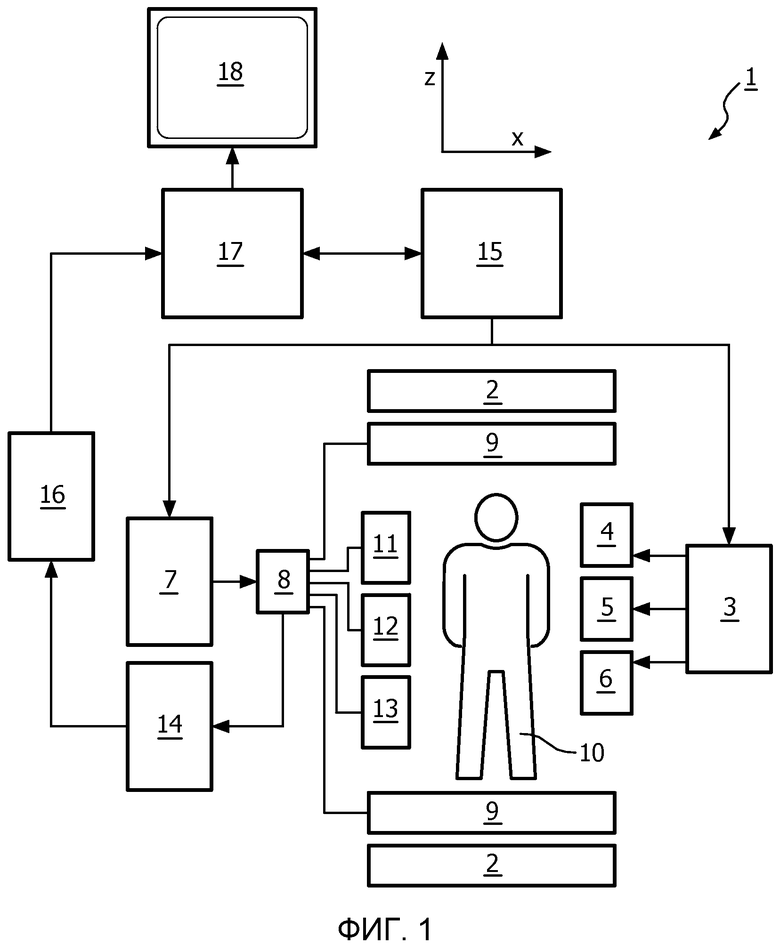
На фиг. 1 показано MR-устройство 1. Устройство содержит сверхпроводящие или резистивные основные магнитные катушки 2, так что, по существу, однородное, постоянное по времени основное магнитное поле создается по z-оси сквозь пространство для исследования.
Система генерирования и манипулирования магнитным резонансом прикладывает последовательность RF-импульсов и меняющих направление градиентов магнитного поля, чтобы инвертировать или возбуждать ядерные магнитные спины, вызывать магнитный резонанс, перефокусировать магнитный резонанс, манипулировать магнитным резонансом, пространственно и иначе кодировать магнитный резонанс, насыщать спины и т.п., чтобы обеспечивать возможность MR-томографии.
Более конкретно, усилитель 3 импульса градиента прикладывает импульсы тока к выбранным из градиентных катушек 4, 5 и 6 по всему телу вдоль x, y и z-осей пространства для исследования. RF-частотный передатчик 7 передает RF-импульсы или пакеты импульсов, через переключатель 8 отправки/приема, RF-катушке 9 всего объема тела, чтобы передавать RF-импульсы в пространство для исследования. Типичная последовательность формирования изображения или последовательность навигации состоит из пакета сегментов RF-импульсов короткой продолжительности, которые, взятые вместе друг с другом, и любыми приложенными градиентами магнитного поля, добиваются выбранного управления ядерным магнитным резонансом. RF-импульсы используются, чтобы насыщать, возбуждать резонанс, инвертировать намагниченность, повторно фокусировать резонанс или управлять резонансом и выбирать часть тела 10, расположенного в пространстве для исследования. MR-сигналы также снимаются RF-катушкой 9 всего объема тела.
Для генерирования MR-изображений ограниченных областей тела 10 посредством параллельного формирования изображений множество локальных упорядоченных RF-катушек 11, 12, 13 помещаются близко к области, выбранной для формирования изображения. Упорядоченные катушки 11, 12, 13 могут быть использованы, чтобы принимать MR-сигналы, возбуждаемые посредством RF-передач катушек тела.
Результирующие MR-сигналы снимаются RF-катушкой 9 всего объема тела и/или радиочастотными катушками 11, 12, 13 набора и демодулируются приемником 14, предпочтительно включающим в себя предварительный усилитель (не изображен). Приемник 14 подключается к радиочастотным катушкам 9, 11, 12 и 13 через переключатель 8 отправки/приема.
Главный компьютер 15 управляет усилителем 3 импульсов градиента и передатчиком 7, чтобы генерировать любые из множества последовательностей изображений, таких как эхо-планарное изображение (EPI), эхо-объемное изображение, градиентное и спин-эхо изображение, быстрое спин-эхо изображение и т.п. Для выбранной последовательности приемник 14 принимает одну или множество линий MR-данных в быстрой последовательности следом за каждым возбуждающим RF-импульсом. Система 16 получения данных выполняет аналого-цифровое преобразование принятых сигналов и преобразует каждую линию MR-данных в цифровой формат, подходящий для дальнейшей обработки. В современных MR-устройствах система 16 получения данных является отдельным компьютером, который специализирован в получении исходных данных изображения.
В конечном счете, цифровые исходные данные изображения реконструируются в представление изображения посредством процессора 17 реконструкции, который применяет преобразование Фурье или другие подходящие алгоритмы реконструкции. MR-изображение может представлять плоское сечение сквозь пациента, множество параллельных плоских сечений, трехмерный объем или т.п. Изображение затем сохраняется в памяти изображений, где оно может быть доступно для преобразования сечений, проекций или других частей представления изображения в подходящий формат для визуализации, например, через видеомонитор 18, который обеспечивает воспринимаемое человеком отображение результирующего MR-изображения.
Вместо использования отдельного приемника 14 и отдельной системы 16 получения данных, выполняющих аналого-цифровое преобразование принятых сигналов, согласно настоящему изобретению используется прямой цифровой приемник для RF-катушек. В результате, переключатель 8 и аналого-цифровой преобразователь 16 объединяются в плату элементов катушки. Дополнительно, предусматривается модуль цифрового приемника, который обрабатывает оцифрованные сигналы и повторно дискретизирует их желаемым образом так, что сигналы могут быть использованы для реконструкции посредством процессора 17 реконструкции.
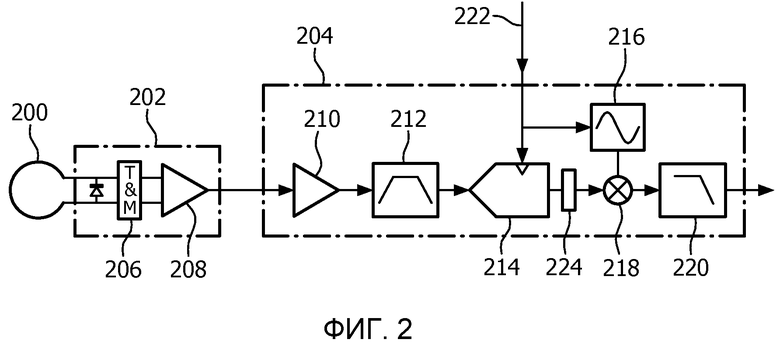
Фиг. 2 изображает схематичный чертеж традиционного прямого цифрового приемника с разделением функций. Прямой цифровой приемник является цифровым узлом катушки, состоящим из платы 202 элементов катушки (CEB) и модуля 204 цифрового приемника (RXE). Аналоговая электроника, ассоциированная с каждым элементом 200 катушки, состоит из предварительного усилителя 208, а также схемы 206 настройки и согласования, а также схемы, чтобы сбивать настройку элемента катушки во время передачи. Компоненты 206 и 208 располагаются на CEB 202.
RXE 204 содержит усилитель 210, полосовой фильтр 212, аналого-цифровой преобразователь (ADC) 214, демодулятор 218, фильтр 220 нижних частот, блок 224 повторной дискретизации, а также тактовый генератор 216. Демодулятор 218, фильтр 220 нижних частот и тактовый генератор 216 вместе составляют то, что обычно называется цифровым понижающим преобразователем (DDC). Системный тактовый сигнал 222 предоставляется ADC 214, так что обеспечивается синхронизация частоты с системным тактовым сигналом.
Прямые цифровые приемники, которые показаны на фиг. 2, а также которые используются в настоящем изобретении, предпочтительно используют субдискретизацию с ограниченным диапазоном частот, чтобы избегать промежуточной частоты (IF). Это исключает ассоциированный аналоговый преобразователь частоты, чтобы преобразовывать несущую MR-частоту до частоты, подходящей для аналого-цифрового преобразования. Исключение промежуточной частоты и ассоциированного преобразователя частоты значительно уменьшает число аналоговых компонентов. Цифровая реализация этих функций допускает чрезвычайную миниатюризацию и экономию энергии за счет стандартной технологии цифровой интегральной схемы.
Чтобы обеспечивать свободу проектирования системы и упрощать схему фильтра для подавления помех, используется повторно дискретизирующий DDR. Эта технология позволяет выбирать частоту дискретизации ADC независимо от частоты, с которой последующие цифровые функции, такие как демодуляция и фильтрация, управляются и обрабатываются.
Однако на фиг. 2 повторно дискретизирующий DDR все еще требует, чтобы частота дискретизации ADC оставалась на частоте, синхронизированной с системным тактовым сигналом 222, используемым, чтобы управлять критичными по времени цифровыми функциями системы. В результате, системный тактовый сигнал 222 должен приниматься от внешнего источника и предоставляться как ADC 214, так и генератору 216 демодуляции. Дополнительно, ADC 214 дополнительно требует преобразователь (не показан здесь), чтобы преобразовывать системный тактовый сигнал в подходящую частоту дискретизации ADC. Это ограничивает свободу проектирования относительно расположений ADC и ассоциированного тактового генератора, поскольку для возбуждения ADC системный тактовый сигнал всегда должен быть доступным в ADC.
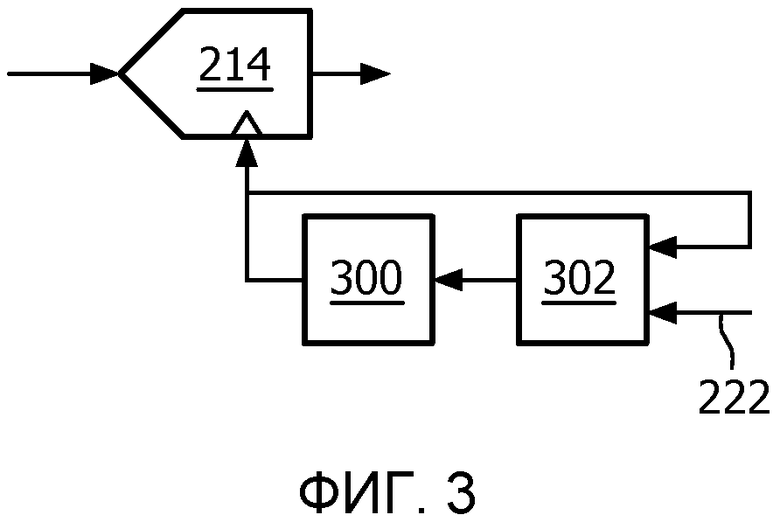
Как иллюстрировано на фиг. 3, синхронизация частоты для высокой точности тактового сигнала ADC типично реализуется в системе предшествующего уровня техники через контур фазовой синхронизации (PPL), состоящий из аналогового фазового детектора 302 и кварцевого генератора 300 с управлением по напряжению (VCXO), при этом фазовый детектор 302 принимает в качестве входного сигнала системный тактовый сигнал 222 и локальный тактовый сигнал, выводимый из кварцевого генератора 300 с управлением по напряжению.
Системный тактовый сигнал в такой схеме обычно восстанавливается непосредственно из потока управляющих данных, передаваемого системой. Синхронизация частоты по тактовому сигналу ADC имеет два недостатка, а именно распространение тактового сигнала в ADC и привнесение шума, присутствующего в системном тактовом сигнале и тактовом сигнале ADC.
Для того, чтобы преодолевать эти проблемы, независимый тактовый сигнал ADC может быть получен непосредственно от кварцевого генератора 400, как показано на фиг. 4. Дополнительным преимуществом этого подхода является то, что управление по напряжению больше не требуется на генераторе, более простого кварцевого генератора будет достаточно.
Следует отметить, что выражение "независимый тактовый сигнал ADC" должно пониматься как локальный тактовый сигнал с временной основой локального тактового сигнала, не зависящей от временной основы системного тактового сигнала. Использование автономного тактового сигнала ADC требует расширения блока 224 повторной дискретизации повторно дискретизирующего DDR, чтобы принимать во внимание сдвиг частоты независимого тактового сигнала ADC. Это реализовано на фиг. 4. Локальный тактовый сигнал кварцевого генератора 400 ADC 214 вводится вместе с системным тактовым сигналом 222 в фазовый детектор 402, при этом фазовый детектор 402 приспособлен для определения разности фаз между системным тактовым сигналом и локальным тактовым сигналом. Эта разность фаз затем используется блоком 224 повторной дискретизации для повторной дискретизации цифрового дискретного сигнала, принятого от ADC 214, в желаемый цифровой дискретный выходной сигнал с помощью разности фаз.
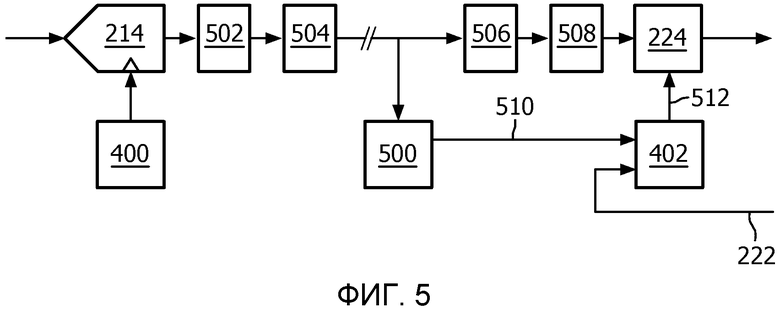
Тактовый сигнал ADC теперь больше не загрязняется шумом в системном тактовом сигнале. Чтобы устранять ограничение по местоположению ADC, удобно кодировать выходной сигнал ADC, чтобы позволять передачу по последовательной цифровой линии связи. Обычной схемой кодирования является так называемое кодирование 8 в 10 бит (8B/10B-кодирование), используемое различными протоколами последовательной цифровой связи. Эта схема кодирования позволяет восстановление тактового сигнала и, таким образом, позволяет восстанавливать тактовый сигнал ADC из самого канала передачи данных ADC. Это дает в результате схему, иллюстрированную на фиг. 5.
В схеме, изображенной на фиг. 5, локальный тактовый генератор 400 предоставляет локальный тактовый сигнал в ADC 214. Аналоговый сигнал, введенный в ADC 214, оцифровывается посредством ADC и кодируется посредством кодера 502 с помощью, например, 8Б/10Б-кодирования. Параллельно-последовательный преобразователь 504 и последовательно-параллельный преобразователь 506 обеспечивают передачу по последовательной линии связи. Из потока данных, передаваемого между параллельно-последовательным преобразователем и последовательно-параллельным преобразователем, модуль 500 восстановления тактового сигнала способен восстанавливать локальный тактовый сигнал ADC. Этот локальный тактовый сигнал 510 ADC затем вводится вместе с системным тактовым сигналом 222 в фазовый детектор 402. Детектированная разность фаз в конечном счете используется блоком 224 повторной дискретизации для повторной дискретизации потока данных после последовательно-параллельного преобразования и декодирования с помощью декодера 508. Здесь декодер 508 является 10/8-битным декодером.
Предпочтительно, для передачи данных ADC между параллельно-последовательным преобразователем и последовательно-параллельным преобразователем предполагается световод с оптическим передатчиком на конце ADC и оптическим приемником на конце блока повторной дискретизации.
Детектирование фазы тактового сигнала ADC состоит из определения частоты тактового сигнала ADC, выраженной в единицах системного тактового сигнала. Например, реализация такого детектора 402 может содержать два счетчика 602 и 606, как подробно иллюстрировано на фиг. 6.
На фиг. 6 счетчик 602 подсчитывает восстановленные тактовые импульсы 510 ADC, а счетчик 606 подсчитывает системные тактовые импульсы 222. Дополнительно, период 600 подсчета может быть указан фазовому детектору. Разница в этих двух счетчиках 602 и 606, нормализованная по периоду 600 подсчета, определяет частотный и фазовый сдвиг между тактовым сигналом ADC и системным тактовым сигналом. Здесь, подсчет выполняется, например, посредством 26-битного фазового счетчика 604, приспособленного для вычисления разности фаз между системным тактовым сигналом и локальным тактовым сигналом.
Посредством подсчета в течение продленного периода времени точность сдвига фаз может быть повышена в произвольной степени. Период подсчета, однако, должен предпочтительно соответствовать типичной стабильности тактового генератора ADC.
Например, при работе с частотой 50 МГц, период детектирования около 1 секунды требует 26-битных счетчиков и дает в результате погрешность частоты менее чем в 1 Гц.
Предпочтительно, что детектированная фаза ADC точно определяет скачок фазы, требуемый блоком повторной дискретизации. Число фаз может быть использовано непосредственно в качестве входных данных для блока повторной дискретизации.
В то время как блок повторной дискретизации предшествующего уровня техники, который проиллюстрирован на фиг. 2, допускает только частоты, кратные 1 МГц, блок повторной дискретизации, требуемый здесь, должен быть способен повторно дискретизировать частоты с гораздо более высокой точностью. Требуемая точность должна значительно превышать полосу частот полученного сигнала.
Ограничение кратными числами для 1 МГц в схеме повторной дискретизации современного уровня техники накладывает ограничение на число коэффициентов интерполятора и соответствующий размер таблицы коэффициентов интерполятора. Это ограничение размера таблицы может поддерживаться посредством использования повышенной точности фазы, чтобы выполнять интерполяцию в коэффициентах, определенных для ограниченного числа частот. Например, детектируя 50×220 периодов тактового сигнала с частотой 50 МГц, результирующий счетчик фаз будет удерживать фазу с точностью 1 МГц в бите 20 и выше, где 20 битов более низкого порядка определяют дробную фазу. Интерполяция может быть ограничена 12-битной интерполяцией, чтобы соответствовать числу битов коэффициента блока повторной дискретизации. Только 12 битов более высокого порядка части фазы тогда требуются блоком повторной дискретизации.
Фиг. 7 иллюстрирует формат слова счетчика фаз. Здесь счетчик фаз должен пониматься как фаза частоты тактового сигнала ADC относительно частоты системного тактового сигнала. На фиг. 7 биты 25-20 (ссылочный номер 700) определяют фазу повторной дискретизации в МГц. Биты 19-8 определяют 12-битную дробную фазу для интерполяции коэффициентов блока повторной дискретизации (ссылочный номер 702). Биты 7-0 или неиспользуемые биты (ссылочный номер 704).
Блок повторной дискретизации теперь требует дополнительной стадии, чтобы интерполировать коэффициенты, сохраненные в таблице коэффициентов. Это иллюстрируется на фиг. 8. Блок 224 повторной дискретизации, иллюстрированный на фиг. 8, содержит блок 802 передачи дискретных значений, счетчик 800 фаз, интерполятор 804 и блок 808 таблицы коэффициентов. Значение фазы подается блоку повторной дискретизации периодически, например в конце каждого периода детектирования фазовым детектором. 6 битов индекса (биты 25-20) вводятся в 12-битную таблицу коэффициентов, тогда как часть 12 битов (биты 19-8) вводятся в интерполятор коэффициентов.
В процессе работы блок повторной дискретизации сначала передает дискретные значения входного цифрового дискретного сигнала (например, от ADC), полученные с частотой дискретизации ADC, электронным средствам, работающим с частотой цифровой обработки, т.е. частотой системного тактового сигнала. Переданные дискретные значения интерполируются, чтобы генерировать дискретные значения второго цифрового дискретного сигнала с частотой цифровой обработки. Относительная фаза частоты дискретизации первого цифрового входного дискретного сигнала относительно частоты цифровой обработки системного тактового сигнала определяет, когда передавать дискретное значение.
Использование 26-битного счетчика фаз в блоке повторной дискретизации и 1-секундного периода детектирования частоты обеспечивает точность частоты в 1 Гц. Этого достаточно, чтобы обеспечивать точность повторной дискретизации согласно требованиям, налагаемым большинством прикладных задач MR-томографии и спектроскопии. Однако более высокая точность может быть получена, когда требуется, просто посредством подсчета в течение более длительного периода времени.
Следует отметить, что хотя точность частоты ADC равна 1 Гц в вышеописанном проекте, точность, с которой интерполяция выполняется, равна только 250 Гц. Это обычно не является проблемой, поскольку полоса частот сигнала, в которой получают сигнал, пропорциональна требуемой точности. Более низкая полоса частот сигнала требует более высокого понижающего коэффициента и, следовательно, увеличения в точности вследствие усреднения, выполняемого фильтром ограничения полосы частот. Это увеличение пропорционально квадратному корню из понижающего коэффициента. Другими словами, также точность частоты каждой отдельной дискретной точки ограничивается, точность частоты сигнального фильтра для полученной полосы частот сигнала увеличивается на квадратный корень из понижающего коэффициента с максимумом точности частоты, соответствующим периоду подсчета.
Например, при полосе частот сигнала 1 МГц понижающий коэффициент равен 50, а результирующая точность частоты равна ~250 Гц/√50=~36 Гц. Полоса частот сигнала 5 кГц требует понижающего коэффициента 10,000 и дает в результате точность частоты, равную ~250 Гц/√10,000=~2,5 Гц.
Если точность частоты блока повторной дискретизации осталась равной 1 МГц, как в текущей схеме блока повторной дискретизации без интерполятора коэффициентов, тогда точность частоты при полосе частот сигнала 1 МГц будет равна приблизительно 140 кГц, а при полосе частот сигнала 5 кГц - только приблизительно 10 КГц.
На практике коммерческие кварцевые генераторы обеспечивают точность частоты ≤50 имп./мин или ≤2,500 Гц при 50 МГц. Точность частоты вышеописанной схемы, следовательно, значительно ниже ожидаемой точности и достаточна, чтобы компенсировать разброс выхода в частоте кварцевого генератора. Если требуется повышенная точность, тогда требуются дополнительные биты как в коэффициентах блока повторной дискретизации, так и на стадиях интерполяции.
Фиг. 9 изображает схему прямого цифрового приемника согласно изобретению. Приемник содержит два компонента, а именно CEB 202 и RXE 204. В схеме приемника на фиг. 9 фильтр 212 для подавления помех и ADC 214 перемещены на CEB 202, и передача радиочастотного сигнала между CEB и RXE является полностью цифровой и потенциально оптической. Внешне доступный системный тактовый сигнал 222 предоставляется только фазовому детектору 402 и генератору 216 демодуляции в RXE 204, тогда как локальный тактовый генератор 400, управляющий ADC 214, работает обособленным образом, т.е. является автономным. Следовательно, информация тактового сигнала передается преобразованным в последовательную форму и закодированным образом в цифровом виде от ADC 214 блоку 224 повторной дискретизации. Модуль восстановления тактового сигнала, не изображенный на фиг. 9, способен выполнять восстановление тактового сигнала из переданного сигнала, так что фазовый детектор 402 способен определять относительную фазу позиции дискретизации ADC относительно системного тактового сигнала 222.
Использование DDR в узле катушки, иллюстрированном на фиг. 9, обеспечивает значительное уменьшение полосы частот сигнала для передачи по традиционным цифровым сетям. Если доступна достаточная пропускная способность сети, альтернативная реализация может отправлять ADC-данные непосредственно компьютеру для программной обработки. Детектирование фаз требуется либо исключительно программными средствами, например посредством корреляции полученного сигнала с другими сигналами, либо через добавление точного детектора фаз в каждый канал связи.
Топология на фиг. 9 имеет различные характеристики: одной характеристикой является то, что все аналоговые RF-компоненты ограничиваются CEB. Дополнительно, вся передача радиочастотного сигнала является полностью цифровой. Это позволяет выполнять надежную передачу оптического сигнала с абсолютным иммунитетом к влиянию поля RF-передачи. Дополнительно, RXE является полностью цифровым, устраняя инженерные проблемы, связанные со смешанной структурой сигнала. Нет необходимости в тактовом сигнале высокой точности в RXE, и восстановления тактового сигнала на основе простого управляемого по напряжению генератора для цифровой линии связи с системой достаточно, чтобы поддерживать синхронизацию с другими компонентами системы. Следует отметить, что вместо управляемого по напряжению генератора может быть использован любой вид надежного и стабильного тактового генератора.
Дополнительно, характеристикой топологии, иллюстрированной на фиг. 9, является то, что тактовый сигнал ADC происходит непосредственно из локального тактового генератора (условное обозначение 400). Тактовый сигнал ADC автономен, таким образом сохраняя отличную кратковременную точность кварцевого генератора. В результате использования автономного генератора, например кварцевого генератора, вместо управляемого по напряжению генератора в системе фазовой синхронизации (PLL) тактовый сигнал ADC не засоряется шумом в сигнале управления по напряжению. Дополнительно, все частотно зависимые компоненты могут быть изолированы в одном компоненте (CEB). RXE больше не является частотно зависимым. Тем не менее, все еще необходимо конфигурировать частоту тактового сигнала ADC, RXE не имеет частотно зависимых компонентов, таким образом уменьшая число типов компонентов.
Дополнительной характеристикой топологии на фиг. 9 является то, что хотя количество компонентов CEB увеличилось, существует возможность миниатюризации при помощи технологий гибридных интегральных схем. Множество CEB, требуемое во время производства, может быть, по существу, обосновано развитием ASIC (специализированная интегральная схема). ASIC - это интегральная схема, больше приспособленная для определенного использования, чем для многоцелевого использования. Как следствие, уже невозможно манипулировать функционированием ASIC. Однако затраты на производство ниже.
Наконец, одной характеристикой топологии на фиг. 9 является то, что предоставляется дополнительная свобода проектирования радиочастотной катушки, позволяющая альтернативные топологии компонентов. Это может, например, быть использовано, чтобы достигать более однородного распределения мощности.
Изобретение относится к прямому цифровому приемнику. Техническим результатом является упрощение схемы прямого цифрового приемника. Приемник содержит: аналого-цифровой преобразователь (214) для преобразования аналогового сигнала, принятого от радиочастотной катушки (11, 12, 13, 200), в цифровой дискретный входной сигнал, аналого-цифровой преобразователь (214) управляется локальным тактовым сигналом, локальный тактовый генератор (400), приспособленный для предоставления локального тактового сигнала во временной основе локального тактового сигнала аналого-цифровому преобразователю (214), временная основа локального тактового сигнала независима от временной основы системного тактового сигнала, фазовый детектор (402), приспособленный для определения разности (512) фаз между системным тактовым сигналом (222) и локальным тактовым сигналом, блок (224) повторной дискретизации, приспособленный для повторной дискретизации цифрового дискретного входного сигнала в цифровой дискретный выходной сигнал с помощью разности (512) фаз. 4 н. и 4 з.п. ф-лы, 9 ил.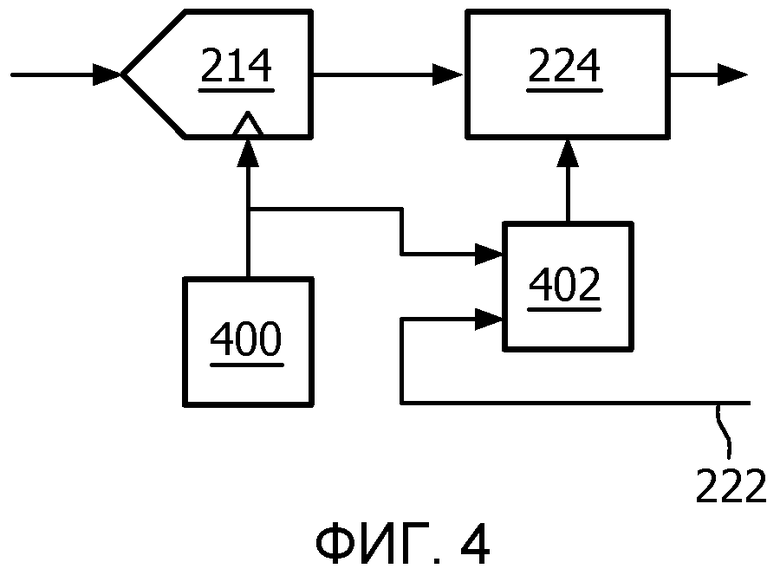
1. Прямой цифровой приемник для радиочастотной катушки (11, 12, 13, 200) системы (1) магнитно-резонансной томографии для предоставления цифрового дискретного выходного сигнала с частотой цифровой обработки во временной основе системного тактового сигнала (222), в частности, системы (1) магнитно-резонансной томографии, содержащий:
аналого-цифровой преобразователь (214) для преобразования аналогового сигнала, принятого от радиочастотной катушки (11, 12, 13, 200), в цифровой дискретный входной сигнал, причем аналого-цифровым преобразователем (214) управляют посредством локального тактового сигнала,
локальный тактовый генератор (400), приспособленный для предоставления локального тактового сигнала во временной основе локального тактового сигнала аналого-цифровому преобразователю (214), причем временная основа локального тактового сигнала независима от временной основы системного тактового сигнала,
фазовый детектор (402), приспособленный для определения разности (512) фаз между системным тактовым сигналом (222) и локальным тактовым сигналом,
модуль (224) повторной дискретизации, приспособленный для повторной дискретизации цифрового дискретного входного сигнала в цифровой дискретный выходной сигнал с помощью разности (512) фаз, и при этом
аналого-цифровой преобразователь (214), локальный тактовый генератор (400) и электронные аналоговые приемные компоненты (206) радиочастотной катушки (200) включены в плату (202) элементов катушки,
фазовый детектор (402) и блок (224) повторной дискретизации включены в модуль (204) цифрового приемника,
плата (202) элементов катушки и модуль (206) цифрового приемника пространственно разделены,
при этом соединение связи между платой элементов катушки и модулем цифрового приемника является чисто цифровым соединением связи.
2. Приемник по п. 1, дополнительно содержащий:
кодер (502), подключенный к аналого-цифровому преобразователю (214) для кодирования цифрового дискретного входного сигнала в цифровой сигнал передачи,
декодер (508), подключенный к блоку (224) повторной дискретизации для декодирования цифрового дискретного входного сигнала из цифрового сигнала передачи,
модуль (500) восстановления тактового сигнала, подключенный между кодером и декодером, причем модуль восстановления тактового сигнала приспособлен для восстановления локального тактового сигнала из цифрового сигнала передачи, при этом локальный тактовый сигнал, используемый фазовым детектором (402) для определения разности фаз, является локальным тактовым сигналом, восстановленным посредством модуля восстановления тактового сигнала.
3. Приемник по п. 2, в котором кодер (502) приспособлен для предоставления тактового сигнала и кодирования цифрового дискретного входного сигнала, согласующегося с восстановлением данных.
4. Приемник по п. 2, дополнительно содержащий параллельно-последовательный преобразователь (504) и последовательно-параллельный преобразователь (506), подключенные между кодером и декодером, при этом параллельно-последовательный преобразователь приспособлен для параллельно-последовательного преобразования цифрового сигнала передачи, а последовательно-параллельный преобразователь приспособлен для последовательно-параллельного преобразования цифрового сигнала передачи, при этом параллельно-последовательный преобразователь и последовательно-параллельный преобразователь управляются локальным тактовым сигналом, при этом модуль (500) восстановления тактового сигнала приспособлен для восстановления локального тактового сигнала из преобразованного в последовательную форму цифрового сигнала передачи.
5. Приемник по п. 1, в котором фазовый детектор (402) содержит первый счетчик (602), второй счетчик (606) и схему (604) вычисления фаз, причем первый счетчик (602) подсчитывает импульсы локального тактового сигнала, а второй счетчик (606) подсчитывает импульсы системного тактового сигнала, при этом схема (604) вычисления фаз приспособлена для вычисления разности (512) фаз между системным тактовым сигналом и локальным тактовым сигналом из вычисления разности первого и второго счетчика.
6. Устройство (1) магнитно-резонансной томографии, содержащее радиочастотную катушку (11, 12, 13, 200) и прямой цифровой приемник по п. 1.
7. Способ предоставления радиочастотного сигнала радиочастотной катушки (11, 12, 13, 200) системы (1) магнитно-резонансной томографии в качестве цифрового дискретного выходного сигнала с частотой цифровой обработки на временной основе системного тактового сигнала (222), содержащий этапы, на которых:
преобразуют посредством аналого-цифрового преобразователя (214) аналоговый радиочастотный сигнал, принятый от радиочастотной катушки (11, 12, 13, 200), в цифровой дискретный входной сигнал, при этом аналого-цифровой преобразователь (214) управляется локальным тактовым сигналом, при этом генератор (400) локального тактового сигнала предоставляет локальный тактовый сигнал во временной основе локального тактового сигнала аналого-цифровому преобразователю (214), причем временная основа локального тактового сигнала независима от временной основы системного тактового сигнала,
определяют разность (512) фаз между системным тактовым сигналом и локальным тактовым сигналом, повторно дискретизируют цифровой дискретный входной сигнал в цифровой дискретный выходной сигнал с помощью разности фаз.
8. Компьютерно-читаемый носитель, содержащий исполняемые компьютером инструкции для выполнения этапов способа предоставления радиочастотного сигнала радиочастотной катушки системы магнитно-резонансной томографии в качестве цифрового дискретного выходного сигнала с частотой цифровой обработки на временной основе системного тактового сигнала по п. 7.
| WO2008075268 A1, 26.06.2008 | |||
| WO2008155703 A1, 24.12.2008 | |||
| WO2009074924 A1, 18.06.2009 | |||
| Способ получения альбумина и др. белков из крови для технических целей | 1938 |
|
SU63664A1 |

