[0001] Устройство магнитно-резонансной томографии (МРТ) используется для визуализации внутренних органов тела. Конкретно, МРТ позволяет использовать свойство ядерного магнитного резонанса (NMR) для визуализации ядер атомов внутри тела. Традиционное устройство МРТ содержит выдвижной стол для пациента, на который укладывают пациента. Пациент перемещается внутри устройства МРТ и при этом большой мощный магнит создает магнитное поле, используемое для выставления намагничивания некоторых атомных ядер внутри тела, а также прикладываются радиочастотные магнитные поля, чтобы систематически изменять выставление этого намагничивания. Это заставляет ядра создавать вращающееся магнитное поле, обнаруживаемое сканером. Эта информация регистрируется, чтобы конструировать изображение сканированной области тела.
[0002] Для повышения эффективности при выполнении сканирования в работе устройства МРТ были проведены изменения. Конкретно, устройство МРТ может содержать катушки беспроводной связи, устраняющие необходимость в кабельных подключениях. Катушки беспроводной связи позволяют иметь значительные преимущества в процессе работы, поскольку исключается необходимость подключения и отключения кабелей. Использование катушек беспроводной связи обычно не требует какого-либо уменьшения размера канала устройства МРТ, поэтому по сравнению с традиционными нормами может также быть реализована повышенная плотность катушек. Однако аналогично любой радиосистеме распространение сигнала может в значительной степени подвергаться различным непредотвратимым эффектам, таким как фазовая ошибка, которая может коренным образом изменять вычисления, выполняемые при сканировании. В одном из примеров генератор тактовых импульсов устройства МРТ не может должным образом быть синхронизирован с системным тактовым генератором, в котором выполняются вычисления.
[0003] Соответственно, желательно определить и/или синхронизировать тактовый генератор цифрователя устройства МРТ, чтобы более точно выполнять сканирование МРТ. Таким образом, существует необходимость в системе, обеспечивающей индикацию или фиксированный сигнал для выполняемого сканирования.
[0004] Примерные варианты осуществления относятся к системе и способу [должно быть вставлено]. Способ содержит этапы, на которых [должно быть вставлено].
[0005] Фиг. 1 показывает систему для помещения сканирования согласно примерным вариантам осуществления.
[0006] Фиг. 2 показывает устройство визуализации согласно примерным вариантам осуществления.
[0007] Фиг. 3 показывает устройство МРТ согласно примерным вариантам осуществления.
[0008] Фиг. 4 показывает устройство индикатора для формирования индикации рассогласования тактового генератора цифрователя устройства МРТ согласно примерным вариантам осуществления.
[0009] Фиг. 5 показывает последовательность выполнения синхронизации для настройки тактового генератора цифрователя устройства МРТ согласно примерным вариантам осуществления.
[0010] Фиг. 6 показывает способ индикации рассогласования тактового генератора цифрователя устройства МРТ согласно примерным вариантам осуществления.
[0011] Фиг. 7 показывает способ настройки тактового генератора цифрователя устройства МРТ в соответствии с примерными вариантами осуществления.
[0012] Фиг. 8 показывает конкретную последовательность выполнения синхронизации для настройки тактового генератора цифрователя устройства МРТ в соответствии с примерными вариантами осуществления.
[0013] Примерные варианты осуществления могут стать более понятными при обращении к последующему описанию примерных вариантов осуществления и к сопутствующим приложенным чертежам, на которых схожие элементы обозначены схожими ссылочными позициями. Примерные варианты осуществления относятся к системе и способу выполнения сканирования МРТ, используя устройство МРТ, содержащее катушки беспроводной связи, в которых тактовый генератор цифрователя устройства МРТ сначала анализируется на основании системного тактового генератора. Конкретно, в первом механизме тактовый генератор цифрователя может быть проанализирован, чтобы обеспечить индикацию в отношении надежности сканирований МРТ, что должно в итоге дать результат, основанный на текущих состояниях тактового генератора цифрователя. Во втором механизме тактовый генератор цифрователя может быть проанализирован, чтобы обеспечить фиксированный сигнал для синхронизации тактового генератора цифрователя с системным тактовым генератором. Процедура МРТ, устройство МРТ, возможности беспроводной связи, тактовый генератор цифрователя и системный тактовый генератор, индикация, синхронизация и соответствующие способы ниже будут объяснены подробно.
[0014] На фиг. 1 показана система для помещения 100 сканирования согласно примерным вариантам осуществления. Помещение 100 сканирования используется для пациента, для которого необходимо выполнить получение изображения. Например, пациенту может потребоваться выполнение МРТ конкретного участка тела. Помещение 100 сканирования содержит устройство 105 МРТ, имеющее стол 110 для пациента, панель 115 управления и компоненты 120 МРТ, а также помещение 125 оператора, содержащее устройство 130 визуализации.
[0015] В соответствии с примерными вариантами осуществления устройство 105 МРТ может выполнять сканирование пациента, лежащего на столе 110 для пациента. Конкретно, устройство 105 МРТ может использовать для выполнения сканирования компоненты 120 МРТ. Пациент может перемещаться внутри канала устройства 105 МРТ с помощью входных сигналов, принимаемых на панели 115 управления. Панель 115 управления может позволить оператору перемещать стол 110 для пациента с целью выставления, которое должно выполняться, когда стол 110 для пациента движется к изоцентру (точке в пространстве, через которую должен проходить центральный луч излучения).
[0016] Компоненты 120 МРТ могут содержать множество компонент, таких как магнит, градиентные катушки, радиочастотные (РЧ) катушки и РЧ детектор. Магнит создает сильное магнитное поле вокруг области, в которой получают изображение при процедуре визуализации. Это магнитное поле позволяет выставлять ядра (например, ядра водорода молекул воды) в соответствии с направлением поля. Градиентные катушки могут располагаться внутри магнита, чтобы создавать градиент магнитного поля в различных направлениях (например, X, Y и Z). РЧ катушки могут быть расположены внутри градиентных катушек, чтобы создавать дополнительное поле, необходимое для вращения спинов на различные углы (например, 90°, 180° и т. д.), выбранные с помощью импульсной последовательности. Таким образом, радиочастотный сигнал, испускаемый возбужденными атомами водорода в теле, может быть обнаружен, используя энергию осциллирующего магнитного поля, приложенного на соответствующей резонансной частоте. Ориентацией изображения можно управлять, варьируя магнитным полем, созданным магнитом, используя для этого градиентные катушки, а контраст между тканями определяется скоростью, с которой возбужденные ядра возвращаются в равновесное состояние. Конкретно, РЧ детектор может принимать результаты этих измерений энергии и подавать данные на устройство 130 визуализации для обработки, чтобы, в конечном итоге, сформировать изображения сканирования.
[0017] Традиционное устройство МРТ для градиентных и РЧ катушек использует кабельные подключения, которые при использовании подключаются и отключаются. В отличие от этого, примерные варианты осуществления относятся к использованию устройства 105 МРТ, в котором используются катушки беспроводной связи. Конкретно, кабельная подводка к градиентным и РЧ катушкам может быть заменена беспроводной линией. Примером такой беспроводной линии может быть одночастотная микроволновая линия связи со многими входами и многими выходами (MIMO). Компоненты 120 МРТ устройства 105 могут содержать преобразователь с повышением частоты для каждой катушки и матрицу приемопередатчиков в канале устройства 105 МРТ. Конкретно, компоненты 120 МРТ могут быть выполнены так, что приемопередатчики подключены к матрице антенн, интегрированных в канал. Компоненты 120 МРТ могут содержать гетеродин, формирующий сигнал в приемопередатчиках, которые могут запитывать антенную матрицу для облучения электронных устройств катушек. Сигнал гетеродина может также преобразовывать микроволновые сигналы, принимаемые от катушек, обратно на первоначально выбранную частоту магнитного резонанса. Они могут упаковываться как данные, которые должны приниматься устройством 130 визуализации для обработки, чтобы сформировать изображение из данных сканирования.
[0018] С точки зрения этого механизма беспроводной связи, используемого устройством 105 МРТ, сигналы, передаваемые для формирования данных, на которых устройство 130 визуализации основывает обработку для формирования изображения, подвергаются воздействию различных помех и других эффектов, изменяющих достоверность данных. Например, как и в любых системах цифровых приемников, фазовый шум тактового генератора цифрователя устройства 105 МРТ может переходить в пониженное качество и/или в пониженную достоверность реконструированного изображения. Конкретно, в отношении катушек беспроводной связи в устройстве 105 МРТ тактовый генератор цифрователя синхронизируется по каналу беспроводной связи с риском добавления ухудшений к тактовому сигналу. Специалисты в области техники должны понимать, что тактовый генератор цифрователя обеспечивает базовый уровень, при котором сигналы распространяются так, что когда тактовый генератор цифрователя выходит из синхронизма с системным тактовым генератором, результирующие данные становятся тем более недостоверными, чем выше рассогласование, существующее между тактовым генератором цифрователя и системным тактовым генератором. Поэтому, примерные варианты осуществления обеспечивают механизм, гарантирующий качество обслуживания посредством введения компонент аппаратного и/или программного обеспечения и катушки цифрового приемника, которая позволяет измерения опорного сигнала, или индикатора принимаемого фазового шума (Received Phase Noise Indicator, RPNI), который подробно обсуждается ниже. Как станет более очевидно ниже, по функциональным возможностям опорный сигнал и RPNI могут быть подобны индикатору мощности принимаемого сигнала в системах беспроводной связи, хотя и являются более ограниченными и конкретными для устройства 105 МРТ.
[0019] Как должны понимать специалисты в области техники, МРТ является способом визуализации, который использует частотное и фазовое кодирование протонов (например, водородных ядер в молекулах воды) для реконструкции изображения. В конкретном примере, где синхронизация тактового генератора цифрователя может быть в высшей степени существенной, фазовый шум тактового генератора цифрователя может вызывать артефакты изображения вследствие природы способа кодирования, особенно во время длительных сборов данных/сканирований. Соответственно, это может быть очень важным иметь тактовый генератор цифрователя, который минимизирует среднеквадратичную (RMS) фазовую ошибку оцифрованного сигнала. Например, если помеховая среднеквадратичная фазовая ошибка, вносимая тактовым генератором цифрователя в необработанные данные изображения должна быть установлена ниже 1 градуса, то RMS временной джиттер предпочтительно должно оставаться меньше 44 пикосекунд (пс) на частоте 64 МГц и меньше 22 пс на частоте 128 МГц. Как обсуждалось выше, традиционное устройство МРТ может использовать тактовый генератор цифрователя, синхронизированный, используя проводное или оптоволоконное соединение, с высокостабильным системным тактовым генератором. Однако с помощью беспроводного устройства 105 МРТ синхронизация тактового генератора цифрователя выполняется с помощью беспроводных технологий, что вызывает описанные выше проблемы, в частности, с чистотой сигнала и последующей достоверностью.
[0020] Более конкретно, тактовый генератор цифрователя может быть синхронизирован, передавая сигнал несущей частоты в качестве тонового пилот-сигнала от устройства 130 визуализации к устройству 105 МРТ. Например, тоновый пилот-сигнал может быть опорным сигналом или RPNI. Устройство 105 МРТ может содержать схему внутри компонент 120 МРТ, которая усиливает тоновый пилот-сигнал, который затем фильтруется и используется для синхронизации схемы фазовой автоподстройки частоты (PLL). Фазовый шум Φr(t) выделенного тактового сигнала может быть комбинацией фазового шума Φp(t) принятого пилот-сигнала и фазового шума, сформированного PLL. Любые искажения в канале или в схеме выделения тактового сигнала (например, PLL) могут добавлять фазовый шум к выделенному тактовому сигналу. Некоторые из этих искажений могут быть вызваны движением пациента (например, интерференция) или искажением в канале пилот-сигнала беспроводной связи. Другие искажения могут возникать из-за сбоя аппаратурного обеспечения в схеме выделения тактового сигнала. Любая из этих проблем с синхронизацией тактового генератора цифрователя может приводить к плохому и недостоверному качеству изображения и к потенциальному обращению в сервисную службу/простою сканера. Раннее обнаружение плохих характеристик фазового шума может приводить к ранним профилактическим мерам и корректирующим действиям, чтобы повысить удовлетворенность потребителя устройством 105 МРТ. Например, персоналу/оператору сканера может быть рекомендовано контролировать движение пациента или службе технического обслуживания в условиях эксплуатации еще до ухудшения изображения может быть сообщено об ухудшении RPNI.
[0021] В соответствии с примерными вариантами осуществления устройство 130 визуализации может сформировать RPNI и передать его устройству 105 МРТ, чтобы синхронизировать тактовый генератор цифрователя. В первом случае устройство 105 МРТ может содержать механизм, использующий опорный сигнал для определения точности тактового генератора цифрователя посредством выполнения вычисления. Опорный сигнал может быть сигналом, основанным на системном тактовом генераторе, который формирует базис для синхронизации. Результатом этого вычисления может быть рассогласование, которое указывает, достоверны ли данные, предоставляемые устройством 105 МРТ устройству 130 визуализации для формирования изображения. Могут существовать заданные пороги для рассогласования, чтобы при превышении одного из этих порогов, устройство МРТ 105 могло бы препятствовать проведению сканирования, при котором ухудшение изображения может быть слишком большим и недопустимым. Соответственно, этот первый метод может распространяться на относительно краткосрочный механизм. При втором методе устройство 105 МРТ может содержать механизм, использующий RPNI посредством вычисления смещения фазы тактового сигнала, которое должно компенсировать фазовую ошибку, например, из-за меняющихся задержек по времени канала беспроводной связи. Опорный сигнал может быть сначала преобразован, передан и возвращен в качестве обратного сигнала, подвергнутого воздействию меняющихся задержек по времени, который обрабатывается, чтобы сформировать RPNI. Устройство 130 визуализации может в дальнейшем вычислить смещение фазы тактового сигнала, которое может должным образом синхронизировать тактовый генератор цифрователя. Соответственно, этот второй способ может относиться к долгосрочной фазовой стабильности между системным тактовым генератором и тактовым генератором приемника.
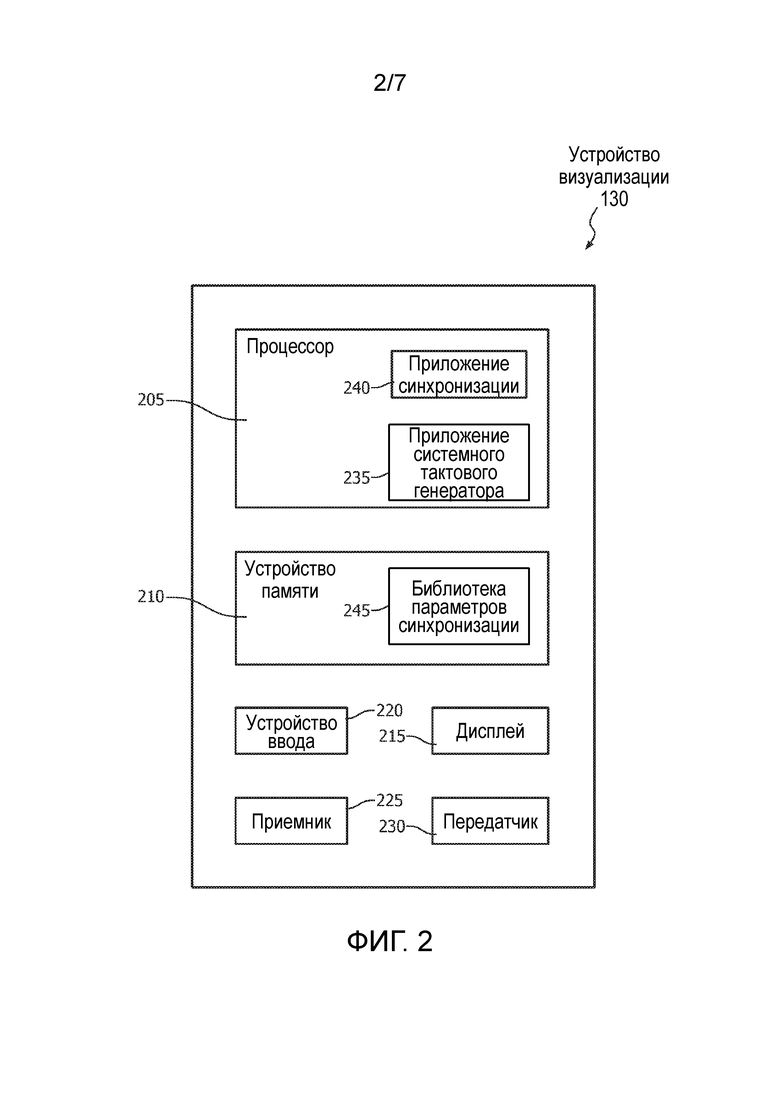
[0022] На фиг. 2 представлено устройство 130 визуализации с фиг. 1, соответствующее примерному варианту осуществления. Как обсуждалось выше, устройство 130 визуализации может быть выполнено с возможностью беспроводной связи с устройством 105 МРТ. Соответственно, устройство 130 визуализации может содержать приемник 225 и передатчик 230. Однако следует заметить, что устройство 130 визуализации может содержать объединенный приемопередатчик для обеспечения функциональных возможностей приемника 225 и передатчика 230. Приемник 225 и передатчик 230 могут быть выполнены для беспроводной связи малой дальности, так как устройство 130 визуализации часто находится в непосредственной близости от устройства 105 МРТ (например, то и другое в помещении 100 для сканирования). Однако, как будет описано ниже в примере, приемник 225 и передатчик 230 могут также быть выполнены с возможностью беспроводной связи дальнего действия, например, с помощью сети.
[0023] Кроме того, как обсуждалось выше, устройство 130 визуализации может быть выполнено с возможностью обеспечения RPNI, который используется устройством 105 МРТ, для синхронизации тактового генератора цифрователя. Устройство 130 визуализации содержит процессор 205 и устройство 210 памяти. Процессор 205 может исполнять приложение 235 системного тактового генератора, которое поддерживает системный тактовый генератор, формируя базис, на котором синхронизируется тактовый генератор цифрователя. В первом случае приложение 235 системного тактового генератора может быть выполнено с возможностью исключительно поддержания стабильности системного тактового генератора. Во втором случае приложение 235 системного тактового генератора может быть выполнено с возможностью использования приемника 225 и передатчика 230, способных осуществлять беспроводную связь, чтобы запрашивать синхронизацию системного тактового генератора. В любом случае, системный тактовый генератор может поддерживать и использоваться для функциональных возможностей синхронизации.
[0024] Процессор 205 может также исполнять приложение 240 синхронизации. Приложение 240 синхронизации может содержать функциональные возможности формирования RPNI, основываясь на приложении 235 системного тактового генератора. RPNI может формироваться приложением 240 тактового генератора и передаваться устройству 105 МРТ через передатчик 230. Как подробно будет описано в дальнейшем, приложение 240 синхронизации может дополнительно формировать фиксированный RPNI, представляющий долгосрочный дрейф фазы между системным тактовым генератором и тактовым генератором приемника. Фиксированный RPNI может основываться на опорном сигнале и информации, определяемой из обратного сигнала, обеспечиваемого устройством 105 МРТ, после обработки опорного сигнала. Устройство 210 памяти может содержать библиотеку 245 параметров синхронизации. Библиотека 245 параметров синхронизации может содержать заранее вычисленные параметры, на которых опорный сигнал должен быть зафиксирован, чтобы сформировать RPNI. Например, библиотека 245 параметров синхронизации может быть таблицей данных, по которой определенная информация обеспечивает необходимые операции для формирования RPNI. Библиотека 245 параметров синхронизации может быть заранее запрограммирована в устройстве 130 визуализации.
[0025] Устройство 130 визуализации может также содержать дисплей 215 и устройство 220 ввода данных. Например, процессор 205 может также исполнять приложение формирования изображения, которое использует данные, принятые от устройства 105 МРТ (через приемник 225), чтобы сформировать изображения сканирования. Эти изображения могут быть показаны на дисплее 215. Устройство 220 ввода данных может принимать вводы от оператора, чтобы управлять работой компонентов 120 МРТ для выбора среза, который должен сканироваться для получения изображения, которое должно быть сформировано.
[0026] На фиг. 3 представлено устройство 105 МРТ с фиг. 1, соответствующее примерным вариантам осуществления. Как обсуждалось выше, устройство 105 МРТ может быть выполнено с возможностью беспроводной связи с устройством 130 визуализации. Соответственно, устройство 105 МРТ может содержать приемник 325 и передатчик 330. Снова следует заметить, что устройство 105 МРТ может также содержать объединенный приемопередатчик, чтобы обеспечивать функциональные возможности приемника 325 и передатчика 330. Приемник 325 и передатчик 330 могут быть предназначены для беспроводной связи малой дальности с устройством 130 визуализации. Хотя маловероятно, что потребуется связь большой дальности, приемник 325 и передатчик 330 также могут быть выполнены для этой задачи.
[0027] Кроме того, как обсуждалось выше, устройство 105 МРТ может быть выполнено с возможностью приема RPNI от устройства 130 визуализации, чтобы компенсировать смещение фазы между тактовым импульсом цифрователя и системным тактовым импульсом. Устройство 105 МРТ содержит процессор 305 и устройство 310 памяти. Процессор 305 может исполнять приложение 335 тактового генератора цифрователя, которое поддерживает тактовый генератор цифрователя и, таким образом, формирует базис, на котором управляются сигналы и гетеродины в градиентных и РЧ катушках беспроводной связи. Таким образом, когда устройство 105 МРТ принимает RPNI, приложение 335 тактового генератора цифрователя может применять его информацию для коррекции фазовой ошибки между тактовым генератором цифрователя и системным генератором тактовых импульсов. Приложение 335 тактового генератора цифрователя может дополнительно обеспечивать обратный сигнал после обработки опорного сигнала, с тем, чтобы мог быть принят RPNI.
[0028] Процессор 305 может также исполнять приложение 345 индикатора. Приложение 345 индикатора может работать совместно с устройством 340 индикатора. Как будет подробно описано в дальнейшем, устройство 340 индикатора может принимать опорный сигнал, чтобы определить рассогласование между тактовым генератором цифрователя и системным тактовым генератором. В зависимости от результата, получаемого от устройства 340 индикатора, приложение 345 индикатора может обеспечивать соответствующую индикацию в отношении достоверности данных при выполнении сканирования, чтобы сформировать изображения на устройстве 130 визуализации.
[0029] Устройство 105 МРТ может также содержать компоненты 120 МРТ, дисплей 315 и устройство 320 ввода данных. Например, перемещая пациента, лежащего на столе 110 для пациента, в канал устройства 105 МРТ, пульт 115 управления может активировать дисплей 315 и устройство 320 ввода данных для должного выставления с изоцентром.
[0030] Как обсуждалось выше, первый способ использования опорного сигнала предназначен для относительно краткосрочного механизма. Конкретно, устройство 340 индикатора может принимать опорный сигнал, чтобы предоставить приложению 345 индикатора информацию о рассогласовании. Следует заметить, что устройство 340 индикатора является только примерным и устройство 105 МРТ может содержать любую комбинацию программного и аппаратурного обеспечения, чтобы предоставлять индикации, описанные ниже. На фиг. 4 представлено устройство 340 индикатора из устройства 105 МРТ для формирования индикации рассогласования тактового генератора цифрователя устройства МРТ в соответствии с примерными вариантами осуществления.
[0031] Специалисты в области техники должны понимать, что существует много способов обнаружения фазового шума. Высокочувствительный и точный способ может быть реализован на оборудовании для тестирования фазового шума при измерении фазового шума в беспроводных системах, которые разрабатываются для достижения максимальной чувствительности фазового шума в очень большом частотном диапазоне. Как обсуждалось выше, в отношении катушек беспроводной связи в устройстве 105 МРТ существует несколько различий между сигналами беспроводных систем и беспроводных устройств МРТ, таких как устройство 105 МРТ. Например, для катушек беспроводной связи в устройстве 105 МРТ представляет интерес фазовый шум одиночного синусоидального сигнала. Этот сигнал даже не обязательно должен быть непосредственно реальным тактовым сигналом аналого-цифрового преобразователя (ADC), а может также быть сигналом, умноженным по частоте. То есть, при умножении частоты фазовый шум увеличивается линейно с произведением. Например, если сигнал на частоте 50 МГц с джиттером 1 градус умножается на коэффициент 10, то получается сигнал на частоте 500 МГц джиттером 10 градусов. Таким образом, специалисты в области техники должны признать, что измерять фазовый шум на умноженной частоте тактового сигнала предпочтительнее из-за повышенной чувствительности.
[0032] Устройство 340 индикатора может содержать компоненты, выполненные с этой целью. Конкретно, устройство 340 индикатора может обнаруживать отклонение фазы или фазу, умножая сигнал на ортогональный ему сигнал. Хотя тактовый генератор цифрователя может быть выполнен с возможностью однозначно отслеживать сигнал системного тактового генератора, в результате существует некоторое рассогласование, особенно за большой промежуток времени и/или при наличии помехи (например, пациент движется). Когда тактовый генератор цифрователя полностью синхронизирован с системным тактовым генератором, который не имеет джиттера, произведение ортогонального сигнала с исходным сигналом равно нулю, что указывает на отсутствие рассогласования. Например, для колебаний, демонстрирующих чисто синусоидальный сигнал, для которых ортогональный сигнал является чисто косинусоидальным сигналом, эти две волны уничтожают друг друга. Однако когда рассогласование существует, синусоидальный сигнал изменяется так, что ортогональный сигнал дает в результате некоторое ненулевое значение.
[0033] Для осуществления этого устройство 340 индикатора содержит умножитель 405 частоты, на который подается опорный сигнал. Следует заметить, что умножитель 405 частоты является лишь примерным и не является обязательным. Причины введения умножителя частоты обсуждались выше. В дальнейшем, сигнал посылается на делитель 410, формирующий первый сигнал, который посылается на умножитель 420, и второй идентичный сигнал, который посылается на фазосдвигающее устройство 415. Чтобы получить ортогональный сигнал, фазосдвигающее устройство 415 может сместить фазу на 90 градусов. Фазосдвигающее устройство 415 посылает ортогональный сигнал на умножитель 420. После умножения результат посылается на фильтр 425 нижних частот (LP), так чтобы умноженный по частоте сигнал был подавлен для детектора 430, чтобы получить на выходе значение рассогласования. Опять, если сигнал и ортогональный сигнал действительно ортогональны (то есть, джиттер отсутствует), то их произведение равно нулю. Однако, при наличии какого-либо джиттера опорного сигнала, это вызывает остаточный сигнал, указывающим на принятый фазовый шум.
[0034] Приложение 345 индикатора устройства 105 МРТ может принять остаточный сигнал от устройства 340 индикатора. Обращаясь к библиотеке параметров индикатора, приложение 345 индикатора может определить достоверность данных, полученных при выполнении сканирования. Библиотека параметров индикатора может определить множество диапазонов, в которых отклонение соответствует отклонению остаточного сигнала. В первом диапазоне от нуля до первого значения остаточный сигнал может быть пренебрежимо малым, чтобы достоверность данных была удовлетворительной для формирования изображения. Во втором диапазоне от первого значения до второго значения остаточный сигнал может быть достаточно большим, чтобы влиять на формирование изображения. При таком сценарии приложение 345 индикатора может обеспечить на дисплее 215 и/или 315 индикацию, что данные могут не быть достоверными по сравнению с тем, когда остаточный сигнал находится в пределах первого диапазона. В третьем диапазоне от второго значения до максимального значения остаточный сигнал может быть достаточно большим, чтобы формирование изображения было недостоверным. В таком сценарии приложение 345 индикатора может обеспечивать на дисплее 215 и/или 315 индикацию, что данные могут быть недостоверными. Приложение 345 индикатора может также обладать и другими функциональными возможностями. Например, приложение 345 индикатора может передавать сигнал, который деактивирует устройство 105 МРТ. В другом примере приложение 345 индикатора может передавать уведомление техническому специалисту, чтобы заставить его заняться рассогласованием.
[0035] Следует заметить, что относительно краткосрочный механизм первого метода может быть использован множеством путей. Например, этот метод обеспечивает экономически эффективный путь определения фазового шума. Устройство 340 индикатора и/или приложение 345 индикатора могут быть введены внутрь устройства 105 МРТ или могут быть модульными и отдельно присоединяться к устройству 105 МРТ. Соответственно, первый способ может быть легко введен в устройство МРТ, используя катушки беспроводной связи, которые еще не обладают функциональными возможностями беспроводной синхронизации. Посредством первого способа проводное соединение может быть использовано в дальнейшем, когда остаточный сигнал указывает необходимость синхронизации тактового генератора цифрователя. В другом примере это может использоваться в сочетании со вторым способом, который описывается ниже.
[0036] Как обсуждалось выше, второй способ использования RPNI предназначен для относительно долгосрочного механизма. Конкретно, приложение 240 синхронизации может передавать опорный сигнал, чтобы принимать обратный сигнал от устройства 105 МРТ, чтобы определить RPNI, который синхронизирует тактовый генератор цифрователя устройства 105 МРТ с системным тактовым генератором устройства 130 визуализации. Следует заметить, что устройство 130 визуализации является только лишь примерным и этот компонент или любой другой компонент может использоваться для обеспечения функциональных возможностей, описанных ниже. На фиг. 5 показана последовательность 500 выполнения синхронизации для настройки тактового генератора цифрователя устройства 105 МРТ в соответствии с примерными вариантами осуществления. Следует также заметить, что последовательность 500 выполнения синхронизации также является только лишь примерной и может использоваться любая операция для определения фиксации опорного сигнала при формировании RPNI. Например, ниже, со ссылкой на фиг. 8, будет описан более конкретный вариант осуществления последовательности выполнения синхронизации.
[0037] Последовательность 500 проведения синхронизации использует коррекцию фазовой ошибки при передаче сигнала туда и обратно. При передаче сигнала туда и обратно любая переменная фазовая ошибка в канале 505 между устройством 130 визуализации и устройством 105 МРТ появляется дважды во время передачи опорного сигнала туда и обратно. Таким образом, измерение дрейфа фазы сигнала при передаче сигнала туда и обратно в устройстве 130 визуализации и деление его пополам дает информацию о дрейфе фазы в устройстве 105 МРТ. Эта информация может в дальнейшем использоваться при формировании RPNI для коррекции любой фазовой ошибки из-за тактового генератора цифрователя устройства 105 МРТ, не синхронизированного с системным тактовым генератором.
[0038] Приложение 235 системного тактового генератора устройства 130 визуализации может содержать функциональные возможности преобразования частоты, тогда как приложение 335 тактового генератора цифрователя устройства 105 МРТ может содержать функциональные возможности обратного преобразования частоты. Как обсуждалось выше, устройство 105 МРТ может содержать систему PLL, которая использует опорный сигнал для формирования умножения такой частоты, которая может также делиться для ее понижения. Соответственно, функциональные возможности преобразования частоты могут содержать сначала умножение опорного сигнала на первое значение, чтобы получить первый результирующий сигнал, и далее деление первого результата на второе значение, чтобы получить второй результирующий сигнал. Этот второй результирующий сигнал может быть выведен и передан через передатчик 230 устройства 130 визуализации. Второй результирующий сигнал может быть передан по каналу 505, в котором в выходной результат вводится переменная задержка по времени, чтобы получить измененный второй результирующий сигнал. Переменная задержка по времени может включать множество компонент. Например, переменная задержка по времени может содержать задержку, добавленную каналом 505, ошибку дрейфа, добавленную к сигналу, их комбинацию и т. д.
[0039] При попытке синхронизации тактового генератора цифрователя устройство 105 МРТ может выполнять на принятом измененном втором результирующем сигнале функцию обратного преобразования частоты. Таким образом, функциональные возможности обратного преобразования частоты могут содержать сначала умножение измененного второго результирующего сигнала на второе значение, чтобы получить третий результирующий сигнал, и деление третьего результирующего сигнала на первое значение, чтобы получить четвертый результирующий сигнал. Четвертый результирующий сигнал может использоваться приложением тактового генератора цифрователя, чтобы синхронизировать тактовый генератор цифрователя.
[0040] Однако, примерные варианты осуществления могут обеспечивать на измененном втором результирующем сигнале выполнение дополнительной операции преобразования частоты. Конкретно, измененный второй результирующий сигнал умножается на третье значение, чтобы получить пятый результирующий сигнал, и делится на четвертое значение, чтобы получить шестой результирующий сигнал. Шестой результирующий сигнал может передаваться по каналу 505, в котором переменная задержка по времени снова вводится в выходной сигнал, получая измененный шестой результирующий сигнал. Таким образом, при передаче сигнала туда и обратно переменная задержка по времени была добавлена дважды.
[0041] Устройство 130 визуализации может обработать измененный шестой результирующий сигнал, чтобы определить фиксацию, которая должна применяться к RPNI для тактового генератора цифрователя, синхронизируемого с системным тактовым генератором. То есть, фиксация может исключать любой джиттер, фазовую ошибку и т. д. Конкретно, деление пополам результирующей переменной задержки по времени обеспечивает необходимую информацию для приложения 240 синхронизации, чтобы определить фиксацию. RPNI, который передавался первоначально, мог быть достаточным, когда в наличии имелось проводное соединение. Однако при введении переменной задержки по времени приложение 240 синхронизации может формировать RPNI, который учитывает переменную задержку по времени так, что даже после передачи переменной задержки по времени по каналу 505, приложение 335 тактового генератора цифрователя может использовать RPNI, чтобы синхронизировать тактовый генератор цифрователя с системным тактовым генератором.
[0042] В конкретном варианте осуществления опорный сигнал 





[0043] Как обсуждалось выше, на фиг. 8 представлен конкретный вариант осуществления фильтра синхронизации и сопутствующих компонент. Конкретно, на фиг. 8 показана конкретная последовательность 800 выполнения синхронизации для настройки тактового генератора цифрователя устройства 105 МРТ в соответствии с примерными вариантами осуществления. По существу, так же, как и последовательность 500 выполнения синхронизации с фиг. 5, последовательность 800 выполнения синхронизации относится к коррекции фазовой ошибки при передаче сигнала туда и обратно. То есть, сигнал может формироваться устройством 130 визуализации, затем принимается устройством 105 МРТ, в котором устройство 105 МРТ 105 «обрабатывает» сигнал, чтобы сформировать обратный сигнал. Обратный сигнал может использоваться устройством 130 визуализации для определения коррекции фазовых искажений, которая должна применяться к любым сигналам, передаваемым от устройства 130 визуализации к устройству 105 МРТ. Конкретно, представленный выше механизм, описанный в отношении последовательности 500 выполнения синхронизации, может быть использован снова в отношении последовательности 800 синхронизации.
[0044] Как показано на чертеже, последовательность 800 выполнения синхронизации может снова содержать устройство 130 визуализации и устройство 105 МРТ. Хотя устройство 130 визуализации и устройство 105 МРТ и соответствующие компоненты были описаны выше, последовательность 800 выполнения синхронизации снова описывает эти компоненты, но в отношении описанного здесь конкретного варианта осуществления. Таким образом, устройство 130 визуализации может содержать гетеродин (OSC) 805, полосовой фильтр 810, приемопередатчик 815, заграждающий фильтр 820, схему 825 Костаса, фазовый компаратор 830 и получать в результате значение 835 коррекции фазы. Устройство 105 МРТ может содержать приемопередатчик 840, полосовой фильтр 845, схему 850 Костаса, гетеродин с программным управлением (NCO) 855, цифро-аналоговый преобразователь (DAC) 860 и заграждающий фильтр 865.
[0045] Специалисты в области техники должны понимать функциональные возможности, связанные с компонентами устройства 130 визуализации и устройства 105 МРТ. Например, полосовой фильтр может быть устройством, пропускающим сигналы с частотами в пределах заданного диапазона и подавляющим сигналы с другими частотами, тогда как заграждающий фильтр обеспечивает практически противоположные функциональные возможности. В другом примере схема Костаса может быть конкретной схемой на базе PLL, используемой для выделения фазы несущей из сигналов с подавленной модуляцией несущей. В дополнительном примере NCO может быть генератором цифрового сигнала, создающим синхронное, дискретное во времени, дискретное по значению представление формы сигнала (например, синусоидального).
[0046] Как проиллюстрировано, OSC 805 может быть предназначен для генерирования сигналов на заданной частоте, такой как 10 МГц. Первоначально, этот сигнал с частотой 10 МГц до передачи приемопередатчиком 815 устройству 105 визуализации может быть пропущен через полосовой фильтр 810. Таким образом, приемопередатчик 840 устройства 105 МРТ может принимать сигнал от устройства 130 визуализации на частоте 10 МГц. Принятый сигнал с частотой 10 МГц может быть пропущен через полосовой фильтр 845 перед его обработкой на схеме 850 Костаса. После обработки сигнал может подаваться на NCO 855. NCO 855 может вывести созданный сигнал, такой, который может быть на ±1 МГц выше и ниже входного сигнала с частотой 10 МГц. То есть, DAC 860 может принимать сигнал с частотой 9 МГц и 11 МГц. Эти сигналы могут проходить через заграждающий фильтр 865, прежде чем будут переданы приемопередатчиком 840 обратно к устройству 130 визуализации. Таким образом, оба сигнала, проходящие по каналу от приемопередатчика 815 к приемопередатчику 840 и обратно от приемопередатчика 840 к приемопередатчику 815 центрируются на частоте 10 МГц, и поэтому оба сигнала будут подвергаться одной и той же задержке канала, которая соответствует переменному свойству канала для этой частоты.
[0047] Когда устройство 130 визуализации принимает обратные сигналы на частотах 9 МГц и 11 МГц от устройства 105 МРТ через приемопередатчик 815, эти сигналы могут перед обработкой в схеме 825 Костаса проходить через заграждающий фильтр 820. Фазовый компаратор 830 может принимать выходной сигнал от схемы 825 Костаса, а также принимать исходный сигнал от гетеродина 805, который может служить опорным сигналом для определения значения 835 коррекции фазы. Таким образом, может быть определено значение 835 коррекции фазы, которое может использоваться для синхронизации тактового генератора цифрователя с системным тактовым генератором.
[0048] На фиг. 6 показан способ 600 индикации рассогласования тактового генератора цифрователя устройства 105 МРТ в соответствии с примерными вариантами осуществления. Способ 600 относится к первому методу, в котором обеспечен относительно краткосрочный механизм для формирования индикации достоверности данных, полученных при выполнении сканирования, на основании текущих условий, существующих для тактового генератора цифрователя. Способ 600 будет описан со ссылкой на устройство 105 МРТ, устройство 340 индикатора и приложение 345 индикатора.
[0049] На этапе 605 устройство 105 МРТ принимает опорный сигнал. Конкретно, посредством приемника 325 умножитель 405 частоты устройства 340 индикатора принимает опорный сигнал. На этапе 610 опорный сигнал с умноженной частотой разделяют на два идентичных сигнала, первый из которых посылается на умножитель 420. На этапе 615 второй разделенный сигнал подается на фазосдвигающее устройство 415 так, что фазу смещается ортогонально исходному сигналу. Как обсуждалось выше, фазосдвигающее устройство 415 может иметь различные значения сдвига фазы, такие как π/2+N*π, где N - положительное целое число, причем большее значение N приводит в результате к более длительной задержке по времени между двумя сигналами. Таким образом, могут тестироваться различные участки спектра фазового шума. Однако следует заметить, что может быть трудно сформировать значительно длительные задержки по фазе между двумя разделенными сигналами, в частности, фазовый дрейф, который происходит за длительный период времени (например, секунды - минуты), может требовать другого механизма. Такой другой механизм может быть зондированием долгосрочного дрейфа фазы, способ, который подробно обсуждается ниже, как компенсация фазовой ошибки при прохождении сигнала туда и обратно. На этапе 620 ортогональный сигнал также посылается на умножитель, так чтобы исходный сигнал и ортогональный сигнал перемножались. В дальнейшем, выходной сигнал может посылаться на фильтр 425 нижних частот и детектор 430.
[0050] На этапе 625 приложение 345 индикатора принимает произведение и определяет, существует ли остаточный сигнал. Как обсуждалось выше, если тактовый генератор цифрователя должным образом синхронизирован с системным тактовым генератором, джиттер отсутствует, в результате произведение равно нулю. Таким образом, когда остаточный сигнал не существует, приложение 345 индикатора продолжает выполнение способа 600, переходя к этапу 630, на котором обеспечивается индикация отсутствия фазового шума, например, на дисплее 215 и/или 315. Такая индикация может указывать, что данные, используемые для формирования изображений, очень достоверны.
[0051] Возвращаясь к этапу 625, если приложение 345 индикатора определяет, что остаточный сигнал существует, оно продолжает способ 600, переходя к этапу 635. На этапе 635 приложение 345 индикатора определяет, превышает ли остаточный сигнал заданный порог, который может храниться в библиотеке 350 параметров индикатора. Если остаточный сигнал существует, но ниже заданного порога, приложение 345 индикатора продолжает способ 600, переходя к этапу 640. На этапе 640 приложение 345 индикатора обеспечивает индикацию, что фазовый шум существует, но находится в допустимых пределах, при которых данные, используемые для формирования изображения, все еще достоверны. Однако если остаточный сигнал существует и превышает заданный порог, приложение 345 индикатора продолжает способ 600, переходя к этапу 645. На этапе 645 приложение 345 индикатора обеспечивает индикацию, что существует значительный фазовый шум и что данные, используемые для формирования изображения, недостоверны.
[0052] Следует заметить, что способ 600 может содержать дополнительные этапы. Например, как обсуждалось выше, когда индикация фазового шума в остаточном сигнале выше заданного порога, приложение 345 индикатора может выполнить множество последующих действий, таких как деактивация устройства 105 МРТ, обращение к обслуживающему техническому специалисту и т. д. В другом примере, обсуждавшемся выше, для остаточного сигнала могут иметься многочисленные пороги.
[0053] На фиг. 7 представлен способ 700 настройки тактового генератора цифрователя устройства 105 МРТ, соответствующий примерным вариантам осуществления. Способ 700 относится ко второму случаю, в котором обеспечивается относительно долгосрочный механизм, чтобы сформировать фиксированный сигнал RPNI, который синхронизирует тактовый генератор цифрователя с системным тактовым генератором, так чтобы данные, полученные при выполнении сканирования, были достоверны для формирования изображений. Способ 700 будет описан со ссылкой на устройство 105 МРТ и устройство 130 визуализации.
[0054] На этапе 705 устройство 130 визуализации формирует опорный сигнал, основываясь на системном тактовом генераторе, поддерживаемом приложением 235 системного тактового генератора. Конкретно, приложение 240 синхронизации может формировать опорный сигнал. На этапе 710 приложение 240 синхронизации преобразует частоту опорного сигнала. Как обсуждалось ранее, операция преобразования частоты может повлечь за собой первое умножение на первый коэффициент, а затем деление на второй коэффициент, как это делается при PLL. На этапе 715 устройство 130 визуализации передает преобразованный опорный сигнал посредством передатчика 230 к устройству 105 МРТ.
[0055] Во время передачи по каналу 505 преобразованный опорный сигнал может подвергаться переменной задержке по времени. Как обсуждалось выше, такая переменная задержка по времени может содержать задержку канала, погрешность дрейфа и т. д. Таким образом, преобразованный опорный сигнал может быть передан первым способом, но приниматься вторым способом. Таким образом, на этапе 720 устройство 105 МРТ принимает посредством приемника 325 преобразованный опорный сигнал с переменной задержкой по времени. На этапе 725 приложение 335 тактового генератора цифрователя устройства 105 МРТ преобразует задержанный преобразованный опорный сигнал. Как обсуждалось выше, последующая операция преобразования частоты может повлечь за собой первое умножение на третий коэффициент, а затем деление на четвертый коэффициент. На этапе 730 устройство 105 МРТ посредством передатчика 330 передает повторно преобразованный опорный сигнал к устройству 130 визуализации.
[0056] Во время передачи повторно преобразованный опорный сигнал может снова подвергнуться переменной задержке по времени канала 505. Таким образом, повторно преобразованный опорный сигнал может быть передан первым способом, но приниматься вторым способом. Таким образом, на этапе 735 устройство 130 визуализации посредством приемника 225 принимает повторно преобразованный опорный сигнал, который подвергся переменной задержке по времени. В итоге, переменная задержка по времени применяется дважды. На этапе 740 устройство 130 визуализации выполняет обратное преобразование частоты для всех преобразований.
[0057] На этапе 745 устройство 130 визуализации определяет рассогласование по опорному сигналу, передаваемому по контуру. Конкретно, рассогласование может основываться на половине полной переменной задержки по времени, примененной к принимаемому обратному сигналу. На этапе 750 устройство 130 визуализации определяет фиксацию, которая должна быть применена к опорному сигналу, так чтобы переменная задержка по времени была удалена при передаче к устройству 105 МРТ. То есть, приложение 240 синхронизации формирует RPNI. На этапе 755 устройство 130 визуализации передает RPNI устройству 105 МРТ. На этапе 760 устройство 105 МРТ принимает RPNI, подвергнутый переменной задержке по времени в канале 505. Следует заметить, что устройство визуализации может альтернативно использовать RPNI и скорректировать смещение фазы фактических данных МРТ, когда данные МРТ передаются от устройства 105 МРТ к устройству 130 визуализации. Тем не менее, RPNI конфигурирован для этой переменной задержки по времени. Таким образом, на этапе 765 приложение 335 тактового генератора цифрователя устройства 105 МРТ синхронизирует тактовый генератор цифрователя с системным тактовым генератором.
[0058] В соответствии с примерными вариантами осуществления система и способ в примерных вариантах осуществления обеспечивают в устройстве МРТ механизм, использующий катушки беспроводной связи, чтобы обрабатывать опорный сигнал, получаемый от устройства визуализации. Устройство МРТ может обрабатывать опорный сигнал, чтобы определять рассогласование между системным тактовым генератором и тактовым генератором цифрователя, такое как введение джиттера. Рассогласование может использоваться в качестве базиса для формирования индикации достоверности данных, полученных при выполнении сканирования для формирования изображений. Устройство МРТ может также обрабатывать опорный сигнал посредством преобразований частоты и обеспечивать обратный сигнал для устройства визуализации. Используя передачу сигнала туда и обратно и подвергая переменной задержке по времени дважды, т.е. при первом прохождении через канал от устройства визуализации к устройству МРТ, а затем при повторном прохождении через канал от устройства МРТ к устройству визуализации, устройство визуализации может формировать принятый сигнал индикатора фазового шума, основываясь на определенной задержке, так что тактовый генератор цифрователя может быть должным образом синхронизирован, а фаза выставлена с системным тактовым генератором. Таким образом, данные, полученные при выполнении сканирования, при формировании изображений могут быть более достоверными.
[0059] Специалисты в области техники должны понимать, что описанные выше примерные варианты осуществления могут быть реализованы любым количеством способов, в том числе, отдельными программными модулями, такими как совокупность аппаратного и программного обеспечения и т. д. Например, формирование модели пациента может быть программой, содержащей строки программы, которые, будучи скомпилированными, могут быть исполнены на процессоре.
[0060] Для специалистов в области техники должно быть очевидно, что в настоящем изобретении могут быть сделаны различные модификации, не отступая от сущности или объема изобретения. Таким образом, подразумевается, что настоящее изобретение охватывает модификации и изменения настоящего изобретения, если они попадают в рамки приложенной формулы изобретения и ее эквивалента.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ БЕСПРОВОДНОЙ СВЯЗИ ДЛЯ СИСТЕМ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ (МРТ) | 2016 |
|
RU2728328C2 |
| РЕГУЛИРУЕМАЯ ТАКТОВАЯ ЧАСТОТА В БЛОКЕ ИНЪЕКЦИОННОЙ ГОЛОВКИ ДЛЯ СИСТЕМЫ МРТ | 2018 |
|
RU2773374C2 |
| МЕДИЦИНСКИЙ ИНТЕРФЕЙС СЛЕЖЕНИЯ, ОБЕСПЕЧИВАЮЩИЙ ИНТЕРВЕНЦИОННУЮ ИНФОРМАЦИЮ | 2013 |
|
RU2635289C2 |
| ПРОТОКОЛ СВЯЗИ ДЛЯ СИНХРОНИЗАЦИИ АНИМАЦИОННЫХ СИСТЕМ | 2004 |
|
RU2363050C2 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ СЧЁТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СТАТИЧЕСКИЙ | 2018 |
|
RU2695451C1 |
| БЕСПРОВОДНОЙ МАРКЕР ПЕРСПЕКТИВНОГО ДВИЖЕНИЯ | 2012 |
|
RU2604702C2 |
| Устройство дистанционного зондирования подповерхностных слоев почвы | 1989 |
|
SU1684770A1 |
| СПОСОБ СИНХРОНИЗАЦИИ УЗЛОВ СЕТИ, СИСТЕМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2476996C2 |
| СХЕМА УМЕНЬШЕНИЯ ЗАДЕРЖКИ ПРИ ПЕРЕДАЧЕ БУФЕРИЗОВАННЫХ ДАННЫХ МЕЖДУ ДВУМЯ ВЗАИМНО АСИНХРОННЫМИ ШИНАМИ | 1996 |
|
RU2176814C2 |
| ИНДИКАТОР ВРЕМЕНИ СКАНИРОВАНИЯ ЛУЧА | 2015 |
|
RU2679599C1 |






Группа изобретений относится к медицинской технике, а именно к средствам визуализации внутренних органов тела. Способ обнаружения фазового шума при формировании изображения магнитно-резонансной томографии содержит этапы, на которых принимают устройством магнитно-резонансной томографии (МРТ) исходный опорный сигнал от устройства визуализации, причем устройство МРТ использует катушки беспроводной связи, распространяющие сигналы изображения на основании тактового генератора цифрователя, чтобы получить данные изображения, используемые устройством визуализации для формирования изображения МРТ, сформированный на основании системного тактового генератора, которым желательно распространять сигналы изображения, разделяют устройством МРТ исходный опорный сигнал на первый и второй опорные сигналы, регулируют устройством МРТ фазовый сдвиг второго опорного сигнала, чтобы сформировать ортогональный опорный сигнал, определяют устройством МРТ произведение первого опорного сигнала с ортогональным опорным сигналом, и определяют устройством МРТ индикацию, указывающую достоверность данных изображения, на основании произведения. Устройство магнитно-резонансной томографии (МРТ) содержит тактовый генератор цифрователя, катушки беспроводной связи, распространяющие сигналы изображения на основании тактового генератора цифрователя, чтобы получить данные изображения, приемник, выполненный с возможностью принимать исходный опорный сигнал от устройства визуализации, сформированный на основании системного тактового генератора, и процессор. Использование изобретений позволяет синхронизировать тактовый генератор цифрователя устройства магнитно-резонансной томографии (МРТ) с системным тактовым генератором устройства визуализации, что обеспечивает более точное выполнение сканирования. 2 н. и 13 з.п. ф-лы, 8 ил.
1. Способ (600) обнаружения фазового шума при формировании изображения магнитно-резонансной томографии, содержащий этапы, на которых:
принимают (605) устройством (105) магнитно-резонансной томографии (МРТ) исходный опорный сигнал от устройства (130) визуализации, причем устройство (105) МРТ использует катушки беспроводной связи, распространяющие сигналы изображения на основании тактового генератора цифрователя, чтобы получить данные изображения, используемые устройством (130) визуализации для формирования изображения МРТ, сформированный на основании системного тактового генератора, которым желательно распространять сигналы изображения;
разделяют (610) устройством (105) МРТ исходный опорный сигнал на первый и второй опорные сигналы;
регулируют (615) устройством (105) МРТ фазовый сдвиг второго опорного сигнала, чтобы сформировать ортогональный опорный сигнал;
определяют (620) устройством (105) МРТ произведение первого опорного сигнала с ортогональным опорным сигналом; и
определяют (625) устройством (105) МРТ индикацию, указывающую достоверность данных изображения, на основании произведения.
2. Способ (600) по п. 1, причем произведение равно нулю, а индикация равна первому значению достоверности, указывающему, что изображение МРТ сформировано точно на основании данных изображения.
3. Способ (600) по п. 2, причем произведение больше нуля, но меньше заданного порога, а индикация равна второму значению достоверности, которое ниже, чем первое значение достоверности.
4. Способ (600) по п. 3, причем произведение больше заданного порога, а индикация равна третьему значению достоверности, которое ниже, чем второе значение достоверности.
5. Способ (600) по п. 1, причем опорный сигнал принимают по каналу (505), в котором опорный сигнал передают от устройства (130) визуализации в первой форме и принимают устройством (105) МРТ во второй форме.
6. Способ (600) по п. 5, причем ухудшение в канале (505) основано на движении пациента в канале устройства (105) МРТ.
7. Способ (600) по п. 5, причем ухудшение в канале (505) основано на искажении в канале (505).
8. Способ (600) по п. 1, дополнительно содержащий этап, на котором:
перед разделением (610) умножают устройством (105) МРТ частоту опорного сигнала, чтобы увеличить чувствительность при определении (625) индикации.
9. Способ (600) по п. 8, дополнительно содержащий этап, на котором:
перед определением произведения (620) фильтруют устройством (105) МРТ нижние частоты умноженной частоты, чтобы подавить опорный сигнал.
10. Устройство (105) магнитно-резонансной томографии (МРТ), содержащее:
тактовый генератор цифрователя;
катушки беспроводной связи, распространяющие сигналы изображения на основании тактового генератора цифрователя, чтобы получить данные изображения;
приемник, выполненный с возможностью принимать исходный опорный сигнал от устройства (130) визуализации, сформированный на основании системного тактового генератора, которым желательно распространять сигналы изображения; и
процессор (305), выполненный с возможностью:
разделения (610) исходного опорного сигнала на первый и второй опорные сигналы;
фазового сдвига (615) второго опорного сигнала для формирования ортогонального опорного сигнала;
определения (620) произведения первого опорного сигнала с ортогональным опорным сигналом; и
определения (625) индикации, указывающей достоверность данных изображения, на основании произведении.
11. Устройство МРТ по п. 10, причем произведение является по меньшей мере одним выбранным из группы: ноль и индикация равна первому значению достоверности, указывающему, что изображение МРТ сформировано точно на основании данных изображения; больше нуля, но меньше заданного порога, и индикация равна второму значению достоверности, которое ниже, чем первое значение достоверности; и больше заданного порога и индикация равна третьему значению достоверности, которое ниже, чем второе значение достоверности.
12. Устройство МРТ по п. 11, причем опорный сигнал принимается по каналу (505), в котором опорный сигнал передается от устройства (130) визуализации в первой форме и принимается устройством (105) МРТ во второй форме.
13. Устройство МРТ по п. 12, причем ухудшение канала (505) основано на движении пациента в канале устройства (105) МРТ или на искажении в канале (505).
14. Устройство МРТ по п. 10, причем перед разделением (610) сигнала процессор умножает частоту опорного сигнала, чтобы повысить чувствительность при определении (625) индикации.
15. Устройство МРТ по п. 14, причем перед определением произведения (620) устройство МРТ отфильтровывает нижние частоты умноженной частоты, чтобы подавить опорный сигнал.
| US 2013127465 A1, 23.05.2013 | |||
| US 2010260293 A1, 14.10.2010 | |||
| US 2010117649 A1, 13.05.2010 | |||
| US 2010327940 A1, 30.12.2010 | |||
| CN 103529409 A, 22.01.2014 | |||
| Valentina Hartwig et al | |||
| A theory for the estimation of SNR degradation caused by clock jitter in MRI systems, Concepts in Magnetic Resonance, Part B (Magnetic Resonance Engineering), Volume 31B, Issue 1, February 2007, pp | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| УСТРОЙСТВО И СПОСОБ МАГНИТНОГО РЕЗОНАНСА | 2007 |
|
RU2435170C2 |
| МРТ С ГИПЕРПОЛЯРИЗАЦИОННЫМ УСТРОЙСТВОМ, ИСПОЛЬЗУЮЩИМ ФОТОНЫ С ОРБИТАЛЬНЫМ УГЛОВЫМ МОМЕНТОМ | 2010 |
|
RU2526895C2 |

