Изобретение относится к грузовым парашютным системам и предназначено для использования в системах десантирования военных грузов, и, в основном, в системах спасения целиком летательных аппаратов или спасения частей летательных аппаратов.
Известны системы спасения самолетов с помощью одного или нескольких парашютов достаточной общей несущей способности, см., например пат России №№2018466 и 2111899. Как правило, такие системы имеют рифление основного парашюта, чтобы избежать резкого рывка при открытии купола основного парашюта, который может угрожать его целостности, и приводит к неприятным перегрузкам экипажа при его наличии на спускаемом объекте. Основной парашют вместе с вытяжным выстреливаются из своего отсека с помощью пирозаряда, или вытягивается ракетным двигателем, или основной парашют вытягивается вместе со своей капсулой вытяжным парашютом. Эти системы имеют существенный недостаток - большую высоту гарантированного спасения.
Допустим, самолет летит на достаточно безопасной высоте - 250 метров. Допустим, у него ломается консоль крыла. Время реакции летчика для принятия решения - 2 сек (по данным психологов). Но самолет в это время уже неконтролируемо вращается - одна консоль крыла своей подъемной силой создает мощный вращающий момент. Время приведения самолета в положение, при котором парашют будет направлен в верхнюю полусферу - допустим, 2 сек. Более того, в положении, когда самолет находится «вверх ногами», подъемная сила крыла направлена вниз и разгоняет самолет к земле. После включения парашютной системы требуется время на вытягивание и раскрытие купола - в зависимости от величины купола, допустим - 2 сек. Итого, только через 6 сек после аварии парашют начнет тормозить падающий самолет. За это время самолет наберет вертикальную скорость вниз около 70 м/сек и потеряет около 180-200 м. высоты. То есть на высоте 50-70 метров он будет падать с вертикальной скоростью 70 м/сек, и через секунду упадет. Спасение невозможно.
Если возникли неисправности, не связанные с поломкой консоли крыла, то спасение возможно со значительно меньшей высоты. В частности, при отказе двигателя или управления, например, при столкновении с птицей, возможно спасение с высоты порядка нескольких десятков метров. В этих случаях система с вытягиванием основного парашюта вытяжным парашютом значительно проигрывает системам с принудительной доставкой парашюта вверх относительно самолета - то есть системам с выстреливанием парашюта или с вытягиваем его ракетным двигателем. Но и эти системы бесполезны на меньших высотах. Например, на взлете, на высоте 5 метров отказал мотор. Допустим, посадка планированием невозможна из-за рельефа местности. Времени реакции летчика хватит, чтобы включить парашютную систему, но из-за сравнительно большого времени раскрытия купола любая система сможет только несколько уменьшить горизонтальную скорость. На вертикальную же скорость система не успеет оказать заметного влияния.
Задача и технический результат изобретения - спасение самолета на высотах, меньших, чем аналоги, то есть на режимах взлета и посадки путем ускорения раскрытия парашюта на 100% системой управления..
ВАРИАНТ 1. Для этого необходимо доставить парашют в наивысшую точку прямо над самолетом. Существующие аналогичные системы выстреливают или вытягивают парашют вверх-назад. Но
парашют при вытягивании сносится встречным потоком и оказывается в момент раскрытия позади самолета. Чтобы парашют начал раскрываться в наивысшей точке над самолетом, его надо выстреливать пиротехническим зарядом или вытягивать ракетным двигателем в направлении вверх-вперед под углом 1-45 градусов (оптимально 15-20 градусов).
Чтобы не поранить кого-нибудь на земле, и чтобы способствовать более быстрому раскрытию парашюта, капсула привязана к центральной части купола парашюта шнуром ограниченной прочности (если рывок все же окажется слишком сильным, шнур порвется, но парашют не повредится).
Работает такая система аналогично существующим, но парашют раскрывается в наивысшей точке.
ВАРИАНТ 2. Также для быстрейшего раскрытия парашюта надо как можно быстрее доставить его в наивысшую точку. Для этого парашюту надо придать бо‛льшую начальную скорость. Но придать такую скорость одним выстрелом в отведенных для системы небольших габаритах невозможно - нагрузки на крепление системы и на фюзеляж самолета будут неприемлемо большими. Для придания большой начальной скорости система имеет телескопическое выстреливающее устройство в виде нескольких телескопических цилиндров, входящих один в другой. Это позволит в несколько раз увеличить длину разгона капсулы с парашютом.
Устройство может быть надкалиберным, то есть диаметры телескопических цилиндров больше максимального диаметра капсулы и последовательно увеличиваются. А может быть подкалиберным, то есть диаметры телескопических цилиндров существенно меньше минимального диаметра капсулы. Причем в последнем случае система может иметь одну группу телескопических цилиндров, расположенную по центру капсулы, а может иметь две и более групп телескопических цилиндров, расположенные по периферии парашютной капсулы.
Так как такая сравнительно длинная группа телескопических цилиндров будет изгибаться встречным потоком воздуха, то во избежание ее перекоса и заклинивания может потребоваться применить шарнирное крепление телескопических цилиндров к фюзеляжу самолета.
А для предотвращения разрыва цилиндров внутренним давлением полость цилиндров может иметь предохранительный клапан.
Если групп телескопических цилиндров две или более, то для точного равенства давления в них они соединены между собой полостью, а пиротехнический заряд может находиться как раз в этой полости. Или в каждом цилиндре может иметься свой пирозаряд, а в соединяющей полости имеется дополнительный пирозаряд, служащий для одновременного воспламенения всех пирозарядов.
Желательно, чтобы пирозаряд состоял из пороха двух или более фракций, опытным путем специально подобранных так, чтобы давление в цилиндрах в процессе выстрела было примерно постоянным.
Пример: допустим, группа телескопических цилиндров состоит из четырех цилиндров длиной по 70 см., то есть разгонная длина равна 2,7 метра (необходимо некоторое перекрытие цилиндров). Допустим, конечная скорость капсулы должна быть 30 м/сек. Находим ускорение при выстреле, считая его примерно постоянным, - 167 м/сек*сек (перегрузка 17 g). Находим время такого выстрела - 0,18 сек. То есть пороховой заряд должен полностью сгорать примерно за 0,15-0,18 сек.
ВАРИАНТ 3. Также для быстрейшего раскрытия парашюта можно применить одновременное его вытягивание с помощью выстреливания пиротехническим зарядом, и последующее вытягивание ракетным двигателем/двигателями. Выстреливающая система имеет большую скорость при выстреле, которая затем уменьшается. А реактивная система имеет малую начальную скорость. Данная система несколько сложнее, но свободна от недостатков обеих систем, и время ее раскрытия будет несколько меньше, чем у любой из этих систем по отдельности.
Для предотвращения перекоса капсулы из-за неравномерности тяги двух или более ракетных двигателей лучше применить один двигатель с несколькими (двумя или более) реактивными соплами.
Также для предотвращения увода капсулы в сторону неравномерно тянущими ракетными двигателями капсула может помещаться в цилиндре, имеющем спиральные нарезы. То есть капсула при выстреле закручивается. А чтобы стропы парашюта также не закрутились, они укладываются в капсулу с закруткой в противоположную сторону на столько, оборотов, сколько делает капсула до выхода в наивысшую точку.
ВАРИАНТ 4 - «Дискретный». То есть парашют раскрывается несколькими фиксированными рифлениями. Такой вариант удобно осуществлять с помощью пирорезаков (режущих устройств с пиротехническим приводом). То есть рифление выполняется с помощью пирорезаков, перерезающих перемычки между петлями фала рифления купола парашюта, в результате чего фал удлиняется на определенную величину.
Понятно, что чем больше будет фиксированных положений рифления, тем больше будет среднее ускорение торможения, и тем быстрее парашютная система погасит горизонтальную и вертикальную скорость самолета.
Пример: рассмотрим систему с четырьмя пирорезаками, то есть купол парашюта может принимать 5 фиксированных значений площади - 100% и еще четыре значения. Допустим, парашют при заданной массе нагрузки имеет допустимую перегрузку 4 g. Однако, при замедлении парашюта перегрузка будет снижаться, поэтому примем среднюю перегрузку торможения при работе системы 3 g. Но и эта перегрузка будет меняться в зависимости от направления приложения силы (от направления троса парашюта относительно горизонта) - при вертикальном положении троса парашюта будет сказываться гравитация - то есть из этой перегрузки будет вычитаться ускорение свободного падения, и «полезная» перегрузка окажется несколько меньше. А при промежуточных положениях троса парашюта средняя перегрузка будет иметь промежуточные значения.
Допустим, парашют испытывает перегрузку 4 g при скорости 50 км/час, а максимальная скорость самолета 300 км/час. С запасом на начало падения максимальную скорость надо выбрать примерно на 10% больше - около 330 км/час. Разделим этот интервал скоростей на 5 значений (по числу фиксированных площадей парашюта). Так как аэродинамическое сопротивление, то есть перегрузка парашюта изменяется примерно квадратично пропорционально скорости его движения, то разделить этот интервал скоростей надо пропорционально геометрической прогрессии, то есть не через равные части, а пропорционально определенному коэффициенту. Скорости отличаются в 6,6 раза, то есть этот коэффициент равен корню 4-й степени из 6,6 (так как скорость уменьшается 4 раза), что составляет 1,603. Округляем до 1,6. Получим ряд значений скорости, указанный в прилагаемой таблице.
Так как аэродинамическое сопротивление купола парашюта увеличивается примерно квадратично скорости его движения, то оно с каждой ступенью рифления увеличивается в 2,56 раза (1,6 в квадрате). Образуем геометрическую прогрессию увеличения площади купола парашюта с коэффициентом 2,56 (см. таблицу). Площадь купола парашюта определяется без площади его центрального отверстия. Для справки указаны и соответствующие значения диаметров они пропорциональны коэффициенту 1,6.
Как сказано выше, ускорение торможения, оказываемое парашютом на груз, зависит от направления троса парашюта относительно горизонта. Этот параметр не вычисляется, а определяется опытным путем. То есть точный расчет системы невозможен, а производится расчет методом последовательных. приближений по результатам испытаний. Однако, достаточно точный с практической точки зрения результат расчета можно получить по результатам работы других аналогичных систем. По результатам наблюдений упомянутый угол при выведении парашюта вверх от самолета меняется так, как указано в таблице - сначала он круче, так как парашют значительно выше самолета, затем он уменьшается из-за наличия большой горизонтальной скорости самолета, а затем увеличивается до вертикального. Небольшие отклонения его в ту или другую сторону несущественно скажутся на результатах вычислений.
В соответствии с этим углом меняется составляющая гравитации, отрицательно сказывающаяся на замедлении парашюта (как синус упомянутого угла). А в соответствии с ней меняется среднее ускорение замедления парашюта - как разница средней перегрузки и гравитационной составляющей (см. таблицу, графы «составляющая гравитации» и «ускорение торможения»).
И наконец, по разнице скоростей и ускорению торможения вычисляется время между изменениями степени рифления парашюта, то есть между началом работы системы и срабатываниями пирорезаков. При этом следует внести две поправки. Первая - на доставку купола в верхнюю точку и на его частичное раскрытие - допустим, 2 сек. И вторая поправка - на переход купола из одной степени рифления в другую (он происходит не мгновенно) - допустим, 0,2 сек.
Результаты вычислений времени с указанными поправками приведены в таблице. Вычисленные значения времени следует проверить экспериментом, так как они могут не полностью соответствовать действительности из-за неправильно принятых поправок, из-за изменения характера обтекания купола парашюта (ламинарное, турбулентное, волнообразное), из-за неправильно выбранного среднего ускорения торможения, или из-за влияния аэродинамического сопротивления самого самолета. Поэтому для первого эксперимента следует выбрать немного увеличенные промежутки времени, и проверить правильность принятых решений по записи показаний акселерометра.
ВАРИАНТ 5 - «Система управления для дискретного варианта». Возможны два подварианта такой системы управления - пиротехнический, и с электрическими, пневматическими или гидравлическими реле времени.
ПОДВАРИАНТ 5а - пиротехнический. Система управления представляет собой канал, заполненный пиротехническим составом, и имеющий отводы для приведения в действие пиротехнического стреляющего устройства или ракетного двигателя (если они есть) и пирорезаков или реле пиродавления («реле пиродавления» реагирует на давление пирозаряда, срабатывающего от канала с пиросоставом, и названо так для того, чтобы отличать его от «реле давления», срабатывающего от динамического давления скоростного напора).
. Отвод для стреляющего устройства или ракетного двигателя, если они есть, находится в самом начале этого канала.
Чтобы чрезмерно не повышать давление в канале, желательно использовать пиросостав, не выделяющий при горении газов, например, на основе термита.
На фиг.1 показана эта система, где: 1 - канал, заполненный пиросоставом, 2 - пирозаряд стреляющего устройства и/или ракетного двигателя ПЗ, 3 пирорезаки ПР-1 и т.д., 4 - электровоспламенители ВС (воспламенитель системы), дополнительные электровоспламенители ЭВ-265, ЭВ-205 и т.д. (цифра означает, меньше какой скорости включается данный дополнительный электровоспламенитель, см. ниже). Внизу фиг.1 показаны «расстояния» в секундах срабатывания пирорезака ПР-1 от момента срабатывания системы 3,44 сек и от срабатывания датчика скорости 265 км/час.
Работает эта система так: пиротехнический состав в начале канала 1 (слева) воспламеняется механическим или электрическим воспламенителем ВС, горение пиротехнического состава распространяется по каналу с определенной скоростью, и через заданные промежутки времени срабатывают пирорезаки ПР рифления парашюта. При аварии, происшедшей на меньшей скорости, срабатывают соответствующие этой скорости электровоспламенители ЭВ.
ПОДВАРИАНТ 5б - с реле времени. Система управления представляет собой цепь последовательно включенных электрических, пневматических или гидравлических реле времени, последовательно через заданные промежутки времени включающих друг друга и пирорезаки.
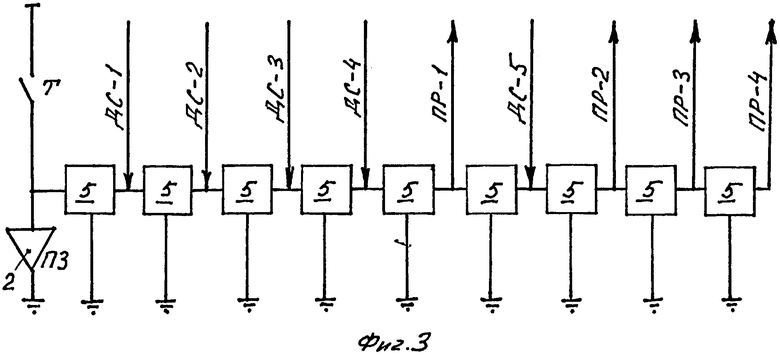
На фиг.3 показана такая система управления, где 5 - девять реле времени РВ № (все девять реле имеют общее обозначение), соединенные последовательно, Т - тумблер. Остальные обозначения аналогичны системе по подварианту 5а на фиг.1.
Работает система так: при включении ее тумблером Т напряжение подается на первое из цепи реле времени РВ №, после его срабатывания - на следующее, и так до тех пор пока не сработает пятое реле и напряжение не поступит на пирорезак ПР-1, и так далее. При включении системы на малой скорости напряжение сразу подается, например, от датчика скорости ДС-3 на четвертое от начала цепи реле РВ №, и система срабатывает по промежуточному варианту 5 г (см. ниже).
ПОДВАРИАНТ 5в - «Ускоренный». Из упомянутой таблицы рассмотренного примера видно, что первый от начала работы участок самый длинный - он равен 1,44 сек. Если скорость самолета существенно меньше максимальной, но больше следующего за ним фиксированного значения скорости, то можно улучшить работу системы, не увеличивая количество пирорезаков, если разделить этот интервал на два или более этапа. То есть, если скорость полета значительно ниже максимальной (в упомянутом примере это примерно 265 км/час), то нет необходимости держать парашют на максимальной степени рифления такое длительное время - его можно сократить, например, в два раза. Для этого система управления по пиротехническому варианту содержит дополнительный воспламенитель в пиротехническом канале, установленный так, что обеспечивает меньшее время работы системы с учетом времени на раскрытие парашюта, то есть в вышеприведенном примере - на «расстоянии» 0,72 сек от начала работы системы (зная скорость горения пиросостава в канале можно измерять расстояние по каналу в секундах). А по варианту с реле времени промежуток времени от начала работы системы до включения следующей степени рифления определяется двумя последовательно включенными реле времени, то есть в вышеупомянутом примере - в начале последовательной цепи реле времени находится реле времени с временем срабатывания 0,72 сек, а за ним - реле времени с временем срабатывания 2+0,72=2,72 сек, то есть в сумме - нужные 3,44 сек. Между ними могут находиться и другие реле времени для других скоростей полета (см. ниже).
Работает такая система так: после начала работы следующая степень рифления включается не через 3,44 сек, а через 2,72 сек.
ПОДВАРИАНТ 5г - «Промежуточный». Если самолет в момент аварии летел не только не с максимальной скоростью, а со скоростью, меньше одного из выбранных фиксированных значений скорости для срабатывания степеней рифления, то нет необходимости включать самую большую степень рифления. Можно сразу включить систему на одну из меньших степеней рифления. Например, если в рассмотренном примере скорость полета составляет 110 км/час, то нет необходимости включать систему не только на максимальную степень рифления - 2,33% площади, но и на следующую ступень - 5,96% площади. Можно сразу открывать парашют на 15,3% площади. Но делать это нужно опять же с учетом времени раскрытия купола, причем времени для раскрытия купола на бо‛льшую площадь может потребоваться чуть больше. Например, если в вышеупомянутом примере время раскрытия купола на самую большую степень рифления было принято 2 сек, то для раскрытия на вторую от максимальной степень рифления может потребоваться 2,1 сек, а на степень рифления 15,3% может потребоваться 2,2 сек, и т.п.
Для этого пиротехническая система управления имеет дополнительные воспламенители, обеспечивающие при меньшей скорости полета срабатывание нужной степени рифления с задержкой на раскрытие парашюта, причем для каждой степени рифления эта задержка имеет свое значение. То есть эти воспламенители расположены впереди и на «расстоянии» 2,1 сек, 2,2 сек и т.п. от отвода нужного пирорезака.
А система управления с реле времени содержит дополнительные реле времени, разделяющие соответствующие участки времени так, чтобы при полете с меньшей скоростью обеспечить срабатывание нужного пирорезака с заданной задержкой времени, причем для каждой степени рифления эта задержка имеет свое значение.
В обоих этих случаях в отведенный для раскрытия купола промежуток времени попадут значения времени, соответствующие срабатываниям предыдущих степеней рифления. Но это не имеет значения, так как срабатывание этих пирорезаков произойдет в период раскрытия купола, и к моменту его раскрытия фал рифления будет иметь нужную длину. Но надо проконтролировать, чтобы за время последнего перед 100%-ным открытием купола - самого короткого промежутка времени - сработали пирорезаки всех предыдущих степеней рифления. При этом надо иметь в виду, что горение пиросостава в канале распространяется в обе стороны от воспламенителя, а в последовательной цепи нескольких реле времени срабатывание их распространяется только в одном направлении.
ПОДВАРИАНТ 5д. В предыдущих подвариантах 5в и 5г предусмотрено срабатывание одного или нескольких дополнительных воспламенителей. Для их срабатывания необходимо наличие датчиков скорости. Данная система управления содержит многопозиционный датчик скорости в виде штатного механического датчика скорости со скользящим двухточечным контактом на стрелке, и с электропроводными секторами на шкале прибора, или в виде нескольких реле дифференциального давления или реле давления. Например, с учетом подвариантов 5в и 5г в вышеприведенном примере шкала прибора должна иметь 5 электропроводящих секторов (один для подварианта 5в и четыре для подварианта 5г), или же система управления должна иметь 5 датчиков давления.
Двухточечным контакт на стрелке прибора должен быть потому, что если стрелка остановится точно в промежутке между двумя секторами, то хотя бы один из этих секторов должен иметь электрический контакт со стрелкой. При наличии двух расположенных одна за другой точек контакта это будет обеспечено.
Для определения скорости полета обычно используются приборы, являющиеся дифференциальными манометрами. Но так как нам необходимо знать не точное значение скорости, а момент срабатывания пирорезаков, то можно применить реле не дифференциального давления, а просто реле давления, срабатывающие от динамического давления скоростного напора. При этом систематическая поправка на давление внутри фюзеляжа самолета будет учитываться при настройке системы управления.
Возможно применение на самолете датчика скорости с электрическим или цифровым преобразователем. Принцип датчика остается тем же самым. В первом случае фиксированные значения скорости могут определяться датчиками напряжения, например, с использованием стабилитронов. Во втором случае фиксированные значения скорости определяются по комбинации цифр на дисплее анемометра.
Но работа системы управления с датчиками скорости имеет две особенности: во-первых, при срабатывании пирорезака меньшей степени рифления должны сработать и пирорезаки больших степеней рифления, иначе они просто не отпустят фал рифления парашюта. Для системы с отдельными датчиками давления это условие выполняется само собой, а для системы с многопозиционного датчика скорости электрическая схема их подключения будет иметь некоторые особенности. Во-вторых, после срабатывания системы самолет может изменить пространственное положение, и датчики скорости покажут скорость, равную нулю. Чтобы при этом не произошло ложного преждевременного срабатывания пирорезаков с меньшей степенью рифления, необходимо после срабатывания системы достаточно быстро (0,1-0,3 сек) отключить электропитание датчиков скорости. Тогда срабатывание пирорезаков будет определяться только горением канала с пиросоставом (подвариант 5а) или последовательной цепью нескольких реле времени (подвариант 5б).
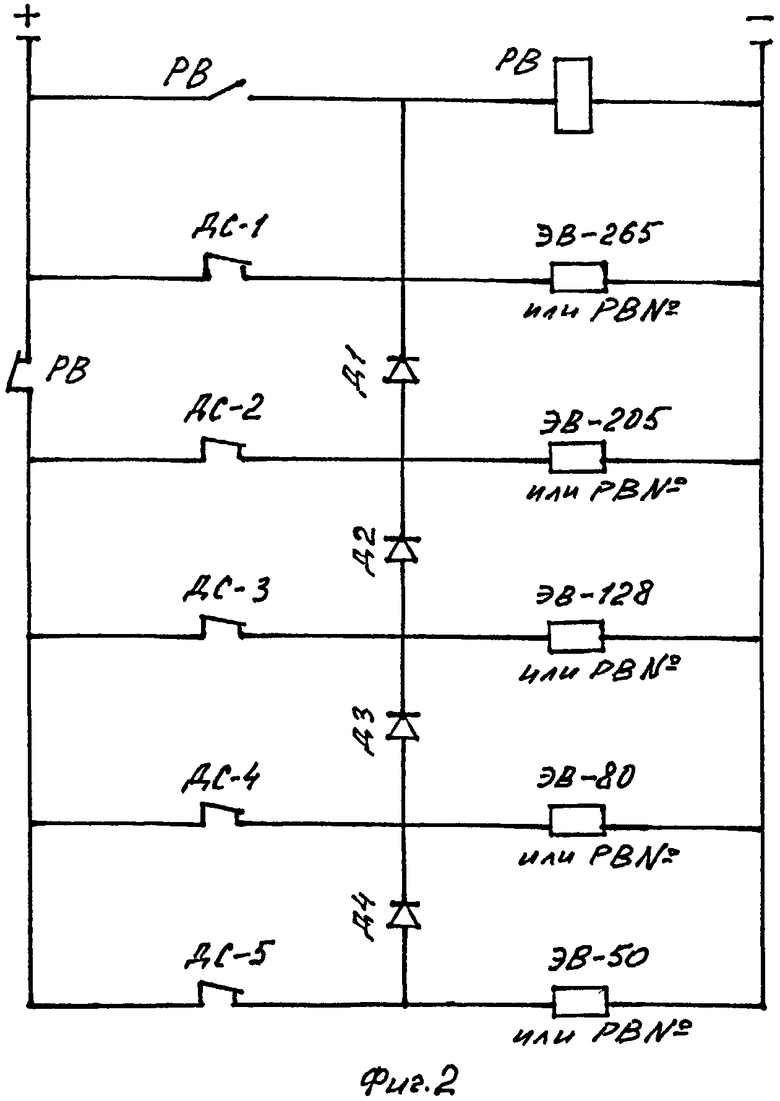
Для этого электрическая схема соединения датчиков скорости с пирорезаками должна иметь следующий вид, см. фиг.2, где РВ - реле времени и его переключающийся контакт (показан в виде двух контактов РВ с общей точкой), ДС-1 и т.д. - датчики скорости, ЭВ-265 или РВ № - дополнительные электровоспламенители или реле времени в последовательной цепи из нескольких реле, Д1-Д4 - диоды. Кроме того, чтобы система не сработала еще на земле - при нулевой скорости, - вся схема подключается через аварийный тумблер или через аварийную кнопку и самоблокирующееся реле (тумблер не показан).
Работает эта схема так: если система срабатывает на какой-то промежуточной скорости, например, меньше 128 км/час, то замыкается контакт датчика скорости ДС-3. Срабатывает электровоспламенитель ЭВ-128, и через диоды ток поступает также на реле времени РВ и на ЭВ-205 и ЭВ-265 (или соответствующие реле времени в последовательной цепи). Электровоспламенители ЭВ-80 и ЭВ-50 преждевременно не сработают, так как ток через встречно включенные диоды на них не поступает. Чтобы они преждевременно не сработали при ложном обнулении показаний датчика скорости во время болтанки, все датчики кроме ДС-1 через 0,1-0,2 секунды после срабатывания системы отключаются переключающимся контактом реле времени РВ. Электровоспламенители за этот промежуток времени должны успеть сработать.
ВАРИАНТ 6 - «Сглаженный». В пиротехническом дискретном варианте 4 переход из одной степени рифления происходит достаточно быстро (в рассмотренном примере принято время перехода 0,2 сек). Но если этот переход сознательно замедлить, то получится псевдоплавное изменение степени рифления. То есть, как только заканчивается переход на другую степень рифления, подходит время перехода уже на следующую степень рифления, и таким образом, парашют увеличивает свою площадь почти непрерывно.
Такая система содержит барабан, на который намотан фал рифления, и содержит электрический, пневматический или гидравлический двигатель/двигатели, приводящий в движение барабан по командам системы управления через самотормозящуюся передачу.
В качестве самотормозящейся передачи можно применить червячный редуктор. Редуктор должен быть достаточно скоростным - на пределе самоторможения. Для уменьшения потребного крутящего момента электродвигателя можно применить еще одну зубчатую ступень до или после червячной ступени.
Фал рифления стремится сойти с барабана сам, поэтому передача должна быть самотормозящейся. А двигатель должен только преодолевать трение самотормозящейся кинематики, и поэтому он может иметь очень небольшую мощность.
Для надежности система может иметь не один, а два двигателя, работающих на входной вал самотормозящейся передачи.
Система управления для этого варианта может быть аналогична подвариантам 5а и 5б. То есть, или система представляет собой канал, заполненный пиротехнической смесью, имеющий дополнительные электровоспламенители, и имеющий отводы для приведения в действие пиротехнического стреляющего устройства или ракетного двигателя и нескольких реле пиродавления, чьи замыкающие контакты соединены с обмотками магнитных пускателей. Или система представляет собой цепь последовательно включенных электрических, пневматических или гидравлических реле времени, последовательно через заданные промежутки времени включающих друг друга и магнитные пускатели.
Как видно из таблицы упомянутого примера, переход с максимальной степени рифления на следующую происходит достаточно долго - 1,44 сек, а разница в диаметрах невелика - 3,63% диаметра. А переход к раскрытию на 100% длится 0,61 сек, но при этом разница в диаметрах большая 37,5%. То есть в первом случае скорость вращения барабана желательна 2,52%/сек, а во втором случае - 61,5%, то есть, скорости значительно отличаются.
Чтобы сделать разрифление парашюта псевдоплавным, надо регулировать скорость вращения двигателя. Регулировать скорость вращения электродвигателя в данном случае могут быть применены известные для этого методы. Если на самолете используется электросистема постоянного тока, то для уменьшения скорости вращения двигателя могут быть применены дополнительные балластные резисторы. То есть такая система содержит несколько магнитных пускателей, подключенных через свое реле пиродавления или свое реле времени из их последовательной цепи, каждый из которых кроме последнего подключает электродвигатель через последовательно включенный балластный резистор, или же для двух или более степеней рифления применен один пускатель, подключенный параллельно через диоды и два или более реле пиродавления или реле времени из их последовательной цепи.
Если же на самолете используется электросистема переменного тока, в частности - трехфазного, то кроме указанного возможен и другой метод регулирования скорости вращения асинхронного двигателя. Для этого система управления содержит генератор импульсов переменной длительности, например, с использованием симметричных тиристоров (такие схемы хорошо известны и применяются для регулирования яркости электрических ламп).
После отпускания заданного количества фала рифления электродвигатель должен остановиться. Для этого надо измерять длину отпущенного фала. С этой целью система имеет счетчик фала, представляющий собой редуктор, выходной вал которого за время работы системы делает не более одного оборота, и на этом валу имеет диск с несколькими электропроводящими секторами, причем секторы имеют возможность контактировать со скользящим контактом и со вторым последовательно расположенным контактом или с коллектором (второй последовательно расположенный напротив этого же сектора контакт выполняет роль коллектора), или же счетчик имеет на этом валу диск с выпуклыми секторами, контактирующими с установленными напротив них электрическими или пневматическими концевыми выключателями.
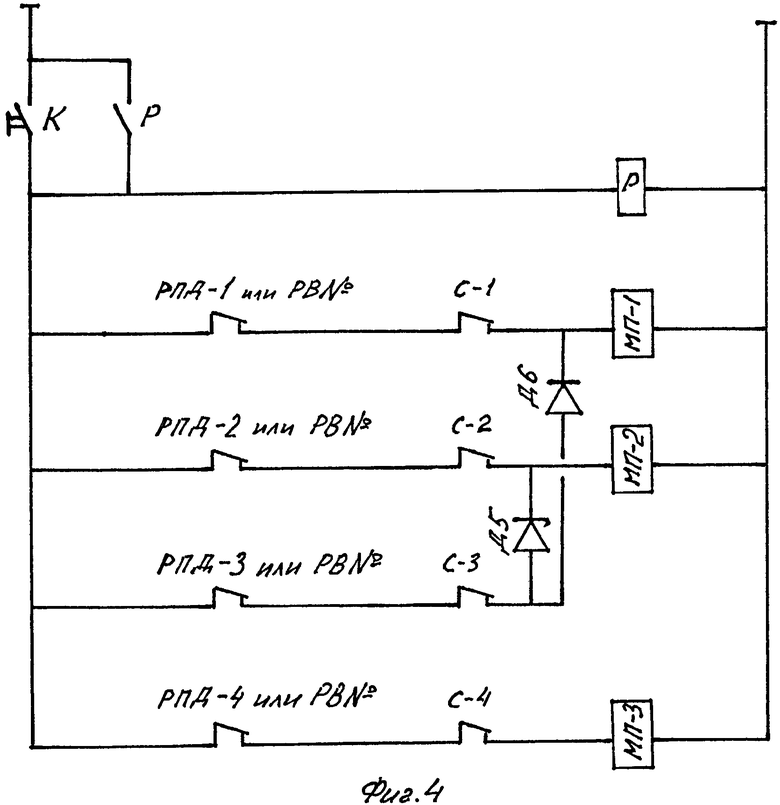
Элементы системы соединены по схеме на фиг.4. где: К - кнопка включения системы, Р - реле и его самоблокируюший контакт, РПД-1 или РВ № - контакт реле пиродавления (подвариант 5а) или реле времени из их последовательной цепочки (подвариант 5б), С-1 контакт счетчика фала рифления парашюта, МП-1 магнитный пускатель, Д5, Д6 - диоды.
Работает эта система так: при кратковременном нажатии аварийной кнопки К срабатывает реле времени Р и самоблокируется, оставляя всю схему под напряжением. Одновременно срабатывает остальная часть системы управления - пироканал 1 на фиг.1, или последовательно соединенные реле времени 5 на фиг.3. При работе пиротехнического варианта системы управления в нужное время срабатывает реле пиродавления РПД-1, а при работе варианта с реле времени срабатывает нужное реле РВ №, и включается магнитный пускатель МП-1, который включает электродвигатель через балластный резистор сопротивлением, например, 3 ом. Электродвигатель вращается сравнительно медленно. Отпустив нужное количество фала рифления, электродвигатель останавливается контактом счетчика фала С-1.
Затем в нужное время срабатывает реле пиродавления РПД-2 или нужное реле времени РВ №, и включается магнитный пускатель МП-2, включая электродвигатель через балластный резистор номиналом, например, 2 ом. Электродвигатель вращается быстрее.
Затем включается реле РПД-3 или соответствующее реле из числа РВ № и напряжение через диоды Д5 и Д6 подается на упомянутые два пускателя одновременно. Суммарное сопротивление двух параллельно включенных балластных резисторов составит 1,2 ом. Электродвигатель вращается еще быстрее.
Наконец, включается РПД-4 или соответствующее реле из числа РВ №, и включается пускатель МП-3, который включает электродвигатель без балластных резисторов. Скорость вращения электродвигателя максимальна.
Для надежности можно цепь РПД-4 также соединить двумя диодами с МП-1 и МП-2. Скорость сращения электродвигателя это не увеличит, но при отказе пускателя МП-3 фал рифления хоть и не максимально быстро, но все же будет отпускаться.
Еще многофункциональное и легче, особенно при наличии на самолете трехфазной электросети, будет система с асинхронным двигателем. Она применима и на самолете с электросетью постоянного тока - известны преобразователи тока, которые имеют также функцию регулирования оборотов электродвигателя. Такие двигатели и преобразователи широко используются в электрических авиамоделях. Изделия зарекомендовавших себя фирм, предварительно проверенные на стенде, достаточно надежны, и их вполне можно применять для системы управления парашютной системой. Управляться такая система может с помощью вышеприведенных подвариантов системы управления, а регулировать скорость вращения электродвигателя можно с помощью многоступенчатого делителя напряжений, связанного с электропроводящими секторами счетчика фала рифления. Или с помощью схемы, аналогичной фиг.4, где ответвления делителя напряжений соединяются реле пиродавления или последовательными реле времени с электронной схемой управления скоростью вращения электродвигателя.
Следует отметить, что время срабатывания реле пиродавления и реле времени РВ № должно быть другим, нежели в дискретном варианте с пирорезаками. Расчет времени следует вести с помощью интегрирования, и время каждого этапа рифления и все время торможения в целом окажется меньше, чем в дискретном варианте, что и являлось целью данного варианта.
ВАРИАНТ 7. «Плавный - Д» (с двигателем). Максимальное ускорение торможения и минимальное время торможения можно получить, если отпускать фал рифления парашюта постепенно, измеряя и поддерживая постоянным ускорение торможения. То есть, в вышеупомянутом примере - 4 g. Для этого система управления содержит реле ускорения, настроенное на допустимое ускорение торможения, содержит барабан, на который намотан фал рифления, и содержит электрический, пневматический или гидравлический двигатель/двигатели, приводящий в движение барабан по командам системы управления через самотормозящуюся передачу.
Реле ускорения имеет вид груза на пружине и концевого включателя под ним, расположенных в цилиндре, закрепленном на двух ортогональных шарнирах или на шарнире Гука, длина вилок которого больше радиуса крестовины, причем провода для подключения концевого выключателя - гибкие.
Упомянутое условие длины вилок шарнира Гука нужно для того, чтобы шарнир позволял цилиндру отклоняться на угол до 135-150 градусов в любую сторону. Это необходимо потому, что самолет при раскрытии парашюта болтает, а цилиндр должен иметь возможность все время быть направленным в сторону ускорения торможения. Шаровой шарнир для этой цели применять нежелательно, так как он имеет ограниченный сектор подвижности и имеет повышенное трение.
Как указывалось выше, скорость вращения двигателя желательно регулировать. Для этого можно применить вышеуказанные средства. Однако система управления может быть значительно проще - не требуются пироканал или цепь последовательных реле времени. Двигатель управляется только реле ускорения. А регулировать скорость вращения электродвигателя можно с помощью многоступенчатого делителя напряжений, связанного через электропроводящие сектора счетчика фала рифления со входом электронной системы управления двигателем. Можно использовать и плавное регулирование скорости вращения с помощью переменного резистора, расположенного на счетчике фала рифления. Но переменные резисторы при длительном хранении, особенно - в сырости, могут терять работоспособность.
Работа системы имеет одну особенность - следует блокировать включение электродвигателя до раскрытия парашюта на заданную степень рифления. Это необходимо для того, чтобы электродвигатель по команде реле ускорения, которое еще не нагружено, не стал бы отпускать фал рифления еще до раскрытия парашюта на заданную степень рифления. Для этого электродвигатель подключен через реле времени, блокирующее включение двигателя на заданное время после включения системы.
Электрическая схема этого варианта системы может быть аналогична фиг.4, только вместо четырех контактов ДС-1 имеется один контакт реле ускорения, а контакты счетчика С-1 не останавливают двигатель, а управляют его скоростью вращения, включая тот или иной, или оба, или все три пускателя.
Самая простая электрическая схема без регулирования скорости содержит всего три последовательно включенных элемента - реле времени, концевой выключатель реле ускорения, и электродвигатель. Если концевой выключатель не рассчитан на мощность электродвигателя, схема системы управления содержит вместо электродвигателя магнитный пускатель или электронный преобразователь для асинхронного двигателя.
Вне зависимости от выбранной электрической схемы работает эта система принципиально так: после включения системы, то есть после подачи напряжения тумблером или кнопкой, двигатель на некоторое время блокируется с помощью реле времени. После раскрытия парашюта на заданную степень рифления реле времени отключается, а груз реле ускорения или нажимает на концевой выключатель, если ускорение торможения велико, или не достает до него. Последнее означает, что ускорение недостаточно, и электродвигатель включается и отпускает фал рифления, увеличивая площадь парашюта до тех пор, пока ускорение не станет равно заданному, например, 4 g. Тогда груз проседает на пружине, давит на концевой выключатель, его контакт размыкается, и двигатель останавливается в этом положении. Ускорения торможения самолета уменьшается до 3,9 g, и реле ускорения опять включает электродвигатель, чтобы снова увеличить площадь парашюта. Так повторяется до тех пор, пока парашют не раскроется на все 100%. Среднее ускорения торможения составит 3,95 g вместо 3 g в дискретном варианте.
Здесь проявляется еще одна особенность работы этой системы - реле ускорения через некоторое время после раскрытия парашюта на 100% снова отключается, и двигатель, полностью отпустив фал рифления и стремясь отпустить его еще, может начать наматывать фал обратно на барабан. Чтобы это предотвратить, двигатель при израсходовании всего фала рифления отключается счетчиком фала или лапкой с концевым выключателем, расположенной около барабана напротив нового положения фала.
Работает лапка так: когда фал отпускался, он проходил по касательной к одной стороне барабана, а при намотке при том же направлении вращения барабана фал проходит по касательной к другой стороне барабана. И лапка, расположенная на новом пути фала, будет им отодвинута, это вызовет срабатывание ее концевого выключателя, и двигатель полностью отключится.
ВАРИАНТ 8. «Плавный - Т» (с тормозом). Для управляемого отпуска фала рифления можно применить не самотормозящуюся передачу и электродвигатель, а несамотормозящуюся передачу и тормоз. Такая система управления содержит реле ускорения, настроенное на допустимое ускорение торможения, содержит барабан, на который намотан фал рифления, и содержит электрический, пневматический или гидравлический управляемый тормоз, тормозящий барабан фала по командам системы управления непосредственно или через несамотормозящуюся передачу.
В качестве несамотормозящейся передачи может быть выбран несамотормозящийся червячный редуктор (с большим шагом червяка или многозаходный), хотя в данном случае его правильнее было бы назвать мультипликатором. Такой редуктор достаточно легко отпускает фал рифления сам, но при малейшем тормозном усилии на вторичном вале тормозит барабан. Можно тормозить барабан и непосредственно, но при этом тормозное усилие будет намного больше. И к тому же без редуктора барабан будет отпускать фал слишком быстро, что может привести к слишком быстрому переходу на меньшую степень рифления, что чревато разрывом парашюта.
Скоростью отпускания фала можно регулировать электронным методом - с помощью уже упоминавшегося тиристорного управления. Для этого электрическая схема управления должна содержать регулируемый мультивибратор и управляемый им тиристор.
Вал тормоза может иметь дополнительный замедлитель в виде крыльчатки вентилятора.
Работает эта система аналогично предыдущему варианту «Плавный - Д», но только вместо двигателя система управления включает электромагнит, растормаживающий барабан. И фал получает возможность разматываться сам.
Этот вариант системы имеет очень существенное преимущество перед вариантом с электродвигателем - при отказе электродвигателя или всей системы электропитания пилот ничего не сможет сделать. А при отказе электромагнитного тормоза при достаточном самообладании пилот может с помощью ручного привода этого же тормоза (например, с помощью тросика) постепенно растормаживать барабан, ориентируясь при этом на свои ощущения перегрузки или на показания акселерометра.
Для этого система содержит дополнительный ручной привод тормоза на растормаживание, например, с помощью тросика.
Перед барабаном может быть установлено дополнительное пассивное тормозное устройство, например, в виде расположенного поперек фала или под углом к нему гладкого стержня, вокруг которого фал обернут один или несколько раз. Оно ослабит усилие на барабане в несколько раз.
ВАРИАНТ 9. «Плавный - Т-Ф» (с торможением фала). В предыдущем варианте фал рифления тормозился путем торможения барабана, на который он намотан. Однако тормозить можно и непосредственно фал. Для этого система содержит реле ускорения, настроенное на допустимое ускорение торможения, содержит емкость с уложенным в нее фалом, или содержит неподвижную шпулю с фалом, ориентированную продольно направлению схода фала, и содержит электрический, пневматический или гидравлический управляемый тормоз фала, например, в виде двух полукруглых ложементов, тормозящий фал по командам системы управления.
Работает такая система так: при переходе на другую степень рифления парашюта фал, удерживаемый тормозом фала (то есть, сжимаемый в полукруглых ложементах), отпускается по сигналу реле ускорения, фал выбирается из емкости, в которую он аккуратно уложен изгибающимися витками, или фал сходит с торца неподвижной шпули (как сходит леска с безинерционной спиннинговой катушки), и парашют увеличивает свою площадь. При увеличении перегрузки до заданной фал рифления тормозится тормозом фала. Цикл повторяется.
Для облегчения работы такого тормоза перед ним также может быть установлено дополнительное пассивное тормозное устройство, например, в виде расположенного поперек фала или под углом к нему гладкого стержня, вокруг которого фал обернут один или несколько раз. Оно ослабит усилие на тормозе фала в несколько раз.
Этот вариант также может иметь плавное регулирование тормозного усилия и запасное ручное управление.
ВАРИАНТ 10. «Плавный ДТ». Этот вариант представляет собой комбинацию предыдущих трех-система содержит реле ускорения, настроенное на допустимое ускорение торможения, содержит барабан, на который намотан фал рифления, содержит электрический, пневматический или гидравлический двигатель/двигатели, приводящий в движение барабан по командам системы управления через понижающую передачу, и содержит электрический, пневматический или гидравлический управляемый тормоз, тормозящий барабан или непосредственно фал по командам системы управления непосредственно или через эту же передачу.
В качестве редуктора можно выбрать червячный редуктор, находящийся на грани самоторможения. Такой редуктор будет вращать при самой малой мощности электродвигателя, и тормозиться при самом легком тормозном усилии.
Для плавного регулирования скорости вращеиня электродвигателя и для плавного изменения тормозного усилия используется одна и та же схема, содержащая регулируемый мультивибратор и управляемый им тиристор.
ВАРИАНТ 11. «Система управления». Эта система пригодна для всех вышеупомянутых вариантов. Для быстрого срабатывания парашютной системы при поломке консоли крыла или при поломке фюзеляжа необходимо иметь автоматическую систему управления срабатыванием парашютной системы. Для нее необходимы датчики разрушения крыла. Фюзеляж разрушается очень редко, но возможны такие датчики и для фюзеляжа.
Для этого система имеет закрепленные на внутренней или наружной части верхней и/или нижней поверхности крыла и/или фюзеляжа тонкие проводники, и/или имеет концевые выключатели с замыкающими контактами в местах крепления консолей крыла к фюзеляжу. Эти проводники и/или выключатели включены последовательно между собой и с промежуточным реле, размыкающий контакт которого включен в последовательную цепь с реле времени или выключателем и с электрическим инициатором системы управления.
Реле времени с заданным промежутком 0,1 сек необходимо для того, чтобы при подключении электропитания система не включилась через замкнутый в этот момент контакт промежуточного реле. С этой же целью можно временно отключить систему ручным выключателем.
Упомянутым инициатором включения системы управления может быть электрический воспламенитель пиротехнической системы замедления срабатывания пирорезаков, или входной контакт крайнего реле времени в цепи нескольких последовательно включенных реле времени, предназначенных для включения пиротехнического или электрического устройства, режущего трос рифления купола, имеющий петли.
Возможен пневматический или гидравлический вариант этой системы. В нем система имеет закрепленные на внутренней или наружной части верхней и/или нижней поверхности крыла и/или фюзеляжа тонкие трубопроводы, и/или имеет соединенные с атмосферой закрывающие клапаны в местах крепления консолей крыла к фюзеляжу, контактирующие с консолью крыла, причем эти элементы соединены параллельно между собой и последовательно с пневмореле, которое при падении давления имеет возможность включать воспламенитель системы управления.
Электрические схемы, срабатывающие от обрыва цепи, хорошо известны и применяются, например, в охранных системах. Поэтому в данном разделе они не приводятся.
Работают эти системы управления принципиально одинаково: при разрушении или отсоединении консоли крыла проводники рвутся, а концевые выключатели размыкаются, целостность цепи промежуточного реле нарушается, оно обесточивается, его размыкающий контакт замыкается, инициатор срабатывает, и система автоматически включается.
Чтобы не произошло ложного срабатывания инициатора при подсоединении электропитания, реле времени некоторое время после подачи электропитания на всю систему управления блокирует включение инициатора, например, на 0,1 сек или даже меньше. То есть после поломки консоли парашютная система включится автоматически не мгновенно, а через 0,1 сек. Эту задержку можно исключить, если вместо реле времени применить ручной выключатель в цепи инициатора. При включении электропитания каждый раз следует выключать этот выключатель, и сразу же включать его после подачи электропитания. Лучше применить размыкающую кнопку.
То же для системы с пневмо- или гидроуправлением - то есть, при падении давления в пневмо- или гидросистеме пневмореле включает электрический или механический воспламенитель парашютной системы. При подаче давления в систему управления следует на некоторое время блокировать работу воспламенителя. При подаче электропитания - тоже.
ВАРИАНТ 12. Для использования капсулы парашюта в качестве источника дополнительной силы для раскрытия парашюта, она может быть прикреплена шнуром или двумя шнурами ограниченной прочности к центральной части парашюта за аэродинамический фокус своей максимальной проекции, обеспечивающей максимальное аэродинамическое сопротивление.
Максимальная по площади проекция цилиндрической капсулы будет примерно под углом 10-15 градусов к оси ее цилиндрической поверхности, причем открытой сторон цилиндра - вперед. Лучше крепить капсулу двумя-тремя шнурами, тогда она не будет болтаться в набегающем потоке и будет все время ориентирована именно так.
Работает система аналогично предыдущим, но капсула выполняет роль вытягивающего парашюта.
Применение отдельных вытягивающего и тормозного парашютов в вышеупомянутых системах нецелесообразно - основной парашют быстро раскрывается и вступает в работу и без них.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПАРАШЮТИРОВАНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2533618C1 |
| СИСТЕМА ПАРАШЮТИРОВАНИЯ - 4 И СПОСОБ ЕЁ РАБОТЫ | 2014 |
|
RU2576852C1 |
| СИСТЕМА ПАРАШЮТИРОВАНИЯ И СПОСОБ ЕЁ РАБОТЫ | 2013 |
|
RU2527633C1 |
| ПУСКАТЕЛЬ ДЛЯ ЭЛЕКТРОДВИГАТЕЛЕЙ, СОЕДИНЕННЫХ ТРЕУГОЛЬНИКОМ (ВАРИАНТЫ) | 2007 |
|
RU2344539C2 |
| АТТРАКЦИОН-ТРЕНАЖЕР /ВАРИАНТЫ/ | 2014 |
|
RU2569217C1 |
| КОСМИЧЕСКАЯ РАКЕТА /ВАРИАНТЫ/ И СПОСОБ ЕЕ ПОСАДКИ | 2014 |
|
RU2568630C1 |
| КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ /ВАРИАНТЫ/ | 2014 |
|
RU2557873C1 |
| ЗАЩИТНЫЙ БЛОК-ПУЛЬТ /ВАРИАНТЫ/ | 2006 |
|
RU2319271C1 |
| ПАРАШЮТ С ПЛАВНЫМ РАСКРЫТИЕМ /ВАРИАНТЫ/ | 2014 |
|
RU2569986C1 |
| УСТРОЙСТВО ДЛЯ СБРАСЫВАНИЯ ТЯЖЕЛЫХ ГРУЗОВ С ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1992 |
|
RU2015071C1 |
Группа изобретений относится к оборудованию летательных аппаратов. Варианты парашютных систем отличаются видом системы управления, варианты которой включают пиротехнический заряд, электродвигатель, плавно отпускающий фал рифления по командам системы управления, реле ускорения торможения, барабан с фалом, управляемый тормоз с плавно регулируемым тормозным усилием, запасное ручное управление, закрепленные на внутренней или наружной части верхней и/или нижней поверхности крыла и/или фюзеляжа тонкие проводники и/или имеют концевые выключатели с замыкающими контактами в местах крепления консолей крыла к фюзеляжу. Группа изобретений направлена на расширение арсенала технических средств. 12 н. и 18 з.п. ф-лы, 4 ил., 1 табл.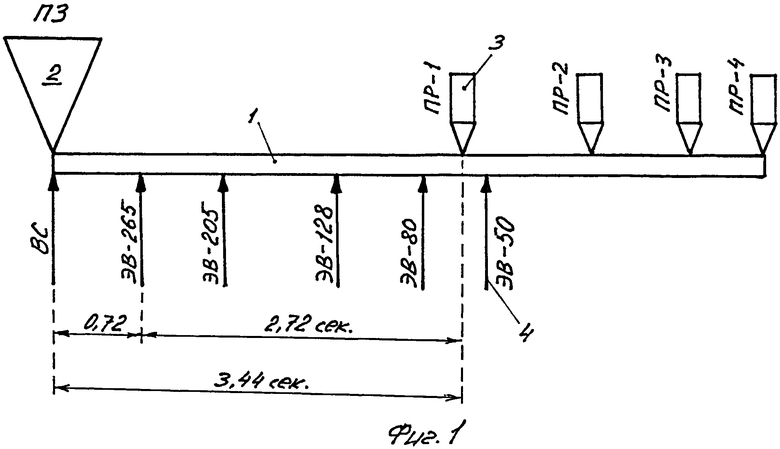
1. Парашютная система, содержащая парашют в капсуле и систему управления им и имеющая несколько фиксированных положений рифления парашюта, отличающаяся тем, что площади степеней рифления купола от минимальной до максимальной представляют собой геометрическую прогрессию, а время каждого этапа рифления вычисляется с поправкой на составляющую гравитации, которая определяется как 9,81*SinA, где А - угол парашютного троса относительно горизонта, и эта поправка вычитается из среднего ускорения торможения груза на каждом этапе.
2. Система по п.1, отличающаяся тем, что рифление выполняется с помощью пирорезаков, перерезающих перемычки между петлями фала рифления купола парашюта.
3. Система управления парашютной системой по п.2, отличающаяся тем, что представляет собой канал, заполненный пиротехническим составом и имеющий отводы для приведения в действие пиротехнического стреляющего устройства или ракетного двигателя и пирорезаков или датчиков пиродавления.
4. Система управления по п.3, отличающаяся тем, что содержит дополнительный воспламенитель в пиротехническом канале, установленный так, что обеспечивает меньшее время работы системы с учетом времени на раскрытие парашюта, или имеет дополнительные воспламенители, обеспечивающие при меньшей скорости полета срабатывание нужной степени рифления с задержкой на раскрытие парашюта, причем для каждой степени рифления эта задержка имеет свое значение.
5. Система управления по п.3, отличающаяся тем, что содержит многопозиционный датчик скорости в виде штатного механического датчика скорости со скользящим двухточечным контактом на стрелке и с электропроводными секторами на шкале прибора или в виде нескольких реле дифференциального давления или реле давления.
6. Система управления парашютной системой по п.1, отличающаяся тем, что представляет собой цепь последовательно включенных электрических, пневматических или гидравлических реле времени, последовательно через заданные промежутки времени включающих друг друга и пирорезаки.
7. Система управления по п.6, отличающаяся тем, что промежуток времени от начала работы системы до включения следующей степени рифления определяется двумя последовательно включенными реле времени, и/или система содержит дополнительные реле времени, разделяющие соответствующие участки времени так, чтобы при полете с меньшей скоростью обеспечить срабатывание нужного пирорезака с заданной задержкой времени, причем для каждой степени рифления эта задержка имеет свое значение.
8. Система управления по п.6, отличающаяся тем, что содержит многопозиционный датчик скорости в виде штатного механического датчика скорости со скользящим двухточечным контактом на стрелке и с электропроводными секторами на шкале прибора или в виде нескольких реле дифференциального давления или реле давления.
9. Парашютная система, содержащая парашют в капсуле и систему управления им, отличающаяся тем, что содержит барабан, на который намотан фал рифления, и содержит электрический, пневматический или гидравлический двигатель/двигатели, приводящий в движение барабан по командам системы управления через самотормозящуюся передачу.
10. Система управления парашютной системой по п.9, отличающаяся тем, что представляет собой канал, заполненный пиротехнической смесью, имеющий дополнительные электровоспламенители и имеющий отводы для приведения в действие пиротехнического стреляющего устройства или ракетного двигателя и нескольких реле пиродавления, чьи замыкающие контакты соединены с обмотками магнитных пускателей, или система представляет собой цепь последовательно включенных электрических, пневматических или гидравлических реле времени, последовательно через заданные промежутки времени включающих друг друга и магнитные пускатели.
11. Система по п.10, отличающаяся тем, что скорость вращения электродвигателя регулируется.
12. Система по п.11, отличающаяся тем, что содержит несколько магнитных пускателей, подключенных через свое реле пиродавления или свое реле времени из их последовательной цепи, каждый из которых кроме последнего подключает электродвигатель через последовательно включенный балластный резистор, или для двух или более степеней рифления применен один пускатель, подключенный параллельно через два или более реле пиродавления или реле времени из их последовательной цепи.
13. Система по п.11, отличающаяся тем, что содержит генератор импульсов переменной длительности, управляющий скоростью вращения электродвигателя.
14. Система по п.10, отличающаяся тем, что имеет счетчик фала, представляющий собой редуктор, выходной вал которого за время работы системы делает не более одного оборота, и на этом валу имеет диск с несколькими электропроводящими секторами, причем секторы имеют возможность контактировать со скользящим контактом и со вторым последовательно расположенным контактом или с коллектором, или же счетчик имеет на этом валу диск с выпуклыми секторами, контактирующими с установленными напротив них концевыми выключателями.
15. Парашютная система, содержащая парашют в капсуле и систему управления им, отличающаяся тем, что содержит реле ускорения, настроенное на допустимое ускорение торможения, содержит барабан, на который намотан фал рифления, и содержит электрический, пневматический или гидравлический двигатель, приводящий в движение барабан фала по командам системы управления через самотормозящуюся передачу.
16. Система по п.15, отличающаяся тем, что реле ускорения имеет вид груза на пружине и концевого включателя под ним, расположенных в цилиндре, закрепленном на двух ортогональных шарнирах или на шарнире Гука, длина вилок которого больше радиуса крестовины, причем провода для подключения концевого выключателя - гибкие.
17. Система по п.15, отличающаяся тем, что скорость вращения электродвигателя регулируется.
18. Система по п.15, отличающаяся тем, что электродвигатель подключен через реле времени, блокирующее включение двигателя на заданное время после включения системы, а также двигатель при израсходовании всего фала рифления отключается счетчиком фала или лапкой с концевым выключателем, расположенной около барабана напротив нового положения фала.
19. Парашютная система, содержащая парашют в капсуле и систему управления им, отличающаяся тем, что содержит реле ускорения, настроенное на допустимое ускорение торможения, содержит барабан, на который намотан фал рифления, и содержит электрический, пневматический или гидравлический управляемый тормоз, тормозящий барабан фала по командам системы управления непосредственно или через несамотормозящуюся передачу.
20. Система по п.19, отличающаяся тем, что электрическая схема управления тормозом с электроприводом содержит регулируемый мультивибратор и управляемый им тиристор.
21. Система по п.19, отличающаяся тем, что содержит дополнительный ручной привод тормоза на растормаживание, например, с помощью тросика.
22. Система по п.19, отличающаяся тем, что перед барабаном установлено дополнительное пассивное тормозное устройство, например, в виде расположенного поперек фала или под углом к нему гладкого стержня, вокруг которого фал обернут один или несколько раз.
23. Система по п.19, отличающаяся тем, что вал тормоза имеет дополнительный замедлитель в виде крыльчатки вентилятора.
24. Парашютная система, содержащая парашют в капсуле и систему управления им, отличающаяся тем, что содержит реле ускорения, настроенное на допустимое ускорение торможения, содержит емкость с уложенным в нее фалом или содержит неподвижную шпулю с фалом, ориентированную продольно направлению схода фала, и содержит электрический, пневматический или гидравлический управляемый тормоз фала, например, в виде двух полукруглых ложементов, тормозящий фал по командам системы управления.
25. Парашютная система, содержащая парашют в капсуле и систему у правления им, отличающаяся тем, что содержит реле ускорения, настроенное на допустимое ускорение торможения, содержит барабан, на который намотан фал рифления, содержит электрический, пневматический или гидравлический двигатель/двигатели, приводящий в движение барабан по командам системы управления через понижающую передачу, и содержит электрический, пневматический или гидравлический управляемый тормоз, тормозящий барабан или непосредственно фал по командам системы управления непосредственно или через эту же передачу.
26. Система по п.25, отличающаяся тем, что для плавного регулирования скорости вращения электродвигателя и для плавного изменения тормозного усилия используется одна и та же схема, содержащая регулируемый мультивибратор и управляемый им тиристор.
27. Система управления парашютной системой, отличающаяся тем, что имеет закрепленные на внутренней или наружной части верхней и/или нижней поверхности крыла и/или фюзеляжа тонкие проводники и/или имеет концевые выключатели с замыкающими контактами в местах крепления консолей крыла к фюзеляжу, которые включены последовательно между собой и с промежуточным реле с размыкающим контактом, контакт которого включен в последовательную цепь с реле времени или выключателем и с электрическим инициатором системы управления.
28. Система по п.27, отличающаяся тем, что инициатором может быть электрический воспламенитель пиротехнической системы замедления срабатывания пирорезаков или крайнее реле времени в цепи нескольких последовательно включенных реле времени, каждое из которых включает пиротехническое или электрическое устройство, режущее трос рифления купола, имеющий петли.
29. Система управления парашютной системой, отличающаяся тем, что имеет закрепленные на внутренней или наружной части верхней и/или нижней поверхности крыла и/или фюзеляжа тонкие трубопроводы и/или имеет соединенные с атмосферой закрывающие клапаны в местах крепления консолей крыла к фюзеляжу, контактирующие с консолью крыла, причем эти элементы соединены параллельно между собой и последовательно с пневмореле, которое при падении давления имеет возможность включать воспламенитель системы управления.
30. Парашютная система, содержащая парашют в капсуле и систему управления им, отличающаяся тем, что капсула парашюта прикреплена шнуром или двумя шнурами ограниченной прочности к центральной части парашюта с возможностью использования в качестве источника дополнительной силы для раскрытия парашюта.
| 0 |
|
SU182214A1 | |
| ЗАГРУЗОЧНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ШАХТНЫХ ТОПОК И ПЕЧЕЙ | 1930 |
|
SU20754A1 |
| SU 1110093 A1, 20.12.2004 | |||
| СИСТЕМА СПАСЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2111899C1 |
| ДВУХРЕЖИМНЫЙ СПАСАТЕЛЬНЫЙ ПАРАШЮТ КАТАПУЛЬТНОГО КРЕСЛА | 2006 |
|
RU2310585C2 |
| ШИХТА КЕРАМИЧЕСКОГО МАТЕРИАЛА ДЛЯ ВЫСОКОЧАСТОТНЫХ КОНДЕНСАТОРОВ С ВЕЛИЧИНОЙ ТЕМПЕРАТУРНОГО КОЭФФИЦИЕНТА ЕМКОСТИ (-47 ± 30)·10град. | 1992 |
|
RU2035779C1 |
| US 5825667 A1, 20.10.1998 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

