Изобретение относится к области измерительной техники и предназначается для измерения в условиях неравномерного и нестационарного воздушного потока в рабочей части аэродинамической трубы числа Маха при аттестации аэродинамических труб, получении аэродинамических характеристик тестовых моделей для последующего их использования при аттестации алгоритмов и программ, обеспечивающих расчет аэродинамических характеристик летательных аппаратов.
В настоящее время создание воздушного потока в аэродинамических трубах сопряжено с большими материальными затратами, поэтому актуально требование минимизации времени получения экспериментальных данных требуемой, обычно высокой, точности.
При больших дозвуковых и сверхзвуковых скоростях осуществляют регистрацию сигналов датчиков статического P и полного P0 давлений, при гиперзвуковых скоростях - датчиков давлений торможения: 
Известен способ измерения среднего числа Маха, по которому в процессе проведения аэродинамического эксперимента осуществляют многократную регистрацию сигналов датчиков давлений, определяют, пользуясь этими сигналами, среднее число Маха, а затем оценивают погрешность измерения этого числа Маха (Петунин А.Н. Методы и техника измерений параметров газового потока. - М.: Машиностроение, 1996, стр. 281-284).
Однако при использовании такого способа удается измерить лишь среднее число Маха на каждой фиксированной скорости работы трубы, причем точность измерения при неравномерном и нестационарном воздушном потоке, как правило, бывает невысокой.
Известен способ измерения числа Маха, принятый за прототип, по которому в аэродинамической трубе осуществляют однократную регистрацию сигналов датчиков давлений, определяют, пользуясь этими сигналами, число Маха, а позже оценивают погрешность измерения числа Маха (Бертынь В.Р., Юшков И.И. Анализ точности измерения скоростного напора и числа М в аэродинамических трубах при дозвуковых и сверхзвуковых скоростях. - М.: Труды ЦАГИ, 1966, стр. 5.).
Однако при таком способе апостериорная оценка точности косвенно измеренного числа Маха из-за неравномерности и нестационарности потока нередко оказывается ниже требуемой. За этим следует повторный и не всегда однократный пуск аэродинамической трубы, что приводит к увеличению продолжительности аэродинамического эксперимента, а следовательно, к повышению его стоимости.
Задачей изобретения является измерение с требуемой точностью числа Маха в условиях неравномерного и нестационарного воздушного потока в рабочей части аэродинамической трубы с минимальными затратами времени на получение экспериментальных данных. Техническим результатом является измерение числа Маха с погрешностью, не превышающей заданную погрешность за минимально возможное время работы трубы.
Задача и технический результат достигаются тем, что в способе измерения числа Маха, по которому в аэродинамической трубе осуществляют однократную регистрацию сигналов датчиков давлений, выполняют параллельно и синхронно во времени два процесса. Первый процесс - осуществление однократной регистрации сигналов датчиков давлений - повторяют до тех пор, пока от второго процесса не поступит синхронизирующий знак о прекращении регистрации сигналов датчиков давлений. Второй процесс - определение числа Маха с использованием зарегистрированных последними сигналов датчиков давлений P и P0 или 
Контроль попаданий осуществляют с помощью неравенств P0≥P0 и, соответственно, P≥P или 
- для больших дозвуковых и сверхзвуковых скоростей
 ,
,  ,
,
- для гиперзвуковых скоростей
 ,
,  ,
,
где 
 ,
,
 ,
,

Δ[P], Δ[P0], 
Осуществление способа предлагаемым образом, т.е. реализация его в виде двух процессов, выполняемых параллельно и синхронно во времени, многократно обеспечивающих однократную регистрацию сигналов датчиков давлений и вслед за этим многократное определение числа Маха и контроль попадания зарегистрированных последними сигналов датчиков давлений в допуски, для них предназначенные, с тем, чтобы прекратить регистрацию сигналов датчиков давлений, когда в этом больше нет необходимости, неизвестно в измерительной технике.
На фиг. 1 представлена блок-схема устройства для осуществления данного способа; на фиг. 2, 3 и 4 приведены полученные экспериментально-расчетным путем данные, подтверждающие достоверность и эффективность результатов опытной проверки данного способа.
Устройство для осуществления способа измерения числа Маха в аэродинамической трубе содержит датчики давлений 1, измерительное устройство 2, регистрирующее устройство 3, которые являются штатными узлами пневмометрической системы, вычислительное и управляющее устройство 4, общую оперативную память 5 устройств 3 и 4 для мониторинга знаков, синхронизирующих работу этих устройств, и регистрации сигналов, поступающих от датчиков давлений, штатную для устройства 4 оперативную память 6.
Предлагаемый способ реализуется следующим образом.
Получив, например от автоматизированной системы управления аэродинамической трубой, сообщение о начале измерений, с помощью устройства 4 помещают в память 5 синхронизирующие знаки «+» и «-», посылают старт-сообщение устройству 3, а затем осуществляют мониторинг синхронизирующих знаков. Пока с помощью устройства 4 распознают знаки «+» и «-», продолжают мониторинг знаков. Если распознаны знаки «-» и «+», то с помощью устройства 4 перемещают из памяти 5 в память 6 зарегистрированные сигналы, поступившие от датчиков давлений, помещают в память 5 синхронизирующие знаки «-» и «-», обрабатывают сигналы датчиков, перемещенные в память 6, при этом определяют число Маха и допуски на давления, контролируют попадание сигналов датчиков в эти допуски. При попадании сигналов датчиков в допуски, с помощью устройства 4 посылают вышеупомянутой автоматизированной системе управления сообщение о завершении измерений и, осуществляя мониторинг синхронизирующих знаков, дожидаются знаков «-» и «+», после чего посылают стоп-сообщение устройству 3. Если сигналы датчиков в допуски не попали, то, осуществляя с помощью устройства 4 мониторинг синхронизирующих знаков, дожидаются знаков «-» и «+», после чего выполняют описанные выше операции, начиная с перемещения из памяти 5 в память 6 зарегистрированных сигналов, поступивших от датчиков давлений. С помощью устройства 3, которое начинает функционировать по старт-сообщению, поступившему от устройства 4, регистрируют в память 5 сигналы датчиков давлений, помещают в эту память синхронизирующие знаки «-» и «+», а затем начинают осуществлять их мониторинг. Пока с помощью устройства 3 распознают знаки «-» и «+», продолжают мониторинг знаков. Если распознаны знаки «-» и «+», то с помощью устройства 3 регистрируют в память 5 сигналы датчиков давлений, помещают в эту память синхронизирующие знаки «-» и «+», а затем осуществляют их мониторинг. Далее операции, выполняемые с помощью устройства 3, повторяют до тех пор, пока от устройства 4 не поступит стоп-сообщение.
Сведения о параметрах устройств, входящих в схему реализации способа, следующие.
Устройства 3 и 4 могут быть построены с использованием двух процессоров двухпроцессорного компьютера либо многоядерного процессора однопроцессорного компьютера. Однако следует принять во внимание, что процессор, используемый в устройстве 4, должен быть в несколько раз более производительным, чем процессор, используемый в устройстве 3, либо число ядер многоядерного процессора, используемых в устройстве 4, должно быть в несколько раз больше числа ядер, используемых в устройстве 3, при одинаковой производительности ядер. Объем общей оперативной памяти 5 должен быть достаточным для регистрации сигналов датчиков давлений и мониторинга синхронизирующих знаков. Под синхронизирующие знаки можно использовать два байта памяти 5 или знаковые биты машинных слов этой памяти, отведенных под сигналы датчиков давлений.
Таким образом, в данном способе измерения числа Маха в аэродинамической трубе параллельно функционируют два устройства. При реализации данного способа по представленной схеме (фиг. 1) одно устройство, входящее в состав пневмометрической системы, все время выполняет операцию однократной регистрации сигналов датчиков давлений, другое устройство все время выполняет, пользуясь всякий раз однократно зарегистрированными сигналами датчиков давлений, определение числа Маха и допусков, отвечающих этому числу Маха, контроль попадания однократно зарегистрированных сигналов датчиков давлений в допуски, при этом осуществляется с использованием общей оперативной памяти синхронизация работы обоих устройств и всякий раз при попадании сигналов датчиков давлений в допуски устройство, входящее в состав пневмометрической системы, прекращает регистрацию сигналов датчиков давлений, что минимизирует время проведения аэродинамического эксперимента. В свою очередь, определение допусков и контроль попадания однократно зарегистрированных сигналов датчиков давлений в эти допуски способствуют измерению числа Маха с требуемой точностью. Реализация данного способа по представленной схеме (фиг. 1) обеспечивает измерение числа Маха в течение одного пуска аэродинамической трубы на всех отвечающих этому пуску фиксированных скоростях потока. Помимо этого, данный способ позволяет организовать диагностический анализ, например в целях выявления того датчика, сигналы которого чаще не попадают в допуски.
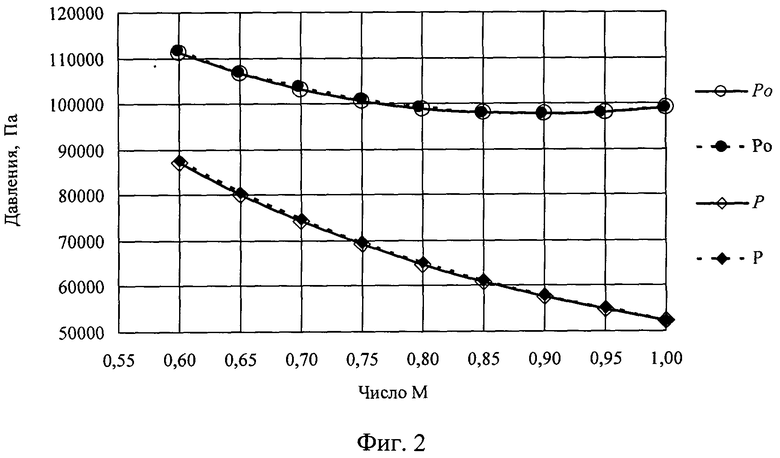
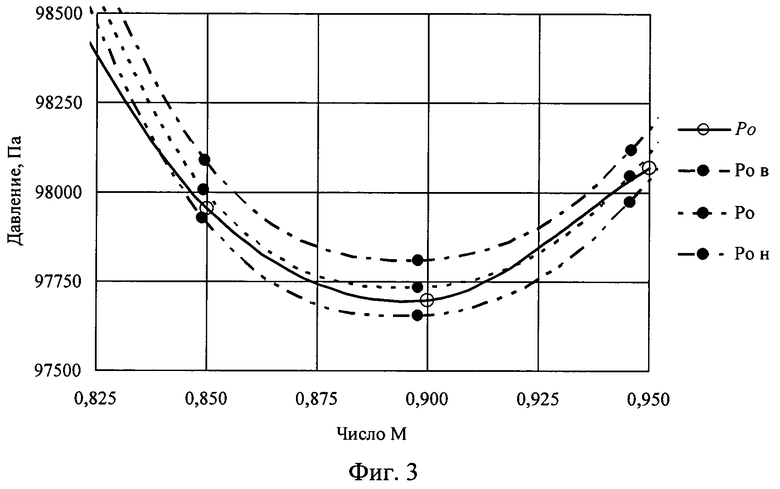
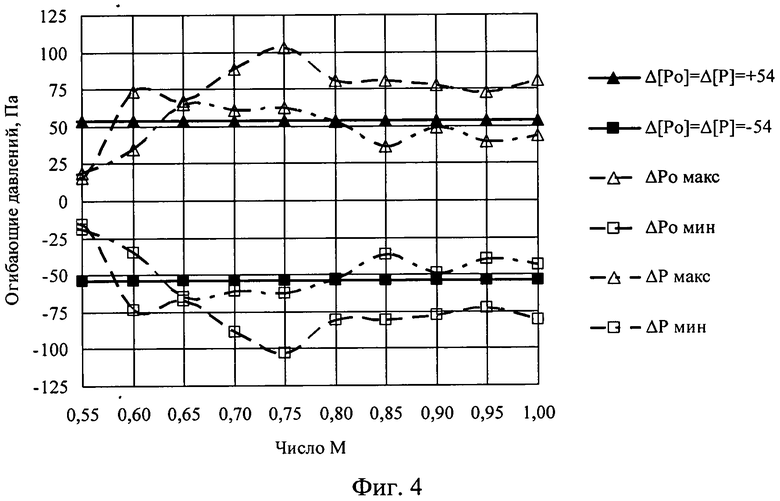
Для опытной проверки данного способа использовались сигналы датчиков давлений, полученные в аэродинамической трубе больших дозвуковых скоростей. Результаты опытной проверки при Δ[M]=0,001 и числах Маха от 0,6 до 1,0 представлены на фиг. 2. Сплошными кривыми на фиг. 2 показаны допуски, отвечающие формулам для больших дозвуковых и сверхзвуковых скоростей. Пунктирные кривые интерполируют успешно прошедшие контроль сигналы датчиков давлений. На фиг. 3 представлен крупным планом фрагмент фиг. 2 при числах Маха от 0,825 до 0,950: сплошная и пунктирная кривые, отвечающие полному давлению. Там же штрихпунктирными кривыми показаны верхняя и нижняя границы рассеивания сигналов датчика полного давления при неравномерном и нестационарном воздушном потоке. Для построения этих границ использовались многократно зарегистрированные сигналы датчика. Как показано на фиг. 4, при наличии неравномерного и нестационарного потока интервалы рассеивания сигналов датчиков полного и статического давлений заметно превышают приборные погрешности этих датчиков почти при всех числах Маха.
Формулы для определения допусков получены с использованием теоретических зависимостей (Прикладная газовая динамика / Под ред. С.А. Христиановича. - М.: Издательство ЦАГИ, 1948, стр. 71, 73; Юшков И.И. Анализ случайных погрешностей измерения параметров потока в аэродинамических трубах при больших сверхзвуковых скоростях. - М.: Труды ЦАГИ, вып. 856, 1962, стр. 5.), связывающих число Маха с сигналами датчиков давлений при больших дозвуковых и сверхзвуковых скоростях

и при гиперзвуковых скоростях

Использовались также соотношения (Юшков И.И. Анализ случайных погрешностей измерения параметров потока в аэродинамических трубах при больших сверхзвуковых скоростях. - М.: Труды ЦАГИ, вып. 856, 1962, стр. 10, 13; Петунин А.Н. Методы и техника измерений параметров газового потока. - М.: Машиностроение, 1996. - стр. 304, 305) между погрешностями измерения числа Маха и приборными погрешностями датчиков давлений


Формулы для определения допусков при больших дозвуковых и сверхзвуковых скоростях получены следующим образом. Представив зависимость (1) в виде функции P0=f0(P,M,κ), заменяем ею величину P0 в соотношении (3). Последнее с помощью алгебраических преобразований приводим к виду P=φ(M,κ,ω,Δ[P],Δ[M]). Зависимость (1), представленную в виде функции P=f(P0,M,κ), используем для приведения соотношения (3) к виду P0=ψ(M,κ,ω,Δ[P0],Δ[M]). Аналогично, пользуясь зависимостью (2) и соотношением (4), получим формулы для определения допусков при гиперзвуковых скоростях.
Данный способ обеспечивает измерение числа Маха за минимально возможное время с погрешностью, не превышающей заданную, как при неравномерном и нестационарном воздушном потоке, так и при более простых потоках вплоть до равномерного стационарного.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА | 2014 |
|
RU2568962C1 |
| ВИХРЕВОЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2556760C1 |
| Способ измерения пульсаций сверхзвукового потока и устройство для его реализации (Варианты) | 2016 |
|
RU2638086C1 |
| ДОЗВУКОВАЯ АЭРОДИНАМИЧЕСКАЯ ТРУБА С НИЗКИМ УРОВНЕМ ПУЛЬСАЦИЙ ПОТОКА ИНФРАЗВУКОВОГО ДИАПАЗОНА | 2015 |
|
RU2605643C1 |
| Способ проведения испытаний в аэродинамической трубе с моделированием влияния периодического порыва ветра | 2024 |
|
RU2830394C1 |
| Способ измерения статического давления в ближнем поле летательного аппарата вне пограничного слоя в аэродинамических трубах | 2024 |
|
RU2830838C1 |
| ДОЗВУКОВАЯ АЭРОДИНАМИЧЕСКАЯ ТРУБА С ПУЛЬСИРУЮЩЕЙ СОСТАВЛЯЮЩЕЙ СКОРОСТИ ПОТОКА | 2015 |
|
RU2603234C1 |
| ПРИЕМНИК ВОЗДУШНОГО ДАВЛЕНИЯ (ВАРИАНТЫ) | 1998 |
|
RU2152042C1 |
| РАБОЧАЯ ЧАСТЬ АЭРОДИНАМИЧЕСКОЙ ТРУБЫ | 2013 |
|
RU2547473C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗУДАРНОГО СВЕРХЗВУКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В АТМОСФЕРЕ И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1996 |
|
RU2107010C1 |
Изобретение относится к измерительной технике, в частности может быть использовано в методиках измерений, предназначенных для аттестации аэродинамических труб и получения аэродинамических характеристик тестовых моделей в целях последующего их использования при аттестации алгоритмов и программ, обеспечивающих расчет аэродинамических характеристик летательных аппаратов. Сущность: многократно осуществляют в аэродинамической трубе однократную регистрацию сигналов датчиков давлений и определяют, пользуясь этими сигналами, число Маха. При фиксированной скорости воздушного потока в аэродинамической трубе определяют момент прекращения регистрации сигналов датчиков давлений посредством контроля попадания этих сигналов в допуски, отвечающие измеренному числу Маха. Указанные операции распараллеливают на два процесса, синхронных во времени. Даны формулы для определения допусков. Техническим результатом является измерение числа Маха с требуемой точностью за минимально возможное время работы аэродинамической трубы. 4 ил.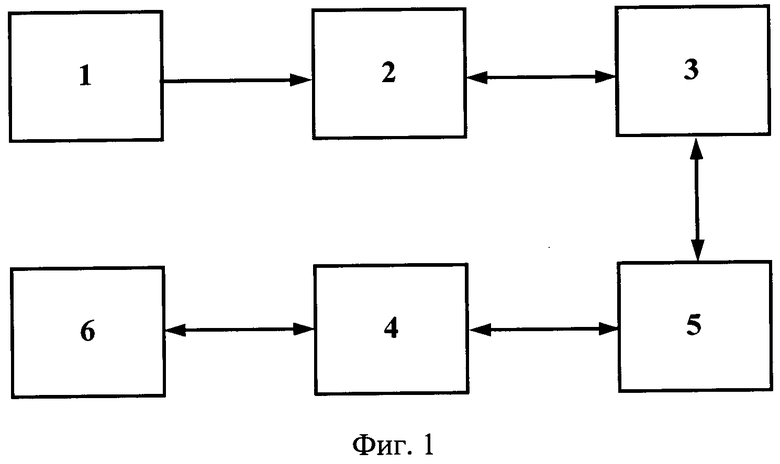
Способ измерения числа Маха, по которому в аэродинамической трубе осуществляют однократную регистрацию сигналов датчиков давлений, определяют, пользуясь этими сигналами, число Маха, а позже оценивают погрешность измерения числа Маха, отличающийся тем, что однократную регистрацию сигналов датчиков давлений и определение с использованием этих сигналов числа Маха повторяют многократно до тех пор, пока сигналы датчиков не попадут в допуски, отвечающие измеренному числу Маха, а для минимизации времени работы трубы описанные выше операции распараллеливают на два синхронных во времени процесса: в первом однократно регистрируют сигналы датчиков давлений, во втором определяют числа Маха, получают допуски и контролируют попадания сигналов датчиков давлений в эти допуски, которые получают с использованием полиномиальных зависимостей, отвечающих формулам, или непосредственно по формулам:
для больших дозвуковых и сверхзвуковых скоростей
, ,
для гиперзвуковых скоростей
, ,
где:  ,
,  , ,
, ,
,
 ,
,
Δ[P], Δ[P0], - приборные погрешности датчиков статического, полного и полного за прямым скачком уплотнения давлений соответственно, Δ[M] - заданная погрешность измерения числа Маха, ω=Δ[P0]/Δ[P], , κ - показатель адиабаты для воздуха.
| Бертынь В.Р., Юшков И.И | |||
| Анализ точности измерения скоростного напора и числа М в аэродинамических трубах при дозвуковых и сверхзвуковых скоростях., М., Труды ЦАГИ, 1966, стр.5; | |||
| Петунин А.Н | |||
| Методы и техника измерений параметров газового потока | |||
| - М.: Машиностроение, 1996., стр | |||
| ПАРОПЕРЕГРЕВАТЕЛЬ ДЛЯ ТРУБЧАТЫХ ПАРОВЫХ КОТЛОВ С ЭЛЕМЕНТАМИ, СОСТОЯЩИМИ ИЗ ДВУХ ПЕТЕЛЬ, ВВОДИМЫХ В ПРОГАРНЫЕ ТРУБЫ КОТЛА | 1916 |
|
SU281A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |

