Изобретение относится к области испытательной и измерительной техники, в частности к акустической локации, и позволяет определить координаты и вектор скорости объекта, движущегося со сверхзвуковой скоростью.
Широкий спектр задач, решаемых с помощью акустической локации, обуславливает разнообразие методов, их совершенствование и обновление. В последнее время локации источников акустических возмущений, воздушных ударных волн (ВУВ) или сверхзвуковых объектов посвящено много работ.
Известен «Способ определения местоположения стрелка на местности», патент RU №2285272, МПК 8 G01S 5/18, опубликованный 10.10.2006, позволяющий определить и указать местоположение источника выстрела (стрелка). Способ основан на регистрации ударных волн от пролетевшей сверхзвуковой пули и дульной волны от расширяющихся газов со среза ствола не менее чем тремя чувствительными элементами, закрепленными неподвижно относительно оптической оси устройств видеозаписи. При обнаружении ударной волны с помощью одного или нескольких устройств видеозаписи производится синхронная запись изображения местности. По результатам регистрации дульной волны определяют пеленг на источник звука и производят указание источника выстрела на видеокадре, соответствующем времени выстрела. Данный способ позволяет зафиксировать факт пролета пули, но не позволяет решить задачу определения ее траектории и скорости.
Известен способ определения траектории и скорости объекта, описанный в патенте US №6178141 «Акустическая система для обнаружения снайперов», МПК 8 G01S 5/18, опубликованный 23.01.2001, в котором на основе регистрации ударной волны, создаваемой сверхзвуковым снарядом или пулей, определяют их траекторию. Для обнаружения ударной волны и потока воздуха из дула огнестрельного оружия используют группу разнесенных друг от друга акустических датчиков, регистрирующих возмущение воздушной среды. Данные о времени прихода ударной волны (носового скачка уплотнения) на каждый акустический датчик и параметры зарегистрированной ударной волны используют для определения траектории и пеленга исходной точки этой траектории. При расчетах используют модель баллистики снаряда и акустического излучения, учитывающую замедление снаряда. Расположение датчиков может быть простым, например, группы из двух-трех микрофонов могут устанавливать на каждой стороне охраняемой зоны или по всей зоне могут быть распределены шесть всенаправленных микрофонов. Траекторию движения определяют по результатам регистрации параметров ударной волны и времен достижения ей чувствительных элементов. Реализация этого способа является весьма дорогостоящей. Кроме того, этот способ предъявляет высокие требования к средствам измерения параметров ударной волны, которые зачастую недостижимы. Например, при измерении амплитуды импульса ударной волны погрешность может достигать 20-50%. Это обстоятельство снижает точность определения траектории объекта данным способом.
Известен способ определения траектории и скорости объекта, летящего со сверхзвуковой скоростью и пересекающего плоскость мишени в конкретной точке, патент US №5920522 МПК 8 G01S 5/18 «Индикатор акустической ударной волны», опубликованный 06.07.1999. Регистрацию ударной волны осуществляют в нескольких фиксированных точках, не лежащих на одной прямой, вблизи указанной плоскости мишени, определяют времена задержек приема волны каждым из чувствительных элементов относительно заданного опорного (базового) момента времени. С использованием этих данных определяют точку попадания, угол падения и сверхзвуковую скорость объекта. В данном способе существует ряд предопределенных условий, связанных с взаимным положением стрелка и мишени, оборудованной набором чувствительных элементов. В большинстве применений предполагают, что стрельба (полет объектов) происходит в условиях площадки, включающей определенные позиции стрелков и плоскости мишени, а угол пересечения плоскости мишени имеет только горизонтальную составляющую. Применение этого метода в условиях, когда пролетающий объект имеет произвольное положение траектории относительно чувствительных элементов и мишени, приведет к недостоверным результатам. Данный способ является наиболее близким по технической сути и решаемой задаче.
Предлагаемый способ позволяет шире посмотреть на задачу локации объектов, летящих со сверхзвуковой скоростью, и определить траекторию и скорость движения объекта вне зависимости от взаимного положения чувствительных элементов и движущегося объекта. Такая ситуация часто возникает в области испытательной техники при отработке и испытаниях новых образцов летающих объектов. Траектория опытных образцов часто непредсказуема, а надежная информация о ней способствует повышению эффективности процесса отработки и дальнейшему совершенствованию этих объектов.
Техническая задача, на решение которой направлено заявляемое изобретение, заключается в определении пространственных координат точки, принадлежащей траектории полета объекта, углов, образуемых вектором скорости с осями выбранной системы координат, и модуля вектора скорости в определенной точке траектории.
Техническим результатом использования изобретения является надежное определение параметров движения объекта на участке возбуждения носового скачка уплотнения, достигнувшего измерительные точки (ИТ) в виде воздушной ударной волны, включая пространственные координаты точки, принадлежащей траектории, величину и направление вектора скорости объекта в ней вне зависимости от взаимного расположения траектории объекта и ИТ, в том числе и на необорудованных площадках, с более высокой точностью при относительной простоте и малых затратах.
Технический результат достигается в заявляемом способе следующим образом. В нескольких ИТ с известными координатами регистрируют ударную волну (УВ), создаваемую сверхзвуковым движением объекта и распространяющуюся в пространстве в виде конуса Маха. По результатам регистрации УВ определяют задержки распространения УВ до каждой ИТ относительно ИТ, выбранной за базовую и определяют траекторию и скорость объекта на основании полученных данных. В отличие от прототипа ИТ размещают в виде пространственной фигуры (ПФ), в области поиска задают предполагаемые параметры движения объекта путем задания координаты точки траектории, величин вектора скорости и углов, образуемых им с осями выбранной пространственной системы координат, для предполагаемых параметров движения рассчитывают координаты точек, в которых должен находиться объект в момент достижения УВ каждой ИТ. На основании заданной величины вектора скорости объекта и рассчитанных координат точек, в которых должен находиться объект, вычисляют времена его движения между рассчитанными точками, которые сравнивают с соответствующими задержками распространения УВ до каждой ИТ относительно ИТ, выбранной за базовую, за траекторию и скорость объекта принимают такие параметры, для которых разница расчетных времен и определенных задержек минимальна. В некоторых случаях может быть размещена РЛС, по результатам измерений которой задают величину вектора скорости объекта. Величина вектора скорости объекта может быть задана по результатам регистрации ударной волны. В этих случаях в расчетах используется определенное таким образом значение скорости объекта, что ускоряет вычисления.
Размещение ИТ в виде пространственной фигуры позволяет получать задержки регистрации в ИТ ударной волны, взаимные соотношения которых зависят от взаимного расположения в пространстве фигуры и движущегося объекта. Заданием в области поиска предполагаемых параметров движения объекта, а именно пространственных координат точки траектории, величины вектора скорости и углов, образуемых им с осями выбранной системы координат, расчетом для предполагаемых параметров движения координат точек, в которых должен находится объект в момент достижения ударной волной каждой ИТ, получают пространственную модель движения объекта, что позволяет повысить точность локации объекта, движущегося со сверхзвуковой скоростью, по сравнению с прототипом. Измерительные средства и вспомогательное оборудование компактно и может быть в короткие сроки развернуто и подготовлено к измерениям, в том числе и на необорудованных площадках.
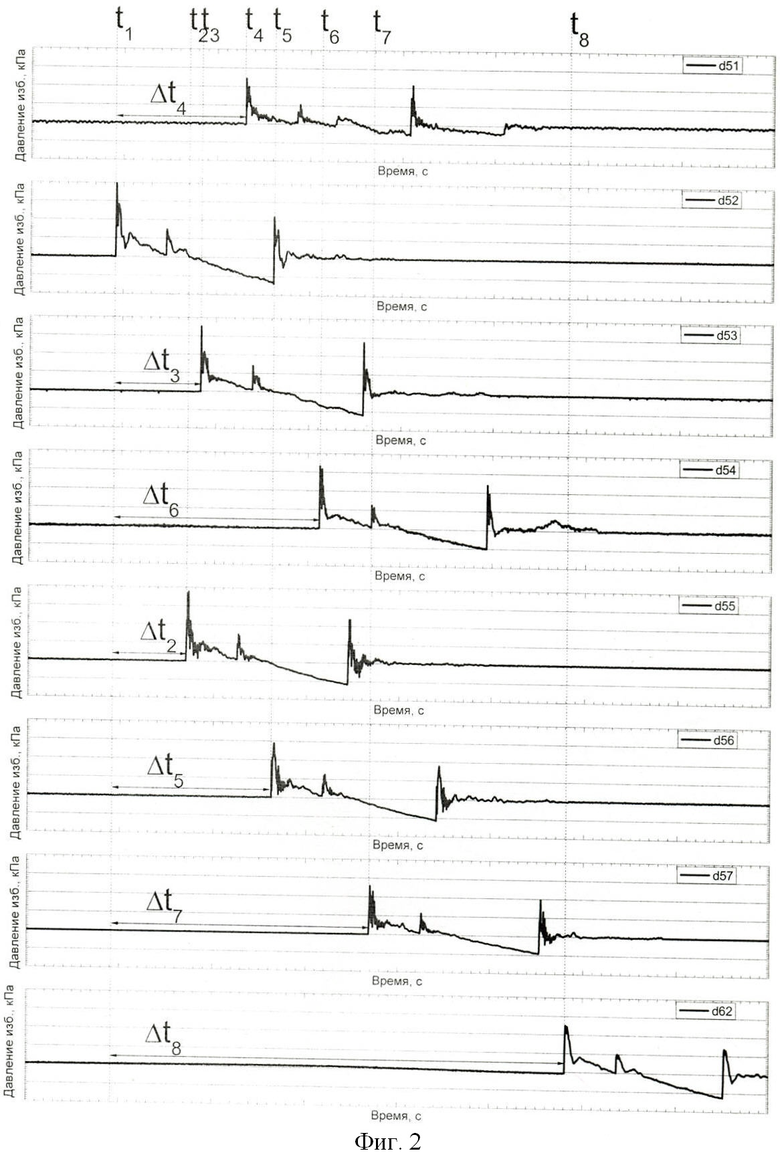
Способ поясняется чертежами. На фиг.1 приведена схема постановки измерений, на фиг.2 - графики измерений носового скачка уплотнения с выделением исходных данных для расчета; на фиг.3 - схема, поясняющая алгоритм расчета, на фиг.4 - одна из возможных схем оптимизации расчета, на фиг.5 - таблица исходных данных для расчета, фиг.6 - сопоставление результатов определения траектории и вектора скорости оптическим и предлагаемым способом.
Способ определения траектории и скорости объекта реализуется следующим образом. В месте проведения испытаний размещают ИТ. В каждой ИТ размещают датчик ударной волны (Фиг.1 - ИТ1, ИТ2, …, ИТ8) При установке ИТ определяют их координаты или взаимное расположение. ИТ размещают в виде пространственной фигуры. Для ее создания целесообразно использовать жесткий легкосплавный каркас 1, например в форме куба. Каркас обеспечит постоянство взаимного расположения ИТ.
В ходе испытаний в ИТ регистрируют ударную волну, создаваемую объектом. Определяют моменты времени ti соответствующие достижению каждой ИТ ударной волной от объекта (Фиг.2). С использованием значений ti определяют интервалы времени Δti, представляющие собой величину задержки достижения ударной волной каждой ИТ относительно ИТ, выбранной за базовую. В предпочтительном варианте базовой может считаться ИТ, которую ударная волна достигла первой.
Движение объекта в пространстве как материальной точки может быть описано 7 параметрами |Vои| - величина скорости ОИ, αх, αy, αz - углы между положительными направлениями выбранной прямоугольной системы координат и вектором скорости Vои, Х0, Y0, Z0 - координаты точки 2, принадлежащей траектории (точки пролета). С использованием этих данных уравнения движения объекта могут иметь вид (1).
Для поиска решения определяют область поиска точки пролета и вектора скорости в ней. Из области поиска выбирают предполагаемые параметры движения объекта Х0, Y0, Z0, αх, αy, αz, |Vои| и с использованием этих значений в уравнении (1) рассчитывают координаты точек S'i, в которых должен находится объект в момент достижения ударной волной каждой ИТ. Затем на основании заданной величины вектора скорости объекта |Vои| и рассчитанных координат точек S'i вычисляют Δt'i - времена движения объекта между этими точками, которые сравнивают с Δti - соответствующими фактически измеренными задержками распространения ударной волны до каждой ИТ относительно ИТ, выбранной за базовую. В качестве решения принимается набор значений параметров движения Х0, Y0, Z0, αх, αу, αz, |Vои|, при которых выражение (2) принимает минимальное значение.

Описанные расчеты выполняются следующим образом. Для набора параметров движения Х0, Y0, Z0, αх, αy, αz, |Vои| составляют систему уравнений (1), которые описывают движение объекта в окрестности размещенных ИТ (Фиг.1). Для каждой ИТ (Фиг.3) находится основание перпендикуляра Pi(Xpi;Ypi;Zpi), опущенного на прямую, описываемую уравнениями (1), путем решения системы уравнений (3) относительно (Xpi;Ypi;Zpi).

С использованием конкретного значения скорости объекта |Vои| из диапазона предполагаемых значений и рассчитанной длины перпендикуляра (расстояния от i-той ИТ до прямой) определяется расстояние Li от основания перпендикуляра до точки нахождения объекта в момент достижения волной i-той ИТ (4).

где pi - расстояние от i-той ИТ до прямой, описывающей движение объекта; αм=arcsin(Cзв/|Vои|) - угол Маха, Cзв, [м/с] - скорость распространения звука в воздушной среде. Сзв определяется по формуле, известной из технической литературы: Сзв=20.084*[Тв+273]1/2, Тв - температура воздушной среды.
Расстояние Li и уравнения движения (1) позволяют определить предполагаемые координаты объекта в точке S'i(XSi, YSi, ZSi) - в момент достижения ударной волной 1-той ИТ по формулам (5).
Для каждой ИТ определяют расстояния ΔS', преодоленные объектом с момента регистрации ударной волны в базовой ИТ до момента регистрации ударной волны в i-той ИТ. Рассчитывают величины задержек распространения ударной волны до каждой ИТ относительно ИТ, выбранной за базовую - Δt'i (6).

Вычисленные задержки Δt'i с соответствующими фактически измеренными - Δti включаются в выражение (2).
Итерационный процесс, включающий определение вектора параметров движения и выполнение описанных вычислений, продолжают до выполнения условия минимизации выражения (2).
В целях сокращения количества итераций применяют ряд методов, позволяющих сократить время поиска решения. Например, с использованием времен регистрации ВУВ в четырех ИТ определяют направляющий вектор n квазиплоскости ударной волны, являющейся фрагментом конуса Маха, образуемого носовым скачком уплотнения, а также фактическую скорость распространения фронта ударной волны. Этот прием с использованием ожидаемого диапазона скоростей позволяет уменьшить область поиска направления движения объекта. Для двумерного случая это проиллюстрировано на фиг.4. Этот и другие приемы, оптимизирующие вычисления, в совокупности с методами автоматического детектирования сигналов с датчиков обеспечивают удовлетворительную сходимость решения и позволяют определять параметры траектории непосредственно после испытаний.
В ходе расчетов предполагают, что скорость объекта на участке возбуждения ударной волны, достигнувшей датчиков, была постоянной, и объект двигался с постоянной скоростью. С учетом размеров пространственной фигуры (~3 м) в большинстве случаев эти предположения не снижают точность расчетов. Однако, если в области размещения пространственной фигуры объект движется по криволинейной траектории, то точность расчетов может оказаться ниже прогнозируемой. В этом случае можно увеличить количество датчиков, модифицировать уравнения движения (1), включив в число неизвестных ускорения по осям выбранной системы координат и баллистический коэффициент, описывающий изменение скорости, обусловленное силами сопротивления воздушной среды. Это позволит сохранить точность на приемлемом уровне и получить дополнительную информацию о параметрах движения.
Для отработки и применения предлагаемого способа использовались общеизвестные технические средства.
1. Датчики измерения импульсных давлений воздушной среды (например, содержащиеся в Государственном реестре средств измерений, датчики ИКЛЖ 406233. 001).
2. Адаптер сбора аналоговых данных (ADLINK Technology Inc., 64-канальный адаптер аналогового ввода-вывода DAQ-2204).
3. Экранированные измерительные линии, соединяющие датчики и схему запуска с регистратором (кабель ГПЭУ 6/012).
4 Электронный тахеометр для геодезической привязки ИТ к выбранной системе координат (TRIMBLE М3).
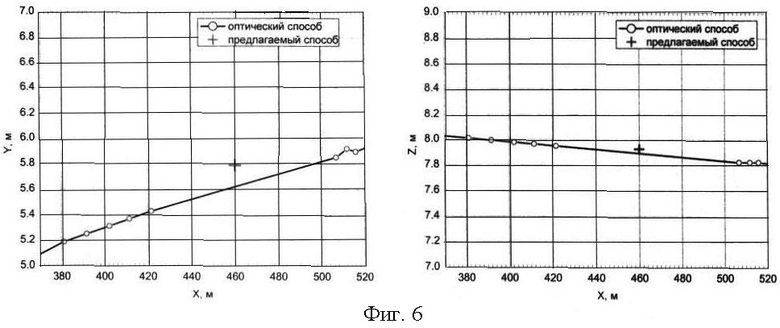
Работоспособность способа и его возможности подтверждены в ряде экспериментов, в которых параллельно применялся оптический метод определения координат объекта и направления его движения в пространстве [ГОСТ Р51271-99 «Изделия пиротехнические Методы сертификационных испытаний» (раздел 6.4, 6.5)]. При сравнении с оптическим способом заявляемый способ показал хорошее совпадение результатов. Сопоставление результатов определения координат объекта испытаний приведено на фиг.6.
Определение траектории и скорости объекта при сверхзвуковом полете объекта производилось следующим образом. Согласно заявляемому способу была выбрана схема установки ИТ, при которой они образовывали пространственную фигуру. В каждой ИТ было размещено по одному датчику измерения импульсных давлений воздушной среды и выполнена геодезическая привязка ИТ к системе пространственных координат измерительной площадки (см. табл. фиг.5). По окончании проверок был произведен запуск объекта испытаний.
Датчиками в ИТ1, ИТ2, …, ИТ14, подключенными к регистратору на базе ПЭВМ, была зарегистрирована ударная волна от объекта, проиллюстрированная на фиг.2.
Определены моменты времени t1, …, t14, соответствующие достижению ударной волной каждой из ИТ, соответственно ИТ1, …, ИТ14 (см. фиг.2 и табл. фиг.5).
ИТ2 выбрана за базовую.
С использованием величин t1, …, t14 определены интервалы времени Δti, соответствующие задержке распространения ударной волны относительно ИТ2, выбранной за базовую (фиг.5).
Координаты ИТ и интервалы времени Δti являются исходными данными для дальнейших расчетов. Исходя из ожидаемой области полета объекта выбраны области поиска. Начальные размеры области поиска в данном случае были определены в виде куба, центром которого является базовая ИТ2. Сторона куба равна удвоенному максимальному удалению объекта от пространственной фигуры, образуемой ИТ. Для данного эксперимента размер ребра куба составил - 2*Rmax=2*50 м=100 м. Диапазон изменения скорости выбирается исходя из ожидаемой скорости объекта. Исходя из условий постановки испытаний диапазон изменения скорости 600-1200 м/с. На диапазон углов, определяющих направление движения объекта, на начальном этапе не накладывается никаких ограничений. Такой выбор метода и начальных условий (границ) поиска позволяет определять параметры движения объекта, движущегося в любом направлении относительно пространственной фигуры, образуемой ИТ.
В ходе расчета фиксируют набор параметров Х0, Y0, Z0, αх, αy, αz, |Vои|, при котором значение выражения (2) принимает минимальное значение. Сходимость решения обеспечивается применением численных методов решения на различных стадиях расчета.
В результате расчетов были определены следующие параметры движения ОИ на участке возбуждения носового скачка уплотнения, достигнувшего ИТ: Х0=460 м, Y0=5.79 м, Z0=7.93 м, αx=0°, αy=90°, α=90°, |Vои|=1022.5 м/с.
В ходе испытаний скорость ОИ была измерена доплеровской РЛС и оценена по результатам регистрации ударной волны. По результатам измерений доплеровской РЛС скорость ОИ в окрестности ИТ составила |Vои|РЛС=1023 м/с, а по результатам регистрации ударной волны скорость ОИ в окрестности ИТ составила |Vои|УВ=1022.52 м/с. Таким образом, значения скорости ОИ, полученные в расчете, с помощью РЛС и по результатам измерения ударной волны совпадают с допустимой погрешностью. В соответствии с п.2 или п.3 формулы изобретения был выполнен расчет с использованием скорости ОИ как известной величины, определенной по результатам измерений доплеровской РЛС или по результатам регистрации ударной волны. Время расчета параметров движения ОИ в данном случае сократилась на 30%.
Как видно из фиг.6, рассчитанные параметры движения хорошо согласуются с результатами оптических измерений. Интерполяция результатов оптических измерений позволяет определить отклонения значений параметров движения ОИ, полученных различными способами, которые в рассматриваемом случае составили ΔY0=0.17 м, ΔZ0=0.04 м, Δαх=0.295°, Δαy=-0.282°, Δαz=0.085°, при расстоянии до траектории объекта свыше 5 метров. Совершенствование методики измерений позволит повысить достигнутую точность.
При практическом применении способа неоднократно подтверждена надежность регистрации ударной волны, сопровождающей сверхзвуковое движение объекта и технический результат, заключающийся в надежном определении пространственных координат точки, принадлежащей траектории, величины и направления вектора скорости объекта в ней, эффективности способа вне зависимости от взаимного расположения траектории объекта и ИТ, возможности его применения на необорудованных площадках, более высокой точности, относительной простоте и малых затратах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ВСТРЕЧИ ОБЪЕКТА ИСПЫТАНИЯ С ПРЕГРАДОЙ | 2014 |
|
RU2547839C1 |
| ЗАЩИЩЕННЫЙ СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2019 |
|
RU2713584C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2008 |
|
RU2377594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА ИСПЫТАНИЙ В МОМЕНТ ЕГО ПОДРЫВА | 2005 |
|
RU2285890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА ИСПЫТАНИЙ В МОМЕНТ ЕГО ПОДРЫВА | 2006 |
|
RU2339052C2 |
| СПОСОБ ЮСТИРОВКИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ ОРИЕНТАЦИИ | 2014 |
|
RU2555515C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |



Изобретение относится к области испытательной и измерительной техники, в частности к акустической локации, и позволяет определить координаты и вектор скорости объекта, движущегося со сверхзвуковой скоростью. Способ заключается в регистрации ударной волны (УВ), создаваемой сверхзвуковым движением объекта и распространяющейся в пространстве в виде конуса Маха, в нескольких измерительных точках (ИТ) с известными координатами, образующих пространственную фигуру, определении по результатам регистрации УВ задержки ее распространения до каждой ИТ относительно ИТ, выбранной за базовую, расчете координат точек, в которых должен находиться объект в момент достижения УВ каждой ИТ с использованием предполагаемых параметров движения, вычислении интервалов времени, необходимых объекту на преодоление расстояния между рассчитанными точками и сопоставлении их с определенными задержки распространения УВ до каждой ИТ. За траекторию и скорость объекта принимают такие параметры, для которых разница расчетных времен и определенных задержек минимальна. В некоторых случаях величина скорости объекта может быть определена по результатам радиолокации или по результатам измерений ударной волны. Достигаемым техническим результатом изобретения является надежное определение параметров движения объекта. 2 з.п. ф-лы, 6 ил.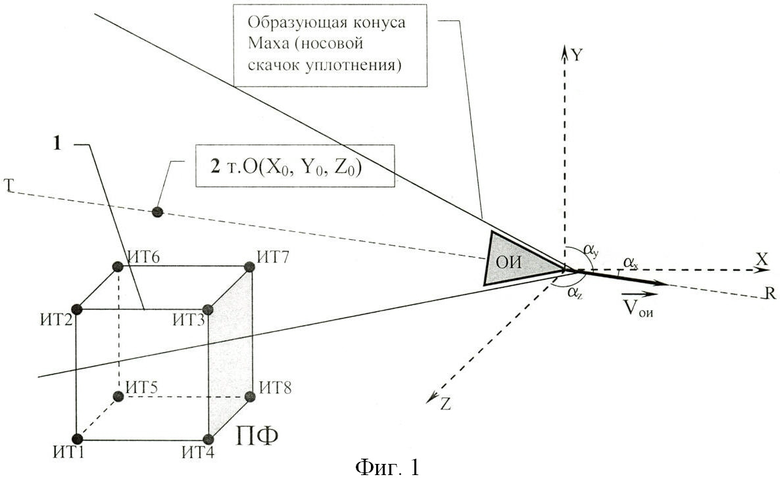
1. Способ определения траектории и скорости объекта, включающий регистрацию ударной волны, создаваемой объектом в нескольких измерительных точках с известными координатами, определение задержек распространения ударной волны до каждой измерительной точки относительно измерительной точки, выбранной за базовую, определение траектории и скорости объекта на основании полученных данных, отличающийся тем, что измерительные точки размещают в виде пространственной фигуры, в области поиска задают предполагаемые параметры движения объекта путем задания координат точки траектории, величин вектора скорости и углов, образуемых им с осями выбранной системы координат, для предполагаемых параметров движения рассчитывают координаты точек, в которых должен находиться объект в момент достижения ударной волной каждой измерительной точки, на основании заданной величины вектора скорости объекта и рассчитанных координат точек, в которых должен находится объект, вычисляют времена его движения между рассчитанными точками, которые сравнивают с соответствующими определенными задержками распространения ударной волны до каждой измерительной точки относительно измерительной точки, выбранной за базовую, за траекторию и скорость объекта принимают такие параметры, для которых разница расчетных времен и определенных задержек минимальна.
2. Способ по п.1, отличающийся тем, что дополнительно размещают РЛС, по результатам измерений которой задают величину вектора скорости объекта.
3. Способ по п.1, отличающийся тем, что по результатам регистрации ударной волны задают величину вектора скорости объекта.
| US 5920522 А, 06.07.1999 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА ИСПЫТАНИЙ В МОМЕНТ ЕГО ПОДРЫВА | 2005 |
|
RU2285890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА ИСПЫТАНИЙ В МОМЕНТ ЕГО ПОДРЫВА | 2006 |
|
RU2339052C2 |
| US 5241518 Ф, 31.06.1993 | |||
| WO 2009048500 A2, 16.04.2009 | |||
| US 2008170472 A1, 17.07.2008. | |||

