Область техники
Изобретение относится к авиационной технике, в частности к способам спасения экипажа, пассажиров и грузов с летательного аппарата (ЛА).
Уровень техники
Из уровня техники существуют различные патенты и схемы, направленные на реализацию спасения пассажиров и грузов и основанные в целом на уменьшении скорости падения ЛА до его соприкосновения с землей. Известен способ спасения ЛА, основанный на его спуске на парашюте и создании парирующего момента отклонением элеронов для поддержания заданного направления при парашютировании относительно вертикальной оси. Как известно, при использовании такого способа спасения ЛА необходимо обеспечить парашютом весьма большой площади, особенно для крупных летающих конструкций, для создания требуемого тормозного усилия, что добавляет лишний вес и требует значительного объема для размещения этого парашюта на борту ЛА. К данному способу относятся несколько изобретений, к примеру. патент RU 2211175 С2, опуб. 27.08.2003, где используются ракеты для ускорения выброса парашюта.
Известен другой способ спасения, заключающийся в выбросе отсеков пассажирского салона в качестве отдельных герметичных капсул, например, согласно международному патенту WO 2012054002 А1, опуб. 26.04.2012. Данный способ аварийной эвакуации пассажиров с авиатранспорта основан на использовании салона в виде отдельных герметичных капсул с парашютами. Используют авиатранспорт, который выполнен с междукапсульными переходами и снабжен люками, предназначенными непосредственно для каждой капсулы, трубчатыми направляющими, которые закреплены на гибких опорах и пневмоаккумулятором. При аварийной ситуации отцепляют соединительные междукапсульные переходы, после чего пассажиров автоматически фиксируют в пассажирских креслах капсулы. Выброс капсул происходит при открытии люков. Каждая капсула оснащается индивидуальными средствами для жизнеобеспечения пассажиров и безопасности посадки.
Известным недостатком данного технического решения является усложнение летающей конструкции, что приводит к снижению надежности ЛА и системы эвакуации. К тому же вес эвакуационной конструкции является достаточно большим, что влияет на экономичность полетов.
Наиболее близким по технической сущности к заявляемому изобретению является международный патент WO 2007096689 В1, опуб. 22.02.2006, в котором предлагается для поглощения ударных нагрузок установить воздушные подушки над отведенными частями планера ЛА. Дополнительно ЛА оснащают многими сравнительно маленькими парашютами, установленными в различных отсеках фюзеляжа, целью которых является уменьшение скорости снижения.
Известным недостатком изложенного технического решения является приобретение ЛА большого веса, что отражается на его экономичности при конструировании и полете. К тому же надежность конструкции снижается из-за осложнения системы выброса подушек и парашютов.
Раскрытие изобретения
Задачей, на которую направлено изобретение, является спасение экипажа, пассажиров и грузов, перевозимых ЛА.
Достигаемый технический результат от применения предложенного способа заключается в создании экономичного способа торможения ЛА при аварийном снижении путем уменьшения веса требуемого спасательного оборудования путем применения реверса ГТД в качестве генератора большого продольного тормозного усилия, что в целом приводит к снижению ударной силы с поверхностью посадки, в результате чего расширяется диапазон аварийных ситуаций ЛА, при которых становится реальным спасение экипажа, пассажиров и грузов.
Технический результат достигается тем, что способ управления снижением пассажирского ЛА в аварийной ситуации включает в себя выбрасывание парашютной системы, состоящей из тормозного и балансирующего парашютов, где сначала выбрасывается тормозной парашют, размещенный в отсеке на хвостовой части фюзеляжа, причем система автоматического управления (САУ) управляет парашютной системой, которая дополнительно присоединена к системе управления газотурбинного двигателя (ГТД) и вариометру пилотской кабины, при этом САУ включает реверсный режим работы ГТД для генерации большого тормозного усилия в последние секунды до прикосновения с поверхностью земли. Такой подход способствует уменьшению веса и объема требуемого тормозного парашюта, поскольку площадь тормозного парашюта зависит от коэффициента реверсирования ГТД. Далее на определенной высоте САУ дает сигнал о выбросе балансирующего парашюта, находящегося в отсеке на передней части фюзеляжа, работающего на создание вращающего момента с целью приведения ЛА к горизонтальному положению, при котором распределяются ударные нагрузки по всему нижнему корпусу и выпущенным шасси для равномерности их поглощения.
Краткое описание чертежей
Реализация данного изобретения далее излагается со ссылкой на прилагаемые чертежи, на которых:
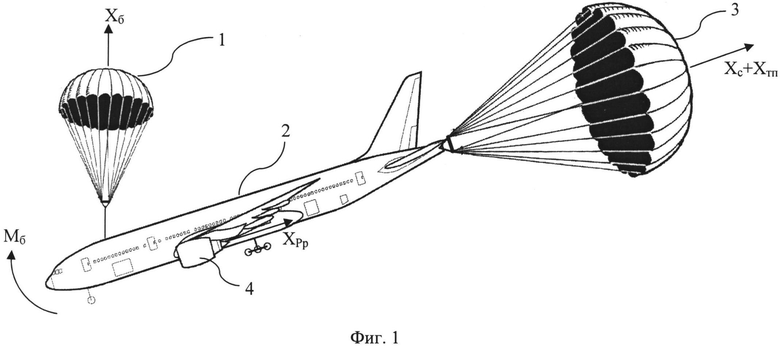
фиг. 1 - схематическое изображение снижающего ЛА в этапе приземления с выпущенными парашютами при включении реверса газотурбинных двигателей.
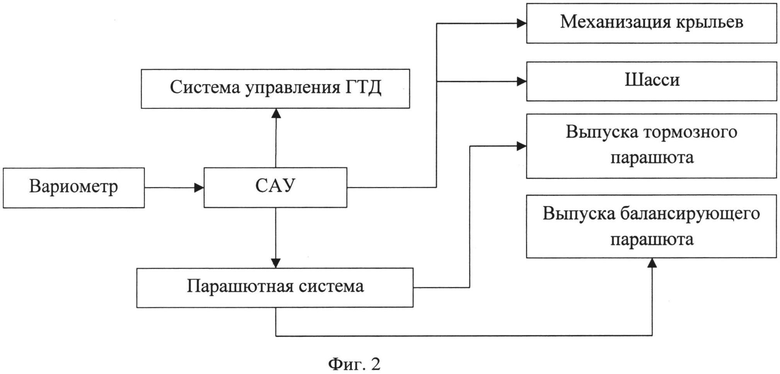
фиг. 2 - блок-схема систем, входящих в управление ЛА при снижении во время аварийного приземления.
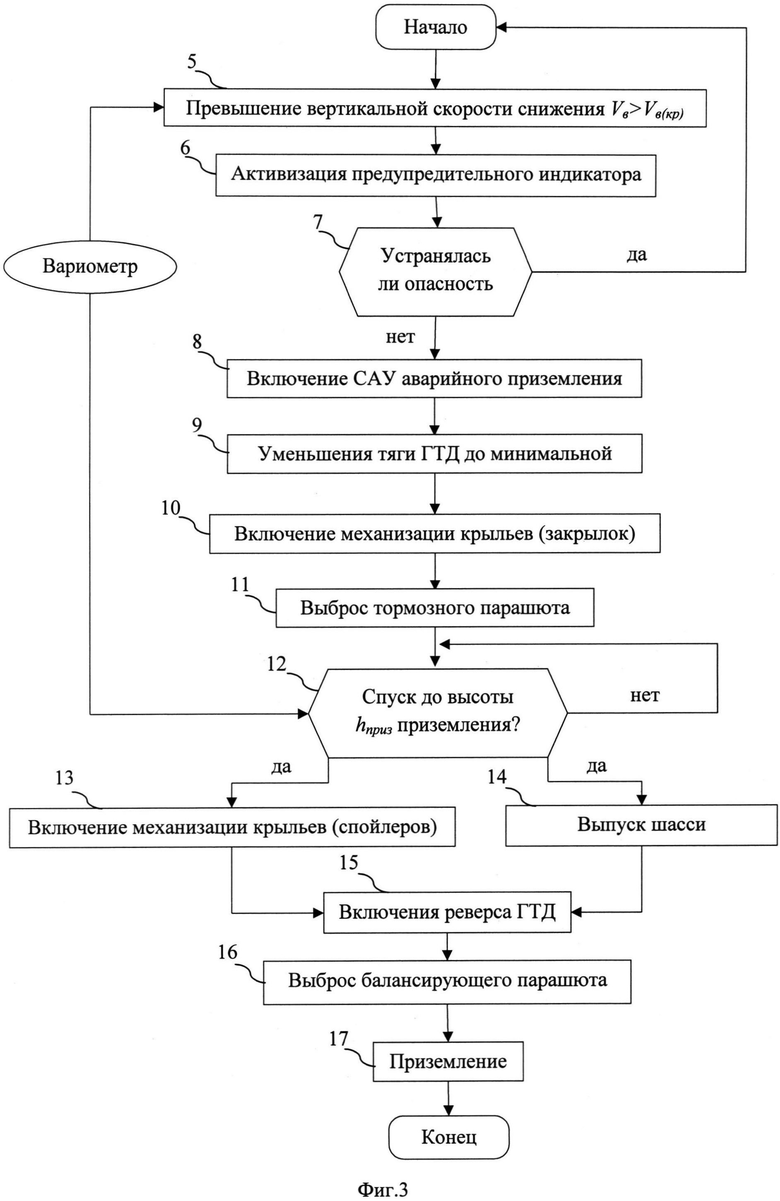
фиг. 3 - блок-схема процессов управления снижением ЛА в аварийной ситуации.
фиг. 4 - этапы управления снижением ЛА в зависимости от высоты над поверхностью земли.
Система управления снижением летательного аппарата (ЛА) 2, по сути, включает в себя прибор для индикации вертикальной скорости ЛА (Вариометр), присоединенный к системе автоматического управления (САУ) аварийного приземления, которая контролирует в чрезвычайных ситуациях совокупность аварийных подсистем. САУ находится в соединении с системой управления ГТД для реализации автоматического контролирования тяги силовой установки при снижении ЛА 2 на разных этапах. К тому же, САУ дополнительно присоединяется к парашютной системе, состоящей из тормозного парашюта 3, находящегося в отсеке на хвостовой части фюзеляжа, обладающего сравнительно большой площадью, которая в свою очередь зависит от количества производимой газотурбинными двигателями 4 обратной тяги. ЛА 2 также снабжен балансирующим парашютом 1, использующимся для создания необходимого вращающего момента на определенной высоте, что приводит к безопасному приземлению на нижнюю частью ЛА 2 и поглощению некоторой ударной нагрузки амортизаторами шасси вместе с нижним корпусом фюзеляжа, вследствие чего осуществляется задача спасения жизни экипажа и пассажиров.
Система работает следующим образом: возвращаемся к фиг.3, при обнаружении резкой вертикальной скорости, направленной к поверхности земли (этап падения, см. фиг.4) вариометром по шагу 5, установленным на ЛА 2, вводится, как правило, предупредительный сигнал (т.е. звук, свет и т.п.) пилоту соответствующим индикатором для устранения данного безопасного состояния, шаг 6. Для осуществления заданной нами функции, заключающейся в автоматическом управлении ЛА 2 во время возникновения аварийных ситуаций, прибор индикации вертикальной скорости (вариометр) присоединяется к системе автоматического управления (САУ) (см. фиг.2), которая в своею очередь должна быть запрограммирована так, чтобы начинать процесс автоматического управления через определенное время, называемое «период предупреждения после запуска предупреждения». В течение такого периода пилоту необходимо взять на контроль ЛА 2 и восстановить нормальную скорость полета, шаг 7. В случае устранения безопасности, предупредительные сигналы отключаются, затем система возвращается к нормальному состоянию. Но в случае того, что летный экипаж за период предупреждения не смог справиться с данным опасным состоянием и взять контроль над ЛА 2, автоматически управление всей летающей конструкцией передается САУ, которая немедленно действует на выполнение автоматического аварийного приземления, шаг 8.
Соответственно, по команде бортового компьютера, САУ выполняет перечень процессов, из которых увеличение тормозных усилий (т.е. увеличение лобового сопротивления ЛА 2), реализуемых путем уменьшения тяги ГТД 4 до минимальной допустимой тяги по шагу 9, где в следующем процессе включается механизация крыльев, в частности, закрылок соответственно шагу 10 для обеспечения некоторой управляемости подъемной силы, направленной на выполнение плавного планирования. Такой подход служит для предотвращения вертикального падения ЛА 2, при котором весьма усложняется его управление. Следовательно, как только ЛА 2 начинает планирование, выполняется шаг 11 САУ аварийного приземления, как показано на фиг.3, по которому выбрасывается тормозной парашют 3 из отсека, находящегося в хвостовой части фюзеляжа. Площадь парашюта 3 зависит от максимальной обратной тяги ГТД 4 и веса ЛА 2.
Данный этап полета называется спуском, см. фиг 4. Преимущество подхода, в котором используется реверс ГТД 4 в качестве генератора продольного большого сопротивления, заключается в уменьшении веса и размера требуемого тормозного парашюта 3 путем комбинирования суммы всех лобовых сопротивлений планера ЛА 2, в том числе реверсного сопротивления от ГТД 4 и сопротивления, производимого от тормозного парашюта 3. Как показывают расчеты, степень реверсирования тяги зависит от количества отклоняемой массы газа и от угла отклонения потока, также от потери скорости истечения в реверсном устройстве, следовательно, коэффициент реверса тяги (Рр) составляет 0,4-0,6 [1]. Это значит, что в случае достижения коэффициента 0,6 при реверсировании ЛА нуждается только в тормозном парашюте 3, площадь которого в совокупности с системой механизации способна обеспечить 0,4 процента лобового (тормозного) сопротивления для реализации достаточного торможения до прикосновения с землей. Такой подход приводит к существенному уменьшению ударных нагрузок. Выброс тормозного парашюта может быть исполнен с помощью электрического или гидравлического замка, управляемого САУ.
Из соображения безопасности и надежности механизма тормозного парашюта 3, его тросы, которые могут быть изготовленными из металла или подобного вещества для восприятия большой аэродинамической нагрузки, прикрепляются к внутренней конструкции фюзеляжа, например, к шпангоутам и лонжеронам, чтобы избежать вероятности разрушения или отрывания хвостовой части фюзеляжа. Тем временем, САУ должна быть запрограммирована так, чтобы не реагировать на какие-либо манипуляции в пилотской кабине, в том числе отключить возможность ручного управления ЛА 2, поскольку такое может привести к недопустимому повреждению механизма парашютной системы, к примеру, в результате отклонения элеронов на определенный угол выполняется крен ЛА 2 в соответствующем направлении, но при этом тросы тормозного парашюта могут переплетаться, вызывая неэффективность или неисправность данного устройства.
На фиг.4 показан этап спуска ЛА до определенной высоты hприз (высота приземления), которая различается в зависимости типа каждого ЛА 2, другими словами, зависит от характеристик ЛА 2 и его ГТД 4. Как только вариометр обнаруживает спуск ЛА 2 до требуемой высоты приземления hприз, отправляется сигнал бортовому компьютеру, в соответствии с которым САУ выполняет последовательность процессов. Высотой приземления hприз является высота, на которой данному ЛА 2 возможно совершить ряд процессов, такие как выпусок шасси (шаг 14), включение механизации крыльев, служащих для увеличения лобового сопротивления «спойлеров» (шаг 13), затем включение реверса ГТД 4 (шаг 15) и выброс балансирующего парашюта 1 (шаг 16), причем все изложенные процессы совершаются последовательно за максимально короткое время до прикосновения ЛА 2 с землей. Согласно блок-схеме на фиг.3 подшаг 13, впервые включаются механизация крыльев, служащая для гашения подъемной силы, т.е. спойлеры, работающие на повышение коэффициента лобового сопротивления ЛА 2, одновременно, автоматически, выполняется выпуск шасси по шагу 14 для того, чтобы создавать дополнительное сопротивление, т.е. тормозное усилие. С другой стороны, шасси тоже выпускаются на заданной высоте hприз для амортизации ударной нагрузки ЛА 2, возникающей при ударе с поверхностью посадки. Конструкция шасси, включая стойки, амортизаторы, а также нижний корпус фюзеляжа могут деформироваться в результате поглощения ударных сил. Для сохранения жизни с минимальными возможными травмами эта деформация не должно превышать допустимые пределы.
На следующем этапе по сигналу бортового компьютера САУ включает реверсный режим работы ГТД 4 до максимальной их тяги (см. фиг.1), шаг 15. Вследствие включения реверса ГТД 4 до максимальной тяги на такой высоте hприз, немедленно возрастает сумма всех лобовых сопротивлений, в число которых входят лобовое сопротивление планера ЛА 2 (Хп), лобовое сопротивление тормозного парашюта (Хтп), реверсное сопротивление (ХРр), возникающее в результате направления струи горючего газа в сторону спуска, что приводит к ускоренному торможению ЛА 2 на определенной высоте h до касания земли. Стоит отметить, что включение реверса ГТД 4 сильно ухудшает аэродинамическую устойчивость ЛА 2 из-за нарушения ламинарности набегающего потока. Поэтому важным фактором является время, в которое ЛА способен выдержать вибрацию его планера от начала работы реверса ГТД 4 до посадки. С целью снижения скорости ЛА 2 в момент его соприкосновения с поверхностью посадки до минимально возможной (около 5 метров/секунду), САУ автоматически генерирует сигнал системе управления ГТД 4 о включении обратной тяги ГТД 4 до максимального числа оборотов в последние секунды посадки, способствуя достижению максимального тормозного усилия ЛА 2 на очень малом расстоянии h от поверхности посадки. Определение этой высоты, на которой достигается максимально эффективное торможение от начала запуска реверса ГТД 4, требует проведение расчетов и экспериментов на каждом ЛА, поскольку на данный процесс влияют такие факторы, как вес ЛА 2, аэродинамические характеристики и др.
Во время начала реверсирования соответственно шагу 15 дополнительно выполняется шаг 16, при котором выбрасывается балансирующий парашют 1 из отсека, находящегося на передней части фюзеляжа. Балансирующий парашют 1 используется для создания балансирующего момента Мб (вращающего момента), приводящего носовую часть ЛА 2 в горизонтальное положение, при котором ударная нагрузка распределяется на нижнюю часть ЛА 2 и выпущенные шасси. Для ускорения выброса балансирующего парашюта 1 из отсека можно применить устройства, уже известные в практике, например, мини-ракету. Такой балансирующий парашют служит для продольного управления ЛА 2, так как при некоторых аварийных ситуациях стабилизаторы выходят из строя или становятся неэффективными в результате нарушения ломинарности обтекания потока из-за влияния реверса ГТД 4.
Для предотвращения большого количества жертв вследствие пожара, который может начинать из-за разрушения баков или проводов топлива ЛА, эвакуация проводится сразу по международному регламенту за 90 секунд от момента, когда ЛА 2 полностью остановит свое движение по посадочной поверхности.
Список цитируемой литературы
[1] Нечаев Ю.H., Федеров Р.М. Теория авиационных газотурбинных двигателей. Ч.2. - М.: Машиностроение, 1978. - 336 с.
Изобретение относится к авиационной технике и касается способа управления снижением пассажирского летательного аппарата (ЛА) в аварийной ситуации. Для управления снижением ЛА выбрасывается парашютная система, состоящая из тормозного и балансирующего парашютов. При этом сначала выбрасывается тормозной парашют, размещенный в отсеке на хвостовой части фюзеляжа. Парашютной системой управляет система автоматического управления (САУ), которая дополнительно присоединена к системе управления газотурбинного двигателя (ГТД) и вариометру пилотской кабины. При этом САУ включает реверсный режим работы ГТД для генерации большого тормозного усилия в последние секунды до прикосновения с поверхностью земли. Достигается снижение веса требуемого спасательного оборудования, снижение ударной силы с поверхностью посадки. 2 з.п. ф-лы, 4 ил.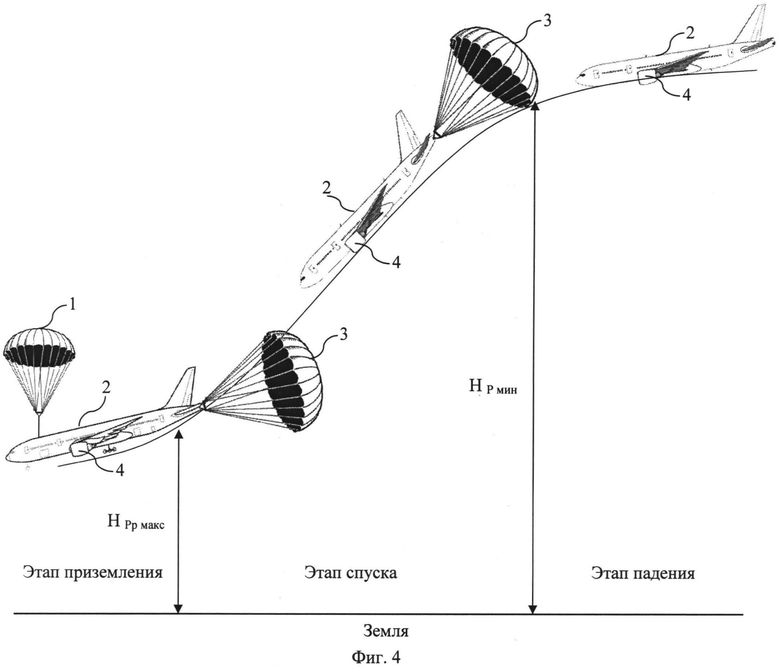
1. Способ управления снижением пассажирского летательного аппарата в аварийной ситуации, включающий в себя выбрасывание парашютной системы, состоящей из тормозного и балансирующего парашютов, где сначала выбрасывается тормозной парашют, размещенный в отсеке на хвостовой части фюзеляжа, причем система автоматического управления (САУ) управляет парашютной системой, которая дополнительно присоединена к системе управления газотурбинного двигателя (ГТД) и вариометру пилотской кабины, отличающийся тем, что при этом САУ включает реверсный режим работы ГТД для генерации большого тормозного усилия в последние секунды до прикосновения с поверхностью земли.
2. Способ по п.1, отличающийся тем, что площадь тормозного парашюта зависит от коэффициента реверсирования ГТД, что способствует уменьшению веса и объема требуемого тормозного парашюта.
3. Способ по п.1, отличающийся тем, что САУ на определенной высоте выбрасывает балансирующий парашют, находящийся в отсеке в передней части фюзеляжа, работающий на создание вращающего момента с целью приведения летательного аппарата в горизонтальное положение, при котором ударные нагрузки распределяются по всему нижнему корпусу и выпущенным шасси для равномерности их поглощения.
| US 4445653 A, 01.05.1984 | |||
| WO 2007096689 A1, 30.08.2007 | |||
| УПРАВЛЯЕМАЯ ПАРАПЛАННАЯ СИСТЕМА | 2008 |
|
RU2378160C1 |

