Область техники
Изобретение относится к авиационной технике, в частности к системам улучшения взлетно-посадочных характеристик (ВПХ) летательного аппарата (ЛА) с помощью вспомогательных платформ, установленных на взлетно-посадочных полосах (ВПП).
Уровень техники
Сокращение разбега самолетов исторически представляет одну из важных задач авиации, так как оно связано с уменьшением площадей аэропортов, экономией топлива и увеличением дальности полетов. Платформы и способы для реализации сокращенного разбега имеют особое значение, как для военных, так и гражданских летательных аппаратов (ЛА). К примеру, согласно перспективной концепции компании «Аэробус» для выполнения будущего экологического и экономичного взлета [1] предложена наземная установка с колесами для разгона пассажирского самолета до отрыва. При разбеге газотурбинные двигатели (ГТД) пассажирского самолета работают в режиме набора высоты, что реализует экономию топлива, уменьшение шума и укорочение расстояния и времени взлета.
В дополнение к этому, существует метод перенаправления выхлопных реактивных струй, который преимущественно применяют для палубных ЛА. Известен ряд патентов, предлагающих схемы газоотбойников реактивных струй для исключения потенциального вреда на объекты, находящие на их пути. К примеру, в патенте US 3080937 А, опубл. 12.03.1963 ,предлагается применять газоотбойник, служащий для уменьшения шума, произведенного ГТД ЛА. Это осуществляется путем перенаправления выхлопных струй вверх с помощью ряда флюгеров, установленных последовательно внутри газоотбойника по определенной схеме с целью достижения вертикального перенаправления.
Кроме того, в патенте US 4173323 А, опубл. 06.11.1979, представлено устройство, осуществляющее функцию сокращения разбега снабжением конца ВПП палубы рампой с продольным изгибом вверх, что способствует реализации короткого взлета. При разбеге ЛА рампа придает большой угол атаки, что увеличивает подъемную силу, одновременно сокращает время и расстояние до отрыва. В дополнение, эти ВПП содержат по краям вспомогательную рампу, служащую для подачи определенного момента тангажа при взлете. Для повышения функциональности описанных ВПП в патенте US 4267991 А, опубл. 19.05.1981, предлагалось использовать складываемые мобильные ВПП для самолетов категории Харриер и подобных самолетов с трехколесными шасси. Перевозка этих мобильных ВПП осуществляется специальным грузовиком.
Известен также другой способ короткого взлета в конструкции патента US 7594624 В2, опубл. 29.09.2009, согласно которому ЛА должен базироваться на раздвижной наклонной платформе, обеспечивающей ему первоначальный угол атаки. Эта платформа ускоряется с точки старта с помощью направляющего устройства (рельса) и специального катапультирующего привода до определенного расстояния, где при максимальном режиме (взлетном) запускается силовая установка ЛА.
Известным недостатком вышеизложенных технических решений является то, что большая кинетическая энергия выхлопных реактивных струй не используется для реализации какой-либо полезной работы, как создание воздушной подушки под ЛА для улучшения его ВПХ.
Сокращению разбега наземной установкой уделялось больше внимания в заявке на изобретение US 20140203136 А1, опубл. 24.07.2014, где пассажирский самолет с убранными шасси размещается на санях, разгоняемых на электромагнитных рельсах до скорости отрыва самолета с помощью наземной электростанции. Под самолетом базируется установка, которая поднимает самолет с его центра масс с помощью электромагнитной подушки и балансирует его при разбеге.
Следовательно, ранее рассмотренный недостаток присущ и последнему техническому решению.
Наиболее близким по конструктивной сущности к заявляемому изобретению является способ, изложенный в патенте РФ 2562675, опубл. 10.09.2015, который заключается в укорочении взлета за счет создания воздушной подушки, увеличивающей подъемную силу ЛА при разбеге, преимущественно перенаправлением собственных реактивных струй газоотбойником к нижней поверхности крыльев и фюзеляжа. Улавливаемые газоотбойником струи проходят через подземную трубу с расширяющимся диаметром относительно ее длины и перенаправляются с помощью специальной сетки, расположенной по поверхности ВПП.
Известный недостаток такого технического подхода заключается в ослаблении поверхности аэродромов, куда приземляются с большой частотой сверхтяжелые самолеты, наносящие огромные динамические нагрузки на бетон покрытия. Создание сеток и полостей для перенаправления реактивных струй под поверхностью аэродрома усложняет постройку, обслуживание и инфраструктуру не только этих аэродромов, но аэропортов в целом.
Раскрытие изобретения
Задачей данного изобретения является обеспечение оптимального использования кинетической энергии реактивных струй самолетов.
Достигаемый данным изобретением технический результат заключается в уменьшении расстояния разбега и экономии топлива самолета малой тяговооруженности при взлете.
Технический результат достигается тем, что авиационный пусковой комплекс для перенаправления реактивных струй содержит полые каналы, соединяющие заборники улавливания выхлопных струй, размещенные за газотурбинными двигателями самолета, с камерой сетки перенаправления уловленных струй на нижнюю площадь крыла с целью создания воздушной подушки, способствующей повышению подъемной силы самолета при разбеге, тем самым реализации сокращенного взлета. Авиационный пусковой комплекс выполнен в виде мобильного аппарата, прикрепляемого съемным крепежом к челноку, скользящему по направляющей, наряду с боковой колесной парой по двум соответствующим рельсам вдоль аэродрома до отрыва самолета. Движение авиационного пускового комплекса осуществляется электромагнитной тягой, создаваемой с помощью электромагнитных катушек, расположенных по средней плоскости направляющей, причем электромагнитные катушки соединены с источником мощного тока с чередованием магнитных полюсов, образуя статор линейного электродвигателя, а электромагнитные катушки челнока соединены с источником тока через коллектор с возможностью смены магнитных полюсов в зависимости от заданного ускорения челнока, соответствующего закону ускорения самолета при разбеге, образуя ротор линейного электродвигателя.
Краткое описание чертежей
Реализация данного изобретения далее излагается со ссылкой на прилагаемые чертежи, на которых:
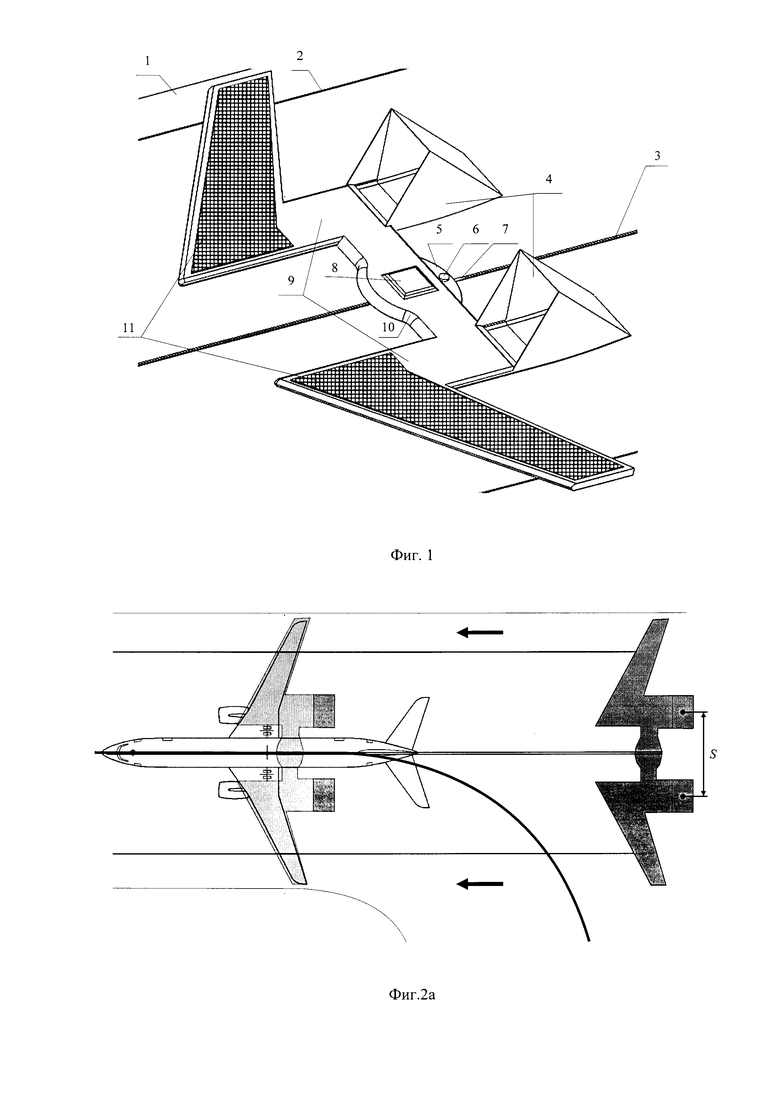
фиг. 1 - изображен передний вид авиационного комплекса перенаправления реактивных струй;
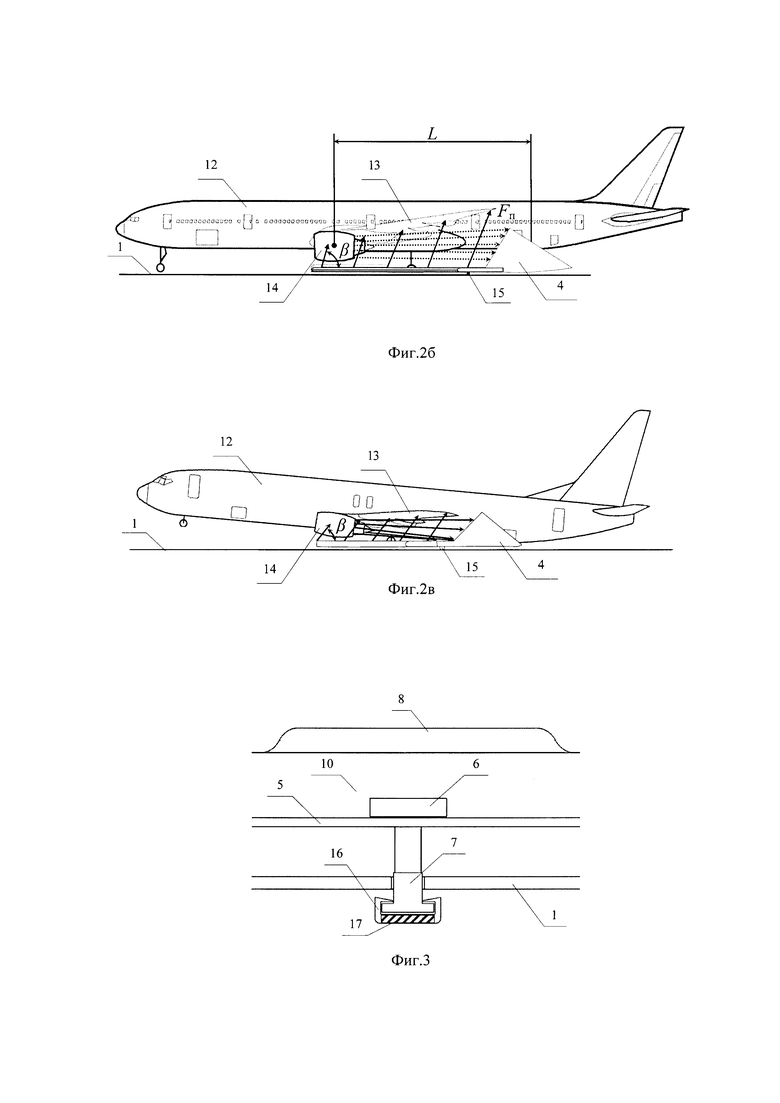
фиг. 2а - показан процесс установления авиационного комплекса перенаправления под самолетом на точке старта разбега;
фиг. 2б - показан поперечный вид конфигурации самолета с авиационным комплексом во время перенаправления реактивных струй;
фиг. 2в - показан поперечный вид конфигурации самолета с авиационным комплексом при перенаправлении реактивных струй в момент отрыва;
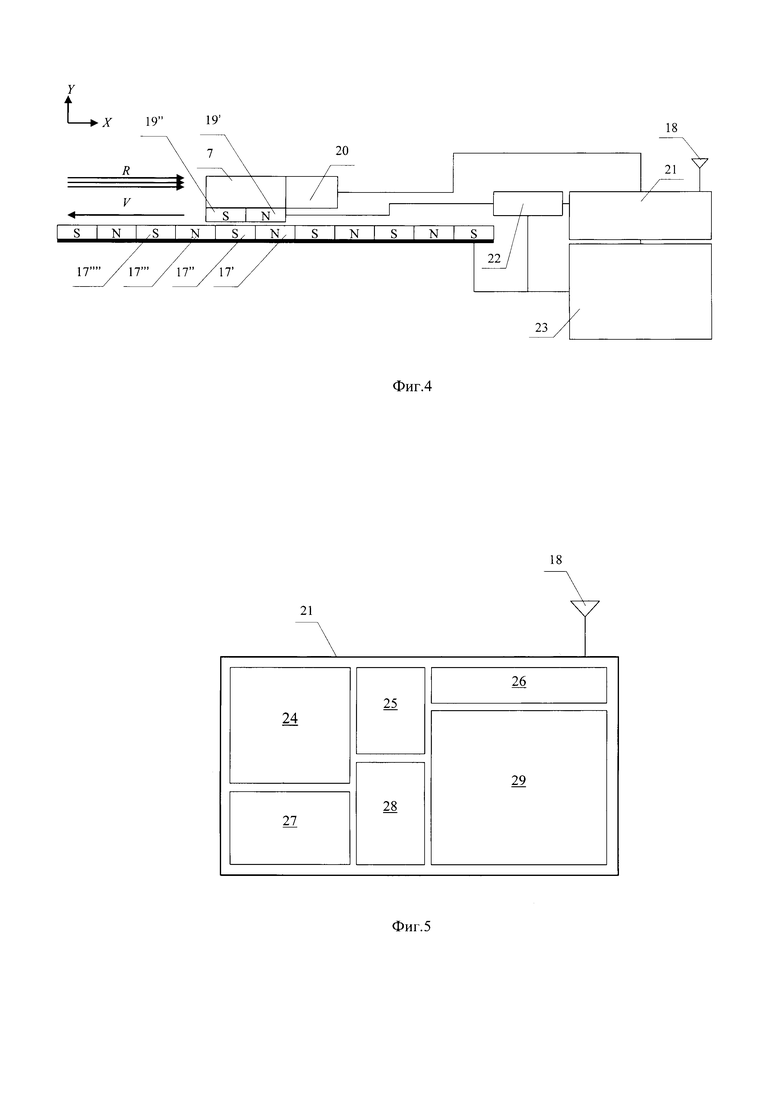
фиг. 3 - схематично изображено крепление авиационного комплекса перенаправления к челноку направляющей;
фиг. 4 - схематично показана инфраструктура системы электромагнитной тяги для авиационного комплекса перенаправления;
фиг. 5 - схематично изображены основные компоненты блока диагностики и контроля;
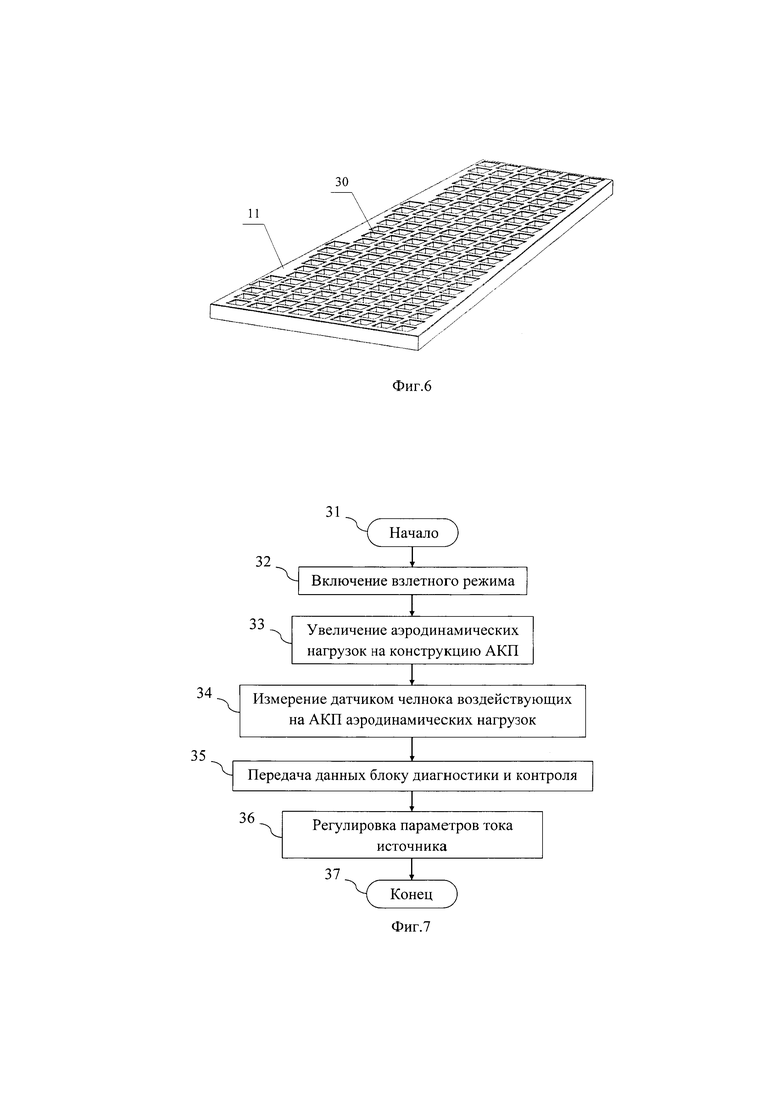
фиг. 6 - изображена сетка перенаправления реактивных струй;
фиг. 7 - представлены процессы удерживания заданной точки базирования авиационного комплекса перенаправления при воздействии внешних аэродинамических нагрузок на его конструкцию;
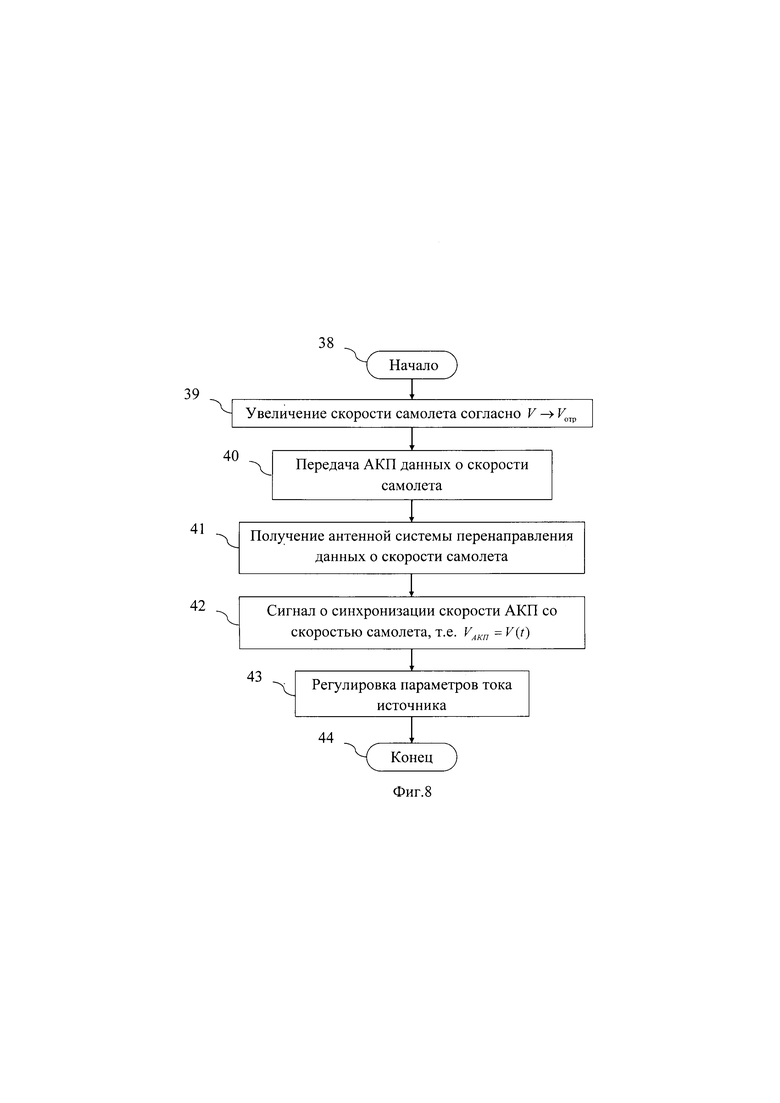
фиг. 8 - представлены процессы следования авиационного комплекса перенаправления за самолетом при разбеге.
Предлагаемая система запуска самолета малой тяговооруженности 12 содержит авиационный комплекс перенаправления (АКП) реактивных струй 10, подключенный к инфраструктурным оборудованиям, состоящим из источника мощного тока 23, блока диагностики и контроля 21 и коллектора 22, который служит для автоматического переключения направления тока. АКП 10 предназначен для создания воздушной подушки из перенаправленных реактивных струй под самолетом 12, например пассажирским, что способствует устранению силы трения шасси с поверхностью аэродрома 1 и соответственно сокращению расстояния и времени разбега.
Система работает следующим образом:
На фиг. 2а показано, что самолет 12 сначала рулит по аэродрому 1 вдоль желтой линии, где размещена направляющая 3 до точки старта разбега. Затем к самолету 12 подводится АКП 10 с места его парковки на аэродроме 1. Далее, как видно на фиг. 1 и фиг. 3, на точке старта разбега прикрепляют хвост АКП 5 к челноку 7 с помощью съемного крепежа 6. Эти процессы могут быть выполнены аэродромным оператором или автоматически специальной машиной. При перемещении АКП 10 электромагнитной тягой к точке старта челнок 7 скользит по направляющей 3 и колесная пара 15 по рельсам 2, чем сохраняется прямолинейная ориентация. Устойчивое продольное движение еще поддерживается с помощью ряда боковых подшипников (не показано), установленных в стенках рельса направляющей 16. Челнок 7 дополнительно может содержать более одного отверстия крепления для повышения удобства при эксплуатации.
Горизонтальное расстояние между заборниками 4, обозначаемое буквой S на фиг. 2а, зависит от расстояния между основными шасси самолета 12 и расстояния между бортовыми ГТД 14 (близкими к фюзеляжу). Количество заборников 4 должно соответствовать количеству ГТД 14. При этом оптимальную площадь среза заборников 4 определяет расстояние между ними и срезом сопла ГТД 14, обозначаемое буквой L на фиг. 2б. Чем дальше L, тем больше потребная площадь улавливания реактивных струй и тем ниже становится их температура. В связи с этим увеличивается длина каналов перенаправления реактивных струй 9, которые могут иметь расширяющуюся полость, что служит некоторому снижению температуры проходящих внутри струй.
После крепления АКП 10 к челноку 7 под самолетом 12, как показано на фиг. 2б, последний набирает максимальные обороты ГТД 14 при взлетном режиме. Выхлопные реактивные струи улавливаются заборниками 4, характеризующимися оптимальной формой отражения реактивных струй на каналы 9, что иллюстрируется на фиг. 2б и фиг. 2в. Далее струи, проходя через каналы 9, равномерно распределяются в полости камеры перенаправления под сетками перенаправления 11, обладающими маленькими отверстиями 30, как изображено на фиг. 6, которые позволяют выходу перенаправленных реактивных струй через них и концентрируют их на всей нижней площади крыла 13 (см. фиг. 2б). В результате такого процесса создается воздушная подушка с подъемной (перенаправленной) силой Fп, суммируемой с подъемной силой самолета 12 и позволяющей ему отрываться от поверхности аэродрома 1 на малую высоту, устраняя при этом трение с экраном. Эта высота задается так, чтобы гарантировать безопасный контакт шасси с экраном 1 в случае внезапного прерывания или ослабления Fп.
Включение взлетного режима ГТД 14 приводит к приложению больших аэродинамических нагрузок на прочную конструкцию заборников 4 и АКП 10 в целом. Их нужно преодолеть для стабилизации АКП 10 на заданной точке крепления под самолетом 12. Это реализуется электромагнитной тягой, представленной на фиг. 4, которая преодолевает вышеописанные нагрузки, удерживая АКП 10 на точке крепления, и обеспечивает устойчивое следование за самолетом 12 при его ускоренном разбеге. Для этого электромагнитные катушки 17 подключаются к источнику 23 так, что их магнитные полюса чередуются, образуя статор линейного электродвигателя. При этом электромагнитные катушки челнока 19 подключаются к источнику тока 23 через коллектор 22 так, что меняют свои полюса при скольжении челнока 7 по направляющей 3, образуя ротор линейного электродвигателя. Их взаимодействие можно описать следующим образом: катушка 19' отталкивается от катушки 17' и притягивается к катушке 17'', катушка 19'' отталкивается от катушки 17'' и притягивается к катушке 17''', причем катушки 19' и 19'' после перемещения челнока 7 на определенное расстояние меняют направление полюсов с минуса на плюс через коллектор 22, подключенный к источнику тока 23. Тогда катушка 19' будет отталкиваться от катушки 17'' и притягиваться к катушке 17''', а катушка 19'' будет отталкиваться от катушки 17''' и притягиваться к катушке 17''''. Изменение полюсов катушек 19' и 19'' осуществляется по заданной коллектору 22 блоком диагностики и контроля 21 функции, соответствующей ускорению самолета 12 при разбеге.
Как известно, если выхлопные струи воздействуют на заборники 4 с силой, теоретически равной тяге R (практически она меньше из-за затухания при распространении струй), которая меньше электромагнитных сил, то в результате АКП 10 будет перемещен назад. Исходя из этого, используется датчик продольных нагрузок 20 (см. фиг. 4), действующих по оси X на АКП 10, где он (датчик 20) измеряет все приложенные к конструкции АКП 10 аэродинамические силы, и далее передает соответствующие данные блоку диагностики и контроля 21 согласно шагу 35. Данный датчик 20 прикрепляется к челноку 7 противоположно направлению вектора R по X, как показано на фиг. 4. На фиг. 7 описывается процесс стабилизации АКП 10 на заданной точке старта разбега. После запуска режима максимальных оборотов ГТД 14 при шагах 31-33 стабилизация АКП 10 удается за счет использования электромагнитных сил, равных приложенным к АКП 10 усилиям согласно данным, полученным на шаге 34 путем постоянной регулировки параметров (интенсивность и частота) тока источника 23 сигналами управляющего блока 21, где в конце реализуется искомая стабилизация, шаги 36, 37.
Измерительные данные передаются блоку диагностики и контроля 21 с помощью шнура. К тому же данные из удаленного центра управления в аэропорту (не показан) передаются с помощью антенны 18, связанной с приемопередатчиком 26, соединенным с вычислительным модулем 29. Согласно фиг. 5 блок диагностики и контроля 21 дополнительно содержит запоминающее устройство 24 и блок управления питанием 27 наряду с портами коллектора 25 и датчика аэродинамических нагрузок 28. Кроме того, в куполе 8 АКП 10 могут быть установлены измерительные устройства, такие как датчики температуры и давления уловленных реактивных струй с целью контроля этих параметров.
Возвращаясь к фиг. 2б, видим, что после запуска взлетного режима ГТД 14 создается воздушная подушка, отрывающая самолет 12 на предопределенную высоту от экрана (аэродрома 1), при этом самолет 12 ускоряется до скорости отрыва. Следование АКП 10 за самолетом 12 осуществляется синхронизацией скорости челнока 7 со скоростью самолета 12 при разбеге. Для этого необходимо ускоренно повышать значение электромагнитных сил, чтобы не только преодолевать воздействие возрастающих внешних аэродинамических сил на АКП 10, но и сохранять заданное расстояние L от ГТД 15 (см. фиг. 2б) за весь разбег. На фиг. 8 описано осуществление процесса следования АКП 10 за самолетом 12, где при увеличении его скорости V передаются соответствующие данные блоку диагностики и контроля 21 через антенну 18, шаги 38-41. Далее блок 21 управляет параметрами тока источника 23 вышеописанным образом так, чтобы производить электромагнитную тягу, достаточную для синхронизации скорости АКП 10 со скоростью самолета 12, т.е. VАКП=V(t), шаги 42-44.
В другом варианте изобретения АКП 10 может быть прикреплен к стойкам основных шасси самолета 12 специальным соединением на точке старта разбега так, чтобы самолет 12 разгонялся до отрыва за счет электромагнитной тяги, при этом ГТД 14 работают в режиме набора высоты. Соответственно, в момент отрыва соединение АКП 10 с самолетом 12 автоматически развязывается. В таком варианте облегчаются процессы следования за самолетом 12.
Таким образом, создание воздушной подушки продолжается до отрыва самолета 12. При подъеме носа самолета 12 под конец разбега отметим два момента: 1) поток реактивных струй наклоняется; 2) расстояние между передней кромкой крыла 13 и сеткой перенаправления 11 увеличивается. Для первого момента непрерывное попадание реактивных струй в заборники 4 можно обеспечить, например, наклоном входов в заборники 4, как показано на фиг. 2б. Для второго момента требуется повышать скорость перенаправленных струй на площадь крыла 13, например, за счет управления расстоянием L с помощью каналов 9 с изменяемой длиной. Кроме того, чтобы избежать создания турбулентной зоны перед крыльями 13, угол вектора перенаправленных струй β на фиг. 2б автоматически уменьшают.
Технические требования к реализации вышеописанных решений уже обеспечены настоящим уровнем авиационной и цифровой техники, кроме того, передовые вычислители могут эффективно поддерживать быстроту выполнения автоматизированных процессов следования за самолетом 12 АКП 10.
Источники информации
[1] Eco-climb // Airbus. http://www.airbus.com/innovation/future-by-airbus/smarter-skies/aircraft-take-off-in-continuous-eco-climb/
Изобретение относится к авиационной технике, в частности к системам улучшения взлетно-посадочных характеристик летательного аппарата с помощью специальных платформ, установленных на взлетно-посадочных полосах. Авиационный пусковой комплекс содержит полые каналы, соединяющие заборники (4) улавливания выхлопных струй с камерой сетки перенаправления струй (11) на нижнюю площадь крыла с целью создания воздушной подушки, способствующей повышению подъемной силы самолета при разбеге. Комплекс выполнен в виде мобильного аппарата, прикрепляемого к челноку (7), скользящему по направляющей (3) по двум соответствующим рельсам (2). Движение комплекса осуществляется электромагнитной тягой, создаваемой с помощью электромагнитных катушек. Катушки соединены с источником тока с чередованием магнитных полюсов, образуя статор линейного электродвигателя. Электромагнитные катушки челнока соединены с источником тока через коллектор с возможностью смены магнитных полюсов в зависимости от заданного ускорения челнока, образуя ротор линейного электродвигателя. Достигается уменьшение расстояния разбега и экономии топлива самолета малой тяговооруженности при взлете. 10 ил.
Авиационный пусковой комплекс для перенаправления реактивных струй, содержащий полые каналы, соединяющие заборники улавливания выхлопных струй, размещенные за газотурбинными двигателями самолета, с камерой сетки перенаправления уловленных струй на нижнюю площадь крыла с целью создания воздушной подушки, способствующей повышению подъемной силы самолета при разбеге, тем самым реализации сокращенного взлета, отличающийся тем, что он выполнен в виде мобильного аппарата, прикрепляемого съемным крепежом к челноку, скользящему по направляющей, наряду с боковой колесной парой по двум соответствующим рельсам вдоль аэродрома до отрыва самолета, при этом движение пускового комплекса осуществляется электромагнитной тягой, создаваемой с помощью электромагнитных катушек, расположенных по средней плоскости направляющей, причем электромагнитные катушки соединены с источником мощного тока с чередованием магнитных полюсов, образуя статор линейного электродвигателя, а электромагнитные катушки челнока соединены с источником тока через коллектор с возможностью смены магнитных полюсов в зависимости от заданного ускорения челнока, соответствующего закону ускорения самолета при разбеге, образуя ротор линейного электродвигателя.
| СПОСОБ СОЗДАНИЯ ВОЗДУШНОЙ ПОДУШКИ ПЕРЕНАПРАВЛЕНИЕМ РЕАКТИВНОЙ СТРУИ ДЛЯ ОСУЩЕСТВЛЕНИЯ КОРОТКОГО ВЗЛЕТА | 2014 |
|
RU2562675C1 |
| Устройство для изготовления напряженно-армированных железобетонных изделий на стендах | 1957 |
|
SU114030A1 |
| УСКОРИТЕЛЬ ДЛЯ ЗАПУСКА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2027642C1 |
| US 2008087764 A1, 17.04.2008. | |||

