Изобретение относится к средствам доставки груза в труднодоступные районы, в частности к управляемым парапланным системам, которые могут применяться для различных целей: для доставки грузов в труднодоступные районы, районы стихийных бедствий, для диагностики и разведки различных районов, для экологического мониторинга загрязненных районов земной поверхности и т.д.
С увеличением количества экологических катастроф, таких как Чернобыльская авария, загрязнение лесов и полей, тундры и тайги, отходами военной деятельности и нефтью встает задача точной диагностики и разведки различных районов земной поверхности без участия человека из-за труднодоступности и/или вредных воздействий.
Известны средства для доставки измерительной и диагностической аппаратуры с помощью вертолетов, недостатком которых является возможность попадания человека в опасные условия (радиоактивные излучения и т.п.). Известны средства для доставки аппаратуры с помощью зондов и ракет, недостатком таких систем является необходимость наличия телеметрического или возвращаемого блоков, что в условиях труднодоступных районов затруднительно сделать.
Известны средства доставки аппаратуры с помощью управляемой парашютной системы. Недостатком таких систем является необходимость наличия носителя (самолета, вертолета) для доставки парашютной системы в заданный район земной поверхности.
В настоящее время за рубежом разработано большое количество подвижных воздушных средств. Например, управляемая система доставки по воздуху парашюта - крыла GPADS-1. Система использует парашют скоростного напора для доставки грузов 700-1500 фунтов (286-614 кг). Автоматическая навигационная система, использующая глобальную систему определения местоположения «Navstar», позволяет уточнить влияние ветровых возмущений и достичь погрешности приземления 100 м.
Следует отметить, что появились сообщения об использовании парашютной системы с двигателем, который позволяет поднять систему на большую высоту при ее потере во время планирования системы. В этом случае такая система может находиться в воздухе достаточно долгое время.
В таблице приведены характеристики некоторых систем доставки.
В Италии выпускают аппараты FIB (Flying Inflatable Boat - летающая надувная лодка), у нас данные аппараты известны как "флайбот" - гибрид моторной лодки и дельтаплана, "Флайбот" оснащен двухтактным мотором и крылом дельтаплана. При стандартных настройках карбюратора аппарат может взлететь на высоту до трех километров. Лодка выпускается компанией Lomas Nautica, при ее изготовлении используется специальный утонченный пластик. Мотор двухтактный, двигатель фирмы Rotax. Мотор предлагается в двух модификациях - с воздушным охлаждением (52 л.с.) и с жидкостным охлаждением (62 л.с), чем мощнее двигатель, тем с большим количеством лопастей можно установить пропеллер и тем тише будет работать аппарат.
Эти задачи можно решить с помощью управляемой парапланной системы, которая является самостоятельным летательным аппаратом.
Известна планирующая парашютная система для транспортировки полезной нагрузки (патент США №4865274, кл. B64D 17/34, заявл. 29.04.88), которая содержит парашют в виде крыла, блок управления стропами парашюта для изменения состояния крыла и траектории полета. Данная конструкция не обеспечивает точной доставки грузов и требуется носитель (самолет, вертолет) для доставки платформы.
Известна управляемая парашютная система, включающая планирующую оболочку с блоком полезной нагрузки, командным блоком, блоком управления стропами, систему фиксации и определения координат (патент России №2111898, МПК7 B64D 17/34, от 27.05.1998 г.).
Система может применяться в различных погодных условиях и в различное время суток, многократно. Система содержит планирующий парашют с грузовой платформой, блок обнаружения маяка, командный блок, блок управления стропами парашюта, инерциальную навигационную систему, блок формирования управляющих сигналов на включение/выключение и задание начальных условий для инерциальной навигационной системы и блок диагностики района поверхности Земли.
Однако эта конструкция, как и другие известные системы, не позволяет решить задачи автономной разведки и диагностики без использования носителя, т.к. парашют, как более жесткое крыло, не позволяет получить высокое аэродинамическое качество и не имеет двигательной установки для создания подъемный силы.
Задача, на решение которой направлено изобретение, состоит в создании на основе применения беспилотного летательного аппарата комплекса для автономной разведки и диагностики поверхности земной поверхности без использования носителя (самолета, вертолета и.п.), для доставки грузов различной природы (медицинских, военных, гуманитарных, транспортных и т.п.).
Технический результат - обеспечение автономности системы и повышение точности приземления груза. Поставленная задача решается, а технический результат достигается тем, что в управляемой парапланной системе, включающей планирующую оболочку с блоком полезной нагрузки, командным блоком, блоком управления стропами, систему фиксации и определения координат, согласно изобретению планирующая оболочка представляет собой параплан, в качестве системы фиксации и определения координат она содержит навигационную систему и дополнительно содержит магнитометр, высотомер или вариометр и космическую навигационную систему, при этом навигационная система, магнитометр, высотомер и космическая навигационная система последовательно соединены так, что их выходы соединены со входами командного блока, а выход командного блока соединен со входами блока управления стропами, маршевого двигателя и блока полезной нагрузки и концентратора локальной сети, который связан с входами и выходами блока дистанционного управления и антенной сети.
Выполнение планирующей оболочки в виде параплана (гибкого крыла) в сочетании с маршевым двигателем позволило создать вместо спускаемой парашютной системы - летательный аппарат. Управление осуществляется в двух плоскостях. Использование параплана позволяет увеличить аэродинамическое качество аппарата с 3-4 до 9, что позволяет обеспечить автоматическое управление им в двух плоскостях. Применение парапланной системы с возвратом в заданную точку земной поверхности позволяет достичь точности приземления груза в пределах 10-50 м в зависимости от условий применения, уменьшить риск воздействия вредных воздействий на человеческий организм, а также применять систему при погодных условиях: ветер не более 15 м/с, отсутствие дождя и вихревых потоков воздуха, многократно и при малых затратах.
Наведение на маяк в данном случае может использоваться в качестве аварийного метода посадки при нештатных ситуациях.
Предлагаемое изобретение поясняется чертежами, где
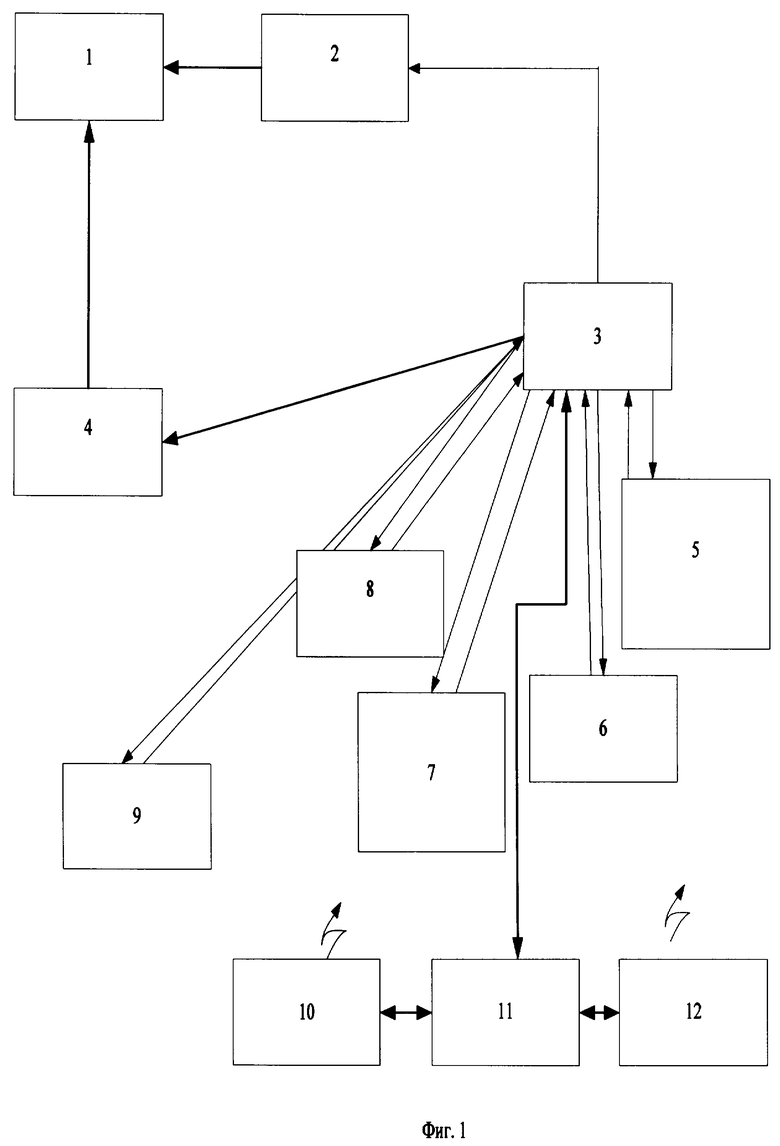
- на фиг.1 представлена структурная схема системы;
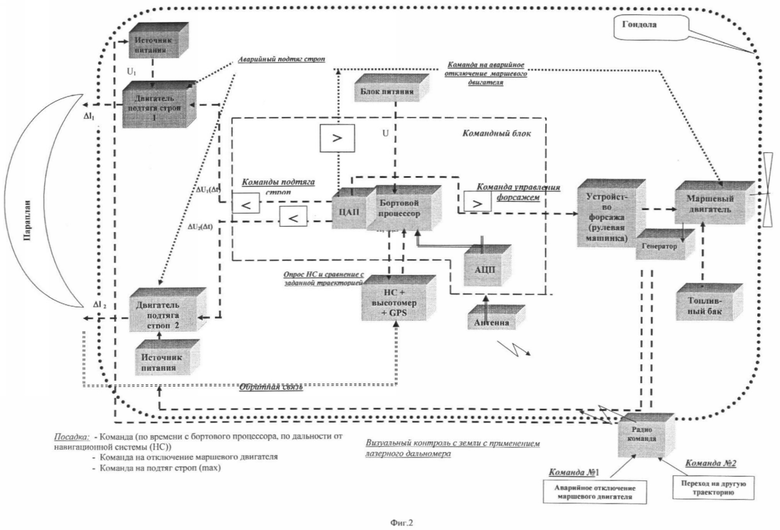
- на фиг.2 - структурная схема командного блока;
- на фиг.3 - структурная схема блока управления стропами параплана;
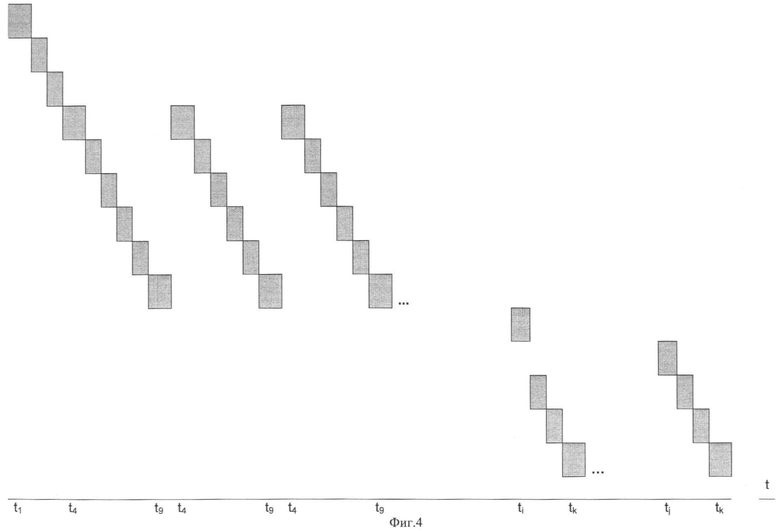
- на фиг.4 - циклограмма работы бортового процессора ЛА;
- на фиг.5 - коррекция реальной траектории ЛА;
- на фиг.6 - движение ЛА без ветрового возмущения, при затягивании сначала левой, а потом правой стропы на 50 см, расчет по управлениям движения ЛА.
Управляемая парапланная система представлена на фиг.1, где
1 - параплан (гибкое крыло);
2 - маршевый двигатель с тележкой;
3 - командный блок (бортовой процессор с кабелями связи между датчиками системы и источником питания, цифроаналоговый (ЦАП) и аналогово-цифровой (АЦП) преобразователи или шина I2C);
4 - блок управления стропами, включающий микропроцессор;
5 - навигационная система (инерциальная, бесплатформенная и т.п.);
6 - высотомер или вариометр;
7 - космическая навигационная система на базе GPS-приемника для получения информации от космической навигационной системы Глонасс/GPS;
8 - магнитометр;
9 - блок полезной нагрузки (видео-, фотодатчики, грузы, медикаменты и т.п.);
10 - блок дистанционного управления полетом ЛА (джойстик);
11 - концентратор локальной сети на борту ЛА;
12 - антенна сети Ethernet, для передачи информации на пункт обработки информации и приема команд ручного управления аппаратом.
Управляемая парапланная система (ПС) (фиг.1) для доставки грузов, мониторинга заданного участка земной поверхности включает планирующую оболочку - параплан 1 с тележкой с маршевым двигателем 2, последовательно соединенные командный блок 3, блок управления стропами 4, навигационную инерциальную систему 5, высотомер 6, космическую навигационную систему GPS 7, магнитометр 8 и блок полезной нагрузки 9, при этом выходы высотомера 6, навигационной системы (НС) 5, магнитометра 8 и космической навигационной системы GPS 7, концентратора локальной сети 11 соединены с входами бортового процессора 3, выход бортового процессора 3 соединен с входами блока управления стропами 4, маршевого двигателя 2, блока полезной нагрузки 9 и концентратора локальной сети 11, который связан с входами и выходами блока дистанционного управления 10 и антенной сети Ethernet 12.
Командный блок 3 (фиг.1) представляет собой бортовой процессор с кабелями связи между датчиками системы и источником питания, цифроаналоговый (ЦАП) и аналогово-цифровой (АЦП) преобразователи или шина I2C, исполнительными органами которого являются блок управления стропами 4, рулевые машинки (производство фирмы HITEC и т.п.) для управления собственно маршевым двигателем 2.
На фиг.2 приведена блок-схема реализации ПС в виде летательного аппарата (ЛА).
На фиг.3 приведен комплекс для мониторинга земной поверхности, включающий в себя автомобиль УАЗ; ЛА; палатку с обогревателем; ЗИП; мобильный пункт управления, включающий в себя 2 ноутбука, источники питания, прибор GARMIN, лазерный дальномер, переговорное устройство, документацию (паспорта, инструкции и т.п.); трап; цепи и лебедку для аварийной ситуации с автомобилем; генератор.
После прибытия автомобиля УАЗ в место применения управляемая парапланная система развертывается следующим образом. Устанавливается палатка с мобильным пунктом управления полетом ЛА, включающим ноутбуки для управления полетом и отображения видеоинформации, передаваемой с помощью сети Ethernet 12, прибор GARMIN для предстартового определения начальных координат ЛА, лазерный дальномер для контроля высоты полета ЛА, переговорное устройство для 5 человек, обеспечивающих функционирование комплекса, документацию - инструкции для работы с ЛА и пунктом, приборами и обеспечивающим оборудованием (генератором, источниками питания и т.п.). Управляемая парапланная система выгружается из автомобиля по трем специальным трапам.
После предстартовой проверки оборудования, установленного на ЛА, и вывода крыла параплана 1 в вертикальное положение с мобильного пункта управления дается команда на старт (включение форсажа маршевого двигателя 2). Полет ЛА может осуществляться по маршрутам, записанным в памяти бортового процессора 3, по электронной карте, с помощью пульта ручного управления 10 (джойстика). В случае появления аварийной ситуации с помощью блока 10 осуществляется аварийная посадка ЛА.
В системе применяется серийный параплан, серийная навигационная система, высотомер или вариометр, магнитометр, космическая система Глонасс/GPS.
В зависимости от требуемой дальности полета и массы полезной нагрузки в качестве параплана 1 может быть выбран серийный параплан, например «Зорро» или «Джаз», выпускаемый в России компанией «Параавис». Маршевый двигатель 2 входит в комплект поставки параплана, выбор типа двигателя определяется в зависимости от поставленных задач.
Высотомер 6 представляет собой любой барометрический высотомер или вариометр, удовлетворяющий требованиям по точности и диапазону измеряемой высоты. Приборы технически эквивалентны с точки зрения достижения технического результата.
Магнитометр 8 - прибор, например фирмы «Honeywell» (США).
Космическая система Глонасс/GPS 7 строится на основе приборов типа GPS-приемников, GARMIN или иных датчиков, работающих с космической навигационной системой. Выбор таких приборов на рынке достаточно широк.
В качестве бортового процессора 3 можно использовать любой бортовой процессор, позволяющий установить сокращенную версию Windows ХР и выше и обеспечивающий расположение управляющей программы, драйверов, программного обеспечения для видеосъемки, передачи информации на землю и т.п.
Двигатели подтяга строп, входящие в блок управления стропами 4, выбираются в зависимости от нагрузок на стропы, массы полезной нагрузки, общей массы системы, условий эксплуатации. Выбор двигателей весьма широк и не представляет трудностей.
Режимы работы программы управления, записанной в бортовом процессоре 3: нормальный, аварийный, режим планирования (отключение маршевого двигателя), режим посадки, режим съема информации с датчиков (видеокамеры, ИК-датчика, и т.п.), режим передачи информации на наземный пункт приема информации.
Циклограмма функционирования аппарата включает следующие циклограммы (фиг.4).
А Единая циклограмма функционирования изделия
В Циклограмма функционирования изделия при аварийной посадке
С Циклограмма функционирования изделия при штатной посадке
Из циклограммы видно, что после вывода на заданную высоту полета проводится постоянный опрос навигационной системы 5, сравнение полученных координат X, Z с номинальной траекторией, записанной в бортовом процессоре 3, определяются отклонения координат и по ним рассчитываются команды на подтяг строп с помощью исполнительных органов 4. Далее проводится опрос высотомера 6 и по алгоритму управления 3 определяется необходимость подачи команды на форсаж двигателя 2 для подъема аппарата 1 на требуемую высоту полета.
Если по показателям лазерного дальномера (фиг.3) видно критическое отклонение аппарата от заданного режима, с земли с помощью радиокоманды 10 подается сигнал на отключение маршевого двигателя 2 и максимальный подтяг левой и правой строп параплана 4.
Последовательность работы ЛА
Последовательность работы ЛА включает в себя следующие этапы: предстартовая выставка датчиков, старт ЛА, выход на заданную траекторию полета, управляемый полет, посадка.
Предстартовая выставка датчиков
После выставки датчиков включаются все источники питания, бортовой процессор 3, маршевый двигатель 2.
Старт ЛА
В случае если конкретная высота вывода ЛА не задана, время от момента старта до момента стабилизации лежит в диапазоне 6-14 с. Расстояние от точки старта по направлению полета 400-600 м.
Выход на заданную траекторию полета
Выход на заданную траекторию контролируется по данным лазерного дальномера (фиг.3) с целью включения аварийного спуска аппарата.
Управляемый полет
Управляемый полет осуществляется либо по командам от бортового процессора 3, либо по радиокомандам 10. Постоянно осуществляется контроль движения визуально с помощью лазерного дальномера и видеокамеры (фиг.3). Одновременно в бортовом процессоре записывается телеметрическая информация для последующего анализа.
Посадка
Планирование ЛА на конечном участке наведения осуществляется в вертикальной плоскости, проходящей через наблюдателя и совпадающей с направлением действия ветра.
Алгоритм управления
Особенность управления данным аппаратом состоит в том, что управление развязано по двум плоскостям и не коррелированно между собой. При отклонении высоты полета аппарата в ту или иную сторону от заданной высоты команда управления представляет собой команду на форсаж маршевого двигателя 2.
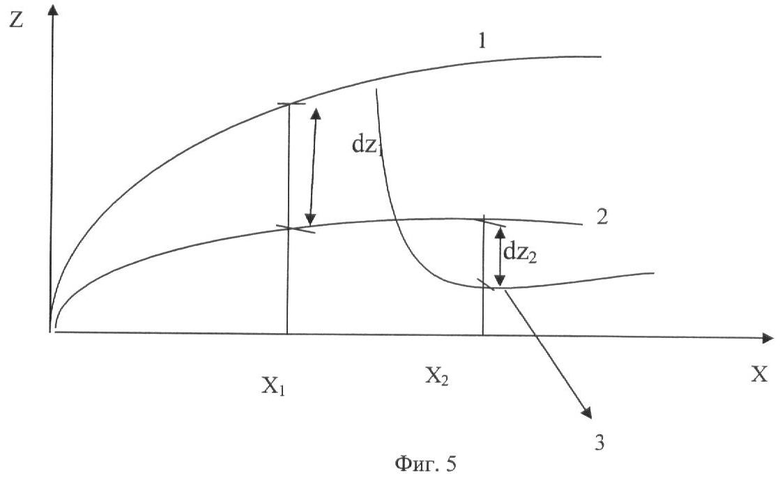
При отклонении траектории полета аппарата в плоскости XOZ по полученным отклонениям рассчитываются величины подтяга длины стропы (левой, правой, обеих). Проводится коррекция по оси OZ, т.к. ось ОХ выбрана как основная при движении аппарата.
В качестве параметра рассогласования принято линейное отклонение аппарата от кинематической траектории: h2=Zn-Zt, где Zn - номинальная координата, Zt - реальная координата.
1. При изменении высоты Н: dH=Hnom-Htek>0 - идет снижение ЛА; при dH=Hnom-Htek<0 - идет подъем ЛА. При изменении высоты ЛА необходимо вырабатывать команду:
- при снижении ЛА на 100 м и более проводится расчет времени форсажа маршевого двигателя 2;
- при подъеме ЛА на 300 м и более проводится расчет длины подтяга строп для снижения (фиг.5).
2. Если в полетном задании задано не строгое соответствие траектории, а съем информации в заданном диапазоне земной поверхности, траекторию целесообразно заменить ломаной линией протяженностью 300-500 м в зависимости от ее кривизны. Таким образом удастся сократить объем памяти бортового процессора 3 для записи координат номинальной траектории (кривая 2). Так при Д=1000 км и задании координат через 1 м необходимо V=1000·1000·3·4 б=12 Мгб памяти.
Если отклонение по координате Z dz=Zтекущее-Zноминал>М, М - заданное отклонение от номинальной траектории полета ЛА, - надо рассчитывать подтяг стропы (левой) и реализовать на 1/2 от полученной расчетной;
при dz<М - надо рассчитывать подтяг стропы (правой) и реализовать на 1/2 от полученной расчетной. Величина М определяется степенью кривизны заданной траектории и может колебаться в пределах 10 м<М<100 м.
Условие: dz<0 и |dz|>М - это отклонение от траектории ближе к оси ОХ;
Условие: dz>0 и |dz|>М - это отклонение от траектории выше номинальной траектории (от оси ОХ);
Текущее значение dz (кривая 1) рассчитывается по данным навигационной системы 5 и блока 7; номинальное значение берется из таблицы номинальной траектории, записанной в бортовом процессоре 3.
Бортовой процессор, входящий в состав ЛА, содержит:
- программу управления системой наведения:
- программу обработки данных навигационной системы;
- программу подтяга строп;
- программы обработки информации;
- программу - диспетчер реализации циклограммы полета изделия;
- программу расчета аварийного режима остановки маршевого двигателя;
- программу расчета команд на форсаж маршевого двигателя;
- программу опроса приборов и датчиков 5, 6, 7, 8;
- программу перехода на другую траекторию.
Алгоритм подтяга строп
Требуемая длина затяжки правой и левой строп определяется по формулам:
где S - максимальная длина затяжки строп,
σГ, σв - коэффициенты команды в горизонтальной и вертикальной плоскости, причем
|σГ|+|σВ|≤1
σГ=ƒ1(εВ,εГ, )
)
σВ=ƒ2(εВ,εГ, )
)
Длина затяжки правой и левой строп определяется из дифференциальных уравнений;


где i - скорость затяжки строп. На фиг.6 приведен пример моделирования траектории полета ЛА при различных величинах подтяга строп.
Источники питания
В качестве первичного источника питания предлагается использовать аккумуляторную батарею (АВ) щелочную никель-кадмиевую 1ЩНКГЦ-6-1. Данная батарея не выделяет газов и паров электролиза при заряде, разряде, хранении и транспортировании. Либо аккумуляторные батареи АР 7-12 (12V/7AH/20HR) напряжением 12 В.
При анализе применения парашютов и парапланов следует иметь в виду, что параплан по своей конструкции является летательным аппаратом (ЛА), в то время как парашют - крыло способно только десантироваться из соответствующего носителя (самолета, вертолета).
Промышленное применение комплекса возможно в следующих отраслях: в нефтяной и газовой промышленностях - для облета нефтепроводов и выявления утечек нефтяных продуктов, несанкционированного подключения других предприятий и стран, предотвращения аварийных ситуаций и террористических акций; для геологов - доставка сообщений, продуктов, приборов и т.п.; для полярников - разведка новых районов, контроля параметров атмосферы и ландшафта в труднодоступных районах и т.п.; для спецназа - решение задач при террористической угрозе населению; для служб МВД; для служб МЧС; для метеорологов, экологов и т.п. - проведение разведки труднодоступных районов при проведении экологических экспертиз и т.д.; для мониторинга окружающей среды; для разведки рыбных запасов; для проведения аэрофотосъемки заданных районов земной поверхности; в геодезии; в сельском хозяйстве - малообъемная обработка полей; для контроля состояния магистралей; для спасения людей в экстремальных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПЕРАТИВНОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ ТЕРПЯЩИМ БЕДСТВИЕ ЛЮДЯМ В УДАЛЕННЫХ РАЙОНАХ С НЕТОЧНО ИЗВЕСТНЫМИ КООРДИНАТАМИ И РАКЕТНЫЙ КОМПЛЕКС ОПЕРАТИВНОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ | 2016 |
|
RU2651350C1 |
| УПРАВЛЯЕМАЯ ПАРАШЮТНАЯ СИСТЕМА | 1996 |
|
RU2111898C1 |
| АВТОМАТИЗИРОВАННАЯ ПАРАШЮТНАЯ СИСТЕМА ДОСТАВКИ ГРУЗОВ | 2021 |
|
RU2761675C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МАЛОРАЗМЕРНОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2820041C1 |
| УПРАВЛЯЕМАЯ ПАРАШЮТНАЯ СИСТЕМА ДЛЯ ДОСТАВКИ ГРУЗОВ | 1993 |
|
RU2039680C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2480728C2 |
| СПОСОБ ПОРАЖЕНИЯ УДАЛЕННЫХ ЦЕЛЕЙ | 2019 |
|
RU2730793C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С ВОЗМОЖНОСТЬЮ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРИ ВОЗНИКНОВЕНИИ НЕШТАТНОЙ (АВАРИЙНОЙ) СИТУАЦИИ | 2016 |
|
RU2632559C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ МЯГКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2400410C1 |

Изобретение относится к управляемым парапланным системам. Система включает параплан, последовательно соединенные навигационную систему в качестве системы фиксации и определения координат, магнитометр, высотомер и космическую навигационную систему. Выходы навигационной системы, магнитометра, высотомера, космической навигационной системы соединены со входами командного блока. Выход командного блока соединен со входами блока управления стропами, маршевого двигателя и блока полезной нагрузки и концентратора локальной сети, который связан с входами и выходами блока дистанционного управления и антенной сети. Изобретение обеспечивает автономность при старте, полете и посадке и точность приземления. 6 ил., 1 табл.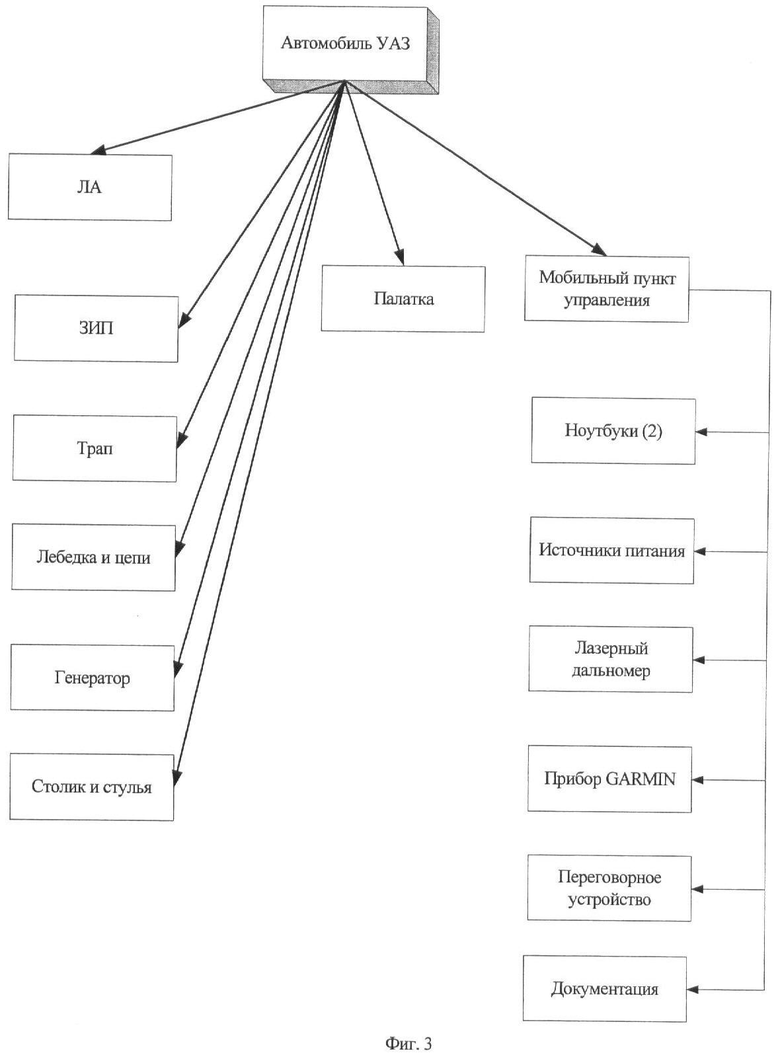
Управляемая парапланная система, включающая планирующую оболочку с блоком полезной нагрузки, командным блоком, блоком управления стропами, систему фиксации и определения координат, отличающаяся тем, что в ней планирующая оболочка представляет собой параплан, в качестве системы фиксации и определения координат она содержит навигационную систему, дополнительно она содержит магнитометр, высотомер или вариометр и космическую навигационную систему, при этом навигационная система, магнитометр, высотомер и космическая навигационная система последовательно соединены так, что их выходы соединены со входами командного блока, а выход командного блока соединен со входами блока управления стропами, маршевого двигателя и блока полезной нагрузки и концентратора локальной сети, который связан с входами и выходами блока дистанционного управления и антенной сети.
| УПРАВЛЯЕМАЯ ПАРАШЮТНАЯ СИСТЕМА | 1996 |
|
RU2111898C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПЛАНИРУЮЩИМ ПАРАШЮТОМ | 1994 |
|
RU2094325C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПАРАПЛАНОМ | 1993 |
|
RU2078368C1 |
| US 2004084567 A1, 06.05.2004 | |||
| WO 2007107018 A1, 27.09.2007. | |||

