Область техники, к которой относится изобретение
Изобретение относится к часовому механизму, включающему, по меньшей мере, одну основную пластину и стержень для удержания набора шестерен, установленных с обеих сторон, нижний шарнир которого находится в базовой точке указанной основной пластины, в котором указанный механизм включает средство регулировки высоты, по меньшей мере, первой точки указанного стержня относительно указанной пластины в направлении оси вращения указанного набора шестерен, указанная первая точка в проекции на базовую плоскость указанной пластины, перпендикулярной указанной оси вращения указанного набора шестерен, расположена на первом ненулевом расстоянии от указанной базовой точки.
Изобретение также относится к часам, включающим, по меньшей мере, один механизм данного типа.
Изобретение относится к области прецизионного приборостроения, а более конкретно к области часового дела. Оно, в частности, относится к часовым механизмам, включающим наборы шестерен, шарнирно установленных между двумя конструкционными элементами.
Уровень техники
Регулировка вибрации набора шестерен часового механизма, шарнирно установленных между двумя конструкционными элементами, в частности между пластиной и стержнем, также называемым мостом в случае стержня баланса, часто оптимизирует функционирование набора шестерен и работу механизма, в который он встроен. Часто данная вибрация не поддается регулировке и вызвана производственными допусками и рабочими люфтами. Для устранения данного нерегулируемого диапазона опытный часовой мастер знает, как выполнить местную деформацию одного из компонентов узла, наименее жесткого компонента, например моста для регулировки вибрации, например, с амплитудой 20-40 мкм при регулировке баланса в Т1.
Данная операция является сложной, неточной и дорогой по временным затратам, требует высокой квалификации персонала, не является воспроизводимой и не поддается автоматизации.
Другой вариант представляет собой изменение вручную положения стержня относительно основной пластины и, в частности, изменение положения кронштейна амортизатора подшипника, содержащегося в пластине относительно стержня или наоборот, что требует вывинчивания элемента и, как и вышеприведенном случае, влияет на удерживающее усилие амортизатора и/или приводит к деформации, по меньшей мере, одного из компонентов, что является нежелательным.
Таким образом, предпочтительной является механическая регулировка, поскольку она позволяет решить вышеупомянутые проблемы воспроизводимости, доступна для менее квалифицированного персонала и может быть автоматизирована. Однако доступного пространства внутри калибра обычно не достаточно для размещения дополнительного регулировочного механизма, особенно в направлении толщины часового механизма, в котором обычно необходимо проводить данный тип регулировки вибраций.
В патенте Франции №1545748 на имя фирмы THE UNITED STATES TIME CORPORATION (Часовая корпорация США) описывается устройство для осевой регулировки балансового моста относительно основной пластины при помощи кулачкового элемента, ось которого перпендикулярна пластине, включающее эксцентрическую головку, взаимодействующую с наклонной нижней поверхностью моста для регулировки положения последнего. Данное устройство включает средство фиксации положения.
В заявке на патент Чехии №705087 А2 на имя фирмы HUBOLT SA описывается элемент для регулировки расстояния между мостом и пластиной, снабженный деталью с внешней резьбой, ввинчиваемой в мост и включающей зубчатое колесо.
Раскрытие изобретения
Изобретение предлагает создание механического средства регулировки вибрации набора шестерен часового механизма без изменения размеров механизма, позволяющего осуществлять простое преобразование существующего механизма с меньшими затратами путем воздействия на минимально возможное число компонентов простыми операциями механообработки. Регулировка по изобретению также предусматривает простоту автоматизации.
Таким образом, изобретение относится к часовому механизму, включающему, по меньшей мере, одну основную пластину и стержень для удержания набора шестерен, установленных с обеих сторон, нижний шарнир которого находится в базовой точке указанной основной пластины, в котором указанный механизм включает средство регулировки высоты, по меньшей мере, первой точки указанного стержня относительно указанной пластины в направлении оси вращения указанного набора шестерен, указанная первая точка в проекции на базовую плоскость указанной пластины, перпендикулярной указанной оси вращения указанного набора шестерен, расположена на первом ненулевом расстоянии от указанной базовой точки, отличающемуся тем, что указанное средство регулировки высоты включает средство управления, выполненное с возможностью вращения вокруг наклонной управляющей оси относительно указанной оси вращения указанного набора шестерен, и включает средство преобразования перемещения указанного управляющего средства и толкателя, выполненного с возможностью перемещения в направлении, параллельном указанной оси вращения указанного набора шестерен.
Изобретение также относится к часам, включающим, по меньшей мере, один механизм данного типа.
Краткое описание чертежей
Прочие признаки и преимущества изобретения станут очевидны из нижеследующего подробного описания со ссылками на прилагаемые чертежи, на которых:
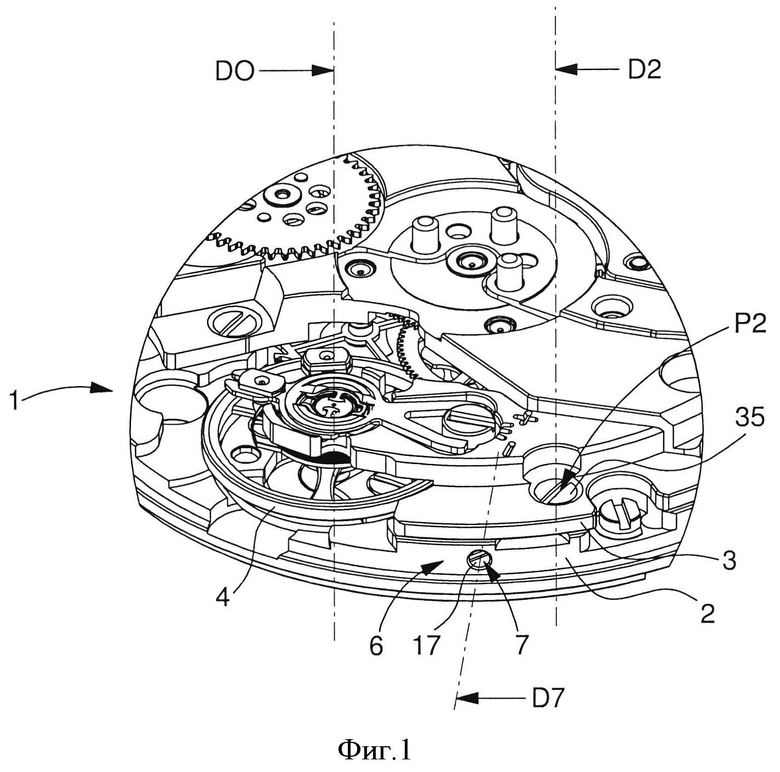
Фиг. 1 - схематический местный пространственный вид часового механизма, а более конкретно, механизма наручных часов, баланс которого удерживается между пластиной и стержнем баланса, также называемым балансовым мостом, указанный стержень может регулироваться относительно указанной пластины в соответствии с первым вариантом осуществления изобретения, показанным на Фиг. 1-7, при помощи установленного на ближайшем к наблюдателю периферическом участке пластины радиального винта, принадлежащего управляющему средству для средства регулировки высоты балансового моста по изобретению, указанный балансовый мост удерживается путем прижатия к пластине соседним винтом, и его ось параллельна оси баланса;
Фиг. 2 - аналогичный вид того же механизма после перемещения моста и баланса, на котором на оси указанного радиального регулировочного винта показан шарик, образующий толкатель для регулировки высоты баланса;
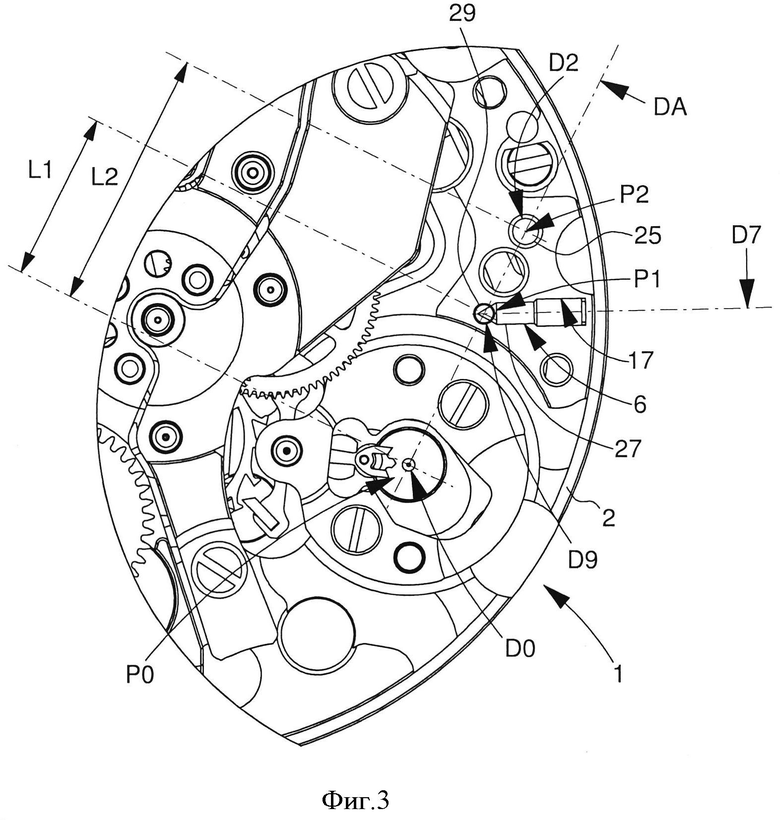
Фиг. 3 - схематический вид сверху того же участка механизма, на котором показана только пластина и обработанные участки для установки управляющего средства, средства регулировки высоты и крепежного средства;
Фиг. 4 - схематический местный вид в сечении механизма в окрестностях средства управления для средства регулировки высоты моста плоскостью, параллельной оси баланса, и проходящей через ось радиального винта, принадлежащего управляющему средству;
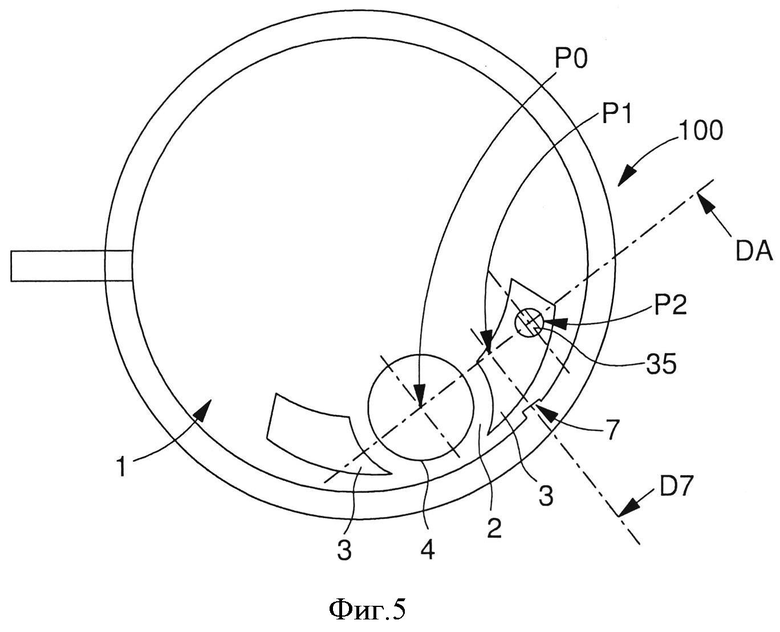
Фиг. 5 - схематический местный вид сверху наручных часов, включающих механизм данного типа;
Фиг. 6 - вид, аналогичный виду Фиг. 4, являющийся поперечным сечением пластины, снабженной радиальным регулировочным винтом, имеющим фиксирующее средство в виде внешней фиксирующей гайки;
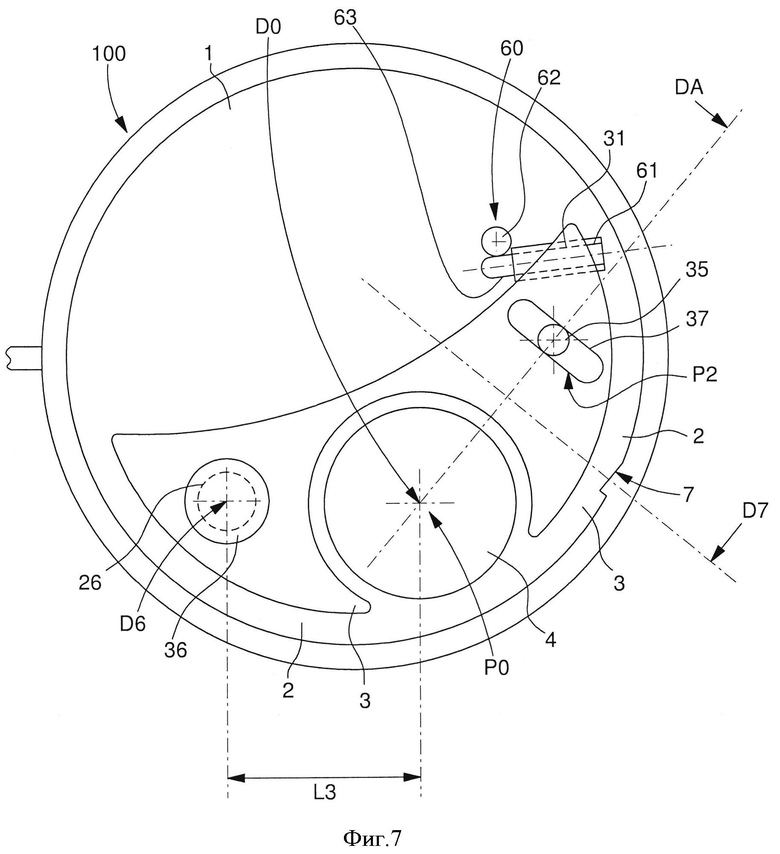
Фиг. 7 - вид, аналогичный виду Фиг. 5, на котором показаны наручные часы, включающие механизм по изобретению и также включающие угловую регулировку моста относительно пластины;
Фиг. 8-10 показывают второй вариант осуществления изобретения, для которого также справедливы Фиг. 5 и 7;
Фиг. 8 - схематический местный вид механизма в сечении плоскостью, проходящей через ось снабженного внешней резьбой толкателя, который приводится внутренней резьбой коронки, наружные зубья которой зацепляются с червяком, который формирует управляющее средство, плоскость сечения перпендикулярна оси указанного червяка;
Фиг. 9 - схематический вид сверху механизма, показанного на Фиг. 8, после установки на пластину без стержня;
Фиг. 10 - схематический вид сверху пластины в зоне установки механизма.
Осуществление изобретения
Изобретение относится к часовым механизмам, включающим наборы шестерен, шарнирно установленные между двумя конструкционными элементами, для которых предпочтительна осевая регулировка. Более конкретно, изобретение относится к области регулировочных механизмов.
Хотя описание изобретения приводится в большей степени для регулировки осевой вибрации баланса, очевидно, что часовой мастер сможет применить его для осевой регулировки других наборов шестерен, имеющих тот же тип узла.
«Набор шестерен» в данном документе означает любой компонент часового механизма, установленный с возможностью перемещения на шарнирах. На фигурах показан конкретный вариант, в котором набор шестерен является балансом.
Изобретение относится к часовому механизму 1, включающему, по меньшей мере, одну основную пластину 2 и стержень 3 для удержания набора 4 шестерен с обеих сторон, в частности баланса, и в этом случае стержень 3 баланса также называется балансовый мост. Нижний шарнир 5 набора 4 шестерен занимает базовое положение Р0 на пластине 2.
Механизм 1 включает средство 6 регулировки высоты, по меньшей мере, первой точки Р1 стержня 3 относительно пластины 2 в направлении, параллельном направлению оси D0 вращения набора 4 шестерен.
Эта первая точка Р1 в проекции на базовую плоскость PR пластины 2, перпендикулярную оси D0 вращения набора 4 шестерен, находится на первом ненулевом расстоянии L1 от данной базовой точки Р0.
Согласно изобретению средство 6 регулировки высоты включает управляющее средство 7, которое выполнено с возможностью вращения вокруг наклонной управляющей оси D7 относительно направления оси D0 вращения набора 4 шестерен. Данное регулировочное средство включает средство 8 преобразования перемещения управляющего средства 7, с одной стороны, и, с другой стороны, толкателя 9, выполненного с возможностью перемещения в направлении D9 параллельно оси D0 вращения набора 4 шестерен. В конкретном варианте осуществления изобретения толкатель 9 является магнитным, так же как и управляющее средство 7, и имеет полярность, вызывающую их притягивание друг к другу после установки в рабочее положение, при этом магнитное поле не создает помех для храповика.
Первый вариант осуществления изобретения показан на Фиг. 1-7.
Как показано на Фиг.4, управляющее средство 7 взаимодействует с ответным средством 17, расположенном в первом корпусе 27 на пластине 2.
В конкретном варианте осуществления изобретения управляющее средство 7 сформировано радиальным винтом, внешняя резьба которого взаимодействует с внутренней резьбой, образующей ответное средство 17, расположенное в первом корпусе 27, который представляет собой продолговатое полученное перфорированием углубление, содержащееся в пластине 2.
Управляющее средство 7 включает, как показано на Фиг. 4, средство 8 преобразования перемещения в форме конуса 80 или криволинейной поверхности.
Предпочтительно управляющая ось D7 идет в направлении, перпендикулярном направлению оси D0 вращения набора 4 шестерен.
Толкатель 9 также включает поверхность 91, которая является сферической, или криволинейной, или даже конической, если поверхность 80 сферическая или криволинейная, которая взаимодействует со средством 8 преобразования перемещения.
В не ограничивающем примере Фиг. 4 винт 7 имеет конический край, который взаимодействует со сферической чашкой толкателя 9, которая предпочтительно выполнена в форме шара. Диаграмма равновесия данного шара при взаимодействии с поверхностью 80 прорисована таким образом, чтобы избежать возникновения любых ограничений. Например, толкатель 9, сформированный из шара диаметром 0.40 мм, взаимодействует с конусом 80, половина угла при вершине которого на конце винта 7 равна 30°, направляемым цилиндрическим заплечиком 72 диаметром 0.6 мм; данный винт 7 с коническим наконечником имеет внешнюю резьбу 73 с шагом 0.11-0.15 мм, обеспечивающим хорошую чувствительность.
Пластина 2 включает направляющий корпус 29 для толкателя 9 вдоль прямолинейной оси D9, по существу параллельной оси D0 вращения набора 4 шестерен.
В одном особенно экономичном варианте осуществления изобретения за счет этого обеспечивает изменение существующей пластины за счет простого фрезерования двух пересекающих ее перфорированных отверстий, одного осевого, а другого радиального, при этом радиальное отверстие 27 снабжено внутренней резьбой 17, принимающей винт 7, а осевое отверстие 29 образует направляющий элемент для простого шара 9.
Толкатель 9 или шар может опираться непосредственно на нижнюю поверхность стержня 3, который в этом случае не требует повторной механической обработки, для преобразования имеющегося перемещения. В одном варианте толкатель может опираться на принимающую поверхность 39 моста: сферическую или коническую полость, канавку или подобный элемент для приема конца толкателя 9, который находится напротив средства 8 преобразования перемещения.
Конец толкателя 9, который взаимодействует с регулировочным средством 7, предпочтительно по-прежнему выступает над верхней поверхностью 20 пластины 2, направленной в сторону нижней поверхности 30 стержня 3, обеспечивая таким образом регулировку путем сближения или удаления друг от друга стержня 3 и пластины 2.
В конкретном варианте осуществления изобретения, как показано на Фиг.6, управляющее средство 7 включает фиксирующее средство 71, которое обеспечивает взаимодействие с пластиной 2 для фиксации управляющего средства 7 после регулировки относительно пластины 2 вдоль управляющей оси D7. В конкретном варианте данное фиксирующее средство 71 включает, по меньшей мере, одну фиксирующую гайку (установленную на винте, если управляющее средство 7 включает винт, как в настоящем случае) или, по меньшей мере, одну пружину, коническую пружину, или фиксирующее кольцо, или тому подобный элемент.
Стержень 3 может в зависимости от варианта осуществления механизма 1 окружать набор 4 шестерен с обеих сторон своей оси D0 вращения либо в виде консоли выступать с одной стороны от оси D0; при такой конфигурации применяют термин «сквозной стержень балансира». Для фиксации стержня 3 на пластине 2 и правильной установки стержня относительно пластины требуется высококачественное обжатие, которое предпочтительно обеспечивается, по меньшей мере, одним зажимающим средством, таким как винт, и, по меньшей мере, одной установочной базой, такой как винт с шарнирным заплечиком, центрирующий штифт или подобный элемент, предпочтительно установочная база включает центрирующий элемент, такой как ось или штифт в бобышке или отверстии, или наоборот, и обеспечивающий совмещение элемент, такой как штифт в отверстии, совмещенный с центральным элементом или наоборот. Вне зависимости от того, применяется ли балансовый мост или поперечный балансовый стержень, центрирующая и совмещающая система остается той же.
В варианте, показанном на фигурах, механизм 1 включает затяжной винт 35, взаимодействующий с внутренней резьбой 25 пластины 2 вдоль прямолинейной оси D2, по существу параллельной оси D0 вращения набора 4 шестерен для притягивания стержня 3 до упора в толкатель 9. Данная внутренняя резьба 25 расположена в точке Р2 на втором ненулевом расстоянии L2 от базовой точки Р0 набора 4 шестерен. Предпочтительно данное второе расстояние L2 отличается от первого расстояния L1. В предпочтительном варианте, показанном на фигурах, прямолинейная ось D9 корпуса 29 и прямолинейная ось D2 внутренней резьбы 25 находятся в одной плоскости с осью D0 вращения набора 4 шестерен.
В конкретном варианте механизм 1 включает шарнирный винт 39, взаимодействующий с внутренней резьбой 26 пластины 2 вдоль прямолинейной шарнирной оси D9, по существу параллельной оси D0 вращения набора 4 шестерен для обеспечения угловой регулировки положения стержня 3 относительно пластины 2 вокруг этой прямолинейной оси D6 и для фиксации стержня 3 на пластине 2 путем зажатия в заданном угловом положении. Данная внутренняя резьба 26 расположена на третьем ненулевом расстоянии L3 от базовой точки Р0. В том же варианте механизм 1 предпочтительно включает средство 60 микрометрической угловой регулировки для регулировки относительного углового положения стержня 3 и пластины 2. Когда стержень 3 имеет принимающую поверхность 39 для толкателя 9, указанная принимающая поверхность 39 предпочтительно ограничена упорными поверхностями, которые ограничивают угловое перемещение при регулировке углового положения стержня относительно пластины 2, и затягивающий винт 35 опирается на плоскую поверхность стержня 3 или на плоскую канавку 37 стержня 3, ограниченную упорными поверхностями. В конкретном примере средство 60 микрометрической угловой регулировки включает винт 61, размещенный внутри по существу радиальной внутренней резьбы 21 пластины 2 или, соответственно, в по существу радиальной внутренней резьбе 31 стержня 3, и винт 61 обеспечивает выталкивание или вытягивание пальца 62, составляющего одно целое со стержнем 3 или, соответственно, с пластиной 2, например, в канавку 63, содержащуюся в винте 61, или в аналогичный элемент.
В варианте, показанном на Фиг. 8-10 преобразование перемещения происходит за счет винтового домкрата: управляющее средство 7 образовано червяком 75, который направляется первым корпусом 27, сформированным, по меньшей мере, одним гладким заплечиком, по меньшей мере, одного отверстия пластины 2, в котором указанный червяк 75 фиксируется в осевом направлении с одной стороны в заплечиком 77 червяка 75, которое взаимодействует с заплечиком 277 пластины 2, а с другой стороны штифтом 79, ввинченным в пластину 2 после установки червяка 75 для фиксации его грани 78.
Червяк 75 приводит коронку 81, ограниченную глухим отверстием 82 пластины 2, в которой она окружена головкой 83 толкателя 84, которая формирует толкатель 9. Коронка 81 включает внешние зубья 82, которые взаимодействуют с червяком 75, и внутреннюю резьбу 86, которая взаимодействует с внешней резьбой 87 толкателя 84. Данный толкатель включает два плоских участка 88, которые фиксируют при вращении в продолговатом отверстии 89 пластины 2. Соответственно, толкатель 84 выполнен с возможностью перемещения в направлении Ζ оси D9 общей для коронки 81 и толкателя 84 при приведении в движение червяка 75, например при помощи инструмента через паз 75А.
В предпочтительном варианте предварительное поджатие при помощи поджимающего средства 90, представленного на Фиг. 9 в виде спиральной пружины, позволяет снизить зазоры на стыке внешней и внутренней резьбы и в зубчатых зацеплениях и полностью прижать толкатель 84 к стержню 3.
Предпочтительно червяк 75 включает цилиндрический заплечик 75 В для направления его в отверстие 377 пластины 2.
Установка узла является простой: прежде всего производят установку толкателя 84 в коронку 81, их устанавливают в свой корпус 82, совмещая плоские участков 88 толкателя 84 с продолговатой канавкой 89, затем ввинчивают червяк 75 и упирают его в грань 277 пластины, затем перед установкой стержня 3 ввинчивают фиксирующий штифт 79.
Механизм 1 по изобретению предназначен для обеспечения простой регулировки в момент установки и поэтому управляющее средство 7 предпочтительно располагается на периферии пластины 2 и к нему имеется доступ после сборки всего механизма 1. Аналогичным образом, когда механизм 1 включает средство 60 микрометрической угловой регулировки, это средство также расположено на периферии пластины 2 или стержня 3 и к нему имеется доступ после сборки всего механизма 1.
Изобретение также относится к часам 100, включающим, по меньшей мере, один механизм 1 данного типа.
Таким образом, изобретение позволяет избежать деформирования часов, повторно использовать существующие компоненты, подвергнув их простым операциям механообработки, требует добавления только очень простых компонентов, таких как шарики, винты или им подобные компоненты для осуществления точной, быстрой воспроизводимой и автоматизируемой регулировки вибраций за счет наличия доступа к установочному винту с коническим наконечником на периферии пластины. Кроме того, то, что конструкция встраивается в габариты толщины пластины (или пластины и моста) означает отсутствие элементов, вставляемых в зоне набора шестерен, вибрация которых требует регулировки, которые могут мешать или сталкиваться с соседним компонентом или имеющимся набором шестерен.
Механизм является простым, легко встраивается в существующие часовые механизмы и обеспечивает большие возможности регулировки.





Изобретение относится к часовым механизмам, а именно к механизму для регулировки механической вибрации набора шестерен часового механизма, а также к часам, включающим, по меньшей мере, один механизм данного типа. Механизм (1) часовой, включающий основную пластину (2) и стержень (3) для удержания набора (4) шестерен в базовой точке (Р0), и средство (6) регулировки высоты данного стержня (3) относительно пластины (2) в направлении оси (D0) вращения набора (4) шестерен в первой точке (Р1), удаленной от базовой точки (Р0). Данное средство (6) регулировки высоты включает винт (7) или червяк (7) установленный с возможностью вращательного перемещения вокруг наклонной управляющей оси относительно оси (D0) вращения, и конус (80) или криволинейную поверхность для преобразования перемещения данного винта (7) или червяка (75) и толкателя (9), выполненного с возможностью перемещения в направлении (D9), параллельном оси (D0) вращения. Часы (100), включающие механизм (1) данного типа. Технический результат заключается в создании механизма механической регулировки вибрации набора шестерен часового механизма, без изменения размеров механизма. 2 н. и 22 з.п. ф-лы, 10 ил.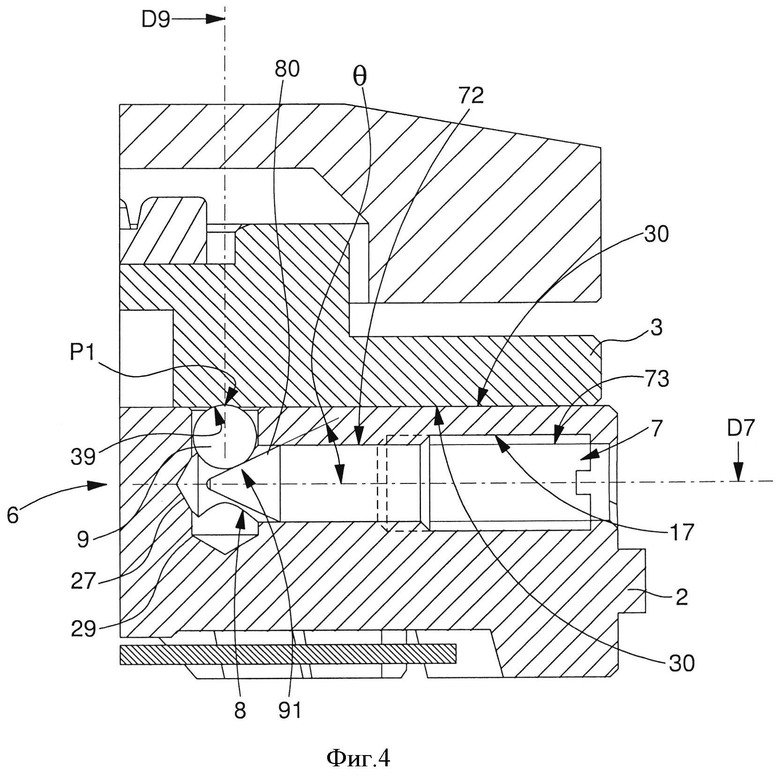
1. Механизм (1) часовой, включающий, по меньшей мере, одну основную пластину (2) и стержень (3) для удержания набора (4) шестерен с обеих сторон, нижний шарнир (5) которого находится в базовой точке (P0) указанной основной пластины (2), в котором указанный механизм (1) включает средство (6) регулировки высоты, по меньшей мере, первой точки (P1) указанного стержня (3) относительно указанной пластины (2) в направлении оси (D0) вращения указанного набора (4) шестерен, указанная первая точка (P1) в проекции на базовую плоскость (PR) указанной пластины (2), перпендикулярной указанной оси (D0) вращения указанного набора (4) шестерен, расположена на первом ненулевом расстоянии (L1) от указанной базовой точки (P0), отличающийся тем, что указанное средство (6) регулировки высоты включает средство (7) управления, выполненное с возможностью вращения вокруг наклонной управляющей оси (D7) относительно указанной оси (D0) вращения указанного набора (4) шестерен, и включает средство (8) преобразования перемещения между указанным управляющим средством (7) и толкателем (9), выполненным с возможностью перемещения в направлении (D9), параллельном указанной оси (D0) вращения указанного набора (4) шестерен.
2. Механизм (1) по п. 1, отличающийся тем, что управляющее средство (7) взаимодействует с ответным средством (17), расположенным в первом корпусе (27) на пластине (2).
3. Механизм (1) по п. 2, отличающийся тем, что указанное управляющее средство (7) сформировано винтом, внешняя резьба которого взаимодействует с внутренней резьбой, образующей ответное средство (17), расположенное в первом корпусе (27) на пластине (2).
4. Механизм (1) по п. 1, отличающийся тем, что указанное управляющее средство (7) включает указанное средство (8) преобразования перемещения в виде конической или криволинейной поверхности.
5. Механизм (1) по п. 1, отличающийся тем, что указанная управляющая ось (D7) имеет направление, перпендикулярное направлению указанной оси (D0) вращения указанного набора (4) шестерен.
6. Механизм (1) по п. 1, отличающийся тем, что указанный толкатель (9) включает сферическую или криволинейную поверхность (91), которая взаимодействует с указанным средством (8) преобразования перемещения.
7. Механизм (1) по п. 1, отличающийся тем, что указанный стержень (3) включает поверхность (39) для приема конца указанного толкателя (9), который расположен напротив указанного средства (8) преобразования.
8. Механизм (1) по п.1, отличающийся тем, что указанная пластина (2) включает корпус (29) для направления указанного толкателя (9) вдоль прямолинейной оси (D9), по существу параллельной указанной оси вращения (D0) указанного набора (4) шестерен.
9. Механизм (1) по п.1, отличающийся тем, что указанное управляющее средство (7) включает фиксирующее средство (71), предназначенное для взаимодействия с указанной пластиной (2) для фиксации указанного управляющего средства (7) после регулировки относительно указанной пластины (2) вдоль указанной управляющей оси (D7).
10. Механизм (1) по п.9, отличающийся тем, что указанное фиксирующее средство (71) включает, по меньшей мере, одну фиксирующую гайку или, по меньшей мере, одну пружину.
11. Механизм (1) по п.1, отличающийся тем, что механизм включает затягивающий винт (35), взаимодействующий с внутренней резьбой (25) указанной пластины (2) вдоль прямолинейной оси (D2), по существу параллельной указанной оси (D0) вращения указанного набора (4) шестерен для зажатия указанного стержня (3) с упором в указанный толкатель (9), при этом указанная внутренняя резьба (25) расположена на втором ненулевом расстоянии (L2) от указанной базовой точки (P0).
12. Механизм (1) по п.11, отличающийся тем, что указанное второе ненулевое расстояние (L2) отличается от указанного первого расстояния (L1).
13. Механизм (1) по п.8, отличающийся тем, что механизм включает затягивающий винт (35), взаимодействующий с внутренней резьбой (25) указанной пластины (2) вдоль прямолинейной оси (D2), по существу параллельной указанной оси (D0) вращения указанного набора (4) шестерен для зажатия указанного стержня (3) с упором в указанный толкатель (9), при этом указанная внутренняя резьба (25) расположена на втором ненулевом расстоянии (L2) от указанной базовой точки (P0), отличающийся тем, что указанное второе ненулевое расстояние (L2) отличается от указанного первого расстояния (L1), и отличающийся тем, что указанная прямолинейная ось (D9) и указанная прямолинейная ось (D2) указанной внутренней резьбы (25) находятся в одной плоскости с указанной осью (D0) вращения указанного набора (4) колес.
14. Механизм (1) по п.8, отличающийся тем, что механизм включает шарнирный винт (36), взаимодействующий с внутренней резьбой (26) указанной пластины (2) вдоль прямолинейной оси (D6), по существу параллельной указанной оси (D0) вращения указанного набора (4) шестерен для обеспечения угловой регулировки указанного стержня (3) относительно указанной пластины (2) вокруг указанной прямолинейной шарнирной оси (D6) и для зажатия указанного стержня (3) с упором в указанную пластину (2) в заданном угловом положении, при этом указанная внутренняя резьба (26) находится на третьем ненулевом расстоянии (L3) от указанной базовой точки (P0).
15. Механизм (1) по п.14, отличающийся тем, что механизм включает средство (60) микрометрической угловой регулировки для регулировки углового положения указанного стержня (3) относительно указанной пластины (2).
16. Механизм (1) по п.15, отличающийся тем, что указанный стержень (3) включает поверхность (39) для приема конца указанного толкателя (9), которая противоположна указанному средству (8) преобразования перемещения, и отличающийся тем, что указанная поверхность (39) для приема указанного толкателя (9) ограничена упорными поверхностями, ограничивающими угловое перемещение при регулировке углового положения указанного стержня (3) относительно указанной пластины (2).
17. Механизм (1) по п.15, отличающийся тем, что указанное средство (60) микрометрической регулировки углового положения включает винт (61), размещенный в по существу радиальной внутренней резьбе (21) указанной пластины (2) или, соответственно, в по существу радиальной внутренней резьбе указанного стержня (3), указанный винт (61) обеспечивает выталкивание или вытягивание пальца (62), выполненного как одно целое с указанным стержнем (3), или, соответственно, с указанной пластиной (2).
18. Механизм (1) по п.15, отличающийся тем, что указанное средство (60) микрометрической регулировки углового положения расположено на периферии указанной пластины (2) или указанного стержня (3), и к нему обеспечивается доступ после сборки всего указанного механизма (1).
19. Механизм (1) по п.1, отличающийся тем, что указанное управляющее средство (7) расположено на периферии указанной пластины (2), и к нему обеспечивается доступ после сборки всего указанного механизма (1).
20. Механизм (1) по п.1, отличающийся тем, что указанный толкатель (9) является магнитным, как и указанное управляющее средство (7), и имеет полярность, которая обеспечивает взаимное притяжение указанного толкателя и управляющего средства после сборки в рабочее положение.
21. Механизм (1) по п.1, отличающийся тем, что передача движения происходит через винтовой домкрат, указанное управляющее средство (7) сформировано червяком (75), который направляется в указанном первом корпусе (27), в котором указанный червяк (75) фиксируется в осевом направлении, указанный червяк (75), приводящий наружные зубья (85) коронки (81), ограничен внутри глухого отверстия (82) указанной пластины (2), указанная коронка (81), включающая внутреннюю резьбу (86), взаимодействует с внешней резьбой (87) указанного толкателя (89), который может свободно перемещаться поступательно, но зафиксирован от вращательного перемещения.
22. Механизм (1) по п.21, отличающийся тем, что механизм включает средство (90) предварительного поджатия или спиральную пружину для прижатия указанного толкателя (9) к указанной пластине (3).
23. Механизм (1) по п.1, отличающийся тем, что указанный набор (4) шестерен является колесом баланса.
24. Часы (100), включающие, по меньшей мере, один механизм (1) по п.1.
| НАБОР КОМПЛЕКТУЮЩИХ ДЛЯ СБОРКИ НА МЕСТЕ ОПОРЫ КАССОВОГО БОКСА И ОПОРНАЯ ТУМБА КАССОВОГО БОКСА | 2013 |
|
RU2560055C2 |
| Стыковое соединение кровельных панелей | 1978 |
|
SU705087A1 |
| US 20130148479 A1, 13.06.2013 | |||
| EP 1804143 B1, 03.06.2009 | |||

