Уровень техники
Изобретение относится к датчиковым устройствам.
Во время съемки сейсмические данные обычно собирают, используя группу детекторов. В случае морских съемок гидрофоны измеряют флуктуации давления в воде, вызванные приходящими сейсмическими волнами. Геофоны измеряют векторные величины, такие как смещение, скорость или ускорение. В случае съемки на море, множество кабелей или морских кос, которые обычно разносят на расстояния около 100 м, буксируют позади судна. Каждый кабель имеет детекторы, разнесенные по кабелю с интервалами. В случае наземных съемок, группу геофонов укладывают на грунт, при этом расположение геофонов соответствует конфигурации сетки. Группа детекторов детектирует сейсмические сигналы от ревербераций сигнала сейсмического источника, такого как пневмопушка для морских съемок. При получении данных на дне океана (с помощью донной косы или морской донной съемки), группу детекторов фиксируют на морском дне. В этом случае источником может быть пневмопушка, установленная на судне.
Различия между разными типами съемок являются значительными, в основном вследствие различных характеристик распространения разных физических сред. Существуют различные проблемы и имеются различные эффекты для смягчения их в разных средах съемки. Например, морские съемки включают в себя очень сильные отражения от морского дна, где имеется большое различие между скоростями акустических волн по каждую сторону от границы. Наземные съемки подвержены распространению нежелательных волн, включающих в себя волны сдвига (также известные как S-волны) и волны Лява, которые не проявляются при съемках на море. По этой причине разные аппаратные средства и разные методы обработки данных используют в различных средах съемки.
Существуют четыре основных типа волн, детектируемых датчиками наземной съемки. Существуют S-волны, волны Лява, P-волны (также известные как первичные волны, поскольку они первыми детектируются после землетрясения) и волны Релея. Волны Релея и Лява являются горизонтально распространяющимися поверхностными волнами, тогда как S-волны и P-волны распространяются через тела и поэтому являются наиболее интересными при сейсмологических исследованиях. P-волны являются волнами сжатия, волны Релея имеют сложное движение, включающее в себя моды сжатия, а S-волны и волны Лява не имеют компоненты сжатия.
Волны Релея и Лява совместно называют «поверхностной волной». Эти волны обычно считают шумом, и в некоторой степени они затеняют отражения от границ исследуемой геологии. По этой причине удаление эффектов поверхностной волны из данных наземной съемки представляет значительный интерес. Разработаны различные методы, которые уменьшают амплитуду поверхностной волны и тем самым повышают отражения.
Обычно используемый метод включает в себя расстановку плотных полевых групп или одиночных датчиков в виде геофонов вертикального типа. Поверхностную волну ослабляют, используя фильтры по углам наклона или скоростные фильтры при дополнительной обработке данных. Чтобы исключать пространственный аляйсинг, этот метод требует по меньшей мере два геофона на наименьшую длину волны вдоль линии наблюдения, то есть в направлении источник-приемник. Боковое рассеяние энергии сейсмических волн можно уменьшать, используя двумерную группу геофонов. В идеальном случае, такая группа имеет одинаковые интервалы выборки как вдоль линии наблюдения так и поперек относительно сейсмического источника.
Когда доступны данные с трехкомпонентных геофонов, можно применять поляризационную фильтрацию. Поляризационная фильтрация идентифицирует часть волны Релея в поверхностной волне по сдвигу фазы на 90° между ее горизонтальной и вертикальной компонентой, что позволяет удалять ее обработкой данных. Поляризационную фильтрацию рассмотрели Kragh и Peardon, 1995, “Ground roll and polarization”, First Break, 13, 9, pp.369-378, ISSN (printed): 0263-5046, и позднее поддержали Kappius и Grewe, 2002, “Adaptive vector filters for ground roll reduction”, CSEG Geophysics, во время составления заявки информация была доступна на сайте:
http://www.cseg.ca/conferences/2002/2002abstracts/Kappius_R_Adaptive_Vector_Filters_for_Ground_Roll_Reduction_.pdf.
Омнифон является устройством с геофонами горизонтального и вертикального типов и блоком обработки сигналов, который применяет поляризационный фильтр до вывода данных, как его описали Lawton D.C. и Bertam M.B., 1991, во время составления заявки информация была доступна на сайте:
http://www.crewes.org/Reports/1991/1991-01.pdf.
Поскольку медленно распространяющуюся поверхностную волну ослабляют локально, минимальная требуемая пространственная выборка зависит от отражения быстрой сейсмической волны. Фактически, при выполнении съемки таким способом обычно требуется небольшое количество геофонных станций. Однако методы поляризационной фильтрации не работают удовлетворительно в сложных областях вблизи поверхности, поскольку в них не учитываются рассеянные волны Лява, присутствующие в данных, регистрируемых геофоном горизонтального типа.
Сущность изобретения
В соответствии с изобретением предложено датчиковое устройство, выполненное с возможностью установки на границе раздела земля-воздух, при этом датчиковое устройство содержит:
заполненный текучей средой корпус; и
компоновку датчиков, поддерживаемую внутри корпуса и непосредственно связанную с текучей средой с тем, чтобы детектировать ее перемещение.
Датчиковые устройства согласно изобретению могут удалять эффекты поверхностной волны на месте расположения датчика, исключая необходимость удаления эффектов обработкой данных.
Датчиковое устройство может быть выполнено с возможностью установки на границе раздела земля-воздух посредством содержания связывающего устройства, расположенного на нижней части корпуса. В качестве альтернативы или дополнительно, датчиковое устройство может быть выполнено с возможностью установки на границе раздела земля-воздух посредством содержания уровня, ориентируемого совместно с датчиком компоновки датчиков.
Компоновка датчиков может содержать гидрофон и в ней могут отсутствовать геофоны и акселерометры.
Компоновка датчиков может содержать три гидрофона, скомпонованных обычно горизонтально и в различных ориентациях друг другу.
Компоновка датчиков может содержать гидрофон и один или более геофонов или акселерометров. В качестве альтернативы, в компоновке датчиков может отсутствовать гидрофон и она может содержать два или более геофонов или акселерометров. В любом случае компоновка датчиков может содержать два геофона или акселерометра, скомпонованных обычно горизонтально и в различных ориентациях друг другу. В этом устройстве, компоновка датчиков может включать в себя вертикально выровненный геофон или акселерометр и горизонтально выровненный геофон или акселерометр. Компоновка датчиков может включать в себя два горизонтально выровненных геофона или акселерометра, выровненных ортогонально друг другу.
Датчиковое устройство, заявленное в любом предшествующем притязании, может содержать компоновку механической развязки для механической развязки одного или более датчиков компоновки датчиков от корпуса. Компоновка механической развязки может содержать пружину и компоновку амортизаторов. В случае гидрофона с компенсацией ускорения механическая развязка не требуется.
Кроме того, установки, сконструированные с использованием датчиковых устройств согласно изобретению, могут получать заданное качество данных при значительно меньшем количестве датчиковых устройств, чем соответствующие установки предшествующего уровня техники. В частности, при заданном размере установки могут потребовать в два раза меньше датчиковых устройств, что приведет к снижению на 50% количества датчиковых устройств для одномерной группы и к снижению на 75% для двумерной группы.
Согласно второму аспекту изобретения предложена сейсмическая датчиковая установка, содержащая датчиковое устройство, устанавливаемое на границе земля-воздух, в которой датчиковое устройство содержит:
заполненный текучей средой корпус; и
компоновку датчиков, поддерживаемую внутри корпуса и непосредственно связанную с текучей средой с тем, чтобы детектировать ее перемещение.
Датчиковое устройство может быть установлено поверх поверхности земли на границе земля-воздух. В качестве альтернативы, он может быть частично заглублен в поверхность земли на границе земля-воздух или предусмотрен в буровой скважине.
Установка может содержать связывающее устройство, расположенное на нижней части корпуса. Установка может содержать уровень, ориентируемый совместно с датчиком компоновки датчиков.
Установка может содержать одномерную группу датчиковых устройств, устанавливаемых на границе земля-воздух. В качестве альтернативы, она может содержать двумерную группу датчиковых устройств, устанавливаемых на границе земля-воздух.
Согласно третьему аспекту изобретения предложена установка с сейсмическими датчиками, содержащая многочисленные датчиковые устройства, устанавливаемые на границе земля-воздух, при этом установка содержит многочисленные датчиковые устройств, в которых отсутствуют гидрофоны, и расположенные рядом с препятствием, многочисленные датчиковые устройства, содержащие:
заполненный текучей средой корпус; и
гидрофон и один или более геофонов или акселерометров, поддерживаемых внутри корпуса и непосредственно связанных с текучей средой с тем, чтобы детектировать ее перемещение.
Кроме того, установки согласно изобретению могут получать заданное качество данных при значительно меньшем количестве датчиковых устройств, чем соответствующие установки предшествующего уровня техники. В частности, при заданном размере установки могут потребовать в два раза меньше датчиковых устройств, что приведет к снижению на 50% количества датчиковых устройств для одномерной группы и к снижению на 75% для двумерной группы.
Краткое описание чертежей
Теперь только для примера варианты осуществления настоящего изобретения будут описаны со ссылкой на сопровождающие чертежи, на которых:
Фигуры 1 и с 3 по 12 являются схематичными иллюстрациями воплощенных датчиковых устройств с первого по одиннадцатое соответственно;
Фигуры с 2а по 2d являются графиками выходных сигналов датчиков в случае, когда датчиковое устройство из фигуры 1 подвергается воздействию различных типов волн;
Фигуры с 13 по 16 являются схематичными иллюстрациями воплощенных установок, включающих датчиковое устройство одного из: фигуры 1 и с 3 по 12;
Фигуры 17а и 18а являются схематичными иллюстрациями расстановок датчиковых устройств предшествующего уровня техники; и
Фигуры с 17b по 17d и с 18b по 18е являются схематичными иллюстрациями воплощенных расстановок датчиковых устройств.
На чертежах одинаковые ссылочные позиции обозначают одинаковые элементы.
Подробное описание
Первый вариант осуществления датчикового устройства проиллюстрирован на фигуре 1.
Датчиковое устройство 100 содержит корпус 101, который является небольшой закрытой коробкой. Корпус 101 заполнен текучей средой, например заполнен маслом. На фигуре текучая среда обозначена как «текучая среда». Корпус может быть образован, например, из металла или пластика.
Датчиковое устройство 100 включает в себя компоновку 102 геофонов и компоновку 103 гидрофонов.
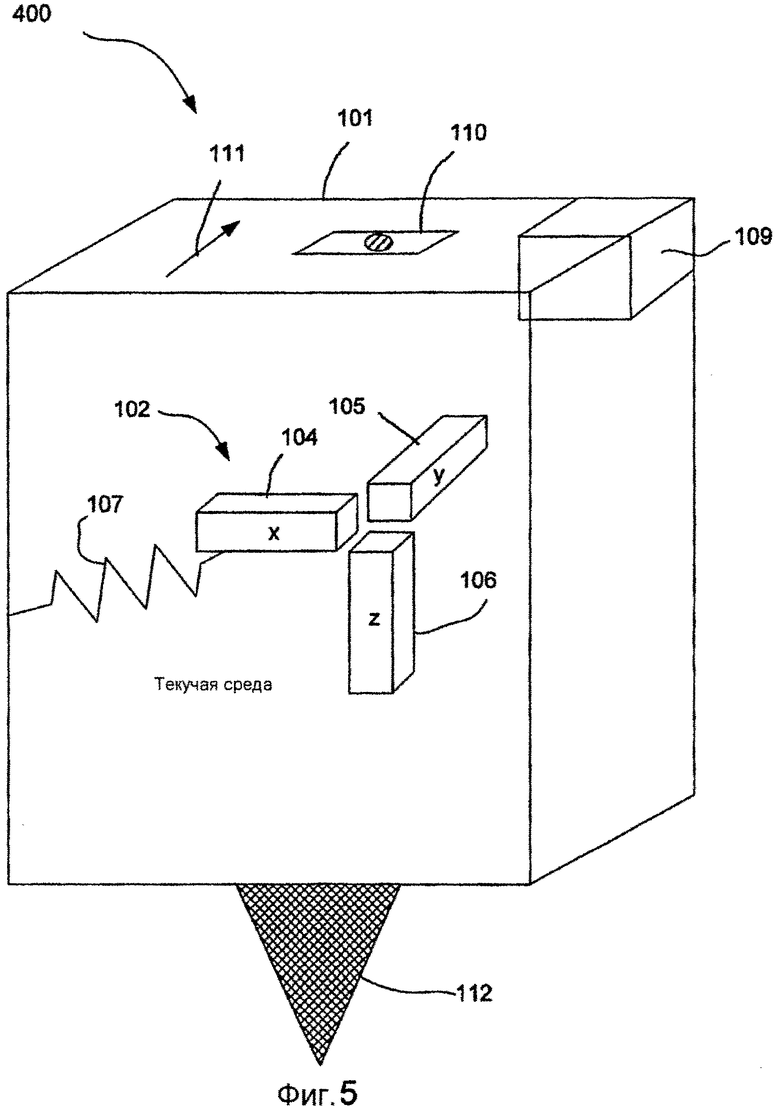
Компоновка 102 геофонов содержит первый, второй и третий геофоны 104, 105, 106. Первый и второй геофоны 104, 105 скомпонованы в горизонтальной плоскости. Первый геофон 104 ориентирован в направлении x, которое является перпендикулярным к направлению y, в котором ориентирован второй геофон 105. Третий геофон скомпонован в направлении z, которое является перпендикулярным как к первому, так и второму геофонам. Первый, второй и третий геофоны 104, 105, 106 могут называться геофонами x, y и z соответственно.
Геофоны 104, 105, 106 механически развязаны от корпуса 101 компоновкой 107 развязки. Точная форма компоновки 107 развязки может не быть критичной. Оно может включать в себя систему пружин или амортизаторов. Действие компоновки 107 развязки заключается в демпфировании перемещения корпуса 101 на частотах сейсмического диапазона частот от 1 Гц до 200 Гц. Вследствие механической развязки геофонами 104-106 воспринимается перемещение только текучей среды. Компоновка 107 развязки также функционирует для поддержания компоновки 102 геофонов в правильном положении и ориентации внутри корпуса 101.
Предпочтительно, чтобы компоновка 102 геофонов имела нейтральную плавучесть в текучей среде. Следствием этого является особенно эффективная механическая развязка компоновки 102 геофонов от корпуса 101.
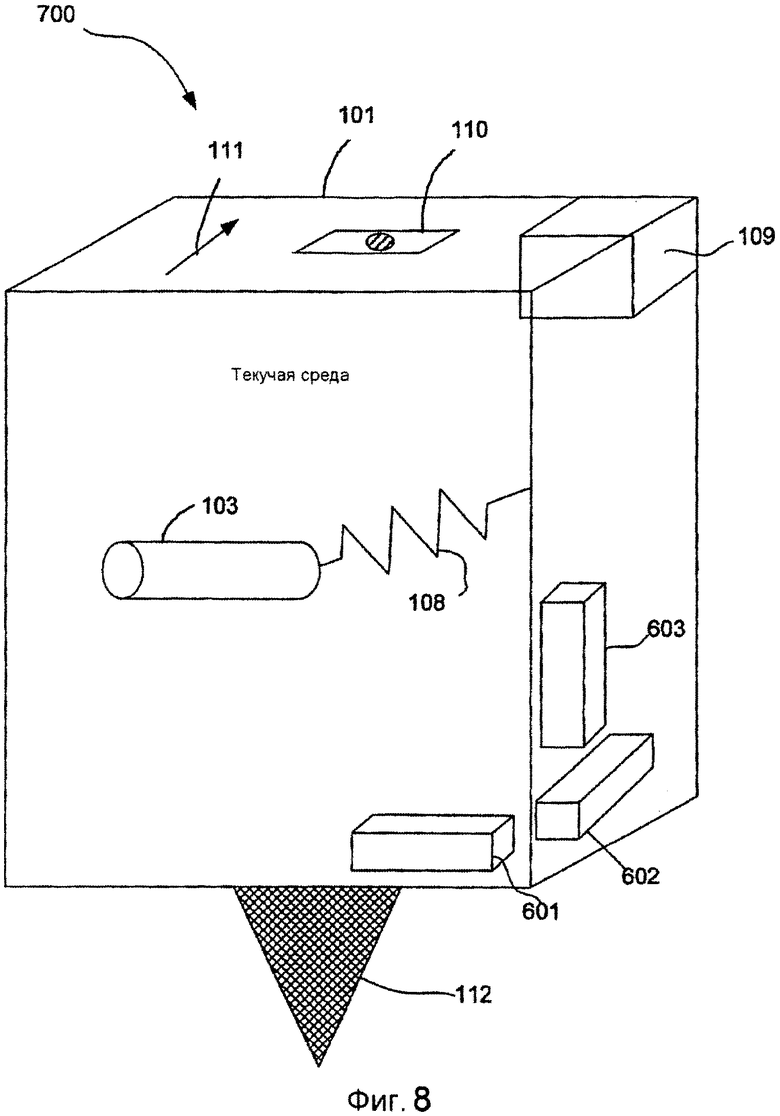
Компоновка 103 гидрофонов содержит единственный гидрофон. Гидрофон 103 механически развязан от корпуса 101 компоновкой 108 развязки. В качестве альтернативы, используется гидрофон 103 с компенсацией ускорения, и в этом случае компоновка механической развязки не предусматривается. В любом случае предпочтительно, чтобы компоновка 103 гидрофонов имела нейтральную плавучесть в текучей среде. Компоновка 103 гидрофонов прикреплена к корпусу 101 датчиков через компоновку 108 развязки или отдельную компоновку в случае гидрофона с компенсацией ускорения с тем, чтобы она удерживалась в правильном положении внутри корпуса 101.
В этом варианте осуществления, ориентация гидрофона 103 не является существенной.
Компоновка 102 геофонов и компоновка 103 гидрофонов могут быть снабжены миниатюрным модулем TV-001 векторного датчика, изготавливаемым Wilcoxon Research Inc. Этот модуль датчика является небольшим и имеет нейтральную плавучесть. Вместо него можно использовать любую другую подходящую компоновку.
Компоновка 103 гидрофонов и компоновка 102 геофонов соединены проводами с модулем 109 электроники. Провода скомпонованы так, чтобы минимизировалась механическая связь между компоновками 102, 103 датчиков и корпусом 101. Модуль 109 электроники имеет интерфейс, функцию обработки данных и связи. Функция связи может быть проводной или беспроводной и обеспечивает соединение через базовую станцию с оборудованием сбора данных (не показан), рассматриваемым ниже. В качестве альтернативы или в дополнение модуль 109 электроники может включать в себя запоминающее устройство для хранения собираемых данных, связь которого с оборудованием сбора данных может быть осуществлена в более поздний период времени.
Датчиковое устройство 100 включает в себя источник питания (не показан), которым может быть, например, батарея или солнечный генератор и компоновка хранения.
Датчиковое устройство 100 включает в себя уровень 110, установленный на самой верхней поверхности корпуса 101. Уровень 110 выровнен относительно плоскости, в которой лежат первый и второй геофоны 104, 105. Уровень обеспечивает индикацию нахождения датчикового устройства 100 в горизонтальном положении, то есть когда он лежит горизонтально. Это дает оператору гарантию, что датчиковое устройство установлено так, что геофоны находятся в истинной горизонтальной плоскости. Стрелкой 111 обозначена самая верхняя поверхность корпуса 101. Стрелка выровнена относительно одного из геофонов 104, 105, 106, в этом случае относительно первого геофона 104. Как минимум стрелка имеет известную ориентацию относительно геофонов 104-106. Это дает оператору гарантию, что датчиковое устройство установлено с геофонами 104, 105, 106 в требуемой ориентации. В свою очередь это дает оператору гарантию, что многочисленные датчиковые устройства установки выровнены относительно друг друга.
Уровень 110 является приспособлением датчикового устройства, которое делает его пригодным для наземного применения. Стрелка 111 также является приспособлением датчикового устройства, которое делает его пригодным для наземного применения.
Датчиковое устройство также включает в себя связывающее устройство 112. В основной форме оно является коническим сплошным элементом, прочно прикрепленным к нижней стороне корпуса 101. Связывающее устройство 112 позволяет устанавливать датчиковое устройство 100 на земле. Это достигается тем, что при размещении на поверхности датчиковое устройство 100 частично заглубляют, прикладывая к датчиковому устройству 100 направленную вниз силу. Связывающее устройство 112 является приспособлением датчикового устройства, которое делает его пригодным для наземного применения. В качестве альтернативы, связывающее устройство 112 может содержать три выступающих вниз штыря, относительно часто используемых совместно с трехкомпонентными геофонами.
Как поясняется ниже, датчиковое устройство 100 устанавливают на границе земля-воздух.
В результате использования компоновки 108 развязки (или использования гидрофона 103 с компенсацией ускорения) и компоновки 107 развязки, компоновки 102, 103 геофонных и гидрофонных датчиков не подвергаются воздействию волн сдвига, которые достигают корпуса 101. Вместо этого геофоны 104, 105, 106 и гидрофон 103 подвергаются воздействию только акустических волн, которые распространяются через текучую среду, которая заполняет корпус 101. Следовательно, как поясняется ниже со ссылкой на фигуры с 2а по 2d, волны сдвига или волны Лява гидрофоном 103 не детектируются. Модуль электроники принимает с гидрофона 103 данные датчика, происходящие только от волн сжатия, а именно P-волн и волн Релея. Получающийся в результате набор данных легче интерпретировать, чем наборы данных, получаемые от обычных наземных датчиковых устройств. Возможность исключения из данных волн сдвига и волн Лява приводит к более высокому качеству данных об отражениях P-волн. Это было доказано путем численного моделирования методом конечных элементов.
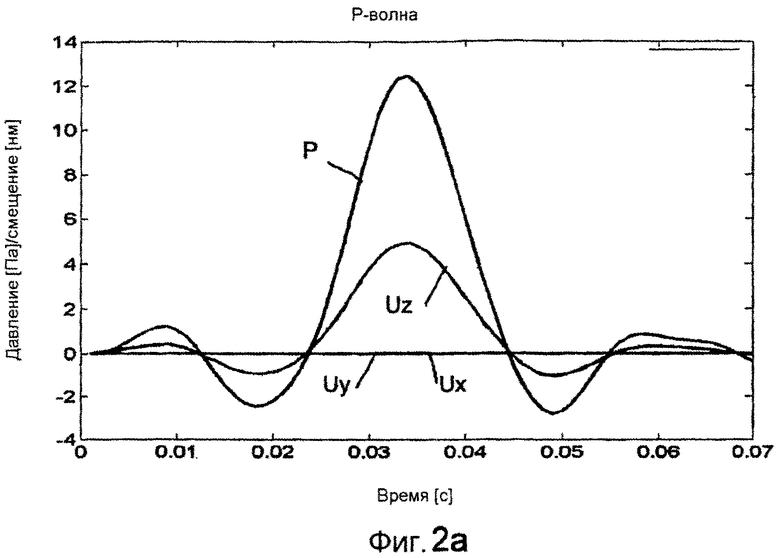
Пояснение волнового поля продольных волн на гидрофоне 103 для приходящих, распространяющихся вертикально P-волны и S-волны и распространяющихся горизонтально волн Лява и Релея теперь будет объяснено со ссылкой на фигуры с 2а по 2d. Для волны каждого типа моделировалось волновое поле продольных волн на гидрофоне 103. Результаты моделирования показаны на фигурах с 2а по 2d соответственно для волн различных типов.
На этих фигурах Р обозначает сигнал с гидрофона 103. Для получения результатов геофоны 104-106 не использовались. Ux, Uy и Uz обозначают соответственно компоненты x, y и z входного сигнала смещения на основании корпуса 101 датчиков, то есть вне текучей среды. Вертикальная ось обозначает давление (в паскалях) в случае гидрофона 103 и смещение (в нанометрах) в случае входного сигнала. Горизонтальная ось обозначает время в миллисекундах. Фигуры позволяют представить трехмерные компоненты различных волновых полей, и на них показаны результирующие выходные сигналы гидрофона и зависимость их от входной волны.
Как можно видеть на фигуре 2а, вертикально падающие P-волны имеют значительную компоненту z и не имеют компонент x и y. Эти волны обеспечивают значительный сигнал из гидрофона 103, имеющий такую же форму, как компонента Uz, и совпадающий с ней по фазе. Это ясно показывает, что давление является точно представляющим падающие P-волны.
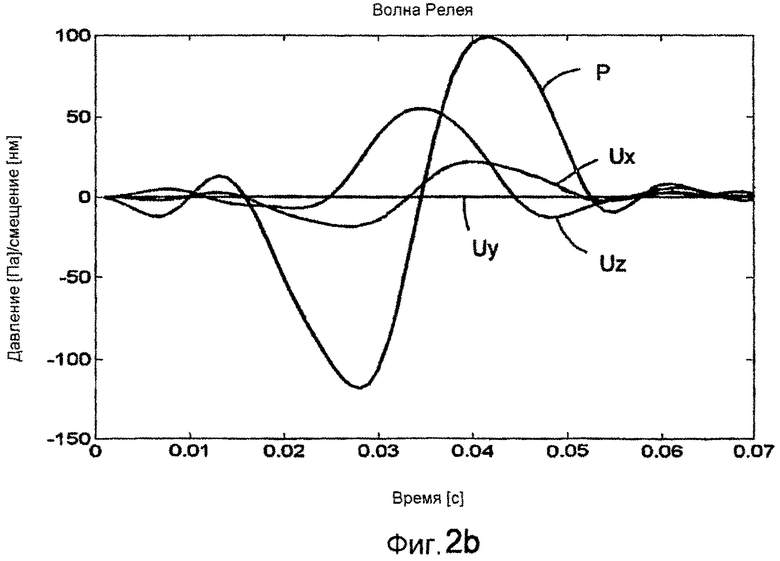
Как можно видеть на фигуре 2b, падающие волны Релея имеют значительную компоненту Uz, менее значительную компоненту Ux и очень малую компоненту Uy. Компоненты Uz и Ux являются связанными, но не совпадающими по фазе относительно друг друга. Причина состоит в том, что при волнах Релея, распространяющихся в твердом теле, происходит эллиптическое движение частиц, имеющее компоненту вдоль линии наблюдения и вертикальную компоненту, которые сдвинуты по фазе на 90°.
Очевидно, что волны Релея детектируются гидрофоном 103. Движение вдоль линии наблюдения и вертикальное движение частиц в текучей среде, обусловленное падающими волнами Релея, подавляется восходящими и нисходящими акустическими волнами, возникающими, когда вершина и основание корпуса 101 отклоняются падающей энергией сейсмических волн и горизонтально распространяющимися акустическими волнами, возникающими, когда стороны корпуса 101 отклоняются падающей энергией сейсмических волн. Выходной сигнал гидрофона 103 почти такой же, как Ux, хотя имеется небольшая разность фаз, поскольку требуется время для распространения сигналов от основания корпуса через текучую среду к гидрофону 103.
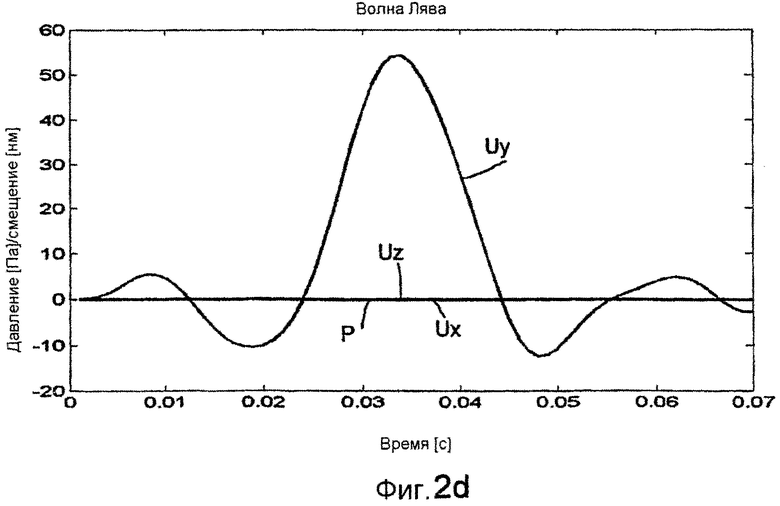
Как можно видеть на фигуре 2с, падающие S-волны обеспечивают значительный сигнал на первом (x) геофоне 104 и очень малый сигнал или не обеспечивают сигнала на других датчиках. Как можно видеть на фигуре 2d, падающие волны Лява обеспечивают значительный сигнал на втором (y) геофоне 105 и очень малый сигнал или не обеспечивают сигнала на других датчиках. В обоих случаях гидрофоном 103 сигнал не регистрируется.
Из анализа фигур с 2а по 2d должно быть понятно, что только P-волны и волны Релея, то есть волны с компонентой сжатия, измеряются гидрофоном 103. Это является весьма существенным преимуществом по сравнению с обычными наземными датчиковыми устройствами и, как поясняется ниже, это существенное преимущество можно использовать.
Снова со ссылкой на фигуру 1, поляризационную фильтрацию применяют к данным, обеспечиваемым компоновкой 102 геофонов, чтобы отделить P-волну от поверхностной волны. Поляризационную фильтрацию можно выполнять поляризационным фильтром, включенным в состав модуля 109 электроники, или можно выполнять находящимся на расстоянии поляризационным фильтром (не показан), в реальном времени или в более поздний период времени. Как должно быть понятно, компоненты вдоль линии наблюдения и вертикального перемещения текучей среды, измеряемые геофонами, сдвинуты по фазе на 90° (в зависимости от направления падения энергии сейсмических волн на корпус 101 каждым или обоими (x и y) геофонами 104, 105 детектируется сигнал вдоль линии наблюдения). Полное волновое поле текучей среды, обусловленное падающей волной Релея, является относительно сложным, поскольку углы корпуса 101 возбуждают акустические волны, которые привносят вклад в шум. Хотя датчиковое устройство 100 является небольшим по сравнению с наименьшей длиной волны сейсмического сигнала, представляющей интерес, изменения амплитуды волны Релея вдоль каждой границы раздела также будут возбуждать акустические волны.
При использовании датчикового устройства 100 поверхностную волну ослабляют поляризационным фильтром. Ослабление поверхностной волны означает, что результаты измерения давления указывают на давление, проистекающее от продольных волн, и исключается любая значительная компонента, проистекающая от волн сдвига.
Этим создаются два благоприятных эффекта. Во-первых, поляризационная фильтрация является более эффективной, чем в обычных датчиковых устройствах на основе геофонов, поскольку S-волны и волны Лява удаляются физической компоновкой датчикового устройства 100, то есть без обработки сигнала или данных. Во-вторых, поскольку необходимо брать выборки только волнового поля Р-волн (нет необходимости брать выборки поверхностной волны), разнесение между соседними датчиковыми устройствами 100 может быть больше, чем в обычных компоновках. Иначе говоря, пространственная выборка датчиковых устройств 100, необходимая для предоставления удовлетворительного уровня качества данных при сейсмической съемке, зависит от кажущейся скорости отраженных волн под датчиковым устройством 100.
Другое преимущество структуры датчикового устройства 100 заключается в том, что путем объединения записей с гидрофона и вертикального геофона можно удалять отражения от свободного пространства. Удаление эффектов отражений от свободного пространства приводит к разделению волновых полей восходящих и нисходящих волн. Это особенно выгодно, когда инструмент заглубляют глубже чем на 1 м, и в этой ситуации взаимодействие волновых полей восходящих и нисходящих волн может приводить к провалу в амплитудно-частотной характеристике в сейсмическом диапазоне частот. В противоположность этому, используя датчиковое устройство 100, провал в амплитудно-частотной характеристике можно исключать или, по меньшей мере, ослаблять его действие.
Второй вариант осуществления датчикового устройства 200 показан на фигуре 3. Со ссылкой на фигуру 3, компоновка 103 гидрофонов датчикового устройства включает в себя три гидрофона 201, 202, 203, поддерживаемых в корпусе 101 компоновкой 204 механической развязки, которая может содержать пружины и амортизаторы. Если используются гидрофоны 210-203 с компенсацией ускорения, компоновку механической развязки не предусматривают. Гидрофоны 201-203 скомпонованы в горизонтальной плоскости. Уровень 110 позволяет пользователю определять, когда гидрофоны 201-203 являются строго горизонтальными. Гидрофоны 201-203 расположены тесно, то есть расположены близко друг к другу. Гидрофоны 201-203 ориентированы под углом 60° друг другу. В этом примере гидрофоны 201-203 скомпонованы в форме равностороннего треугольника, хотя другая форма также может быть пригодной. Стрелка 111 обозначает ориентацию одного из гидрофонов 201-203 или, по меньшей мере, имеет известную ориентацию относительно гидрофонов 201-203.
В этом варианте осуществления используется то, что скорость текучей среды пропорциональна градиенту давления. Путем дифференцирования градиент давления в двух ортогональных направлениях можно вычислить при помощи:
 ,
, (уравнение 1)
(уравнение 1)
где
u i(x) является смещением, измеряемым в положении x в i-том направлении;
ρ является плотностью текучей среды внутри корпуса датчиков;
t является временем; и
Р является измеряемым давлением.
Результат измерения давления можно получать от одного гидрофона 201-203 или как среднее от всех трех гидрофонов 201-203.
Из теоремы о многоканальной выборке известно, что функция и ее производная могут быть точно интерполированы, когда их измеряют по меньшей мере один раз на длине волны. Давление P(t) и его пространственная производная Р'(t) могут быть реконструированы по равномерно выбираемым выборкам в t=2kπ/Ω в соответствии со следующим уравнением:
 , (t∈R, k∈Z).
, (t∈R, k∈Z).
(уравнение 2)
Это уравнение предложили Butzer P.L., Schmeisser G. и Stens R.L., 2001, “An introduction to sampling analysis, in Nonuniform sampling: theory and practice”, F. Marvasti ed., F. Kluwer Academic/Plenum Publishers, New York.
Обработка сигналов может быть осуществлена в модуле 109 электроники или может быть осуществлена на расстоянии в реальном времени или в более поздний период времени.
Как следствие изложенного выше, можно ясно видеть, что компоновка датчиков из фигуры 3 позволяет интерполировать регистрируемое поле давления в любой точке между двумя инструментами, разнесенными в пределах длины волны. Это является значительным улучшением по сравнению с обычной регистрацией геофонами, для которой требуются две станции на длине волны.
В случае двумерных групп аналогичного сокращения в поперечном направлении можно достигнуть, используя датчиковые устройства 200. В результате для двумерных групп с использованием датчиковых устройств 200 может потребоваться в четыре раза меньше инструментов, чем в обычных группах геофонов, при сохранении того же самого качества данных. В свою очередь это приводит к значительному сокращению количества аппаратуры, необходимой для полевой расстановки, и соответствующему снижению потребления электроэнергии. Количество каналов данных, необходимых для полевой расстановки заданного размера, также уменьшается при использовании датчиковых устройств 200, и происходит соответствующее уменьшение количества данных, которые должны храниться. Простой алгоритм двумерной интерполяции содержит интерполяцию данных в одном направлении путем использования надлежащего одномерного алгоритма и затем интерполяцию данных в другом направлении. В качестве альтернативы, можно использовать другие алгоритмы.
Теорема одномерной многоканальной интерполяции, определяемая приведенным выше уравнением (2), применима к бесконечному количеству регулярно разнесенных приемников. Однако относительно небольшое количество датчиковых устройств 200 можно расставлять без значительной потери точности. Например, одномерная группа из 64 датчиковых устройств 200 может использоваться без какой-либо значительной потери точности. Для интерполяции при меньшем количестве приемников и нерегулярно разнесенных данных можно использовать другие алгоритмы вместо указанных. Подходящий алгоритм может быть основан на алгоритме MIMAP, описанном While, Biegert и Jackson в “Gravity sample density reduction using gradiometry”, EAGE 67th Conference & Technical Exhibition - Madrid, Spain, 13-16 June 2005.
Теперь со ссылкой на фигуру 4 будет описан третий вариант осуществления датчикового устройства 300. Со ссылкой на фигуру 4, датчиковое устройство 300 содержит единственный гидрофон 103, соединенный с корпусом 101 через компоновку 108 механической развязки, как и в датчиковом устройстве 100. В составе нет уровня или стрелки.
Благодаря такой структуре датчиковое устройство 300 способно выполнять регистрацию волн сжатия, которые не загрязнены волнами сдвига. Результирующие данные относительно легко интерпретировать. Однако два датчиковых устройства 300 необходимо расставлять на протяжении представляющей интерес длине волны сигнала, чтобы гарантировать надлежащую выборку поверхностной волны.
Теперь со ссылкой на фигуру 5 будет описан четвертый вариант осуществления датчикового устройства 400. Физическая компоновка датчикового устройства 400 идентична компоновке датчикового устройства 100 за исключением того, что в датчиковом устройстве 400 отсутствует гидрофон.
Поляризационную фильтрацию применяют к данным, обеспечиваемым компоновкой 102 геофонов, чтобы отделять P-волну от поверхностной волны. Поляризационную фильтрацию можно выполнять поляризационным фильтром, включенным в состав модуля 109 электроники, или можно выполнять находящимся на расстоянии поляризационным фильтром (не показан), в реальном времени или в более поздний период времени. Как должно быть понятно, компоненты перемещения вдоль линии наблюдения и вертикального перемещения текучей среды, измеряемые геофонами, сдвинуты по фазе на 90° (в зависимости от направления падения энергии сейсмических волн на корпус 101 каждым или обоими (x и y) геофонами 104, 105 детектируется сигнал вдоль линии наблюдения). Полное волновое поле текучей среды, обусловленное падающей волной Релея, является относительно сложным, поскольку углы корпуса 101 возбуждают акустические волны, которые вносят вклад в шум. Хотя датчиковое устройство 400 является небольшим по сравнению с наименьшей длиной волны сейсмического сигнала, представляющей интерес, изменения амплитуды волны Релея вдоль каждой границы раздела также будут возбуждать акустические волны.
Поскольку необходимо брать выборки только волнового поля волн сжатия (нет необходимости брать выборки поверхностной волны), разнесение между соседними датчиковыми устройствами 400 может быть больше, чем в обычных расстановках. Иначе говоря, пространственная выборка датчиковых устройств 400, необходимая для обеспечения удовлетворительного уровня качества данных при сейсмической съемке, зависит только от кажущейся скорости отраженных волн под датчиковым устройством 100, а не от кажущейся скорости поверхностной волны.
Теперь со ссылкой на фигуру 6 будет описано пятое воплощенное датчиковое устройство 500. Структура датчикового устройства 500 является такой же, как структура датчикового устройства 100, за исключением того, что датчиковое устройство 500 не включает в себя геофон z. Это датчиковое устройство 400 обладает всеми полезными эффектами и преимуществами, рассмотренными выше применительно к датчиковому устройству 100, за исключением того, что отсутствие геофона z приводит к тому, что не столь просто получать разделение волновых полей восходящих и нисходящих волн.
Теперь со ссылкой на фигуру 7 будет описано шестое воплощенное датчиковое устройство 600. Датчиковое устройство 600 является таким же, как датчиковое устройство 100, за исключением того, что он включает в себя три дополнительных внешних геофона. Первый (x) внешний геофон 601, второй (y) внешний геофон 602 и третий (z) внешний геофон 603 присоединены к внешней стороне корпуса 101. Внешние геофоны 601-603 имеют такую же ориентацию, как их внутренние аналоги 104-106, но механически связаны с корпусом, а не развязаны механически от него. В качестве альтернативы, внешние геофоны 601-603 могут поддерживаться вблизи корпуса 101, но должны быть непосредственно связаны с каким-либо другим элементом датчикового устройства 600, а не с корпусом 101. Для обеспечения сигналов датчиков внешние геофоны 601-603 соединены с модулем 109 электроники.
В качестве альтернативы, внешние геофоны 601-603, имеющие такую же ориентацию, какую имеют их внутренние аналоги 104-106, могут быть ориентированы иначе при условии, что их относительные ориентации являются известными.
Внешние геофоны 601-603 воспринимают полное поле сейсмических волн и поэтому в их выходные сигналы включена поверхностная волна. Это позволяет выполнять полное разделение P- и S-волн в модуле 109 электроники или при последующей обработке. Разделение включает в себя дифференцирование значений выходных сигналов внутренних геофонов 104-106 по значениям выходных сигналов внешних геофонов 601-603 после применения надлежащих коррекций за влияние чувствительности и импеданса датчиков.
Теперь со ссылкой на фигуру 8 будет описано седьмое воплощенное датчиковое устройство 700. Датчиковое устройство 700 является таким же, как датчиковое устройство 600, за исключением того, что в него не включена внутренняя компоновка 102 геофонов.
Это датчиковое устройство 700 позволяет осуществлять ограниченное разделение P- и S-волн.
Теперь со ссылкой на фигуру 9 будет описано восьмое воплощенное датчиковое устройство 750. Датчиковое устройство 750 является таким же, как датчиковое устройство 500, за исключением того, что в него не включен y-геофон 105. Это датчиковое устройство 750 может использоваться с такой же эффективностью, если может гарантироваться, что x-геофон 104 выровнен относительно сейсмического источника, используемого при выполнении сейсмической съемки. Если выравнивание датчикового устройства относительно сейсмического источника, используемого при выполнении сейсмической съемки, неизвестно или может изменяться, датчиковое устройство 500 является более подходящим. Кроме того, датчиковое устройство 500 является более подходящим, если в исследуемой области имеется участок бокового рассеяния, что делает использование двумерных групп особенно выгодным.
Теперь со ссылкой на фигуру 10 будет описано девятое воплощенное датчиковое устройство 760. Датчиковое устройство 760 является таким же, как датчиковое устройство 100, описанное выше со ссылкой на фигуру 1, но в состав не включен x-компонентный геофон 104. Это датчиковое устройство 750 может использоваться с такой же эффективностью, если может гарантироваться, что y-геофон 105 выровнен относительно сейсмического источника, используемого при выполнении сейсмической съемки. Если выравнивание датчикового устройства относительно сейсмического источника, используемого при выполнении сейсмической съемки, неизвестно или может изменяться, датчиковое устройство 500 является более подходящим.
Со ссылкой на фигуру 11 будет описано десятое воплощенное датчиковое устройство 770. Датчиковое устройство 770 является таким же, как датчиковое устройство 100, описанное выше со ссылкой на фигуру 1, но в состав не включен y-компонентный геофон 105. Должно быть понятно, что датчиковые устройства 760 и 770 являются одинаковыми, за исключением того, что стрелка 111 находится в иной ориентации относительно горизонтального геофона 104 или 105 соответственно.
Теперь со ссылкой на фигуру 12 будет описано одиннадцатое воплощенное датчиковое устройство 780. Датчиковое устройство 780 является таким же, как датчиковое устройство 500, описанное выше со ссылкой на фигуру 6, но в состав не включен x-компонентный геофон 104.
Следует понимать, что приведенные выше варианты осуществления не являются исчерпывающими и что другие сочетания геофонных и гидрофонных датчиков являются частью изобретения в объеме прилагаемой формулы изобретения.
Теперь будут описаны воплощенные установки датчиковых устройств. Имеются несколько альтернативных вариантов установки датчиковых устройств на границе раздела земля-воздух.
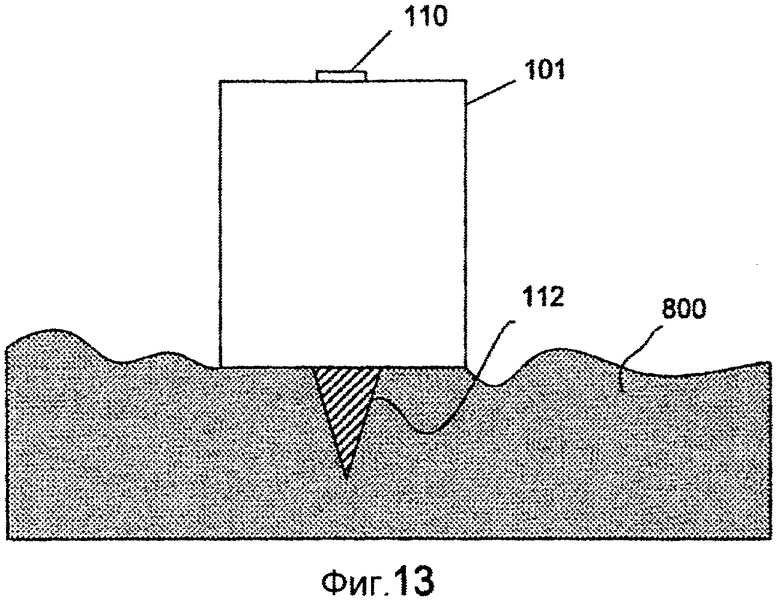
Первая установка датчикового устройства показана на фигуре 13. В данном случае корпус 101 любого одного из датчиковых устройств, описанных выше, помещают поверх поверхности земли 800. Связывающее устройство 112 заглубляют в землю. Этим обеспечивают механическую связь между землей 800 и корпусом 101, который по текучей среде связан с компоновкой (компоновками) датчиков, включенными в состав датчикового устройства. Уровень 110 и стрелка (не видимые на фигуре) позволяют пользователю устанавливать датчиковое устройство в надлежащей ориентации. Датчиковое устройство можно устанавливать временно или навсегда.
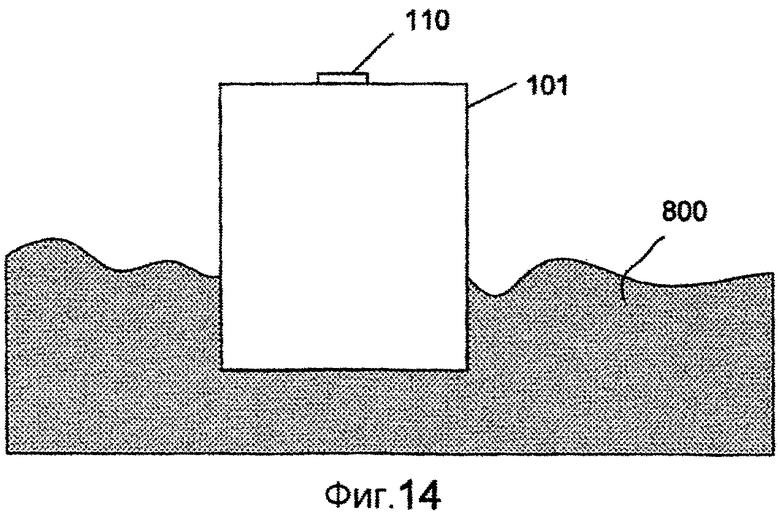
Вторая установка показана на фигуре 14. В данном случае корпус 101 любого одного из датчиковых устройств, описанных выше, частично заглубляют в поверхность земли 800. Связывающее устройство отсутствует. Земля, частично окружающая корпус 101, обеспечивает достаточную механическую связь между землей 800 и корпусом 101, который по текучей среде связан с компоновкой (компоновками) датчиков, включенными в состав датчикового устройства, так что связывающее устройство не требуется. Уровень 110 и стрелка (не видимые на фигуре) позволяют пользователю устанавливать датчиковое устройство в надлежащей ориентации. Датчиковое устройство можно устанавливать временно или навсегда.
Третья установка показана на фигуре 15. В данном случае корпус 101 любого одного из датчиковых устройств, описанных выше, располагают ниже поверхности земли 800 на дне буровой скважины 900. Связывающее устройство отсутствует. Стенки буровой скважины 900, окружающие корпус 101, обеспечивают достаточную механическую связь между землей 800 и корпусом 101, который по текучей среде связан с компоновкой (компоновками) датчиков, включенных в состав датчикового устройства, так что связывающее устройство не требуется. Уровень 110 и стрелка (не видимые на фигуре) позволяют пользователю устанавливать датчиковое устройство в надлежащей ориентации. Как вариант, если известно, что буровая скважина 900 находится в правильной ориентации (обычно вертикальной), то уровень 110 может быть исключен. Эта установка требует хорошее соответствие между буровой скважиной 900 и корпусом 101. Буровая скважина может быть относительно мелкой, глубиной несколько метров или меньше, например глубиной около 1 м. Датчиковое устройство можно устанавливать временно или навсегда.
Четвертая установка показана на фигуре 16. В данном случае корпус 101 любого одного из датчиковых устройств, описанных выше, располагают ниже поверхности земли 800 на дне глубокой буровой скважины 1000. Буровая скважина может быть глубиной много метров или много сотен метров. Она может быть пробурена с некоторой целью, а не специально для помещения датчикового устройства. Связывающее устройство 112 заглубляют в землю 800 на дне буровой скважины 1000. Уровень 110 и стрелка (на видимые на фигуре) позволяют пользователю устанавливать датчиковое устройство в надлежащей ориентации. Если установка пользователем не выполняется (что обычно бывает в случае глубоких узких буровых скважин), уровень 110 может быть исключен. Датчиковое устройство можно устанавливать временно или навсегда. Эта установка больше подходит для постоянной установки датчикового устройства.
Фигура 17а иллюстрирует обычную расстановку датчиковых устройств предшествующего уровня техники. Расстановка 1100 включает в себя многочисленные датчиковые устройства с геофонами вертикального типа, обозначенные Z. Датчиковые устройства Z расположены в одномерной группе. Каждое датчиковое устройство Z отделено от соседних датчиковых устройств на расстояние d. Обычно датчиковые устройства соединяют с центром получения данных.
Теперь будут описаны с первого по третий варианты осуществления расстановок датчиковых устройств со ссылкой на фигуру с 17b по 17d соответственно.
Первая воплощенная расстановка 1101 является такой же, как обычная расстановка 1100, за исключением того, что датчиковые устройства Р являются датчиковыми устройствами 300, описанными выше со ссылкой на фигуру 4. Эти датчиковые устройства Р измеряют только давление, то есть они не измеряют скорости. Как пояснялось выше, при съемке, выполняемой с использованием этой расстановки, после обработки получают качество данных, сравнимое с качеством для расстановки 1100, но без регистрации волн сдвига.
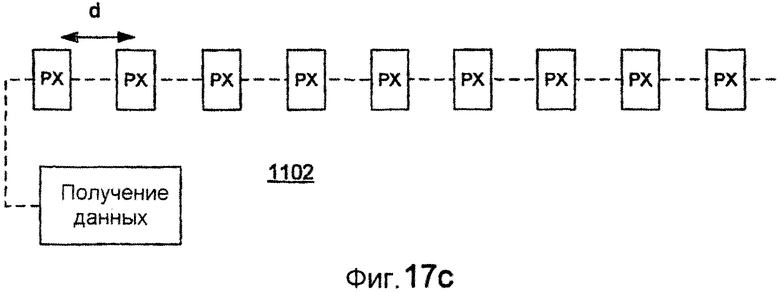
Вторая воплощенная расстановка 1102 является такой же, как обычная расстановка 1100, за исключением того, что датчиковые устройства РХ являются датчиковыми устройствами 300, описанными выше со ссылкой на фигуру 9. Разнесение d датчиков является таким же, как в расстановках 1100 и 1101. После обработки качество данных, получаемых при съемке, выполняемой с использованием второй воплощенной расстановки 1102, выше качества данных, получаемых при съемке, выполняемой с использованием обычной расстановки 1100. Оно также выше качества данных, получаемых при съемке, выполняемой с использованием первой воплощенной расстановки 1101.
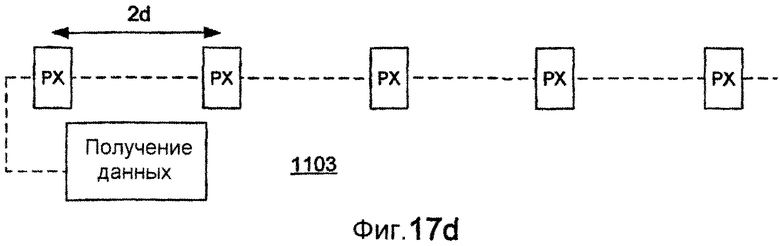
Третья воплощенная расстановка 1103 является такой же, как вторая воплощенная расстановка 1102, за исключением того, что в третьей расстановке 1103 датчиковые устройства РХ отделены расстоянием 2d, которое в два раза больше расстояния d отделения во второй воплощенной расстановке 1102. При съемке, выполняемой с использованием третьей воплощенной расстановки 1103, обеспечиваются данные, имеющие качество, аналогичное качеству, обеспечиваемому обычной расстановкой 1100.
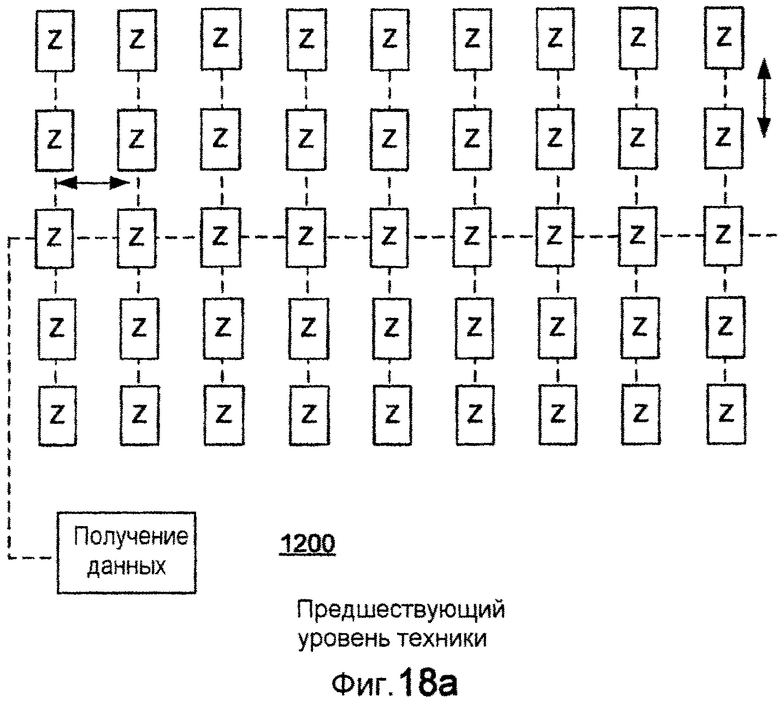
На фигуре 18а показана обычная расстановка 1200, включающая в себя двумерную группу датчиковых устройств. В данном случае датчиковые устройства Z с геофонами вертикального типа показаны в сеточной группе с одинаковым разнесением d между соседними датчиковыми устройствами Z в обоих измерениях.
На фигуре 18b показана первая воплощенная расстановка 1201, включающая в себя двумерную группу датчиковых устройств. В данном случае многочисленные датчиковые устройства PXY показаны в сеточной группе. Датчиковые устройства PXY являются датчиковыми устройствами 500, описанными выше со ссылкой на фигуру 6. Датчиковые устройства PXY в обоих измерениях имеют одинаковое разнесение 2d между соседними датчиковыми устройствами PXY. Разнесение 2d в два раза больше разнесения между датчиковыми устройствами Z в расстановке 1200. Поэтому количество датчиковых устройств уменьшается приблизительно в 4 раза вместе с соответствующим сокращением количества базовых станций, потребления электроэнергии и т.д., хотя небольшой размер иллюстративной расстановки, показанной на фигуре, приводит к меньшему сокращению.
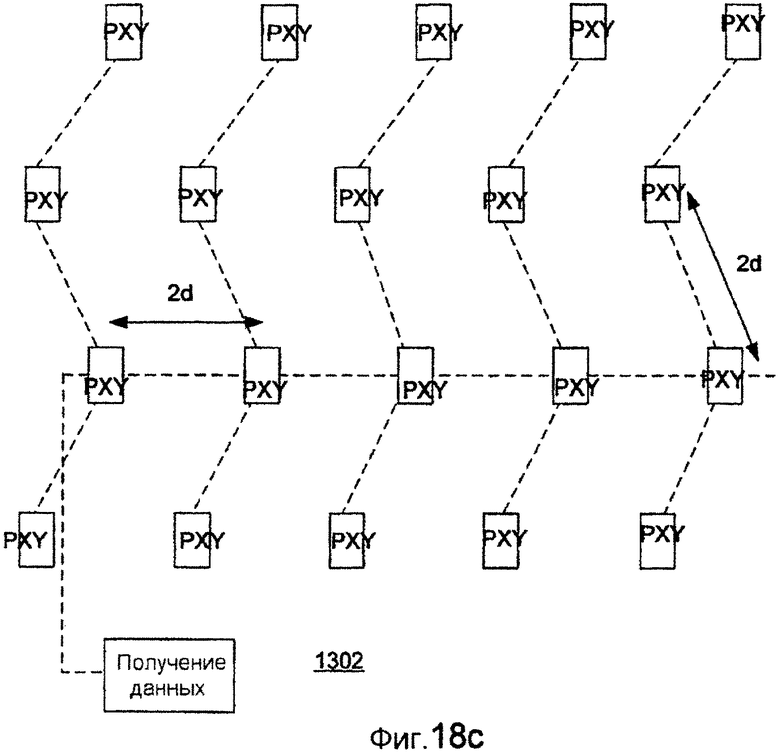
На фигуре 18с показана вторая воплощенная расстановка 1202, включающая в себя двумерную группу датчиковых устройств. В данном случае, многочисленные датчиковые устройства PXY показаны в шестиугольной группе. Ее называют шестиугольной группой, поскольку смещение соседних линий датчиковых устройств приводит к каждому датчиковому устройству PXY, находящемуся на одинаковом расстоянии от шести соседних датчиковых устройств PXY. Датчиковые устройства PXY являются датчиковыми устройствами 500, описанными выше со ссылкой на фигуру 6. Датчиковые устройства PXY имеют одинаковое разнесение 2d между каждым из шести соседних датчиковых устройств PXY. Поэтому количество датчиковых устройств уменьшается приблизительно в 4 раза по сравнению с расстановкой из фигуры 18а при соответствующем сокращении количества базовых станций, потребления электроэнергии и т.д., хотя небольшой размер иллюстративной расстановки, показанной на фигуре, приводит к меньшему сокращению.
Расстановки 1201 и 1202 особенно целесообразно применять в районах, где препятствия могут мешать размещению приемных устройств. Преимущества возникают вследствие того, что расстояние между приемниками в два раза больше, чем при обычной съемке, так что к крупным препятствиям можно приспособиться без нарушения геометрии размещения датчиковых устройств. Это применимо к регулярным геометриям и нерегулярным геометриям приемников, которые могут быть необходимы при наличии препятствий.
Как будет теперь описано со ссылкой на фигуру 18d, датчиковые устройства, описанные выше, можно использовать в сочетании с обычными датчиковыми устройствами.
Ссылаясь на фигуру 18d, третья воплощенная расстановка 1203 почти полностью основана на обычной расстановке 1200 и включает в себя некоторое количество обычных (то есть без заполненного текучей средой корпуса) датчиковых устройств Z с z-компонентными геофонами. Расстановка 1203 отличается тем, что препятствие в центре расстановки мешает размещению трех последовательных датчиковых устройств в горизонтальном направлении на фигуре. Датчиковые устройства вблизи препятствия не являются z-компонентными геофонными датчиками Z, а могут быть датчиковыми устройствами, воплощенными выше. В частности, устройства с тремя датчиками вблизи препятствия, непосредственно над и непосредственно под препятствием, показанные на фигуре как ZPY, являются устройствами 780 с датчиком давления и z- и y-компонентными датчиками, описанными выше со ссылкой на фигуру 11. Кроме того, как показано на фигуре, датчиковые устройства, непосредственно прилегающие к сторонам препятствия, являются устройствами с датчиком давления и z- и x-компонентными датчиками, показанными на фигуре как ZPX. Эти датчиковые устройства ZPX являются такими же, как датчиковые устройства 760, описанные выше со ссылкой на фигуру 10.
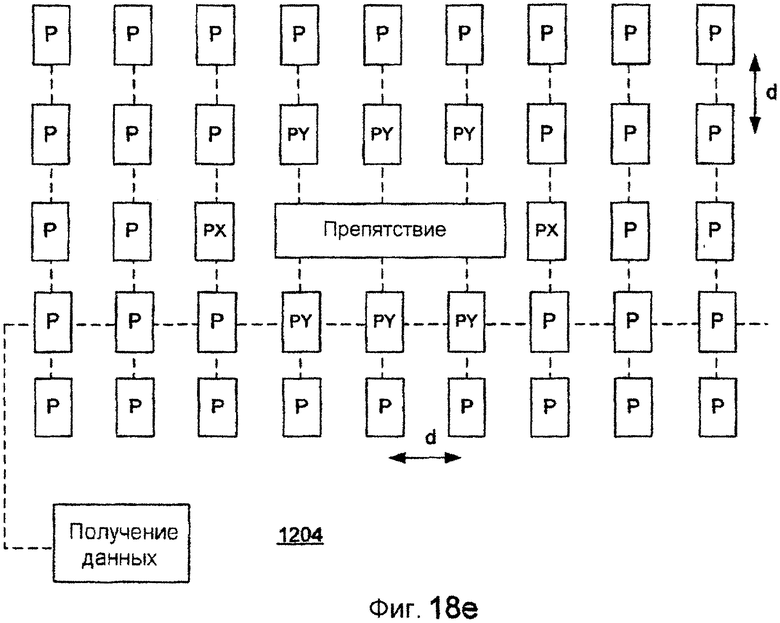
Как теперь будет описано со ссылкой на фигуру 18е, в расстановке могут вместе использоваться различные типы воплощенных датчиковых устройств.
Ссылаясь на фигуру 18е, четвертая воплощенная расстановка 1204 в некотором отношении аналогична третей воплощенной расстановке 1203. Однако вместо датчиковых устройств Z с z-компонентными геофонами использованы датчиковые устройства 300, показанные как Р и описанные выше со ссылкой на фигуру 4. Разнесение датчиковых устройств Р является таким же, как разнесение датчиковых устройств Z в расстановке 1203. В центре расстановки не допускается размещение трех последовательных датчиковых устройств в горизонтальном направлении на фигуре. Датчиковыми устройствами вблизи препятствия не являются датчиковые P-устройства 300. Вместо них три датчиковых устройства вблизи препятствия, непосредственно над и непосредственно под препятствием являются устройствами 780 с датчиком давления и y-компонентным датчиком, показанные на фигуре как PY и описанные выше со ссылкой на фигуру 12. Кроме того, как показано на фигуре, датчиковые устройства, непосредственно прилегающие к сторонам препятствия, являются устройствами с датчиком давления и x-компонентным датчиком, показанными на фигуре как РХ. Эти датчиковые устройства РХ являются датчиковыми устройствами 750, описанными выше со ссылкой на фигуру 9.
В расстановках 1203, 1204 использование воплощенных датчиковых устройств вблизи препятствия смягчает последствия потери данных с датчиковых устройств, которые в иных обстоятельствах размещают на месте нахождения препятствия. В частности, гидрофон и датчики вдоль линии наблюдения в датчиковых устройствах ZPY и ZPX в третьей воплощенной расстановке 1203 используют при обработке данных для интерполяции волнового поля вблизи препятствия. Датчики вдоль линии наблюдения в датчиковых устройствах PY и РХ в четвертой воплощенной расстановке 1204 используют при обработке данных для интерполяции волнового поля вблизи препятствия. В обоих случаях качество данных, получающихся при съемках, лучше, чем качество данных, наблюдаемое без использования разных датчиков. В данном случае термин «вдоль линии наблюдения» обозначает ориентацию датчиковых устройств относительно сейсмического источника, используемого при съемке, при этом геофоны вдоль линии наблюдения воспринимают скорость в направлении на источник, а не поперек направления на источник.
Должно быть понятно, что в описанных выше датчиковых устройствах вместо геофонов можно использовать акселерометры. В случае использования акселерометров сопряжение с программным обеспечением выходных сигналов датчиков является обычно всем, что необходимо для получения данных о скорости, обеспечиваемых геофонами. Акселерометры MEMS пригодны для использования в описанных выше вариантах осуществления. Если с геофонов требуется информация об ускорении, ее можно получать, дифференцируя выходные сигналы геофонов в программном обеспечении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМИЧЕСКАЯ РАЗВЕДКА | 2006 |
|
RU2396578C2 |
| ПОНИЖЕНИЕ УРОВНЯ ШУМА С ИСПОЛЬЗОВАНИЕМ ДАННЫХ ВРАЩЕНИЯ | 2012 |
|
RU2562932C2 |
| Самовсплывающая портативная донная сейсмическая станция без оставления груза на дне моря | 2022 |
|
RU2796944C1 |
| ВЫЧИСЛЕНИЕ ДАННЫХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГРАДИЕНТА ДАННЫХ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2014 |
|
RU2733976C2 |
| ВЫЧИСЛЕНИЕ ДАННЫХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГРАДИЕНТА ДАННЫХ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2014 |
|
RU2605392C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| СПОСОБ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ ДЛЯ ПОДАВЛЕНИЯ МНОГОКРАТНЫХ ПЕРЕОТРАЖЕНИЙ | 1994 |
|
RU2116657C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2457514C1 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК АКУСТИЧЕСКИХ ВОЛН И СПОСОБЫ | 2011 |
|
RU2562711C2 |















Группа изобретений относится к датчиковым устройствам, используемым во время съемки сейсмических данных. Заявленная группа изобретений включает сейсмическую датчиковую установку, содержащую многочисленные датчиковые устройства, устанавливаемые на границе земля-воздух. При этом датчиковое устройство содержит заполненный текучей средой корпус, твердотельное связывающее устройство, расположенное на нижней части корпуса, гидрофон и один или более геофонов или акселерометров, поддерживаемых в корпусе и непосредственно связанных с текучей средой с тем, чтобы обнаруживать перемещение текучей среды и изменения давления в текучей среде, производимые волнами сжатия, проходящими через текучую среду, и не подвергаться при этом воздействию волн сдвига. Технический результат, достигаемый от реализации заявленной группы изобретений, заключается в возможности заявленных датчиковых устройств удалять эффекты поверхностной волны на месте расположения датчика, исключая необходимость удаления эффектов обработкой данных, также в возможности получения заданного качества данных при значительно меньшем количестве датчиковых устройств, благодаря тому, что компоновка датчиков не подвержена действию волн сдвига. При этом посредством действия компоновки развязки обеспечивается демпфирование перемещения корпуса 101 на частотах сейсмического диапазона частот от 1 Гц до 200 Гц. 3 н. и 27 з.п. ф-лы, 28 ил.
1. Датчиковое устройство, выполненное с возможностью установки на границе раздела земля-воздух, при этом датчиковое устройство содержит:
заполненный текучей средой корпус;
твердотельное связывающее устройство, расположенное на нижней части корпуса; и
компоновку датчиков, содержащую по меньшей мере один гидрофон, поддерживаемый в корпусе и непосредственно связанный с текучей средой, причем гидрофон выполнен с возможностью измерять изменения давления в текучей среде и не подвергаться при этом воздействию волн сдвига.
2. Датчиковое устройство по п.1, при этом датчиковое устройство выполнено с возможностью установки на границе раздела земля-воздух посредством содержания уровня, ориентированного совместно с датчиком упомянутой компоновки датчиков.
3. Датчиковое устройство по п.1, в котором компоновка датчиков не содержит геофонов и акселерометров.
4. Датчиковое устройство по п.1, в котором компоновка датчиков содержит три гидрофона, размещенных по существу горизонтально и в различных ориентациях друг к другу.
5. Датчиковое устройство по п.1, в котором компоновка датчиков содержит один или более геофонов или акселерометров.
6. Датчиковое устройство по п.1, в котором компоновка датчиков содержит два или более геофонов или акселерометров.
7. Датчиковое устройство по п.5 или 6, в котором компоновка датчиков содержит два геофона или акселерометра, размещенных по существу горизонтально и в различных ориентациях друг к другу.
8. Датчиковое устройство по п.7, в котором компоновка датчиков включает в себя вертикально выровненный геофон или акселерометр и горизонтально выровненный геофон или акселерометр.
9. Датчиковое устройство по п.7, в котором компоновка датчиков включает в себя два горизонтально выровненных геофона или акселерометра, выровненных ортогонально друг другу.
10. Датчиковое устройство по п.1, содержащее компоновку механической развязки для механической развязки одного или более датчиков компоновки датчиков от корпуса.
11. Датчиковое устройство по п.10, в котором компоновка механической развязки содержит пружину и компоновку амортизаторов.
12. Сейсмическая датчиковая установка, содержащая датчиковое устройство, устанавливаемое на границе земля-воздух, при этом датчиковое устройство содержит:
заполненный текучей средой корпус;
твердотельное связывающее устройство, расположенное на нижней части корпуса; и
компоновку датчиков, содержащую по меньшей мере один гидрофон, поддерживаемый в корпусе и непосредственно связанный с текучей средой так, чтобы обнаруживать изменения давления в текучей среде и не подвергаться при этом воздействию волн сдвига.
13. Установка по п.12, в которой датчиковое устройство устанавливается поверх поверхности земли на границе земля-воздух.
14. Установка по п.12, в которой датчиковое устройство частично заглубляется в поверхность земли на границе земля-воздух.
15. Установка по п.12, в которой датчиковое устройство предусматривается в буровой скважине.
16. Установка по п.12, содержащая уровень, ориентируемый совместно с датчиком компоновки датчиков.
17. Установка по п.12, в которой компоновка датчиков не содержит геофонов и акселерометров.
18. Установка по п.12, в которой компоновка датчиков содержит три гидрофона, размещенных по существу горизонтально и в различных ориентациях друг к другу.
19. Установка по п.12, в которой компоновка датчиков содержит один или более геофонов или акселерометров.
20. Установка по п.12, в которой компоновка датчиков содержит два или более геофонов или акселерометров.
21. Установка по п.19 или 20, в которой компоновка датчиков содержит два геофона или акселерометра, размещенных по существу горизонтально и в различных ориентациях друг к другу.
22. Установка по п.21, в которой компоновка датчиков включает в себя вертикально выровненный геофон или акселерометр и горизонтально выровненный геофон или акселерометр.
23. Установка по п.21, в которой компоновка датчиков включает в себя два горизонтально выровненных геофона или акселерометра, выровненных ортогонально друг другу.
24. Установка по п.12, содержащая компоновку механической развязки для механической развязки одного или более датчиков компоновки датчиков от корпуса.
25. Установка по п.24, в которой компоновка механической развязки содержит пружину и компоновку амортизаторов.
26. Установка по п.12, содержащая одномерную группу датчиковых устройств, устанавливаемых на границе земля-воздух.
27. Установка по п.12, содержащая двумерную группу датчиковых устройств, устанавливаемых на границе земля-воздух.
28. Сейсмическая датчиковая установка, содержащая многочисленные датчиковые устройства, устанавливаемые на границе земля-воздух, при этом установка содержит многочисленные датчиковые устройства, расположенные рядом с препятствием, многочисленные датчиковые устройства, содержат:
заполненный текучей средой корпус;
твердотельное связывающее устройство, расположенное на нижней части корпуса; и
гидрофон и один или более геофонов или акселерометров, поддерживаемых в корпусе и непосредственно связанных с текучей средой с тем, чтобы обнаруживать перемещение текучей среды и изменения давления в текучей среде, производимые волнами сжатия, проходящими через текучую среду, и при этом не подвергаться воздействию волн сдвига.
29. Установка по п.28, в которой один или более датчиков механически развязаны от корпуса.
30. Установка по п.28, в которой волны сжатия содержат по меньшей мере одно из волн Релея и P-волн.
| US 5126980 A1 30.06.1992 | |||
| JP 57063424 A 16.04.1982 | |||
| СПОСОБ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ РАЗРАБОТКИ НЕСКОЛЬКИХ ЭКСПЛУАТАЦИОННЫХ ОБЪЕКТОВ И СКВАЖИННАЯ УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2211311C2 |

