Настоящее изобретение относится к хирургической соединительной системе, включающей в себя первое хирургическое соединительное приспособление и второе хирургическое соединительное приспособление соответственно по меньшей мере с двумя выполненными с возможностью механического введения в зацепление друг с другом электрическими соединительными контактами, причем первое и второе соединительное приспособление в разобщенном положении полностью отделены друг от друга, а в механически соединенном положении находятся в механическом зацеплении друг с другом.
Кроме того, настоящее изобретение относится к хирургической системе привода, включающей в себя по меньшей мере один хирургический наконечник с приводом в форме электродвигателя и по меньшей мере одну линию электроснабжения, которая имеет первый, выполненный с возможностью разобщаемого соединения по меньшей мере с одним наконечником конец и второй, соединенный или выполненный с возможностью разобщаемого соединения с устройством управления и/или регулирования для управления и/или регулирования электродвигателем конец.
Хирургическая соединительная система, а также хирургическая система привода вышеописанного типа известны, например, из DE 102 25 857 A1. Хирургические наконечники с интегрированным приводом в форме электродвигателя, далее также называемые хирургическими моторными наконечниками, в случае известной системы привода электрически соединены с линией электроснабжения при помощи штекерного соединения, которое также может быть обозначено как присоединительный кабель. Штекерное соединение осуществляется в стерильной области, чтобы была возможность смены наконечников также в ходе операции. Это означает, что штекерное соединение после каждого применения расширяется, то есть его необходимо очищать и стерилизовать. Прежде всего штекерные соединения при этом проходят процесс стерилизации горячим паром.
Известно, что для активации наконечников предусматривают исполнительные элементы, например ручной выключатель на одном из двух соединительных устройств соединительной системы, например, на предусмотренном на присоединительном кабеле соединительном устройстве, или ножной выключатель. Если дополнительно задано еще одно требование, что тип наконечника должен автоматически считываться устройством управления и/или регулирования системы привода, которое далее также обозначается как управление двигателем, то практически невозможно предусмотреть присоединительный кабель с таким количеством линий, какое количество витков обмотки имеет электродвигатель, то есть в случае электродвигателя, включающего в себя три витка обмотки двигателя, включающий в себя только три линии присоединительный кабель. Выполнение дополнительных управляющих и считывающих линий также означает, что соединительная система должна иметь соответственно большее количество присоединительных контактов. Так как наконечники снова подготавливаются после каждого применения, то в случае существующих на сегодня систем существует нежелательно высокая степень отказов по причине проблем с электрическими контактами. Это не в последнюю очередь потому, что также на данный момент находящиеся в применении коммутационные элементы для активации цепи тока электродвигателя подвержены воздействию коррозии.
Поэтому задачей настоящего изобретения является усовершенствование хирургических систем соединения, а также хирургических систем привода вышеописанного типа, чтобы они стали проще и надежнее в обращении.
Данная задача в случае хирургической соединительной системы первоначально описанного типа согласно изобретению решена за счет того, что она включает в себя электрическое коммутационное устройство выключения, которое в соединенном положении может быть переведено из положения, в котором по меньшей мере один первый электрический соединительный контакт первого соединительного устройства не находится в зацеплении по меньшей мере с одним первым электрическим соединительным контактом второго соединительного устройства, в положение включения, в котором по меньшей мере один первый электрический соединительный контакт первого соединительного устройства и по меньшей мере один первый электрический соединительный контакт второго соединительного устройства находятся в проводящем электричество контакте или зацеплении, или наоборот - из положения включения в положение выключения.
При помощи предложенным образом усовершенствованной хирургической соединительной системы, прежде всего, возможно использовать взаимодействующие соединительные устройства в качестве коммутационного устройства. Иными словами, таким образом, например, штекерное соединение между линией электроснабжения и наконечником одновременно может быть использовано в качестве коммутационного устройства, которое позволяет обслуживающему лицу, например, при необходимости активировать электродвигатель наконечника и также снова его деактивировать. Таким образом, соединительная система в целом может осуществлять двойную функцию. С одной стороны, между наконечником и, например, линией электроснабжения можно создать механическое соединение. С другой стороны, оно также может быть использовано в качестве коммутационного устройства, чтобы, например, при необходимости можно было подать напряжение на обмотку электродвигателя наконечника. За счет этой формы осуществления можно выполнить, прежде всего, линию электроснабжения с таким количеством соединительных линий, какое количество витков обмотки двигателя включает в себя электродвигатель. Таким образом, количество требуемых электрических контактных элементов минимизируется, прежде всего, до количества витков обмотки электродвигателя. От прочих линий, например, для приведения в действие электродвигателя у традиционных систем привода и при необходимости от распознавания их типа или конструкции можно отказаться.
Оптимально, если первое и второе соединительное устройство включают в себя соответственно по меньшей мере один второй электрический соединительный контакт и если вторые соединительные контакты в положении выключения и в положении включения находятся друг с другом в проводящем электричество контакте или зацеплении. Другими словами, можно, например, через находящиеся уже в выключенном положении в проводящем электричество контакте или в зацеплении вторые соединительные контакты до активации, то есть, прежде всего, до подачи напряжения электродвигателя осуществить распознавание специальных электрических параметров наконечника. Например, в положении выключения может быть выполнено измерение сопротивления, по которому может надежным и однозначным образом быть определен тип наконечника. Предпочтительным образом, для этого предусмотрены соответственно два вторых электрических соединительных контакта, причем два вторых электрических соединительных контакта наконечника соединены друг с другом с проведением электричества по меньшей мере через один виток обмотки двигателя.
Особо предпочтительным является вариант, когда одно из двух соединительных устройств включает в себя по меньшей мере один первый соединительный элемент, когда другое из двух соединительных устройств включает в себя по меньшей мере один второй соединительный элемент, который выполнен соответствующим по меньшей мере одному первому соединительному элементу, и когда по меньшей мере один первый и по меньшей мере один второй соединительные элементы в соединенном положении находятся в зацеплении друг с другом. За счет по меньшей мере одного первого и одного второго соединительных элементов, например, может быть легко реализовано механическое соединение обоих соединительных устройств, а именно, прежде всего, независимо от коммутационного состояния коммутационного устройства. Иными словами, соединительные устройства могут занимать положение соединения и в нем по выбору занимать выключенное или включенное положение. Таким образом, оба соединительных устройства образуют один узел, а именно, как в положении включения, так и в положении выключения.
Особо простой является конструкция соединительной системы, когда первый соединительный элемент выполнен в форме соединительной втулки и когда второй соединительный элемент выполнен в форме выполненной с возможностью введения в соединительную втулку соединительной цапфы. Соединительная втулка может быть предусмотрена либо на первом соединительном устройстве, либо на втором соединительном устройстве. Также возможно, чтобы сама соединительная цапфа была снабжена выемкой, в которую затем может входить в зацепление еще одна, расположенная внутри соединительной втулки соединительная цапфа. Таким образом, может быть достигнуто стабильное механическое соединение между обоими соединительными устройствами.
Согласно еще одной предпочтительной форме осуществления изобретения может быть предусмотрено, чтобы соединительная система включала в себя фиксатор коммутационного положения для механической фиксации коммутационного устройства в положении включения и положении выключения. Если оба соединительных устройства соединены друг с другом, то при помощи фиксатора коммутационного положения, прежде всего, можно обеспечить, что коммутационное устройство не будет без затруднений переведено из положения включения в положение выключения и наоборот. Например, коммутационное устройство может быть заблокировано механически как в положении включения, так и в положении выключения. Таким образом, при соответствующей форме осуществления, например, можно предотвратить то, чтобы оба соединительных устройства при соединении занимали положение включения, за счет чего двигатель неконтролируемым образом может быть подано напряжение. Иными словами, соединительные устройства могут при помощи фиксатора коммутационного положения предпочтительным образом сначала занимать в соединенном положении только положение выключения. Из положения выключения коммутационное устройство затем снова должно быть переведено оператором в положение включения.
Оптимально, если фиксатор коммутационного устройства включает в себя блокирующее устройство для механической блокировки занимающих соединенное положение первого и второго соединительных устройств в положении включения и в положении выключения, а также разобщающее устройство для разобщения блокирующего устройства. Прежде всего, блокирующее устройство может быть выполнено для автоматической механической блокировки обоих соединительных устройств как в положении включения, так и в положении выключения. Если, например, оба отделенные друг от друга соединительные устройства входят в зацепление друг с другом, то это дает блокирующему устройству возможность, прежде всего, заблокировать сначала оба соединительных устройства в положении выключения. При помощи разобщительного устройства, в таком случае, тогда, например, блокирующее устройство может быть разобщено механически за счет соответствующего приведения в действие разобщительного устройства, чтобы перевести коммутационное устройство из положения выключения в положение включения. Блокирующее устройство, предпочтительным образом, также автоматически блокирует соединительные устройства в положении включения механическим образом друг по отношению к другу, так что возвращение коммутационного устройства из положения включения в положение выключения возможно только в результате целенаправленной активации разобщающего устройства, которое затем механическим образом разобщает блокирующее устройство, чтобы перевести соединительные устройства друг относительно друга снова в положение выключения.
Чтобы при необходимости снова разобщить соединительные устройства друг с другом, снова необходимо привести в действие разобщающее устройство из положения выключения, чтобы разобщить блокирующее устройство. Таким образом, достигается высокая надежность эксплуатации и целенаправленное переключение, то есть перевод коммутационного устройства из положения включения в положение выключения и наоборот.
Преимущественным является случай, когда блокирующее устройство включает в себя первый и второй блокирующие элементы, а также третий блокирующий элемент, если первые и вторые блокирующие элементы расположены или выполнены на одном из двух соединительных устройств, если третий блокирующий элемент расположен или выполнен на другом из двух соединительных устройств, и если первый и третий блокирующие элементы входят в зацепление в положении включения и если второй и третий блокирующие элементы находятся в зацеплении в положении выключения. Снабжение блокирующего устройства по меньшей мере тремя названными блокирующими устройствами делает легко возможным блокировку соединительных устройств по меньшей мере в двух отличных друг от друга положениях, а именно, например, в положении включения и в положении выключения.
Особо просто для изготовления блокирующее устройство, если первый и второй блокирующие элементы выполнены в форме первой и второй блокирующих выемок и если третий блокирующий элемент выполнен в форме выполненного с возможностью вхождения в зацепление с первой и со второй блокирующими выемками блокирующего выступа. Например, блокирующий выступ может по выбору входить в зацепление в первую или во вторую блокирующую выемку, чтобы таким образом заблокировать или же зафиксировать соединительные устройства друг относительно друга, например, в положении включения и в положении выключения. Разумеется, также возможно выполнить первый и второй блокирующие элементы в форме блокирующих выступов и предусмотреть по меньшей мере третий блокирующий элемент в форме блокирующей выемки.
Чтобы дополнительно упростить конструкцию соединительной системы, оптимально, если первая и вторая блокирующие выемки выполнены в форме расположенных аксиально на расстоянии друг от друга кольцевых пазов и если блокирующий выступ выполнен в форме установленной с возможностью перемещения в радиальном направлении цапфы. Например, кольцевые пазы могут быть выполнены на соединительной втулке или на соединительной цапфе, и расположенная с возможностью перемещения по направлению к продольной оси или от продольной оси цапфа может быть расположена и зафиксирована в направлении на одном из обоих соединительных устройств, чтобы она по выбору заходила в зацепление в кольцевые пазы или разобщала их. Особо компактно может быть выполнена соединительная система, если блокирующие выемки открыты по направлению к продольной оси соединительной втулки. Например, таким образом, блокирующий выступ в форме соединительной цапфы может быть расположен с возможностью перемещения в радиальном направлении, чтобы в положении включения и положении выключения, соответственно, входить в зацепление в одну из двух блокирующих выемок. Преимущественным является вариант, когда блокирующее устройство включает в себя устройство предварительного натяжения для фиксации блокирующих элементов в положении включения или же в положении выключения. При помощи устройства предварительного натяжения, прежде всего, можно обеспечить, чтобы находящиеся в зацеплении друг с другом в положении включения или же в положении выключения блокирующие элементы могли быть выведены из зацепления только путем преодоления воздействия устройства предварительного натяжения. Кроме того, устройство предварительного натяжения может произвольным образом также обеспечивать возможность, чтобы при введении в зацепление соединительных устройств блокирующие элементы автоматически входили в зацепление друг с другом, если соединительные устройства расположены друг относительно друга таким образом, чтобы они могли занимать положение включения или же положение выключения.
Оптимально, если блокирующие элементы выполнены с возможностью выведения из зацепления только против оказываемого устройством предварительного натяжения усилия предварительного натяжения. За счет этого оба соединенные друг с другом соединительные устройства могут быть переведены из положения включения или положения выключения в другое положение только целенаправленно за счет приведения в действие разобщающего устройства и путем преодоления воздействия устройства предварительного натяжения.
Предпочтительным образом, первый и третий блокирующие элементы, а также второй и третий блокирующие элементы расположены или выполнены с возможностью введения в зацепление и выведения из него друг относительно друга в радиальном направлении относительно продольной оси соединительной системы. Если оба соединительных устройства могут, например, перемещаться в направлении продольной оси соединительной системы по отношению друг к другу и входить в зацепление друг с другом, то блокировка, например, может осуществляться для их разобщения друг с другом только вследствие приведения в действие в направлении поперек продольной оси, прежде всего, в радиальном направлении. Таким образом, может быть повышена, прежде всего, надежность эксплуатации соединительной системы.
Преимущественным является вариант, когда разобщающее устройство выполнено для выведения из зацепления первого и третьего соединительных элементов из положения включения в коммутационное положение, в котором соединительные устройства являются перемещаемыми друг относительно друга в радиальном направлении. Этот вариант выполнения делает возможным переведение заблокированного от относительного перемещения в положении включения соединительного устройства за счет приведения в действие разобщающего устройства в коммутационное положение, в котором они являются перемещаемыми друг относительно друга в аксиальном направлении, например в направлении определенной соединительной системой продольной оси.
Кроме того, может быть преимущественным, если разобщающее устройство выполнено для выведения второго и третьего блокирующих элементов из зацепления из положения выключения в коммутационное положение. Прежде всего, таким образом за счет приведения в действие разобщающего устройства оба соединительных устройства могут быть переведены из положения выключения в коммутационное положение, предпочтительным образом за счет перемещения в аксиальном направлении друг относительно друга. Это делает возможным, например, отделение соединительных устройств, исходя из положения выключения, друг от друга или перемещение в положение включения.
Удобство обращения с соединительной системой для оператора может быть улучшено, прежде всего, за счет того, что разобщающее устройство включает в себя установленный с возможностью перемещения разобщающий элемент, который из неактивного положения является перемещаемым в активное положение и/или наоборот. Прежде всего, разобщающий элемент может служить для того, чтобы вывести из зацепления находящиеся в зацеплении в положении включения или же выключения блокирующие элементы.
Оптимально, если разобщающий элемент выполнен с возможностью прямого или опосредованного вхождения в зацепление или в контакт с третьим блокирующим элементом для перевода блокирующего устройства из положения включения или из положения выключения в коммутационное положение. Таким образом, например, путем простой активации разобщающего элемента и его перевода из неактивного положения в активное положение во взаимодействии с третьим блокирующим элементом блокирующее устройство из положения включения или из положения выключения, соответственно, переводится в коммутационное положение, в котором возможно, прежде всего, переключение коммутационного устройства из положения выключения в положение включения или наоборот.
Особо компактным образом хирургическая соединительная система может быть выполнена, если третий блокирующий элемент расположен или установлен на фиксирующем элементе и если разобщающий элемент выполнен с возможностью прямого или опосредованного вхождения в зацепление или в контакт с фиксирующим элементом для перевода блокирующего устройства из положения включения или из положения выключения в коммутационное положение. За счет простого взаимодействия разобщающего элемента с фиксирующим элементом, таким образом, например, может быть перемещен третий блокирующий элемент, чтобы вывести его из зацепления с первым или вторым блокирующим элементом.
Конструкция хирургической соединительной системы может быть легко дополнительно упрощена за счет того, что устройство предварительного натяжения включает в себя фиксирующий элемент. Например, фиксирующий элемент в форме пружинного элемента, предпочтительным образом, пластинчатой пружины, которая вследствие выхода из основного положения снова возвращается в основное положение самостоятельно без воздействия дополнительных внешних сил. Например, основное положение такого фиксирующего элемента может представлять собой такое положение, в котором третий блокирующий элемент находится в зацеплении с одним из двух других блокирующих элементов.
Согласно еще одной предпочтительной форме осуществления изобретения может быть предусмотрено, чтобы разобщающее устройство включало в себя по меньшей мере один механический управляющий элемент, который из положения захвата, в котором разобщающий элемент при помощи управляющего элемента может прямо или опосредовано входить в контакт или в зацепление с третьим блокирующим элементом для перевода блокирующего устройства из положения включения или из положения выключения в коммутационное положение, выполнен с возможностью приведения в разблокированное положение, в котором разобщающий элемент не является прямо или опосредовано вводимым в контакт или в зацепление с третьим блокирующим элементом для перевода блокирующего устройства из положения включения или из положения выключения в коммутационное положение. Управляющий элемент, таким образом, позволяет осуществлять простое механическое управление, чтобы при помощи разобщающего элемента перевести блокирующее устройство из положения включения или выключения в коммутационное положение или же не переводить его. За счет специальной формы осуществления управляющего элемента в разблокированном положении взаимодействие между разобщающим элементом и третьим фиксирующим элементом не возможно, чтобы перевести блокирующее устройство из положения включения или выключения в коммутационное положение. Управляющий элемент может использоваться, например, таким образом, чтобы при вхождении в зацепление соединительных устройств избежать прямого перехода из положения выключения. Иными словами, таким образом, может быть предотвращено перемещение соединительных устройств по направлению друг к другу до положения включения, например, при активном разобщающем элементе. Также, например, при переключении из положения включения в положение выключения, может быть наоборот предотвращено непреднамеренное разобщение соединительных устройств друг с другом.
Особо компактным образом может быть выполнена соединительная система, если управляющий элемент расположен или выполнен с возможностью перемещения на включающем в себя третий блокирующий элемент соединительном устройстве по направлению к продольной оси соединительной системы. Таким образом, управляющий элемент может пространственно находиться или же быть выполненным очень близко к третьему блокирующему элементу, что упрощает взаимодействие управляющего элемента и третьего блокирующего элемента.
Оптимально, если разобщающее устройство выполнено таким образом, что разобщающий элемент в активном положении переводит управляющий элемент из положения захвата в разблокированное положение для предотвращения того, что разобщающий элемент является прямо или опосредовано вводимым в зацепление или в контакт с третьим блокирующим элементом для перевода блокирующего устройства из положения включения или из положения выключения в коммутационное положение. Данная форма осуществления может предотвратить, прежде всего, ситуацию, что в том случае, когда разобщающий элемент занимает активное положение, он может входить в зацепление или в контакт с третьим блокирующим элементом, чтобы перевести блокирующее устройство в коммутационное положение. Как уже было описано, таким образом можно, прежде всего, избежать непреднамеренного перемещения как положения включения, так и положения выключения. Если, например, оба соединительных устройства введены в зацепление друг с другом и занимают коммутационное положение, то при находящемся длительное время в активном состоянии разобщающем элементе соединительную систем больше нельзя перевести в положение включения. Чтобы достичь этого, сначала разобщающий элемент должен быть переведен в неактивное положение, так чтобы управляющий элемент снова мог перейти из разблокированного положения в положение захвата, так чтобы заново осуществленное приведение в действие разобщающего элемента привело к выводу из зацепления третьего блокирующего элемента с одним из двух других блокирующих элементов. Таким образом, необходимо, чтобы оператор по меньшей мере ненадолго разблокировал разобщающий элемент, который, например, может быть расположен обращенным по направлению от продольной оси в радиальном направлении с предварительным эластичным напряжением, чтобы после достижения положения выключения или положения включения перевести коммутационное устройство в соответствующее другое положение или полностью разобщить оба соединительных устройства друг с другом.
Преимущественным является вариант, в котором разобщительное устройство выполнено таким образом, что управляющий элемент является переводимым из разблокированного положения в положение захвата только за счет перевода разобщающего элемента из активного положения в неактивное положение. Как уже было описано, за счет данной формы осуществления может быть, прежде всего, обеспечен тот факт, что при приведении соединительных устройств в зацепление последние предпочтительным образом сначала блокируются в положении выключения. Только за счет перевода разобщающего элемента из активного положения в неактивное положение управляющий элемент, своего рода, снова активируется таким образом, что вследствие еще подобного приведения в действие разобщающего элемента третий блокирующий элемент снова может быть выведен из зацепления с одним из двух других блокирующих элементов. Например, соединительная система затем может быть выполнена таким образом, что при активном разобщающем элементе соединительные устройства могут входить в зацепление друг с другом и блокирующее устройство, в таком случае автоматически блокирует или фиксирует соединительную систему в положении выключения. На следующем этапе после разблокирования разобщающего элемента управляющий элемент может быть переведен из разблокированного положения в положение захвата. После еще одного приведения в действие разобщающего элемента затем соединительная система может быть переведена из положения выключения в положение включения. В обратном порядке, таким образом, коммутационное устройство может быть переведено из положения включения в положение выключения и затем при необходимости коммутационное устройство - снова в положение включения и соединительная система - в разобщенное положение. Иными словами, при активном разобщающем элементе соединительная система может быть помещена, соответственно, только в следующее положение, таким образом, например, из разобщенного положения в положение выключения, или из положения выключения в положение включения, или из положения включения в положение включения, или из положения выключения в разобщенное положение. Прямое переведение соединительной системы, например, из разобщенного положения в положение включения или из положения включения в разобщенное положение, соответственно, минуя положение выключения, таким образом, не возможно.
Преимущественным является вариант, в котором разобщающее устройство выполнено таким образом, что разобщающий элемент только в положении захвата выполнен с возможностью прямого или опосредованного вхождения в зацепление или в контакт с третьим блокирующим элементом для перевода блокирующего устройства из положения включения или из положения выключения в коммутационное положение. За счет этого может быть, прежде всего, достигнуто, что разобщающий элемент, прежде всего, в разблокированном положении не может входить в зацепление или в контакт с третьим блокирующим элементом таким образом, чтобы блокирующее устройство могло быть переведено из положения включения или из положения выключения в коммутационное положение.
Преимущественным является вариант, в котором управляющий элемент включает в себя по меньшей мере один первый, соотнесенный с первым блокирующим элементом управляющий выступ и по меньшей мере один второй, соотнесенный со вторым блокирующим элементом управляющий выступ, которые выполнены с возможностью перемещения поперек направления перемещения разобщающего элемента для переведения управляющего элемента из положения захвата в разблокированное положение. Например, в том случае, если направление перемещения разобщающего элемента ориентировано поперек относительно продольной оси соединительной системы, чтобы перевести блокирующее устройство из положения включения или положения выключения в коммутационное положение, перемещение управляющих выступов может осуществляться поперек направления перемещения разобщающего элемента, то есть, прежде всего, в окружном направлении относительно продольной оси соединительной системы или горизонтально продольной оси. Например, разобщающий элемент в активном положении входит в контакт с управляющими выступами таким образом, что последние могут быть переведены из положения захвата в разблокированное положение при переходе из активированного положения. Это делает возможным, прежде всего, автоматическое переведение управляющего элемента из положения захвата в разблокированное положение с разобщающим элементом в активном положении при перемещении соединительных устройств по направлению друг к другу или друг от друга, чтобы, таким образом, предотвратить возможность вхождения разобщающего элемента зацепление или в контакт с третьим блокирующим элементом прямо или опосредовано, чтобы вывести находящиеся в зацеплении друг с другом блокирующие элементы из зацепления.
Оптимально, если предусмотрены два первых и/или два вторых управляющих выступов, которые в разблокированном положении имеют большее расстояние друг от друга, чем в положении захвата. Например, таким образом, может быть повышена функциональная надежность соединительной системы. Прежде всего, расстояние между управляющими выступами в разблокированном положении может быть настолько велико, чтобы разобщающий элемент мог беспрепятственно входить в зацепление между ними, и они не могли действовать как захваты при приведении в действие разобщающего элемента или его переведения из неактивного положения в активированное положение, чтобы вывести третий блокирующий элемент из зацепления с одним из двух других блокирующих элементов.
Преимущественным является вариант, когда первые управляющие выступы и/или вторые управляющие выступы отделены друг от друга шлицом, в который входит в зацепление разобщающий элемент в активном положении вследствие перемещения обоих соединительных устройств по направлению друг к другу или друг от друга для принудительного перемещения управляющих выступов в противоположных друг от друга направлениях в разблокированное положение. Например, это может осуществляться за счет того, что за счет введения разобщающего элемента в активированном положении в шлиц относящиеся друг к другу управляющие выступы поворачиваются или смещаются друг от друга, за счет чего расстояние между ними увеличивается. Например, разобщающий элемент может быть настолько коротким, что он в активном положении входит в зацепление между переведенными в разблокированное положение управляющими выступами и в результате этого не является прямо или опосредовано вводимым в контакт с третьим блокирующим элементом, чтобы вывести его из зацепления с одним из двух других блокирующих элементов.
Оптимальным, кроме того, может быть вариант, в котором разобщительное устройство включает в себя устройство возврата в исходное положение для автоматического перевода управляющего элемента из разблокированного положения в положение захвата, как только разобщающий элемент переводится из активного положения в неактивное положение. Чтобы за счет продолжительного времени активного разобщающего элемента снова перевести, своего рода, отключенный от своей функции управляющий элемент в положение захвата, необходимо только перевести разобщающий элемент в неактивное положение. Устройство возврата в исходное положение, в таком случае, автоматически переводит управляющий элемент из разблокированного положения, в котором он не может действовать как захват для разобщающего элемента, в положение захвата.
Согласно еще одной предпочтительной форме осуществления изобретения может быть предусмотрено, что первое и второе соединительное устройство включают в себя соответственно два первых и два вторых электрических контакта. Например, через уже находящиеся друг с другом в контакте в положении выключения вторые электрические соединительные контакты за счет подачи измерительного напряжения и определения протекающей через наконечник измерительной силы тока считывается один или несколько параметров последнего, чтобы можно было автоматически определить тип наконечника при помощи управляющего и/или управляющего устройства и затем, соответственно, задать параметры подачи напряжения на электродвигатель наконечника.
Преимущественным является вариант, в котором три из четырех электрических соединительных контактов находятся, соответственно, в проводящем электричество соединении с обмоткой электродвигателя. Таким образом, например, три обмотки электродвигателя могут непосредственно управляться тремя соединительными контактами. Четвертый электрический соединительный контакт может, например, опосредовано через последовательно включенное сопротивление также находиться в проводящем электричество соединении с обмоткой двигателя. Предпочтительным образом, в случае четвертого электрического соединительного контакта речь идет об одном из двух вторых эклектических контактов.
Оптимальным, кроме того, может быть вариант, когда соединительная система включает в себя линию электроснабжения с первым и вторым концом, если первое соединительное устройство установлено или выполнено на первом конце, и если второй конец соединен или выполнен с возможностью разобщаемого соединения с управляющим и/или регулирующим устройством для управления и/или регулирования хирургического электродвигателя. Разумеется, также альтернативным образом можно предусмотреть на первом конце линии электроснабжения второе соединительное устройство. Например, первое соединительное устройство линии электроснабжения может быть соединено или введено в зацепление со вторым соединительным устройством, которое, например, на хирургическом наконечнике может быть выполнено по выбору с электродвигателем или без него.
Преимущественным образом, если соединительная система включает в себя хирургический наконечник с электродвигателем для привода хирургического инструмента, который является подсоединяемым к наконечнику или подсоединен к нему, причем наконечник имеет проксимальный и дистальный конец, на проксимальном конце которого расположено или выполнено второе соединительное устройство. Такой хирургический наконечник может, в таком случае, например, быть соединен или введен в зацепление с включающей в себя первое соединительное устройство линией электроснабжения. Если линия электроснабжения и наконечник введены в зацепление друг с другом при помощи их обоих соединительных устройств, включающая в себя оба соединительных устройства соединительная система может быть использована, как описано выше, по выбору также для коммутации, то есть для целенаправленного приведения в действие электродвигателя наконечника. Прочие коммутационные устройства для включения или же выключения электродвигателя, в таком случае, больше не требуются в обязательном порядке.
Чтобы, например, управляющее и/или регулирующее устройство могло автоматически определить, какой тип наконечника соединен с ним, оптимально, если наконечник включает в себя по меньшей мере один кодирующий элемент для кодирования типа наконечника. Например, кодирующий элемент может быть выполнен в форме электронного коммутационного устройства. Прежде всего, в данном случае речь может идти о чипе считывания радиометок.
Особо простым образом может быть закодирован тип наконечника, если по меньшей мере один кодирующий элемент включает в себя сопротивление, которое имеет величину сопротивления, соответствующую типу наконечника или соотнесенную с ним. Например, как описано выше, положение выключения может быть определено за счет подачи электрического напряжения на вторые электрические соединительные контакты и за счет измерения, в данном случае, протекающей силы тока величины сопротивления, которая соответствует определенному типу наконечника. При осведомленности об ожидаемой величине сопротивления имеющихся в наличии наконечников, в таком случае, так легко может быть определен тип конкретным образом имеющегося в наличии наконечника.
Предпочтительным образом по меньшей мере один кодирующий элемент соединен электропроводящим образом со вторым соединительным контактом второго соединительного устройства. Таким образом, например, он может использоваться в положении выключения, чтобы автоматически определить тип наконечника.
Согласно еще одной предпочтительной форме осуществления изобретения может быть предусмотрено, чтобы наконечник включал в себя устройство подсоединения инструмента для разъемного соединения наконечника с обрабатывающим инструментом. Например, устройство подсоединения инструмента может быть расположено или выполнено таким образом, чтобы обрабатывающий инструмент имел возможность введения в зацепление с наконечником или же с его дистальным концом. Это имеет то преимущество, что при помощи наконечника по выбору могут быть соединены различные обрабатывающие инструменты, в зависимости от подлежащего осуществлению хирургического вмешательства.
Оптимальным образом устройство подсоединения инструмента из подсоединенного положения инструмента, в котором наконечник соединен с обрабатывающим инструментом, выполнен с возможностью приведения в разобщенное положение инструмента, в котором обрабатывающий инструмент является отсоединяемым от наконечника. Устройство подсоединения инструмента такого типа обеспечивает возможность простого отсоединения обрабатывающего инструмента от наконечника в разобщенном положении инструмента.
Особо преимущественным является вариант, в котором устройство подсоединения инструмента заблокировано в положении включения для предотвращения перевода из подсоединенного положения инструмента в разобщенное положение инструмента. Таким образом можно предотвратить, прежде всего, случайное отсоединение обрабатывающего инструмента оператором от наконечника, когда соединительная система занимает положение включения. Иными словами, таким образом можно предотвратить, прежде всего, отделение обрабатывающего инструмента от наконечника при работающем электродвигателе.
Оптимальным является вариант, в котором устройство подсоединения инструмента включает в себя по меньшей мере один установленный или расположенный на наконечнике с возможностью перемещения соединительный элемент инструмента, который выполнен с возможностью перемещения только в разобщенном положении или в положении выключения для прямой или опосредованной разблокировки обрабатывающего инструмента, чтобы отсоединить его от наконечника, и при котором блокирующее устройство в положении включения фиксирует в подсоединенном положении инструмента по меньшей мере один соединительный элемент инструмента. Например, таким образом можно предотвратить то, что оператор может привести в действие или переместить соединительный элемент инструмента, когда соединительная система находится в положении включения. Таким образом, устройство подсоединения инструмента, своего рода, зафиксировано или заблокировано в положении включения. Ошибочное отсоединение обрабатывающего инструмента от наконечника во время работы электродвигателя, в таком случае, больше невозможно.
Особо простым способом можно обеспечить, что вторые электрические соединительные контакты как в положении включения, так и в положении выключения находятся друг с другом в контакте или в зацеплении, если первые электрические соединительные контакты или по меньшей мере их часть короче, чем вторые электрические соединительные контакты. Например, при перемещении по направлению друг к другу обоих соединительных устройств вторые электрические соединительные контакты обоих соединительных устройств могут уже войти в контакт или в зацепление друг с другом, в то время как это возможно для первых электрических соединительных контактов только в том случае, когда оба соединительных устройства переместятся еще дальше по направлению друг к другу. Таким образом, положение включения и положение выключения могут быть легко заданы за счет соответствующего относительного положения обоих соединительных устройств.
Поставленная выше задача также решена в случае хирургической системы привода вышеописанного типа согласно изобретению за счет того, что она включает в себя одну из вышеописанных соединительных систем для электрического и механического соединения наконечника и линии электроснабжения.
Таким образом усовершенствованная приводная система также делает возможным включение наконечника только благодаря особой конструкции соединительной системы. Еще одно коммутационное устройство, в таком случае, в обязательном порядке больше не требуется. В целом, таким образом усовершенствованная система привода имеет также представленные выше в связи с предпочтительными формами осуществления хирургических соединительных систем преимущества.
Для управления и/или регулирования электродвигателем преимуществом является, если система привода включает в себя соответствующее управляющее и/или регулирующее устройство. Последнее может быть выполнено, прежде всего, взаимодействующим с хирургическим наконечником таким образом, что оно может автоматически считывать и распознавать, когда соединительная система занимает положение выключения.
Последующее описание предпочтительных форм осуществления изобретения служит вместе с чертежами для более детального разъяснения. На фигурах показаны:
Фиг.1: схематический общий вид хирургической системы привода,
Фиг.2: схематический, перспективный и частично сквозной вид хирургической соединительной системы,
Фиг.3: перспективный вид в частичном разрезе первого соединительного устройства соединительной системы с неактивным разобщительным устройством,
Фиг.3А: фрагментарный вид узла согласно фиг.3 с активным разобщительным устройством,
Фиг.4: перспективный вид в частичном разрезе второго соединительного устройства соединительной системы,
Фиг.5: изображение в разобранном виде в частичном разрезе второго соединительного устройства,
Фиг.5А: перспективный вид блокирующего элемента второго соединительного устройства,
Фиг.5Б: перспективный вид управляющего элемента второго соединительного устройства,
Фиг.6: частично сквозной вид в продольном разрезе соединительной системы до введения в зацепление электрических соединительных контактов обоих соединительных устройств,
Фиг.7А: вид соединительной системы аналогично фиг.6 в положении выключения,
Фиг.7Б: вид в частичном разрезе в направлении стрелки А на фиг.7А,
Фиг.8А: вид соединительной системы аналогично фиг.7А с неактивным разобщительным элементом,
Фиг.8Б: вид аналогично фиг.7Б узла соединительной системы согласно фиг.7А в направлении стрелки В,
Фиг.9: вид соединительной системы аналогично фиг.8А с неактивным разобщительным элементом в положении захвата управляющего элемента,
Фиг.10А: вид соединительной системы аналогично фиг.9 в коммутационном положении при переходе из положения выключения в положение включения,
Фиг.10Б: вид аналогично фиг.8Б узла соединительной системы согласно фиг.10А в направлении стрелки С,
Фиг.11А: вид соединительной системы аналогично фиг.10А в положении включения,
Фиг.11Б: вид аналогично фиг.10Б узла соединительной системы на фиг.11А в направлении стрелки D,
Фиг.12А: вид соединительной системы аналогично фиг.11А с неактивным разобщительным элементом в соединенном положении,
Фиг.12Б: вид аналогично фиг.11Б узла соединительной системы согласно фиг.12А в направлении стрелки Е,
Фиг.13: вид соединительной системы аналогично фиг.12А с активным разобщительным элементом и управляющим элементом в положении захвата,
Фиг.14: фрагмент перспективного вида второго примера осуществления хирургической соединительной системы в разобщенном положении,
Фиг.15: фрагмент вида в продольном разрезе соединительной системы согласно фиг.14 в положении выключения,
Фиг.16А: схематическая коммутационная схема соединительной системы в разобщенном положении,
Фиг.16Б: схематическая коммутационная схема соединительной системы в положении выключения, и
Фиг.16В: схематическая коммутационная схема соединительной системы в положении включения.
На фиг.1 схематично показана хирургическая система привода, обозначенная в целом ссылочным обозначением 10, включающая в себя управляющее и/или регулирующее устройство в форме прибора 12 управления, пять наконечников 14а-14е, два шейверных наконечника 16а и 16b, наконечник 18 пистолетного типа, две линии электроснабжения в форме соединительных кабелей 20 и 22, в также педальное управление 24. Все указанные наконечники включают в себя интегрированный электродвигатель в качестве привода и, таким образом, образуют приводные узлы.
Прибор 12 управления включает в себя расположенный в корпусе 26 плоский экран 28 в форме сенсорного экрана. С обеих сторон экрана 28 расположены, соответственно, по три эксплуатационных элемента 30а-30с или же 30d-30f.
Два переключателя 32а и 32b расположены под экраном 28 на одной линии с присоединительной втулкой 34 для подключения педального управления 24 через дополнительный присоединительный кабель 25 и с двумя присоединительными втулками 36а и 36b для подключения присоединительного кабеля 20 и 22, при помощи которых наконечники могут быть соединены с прибором 12 управления. Дополнительным образом, кроме того, может быть предусмотрено подключение 38 для жидкостной системы для подачи и отвода текучих сред из операционной области, например, также для питания промывочных или вытяжных каналов в непоказанных унифицированных приводных механизмах или инструментах, имеющих возможность соединения с наконечниками 14, шейверными наконечниками 16 или наконечником 18 пистолетного типа, вместе с которыми наконечники образуют хирургические инструменты приводной системы 10.
Наконечники 14а-14е включают в себя, соответственно, кабельные соединения 40а-40е, которые имеют возможность любого соединения с соединительным элементом 44 соединительного кабеля 20 или с соединительным элементом 46 соединительного кабеля 22. Также оба шейверных наконечника 16а и 16b, а также наконечник 18 пистолетного типа имеют, соответственно, кабельное соединение 40f, 40g или же 40h, которое имеет возможность соединения с одним из соединительных элементов 44 или 46.
На их, соответственно, другом конце наконечники 14а-14е снабжены муфтами передачи или муфтами инструмента, которые определяют устройства 42а-42е подсоединения инструмента, к которым присоединяются не показанные унифицированные приводные механизмы, например, снабженные борами, лезвиями или тому подобным, и которые могут иметь привод от наконечников 14а-14е. В зависимости от формы осуществления наконечники 14а-14е также могут быть непосредственно снабжены не показанными обрабатывающими инструментами, такими как, например, боры или лезвия, для укомплектования хирургических инструментов.
Наконечники 14а-14е, предпочтительным образом, не имеют датчиков, то есть у них отсутствуют датчики для определения числа оборотов наконечников 14а-14е во время эксплуатации. Наконечники приводной системы 10 различаются не только внешне, как схематично показано на фиг.1, но также в отношении их внутренней конструкции. Это означает, что установленные в наконечниках 14а-14е электродвигатели могут быть различного типа и могут отличаться, например, по своим параметрам, таким как, например, минимальное число оборотов, максимальное число оборотов, максимальный крутящий момент. Кроме того, как, например, в случае обоих шейверных наконечников 16а и 16b, могут быть интегрированы передаточные механизмы, которые дополнительно также могут быть интегрированы в унифицированные передаточные механизмы, имеющие возможность подсоединения к наконечникам 14а-14е, а также к наконечнику 18 пистолетного типа. Унифицированные передаточные механизмы в зависимости от формы осуществления также могут сами быть дополнительно снабжены различными инструментальными насадками в форме хирургических инструментов.
Кроме того, шейверные наконечники 16а и 16b включают в себя, соответственно, шейверную муфту 48а или же 48b для подсоединения шейверной насадки, например, для применения в артроскопии.
Соединительные кабели 20 и 22 предусмотрены для соединения прибора управления с муфтами 21 и 23, через которые они могут быть соединены с соединительными втулками 36а и 36b.
Педальное управление 24 находится в соединении с прибором 12 управления через беспроводное устройство передачи данных, например через инфракрасную или радиосистему передачи данных. Дополнительным образом соединение педального управления 24 также возможно через соединительный элемент 50 соединительного кабеля 25, имеющий возможность соединения с соединительной втулкой 34. На корпусе 52 педального управления 24 расположены два выключателя 54а и 54b с возможностью педального привода, посредством которых может, прежде всего, регулироваться левый или же правый ход наконечников.
Наконечник 18 пистолетного типа снабжен двумя датчиками 56, причем датчик 56а, например, может быть предусмотрен для активации правого хода двигателя, датчик 56b - для активации левого хода двигателя.
Соединительные кабели 20 и 22 различаются тем, что на соединительном кабеле 22, в отличие от соединительного кабеля 20 предусмотрен приводной рычаг 58, при помощи которого оператор может активировать работу двигателя наконечника 14, шейверного наконечника 16 или наконечника 18 пистолетного типа. Приводной рычаг 58 имеет функцию датчика числа оборотов, при помощи которого оператор может задать число оборотов двигателя.
Дополнительно к предусмотренному у соединительного кабеля 22 приводному рычагу 58, который, таким образом, создает выполненное на соединительном кабеле 22 устройство определения числа оборотов, также может быть предусмотрена схематично показанная на фиг.2 и в целом обозначенная ссылочным обозначением 60 хирургическая соединительная система. Таким образом, как соединительный элемент 44 на соединительном кабеле 20, так и соединительный элемент 46 на соединительном кабеле 22 может быть выполнен в форме первого соединительного устройства 62, кабельное соединение 40 на схематически показанном на фиг.2 наконечнике 14 - в форме второго соединительного устройства 64. Соединительная система на фиг.2 показана в разобщенном положении, в котором оба соединительных устройства 60 и 62 полностью отделены друг от друга, то есть, прежде всего, механически не находятся в зацеплении. Каждое из обоих соединительных устройств 62 и 64 включает в себя по четыре электрических соединительных контакта. Первое соединительное устройство 62 включает в себя соединительные контакты 66, 67, 68 и 69, второе соединительное устройство 64 включает в себя соединительные контакты 70, 71, 72 и 73. Соединительный кабель 20 включает в себя только три линии 74, 75 и 76, через которые на три обмотки 78, 79 и 80 интегрированного в наконечник 14 электродвигателя 82 может подаваться питание. При этом соединительный контакт 66 соединен с линией 74 с проведением электричества, соединительный контакт 67 - с линией 75. Кроме того, оба соединительных контакта 68 и 69 соединены с линией 76 с проведением электричества.
Для механического соединения обоих соединительных устройств 62 и 64 первое соединительное устройство 62 включает в себя первый соединительный элемент 84 и второе соединительное устройство 64 - второй соединительный элемент 86. Последние могут быть введены в зацепление друг с другом в соединенном положении. На фиг.7 схематично показана соединительная система 60 в соединенном положении. Первый соединительный элемент 84 предпочтительным образом выполнен в форме соединительной втулки 88, в которую может быть введен выполненный в форме соединительной цапфы 90 второй соединительный элемент 86 в направлении, параллельном продольной оси 92 соединительной системы 60.
Первое соединительное устройство 62 включает в себя проксимальный конец, который выполнен в форме служащей в качестве разгрузки от натяжения защитной оболочки кабеля 94, из которой выведен включающий в себя три линии 74, 75 и 76 кабель 96. В дистальном направлении от защитной оболочки кабеля 94 располагается по существу осесимметричный корпус 98 подшипника, который охватывает обращенная в дистальном направлении соединительная втулка 88. Внутри соединительной втулки 88 расположен исходящий из корпуса 98 подшипника цилиндрический корпус 100 втулки, который включает в себя четыре выполненных внутри из электропроводного материала контактных гнезда 102, 103, 104 и 105. Контактные гнезда 102, 103, 104 и 105 представляют собой электрические соединительные контакты 66, 67, 68 и 69. Они открыты в дистальном направлении и своими продольными осями расположены параллельно продольной оси 92. На некотором расстоянии от дистального конца 106 соединительной втулки 88 на ее внутренней стенке 108 расположены два периферических кольцевых паза 110 и 112, которые определяют блокирующие выемки и находятся на расстоянии друг от друга в аксиальном направлении. Кольцевой паз 110 направлен от конца 106 на примерно таком же расстоянии к дистальному концу 114 корпуса 100 втулки.
Несколько с проксимальной стороны кольцевого паза 110 соединительная втулка 88 снабжена ориентированным поперек относительно продольной оси 92 отверстием 116, в которое входит короткий цилиндрический штифт 118, который образует разобщающий элемент 120 и расположен на разобщающем рычаге 122 на расстоянии по вертикали. Разобщающий рычаг 122 выполнен из L-образной плоской пружины 124, которая включает в себя короткое плечо 126, которое зафиксировано на корпусе 98 подшипника при помощи винта 128, продольная ось которого расположена параллельно продольной оси 92. Длинное плечо 130 плоской пружины 124 выходит через отверстие 132 соединительной втулки 88 наружу и располагается по существу параллельно продольной оси 92 за пределами соединительной втулки 88 в дистальном направлении. Исходя из дистального конца 134 длинного плеча 130, на внешней стороне 136 последней расположен управляющий выступ 138. Последний выступает через отверстие 140 в форме удлиненного отверстия по существу вытянутого квадратного по форме направляющего элемента 142. Направляющий элемент 142 имеет обращенный по направлению к продольной оси 92 выступ 144, который с проксимальной стороны входит в зацепление в отверстие 132 и, с одной стороны, прилегает к краю последнего и, с другой стороны, - к плечу 126. Он также зафиксирован винтом 128 на корпусе 98 подшипника. С дистальной стороны на направляющем элементе 142 выполнена указывающая в проксимальном направлении выемка 146, в которой входит в зацепление конец 106. Для однозначного позиционирования направляющего элемента 142 на соединительной втулке 88 последняя выполнена, исходя из конца 106 в направлении вдоль окружности в соответствии с шириной направляющего элемента 142 несколько тоньше, так чтобы было задано однозначное позиционирование направляющего элемента в направлении вдоль окружности. Дистальный конец направляющего элемента 142 расположен в дистальном направлении параллельно продольной оси 92, выступая вперед за пределы конца 106, и образует блокирующий элемент 148, функция которого описана далее ниже.
Как схематично показано на фиг.3А, за счет приложения усилия к управляющему выступу 138 в направлении стрелки 150, то есть поперек продольной оси 92 и по направлению к ней, разобщающий рычаг 122 своим обращенным в дистальном направлении концом по направлению к продольной оси 92 может поворачиваться до тех пор, пока нижняя сторона 152 плеча 130 не будет прижата к внешней стороне 154 соединительной втулки 88. На фиг.3А, таким образом, показано активное положение разобщающего элемента 120, на фиг.2 - его неактивное положение. Направляющий элемент 142 включает в себя, кроме того, направляющий заплечик 156, который несколько выступает из внутренней стенки 108 по направлению к продольной оси 92. Он служит для центрирования при введении в зацепление обоих соединительных устройств 62 и 64.
Конструкция второго соединительного устройства 62 далее поясняется более подробно в связи с фиг.4 и 5.
Осесимметричный корпус 158 подшипника одновременно определяет дистальный конец 160 второго соединительного устройства 64, к которому примыкает корпус 162 наконечника 14. Соединительная цапфа 90, таким образом, в проксимальном направлении отстоит от корпуса 158 подшипника и, таким образом, от корпуса. Она выполнена не монолитно, а состоит из нескольких частей. Монолитно с корпусом 158 подшипника выполнена втулка 164 цапфы. Последняя включает в себя короткий участок 166, который в наружном диаметре несколько сокращен относительно цилиндрического внутреннего участка 168. С проксимальной стороны к участку 166 примыкает еще один цилиндрический участок 170, внешний диаметр которого относительно внешнего диаметра участка 166 еще в некоторой степени уменьшен. С проксимальной стороны к участку 170 примыкает еще один цилиндрический участок 172, который в целом составляет несколько больше половины общей длины втулки 164 цапфы. Последний по существу цилиндрический участок 174 образует расположенный до проксимального конца 176 кольцевой фланец 178. Последний во внутренней области снабжен кольцевым пазом 180.
На внешней стороне участок 172 имеет плоскую выемку 182, в которую вставлен блокирующий элемент 184. Последний выполнен из упруго-эластичного материала и включает в себя определяющий дистальный конец фиксирующий участок 186, который выходит за пределы вписанного угла 180°. Внутренний изгиб фиксирующего участка 186 адаптирован к участку 170. Для однозначного позиционирования фиксирующего участка 186 на втулке 164 цапфы на участке 170 непосредственно на границе с участком 166 расположен прямоугольный заплечик 188, который входит в зацепление в соответствующую, обращенную в дистальном направлении выемку 190 на фиксирующем участке 186.
В проксимальном направлении от фиксирующего участка 186 расположен фиксирующий элемент 192, который, исходя из проксимального конца 194, снабжен шлицом 196. Таким образом, создаются практически два упруго-эластичных держателя 198, которые выполнены симметрично относительно плоскости 92 симметрии, в которой находится продольная ось 92. Фиксирующий элемент 192, кроме того, имеет два расположенных поперек продольной оси 92 отверстия 200 и 202. Отверстие 202 выполнено непосредственно исходящим из конца 194 и имеет по существу полукруглую форму. Отверстие 200 расположено на расстоянии 204 от отверстия 202.
Держатели 198 имеют, соответственно, обращенные друг от друга в направлении вдоль окружности фиксирующие бортики 206, которые являются опорой для, соответственно, обращенного в радиальном направлении от продольной оси 92 осесимметричного блокирующего выступа 208. Диаметр блокирующих выступов 208 соответствует примерно ширине 210 кольцевых пазов 110 и 112. Выемка 182 выполнена и измерена таким образом, что держатели 198 при соответственной подаче усилия имеют возможность поворота, в некоторой степени, в направлении продольной оси 92. Блокирующие выступы 208, таким образом, образуют цапфу с возможностью перемещения в радиальном направлении.
К отвернутой от продольной оси 92 внешней стороне фиксирующего элемента 192 частично прилегает элемент 212 управления. Он включает в себя фиксирующий участок 214, который частично перекрывает фиксирующий участок 186. Для однозначного позиционирования управляющего элемента 212 относительно корпуса 158 подшипника на участке 166 в радиальном направлении выполнен выступающий узкий прямоугольный заплечик 216, который входит в зацепление в соответствующую выемку 218 на фиксирующем участке 214. Управляющий элемент 212, как и фиксирующий элемент 192 выполнены зеркально симметрично относительно плоскости симметрии, в которой находится продольная ось 92. На нем имеются два удаленных от фиксирующего участка 214 в проксимальном направлении и по существу параллельно отстоящие от продольной оси 92 управляющих рычага 220. Последние отделены друг от друга зазором 222. Ширина 224 зазора 222 в направлении вдоль окружности несколько больше, чем диаметр 226 разобщающего элемента 120. От обращенных друг к другу внутренних граней 228 управляющих рычагов 220 отстоят обращенные друг к другу на проксимальном конце 230 управляющих рычагов 220 два управляющие выступа 232, которые отделены друг от друга зазором 234. На расстоянии 236 от него в дистальном направлении от внутренних граней 228 отстоят обращенные друг от друга два вторые управляющие выступа 238, которые отделены друг от друга еще одним зазором 240. Кроме того, управляющий элемент 212 имеет U-образный шлиц 242, который разделяет каждый управляющий рычаг 220 на два расположенных по существу параллельно друг другу управляющих плеча 244 и 246. Дистальные конца управляющих плеч 244, выступающих опорой управляющих выступов 232 и 238, отделены друг от друга еще одним зазором 248.
Особая конструкция управляющего элемента 212 обеспечивает возможность того, что управляющие рычаги 220 своими концами 230 могут поворачиваться по направлению к продольной оси 92 и обратно. Кроме того, концы 230 в направлении вдоль окружности могут поворачиваться друг от друга и обратно, чтобы увеличить зазор 234 и 240. Кроме того, дистальные концы 250 управляющих плеч 246 в направлении вдоль окружности могут поворачиваться друг от друга и обратно, чтобы увеличить зазор 248.
Корпус 158 подшипника, исходя из конца 176, огибает расположенную в дистальном направлении защитную втулку 252. Последняя снабжена сквозным продольным шлицом 254, параллельно которому, кроме того, расположены два продольных отверстия 256. Продольные отверстия 256 имеют такие размеры по ширине, что блокирующие выступы 208 могут входить в зацепление насквозь через них. Внешний контур соединительной цапфы 90, поэтому, по существу обусловлен определенной защитной втулкой 252 огибающей кривой, за пределы которой по существу положении блокирующие выступы 208 несколько выступают в радиальном направлении.
Корпус подшипника 158, исходя из своего конца 176, снабжен глухим отверстием 258. В глухом отверстии 258 расположены четыре контактных штифта 260, 261, 262 и 263, которые имеют свободные, обращенные в проксимальном направлении концы и выполнены в соответствии с контактными гнездами 102, 103, 104 и 105. Контактные штифты 260, 261, 262 и 263 представляют собой электрические соединительные контакты 70, 71, 72 и 73.
Соединительный контакт 70, как схематично показано на фиг.16А, соединен с обмоткой 79 двигателя с проведением электричества. Обмотка 79 двигателя соединена с обмотками 78 и 80 двигателя в форме звезды. Обмотка 78, кроме того, соединена с соединительным контактом 71 с проведением электричества. Обмотка 80, с одной стороны, соединена с соединительным контактом 72 с проведением электричества и, с другой стороны, с сопротивлением 264, которое образует кодирующий элемент 266 для кодирования типа наконечника 14. Величина сопротивления 264 однозначно соотнесена с видом или же типом наконечника 14 или же соответствует им, соответственно. Прежде всего, соотнесение может быть определено видом электродвигателя 82, так что приведенное в соответствие с наконечником 14 управление электродвигателем 82 может осуществляться при помощи прибора 12 управления. Сопротивление 264 включается последовательно между обмоткой 80 двигателя и соединительным контактом 73.
Контактные штифты 261 и 262 короче, чем контактные штифты 260 и 263. Расстояние 268 между свободными концами контактных штифтов 261 и 262, с одной стороны, и 260 и 263, с другой стороны, параллельно продольной оси 92 несколько больше, чем расстояние 270 между кольцевыми пазами 110 и 112.
На корпусе 162, кроме того, предусмотрено устройство 272 подсоединения инструмента для разобщаемого соединения дистального конца наконечника 14 при помощи не показанного более подробно обрабатывающего инструмента. Оно включает в себя соединительный элемент 274 инструмента, который для отсоединения обрабатывающего инструмента имеет возможность перемещения в направлении стрелки 276 в некоторой степени по направлению к корпусу 158 подшипника. Соединительный элемент 274 инструмента частично проходит через корпус 162 и имеет свободный конец 278, который обращен в проксимальном направлении.
Принцип действия соединительной системы 60 далее поясняется более подробно при помощи фиг.7А-13.
Исходя из показанного на фиг.2 разобщенного положения, соединительные устройства 62 и 64 могут вместе входить в зацепление, так что они занимают механически соединенное положение, как схематично показано на фиг.7А. При этом не существенно, занимает ли разобщающий элемент 120 активное или неактивное положение. На фиг.7А показан разобщающий элемент 120 в активном положении. Штифт 118, в таком случае, выходит за пределы внутренней стенки 108 настолько далеко, что он скользит по обращенным в проксимальном направлении наклонным ребрам 280 скольжения первых управляющих выступов 232 и за счет увеличения зазора 234 входит в зацепление между ними и раздвигает их по направлению друг от друга. Расстояние первых управляющих выступов 232 в данном положении, которое обозначено как разобщенное положение и схематично показано на фиг.7Б, больше, чем в показанном на фиг.4 положении захвата, в котором захвачен управляющий элемент 212 без воздействия на него внешних сил.
Первые управляющие выступы 232, кроме того, расположены таким образом, что они перекрывают отверстие 202 в положении захвата и освобождают его в разобщенном положении. Разобщающий элемент 120, таким образом, в разобщенном положении не может входить в контакт с фиксирующим элементом 192. Таким образом, держатели 198 в своем основном положении могут занимать свое максимально отпружиненное от продольной оси 92 положение. Если соединительная цапфа 90 введена в соединительную ось 88 настолько далеко, что блокирующие выступы 208 находятся на высоте кольцевого паза 110, то держатели 198 отпружинивают в радиальном направлении от продольной оси 92, и блокирующие выступы 208 входят в зацепление в кольцевой паз 110. Это возможно, так как при введении соединительной цапфы 90 блокирующие выступы 208 скользят на внутренней стенке 108 и в некоторой степени поворачиваются по направлению к продольной оси 92.
Кольцевые пазы 110 и 112 образуют первый и второй блокирующие элементы 282 и 284, блокирующие выступы 208 - третьи блокирующие элементы 286 в целом обозначенного ссылочным обозначением 288 блокирующего устройства.
В показанном на фиг.7А положении выключения соединительной системы 60 контактные штифты 260 и 263 входят в зацепление в соответствующие контактные гнезда 102 и 105. За счет этого замыкается электрический контур, в котором соединительный контакт 70 включается последовательно с обмоткой 79 двигателя, обмоткой 80 двигателя, сопротивлением 264, а также соединительным контактом 73. Это схематично показано на фиг.16. В положении выключения за счет подачи напряжения в линии 74 и 76 за счет определения, в таком случае, протекающей силы тока при известных значениях сопротивления обмоток 79 и 80 двигателя рассчитывает значение сопротивления 264, и на основании таким образом полученного значения сопротивления снова делают заключение о типе электродвигателя 82. Это определение может осуществляться автоматически за счет соответствующей конструкции или программирования прибора 12 управления.
При помощи прибора управления 12, в таком случае, электродвигатель 82 может регулироваться желаемым образом, например, для приведения обрабатывающего инструмента во вращение при помощи электродвигателя 82.
Соединительная система 60, кроме того, включает в себя фиксатор 290 коммутационного положения для механической фиксации включенного в соединительную систему 60 и выполненного за счет взаимодействия обоих соединительных устройств 62 и 64 коммутационного устройства 292 в описанном положении выключения, а также в положении включения, в котором каждый из контактных штифтов 260, 261, 262 и 263 входит в зацепление в, соответственно, относящееся к нему контактное гнездо 102, 103, 104 или же 105. Фиксатор 290 коммутационного положения включает в себя блокирующее устройство 288, которое выполнено для механической блокировки занимающих соединенное положение соединительных устройств 62 и 64 в описанном положении выключения, а также в описанном еще позднее положении включения коммутационного устройства 292. Кроме того, фиксатор 290 коммутационного положения включает в себя в целом обозначенное ссылочным обозначением 294 разобщающее устройство для механического разобщения блокирующего устройства. Преимущественным является вариант, если разобщающее устройство 294 выполнено для выведения из зацепления блокирующих элементов 282 и 286 из положения включения в коммутационное положение, в котором соединительные устройства 62, 64 являются перемещаемыми друг относительно друга в аксиальном направлении. Для этого разобщающее устройство 294 включает в себя разобщающий элемент 120. В случае представленной на фигурах соединительной системы 60 разобщающий элемент 120 имеет конструкцию, предназначенную для опосредованного введения в зацепление или в контакт с третьим блокирующим элементом 286 для перевода блокирующего устройства 288 как из положения выключения, так и из положения включения в коммутационное положение.
Если, как описано выше, соединительная цапфа 90 при приведенном в действие разобщающем элементе 20 входит в зацепление в соединительную втулку 88, разобщающий элемент 120 разжимает первые управляющие выступы 232, в результате чего приведение в действие фиксирующего элемента 192, вследствие которого оба блокирующих элемента 286 были бы выведены из кольцевого паза 110, становится невозможным. Для этого сначала необходимо разблокировать разобщающий элемент 120, чтобы управляющий элемент 212 мог перейти из разблокированного положения в положение захвата. Третьи блокирующие элементы 286, которые расположены или же установлены на фиксирующем элементе 192, в таком случае, перемещаются за счет воздействия устройства 296 предварительного натяжения по направлению от продольной оси 92 в радиальном направлении в кольцевой паз 110. Включенное в блокирующее устройство 288 устройство 296 предварительного натяжения служит для фиксации блокирующих элементов 282 и 286, с одной стороны, и 284 и 286, с другой стороны, в положении выключения или же в положении включения. Блокирующие элементы 282 и 286 или же 284 и 286 могут быть выведены из зацепления только против оказываемого устройством 296 предварительного натяжения усилия предварительного натяжения. Устройство 296 предварительного натяжения включает в себя держатели 198 и, таким образом, фиксирующий элемент 192, который выполнен упруго-эластичным и без оказываемого со стороны разобщающего элемента 120 усилия перемещает блокирующие элементы 286 по направлению от продольной оси 292 или фиксирует их в максимально удаленном от продольной оси 292 положении.
Таким образом обеспечивается то, что при введении соединительных устройств 62 и 64 в зацепление соединительная система 60 сначала занимает положение выключения, независимо от того, приведен ли разобщающий элемент 120 в действие или нет, предусмотрен управляющий элемент 212. Она может быть переведена из положения захвата, в котором разобщающий элемент 120 при помощи управляющего элемента 212 может опосредовано входить в контакт или в зацепление с третьим блокирующим элементом 266 для перевода блокирующего устройства 288 из положения выключения или из положения включения в коммутационное положение, в разобщенное положение, в котором разобщающий элемент 120 не может быть в достаточной степени прямо или опосредовано входить в контакт или в зацепление с третьим блокирующим элементом 286 для перевода блокирующего устройства 288 из положения выключения или из положения включения в коммутационное положение. Это разблокированное положение схематично показано на фиг.7А и 7Б. За счет разжимания управляющего элемента 212 при вхождении разобщающего элемента 120 в зацепление между первыми управляющими выступами 232, в таком случае, если разобщающий элемент 120 занимает активное положение, не возможно при помощи разобщающего элемента 120 переместить фиксирующий элемент 192 по направлению к продольной оси 92, чтобы за счет этого вывести блокирующие элементы 286 и 282 из зацепления. Чтобы последнее стало возможно, сначала необходимо перевести разобщающий элемент 120 в его неактивное положение. Это осуществляется просто за счет того, что оператор разблокирует управляющий выступ 138, так что разобщающий рычаг 122 может отпружинить обратно в свое исходное положение, в котором разобщающий элемент 120 в некоторой степени выступает за пределы внешней стороны 136 направляющего корпуса 142.
За счет перемещения разобщающего элемента 120 наружу из зазора 234 между первыми управляющими выступами 232, последние по причине упруго-эластичного выполнения управляющих плеч 244 отпружинивают обратно в свое приблизительное исходное положение или в положение захвата. В нем первые управляющие выступы 232 перекрывают отверстие 200. Если разобщающий элемент 120 теперь снова привести в действие, то есть переместить по направлению к продольной оси 92, то он сначала упрется в оба управляющих выступа, как это схематично показано на фиг.9, и захватит при поворотном движении управляющих рычагов 220 по направлению к продольной оси 92 держатели 198, за счет чего блокирующие элементы 286 выйдут из кольцевого паза 110. Теперь соединительная система 60 находится в коммутационном положении. Оба соединительных устройства 62 и 64 теперь либо снова возвращаются обратно в разобщенное положение, в котором они раздвигаются, или еще дальше совмещаются, чтобы перевести коммутационное устройство 292 из положения выключения в положение включения.
Если соединительные устройства 62 и 64, как схематично показано на фиг.10А и 10Б, продолжают совершать перемещение по направлению друг к другу, то при активном разобщающем элементе 120 фиксирующий элемент 192 отпружинивает радиально наружу, как только разобщающий элемент 120 входит в зацепление в области между первыми управляющими выступами 232 и вторыми управляющими выступами 238. Если разобщающий элемент 120 остается активным и соединительные устройства 62 и 64 продолжают совершать перемещение по направлению друг к другу, то разобщающий элемент упирается в обращенные в проксимальном направлении ребра 298 скольжения вторых управляющих выступов 238 и проникает между ними в зазор 240, за счет чего управляющие рычаги 220 снова раздвигаются и вторые управляющие выступы 238 совершают перемещение по направлению друг от друга при равномерном увеличении расстояния между ними и, таким образом, также ширины зазора 240. Управляющий элемент 212 теперь снова занимает разобщенное положение, в котором разобщающий элемент 120 находится прямо над отверстием 200 и, таким образом, не может войти в зацепление с фиксирующим элементом 192 и, таким образом, опосредовано с третьими блокирующими элементами 286. Точно в положении, в котором разобщающий элемент 120 входит в зазор 240, находятся блокирующие элементы 286 на высоте кольцевого паза 112 и, таким образом, при помощи устройства 296 предварительного натяжения входят в зацепление со вторым блокирующим элементом 284. Иными словами, соединительная система 60 автоматически блокируется в положении включения, как только блокирующие выступы 208 находятся аксиально на высоте кольцевого паза 212.
В положении включения в зацеплении находятся также соединительные контакты 67 и 71, с одной стороны, а также соединительные контакты 68 и 72, с другой стороны. Положение включения схематично показано на фиг.16В. В положении включения на обмотки 78, 79 и 80 при помощи прибора 12 управления любым образом может подаваться напряжение, чтобы привести электродвигатель 82 и при необходимости соединенный с ним обрабатывающий инструмент во вращение.
Кроме того, блокирующее устройство 288 имеет еще дополнительную функцию. В положении включения соединительной системы 60, как схематично показано на фиг.12А, блокирующий элемент 148 имеет упор для соединительного элемента 274 инструмента и предотвращает его перемещение в проксимальном направлении. Если обрабатывающий инструмент соединен с наконечником 14 и соединительный элемент 274 инструмента в своем дистальном положении, то есть не возвращенном назад, то соединительный элемент 272 инструмента занимает подсоединенное положение инструмента. Возвращение в проксимальном направлении в разобщенное положение инструмента, таким образом, возможно, если соединительная система 60 не находится в положении включения, то есть расстояние между блокирующим элементом 148 и проксимальным концом соединительного элемента 274 инструмента достаточно велико, так что последний может перемещаться из подсоединенного положения инструмента в разобщенное положение инструмента. Эта предохранительная функция соединительной системы 60 предотвращает то, чтобы оператор в том случае, когда соединительная система 60 находится во включенном положении, по ошибке привел в действие соединительный элемент 274 инструмента и, таким образом, могло быть предотвращено нежелательное отсоединение или разобщение соединенного с наконечником 14 обрабатывающего инструмента.
Если соединительная система 60 занимает положение включения, то она может быть активно переведена только из положения включения сначала в коммутационное положение, если разобщающий элемент 120 по меньшей мере однократно был переведен в его неактивное положение. Это схематично показано на фиг.12А и 12Б. Для разблокировки, то есть для выведения из зацепления блокирующих выступов 208 и кольцевого паза 112 затем разобщающий элемент 120 должен быть снова перемещен по направлению к продольной оси 92. За счет перевода разобщающего элемента 120 из активного в неактивное положение вторые управляющие выступы 238 могут быть снова перемещены друг к другу за счет воздействия управляющих рычагов 220, образующих устройство 300 возврата, за счет чего уменьшается зазор 240. Перемещение разобщающего элемента 120 по направлению к теперь, как схематически показано на фиг.12Б, занимающему положение захвата управляющему элементу 212 позволяет использовать последний как, своего рода, захват для фиксирующего элемента 192, так что вследствие поворота вторых управляющих выступов 238 по направлению к продольной оси 92 держатели 198 также поворачиваются по направлению к продольной оси 92, за счет чего блокирующие выступы 208 и кольцевой паз 212 выходят из зацепления. Это схематично показано на фиг.13. Соединительные устройства 62 и 64 теперь снова могут быть извлечены друг из друга.
Впрочем, при разобщении переход из положения выключения также невозможно, как и уже при сообщении соединительных устройств 62 и 64. Если разобщающий элемент 120 приводится в действие при разобщении соединительных устройств 62 и 64, то сначала он входит в контакт с обращенными в дистальном направлении наклонными ребрами 302 скольжения первых управляющих выступов 232 и снова их размыкает. Как только блокирующие выступы 208 находятся на высоте кольцевого паза 110, устройство 296 предварительного натяжения оказывает воздействие на их фиксацию друг с другом. Таким образом, может быть предотвращено то, что при переходе из положения включения в положение выключения соединительные устройства 62 и 64 разобщаются друг с другом. Однако если это является желаемым, то сначала необходимо снова перевести разобщающий элемент 120 в его неактивное положение. За счет разблокирования зазора 234 первые управляющие выступы 232 снова отпружинивают обратно друг к другу, то есть снова занимают положение захвата, и обеспечивают возможность того, что вследствие нового приведения в действие разобщающего элемента 120 блокирующие выступы 208 и кольцевой паз 110 снова могут выходить из зацепления. Соединительная система 60 теперь может быть либо переведена в свое разобщенное положение, либо снова обратно в положение включения.
За счет особого выполнения соединительной системы 10, таким образом, может быть легко выполнен электромеханический коммутационный элемент в форме щелевого устройства 292.
Легко модифицированная форма выполнения соединительной системы 60 частично показана схематично на фиг.14 и 15. Она отличается от вышеописанной соединительной системы 60 только формой блокирующих выступов 208. Последние в случае показанного на фиг.14 и 15 примера осуществления имеют по существу прямоугольную форму, в отличие от осесимметричного варианта выполнения в случае показанного на фиг.2-13 примера осуществления.
Предпочтительным образом, соединительная система изготовлена исключительно из материалов, которые пригодны для стерилизации горячим паром.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ ДЛЯ МИНИМАЛЬНО ИНВАЗИВНЫХ ХИРУРГИЧЕСКИХ ПРОЦЕДУР | 2011 |
|
RU2524132C2 |
| СИСТЕМЫ СШИВАНИЯ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СШИВАЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2494691C2 |
| КОНФИГУРАЦИИ БЛОКИРОВКИ ПУСКОВОЙ СИСТЕМЫ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2013 |
|
RU2645408C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ОТСОЕДИНЕНИЕМ СТВОЛА, МЕХАНИЗИРОВАННЫМ ЗАПУСКОМ И МЕХАНИЗИРОВАННЫМ ШАРНИРНЫМ СОЧЛЕНЕНИЕМ | 2016 |
|
RU2728508C1 |
| СИСТЕМЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ | 2014 |
|
RU2654602C2 |
| СИСТЕМА ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА, ВКЛЮЧАЮЩАЯ СМЕННЫЕ КОНЦЕВЫЕ ЭФФЕКТОРЫ | 2013 |
|
RU2642947C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО С РОБОТИЗИРОВАННЫМ ПРИВОДОМ И АКТИВИРУЕМОЙ ВРУЧНУЮ РЕВЕРСИРУЮЩЕЙ СИСТЕМОЙ | 2013 |
|
RU2641977C2 |
| ХИРУРГИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА | 2014 |
|
RU2693674C2 |
| СОЕДИНИТЕЛЬНЫЕ УСТРОЙСТВА РАБОЧЕГО ОРГАНА ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СШИВАЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2489975C2 |
| СПОСОБ И СИСТЕМА ДЛЯ РАБОТЫ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2666116C2 |
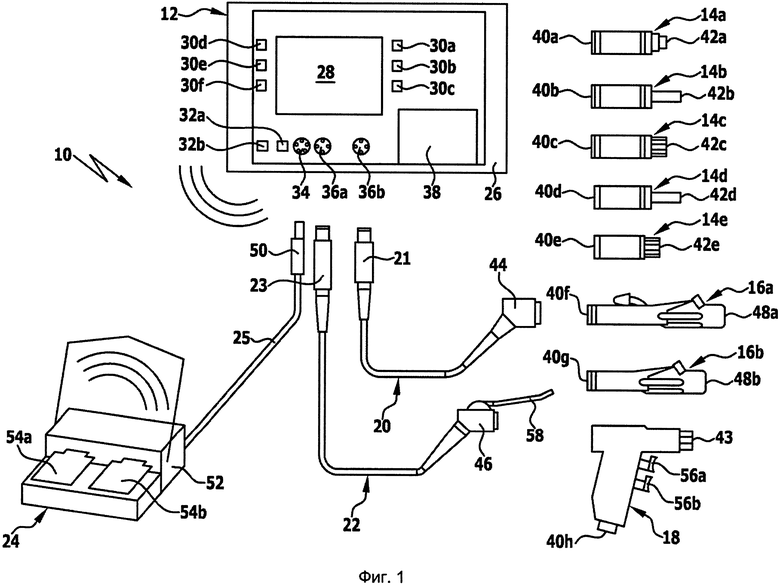

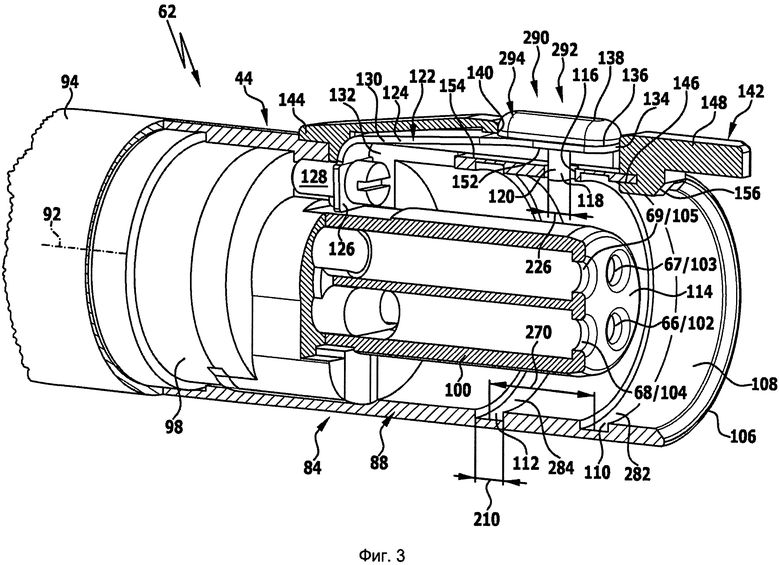
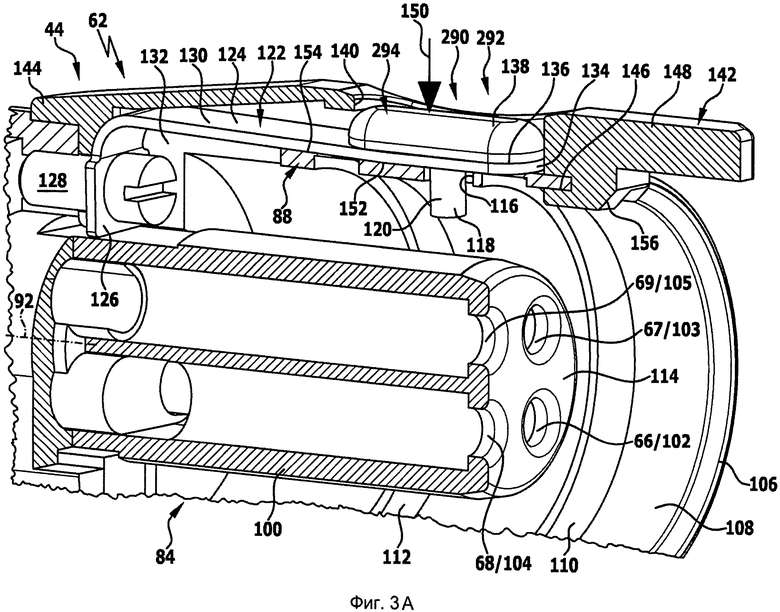
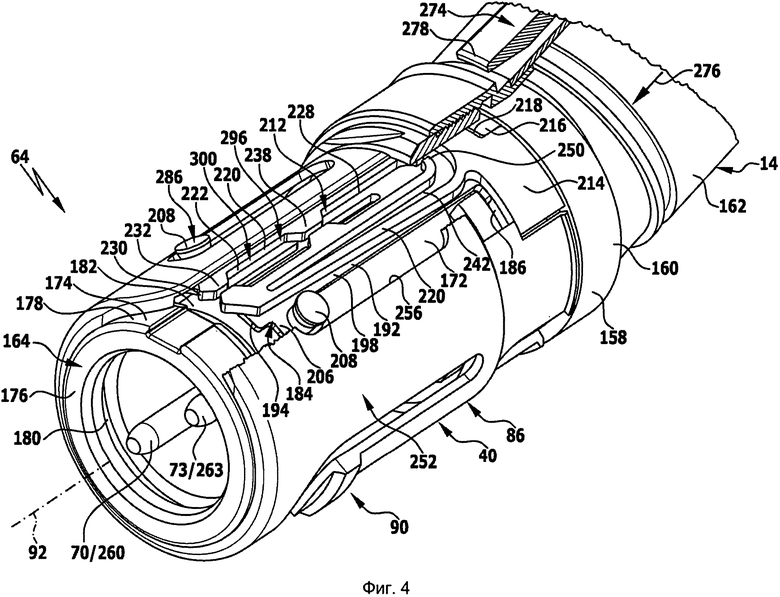

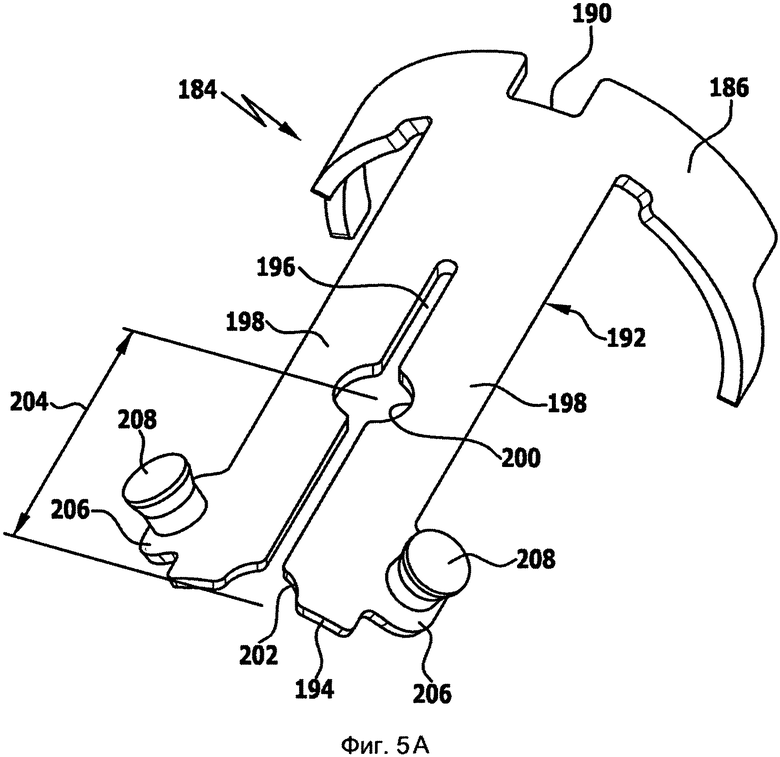

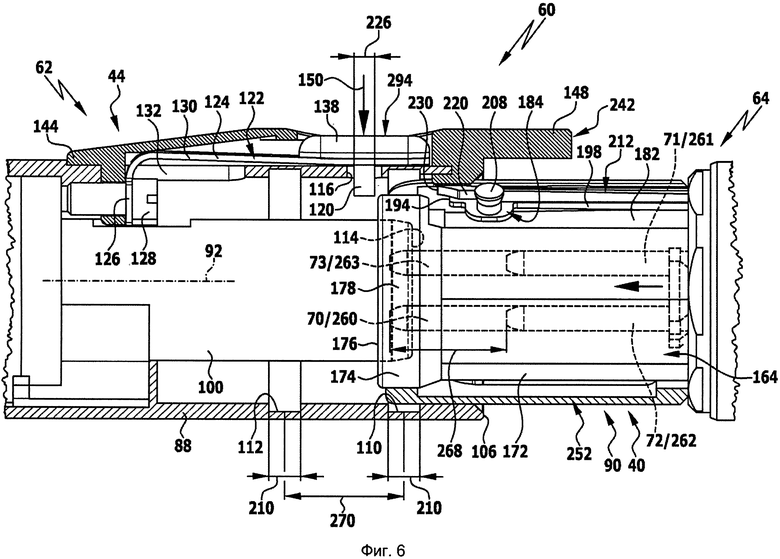
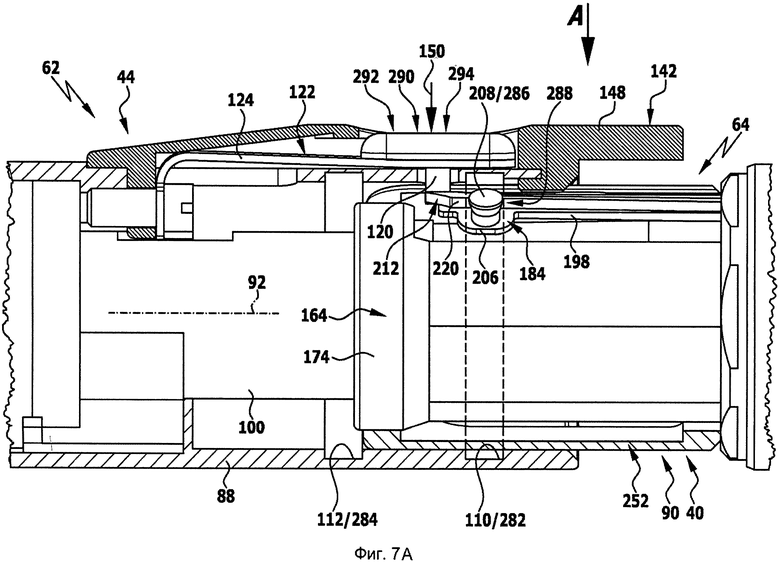
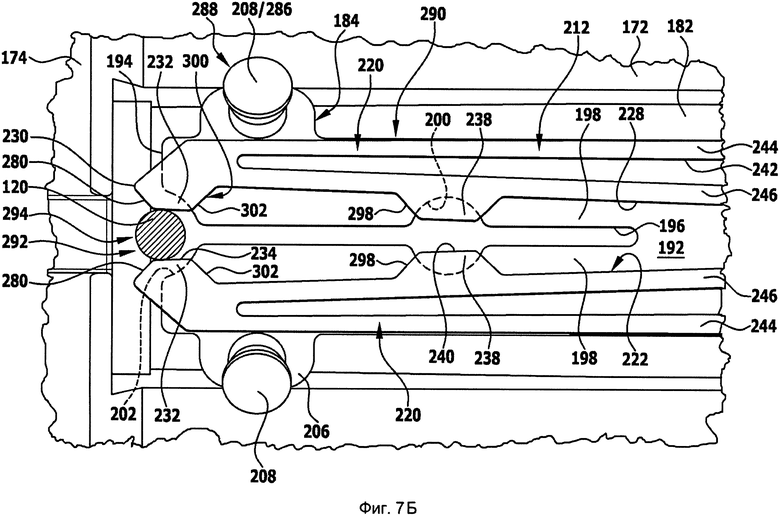
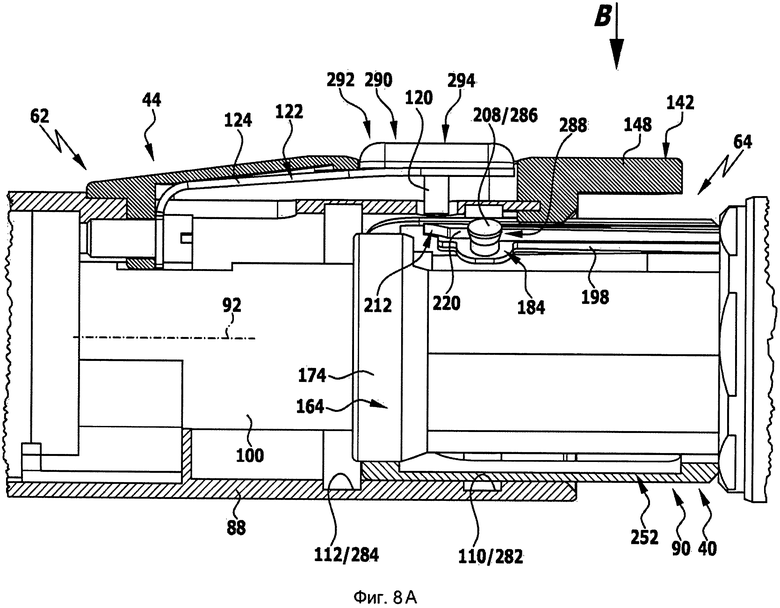
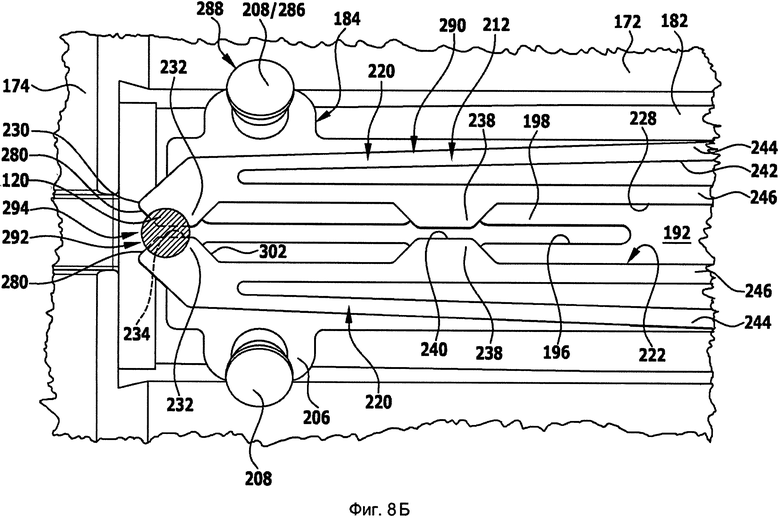
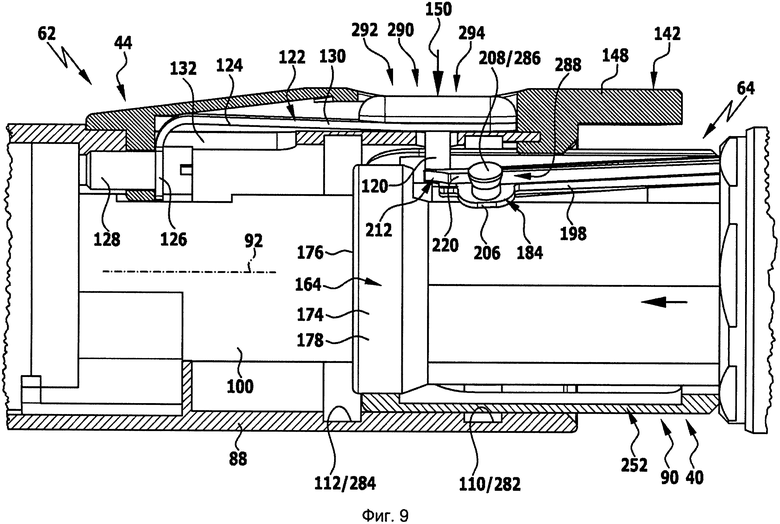
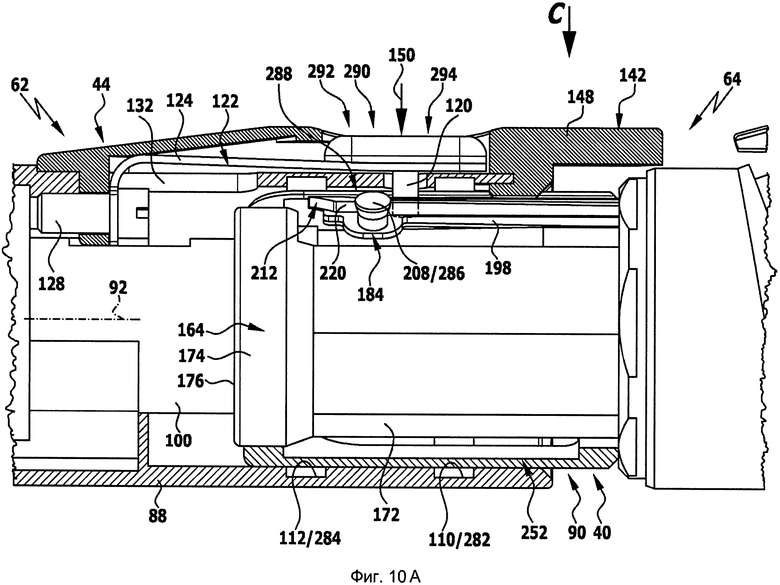
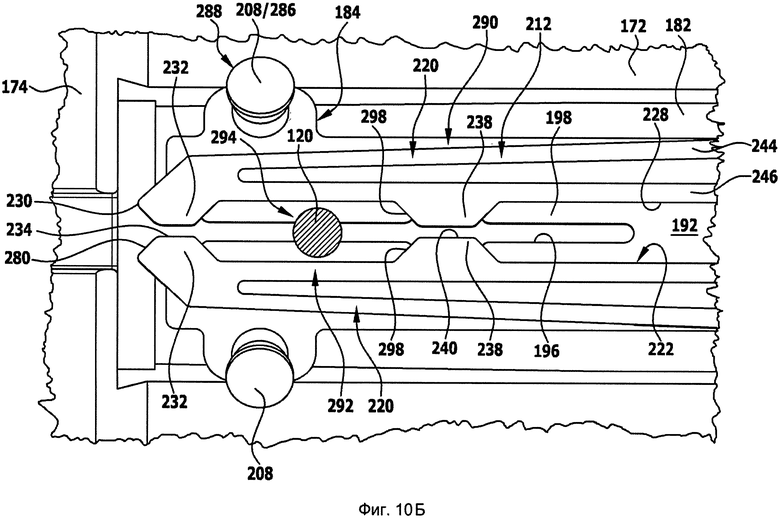
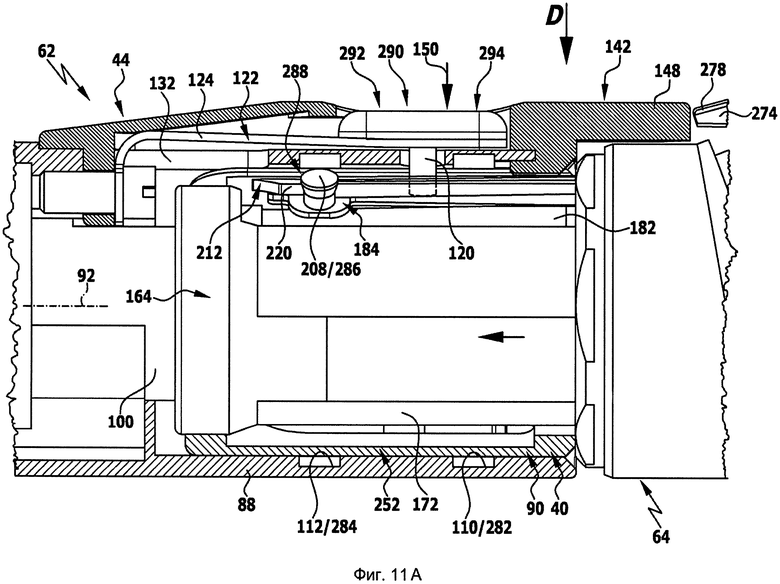
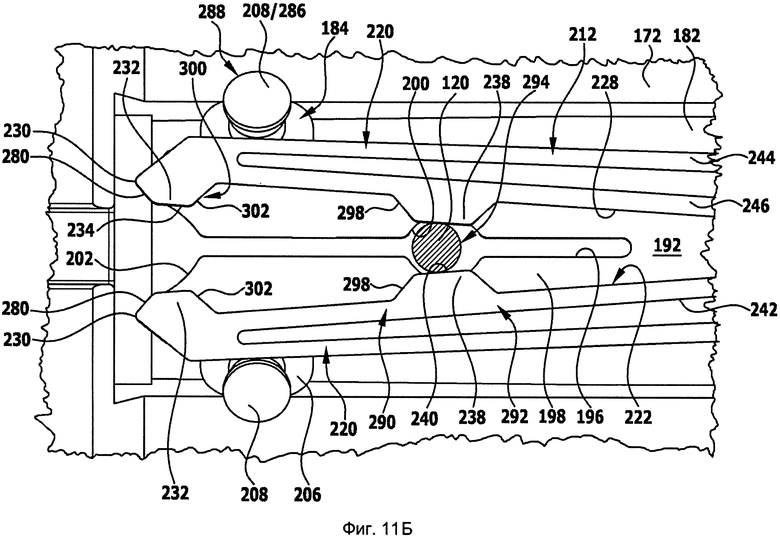
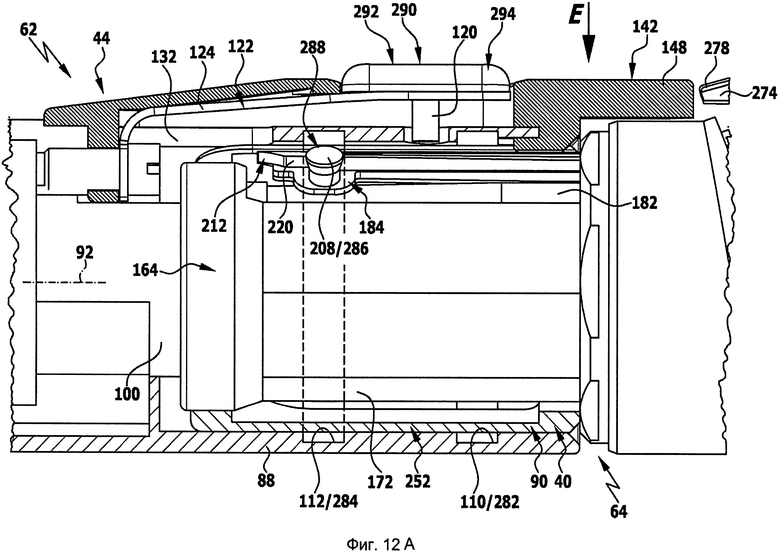
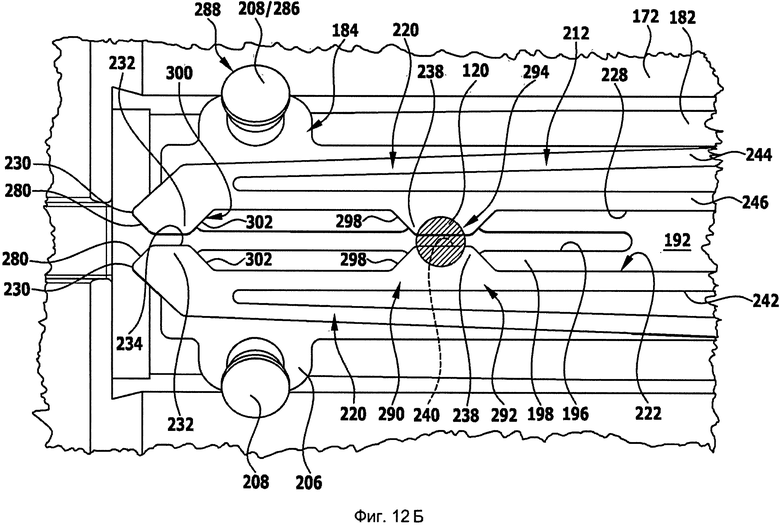
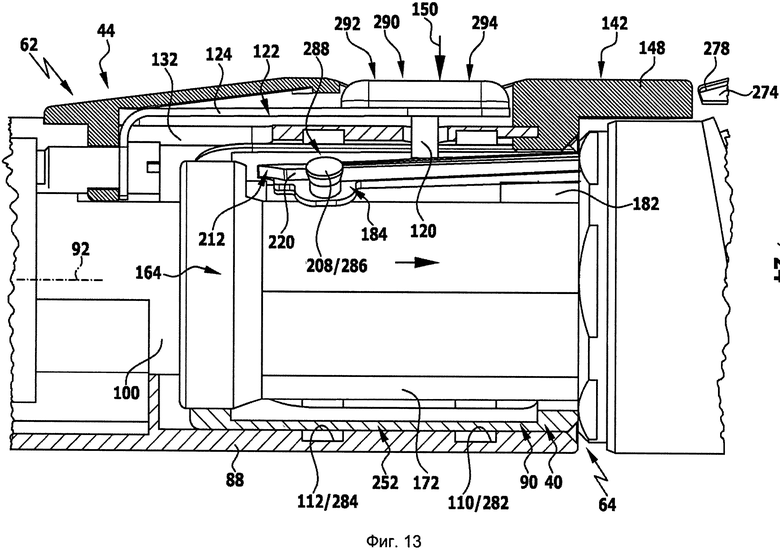
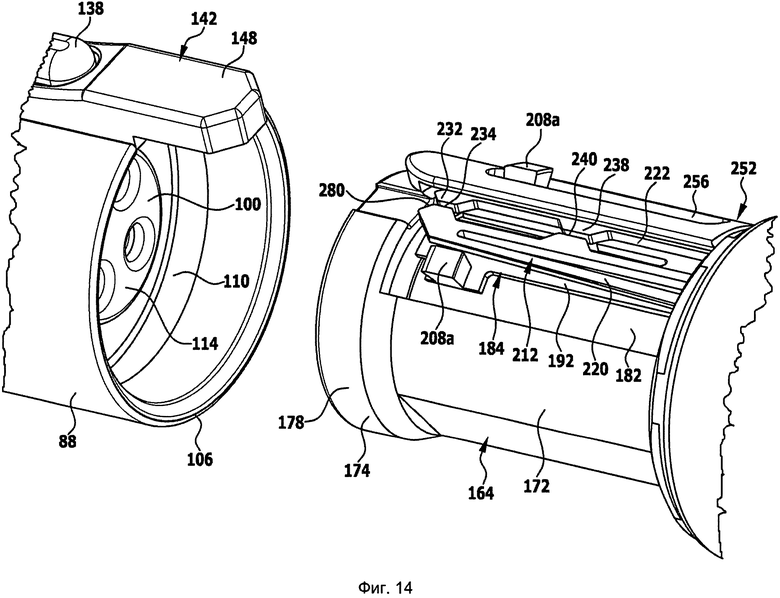

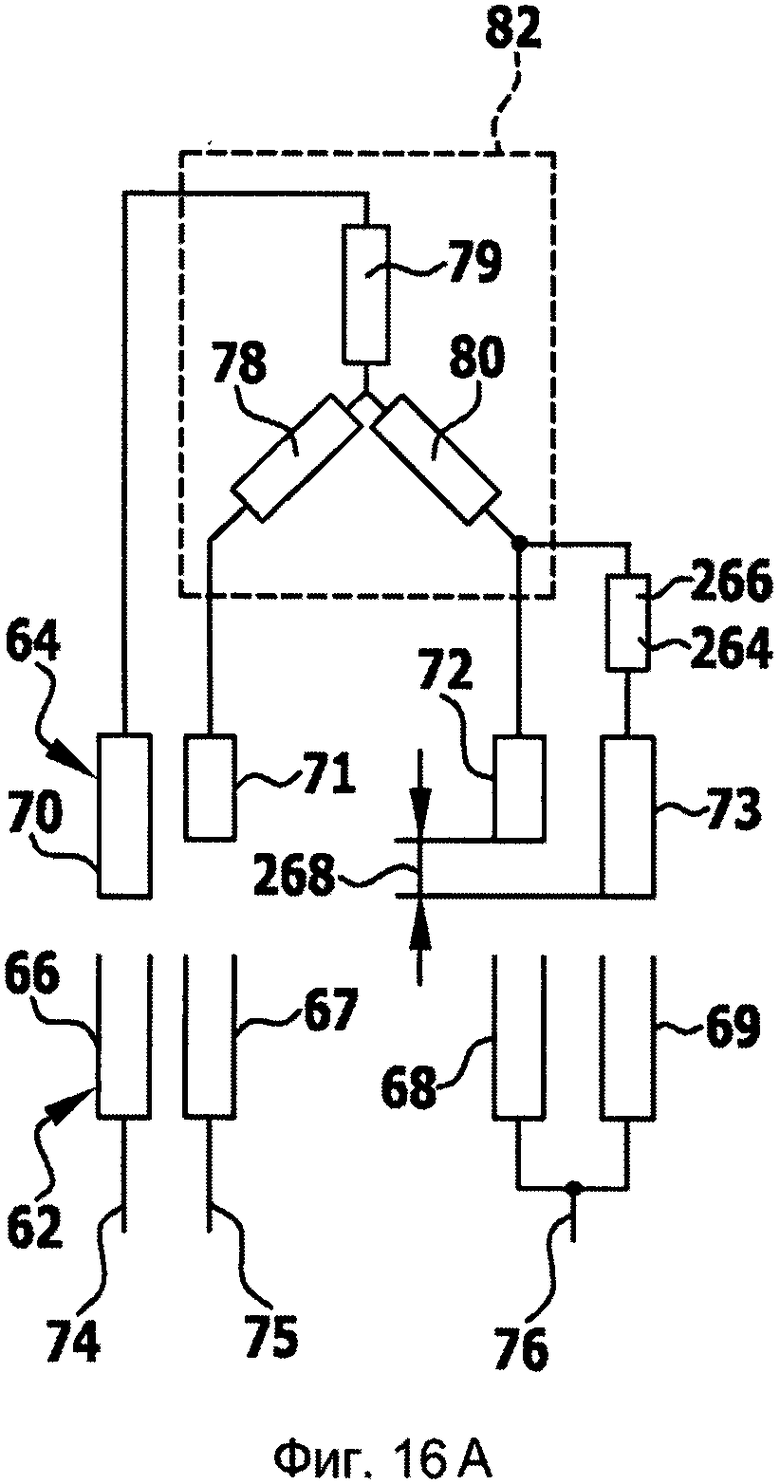
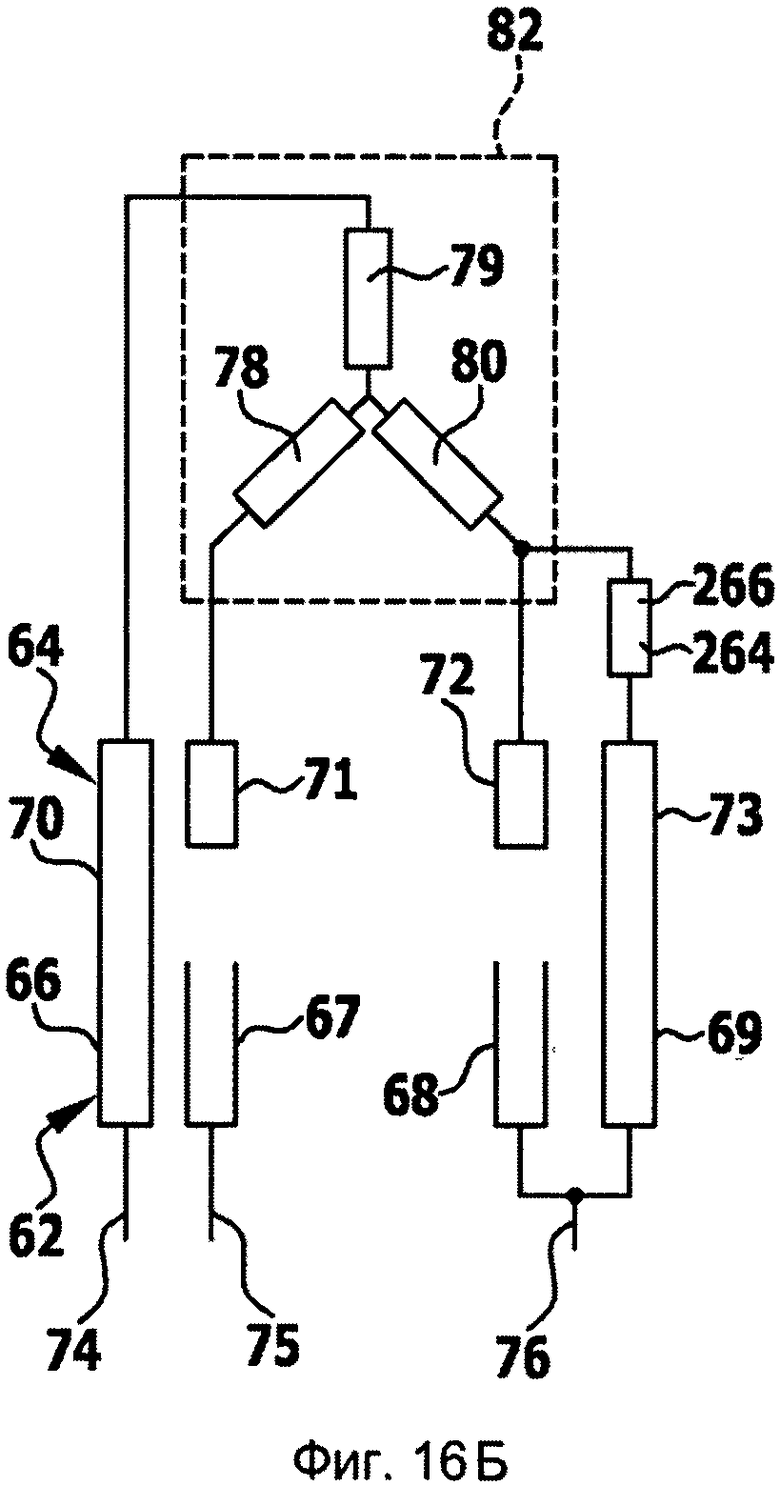
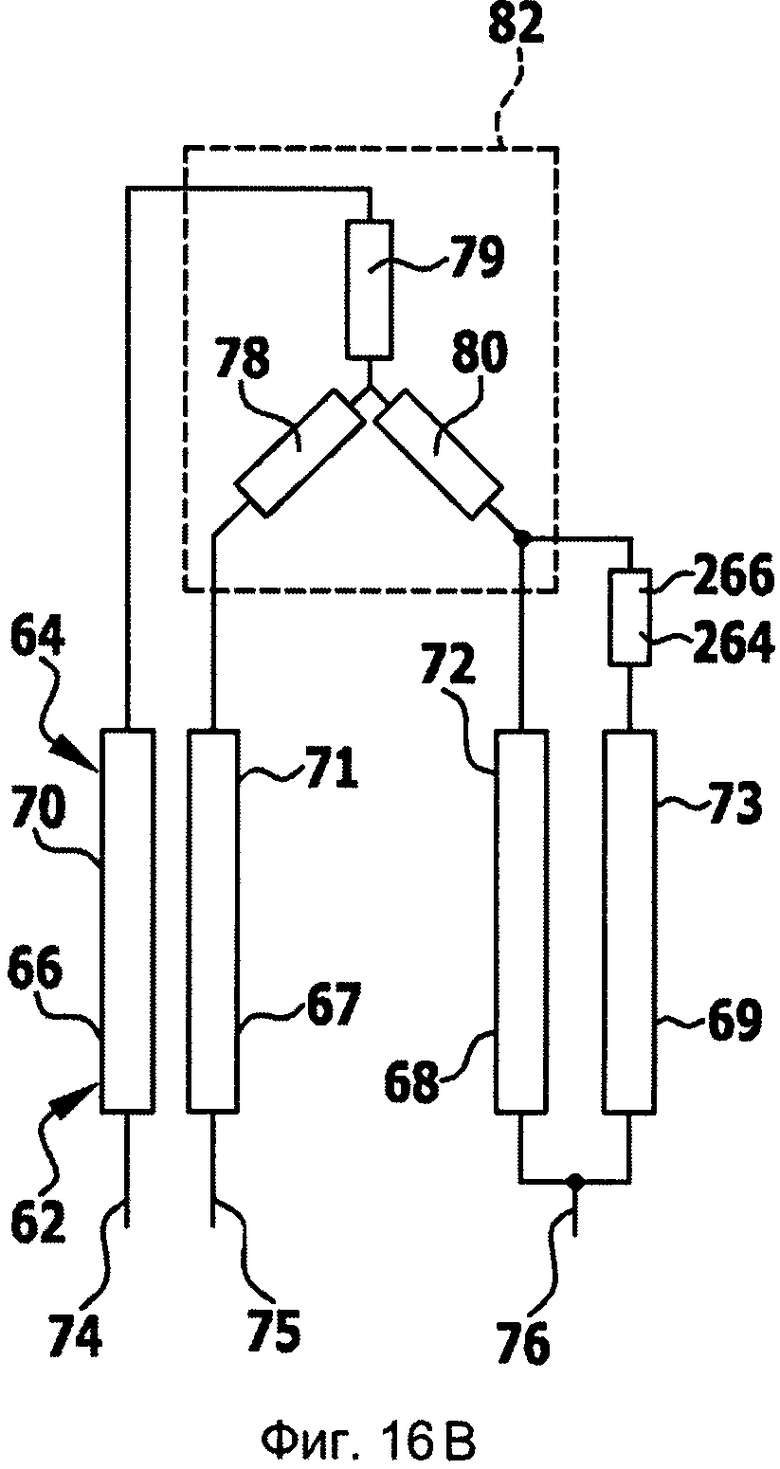
Изобретение относится к медицине. Хирургическая соединительная система включает первое хирургическое соединительное устройство и второе хирургическое соединительное устройство. В разобщенном положении устройства полностью отделены друг от друга, а в соединенном положении находятся в механическом зацеплении друг с другом. Коммутационное устройство в соединенном положении выполнено с возможностью переведения из положения выключения в положение включения. В положении выключения по меньшей мере один первый электрический соединительный контакт первого соединительного устройства не находится в зацеплении по меньшей мере с одним первым электрическим соединительным контактом второго соединительного устройства. В положение включения по меньшей мере один первый электрический соединительный контакт первого соединительного устройства и по меньшей мере один первый электрический соединительный контакт второго соединительного устройства находятся в проводящем электричество контакте или зацеплении, и/или наоборот. Технический результат - простота и надежность в обращении. 2 н. и 14 з.п. ф-лы, 16 ил.
1. Хирургическая соединительная система (60), включающая в себя первое хирургическое соединительное устройство (62) и второе хирургическое соединительное устройство (64) соответственно по меньшей мере с двумя выполненными с возможностью механического введения в зацепление друг с другом электрическими соединительными контактами (66, 67, 68, 69, 70, 71, 72, 73, 74), причем первое и второе соединительные устройства (62, 64) в разобщенном положении полностью отделены друг от друга, а в механически соединенном положении находятся в механическом зацеплении друг с другом, отличающаяся электрическим коммутационным устройством (292), которое в соединенном положении выполнено с возможностью переведения из положения выключения, в котором по меньшей мере один первый электрический соединительный контакт (67, 68) первого соединительного устройства (62) не находится в зацеплении по меньшей мере с одним первым электрическим соединительным контактом (71, 72) второго соединительного устройства (64), в положение включения, в котором по меньшей мере один первый электрический соединительный контакт (67, 68) первого соединительного устройства и по меньшей мере один первый электрический соединительный контакт (71, 72) второго соединительного устройства находятся в проводящем электричество контакте или зацеплении, или наоборот - из положения включения в положение выключения.
2. Соединительная система по п. 1, отличающаяся тем, что первое и второе соединительные устройства (62, 64) включают в себя соответственно по меньшей мере один второй электрический соединительный контакт (66, 69, 70, 73), и что вторые соединительные контакты (66, 69, 70, 73) в положении выключения и в положении включения находятся друг с другом в проводящем электричество контакте или зацеплении.
3. Соединительная система по п. 1, отличающаяся тем, что одно из двух соединительных устройств (62) включает в себя по меньшей мере один первый соединительный элемент (84), что другое из двух соединительных устройств (64) включает в себя по меньшей мере один второй соединительный элемент (86),
который выполнен соответствующим по меньшей мере одному первому соединительному элементу (84), и что по меньшей мере один первый и по меньшей мере один второй соединительный элемент (86) в соединенном положении находятся в зацеплении друг с другом.
4. Соединительная система по п. 1, отличающаяся фиксатором (290) коммутационного положения для механической фиксации коммутационного устройства (292) в положении включения и в положении выключения.
5. Соединительная система по п. 4, отличающаяся тем, что фиксатор (290) коммутационного устройства включает в себя блокирующее устройство (288) для механической блокировки занимающих соединенное положение первого и второго соединительных устройств (62, 64) в положении включения и в положении выключения, а также разобщающее устройство (294) для разобщения блокирующего устройства (288).
6. Соединительная система по п. 5, отличающаяся тем, что блокирующее устройство (288) включает в себя первый и второй блокирующие элементы (282, 284), а также третий блокирующий элемент (286), что первые и вторые блокирующие элементы (282, 284) расположены или выполнены на одном из обоих соединительных устройств (62, 64), что третий блокирующий элемент (286) расположен или выполнен на другом из обоих соединительных устройств (62, 64), и что первый и третий блокирующие элементы (284, 286) входят в зацепление в положении включения, и что второй и третий блокирующие элементы (282, 286) находятся в зацеплении в положении выключения.
7. Соединительная система по п. 6, отличающаяся тем, что блокирующее устройство (288) включает в себя устройство (296) предварительного натяжения для фиксации блокирующих элементов (282, 284, 286) в положении включения или же в положении выключения.
8. Соединительная система по п. 5, отличающаяся тем, что разобщающее устройство (294) включает в себя установленный с возможностью перемещения разобщающий элемент (120), который из неактивного положения является перемещаемым в активное положение и/или наоборот.
9. Соединительная система по п. 8, отличающаяся тем, что разобщающий элемент (120) выполнен с возможностью прямого или опосредованного вхождения в зацепление или в контакт с третьим блокирующим элементом (286) для перевода блокирующего устройства (288) из положения включения или из положения выключения в коммутационное положение.
10. Соединительная система по п. 9, отличающаяся тем, что разобщающее устройство (294) включает в себя по меньшей мере один механический управляющий элемент (212), который из положения захвата, в котором разобщающий элемент (120) при помощи управляющего элемента (212) является прямо или опосредовано вводимым в контакт или в зацепление с третьим блокирующим элементом (286) для перевода блокирующего устройства (288) из положения включения или из положения выключения в коммутационное положение, выполнен с возможностью приведения в разблокированное положение, в котором разобщающий элемент (120) не является прямо или опосредовано вводимым в контакт или в зацепление с третьим блокирующим элементом (286) для перевода блокирующего устройства (288) из положения включения или из положения выключения в коммутационное положение.
11. Соединительная система по п. 10, отличающаяся тем, что разобщающее устройство (294) выполнено таким образом, что разобщающий элемент (120) в активном положении переводит управляющий элемент (212) из положения захвата в разблокированное положение для предотвращения того, что разобщающий элемент (120) является прямо или опосредовано вводимым в зацепление или в контакт с третьим блокирующим элементом (286) для перевода блокирующего устройства (288) из положения включения или из положения выключения в коммутационное положение.
12. Соединительная система по п. 10, отличающаяся тем, что разобщающее устройство (294) выполнено таким образом, что управляющий элемент (212) является переводимым из разблокированного положения в положение захвата только за счет перевода разобщающего элемента (120) из активного положения в неактивное положение.
13. Соединительная система по п. 10, отличающаяся тем, что разобщающее устройство (294) выполнено таким образом, что разобщающий элемент (120) только в положении захвата выполнен с возможностью прямого или опосредованного вхождения в зацепление или в контакт с третьим блокирующим элементом (286) для перевода блокирующего устройства (288) из положения включения или из положения выключения в коммутационное положение.
14. Соединительная система по п. 10, отличающаяся тем, что разобщительное устройство (294) включает в себя устройство (220) возврата в исходное положение для автоматического перевода управляющего элемента (212) из разблокированного положения в положение захвата, как только разобщающий элемент (120) переводится из активного положения в неактивное положение.
15. Соединительная система по п. 2, отличающаяся тем, что первые электрические соединительные контакты (71, 72) короче, чем вторые электрические соединительные контакты (70, 73).
16. Хирургическая система (10) привода, включающая в себя по меньшей мере один хирургический наконечник (14) с приводом в форме электродвигателя (82) и по меньшей мере одну линию (20) электроснабжения, причем линия (20) электроснабжения имеет первый, выполненный с возможностью разобщаемого соединения по меньшей мере с одним наконечником (14) конец и второй, соединенный или выполненный с возможностью разобщаемого соединения с устройством (12) управления и/или регулирования для управления и/или регулирования электродвигателем (82) конец, отличающаяся соединительной системой (60) для электрического и механического соединения наконечника (14) и линии (20) электроснабжения по п. 1.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| US 3909506 A, 30.09.1975 | |||
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОНКОХИРУРГИИ | 2007 |
|
RU2354327C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| 0 |
|
SU164993A1 | |
| US 466690, 21.08.1984 | |||
| US 3234317 A, 21.08.1984 | |||

