УРОВЕНЬ ТЕХНИКИ
[0001] Подъемные системы зачастую содержат устройство удаленного отслеживания работы подъемника, связанное с другими устройствами, например, расположенными в местах, удаленных от местоположения подъемной системы. Устройства удаленного отслеживания работы подъемника предоставляют информацию, касающуюся работы подъемной системы или ее состояния, например, удаленно расположенным отслеживающим центрам. Устройства удаленного отслеживания работы подъемника также зачастую выполнены с возможностью обеспечения подачи на них команд и управляющих сигналов от удаленно расположенных устройств для управления работой подъемной системы.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0002] В одном из вариантов осуществления способ контроля за удаленным управлением подъемной системой включает предотвращение управления эксплуатацией подъемной системы любым источником, расположенным удаленно от местоположения подъемной системы, если есть индикация обслуживания подъемной системы механиком в настоящий момент.
[0003] В одном из вариантов осуществления подъемная система содержит устройство удаленного отслеживания работы подъемника, выполненное с возможностью предотвращения управления эксплуатацией подъемной системы любым источником, расположенным удаленно от местоположения подъемной системы, если есть индикация обслуживания подъемной системы механиком в настоящий момент.
[0004] Различные особенности и преимущества описанных примеров станут очевидны специалистам в данной области техники из следующего подробного описания. Сопроводительные чертежи могут быть кратко описаны следующим образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Фигура 1 схематически иллюстрирует отдельные части подъемной системы согласно варианту осуществления настоящего изобретения.
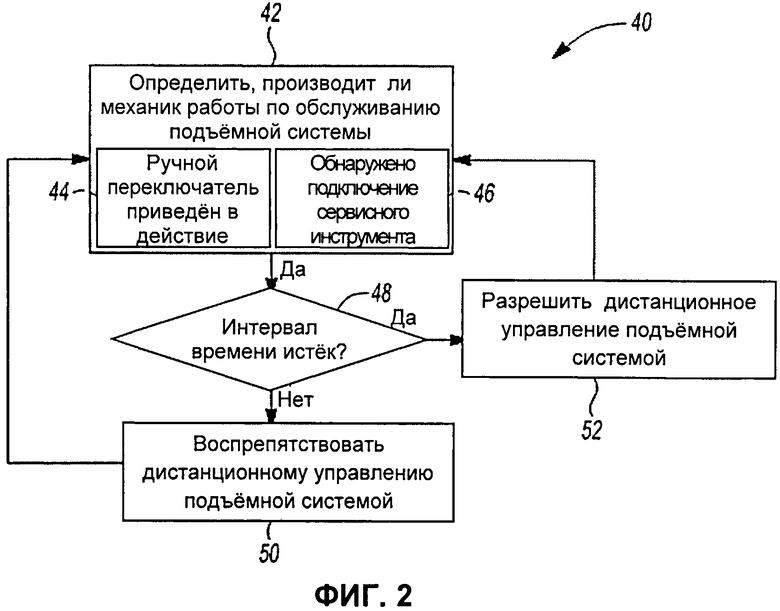
[0006] Фигура 2 показывает блок-схему, кратко описывающую примерный принцип работы, согласно варианту осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0007] Фигура 1 схематически показывает отдельные части подъемной системы 20. Кабина 22 подъемника расположена известным образом для обеспечения обслуживания подъемника. Управляющее устройство 24 подъемника управляет перемещением кабины 22 подъемника.
[0008] Устройство 26 удаленного отслеживания работы подъемника обеспечивает возможность связи по сети 28 связи между подъемной системой 20 и удаленно расположенными устройствами, такими как приведенное в качестве примера устройство 30 удаленного доступа. Устройство 26 удаленного отслеживания работы подъемника предоставляет информацию, касающуюся работы подъемной системы 20 или ее состояния, таким удаленно расположенным отслеживающим устройствам. Такие устройства удаленного отслеживания работы подъемника известны в данной области техники.
[0009] Приведенное в качестве примера устройство 26 удаленного отслеживания работы подъемника отличается тем, что оно контролирует, обеспечена ли возможность связи устройства 30 удаленного доступа с подъемной системой 20 для управления работой подъемной системы. Например, устройство 26 удаленного отслеживания работы подъемника выборочно предотвращает передачу команды, вызывающей перемещение кабины 22 подъемника, управляющему устройству 24 подъемника от любого устройства 30 удаленного доступа. Устройство 26 удаленного отслеживания работы подъемника предотвращает такую связь всякий раз, когда есть индикация, что механик 32 обслуживает подъемную систему 20. Таким образом, требуется ограничивать любое удаленное управление работой подъемной системы 20, если механик 32 проводит обслуживающую работу.
[00010] Пример на Фигуре 1 содержит ручной переключатель (MS) 34, связанный с устройством 26 удаленного отслеживания работы подъемника. Когда механик 32 находится возле подъемной системы 20 и намеревается начать ее обслуживание, он вручную приводит в действие переключатель 34. Устройство 26 удаленного отслеживания работы подъемника определяет состояние переключателя 34, который связан с устройством 26 удаленного отслеживания работы подъемника. В этом примере переключатель 34 расположен там же, где и устройство 26 удаленного отслеживания работы подъемника. Когда механик 32 вручную переводит переключатель 34 в положение, обеспечивающее индикацию того, что работа по обслуживанию происходит в настоящий момент, устройство 26 удаленного отслеживания работы подъемника определяет, что подъемная система 20 обслуживается механиком 32 в настоящий момент. Другими словами, переключатель 34 вручную приводится в действие механиком 32 для обеспечения индикации того, что работа по обслуживанию происходит в настоящий момент.
[00011] Пример на Фигуре 1 также выполнен с возможностью определения обслуживания подъемной системы механиком в настоящий момент посредством обнаружения, что механик 32 использует обслуживающее приспособление 35 тем же способом, как оно предположительно и должно быть использовано во время обслуживания подъемника. В этом примере порт (CP) 36 связи выполнен с возможностью соединения с приспособлением 35 для обслуживания. Другими словами, механик 32 может вручную подключить соединитель между приспособлением 35 для обслуживания и портом 36 связи, что позволит механику проводить различные операции по обслуживанию. В этом примере устройство 26 удаленного отслеживания работы подъемника обнаруживает, что установлено соединение с портом 36 связи, и использует этот факт в качестве индикации начала работы по обслуживанию. В таком примере, даже если переключатель 34 не был вручную приведен в действие, определение наличия соединения с портом 36 связи позволяет устройству 26 удаленного отслеживания работы подъемника определить, что работа по обслуживанию происходит в настоящий момент.
[00012] Пример на Фигуре 1 также обеспечивает возможность приспособлению 35 для обслуживания представлять собой устройство связи, связывающееся беспроводным образом с приемопередающим устройством 38, выполненным с возможностью приема таких беспроводных сигналов. В этом примере приемопередающее устройство 38 связано с устройством 26 удаленного отслеживания работы подъемника таким способом, который позволяет ему использовать прием сигнала приемопередающим устройством 38 в качестве индикации обслуживания подъемной системы 20 механиком в настоящий момент.
[00013] Некоторые варианты осуществления изобретения будут содержать только ручной переключатель 34 для обеспечения индикации обслуживания подъемной системы механиком в настоящий момент. Другие варианты будут содержать только приемопередающее устройство 38 или порт 36 связи для обеспечения индикации обслуживания подъемной системы в настоящий момент. Тем не менее, другие варианты будут содержать комбинацию двух или более из следующего: ручной переключатель 34, порт 36 связи и приемопередающее устройство 38, обеспечивающие возможность устройству 26 удаленного отслеживания работы подъемника определять, когда механик обслуживает подъемную систему.
[00014] Фигура 2 показывает блок-схему (40), кратко описывающую примерный принцип контроля за удаленным управлением подъемной системой. На этапе 42 определяется, производит ли механик работы по обслуживанию подъемной системы. Это определение осуществляется, например, устройством 26 удаленного отслеживания работы подъемника. На Фигуре 2 показано, что существует возможность определения, что механик производит работы по обслуживанию подъемной системы, посредством обнаружения, приводился ли ручной переключатель в действие (44). Дополнительно, существует возможность обнаружения наличия приспособления для обслуживания в (46) посредством обнаружения беспроводной связи такого приспособления или обнаружения, что такое приспособление было, например, соединено с портом связи подъемной системы.
[00015] Если существует индикация, что механик обслуживает подъемную систему, то на этапе 48 определяют, истек ли предварительно заданный промежуток времени. В этом примере устройство 26 удаленного отслеживания работы подъемника начинает промежуток времени в ответ на получение индикации, что механик 32 намеревается начать обслуживание подъемной системы. В одном из вариантов предварительно заданный промежуток времени эквивалентен нормальному рабочему дню порядка восьми или девяти часов. Эта особенность позволяет разрешить ситуацию, в которой механик 32 вручную приводит в действие переключатель 34, например, в начале проведения работ по обслуживанию и затем покидает местоположение подъемной системы, не сбросив переключатель 34 для индикации завершения работы по обслуживанию.
[00016] Если существует индикация, что подъемная система обслуживается в настоящий момент, а предварительно заданный промежуток времени еще не истек, то на этапе 50 устройство 26 удаленного отслеживания работы подъемника предотвращает удаленное управление работой подъемника. В некоторых вариантах указанная индикация предотвратит любое удаленное управление, происходящее в настоящий момент, которое, возможно, запустилось прежде, чем механик приступил к обслуживанию. Другими словами, решение предотвратить удаленное управление работой подъемника может быть принято в любое время, когда механик начинает или продолжает работы по обслуживанию, вне зависимости от текущего состояния подъемной системы. В одном из вариантов устройство 26 удаленного отслеживания работы подъемника отфильтровывает любые управляющие сигналы от устройства 30 удаленного доступа, которые получены по сети 28 связи, чтобы любые такие управляющие сигналы не оказывали никакого влияния на работу подъемной системы.
[00017] На Фигуре 2, если на этапе 48 промежуток времени истек, то удаленное управление работой подъемника разрешается (52). Данная особенность позволяет восстановить нормальную удаленную связь через устройство 26 удаленного отслеживания работы подъемника после истечения промежутка времени, достаточного для того, чтобы механик завершил обслуживание подъемной системы или по меньшей мере временно приостановил проведение работ по обслуживанию с тем, чтобы вернуться к работе на следующий день. Конечно, если механик возвратится на следующий день, то устройство 26 удаленного отслеживания работы подъемника получит от механика новую индикацию от механика о том, что намечено проведение работ по обслуживанию. В таком случае устройство 26 удаленного отслеживания работы подъемника сбросит таймер для заранее заданного промежутка времени и предотвратит удаленное управление подъемной системой по меньшей мере на тот промежуток времени, если только механик не представит индикацию того, что проведение работ по обслуживанию завершено до истечения того промежутка времени.
[00018] В одном из вариантов этапом 52 предусмотрено ограничение числа используемых источников удаленного управления в определенный момент времени. К примеру, если один авторизованный источник команд удаленного управления (например, устройство 30 удаленного доступа) управляет работой подъемника, то возможность другого устройства удаленного управления управлять подъемной системой ограничивается или предотвращается полностью. В некоторых вариантах только одно устройство удаленного доступа может быть использовано в данный момент времени. В других вариантах команды отдает только одно устройство удаленного доступа, в то время как другое может быть использовано для отслеживания работы подъемной системы.
[00019] Приведенное в качестве примера устройство 26 удаленного отслеживания работы подъемника сохраняет информацию о состоянии подъемной системы для контроля, разрешено ли устройству удаленного доступа управлять работой подъемной системы. Всякий раз, когда устройство 26 удаленного отслеживания работы подъемника определяет, что подъемная система в настоящее время обслуживается механиком, устройство 26 удаленного отслеживания работы подъемника предотвращает удаленное управление подъемной системой.
[00020] Предыдущее описание является лишь примером осуществления настоящего изобретения, но никак его не ограничивает. Изменения и дополнения к описанным примерам, не выходящие за пределы существа настоящего изобретения, могут быть очевидны специалистам в данной области техники. Пределы правовой защиты настоящего изобретения могут быть определены только на основании следующей формулы изобретения.
При контроле за удаленным управлением подъемной системой (20) предотвращают управление эксплуатацией подъемной системы (20) любым источником (30), расположенным удаленно от местоположения подъемной системы, если есть индикация обслуживания подъемной системы (20) механиком (32) в настоящий момент. Определяют, истек ли предварительно заданный промежуток времени после первого появления указанной индикации. Выполняют указанное предотвращение, если индикация существует, а интервал времени еще не истек, и отменяют указанное предотвращение, если указанный промежуток времени истек, даже если индикация все еще существует. Предложена также подъемная система. Всякий раз, когда устройство (26) удаленного отслеживания работы подъемника определяет, что подъемная система (20) в настоящее время обслуживается механиком (32), устройство (26) удаленного отслеживания работы подъемника предотвращает удаленное управление подъемной системой (20). 2 н. и 15 з.п. ф-лы, 2 ил.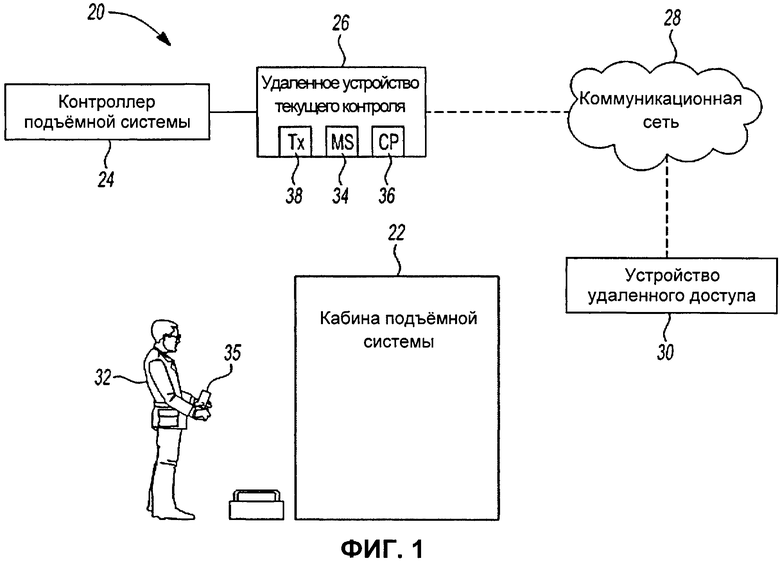
1. Способ контроля за удаленным управлением подъемной системой, согласно которому:
предотвращают управление эксплуатацией подъемной системы любым источником, расположенным удаленно от местоположения подъемной системы, если есть индикация обслуживания подъемной системы механиком в настоящий момент,
определяют, истек ли предварительно заданный промежуток времени после первого появления указанной индикации,
выполняют указанное предотвращение, если индикация существует, а интервал времени еще не истек, и
отменяют указанное предотвращение, если указанный промежуток времени истек, даже если индикация все еще существует.
2. Способ по п. 1, согласно которому определяют, был ли механиком вручную приведен в действие переключатель, обеспечивающий индикацию обслуживания подъемной системы механиком в настоящий момент.
3. Способ по п. 1, согласно которому определяют, было ли приспособление механика для обслуживания соединено с частью подъемной системы, обеспечивая индикацию обслуживания подъемной системы механиком в настоящий момент.
4. Способ по п. 3, согласно которому часть подъемной системы содержит порт, выполненный с возможностью соединения с приспособлением для обслуживания.
5. Способ по п. 4, согласно которому часть подъемной системы содержит устройство удаленного отслеживания работы подъемника, которое включает в себя указанный порт.
6. Способ по п. 1, согласно которому определяют, использовал ли механик устройство связи для связи беспроводным образом с частью подъемной системы.
7. Способ по п. 6, согласно которому часть подъемной системы содержит приемопередающее устройство, выполненное с возможностью связи с устройством связи, выполненным с возможностью обеспечения механику возможности обслуживания подъемной системы.
8. Способ по п. 7, согласно которому часть подъемной системы содержит устройство удаленного отслеживания работы подъемника, содержащее приемопередающее устройство.
9. Способ по п. 1, согласно которому
начинают указанный промежуток времени в ответ по меньшей мере на одно из следующего:
(i) механик вручную приводит в действие переключатель, обеспечивающий индикацию,
(ii) механик соединяет приспособление для обслуживания с частью подъемной системы, или
(iii) механик использует устройство связи для связи беспроводным образом с частью подъемной системы.
10. Подъемная система, содержащая:
устройство для удаленного отслеживания работы подъемника, выполненное с возможностью:
предотвращения управления эксплуатацией подъемной системы любым источником, расположенным удаленно от места подъемной системы, если есть индикация обслуживания подъемной системы механиком в настоящий момент,
начинания предварительно заданного промежутка времени в ответ на начало индикации,
предотвращения управления эксплуатацией подъемной системы любым источником, расположенным удаленно от местоположения подъемной системы, если существует указанная индикация, а указанный промежуток времени еще не истек, и
отмены индикации для обеспечения источнику, расположенному удаленно от подъемной системы, возможности управления эксплуатацией подъемной системы, когда промежуток времени истек, даже если указанная индикация все еще существует.
11. Система по п. 10, содержащая:
переключатель, выполненный с возможностью
ручного приведения в действие механиком и обеспечивающий индикацию обслуживания подъемной системы механиком в настоящий момент.
12. Система по п. 11, в которой переключатель связан с устройством удаленного отслеживания работы подъемника.
13. Система по п. 10, содержащая порт на части подъемной системы, выполненный с возможностью соединения с приспособлением для обслуживания, и в которой механик, соединяющий приспособление для обслуживания с портом, обеспечивает индикацию обслуживания подъемной системы механиком в настоящий момент.
14. Система по п. 13, в которой устройство удаленного отслеживания работы подъемника содержит указанный порт.
15. Система по п. 10, содержащая приемопередающее устройство, выполненное с возможностью связи с устройством связи, выполненным для обеспечения механику возможности обслуживания подъемной системы, и в которой приемопередающее устройство обеспечивает индикацию в ответ на получение сообщения, переданного беспроводным образом, от устройства связи.
16. Система по п. 15, в которой устройство удаленного отслеживания работы подъемника содержит указанное приемопередающее устройство.
17. Система по п. 10, в которой устройство удаленного отслеживания работы подъемника выполнено с возможностью автоматического начала промежутка времени в ответ по меньшей мере на одно из следующего:
(i) механик вручную приводит в действие переключатель, обеспечивающий индикацию,
(ii) механик соединяет приспособление для обслуживания с частью подъемной системы, или
(iii) механик использует устройство связи для связи беспроводным образом с частью подъемной системы.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| ЛИФТОВАЯ УСТАНОВКА И СПОСОБ ОСУЩЕСТВЛЕНИЯ ПОТЕНЦИАЛЬНО КОРРЕКТИРУЮЩЕЙ ОПЕРАЦИИ В ОТНОШЕНИИ НЕЕ | 2005 |
|
RU2368563C2 |

