ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к дистанционно взаимодействующим транспортным средствам, а конкретнее к системам и способам для дистанционно взаимодействующих транспортных средств.
УРОВЕНЬ ТЕХНИКИ
Системы для дистанционно взаимодействующих транспортных средств имеют все возрастающее значение, благодаря их способности принимать участие в выполнении боевых задач от рекогносцировки местности до сбора разведывательной информации для наступательных операций. Одна из конфигураций, часто применяемая в системах дистанционно управляемых транспортных средств, предусматривает потоковое видео, передаваемое в режиме реального времени от транспортного средства до платформы оператора. Оператор рассматривает поступающую видеоинформацию и посылает команды обратно на транспортное средство, исходя из просмотренной видеоинформации. Хотя такая конфигурация предоставляет удаленному оператору идеальную возможность рассматривать в режиме реального времени истинную окружающую обстановку, в которой транспортное средство действует, в этой конфигурации часто возникают проблемы с неконтролируемой задержкой и для нее требуется значительная полоса пропускания, что в значительной степени затрудняет работу в режиме реального времени.
Задержка - это отрезок времени, включающий: время, необходимое транспортному средству для сбора, шифровки и передачи потока видеоданных от транспортного средства удаленному оператору, время, необходимое оператору для выдачи управляющих входных данных, а также время, необходимое транспортному средству для приема управляющих входных данных от удаленного оператора и ответной реакции на них. Задержка может привести к нежелательным эффектам, таким как отклонение транспортного средства от заданной траектории. Например, во время разведки наблюдением, если транспортное средство передает видеосигнал с задержкой в пять секунд и находится в двух секундах от заданной точки наблюдения, то оператору будет слишком поздно наблюдать задержанную видеоинформацию и выдать управляющие входные данные для исполнения, когда транспортное средство проходит над точкой наблюдения. В результате, оператор будет постоянно стараться компенсировать задержку вместо того, чтобы управлять транспортным средством в режиме реального времени.
Другой пример влияния задержки - это когда транспортное средство измеряет свои координаты и ориентацию, как в случае с глобальной системой позиционирования (GPS), дополненной инерциальным навигационным блоком (INU). Кинематические данные, такие как координаты, ориентация, скорости и ускорения транспортного средства являются достоверными только для того момента времени, когда они были получены, но к тому времени, когда данные передаются и рассматриваются оператором, транспортное средство уйдет за пределы переданных координат. Таким образом, оператор будет подавать управляющие входные данные со старыми кинематическими данными, необязательно основанными на состоянии транспортного средства на тот момент времени, когда управляющие входные данные были получены. Это может привести к нежелательным эффектам типа раскачки самолета пилотом. Задержка в передаче кинематических данных может также помешать совместной работе транспортных средств. Например, транспортные средства, летящие в плотном строю, могут обмениваться кинематическими данными друг с другом так, чтобы их системы управления могли постоянно адаптироваться к поддержанию заданного строя. Однако если кинематические данные поступают с задержкой, то каждая система управления транспортным средством будет основывать свои вычисления на старых кинематических данных, необязательно представляющих состояние других транспортных средств на момент выполнения вычислений. Влияние задержки в передаче кинематических данных может привести к необходимости расстановки транспортных средств в строю подальше друг от друга, чем это предусмотрено, для компенсации эффектов задержки в передаче кинематических данных или в связи с риском столкновений транспортных средств между собой или с объектами окружающей среды. В дополнение к задержке, часто конфигурации видеопотока также требуют значительной полосы пропускания. Высокое качество видеопотока может потребовать полосу пропускания в один мегабит в секунду или более. Такая полоса пропускания часто облагается налогом на каналы связи между транспортными средствами и удаленными операторами. Несколько систем беспилотного транспортного средства могут действовать совместно, как например в группе. Несколько видеопотоков могут увеличить требуемую ширину полосы пропускания до неконтролируемых размеров.
Альтернативная конфигурация для дистанционно управляемых систем транспортного средства включает сжатие видеопотоков для снижения требований к полосе пропускания. Хотя сжатие видеопотоков эффективно снижает требования к полосе пропускания, но затраты времени на сжатие и восстановление для такой конфигурации может увеличить задержку на несколько секунд или более. Эта дополнительная задержка может усложнить дистанционное управление транспортным средством.
Другая альтернативная конфигурация для дистанционно управляемых систем транспортного средства включает привязку транспортного средства к дистанционному оператору. Привязка транспортного средства обеспечивает эффективный прямой канал связи транспортного средства с оператором и может предоставить достаточную полосу пропускания с минимальной задержкой, что обеспечивает эффективную работу транспортного средства с привязкой. Однако в такой конфигурации работа транспортного средства с привязкой ограничена длиной связи, которая значительно сужает круг задач, решаемых транспортным средством, а также ограничивает возможности транспортных средств и операторов для совместной работы с другими транспортными средствами и операторами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Раскрыты способы и системы конфигурации для управления системами транспортного средства. В одном варианте воплощения способ дистанционного управления транспортным средством включает расчет местоположения (вычисление координат) транспортного средства. По алгоритму расчета местоположения можно рассчитать местоположение транспортного средства. Пакет данных о местоположении, принятый от транспортного средства, можно применить для обновления расчетного местоположения транспортного средства. По обновленным вычисленным координатам транспортного средства можно вывести на дисплей виртуальное изображение транспортного средства. По выведенному виртуальному изображению транспортного средства можно передавать на транспортное средство сигналы управления.
В другом варианте воплощения способ передачи координат транспортного средства включает расчет местоположения транспортного средства и получение фактического местоположения транспортного средства. Если разность между расчетным и фактическим местоположением транспортного средства превышает установленный порог, то транспортное средство может сгенерировать и передать пакет данных о местоположении, включающий ориентационные и кинематические данные транспортного средства.
В другом варианте воплощения конфигурация системы дистанционно управляемого транспортного средства может включать дистанционно управляемое транспортное средство и удаленного (дистанционного) оператора. Дистанционно управляемое транспортное средство может включать модуль расчета местоположения для расчета местоположения транспортного средства. Дистанционно управляемое транспортное средство может также включать модуль определения местоположения для определения фактического местоположения транспортного средства. Когда разность между расчетным и фактическим местоположением транспортного средства превышает пороговое значение отклонения местоположения, может быть сгенерирован и передан пакет координатных данных. Платформа удаленного оператора может включать модуль расчета местоположения, модуль обновления местоположения, модуль отображения (модуль дисплея) и командный модуль. Оператор посредством модуля расчета местоположения может рассчитать местоположение транспортного средства. Модуль обновления местоположения может обновить расчетное местоположение транспортного средства, когда от транспортного средства передан пакет данных о местоположении. На модуль дисплея можно вывести виртуальное изображение транспортного средства по обновленному расчетному местоположению транспортного средства. Командный модуль может передать одну или более команд на транспортное средство.
В другом варианте воплощения конфигурация системы дистанционно управляемого транспортного средства может включать по меньшей мере два взаимодействующих дистанционно управляемых транспортных средства. Транспортные средства могут включать модуль расчета местоположения, модуль определения местоположения, модуль передачи, модуль обновления местоположения, командный модуль и управляющий модуль. Модуль расчета местоположения может рассчитывать местоположение каждого из по меньшей мере двух взаимодействующих дистанционно управляемых транспортных средств. Каждое дистанционно управляемое транспортное средство может получить свое реальное местоположение посредством модуля определения местоположения. Коммуникационный модуль отслеживает разность между расчетным и фактическим местоположением и, когда эта разность превышает пороговое значение отклонения местоположения, может передать пакет данных о местоположении каждому из взаимодействующих дистанционно управляемых транспортных средств. Модуль обновления местоположения может обновить расчетное местоположение каждого из взаимодействующих дистанционно управляемых транспортных средств, исходя из пакета данных о местоположении. Командный модуль может принять одну или более оперативных команд от удаленного оператора или обменяться оперативными командами с другими транспортными средствами. Управляющий модуль может использовать расчетное местоположения транспортного средства и виртуальное изображение окружающей обстановки (среды) для управления функциями транспортного средства.
Особенности, функции и преимущества могут быть независимо достигнуты в различных вариантах воплощения данного изобретения или может комбинироваться в других вариантах воплощения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Подробное описание дано со ссылкой на прилагаемые чертежи. В чертежах крайняя левая цифра(ы) ссылочной позиции определяет чертеж, в котором ссылочная позиция впервые появляется. Одинаковые ссылочные позиции на разных чертежах указывают на похожие или одинаковые элементы.
Фиг.1 - комбинированная структурно-функциональная схема конфигурации системы для дистанционно управляемых транспортных средств.
Фиг.2 - структурная схема, представляющая дополнительные элементы модулей определения местоположения для дистанционно управляемой системы.
Фиг.3 - структурная схема, представляющая дополнительные элементы модулей отслеживания местоположения для дистанционно управляемой системы.
Фиг.4 - функциональная схема, представляющая процесс передачи местоположения транспортного средства.
Фиг.5 - функциональная схема, представляющая процесс отображения местоположения транспортного средства.
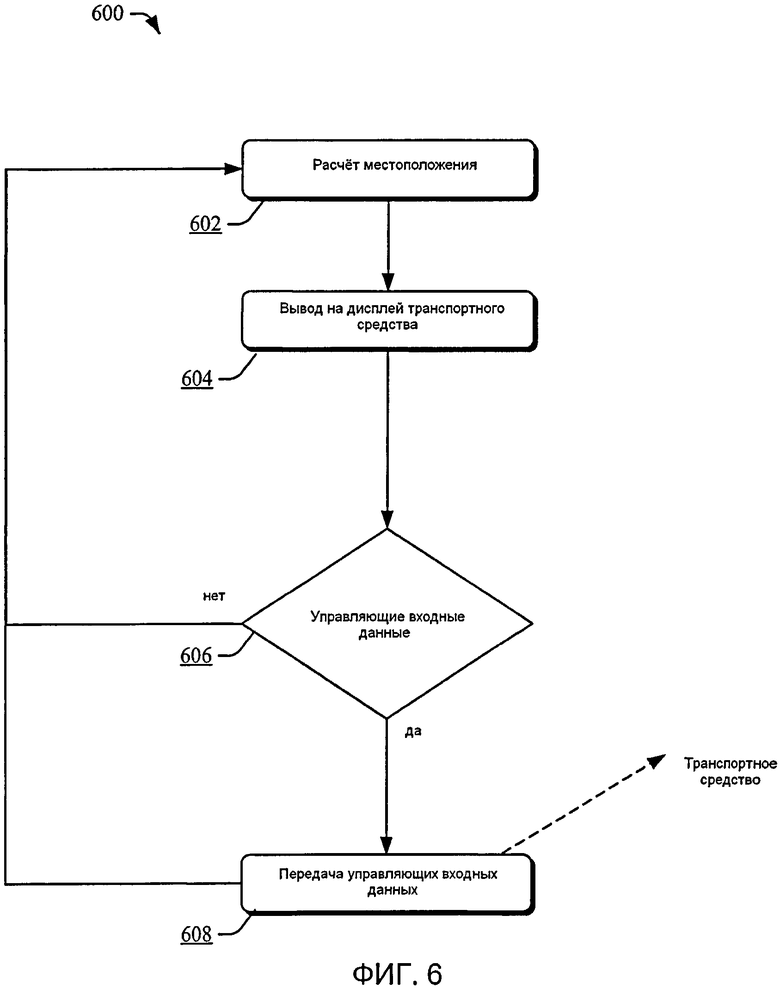
Фиг.6 - функциональная схема, представляющая процесс управления транспортным средством.
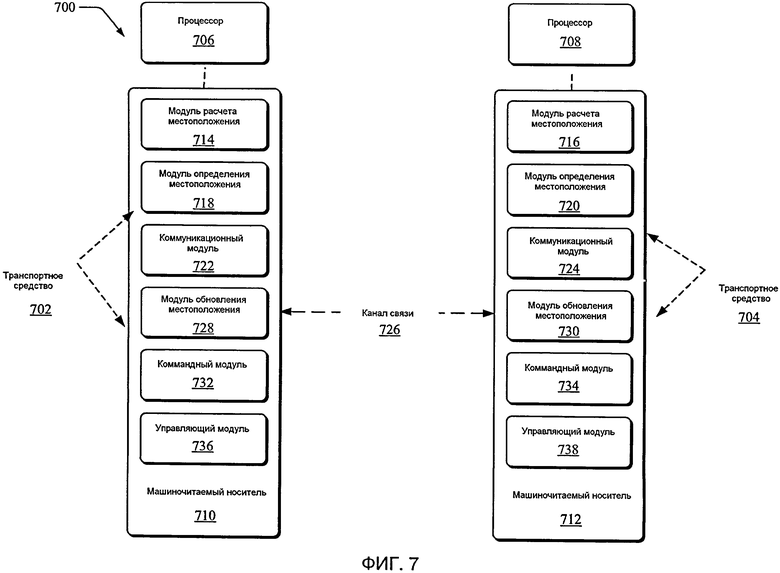
Фиг.7 - комбинированная структурно-функциональная схема конфигурации системы для совместно управляемого множества дистанционно управляемых транспортных средств.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Обзор
Как отмечалось выше, проблемы задержки и пропускной способности, связанные с потоковым видео в режиме реального времени, в значительной степени снижают возможность надежного дистанционного управления системами транспортного средства. В настоящем изобретении раскрыты усовершенствованные технологии дистанционного управления транспортными средствами без необходимости передавать потоковое видео в режиме реального времени. Некоторые технологии включают стандартный алгоритм позиционирования для расчета местоположения транспортного средства. По этому стандартному алгоритму позиционирования можно рассчитать местоположение транспортного средства, не запрашивая никакое потоковое видео в режиме реального времени в качестве входных данных. В других технологиях предусмотрена передача реального местоположения от системы транспортного средства, только когда расчетное местоположение транспортного средства отличаются от реального местоположения транспортного средства по меньшей мере на величину установленного порога. Визуализация транспортного средства, действующего в рабочей среде, может быть осуществлена без потокового видео, переданного от транспортного средства в режиме реального времени, а путем вывода на экран виртуального изображения транспортного средства вместе с виртуальными изображениями окружающей среды, в которой транспортное средство действует. К транспортным средствам, в которые можно внедрить технологии, описанные здесь, относятся все без исключения летательные аппараты, морские суда, космические аппараты, автомобили, механические устройства и другие транспортные средства или системы с дистанционным управлением.
На фиг.1 представлена конфигурация 100 системы для дистанционно управляемых транспортных средств. Конфигурация 100 системы может включать дистанционно управляемое транспортное средство 102 и удаленного оператора 104. Дистанционно управляемое транспортное средство 102 может быть любым транспортным средством, управляемым дистанционно, таким как летательный аппарат, морское судно, космический аппарат, автомобиль и тому подобное. Понятно, что внедрением конфигурации 100 системы может быть охвачено любое число похожих и разных транспортных средств, хотя для удобства изложения на фиг.1 показано только одно воздушное транспортное средство.
В общем, дистанционно управляемое транспортное средство 102 и удаленный оператор 104 могут быть системами на компьютерной основе, которые включают один или более процессоров. На фиг.1 показан процессор 106 транспортного средства, относящийся к дистанционно управляемому транспортному средству 102, и процессор 108 оператора, относящийся к удаленному оператору 104. Дистанционно управляемое транспортное средство 102 и удаленный оператор 104 могут включать один или более экземпляров машиночитаемых носителей информации, которые связаны с компьютером. Как представлено на фиг.1, дистанционно управляемое транспортное средство 102 может содержать машиночитаемый носитель 110 транспортного средства, а удаленный оператор 104 может содержать машиночитаемый носитель 112 оператора. Машиночитаемые носители 110 и 112 могут содержать инструкции, причем их исполнение процессором приводит к выполнению любых инструментальных средств или связанных функций, описанных здесь. Процессор может быть сконфигурирован на выборку и/или исполнение инструкций, записанных или закодированных на машиночитаемом носителе 110 и 112. Процессор может быть также классифицирован или охарактеризован, как имеющий заданную конфигурацию. Процессоры могут быть разных типов в зависимости от дистанционно управляемого транспортного средства 102. Понятно, что транспортное средство 102 может быть распределено, например процессор 106 транспортного средства и связанные с ним модули могут находиться за пределами платформы транспортного средства, как например на земле, и в них могут быть задействованы дистанционные следящие системы, такие как лазерные, СИД, инфракрасные, ультрафиолетовые, радиочастотные или электромагнитные, для отслеживания платформы транспортного средства, когда условия, такие как ограничения по весу и питанию, наложенные на платформу транспортного средства вынуждают применять конфигурацию распределенной системы транспортного средства.
Канал связи 114 может предоставить двустороннюю связь между дистанционно управляемым транспортным средством 102 и удаленным оператором 104. Хотя связь обозначена только одной стрелкой, но может быть обеспечена и многоканальная связь. В одном варианте воплощения канал связи 114 может соединить дистанционно управляемое транспортное средство 102 с удаленным оператором 104 без прохождения коммуникационных линий через промежуточную сеть. Варианты технологий, подходящих для внедрения таких коммуникационных линий, включают технологии Bluetooth и WiFi, но не ограничиваются ими. В альтернативном варианте воплощения канал связи 114 может предоставить соединение дистанционно управляемого транспортного средства 102 с удаленным оператором 104 через некоторую промежуточную сеть или предоставленную связь и/или через службу, поддерживаемую третьей стороной.
Хотя на фиг.1 показано только одно транспортное средство, но если предусмотрено несколько транспортных средств, то канал связи 114 может обеспечить соединение между разными транспортными средствами, а также с удаленным оператором 104.
Машиночитаемый носитель 110 транспортного средства может включать модуль 116 определения и передачи местоположения транспортного средства. Как описано далее со ссылкой на фиг.2, применение модуля 116 определения и передачи местоположения успешно исключает необходимость в потоковом видео, передаваемом в режиме реального времени от дистанционно управляемого транспортного средства 102. Например, модуль 116 определения и передачи местоположения передает местоположения дистанционно управляемого транспортного средства 102, только когда реальное местоположение дистанционно управляемого транспортного средства 102 отличаются от расчетного местоположения дистанционно управляемого транспортного средства 102 на величину, большую порогового значения. Модуль 116 определения и передачи местоположения может быть воплощен в виде одного или более программных модулей, которые при их загрузке в процессор 106 транспортного средства и выполнении приведут к исполнению дистанционно управляемым транспортным средством 102 различных функций, описанных здесь.
Машиночитаемый носитель 110 транспортного средства может также включать один или несколько экземпляров базы данных измерений транспортного средства 118 для хранения измерений окружающей среды. База данных измерений транспортного средства 118 может быть предварительно записана на машиночитаемый носитель или она может быть загружена из центрального хранилища 120. В процессе работы в дистанционно управляемом транспортном средстве 102 можно задействовать один или более дальномеров (не показаны) для измерения показателей окружающей среды. Модуль сравнения измерений 122 может сравнить проведенные измерения окружающей среды с одним или более измерениями в базе данных измерений транспортного средства 118. Если дистанционно управляемое транспортное средство 102 выполняет измерение окружающей среды и его показание не коррелирует с базой данных измерений транспортного средства 118, то можно обновить базу данных измерений транспортного средства 118, чтобы добиться корреляции с измерением датчика.
Например, дальномер (не показан) может показать расстояние до поверхности земли равное 37 метрам вдоль азимута и угол места дальномера, но вдоль того же самого азимута и том же угле места в базе данных измерений транспортного средства может оказаться расстояние до поверхности земли, равное 40 метрам, поэтому два расстояния не коррелируют и, если координаты транспортного средства и ориентация датчика являются точными, то земля должна иметь более высокое положение в той точке, которая заносилась в базу данных измерений транспортного средства для данной позиции. Таким образом, точка может быть внесена в базу данных положения земли, отражая самые последние доступные данные рельефа земли для данной позиции. Дополнительные измерения дальности, проведенные в том же окружении, дадут дополнительные точки, которые могут обеспечить высокую точность изображения земли в базе данных измерений транспортного средства. Существуют многочисленные методы внесения, которые можно применить: добавление полигонов поверхности, если система базы данных поддерживает дополнение элемента, или изменение координат, связанных с существующими полигонами поверхности, чтобы отразить более свежие данные о поверхности земли, если система базы данных не принимает дополнительные элементы.
В другом примере дальномеры могут включать устройство захвата изображения (видеодатчик) (не показано). Модуль 122 сравнения измерений может сравнить изображения окружающей среды, полученных от устройства захвата изображения, с одним или более изображениями из базы данных измерений транспортного средства 118. В одном варианте воплощения модуль 122 сравнения измерений сравнивает захваченные реальные изображения окружающей среды с одним или более захваченными изображениями из базы данных измерений транспортного средства 118. Альтернативно модуль 122 сравнения измерений может сравнить захваченные реальные изображения окружающей среды с одним или более виртуальными представлениями изображений из базы данных измерений транспортного средства 118. Если захваченное изображение отличается от изображений в базе данных измерений транспортного средства 118 или если захваченное изображение не существует в базе данных измерений транспортного средства 118, то дистанционно управляемое транспортное средство 102 может сохранить захваченное изображение в базе данных измерений транспортного средства 118. В одном варианте воплощения дистанционно управляемое транспортное средство 102 сохраняет захваченное изображение в базе данных измерений транспортного средства 118 как реальное изображение. Альтернативно, дистанционно управляемое транспортное средство 102 сохраняет виртуальное представление захваченного изображения в базе данных измерений транспортного средства 118, основываясь на позиции и ориентации дальномера и на пересечении с объектами в поле зрения датчика по линии визирования. Альтернативно дистанционно управляемое транспортное средство 102 может хранить как реальное изображение, так и виртуальное представление захваченного изображения в базе данных измерений транспортного средства 118. Независимо от типа сохраненного измерения, как только дистанционно управляемое транспортное средство 102 обновит базу данных измерений транспортного средства 118, дистанционно управляемое транспортное средство 102 может обновить централизованное хранилище 120 для отражения только что добавленных измерений. В одном варианте воплощения дистанционно управляемое транспортное средство 102 может послать сообщение об обновлении хранилища, чтобы известить другие платформы о том, что центральное хранилище содержит обновленные измерения. Например, дистанционно управляемое транспортное средство 102 может послать сообщение об обновлении хранилища дистанционному оператору 104. Дистанционно управляемое транспортное средство 102 может послать сообщение об обновлении хранилища дистанционному оператору 104 через канал связи 114. Альтернативно дистанционно управляемое транспортное средство 102 может послать сообщение об обновлении хранилища дистанционному оператору 104 через коммуникационные средства, отличные от канала связи 114. Хотя на фиг.1 показано только одно транспортное средство, но если задействовано несколько транспортных средств, то дистанционно управляемое транспортное средство 102 может послать сообщение об обновлении хранилища другим транспортным средствам либо в дополнение, либо вместо передачи сообщения об обновлении хранилища удаленному оператору 104.
На той же фиг.1 машиночитаемый носитель 112 оператора может включать модуль 124 отслеживания местоположения. Как описано далее со ссылкой на фиг.3, модуль 124 отслеживания местоположения отслеживает местоположение дистанционно управляемого транспортного средства 102 без применения потокового видео, передаваемого в режиме реального времени от дистанционно управляемого транспортного средства 102. Один или более программных модулей могут включать модуль 124 отслеживания местоположения, так что при загрузке его в процессор 106 транспортного средства и исполнении, дистанционный оператор 104 выполняет различные функции, описанные здесь.
Машиночитаемый носитель оператора 112 может также включать один или более экземпляров базы данных 126 виртуальной окружающей среды для хранения измерений окружающей среды транспортного средства. База данных виртуальной окружающей среды 126 может быть предварительно записана на машиночитаемый носитель оператора или может быть загружена из центрального хранилища 120. В процессе работы удаленный оператор 104 может обновить базу данных виртуальной окружающей среды 126 путем загрузки данных из центрального хранилища 120. Например, удаленный оператор 104 может загрузить данные из центрального хранилища 120 в процессе работы, получив сообщение об обновлении хранилища от дистанционно управляемого транспортного средства 102, как отмечалось выше.
Машиночитаемый носитель оператора 112 может дополнительно включать модуль дисплея 128 для визуализации виртуального представления дистанционно управляемого транспортного средства 102 на дисплее (не показан). Модуль дисплея 128 может отображать виртуальное представление дистанционно управляемого транспортного средства 102 по местоположению дистанционно управляемого транспортного средства 102, определенным в модуле отслеживания местоположения 124. В дополнение, модуль дисплея 128 может извлечь одно или более измерений из базы данных виртуальной окружающей среды 126 для отображения на дисплее совместно с виртуальным представлением дистанционно управляемого транспортного средства 102. Например, модуль дисплея 128 может извлечь один или более измерений окружающей среды транспортного средства для их отображения в соответствии с позицией дистанционно управляемого транспортного средства 102, которая указана в модуле 124 отслеживания местоположения.
Отображение виртуального представления дистанционно управляемого транспортного средства 102 вместе с виртуальным представлением окружающей среды транспортного средства эффективно обеспечивает отображение дистанционно управляемого транспортного средства 102 без применения потокового видео, передаваемого в режиме реального времени от дистанционно управляемого транспортного средства 102. В дополнение, модуль 128 дисплея эффективно обеспечивает отображение дистанционно управляемого транспортного средства 102 в любой проекции. Например, на дисплее можно отобразить дистанционно управляемое транспортное средство 102 издали для ориентирования в ситуации, т.е. вид через плечо, или отобразить вид из кабины дистанционно управляемого транспортного средства 102, т.е. виртуальный «пилот». Хотя на фиг.1 показано только одно транспортное средство, но может быть предусмотрено и несколько транспортных средств. Если предусмотрено несколько транспортных средств, то модуль 128 дисплея может отобразить на дисплее одно или более транспортных средств одновременно. Альтернативно, несколько транспортных средств могут быть отображены на нескольких дисплеях.
На той же фиг.1, машиночитаемый носитель оператора 112 может дополнительно включать командный модуль 130 для передачи одной или более управляющих команд на дистанционно управляемое транспортное средство 102. В одном варианте воплощения пользователь дисплея вручную вводит одну или несколько команд для того, чтобы командный модуль 130 передал их на дистанционно управляемое транспортное средство 102. Например, пользователь дисплея может передать управляющие команды на поворот, вираж и/или разгон на дистанционно управляемое транспортное средство. В альтернативном варианте воплощения предусмотрен автоматический способ передачи одного или более команд на командный модуль 130 для передачи их на дистанционно управляемое транспортное средство 102.
В одном варианте воплощения командный модуль 130 передает команды на дистанционно управляемое транспортное средство 102 по каналу 114 связи. Хотя на фиг.1 показано только одно транспортное средство, но может быть предусмотрено и несколько транспортных средств. Если предусмотрено несколько транспортных средств, то командный модуль 130 может передать команды на одно или более транспортных средств. В одном варианте воплощения командный модуль 130 передает одну или более одинаковых команд на несколько транспортных средств, так что несколько транспортных средств движутся синхронно друг с другом. Альтернативно, командный модуль 130 может передать индивидуальные команды на каждое из нескольких транспортных средств, для независимого управления каждым из них. Эти типы команд могут включать такие команды, как непосредственное управление транспортным средством, корректировка точек следуемого маршрута или корректировка правил, которым транспортное средство может следовать для автономного или совместного принятия решений.
Один или более программных модулей могут включать модуль 128 дисплея и командный модуль 130, так что при загрузке их в процессор 108 удаленного оператора и выполнении, удаленный оператор 104 исполнит различные функции, описанные здесь.
Модуль определения и передачи местоположения
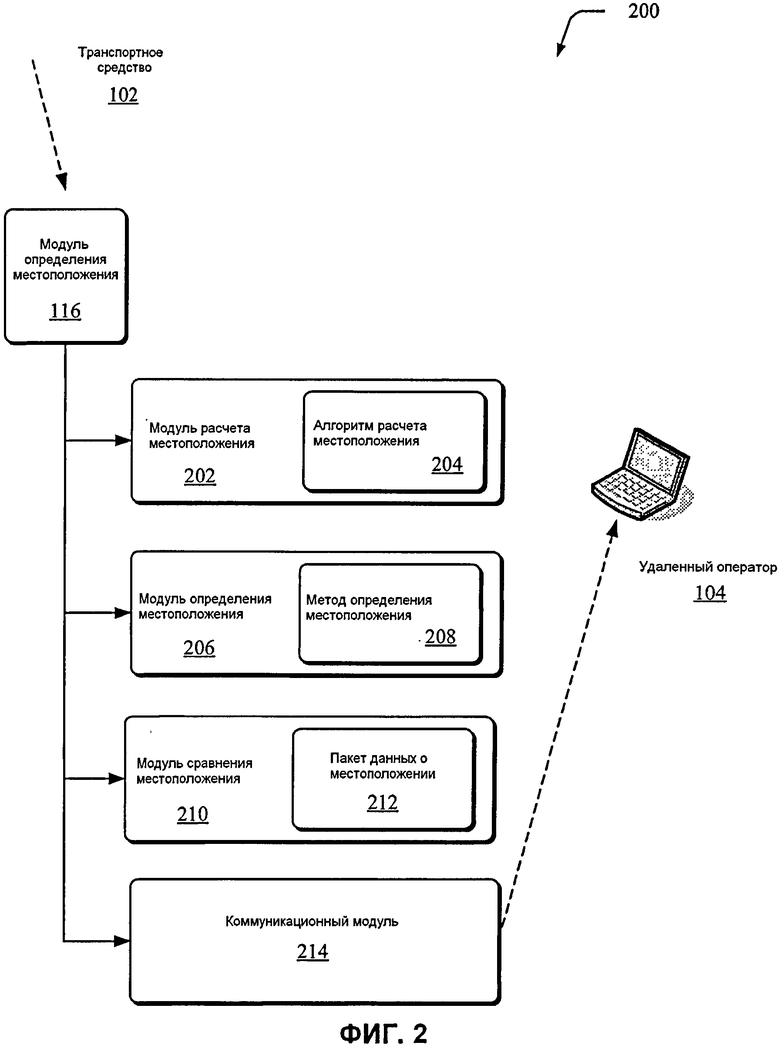
На фиг.2 представлена структура 200 модуля определения и передачи местоположения 116 для дистанционно управляемых транспортных средств. Как отмечено выше, модуль определения и передачи местоположения 116 постоянно определяет местоположение дистанционно управляемого транспортного средства 102, но передает их только тогда, когда реальное местоположения дистанционно управляемого транспортного средства 102 отличаются от расчетного местоположения дистанционно управляемого транспортного средства 102 на величину, большую порогового значения.
Как показано на фиг.2, модуль определения и передачи местоположения 116 может включать модуль расчета местоположения 202 транспортного средства, который может рассчитывать местоположение транспортного средства по алгоритму расчета местоположения 204. Модуль определения и передачи местоположения 116 может дополнительно включать модуль определения местоположения 206, который может по методу определения местоположения 208 определить реальное местоположения транспортного средства. Модуль определения и передачи местоположения 116 может дополнительно включать модуль сравнения местоположения 210 для генерации пакета 212 данных о местоположении, исходя из результатов сравнения расчетного и реального местоположения транспортного средства. Модуль определения и передачи местоположения 116 может дополнительно включать модуль 214 передачи для передачи пакета данных о местоположении.
В модуле расчета местоположения 202 транспортного средства можно применить любой алгоритм расчета местоположения 204 для расчета местоположения транспортного средства. В одном неограничивающем варианте воплощения в алгоритме расчета местоположения 204 можно применить алгоритм навигационного счисления (счисления координат) для расчета местоположения дистанционно управляемого транспортного средства 102. В таком варианте воплощения при помощи алгоритма навигационного счисления можно рассчитать местоположение дистанционно управляемого транспортного средства по ориентационным и кинематическим данным, полученным от транспортного средства. В одном варианте воплощения модуль расчета местоположения 202 транспортного средства непрерывно рассчитывает местоположение дистанционно управляемого транспортного средства 102.
В модуле определения местоположения 206 можно применить любой метод определения местоположения 208. В одном неограничивающем варианте воплощения в методе определения местоположения 208 можно применить систему глобального позиционирования (GPS) для определения местоположения транспортного средства.
На той же фиг.2 модуль сравнения местоположения 210 может сравнить расчетное местоположение с реальным местоположением. Если разность между расчетным и реальным местоположением превышает установленный порог, то модуль сравнения местоположения 210 может сформировать пакет данных о местоположении 212. В одном варианте воплощения пакет данных о местоположении 212 может содержать текущие ориентационные и кинематические данные транспортного средства, включая линейную и угловую скорость и ускорение. Пакет 212 данных о местоположении может дополнительно включать метку времени, отражающую время, когда пакет 212 данных о местоположении предполагается представить. Эта метка может быть текущим временем генерации пакета данных в модуле сравнения местоположения, но она может также включать такой опережающий временной интервал, чтобы пакет данных о местоположении представлял местоположение транспортного средства немного позже времени генерации для компенсации задержки при передаче получателю, например удаленному оператору 104.
После генерации пакета данных о местоположении 212 модуль определения и передачи местоположения 116 может передать пакет данных о местоположении через 214. В одном варианте воплощения модуль определения и передачи местоположения 116 передает пакет данных о местоположении через 214 удаленному оператору 104 по фиг.1 по каналу 114 связи. Если задействовано несколько транспортных средств, то модуль определения и передачи местоположения 116 может передать пакет данных о местоположении одному или более другим транспортным средствам через 214. Например, модуль определения и передачи местоположения 116 может передать пакет данных о местоположении через 214 одному или более другим транспортным средствам одновременно с передачей пакета данных о местоположении удаленному оператору.
Модуль отслеживания местоположения
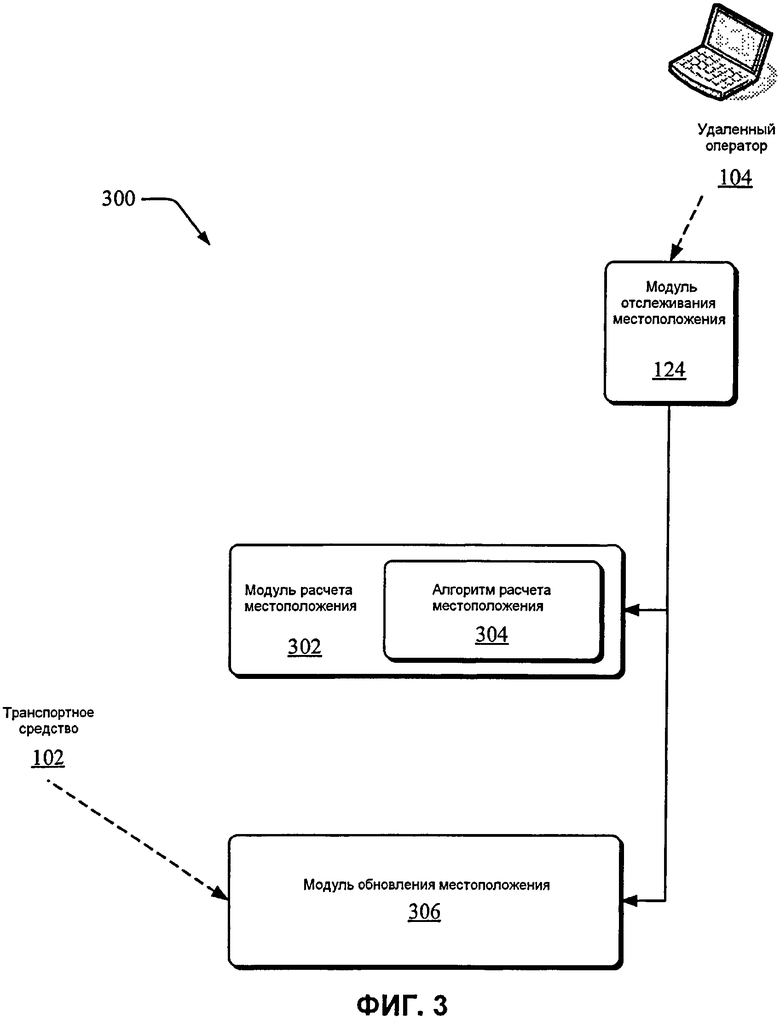
На фиг.3 представлены дополнительные элементы 300 модуля отслеживания местоположения 124 для внедрения конфигурации системы в дистанционно управляемые транспортные средства. Как отмечено выше, модуль отслеживания местоположения 124 отслеживает местоположение дистанционно управляемого транспортного средства 102 без применения потокового видео, передаваемого в режиме реального времени от дистанционно управляемого транспортного средства 102.
Как показано на фиг.3, модуль отслеживания местоположения 124 может содержать оператор, расположенный в модуле расчета местоположения 302. В операторе, расположенном в модуле расчета местоположения 302, может быть реализован алгоритм 304 расчета местоположения для расчета местоположения дистанционно управляемого транспортного средства 102. В одном варианте воплощения в операторе, расположенном в модуле 302 расчета местоположения, реализуется тот же алгоритм для расчета местоположения дистанционно управляемого транспортного средства 102, что и в модуле расчета местоположения 202 транспортного средства, описанном со ссылкой на фиг.2. Например, как в модуле расчета местоположения 202, расположенном на транспортном средстве, так и в операторе, расположенном в модуле расчета местоположения 302 может быть применен один и тот же алгоритм навигационного счисления для расчета местоположения дистанционно управляемого транспортного средства 102. Применение одного и того же алгоритма в обоих модулях 202 и 302 эффективно обеспечивает вывод на дисплей точного изображения дистанционно управляемого транспортного средства 102 в его окружающей среде.
Модуль отслеживания местоположения 124 может включать модуль обновления местоположения 306 для обновления отслеживаемого местоположения дистанционно управляемого транспортного средства. В одном варианте воплощения модуль обновления местоположения 306 может обновлять отслеживаемое местоположение дистанционно управляемого транспортного средства обновлением переменных алгоритма расчета местоположения 304. Например, модуль обновления местоположения 306 может обновить переменные алгоритма расчета местоположения транспортного средства по координатным и ориентационным данным, которые хранятся в пакете данных о местоположении, полученном от дистанционно управляемого транспортного средства 102. Как отмечалось выше со ссылкой на фиг.2, модуль определения и передачи местоположения 116 дистанционно управляемого транспортного средства 102 может передать пакет данных о местоположении 212, включая данные координат, ориентации и метки времени, удаленному оператору 104, когда разность между расчетным и определенным местоположением дистанционно управляемого транспортного средства превышает установленное значение ошибки.
Модуль обновления местоположения 306 может обновить отслеживаемое местоположение дистанционно управляемого транспортного средства по метке времени пакета данных о местоположении 212, полученного от дистанционно управляемого транспортного средства 102. Например, модуль обновления местоположения 306 может экстраполировать данные, сохраненные в пакете данных о местоположении 212 по любой разнице между меткой времени пакета данных о местоположении (т.е. временем достоверности пакета данных о местоположения) и временем получения пакета данных о местоположении модулем отслеживания местоположения 124. В примере, где пакет данных о местоположении генерируется с опережающей временной добавкой, которая соответствует времени задержки при распространении данных, время и координаты пакета данных о местоположении точно совпадают со временем и координатами в модуле расчета местоположения 302. Следует заметить, что пакет данных о местоположении 212 может быть сгенерирован, поскольку модуль сравнения местоположения 210 транспортного средства указывает, что ошибка, накопленная в алгоритме расчета местоположения 204, превысила установленный пороговый уровень ошибки, поэтому модулю отслеживания местоположения 124, расположенному на удаленном операторе, необходимы обновленные координаты, особенно если в дистанционном операторе применялся тот же алгоритм расчета местоположения 304, что и алгоритм расчета местоположения 204 в транспортном средстве 102, и таким образом вероятно накопленная ошибка в удаленном операторе также находится вблизи установленного порогового значения или превышает его.
Хотя на фиг.3 показано только одно транспортное средство, но может быть предусмотрено и несколько транспортных средств. Если предусмотрено несколько транспортных средств, то модуль обновления местоположения 306 может отслеживать позицию одного или более транспортных средств. В одном варианте воплощения во всех этих транспортных средствах может быть реализован один и тот же алгоритм передачи своих пакетов данных о местоположения 212, так что все дистанционно управляемые транспортные средства и все операторы имеют точные координаты всех дистанционно управляемых транспортных средств. В таком варианте воплощения разные операторы могут виртуально управлять всеми дистанционно управляемыми транспортными средствами, а также планировать и координировать совместную работу нескольких транспортных средств. Альтернативно, несколько транспортных средств могут знать местоположения других транспортных средств, так что дистанционно управляемые транспортные средства сами могут проводить совместную работу без вмешательства со стороны операторов. На фиг.7 представлена конфигурация системы, для проведения таких совместных работ.
В одном варианте воплощения оператор модуля 302 расчета местоположения постоянно рассчитывает местоположение дистанционно управляемого транспортного средства, чтобы модуль дисплея постоянно обновлял выводимое виртуальное изображение дистанционно управляемого транспортного средства.
Демонстрационный процесс
На фиг.4-6 представлены процессы, относящиеся к дистанционно управляемым транспортным средствам. Демонстрационные процессы описаны в виде совокупности блоков в логической функциональной схеме, где представлена последовательность операций, которые могут быть внедрены в аппаратное обеспечение, программное обеспечение или их комбинацию. В контексте программного обеспечения блоки представляют программные инструкции, выполнение которых одним или несколькими процессорами приведет к выполнению перечисленных операций. Обычно программные инструкции включают процедуры, программы, объекты, компоненты, структуры данных и тому подобное для выполнения конкретных функций или создания конкретных абстрактных типов данных. Порядок следования описанных операций не следует трактовать как ограничительное условие, и для воплощения процесса любое число описанных блоков можно расположить в любом порядке: последовательно и/или параллельно.
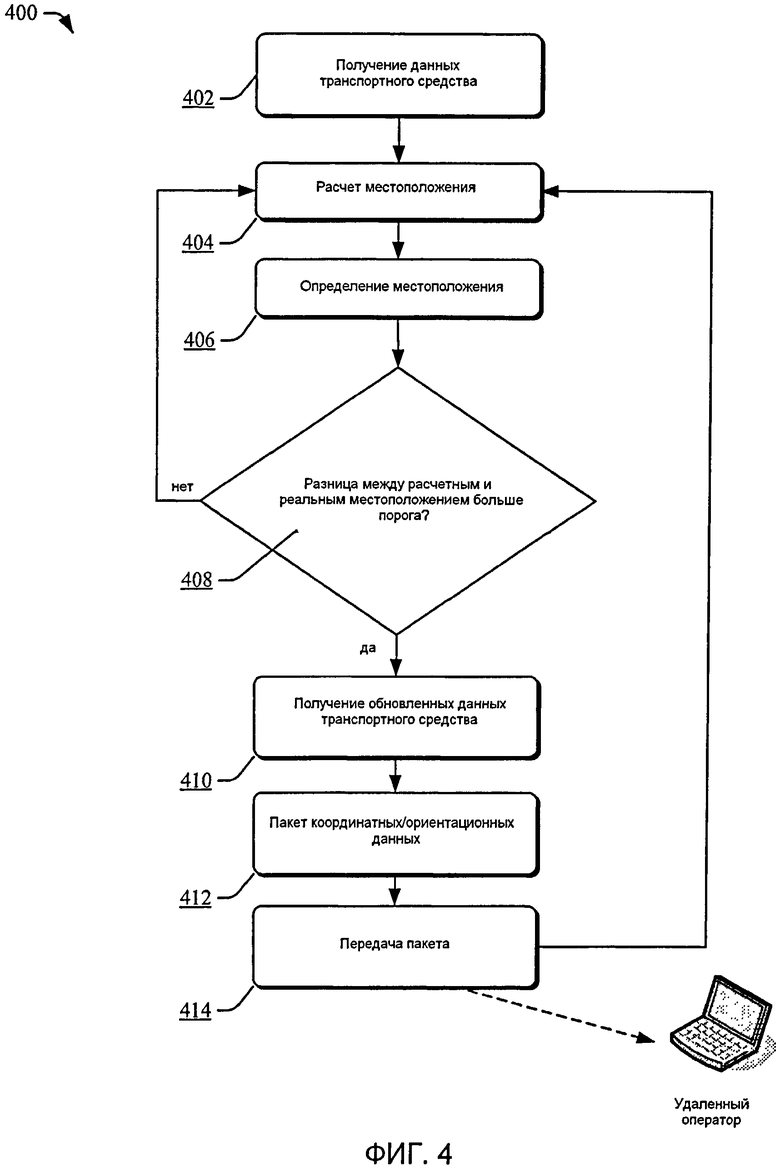
На фиг.4 представлен процесс 400 для передачи местоположения транспортного средства. Процесс 400 может быть выполнен по меньшей мере частично при помощи конфигурации системы по фиг.1. Например, процесс 400 для передачи местоположения дистанционно управляемого транспортного средства может быть выполнен транспортным средством, таким как дистанционно управляемое транспортное средство 102 по фиг.1. В 402 транспортное средство получает координатные, ориентационные и кинематические данные транспортного средства. В одном варианте воплощения с применением GPS совместно с инерциальной навигационной системой (INS) транспортное средство получает данные координат и ориентации, а также линейных и угловых скоростей и ускорений. Кроме того, транспортное средство может получить метку времени для координатных, ориентационных и кинематических данных. Координатные, ориентационные и кинематические данные вместе с меткой времени можно сохранить как пакет данных и использовать для инициализации реализуемых в 404 алгоритмов расчета местоположения. В 404 рассчитывается местоположения транспортного средства. В одном варианте воплощения по такому алгоритму, как алгоритм навигационного счисления, описанному выше, в 404 вычисляются координаты и ориентация транспортного средства, исходя из начальных координатных, ориентационных и кинематических данных, полученных в 402. При каждой итерации в модуле 404 расчета местоположения для вычисления точки, где может находиться транспортное средство в данный момент времени, в алгоритме навигационного счисления используется время, прошедшее с момента предыдущей итерации. В 406 определяются реальное местоположение транспортного средства. В одном варианте воплощения применение GPS совместно с INS позволяет определить координатные, ориентационные и кинематические данные транспортного средства в 406, как описано выше.
В 408 определяется, превышает ли установленный порог разность между расчетным местоположением (в 404) транспортного средства и реальным местоположением (в 406) транспортного средства. Если разность между расчетным и реальным местоположением транспортного средства превышает установленный порог (т.е. ветвь «Да» из 408), то в 410 получаются обновленные координатные, ориентационные и кинематические данные транспортного средства. Для обновления ориентационных и кинематических данных в 410 можно применить тот же метод, что и в 402 и 406. Например, в 410 можно получить текущие значения координат и ориентации, линейные и угловые скорости и ускорения транспортных средств, а также метку времени, указывающую время считывания координат. В другом примере обновленные данные можно получить непосредственно из 406. Обновленные координатные, ориентационные и кинематические данные можно сохранить в виде пакета данных в 412. На 414 пакет обновленных координатных, ориентационных и кинематических данных может быть передан.
Хотя на фиг.4 показано, как транспортное средство передает пакет данных, когда разность между расчетным и реальным местоположением транспортного средства превышает установленный порог (ветвь «Да» из 408), но и другие способы можно применить в дополнение к 408 для переключения передачи пакета данных. Например, пакет данных может также включать значение интервала контроля времени, чтобы если транспортное средство не посылало пакет данных в течение определенного промежутка времени, например двух секунд, то транспортное средство могло автоматически возобновить передачу пакета данных любым способом, чтобы получатель пакета данных знал, что транспортное средство все еще работоспособно. Второй определенный промежуток времени можно использовать совместно с интервалом контроля времени для указания того, что транспортное средство находится в нерабочем состоянии. Например, если оператор не принимает пакет данных в течение, например, 2,5 интервалов контроля времени, то оператор может считать, что транспортное средство не работает.
В одном варианте воплощения в 414 пакет обновленных координатных, ориентационных и кинематических данных передается дистанционному оператору через канал связи, описанный выше (и изображенный на фиг.4 штриховой линией). В 414 пакет обновленных координатных, ориентационных и кинематических данных может быть передан удаленному оператору, такому как удаленный оператор 104 по фиг.1. Если предусмотрено несколько транспортных средств, то пакет обновленных координатных, ориентационных и кинематических данных, полученных в 412, может быть передан одному или более транспортным средствам через 414 в дополнение к передаче пакета данных удаленному оператору.
Как только пакет координатных, ориентационных и кинематических данных передается в 414, транспортное средство использует координатные, ориентационные и кинематические данные из 410, чтобы сбросить в исходное состояние и переинициализировать алгоритмы расчета местоположения в 404 и может продолжить итеративный процесс обновления расчетного местоположения, исходя из времени, прошедшего от предыдущей итерации, и сравнить обновленное расчетное местоположение транспортного средства с реальным местоположением транспортного средства в 408, используя координатные, ориентационные и кинематические данные транспортного средства, полученные в 406.
Если разность между расчетным и реальным местоположением транспортного средства не превышает установленный порог (ветвь «Нет» из 408), то транспортное средство может продолжить обновление расчетного местоположения, исходя из времени, прошедшего от предыдущей итерации, и сравнить обновленное расчетное местоположение транспортного средства с реальным местоположением транспортного средства в 408, используя координатные и ориентационные данные, рассчитанные в 404, и последние полученные реальные координаты транспортного средства из 406.
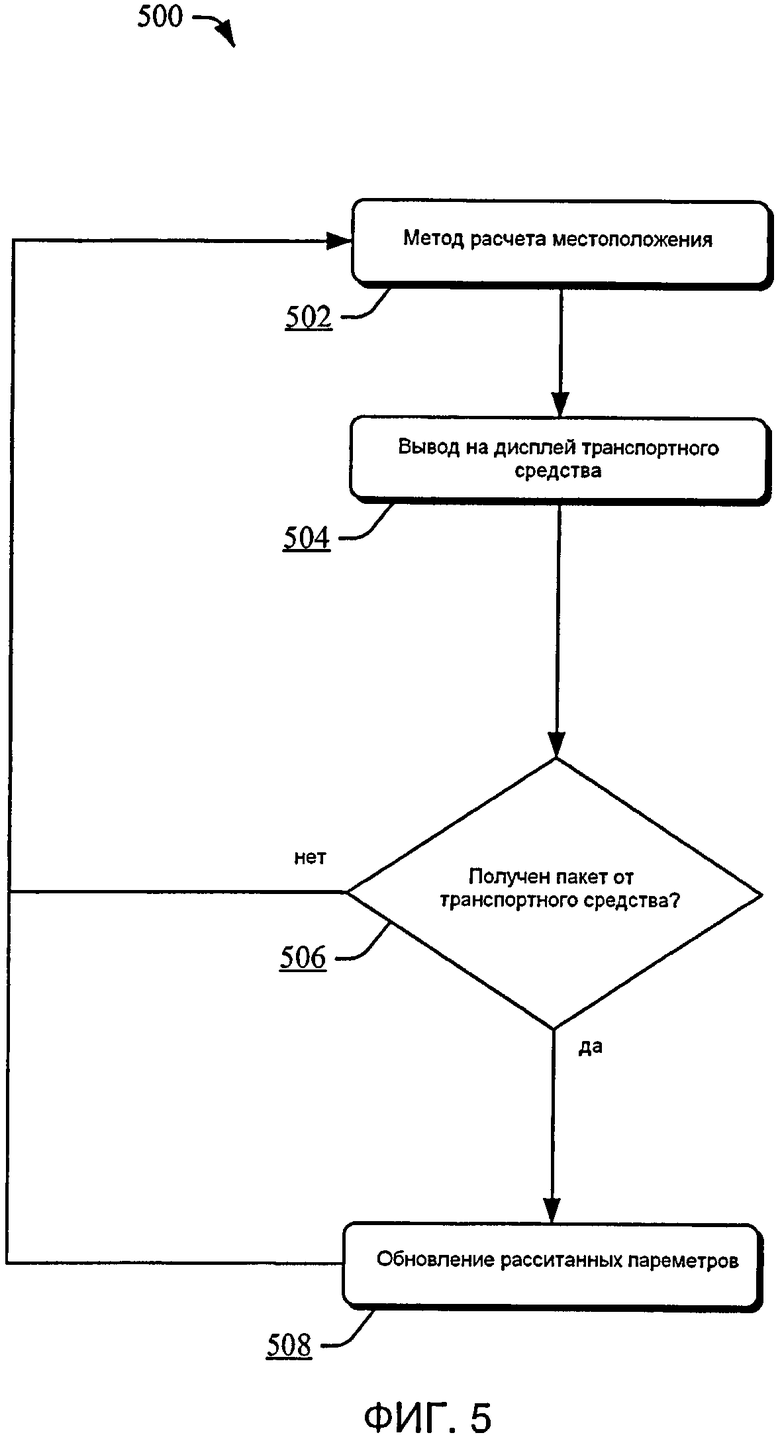
На фиг.5 представлен процесс 500 для вывода на дисплей местоположения транспортного средства. Процесс 500 может быть выполнен по меньшей мере частично при помощи конфигурации 100 системы по фиг.1. Например, процесс 500 может быть выполнен оператором, таким как удаленный оператор 104 по фиг.1, для вывода на дисплей виртуального изображения транспортного средства. Местоположение транспортного средства рассчитываются в 502. В одном варианте воплощения по алгоритму расчета, такому как алгоритм навигационного счисления, описанному выше, можно рассчитать местоположение транспортного средства в 502. Например, по тому же алгоритму навигационного счисления, описанному выше по отношению к элементу 404, рассчитывается местоположение транспортного средства в 502.
В 504 виртуальное изображение транспортного средства выводится на дисплей, исходя из расчетного местоположения транспортного средства. В одном варианте воплощения виртуальное изображение транспортного средства может быть выведено на дисплей вместе с одним или более измерениями виртуальной окружающей среды, как описано выше.
В 506 определяется, получен ли пакет данных от транспортного средства. В одном варианте воплощения полученный пакет данных может быть пакетом данных, описанным выше в 412 по фиг.4. Например, полученный пакет данных может состоять из текущих координат, линейных и угловых скоростей и ускорений транспортного средства, а также метки времени, указывающей время считывания координат. Если пакет данных получен от транспортного средства (ветвь «Да» от 506), то метод, применяемый для вычисления координат транспортного средства в 502, может быть обновлен в 508, исходя из полученного пакета данных. В одном варианте воплощения координаты транспортного средства, линейные и угловые скорости и ускорения, сохраненные в полученном пакете данных можно использовать для обновления одного или более параметров метода расчета местоположения в 502. В другом варианте воплощения метку времени, сохраненную в полученном пакете данных, можно использовать для дополнительного обновления метода расчета местоположения 502. Применение метки времени для обновления метода расчета местоположения 502 пригодно для любых задержек при передаче полученного пакета данных.
Как только метод, применяемый для расчета местоположения транспортного средства обновится в 508, оператор может продолжить вывод на дисплей транспортного средства в 504, исходя из последнего полученного пакета данных из 506. Если пакет данных не получен от транспортного средства (ветвь «Нет» из 506), то оператор может продолжить вывод на дисплей транспортного средства в 504 без обновления метода расчета местоположения 502.
На фиг.6 представлен процесс 600 для управления транспортным средством. Процесс 600 может быть выполнен по меньшей мере частично при помощи конфигурации 100 системы по фиг.1. Например, процесс 600 может быть выполнен оператором так, чтобы удаленный оператор 104 по фиг.1 управлял дистанционно управляемым транспортным средством 102 по фиг.1. В 602 по методу расчета местоположения рассчитывается местоположение транспортного средства. В одном варианте воплощения алгоритм навигационного счисления, такой как описан выше по фиг.4, рассчитывает местоположение транспортного средства в 602, исходя координатных, ориентационных и кинематических данных, сохраненных в пакете данных, полученном от транспортного средства. Алгоритм навигационного счисления может принять во внимание задержку передачи пакета данных, используя метку времени пакета данных, отражающую время генерации пакета данных.
В 604 виртуальное изображение транспортного средства выводится на дисплей, исходя из координат транспортного средства, рассчитанных в 602. В одном варианте воплощения виртуальное изображение транспортного средства может быть выведено на дисплей вместе с одним или более измерениями виртуальной окружающей среды, как описано выше. Например, одно или более измерений могут быть найдены из базы данных виртуальной окружающей среды для вывода на дисплей вместе с виртуальным изображением транспортного средства.
В 606 определяется, передавать ли какие-нибудь управляющие входные данные на транспортное средство. В одном варианте воплощения определение в 606 основано на выведенном изображении транспортного средства в 604. Если существуют управляющие входные данные для передачи на транспортное средство (ветвь «Да» из 606), то в 608 управляющие входные данные передаются на транспортное средство. В одном варианте воплощения в 606 оператор-человек определяет, передавать ли какие-нибудь управляющие входные данные на транспортное средство. Альтернативно, в 606 автоматические средства могут определить, передавать ли какие-нибудь управляющие входные данные на транспортное средство. В одном варианте воплощения в 608 оператор передает управляющие входные данные на транспортное средство по каналу 114 связи, описанному выше на фиг.1 (и изображенный на фиг.6 штриховой линией). Управляющие входные данные могут быть получены применением управляющего устройства. Например, оператор может манипулировать управляющим устройством, таким как часто применяемым в видеоиграх джойстиком, в котором акселерометр улавливает команды оператора в виде одного или более значений местоположения, ориентации и кинематических данных. Альтернативно, компьютер может генерировать управляющие входные данные, применяя программное обеспечение. Альтернативно, пользователь может ввести управляющие входные данные непосредственно в единицах координат, ориентации и кинематических данных.
В одном варианте воплощения в 608 оператор может собрать управляющие входные данные в пакет управляющих входных данных для отправки на транспортное средство. Пакет управляющих входных данных может дополнительно включать метку времени, отражающую время, когда управляющие входные данные предполагается представить. Метка времени может быть текущим временем оператора, генерирующего пакет управляющих входных данных для отправки на транспортное средство, а также может включать упреждающую временную добавку, такую чтобы данные пакета управляющих входных данных слегка опережали время генерации пакета управляющих входных данных для компенсации задержки при передаче адресату, такому как транспортное средство. Отправка пакета управляющих входных данных с меткой времени эффективно обеспечивает транспортное средство возможностью применить алгоритм навигационного счисления для экстраполяции данных пакета управляющих входных данных. Например, если транспортное средство проводит вычисления с применением метки времени пакета управляющих входных данных, для передачи которого от оператора до транспортного средства требуется 100 миллисекунд, то транспортное средство может применить алгоритм навигационного счисления для экстраполяции данных пакета управляющих входных данных 100-миллисекундной давности на текущий набор данных. Это успешно обеспечивает модель управления оператора, которого транспортное средство в данный момент времени поддерживает, причем координаты этой модели могут почти точно соответствовать координатам реального управления оператора, даже если в пакете данных, содержащем управляющие входные данные, была задержка. В таком варианте воплощения транспортное средство не реагирует напрямую на управляющие данные координат, переданные оператором, точнее оно реагирует на управляющие данные координат из модели управляющих входных данных оператора со счисленными координатами, в которой уже компенсирована задержка.
Применение модели управляющих входных данных, такой как модель управляющих входных данных со счисленными координатами как на передающей, так и на принимающей сторонах, приводит к эффективному сужению используемой полосы пропускания сети путем передачи сообщения об управляющих входных данных только тогда, когда будет превышен согласованный порог ошибки, после чего модели входных управляющих данных на обоих концах будут сброшены на реальные координаты.
Если пакет управляющих входных данных включает метку времени, отражающую время, когда управляющие входные данные предполагается представить, пакет управляющих входных данных может также включать интервал контроля времени как описано выше со ссылкой на фиг.4. Например, если оператор не посылал пакет управляющих входных данных в течение указанного промежутка времени, например двух секунд, то оператор мог автоматически возобновить передачу пакета управляющих входных данных любым способом, чтобы транспортное средство знало, что оператор все еще работоспособен. Второй определенный промежуток времени можно применить совместно с интервалом контроля времени для указания того, что оператор находится в нерабочем состоянии. Например, если транспортное средство не принимает пакет управляющих входных данных в течение, например, 2,5 интервалов контроля времени, то транспортное средство может считать, что оператор не работает.
Если предусмотрено несколько транспортных средств, то оператор может передать управляющие входные данные одному и более транспортным средствам. В одном варианте воплощения оператор может передать одни и те же управляющие входные данные на транспортные средства в 608 так, чтобы несколько транспортных средств работало синхронно друг с другом. Альтернативно, оператор может передать разные управляющие входные данные каждому из транспортных средств в 608 для независимой работы нескольких транспортных средств.
Как только управляющие входные данные будут переданы на транспортное средство в 608, оператор может продолжить вывод на дисплей транспортного средства в 604, исходя из вновь рассчитанного местоположения транспортного средства в 602. Если управляющие входные данные не будут переданы на транспортное средство (ветвь «Нет» из 606), тогда оператор может продолжить вывод на дисплей транспортного средства в 604, исходя из вновь обновленного расчетного местоположения транспортного средства в 602.
Демонстрационная конфигурация взаимодействующей системы
Фиг.7 - это комбинированная структурно-функциональная схема конфигурации системы 700 для совместно управляемых нескольких дистанционно управляемых транспортных средств. Конфигурация системы 700 может включать первое дистанционно управляемое транспортное средство 702 и второе дистанционно управляемое транспортное средство 704. Хотя на фиг.7 показано дистанционно управляемое транспортное средство 702 идентично дистанционному управляемому транспортному средству 704, дистанционно управляемые транспортные средства 702 и 704 могут быть разными транспортными средствами. Дистанционно управляемые транспортные средства 702 и 704 могут быть любыми транспортными средствами, управляемыми дистанционно, такими как летательный аппарат, морское судно, космический аппарат, автомобиль и тому подобное.
В общем, дистанционно управляемые транспортные средства 702 и 704 могут включать один и более процессоров, как описано выше относительно дистанционно управляемого транспортного средства 102 по фиг.1. Например, на фиг.7 показан процессор 706 для дистанционно управляемого транспортного средства 702 и процессор 708 для дистанционно управляемого транспортного средства 704. Как описано выше относительно дистанционно управляемого транспортного средства 102 по фиг.1, дистанционно управляемые транспортные средства 702 и 704 могут включать один или более экземпляров машиночитаемых носителей, которые соединены для взаимодействия с процессорами 706 и 708 соответственно. Например, на фиг.7 показаны машиночитаемый носитель 710 для дистанционно управляемого транспортного средства 702 и машиночитаемый носитель 712 для дистанционно управляемого транспортного средства 704.
Машиночитаемые носители 710 и 712 могут включать модули 714 и 716 расчета местоположения соответственно. Модуль 714 расчета местоположения может рассчитать местоположение первого дистанционно управляемого транспортного средства 702, а также рассчитать местоположение второго дистанционно управляемого транспортного средства 704. Аналогично, модуль 716 расчета местоположения может рассчитать местоположение дистанционно управляемого транспортного средства 702 и дистанционно управляемого транспортного средства 704. Хотя на фиг.7 показаны только два дистанционно управляемых транспортных средства, но может быть предусмотрено и больше двух дистанционно управляемых транспортных средств, так что модули 714 и 716 расчета местоположения рассчитывают местоположение каждого из дистанционно управляемых транспортных средств.
Как отмечалось выше со ссылкой на модуль 202 расчета местоположения транспортного средства на фиг.2, модули 714 и 716 расчета местоположения могут применить любой алгоритм расчета местоположения для расчета местоположения дистанционно управляемых транспортных средств 702 и 704. В одном неограничивающем варианте воплощения модули 714 и 716 расчета местоположения могут применить алгоритм навигационного счисления для расчета местоположения дистанционно управляемых транспортных средств 702 и 704. В таком варианте воплощения по алгоритму навигационного счисления можно рассчитать местоположение дистанционно управляемого транспортного средства по ориентационным и кинематическим данным, полученным от транспортного средства. В одном варианте воплощения модули 714 и 716 расчета местоположения непрерывно рассчитывают местоположение дистанционно управляемых транспортных средств 702 и 704.
Машиночитаемые носители 710 и 712 могут дополнительно включать модули 718 и 720 определения местоположения соответственно. Модуль 718 определения местоположения может определить местоположение дистанционно управляемого транспортного средства 702, а модуль 720 определения местоположения может определить местоположение дистанционно управляемого транспортного средства 704. Как отмечалось выше со ссылкой на модуль 206 определения местоположения на фиг.2, любой метод определения местоположения можно применить для определения местоположения транспортного средства. В одном неограничивающем варианте воплощения в методах 718 и 720 определения местоположения можно применить систему GPS, дополненную методом INS для определения местоположения транспортного средства.
Машиночитаемый носитель 710 и 712 может дополнительно включать коммуникационные модули 722 и 724 соответственно для генерации и передачи пакета координатных данных, основываясь на сравнении вычисленных и реальных координат транспортного средства. Например, дистанционно управляемое транспортное средство 702 может сравнить свое расчетное местоположения со своим же реальным местоположением. Когда реальное местоположение дистанционно управляемого транспортного средства 702 отличаются от расчетного местоположения дистанционно управляемого транспортного средства 702 на величину, большую порогового значения, коммуникационный модуль 722 может сгенерировать пакет данных о местоположении. Аналогично, дистанционно управляемое транспортное средство 704 может сгенерировать пакет данных о местоположении, когда реальное местоположение отличается от расчетного местоположения на величину, большую порогового значения. В некоторых случаях, пороговые значения для дистанционно управляемых транспортных средств 702 могут быть равны пороговым значениям для дистанционно управляемых транспортных средств 704, но в других случаях пороговое значение может быть разным.
После генерации пакета данных о местоположении коммуникационные модули 722 и 724 могут передать этот пакет. В одном варианте воплощения коммуникационные модули 722 и 724 передают пакеты данных о местоположении удаленному оператору, такому как удаленный оператор 104 на фиг.1. Альтернативно, коммуникационный модуль 722 может передать пакет координатных о местоположении второму дистанционно управляемому транспортному средству 704. Например, коммуникационные модули 722 могут передать пакет данных о местоположении второму дистанционно управляемому транспортному средству по каналу связи 726. Аналогично, коммуникационные модули 724 могут передать пакет данных о местоположении дистанционно управляемому транспортному средству 702 по каналу связи 726. Хотя на фиг.7 показаны только два дистанционно управляемых транспортных средства, но могут быть задействованы и более двух дистанционно управляемых транспортных средств так, чтобы коммуникационные модули 722 и 724 передавали пакеты данных всем дистанционно управляемым транспортным средствам по каналам связи между всеми дистанционно управляемыми транспортными средствами. В другом альтернативном варианте воплощения коммуникационные модули 722 и 724 могут передать пакеты координатных данных удаленному оператору, такому как удаленный оператор 104 на фиг.1, а также любому другому одному или более дистанционно управляемому транспортному средству.
Как отмечалось выше со ссылкой на пакет 212 данных о местоположении по фиг.2, пакеты координатных о местоположении по фиг.7 может включать текущие координатные, ориентационные и кинематические данные транспортного средства, включая данные по линейной и угловой скорости и ускорению. Пакеты данных о местоположении могут дополнительно включать метку времени, отражающую время генерации пакетов данных о местоположении коммуникационным модулем 722 и 724.
Машиночитаемые носители 710 и 712 могут дополнительно включать модули 728 и 730 обновления местоположения соответственно для обновления расчетного местоположения дистанционно управляемых транспортных средств 702 и 704. Например, модуль 728 обновления местоположения может обновить расчетное местоположения дистанционно управляемого транспортного средства 702, исходя из пакета данных о местоположения коммуникационного модуля 722, когда реальное местоположение дистанционно управляемого транспортного средства 702 отличаются от расчетного местоположения дистанционно управляемого транспортного средства 702 на величину, большую значения порога. Модуль 728 обновления местоположения может дополнительно обновлять местоположение второго дистанционно управляемого транспортного средства 704, исходя из пакета данных о местоположении, полученного от коммуникационного модуля 724. Хотя на фиг.7 показаны только два дистанционно управляемых транспортных средства, но могут быть задействованы и более двух дистанционно управляемых транспортных средств, так чтобы модули 728 и 730 обновления местоположения обновляли расчетное местоположение каждого из дистанционно управляемых транспортных средств после приема пакета данных о местоположении от каждого из дистанционно управляемых транспортных средств.
Машиночитаемые носители 710 и 712 могут дополнительно включать командные модули 732 и 734 для приема одной или более команд управления. В одном варианте воплощения командные модули 732 и 734 принимают одну или более команд управления от других дистанционно управляемых транспортных средств. Например, командный модуль 732 может принять одну или более команд управления от дистанционно управляемого транспортного средства 704. Альтернативно, командные модули 732 и 734 принимают одну или более команд управления от удаленного оператора, такого как удаленный оператор 104 на фиг.1. В другом альтернативном примере командные модули 732 и 734 могут принять одну или более команд управления от другого дистанционно управляемого транспортного средства и/или удаленного оператора. В одном варианте воплощения командные модули 732 и 734 принимают одну или более команд управления по каналу связи 726, Альтернативно, командные модули 732 и 734 могут принять одну или более команд управления по другой линии связи.
Машиночитаемые носители 710 и 712 могут дополнительно включать управляющие модули 736 и 738 для управления траекторией дистанционно управляемых транспортных средств. Например, управляющий модуль 736 может управлять траекторией дистанционно управляемого транспортного средства 702. Управляющий модуль 736 может дополнительно управлять траекторией и другого дистанционно управляемого транспортного средства, такого как дистанционно управляемое транспортное средство 704. Аналогично, управляющий модуль 738 может управлять траекторией как дистанционно управляемого транспортного средства 704, так и дистанционно управляемого транспортного средства 702.
В одном варианте воплощения управляющие модули 736 и 738 могут управлять траекторией дистанционно управляемых транспортных средств путем вычисления траектории виртуального представления дистанционно управляемых транспортных средств в виртуальной окружающей среде. Например, управляющий модуль 736 может вычислить траекторию по виртуальному изображению как дистанционно управляемого транспортного средства 702, так и дистанционно управляемого транспортного средства 704 вместе с виртуальным изображением окружающей среды, в которой дистанционно управляемые транспортные средства 702 и 704 действуют. В одном варианте воплощения управляющие модули 736 и 738 могут получить виртуальные представления дистанционно управляемых транспортных средств из базы данных измерений транспортного средства, такой как база данных 118 измерений транспортного средства, описанная выше со ссылкой на фиг.1.
Хотя на фиг.7 показаны только два дистанционно управляемых транспортных средства, но может быть задействовано и больше двух дистанционно управляемых транспортных средств так, чтобы управляющие модули 736 и 738 отображали все дистанционно управляемые транспортные средства вместе на одном дисплее одновременно.
Заключение
Хотя предпочтительные и альтернативные варианты воплощения изобретения представлены и описаны, как отмечено выше, но можно внести много изменений без отклонения от сущности и объема изобретения. Соответственно, объем изобретения не ограничен описанием этих предпочтительных и альтернативных вариантов воплощения. Взамен этого, полностью данное изобретение следует определять, исходя из прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА С УЧЕТОМ ЗАДАЧИ И РИСКА | 2022 |
|
RU2785243C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА С УЧЕТОМ ЗАДАЧИ, МАРШРУТОВ И РИСКА | 2022 |
|
RU2785244C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА С УЧЕТОМ ЗАДАЧИ, МАРШРУТОВ, РАДИУСОВ ИНФОРМАЦИИ И РИСКА | 2022 |
|
RU2785259C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА С УЧЕТОМ ЗАДАЧИ, РАДИУСОВ ИНФОРМАЦИИ И РИСКА | 2022 |
|
RU2785258C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КОПАЮЩЕГО ПРИСПОСОБЛЕНИЯ (ВАРИАНТЫ) И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОЧЕЙ МАШИНЫ НА РАБОЧЕЙ ПЛОЩАДКЕ (ВАРИАНТЫ) | 1995 |
|
RU2134329C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ИНСПЕКТИРОВАНИЯ ПОДВОДНЫХ ТРУБОПРОВОДОВ | 2011 |
|
RU2635751C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТОЧНОГО МЕСТОНАХОЖДЕНИЯ ПРОМЫШЛЕННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2570571C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, УСТРОЙСТВО СЕРВЕРА, СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ, СПОСОБ ОБРАБОТКИ СЕРВЕРА И ПРОГРАММА | 2012 |
|
RU2602355C2 |
| УСТРОЙСТВО И СПОСОБЫ ДЛЯ УПРАВЛЕНИЯ ПАМЯТЬЮ, СВЯЗАННОЙ С ВИДЖЕТАМИ | 2009 |
|
RU2468419C2 |
| УСТРОЙСТВО И СПОСОБЫ ДЛЯ ОПТИМИЗАЦИИ ТРАНСПОРТИРОВКИ ДЛЯ ДОСТАВКИ КОНТЕНТА ГРАФИЧЕСКИХ ИНТЕРФЕЙСНЫХ ЭЛЕМЕНТОВ | 2009 |
|
RU2464638C2 |
Изобретение относится к дистанционному управлению транспортным средством. Технический результат - эффективное управление транспортным средством. Способ дистанционного управления транспортным средством включает расчет местоположения транспортного средства. Местоположение транспортного средства можно вычислить по алгоритму вычисления местоположения. Для обновления расчетного местоположения транспортного средства можно применить пакет данных о местоположении, принятый от транспортного средства. Виртуальное изображение транспортного средства, полученное на основе обновленного расчетного местоположения транспортного средства, можно вывести на дисплей. По виртуальному изображению транспортного средства, выведенному на дисплей, на транспортное средство могут быть переданы сигналы управления. 3 н. и 16 з.п. ф-лы, 7 ил.
1. Способ дистанционного управления транспортным средством, предусматривающий
операции, осуществляемые на стороне транспортного средства, а именно
расчет местоположения транспортного средства с получением расчетного местоположения транспортного средства;
получение действительного местоположения транспортного средства;
генерация пакета данных о местоположении транспортного средства, когда
разность между расчетным местоположением транспортного средства и его действительным местоположением превышает порог отклонения местоположения; и
передача пакета данных удаленному оператору;
и
операции, осуществляемые на стороне удаленного оператора, а именно
расчет местоположения транспортного средства с получением расчетного местоположения транспортного средства;
обновление расчетного местоположения транспортного средства, когда от транспортного средства получен пакет данных о местоположении транспортного средства;
вывод виртуального изображения транспортного средства на дисплей исходя из обновленного расчетного местоположения транспортного средства; и
передача одного или более сигналов управления на транспортное средство исходя из выведенного на дисплей виртуального изображения транспортного средства.
2. Способ по п. 1, в котором для расчета местоположения транспортного средства применяется алгоритм навигационного счисления.
3. Способ по п. 1, в котором передача одного или более сигналов управления на транспортное средство включает передачу пакета данных управляющего сигнала на транспортное средство, пакет данных управляющего сигнала передается, когда расчетное местоположение в управляющих входных данных и действительное местоположение в управляющих входных данных превышают порог отклонения местоположения.
4. Способ по п. 3, в котором пакет данных управляющего сигнала включает метку времени, указывающую время, при котором пакет данных управляющего сигнала является достоверным.
5. Способ по п. 4, в котором действительное местоположение в управляющих входных данных получено от акселерометра в устройстве ввода управляющего сигнала.
6. Способ по п. 1, в котором обновление расчетного местоположения транспортного средства включает обновление расчетного местоположения транспортного средства исходя из координатных, ориентационных и кинематических данных, сохраненных в пакете данных о местоположении.
7. Способ по п. 6, в котором обновление расчетного местоположения транспортного средства дополнительно включает обновление расчетного местоположения транспортного средства исходя из метки времени, сохраненной в пакете данных о местоположении.
8. Способ по п. 1, дополнительно содержащий вывод одного или более виртуальных объектов на дисплей устройства отображения, один или более виртуальные объекты представляют собой изображения структурного макета, захваченные из видеодатчика на борту транспортного средства.
9. Способ по п. 1, дополнительно содержащий считывание одного или более реальных изображений земли одним или более видеодатчиками.
10. Способ по п. 9, дополнительно содержащий запись одного или более реальных изображений земли в базу данных виртуальной окружающей среды, когда имеется расхождение между считанными реальными изображениями земли и одним или несколькими изображениями в базе данных виртуальной окружающей среды.
11. Системная архитектура дистанционно управляемого транспортного средства, предусматривающая
дистанционно управляемое транспортное средство, содержащее
модуль расчета местоположения, расположенный на транспортном средстве и предназначенный для расчета местоположения транспортного средства;
модуль получения действительного местоположения для получения действительного местоположения транспортного средства;
модуль сравнения местоположения для генерации пакета данных о местоположении, когда разность между расчетным местоположением транспортного средства и действительным местоположением транспортного средства превышает порог отклонения местоположения;
коммуникационный модуль для передачи пакета данных о местоположении на платформу удаленного оператора; и
управляющий модуль для управления траекторией транспортного средства;
и
удаленный оператор, содержащий
модуль расчета местоположения, расположенный на стороне оператора и предназначенный для расчета местоположения транспортного средства;
модуль обновления местоположения для обновления расчетного местоположения транспортного средства при передаче пакета данных о местоположении от транспортного средства;
модуль отображения для вывода виртуального изображения транспортного средства на дисплей исходя из обновленных расчетных координат транспортного средства; и
командный модуль для передачи одной или более команд на транспортное средство.
12. Системная архитектура по п. 11, в которой управляющий модуль применяет расчетное местоположение в управляющих входных данных для управления траекторией транспортного средства.
13. Системная архитектура по п. 11, в которой модуль расчета местоположения, расположенный на транспортном средстве, и модуль расчета местоположения, расположенный на стороне оператора, рассчитывают местоположение транспортного средства по тому же алгоритму навигационного счисления.
14. Системная архитектура по п. 11, в которой модуль обновления местоположения обновляет расчетное местоположение транспортного средства исходя из координатных, ориентационных и кинематических данных в пакете данных о местоположении.
15. Системная архитектура по п. 14, в которой модуль обновления местоположения дополнительно обновляет расчетное местоположение транспортного средства исходя из метки времени в пакете данных о местоположении.
16. Системная архитектура, обеспечивающая совместную работу дистанционно управляемых транспортных средств, предусматривающая
первое дистанционно управляемое транспортное средство, содержащее
модуль расчета местоположения первого транспортного средства для расчета местоположения первого транспортного средства;
модуль получения местоположения первого транспортного средства для получения действительного местоположения первого транспортного средства;
модуль связи первого транспортного средства для передачи пакета данных о местоположении первого транспортного средства, когда разность между расчетным местоположением первого транспортного средства и его действительным местоположением превышает первый порог отклонения местоположения;
модуль обновления местоположения первого транспортного средства для обновления расчетного местоположения первого транспортного средства исходя из пакета данных о местоположении первого транспортного средства;
командный модуль первого транспортного средства для получения одной или нескольких оперативных команд; и
управляющий модуль первого транспортного средства для управления траекторией первого транспортного средства; и
второе дистанционно управляемое транспортное средство, содержащее
модуль расчета местоположения второго транспортного средства для расчета местоположения первого транспортного средства и последующего расчета местоположения второго транспортного средства;
модуль получения местоположения второго транспортного средства для получения действительного местоположения второго транспортного средства;
модуль связи второго транспортного средства для передачи пакета данных о местоположении второго транспортного средства по меньшей мере первому транспортному средству, когда разность между расчетным местоположением второго транспортного средства и его действительным местоположением превышает второй порог отклонения местоположения;
модуль обновления местоположения второго транспортного средства для обновления расчетного местоположения второго транспортного средства исходя из пакета данных о местоположении второго транспортного средства, когда разность между расчетным местоположением второго транспортного средства и его действительным местоположением превышает второй порог отклонения местоположения, помимо этого модуль обновления местоположения второго транспортного средства, в дополнение к обновлению расчетного местоположения второго транспортного средства, обновляет расчетное положение первого транспортного средства, выполненное модулем расчета местоположения второго транспортного средства исходя из полученного пакета данных о местоположении первого транспортного средства;
командный модуль второго транспортного средства для получения одной или нескольких оперативных команд; и
управляющий модуль второго транспортного средства для управления траекторией второго транспортного средства.
17. Системная архитектура по п. 16, в которой модуль расчета местоположения второго транспортного средства рассчитывает местоположение первого транспортного средства и местоположение второго транспортного средства, применяя алгоритм навигационного счисления.
18. Системная архитектура по п. 16, в которой командный модуль первого транспортного средства и командный модуль второго транспортного средства получают одну или несколько оперативных команд от удаленного оператора.
19. Системная архитектура по п. 16, в которой командный модуль первого транспортного средства обменивается оперативными командами с командным модулем второго транспортного средства.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 7483789 B1, 27.01.2009 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Роликовый бортодержатель к машине Фурко | 1947 |
|
SU83643A1 |

