Система управления движением предназначена для повышения вероятностей выполнения задачи транспортного средства в процессе движения.
Известна система управления движением технических объектов, которая состоит из дистанционно управляемых транспортных средств и удаленного оператора. Каждое средство содержит модули расчета местоположения, определения местоположения, передачи, обновления местоположения, командный и управляющий. Удаленный оператор содержит дисплей, модули расчета местоположения, обновления местоположения, отображения средств на дисплее и командный. Каждое средство и удаленный оператор снабжены системной архитектурой, обеспечивающей совместную работу модулей.
Эта система определяет фактическое местоположение каждого средства сравнением расчетных данных с измеренными данными путем генерации пакета координатных, ориентационных и кинематических данных системной архитектуры дистанционно управляемого транспортного средства и оператора. По виртуальному изображению данных транспортного средства, выведенных на дисплей оператора, на транспортное средство передают сигналы управления (патент RU №2564628 по заявке 2012104512/08, кл. С2).
Однако этот способ не содержит достаточного количества данных технических средств, а также других объектов, необходимых для управления ориентационными и кинематическими параметрами транспортного средства с целью выполнения его функции во время движения.
Известна также информационная система мониторинга и обнаружения событий между транспортными средствами либо между транспортными средствами и стационарными, плавучими или наземными объектами и комплексами с помощью удаленного наблюдения, которая содержит средства связи автоматической информационной системы AIS, применяемой в судоходстве, средств радиолокации, средств спутникового слежения и средств визуального отображения состояния транспортного средства.
Система выполнена с возможностью сбора, хранения и фильтрации данных о скорости движения транспортных средств и расстояния между ними, расстоянии от стационарных, плавучих или наземных объектов и комплексов, определения начала и конца встречи с транспортным средством либо со стационарными, плавучими или наземными объектами и комплексами, определения вида встречи в зависимости от вида транспортных средств и вида стационарных, плавучих или наземных объектов и комплексов, обработки и сохранении параметров встреч в базе данных, вывода информации о встречах на средство визуального отображения. Эта система автоматически определяет местоположение объектов, их скорости, расстояния относительно друг друга, а также параметры сближения подвижных и неподвижных объектов для прогнозирования траекторий движения, предотвращения столкновений и безопасного сближения объектов (патент RU №2637069 по заявке 2015146897, кл. С2 - прототип).
Однако эта система также не содержит достаточного количества данных технических средств, а также других объектов, необходимых для управления ориентационными и кинематическими параметрами транспортного средства и организованной группы таких средств с целью выполнения их функций в ходе и в конце движения.
Задачей изобретения является повышение вероятностей выполнения задачи транспортного средства и организованной группы средств в процессе движения.
Технический результат достигается тем, что система управления движением транспортного средства, содержащая средства связи, радиолокации, спутниковые и отображения состояния транспортного средства и других объектов, блок измерения, аналитический блок, собственную и внешнюю базу данных и блок управления, выполненные с возможностью измерения, получения, обработки, хранения, фильтрации, периодического обновления и вывода данных на средство отображения о координатных, ориентационных и кинематических данных транспортного средства, других транспортных средств, стационарных объектов и их кинематического взаимодействия, содержит блок информации с модулями задачи и риска выполнения задачи, с возможностью управления средством изменением его ориентационных и кинематических параметров в зависимости от задачи и риска ее выполнения.
При этом модуль задачи может содержать задачу группы средств, передвигающихся по одному маршруту, модуль выполнен с возможностью изменения задачи от внешней базы данных.
Модуль риска может содержать количественную величину риска группы транспортных средств, связанную с задачей, модуль выполнен с возможностью изменения риска от внешней базы данных.
Зависимость величины риска выполнения функций и задачи транспортного средства или группы транспортных средств от координатных, ориентационных и кинематических параметров транспортного средства выполнена с возможностью вывода на средство отображения.
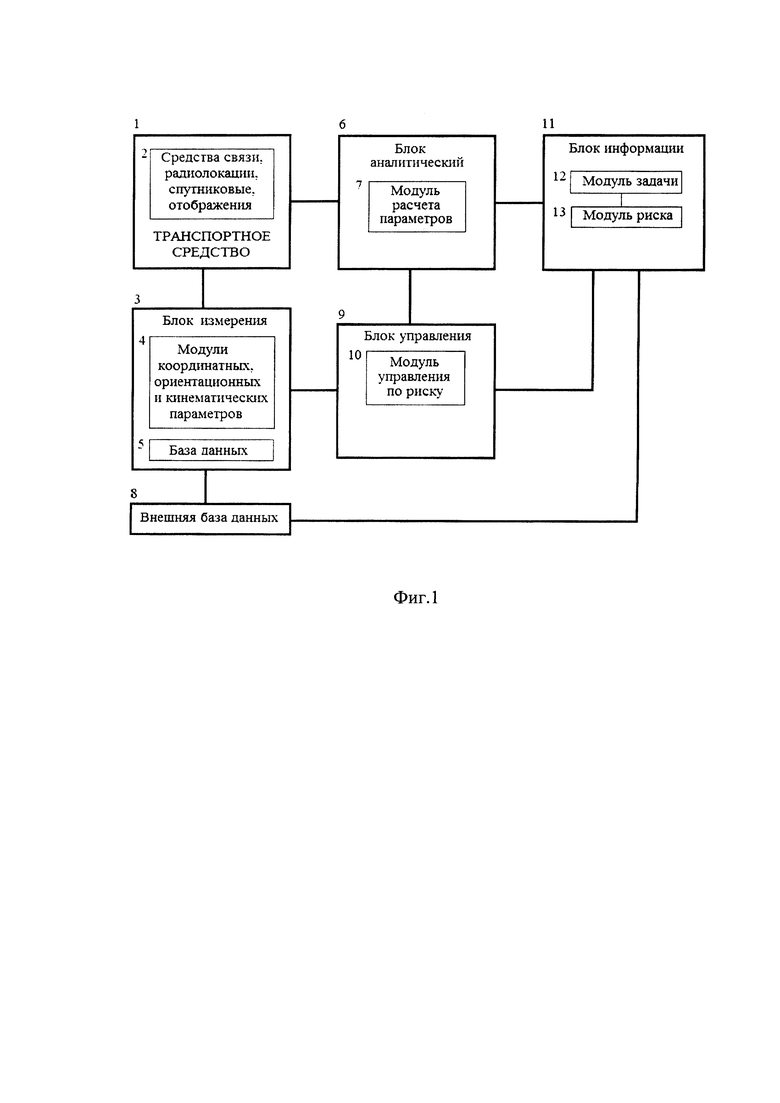
Изобретение поясняется фиг. 1, где обозначено: 1 - транспортное средство; 2 - средства связи, радиолокации, спутниковые и отображения; 3 - блок измерения; 4 - модули координатных, ориентационных и кинематических параметров транспортного средства, других транспортных средств, стационарных объектов и их кинематического взаимодействия; 5 -база данных транспортного средства; 6 - аналитический блок; 7 - модуль расчета параметров; 8 - внешняя база данных; 9 - блок управления; 10 - модуль управления по риску; 11 - блок информации; 12 - модуль задачи; 13 - модуль риска.
Работа системы происходит следующим образом. В исходном положении в базу данных 5 и блок информации 11 системы управления транспортного средства 1 вводят параметры задачи в ходе и в конце движения, например, время прибытия средства и/или группы средств в заданную точку маршрута, а также степень риска выполнения задачи. В модуль задачи 12 вводят данные об относительном допустимом количестве группы средств, например, 0,9 или 90%. В модуль риска 13 вводят степень риска, например, 0,05, которая понимается как вероятность не выполнения задачи 5%. При этом вероятность выполнения задачи при сохранении 90% транспортных средств понимается как 0,95 или 95%.
В процессе движения транспортного средства, используя встроенные и внешние средства связи, радиолокации и спутниковые 2, в блоке 3 измеряют и размещают данные в модуле 4 о своих координатных, ориентационных и кинематических параметрах, а также о подобных параметрах других транспортных средств, стационарных объектов и их кинематического взаимодействия, например, столкновений. Эти параметры обрабатывают, хранят, фильтруют, периодически обновляют в базах данных 5 и 8 и, при необходимости, выводят на средство отображения информации, например, визуальное. При получении данных от средств связи, радиолокации и спутниковых, в аналитическом блоке 6 с использованием модуля 7 производят расчет координатных, ориентационных и кинематических и других параметров в зависимости от расхождения заданной и расчетной степени риска и модулем 10 блока 9 управляют скоростью и направлением движения транспортного средства.
Расчет параметров движения производят для задачи транспортного средства, а также для организованной группы средств, передвигающихся по маршруту в колонне. При изменении задачи транспортного средства по времени прибытия в заданную точку или вероятности выполнения задачи от внешней базы данных 8, а также риска выполнения задачи транспортным средством или группой средств, информация через блок 11 поступает в аналитический блок 8 и блок 9, откуда управляют скоростью и направлением движения транспортного средства изменением ориентационных и кинематических параметров.
Зависимость величины риска выполнения функций и задачи транспортного средства или группы транспортных средств от координатных, ориентационных и кинематических параметров транспортного средства выполнена с возможностью вывода на средство отображения, используемое экипажем транспортного средства. Экипаж может принять собственное решение или направить это решение во внешнюю базу данных для согласования применения.
Технический результат изобретения позволяет повысить вероятности выполнения задачи транспортного средства и организованной группы таких средств в процессе движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА С УЧЕТОМ ЗАДАЧИ, РАДИУСОВ ИНФОРМАЦИИ И РИСКА | 2022 |
|
RU2785258C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА С УЧЕТОМ ЗАДАЧИ, МАРШРУТОВ И РИСКА | 2022 |
|
RU2785244C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА С УЧЕТОМ ЗАДАЧИ, МАРШРУТОВ, РАДИУСОВ ИНФОРМАЦИИ И РИСКА | 2022 |
|
RU2785259C1 |
| Способ интеграции систем и/или средств обеспечения навигационной и мониторинговой информацией и аппаратно-программный комплекс - центр компетенций | 2017 |
|
RU2654237C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ДИСТАНЦИОННО ВЗАИМОДЕЙСТВУЮЩИХ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2564628C2 |
| ИНФОРМАЦИОННАЯ СИСТЕМА МОНИТОРИНГА И ОБНАРУЖЕНИЯ СОБЫТИЙ МЕЖДУ ТРАНСПОРТНЫМИ СРЕДСТВАМИ ЛИБО МЕЖДУ ТРАНСПОРТНЫМИ СРЕДСТВАМИ И СТАЦИОНАРНЫМИ, ПЛАВУЧИМИ ИЛИ НАЗЕМНЫМИ ОБЪЕКТАМИ И КОМПЛЕКСАМИ С ПОМОЩЬЮ УДАЛЕННОГО НАБЛЮДЕНИЯ | 2015 |
|
RU2637069C2 |
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПАССАЖИРОВ ОБЩЕСТВЕННОГО ТРАНСПОРТА И УСТРОЙСТВО ДЛЯ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПАССАЖИРОВ ОБЩЕСТВЕННОГО ТРАНСПОРТА | 2009 |
|
RU2411591C1 |
| РАДИОПОИСКОВАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2244642C1 |
Изобретение относится к системе управления движением транспортного средства. Система содержит: средства связи, средства радиолокации, спутниковые средства, средства отображения состояния транспортного средства и других объектов, блок измерения, аналитический блок, собственную и внешнюю базу данных, блок управления, блок информации с модулями задачи и риска выполнения задачи. Средства системы выполнены с возможностью измерения, получения, обработки, хранения, фильтрации, периодического обновления и вывода данных на средство отображения о координатных, ориентационных и кинематических данных транспортного средства, других транспортных средств, стационарных объектов и их кинематического взаимодействия. Блок информации с модулями задачи и риска выполнения задачи выполнены с возможностью управления средством изменением его ориентационных и кинематических параметров в зависимости от задачи и риска выполнения задачи. Достигается повышение вероятности выполнения задачи транспортного средства и организованной группы транспортных средств в процессе движения. 5 з.п. ф-лы, 1 ил.
1. Система управления движением транспортного средства, содержащая средства связи, радиолокации, спутниковые и отображения состояния транспортного средства и других объектов, блок измерения, аналитический блок, собственную и внешнюю базу данных и блок управления, выполненные с возможностью измерения, получения, обработки, хранения, фильтрации, периодического обновления и вывода данных на средство отображения о координатных, ориентационных и кинематических данных транспортного средства, других транспортных средств, стационарных объектов и их кинематического взаимодействия, отличающаяся тем, что содержит блок информации с модулями задачи и риска выполнения задачи с возможностью управления средством изменением его ориентационных и кинематических параметров в зависимости от задачи и риска ее выполнения.
2. Система по п. 1, отличающаяся тем, что модуль задачи содержит задачу группы средств, передвигающихся по маршруту.
3. Система по п. 1, отличающаяся тем, что модуль задачи выполнен с возможностью изменения задачи от внешней базы данных.
4. Система по п. 1, отличающаяся тем, что модуль риска содержит количественную величину риска группы средств, связанную с задачей.
5. Система по п. 1, отличающаяся тем, что модуль риска содержит количественную величину риска, изменяемую от внешней базы данных.
6. Система по п. 1, отличающаяся тем, что зависимость величины риска от координатных, ориентационных и кинематических параметров средства выполнена с возможностью вывода на средство отображения.
| ИНФОРМАЦИОННАЯ СИСТЕМА МОНИТОРИНГА И ОБНАРУЖЕНИЯ СОБЫТИЙ МЕЖДУ ТРАНСПОРТНЫМИ СРЕДСТВАМИ ЛИБО МЕЖДУ ТРАНСПОРТНЫМИ СРЕДСТВАМИ И СТАЦИОНАРНЫМИ, ПЛАВУЧИМИ ИЛИ НАЗЕМНЫМИ ОБЪЕКТАМИ И КОМПЛЕКСАМИ С ПОМОЩЬЮ УДАЛЕННОГО НАБЛЮДЕНИЯ | 2015 |
|
RU2637069C2 |
| US 2020294401 A1, 17.09.2020 | |||
| WO 2018129321 A1, 12.07.2018 | |||
| US 2021188301 A1, 24.06.2021 | |||
| US 8380362 B2, 19.02.2013. | |||

