ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
ОБЛАСТЬ ТЕХНИКИ
[0001] Варианты выполнения настоящего изобретения в целом относятся к способам и устройствам для автоматической установки скорости детандера, который принимает поток текучей среды с выхода другого детандера, путем положительного или отрицательного смещения этой скорости для уменьшения времени перехода через диапазон скоростей, которые опасны для одного из детандеров.
УРОВЕНЬ ТЕХНИКИ
[0002] В системах охлаждения газа и нефти часто имеет место ситуация, когда два детандера расположены последовательно и используются для охлаждения охлаждающего газа. Этот охлаждающий газ представляет собой хладагент для сжижения природного газа. На фиг.1 показана схема известного узла 1 из двух детандеров. Поток газа из первого детандера 10 поступает во второй детандер 20, при этом числительные "первый" и "второй" относятся к положениям детандеров в направлении 30 потока.
[0003] Первый детандер 10 типично принимает газ, имеющий высокое давление и комнатную температуру, и выдает газ, имеющий низкое давление и низкую температуру. Второй детандер 20 принимает газ с выхода первого детандера 10 и продолжает охлаждение газа. У первого детандера 10 и второго детандера 20, в которых происходит расширение газа, имеются вращающиеся лопастные колеса 22 и 24, соответственно. Во время нормальной работы, когда нет никаких проблем, связанных с выходом за диапазон скоростей для одного из детандеров, регулятор 40 устанавливает скорость вращения лопастного колеса 24 второго детандера 20 равной текущей скорости вращения лопастного колеса 22 первого детандера 10, Регулятор 40 может принимать информацию относительно текущей скорости первого детандера 10 от датчика (Sv1) 50 скорости.
[0004] В последующем описании термин "скорость" включает "скорость вращения," а термин "скорость детандера" используется вместо многократного использования термина "скорость лопастного колеса детандера". Скорости детандеров 10 и 20 связаны с проходящим сквозь них потоком газа: при увеличении потока газа скорость увеличивается.
[0005] Как известно, у детандера обычно имеется по меньшей мере одна нежелательная рабочая скорость. Когда детандер работает при нежелательной рабочей скорости в течение длительного времени, вероятность его повреждения больше, чем когда он работает при других рабочих скоростях, например потому, что при нежелательной скорости имеет место чрезмерная вибрация вследствие резонанса. Поэтому операторы пытаются не допустить работы детандеров на нежелательной скорости, например, управляя их работой так, чтобы эта работа вблизи нежелательной скорости происходила в течение как можно более короткого временного периода.
[0006] Традиционно, во избежание работы первого детандера 10 или второго детандера 20 в нежелательном для них диапазоне скоростей, скорость второго детандера 20 вручную устанавливают несовпадающей со скоростью первого детандера 10. Такая установка скорости второго детандера 20, когда она отличается от скорости первого детандера 10, приводит к изменению распределения падения давления на детандерах. Поэтому на скорость первого детандера 10 влияет то, как установлена скорость второго детандера 20. Управляя устанавливаемой скоростью второго детандера 20, оператор косвенно может также управлять скоростью первого детандера 10.
[0007] Ручное управление системой имеет следующие недостатки. Ручное смещение устанавливаемой скорости второго детандера 20 связано с высоким риском случайного нежелательного воздействия на один из детандеров. В дополнение к смещению скорости второго детандера, оператор должен управлять системой так, чтобы удовлетворить ограничениям, связанным с максимальным разрешенным временем работы в нежелательном диапазоне скоростей, максимальной разрешенной скоростью изменения устанавливаемой скорости и максимальной разрешенной разностью скоростей между детандерами.
[0008] Другой недостаток состоит в том, что в случае ручной регулировки нежелательный диапазон часто определяют как более широкий, чем необходимый минимум, что сужает необходимый рабочий диапазон детандера.
[0009] Ручное смещение скорости второго детандера 20 может также привести к трудностям в управлении системой в целом. Например, скорость изменения устанавливаемой скорости должна поддерживаться ниже порогового значения, чтобы система с двумя детандерами смогла достичь равновесных рабочих состояний, а на работать в потенциально опасных и трудных для управления переходных состояниях. Когда скорость устанавливают вручную, эта скорость изменения скорости может случайно стать слишком большой.
[0010] Кроме того, ручная регулировка с целью уменьшения времени работы детандера в нежелательном диапазоне скоростей может отвлечь оператора от контроля системы в целом, что может привести к задержке реакции на несвязанную с обсуждаемой нештатную ситуацию, которая может возникнуть одновременно с ручной регулировкой.
[0011] Соответственно, желательно создать системы и способы, в которых устранены описанные выше проблемы и недостатки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0012] Согласно одному данному в качестве примера варианту выполнения настоящего изобретения, предложен способ управления временем перехода через диапазон скоростей, опасных для второго детандера, который принимает поток текучей среды от первого детандера, путем автоматического смещения скорости второго детандера. Способ включает установку скорости второго детандера меньшей текущей скорости первого детандера, когда текущая скорость первого детандера находится в пределах диапазона применения смещения и текущая скорость второго детандера увеличивается и является меньшей, чем первое значение скорости, или уменьшается и является меньшей, чем второе значение скорости. Способ также включает установку скорости второго детандера большей, чем текущая скорость первого детандера, когда текущая скорость первого детандера находится в пределах диапазона применения смещения и текущая скорость второго детандера растет и является большей, чем первое значение скорости, или уменьшается и является большей, чем второе значение скорости.
[0013] Согласно другому варианту выполнения настоящего изобретения, контроллер включает интерфейс и процессорный блок. Интерфейс принимает информацию о текущей скорости первого детандера и выдает устанавливаемую скорость для второго детандера, при этом второй детандер принимает поток текучей среды с выхода первого детандера. Процессорный блок связан с интерфейсом и определяет устанавливаемую скорость второго детандера, когда текущая скорость первого детандера находится в пределах диапазона применения смещения. Процессорный блок определяет устанавливаемую скорость второго детандера так, чтобы она была меньше текущей скорости первого детандера, когда текущая скорость второго детандера растет и является меньшей, чем первое значение скорости, или уменьшается и является меньшей, чем второе значение скорости. Кроме того, процессорный блок определяет устанавливаемую скорость второго детандера так, чтобы она была больше, чем текущая скорость первого детандера, когда текущая скорость второго детандера растет и является большей, чем первое значение скорости, или уменьшается и является большей, чем второе значение скорости.
[0014] Согласно еще одному варианту выполнения настоящего изобретения, устройство, выполненное из электронных компонентов, преобразует сигнал скорости первого детандера, включающий текущую скорость первого детандера, в сигнал скорости второго детандера, включающий устанавливаемую скорость второго детандера, при этом второй детандер принимает поток текучей среды от первого детандера. Устройство включает блок формирования сигнала, предназначенный для формирования сигнала скорости второго детандера, и блок формирования сигнала переключения смещения, соединенный с блоком формирования сигнала скорости второго детандера и предназначенный для формирования сигнала переключения смещения. Блок формирования сигнала скорости второго детандера включает суммирующую/вычитающую схему, предназначенную для вычитания сигнала значения смещения из сигнала скорости первого детандера, первый тракт, предназначенный для подачи сигнала скорости первого детандера в суммирующую/вычитающую схему, второй тракт, предназначенный для формирования сигнала отрицательного смещения, третий тракт, предназначенный для формирования сигнала положительного смещения, и переключатель, связанный с выходами второго тракта и третьего тракта для соединения второго тракта или третьего тракта с суммирующей/вычитающей схемой, в зависимости от сигнала переключения смещения. Второй тракт и третий тракт формируют нулевой сигнал, когда текущая скорость первого детандера лежит вне диапазона применения смещения. Блок формирования сигнала переключения смещения генерирует сигнал переключения смещения, предписывающий присоединить второй тракт, если текущая скорость второго детандера меньше, чем некоторое первое значение, предписывает присоединить третий тракт, если текущая скорость второго детандера больше, чем некоторое второе значение, и сохраняет текущее соединение, если текущая скорость второго детандера больше, чем указанное первое значение, и меньше, чем указанное второе значение.
[0015] Согласно еще одному варианту выполнения настоящего изобретения, предложен считываемый компьютером носитель, хранящий исполняемые коды, которые при выполнении их процессором заставляют компьютер реализовать способ управления временем перехода через диапазон скоростей, опасных для второго детандера, путем автоматического смещения скорости второго детандера, который принимает поток текучей среды с выхода первого детандера. Способ включает установку скорости второго детандера меньшей, чем текущая скорость первого детандера, когда текущая скорость первого детандера находится в пределах диапазона применения смещения и текущая скорость второго детандера растет и является меньшей, чем первое значение скорости, или уменьшается и является меньшей, чем второе значение скорости. Кроме того, способ включает такую установку скорости второго детандера, что она больше текущей скорости первого детандера, когда текущая скорость первого детандера лежит в пределах диапазона применения смещения и текущая скорость второго детандера растет и является большей, чем первое значение скорости, или уменьшается и является большей, чем второе значение скорости.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0016] Сопровождающие чертежи, которые включены в настоящее описание и составляют его часть, иллюстрируют один или большее количество вариантов выполнения настоящего изобретения и, совместно с описанием, поясняют эти варианты выполнения настоящего изобретения. На чертежах:
[0017] на фиг.1 схематично показан обычный узел из двух детандеров;
[0018] на фиг.2 схематично показан узел из двух детандеров согласно одному из вариантов выполнения настоящего изобретения;
[0019] на фиг.3 показана последовательность операций способа уменьшения времени перехода через диапазон скоростей вблизи нежелательной скорости, опасной для первого детандера, согласно одному из вариантов выполнения настоящего изобретения;
[0020] на фиг.4 показан график скорости первого и второго детандеров в зависимости от потока текучей среды, согласно данному в качестве примера варианту выполнения настоящего изобретения;
[0021] на фиг.5 схематично показан контроллер согласно одному из вариантов выполнения настоящего изобретения;
[0022] на фиг.6 показана схема, иллюстрирующая электронное устройство согласно другому варианту выполнения настоящего изобретения;
[0023] на фиг.7 показана последовательность операций способа автоматической установки скорости второго детандера, который принимает поток текучей среды с выхода первого детандера, согласно одному из вариантов выполнения настоящего изобретения;
[0024] на фиг.8 показана последовательность операций способа уменьшения времени перехода через диапазон скоростей вблизи нежелательной скорости, опасной для первого детандера, согласно одному из вариантов выполнения настоящего изобретения;
[0025] на фиг.9 показан график скорости первого и второго детандеров в зависимости от потока текучей среды, согласно данному в качестве примера варианту выполнения настоящего изобретения;
[0026] на фиг.10 схематично показан контроллер согласно одному из вариантов выполнения настоящего изобретения;
[0027] на фиг.11 показана схема, иллюстрирующая электронное устройство согласно другому варианту выполнения настоящего изобретения; и
[0028] на фиг.12 показана последовательность операций способа автоматической установки скорости второго детандера, который принимает поток текучей среды с выхода первого детандера, согласно одному из вариантов выполнения настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0029] Последующее описание примеров выполнения настоящего изобретения включает ссылки на сопровождающие чертежи. Одинаковые позиции на различных чертежах обозначают одинаковые или аналогичные элементы. Последующее подробное описание не ограничивает объем изобретения. Объем изобретения определяется формулой изобретения. Для простоты последующие варианты выполнения настоящего изобретения рассмотрены на примере способов и устройств, используемых в системе из двух детандеров, в которых время перехода через диапазон скоростей, опасных для одного из детандеров, уменьшают путем автоматического смещения скорости второго детандера, который принимает поток текучей среды с выхода первого детандера. Однако рассмотренные ниже варианты выполнения настоящего изобретения не ограничены этими системами, но могут быть применены к другим системам, в которых требуется уход из нежелательного диапазона скоростей детандера.
[0030] Повсюду в документе термин "один вариант выполнения настоящего изобретения" или "один из вариантов выполнения настоящего изобретения" означает, что специфический признак, структура или характеристика, описанная в связи с вариантом выполнения настоящего изобретения, включены по меньшей мере в один вариант выполнения раскрытого объекта. Таким образом, фраза "в одном варианте выполнения настоящего изобретения" или "в одном из вариантов выполнения настоящего изобретения" в различных местах настоящего документа не обязательно подразумевает один и тот же вариант выполнения настоящего изобретения. Кроме того, специфические признаки, структуры или характеристики могут быть скомбинированы любым подходящим способом в одном или большем количестве вариантов выполнения настоящего изобретения.
[0031] На фиг.2 схематично показан узел 100 из двух детандеров согласно одному из вариантов выполнения настоящего изобретения. На фиг.2 показан первый детандер 110, второй детандер 120, лопастное колесо 122 первого детандера 110, лопастное колесо 124 второго детандера 120, направление 130 потока, регулятор 140, устанавливающий скорость второго детандера 120 согласно значению скорости, введенному в регулятор, и датчик 150, дающий информацию о текущей скорости первого детандера 110.
[0032] Согласно одному из вариантов выполнения настоящего изобретения, система 100 из двух детандеров на фиг.2 дополнительно включает контроллер 160, установленный между первым детандером 110 и регулятором 140. Однако контроллер 160 может быть установлен в других местах. Специалистам очевидно, что регулятор 140 может быть модифицирован и может включать контроллер 160, или же процессор регулятора 140 может быть выполнен с возможностью выполнения функции контроллера 160.
[0033] Контроллер 160 на фиг.2 принимает информацию о текущей скорости первого детандера 110, например от датчика 150 скорости, и выдает значение скорости в регулятор 140. Регулятор 140 устанавливает скорость второго детандера 120 равной значению скорости, принятому из контроллера 160. Другими словами, можно использовать тот же регулятор, что и в обычной системе 1, показанной на фиг.1, но в отличие от обычной системы, где регулятор 40 принимает текущую скорость первого детандера 10, регулятор 140 системы 100, показанный на фиг.2, принимает значение скорости из контроллера 160. Это значение скорости может быть равно текущей скорости первого детандера 110, а может и не быть, как рассмотрено ниже.
[0034] На фиг.3 показана последовательность операций способа уменьшения времени перехода через диапазон скоростей вблизи нежелательной скорости, опасной для первого детандера, путем автоматического смещения скорости второго детандера, который принимает поток текучей среды с выхода первого детандера, согласно одному из вариантов выполнения настоящего изобретения. Ниже графики на фиг.4, где представлены скорости первого детандера и второго детандера в зависимости от потока газа, используются для описания способа, иллюстрируемого на фиг.3.
[0035] По оси Y графика, показанного на фиг.4, отложены значения скорости, выраженные в некоторых единицах угловой скорости, например в оборотах в минуту (rpm). На оси Y отложены четыре репрезентативных значения скорости, которые удовлетворяют следующим соотношениям: SPEED_LL<SPEED_L<SPEED_H<SPEED_HH. Нежелательная скорость первого детандера (UNDESIRABLE SPEED) представляет собой значение, лежащее в нежелательном диапазоне скоростей, между SPEED_LL и SPEED_H. Нежелательный диапазон может быть определен изготовителем или задан заранее на основе тестирования и опыта.
[0036] Когда текущая скорость первого детандера находится в диапазоне применения смещения, между SPEED_LL и SPEED_HH, скорость второго детандера устанавливают со смещением, то есть отличающейся от текущей скорости первого детандера. Когда текущая скорость первого детандера находится вне диапазона применения смещения, скорость второго детандера устанавливают равной текущей скорости первого детандера.
[0037] В дополнение к определению нежелательного диапазона, изготовители детандеров обычно определяют максимальное время (МАХ_ТIМЕ), которое представляет собой максимальный временной интервал, в течение которого детандер может работать на скоростях, лежащих в нежелательном диапазоне. Изготовители детандеров также обычно определяют максимальную допустимую скорость изменения скорости (SPEED_RATE) для детандера (например, для второго детандера).
[0038] Кроме того, изготовитель (если система из двух детандеров поставляется как одно целое одним изготовителем) или инженер-технолог (если система из двух детандеров собрана пользователем) определяет максимальную допустимую разность скоростей (SPEED_DIFF) между скоростями первого и второго детандеров. Таким образом, в системе с двумя детандерами (например, в системе 100 на фиг.2) абсолютная разность между скоростью первого детандера и скоростью второго детандера должна быть при нормальных условиях функционирования меньше, чем максимальное значение SPEED_DIFF. Для возможности управления системой, например, для соблюдения ограничения на эту максимальную допустимую разность скоростей (SPEED_DIFF), максимальная допустимая разность скоростей (SPEED_DIFF) должна быть больше, чем SPEED_H - SPEED_L.
[0039] Абсолютные значения, соответствующие репрезентативным значениям скорости, отложенным по оси Y графика на фиг.3, зависят от конкретных систем. Данный в качестве примера набор значений для рассмотренных выше значений скорости составляет: SPEED_LL=16600 оборотов в минуту, SPEED_L=17600 оборотов в минуту, UNDESIRABLE_SPEED=18000 оборотов в минуту, SPEED_H=18400 оборотов в минуту и SPEED_HH=19400 оборотов в минуту.
[0040] На фиг.4 по оси Х отложен поток газа через детандеры. На фиг.4 скорости детандеров зависят от потока газа линейно. Однако линейная зависимость дана только в качестве примера функции связи скоростей и потока газа. Функция связи может представлять другую функциональную зависимость, но в общем случае с увеличением потока газа скорости детандеров увеличиваются, а с уменьшением потока газа скорости детандеров уменьшаются.
[0041] Когда система начинает работу (то есть газ начинает течь через детандеры), скорость детандеров становится положительной (то есть большей, чем 0 оборотов в минуту) (шаг S300 на фиг.3). При малом потоке газа, пока скорость детандеров ниже диапазона применения смещения, скорость второго детандера (Ref_B) устанавливают (шаг S305) (например регулятором 140 на основе сигнала, принятого из контроллера 160 на фиг.2) равной текущей скорости первого детандера (Ехр_А). Значение текущей скорости первого детандера может быть принято контроллером 160 на фиг.2 от датчика скорости, например Sv1 150 на фиг.2. Однако информация о текущей скорости первого детандера может быть принята из других источников информации, таких как пульт управления, получена из оценки, вычислена и т.д.
[0042] Пока текущая скорость первого детандера (например 110 на фиг.2) лежит вне диапазона применения смещения (то есть меньше, чем SPEED_LL, или больше, чем SPEED_HH), скорость второго детандера (например 120 на фиг.2) устанавливают (например регулятором 140 на основе значения, принятого из контроллера 160 на фиг.2) равной текущей скорости первого детандера; это ситуации, которые соответствуют сегментам 410 и 411 нафиг.4.
[0043] Если сравнение текущей скорости первого детандера с SPEED_LL на шаге S310 на фиг.3 свидетельствует, что текущая скорость первого детандера меньше, чем SPEED_LL (ветвь НЕТ из блока S310), скорость (Ref_B) второго детандера устанавливают (шаг S305) равной текущей скорости (Ехр_А) первого детандера.
[0044] При более сильном потоке газа, когда текущая скорость (Ехр_А) первого детандера становится больше, чем SPEED_LL (ветвь ДА из блока S310), скорость (Ref_B) второго детандера устанавливают (шаг S320) равной значению, большему текущей скорости первого детандера. Более конкретно, скорость второго детандера устанавливают равной Ref_B=Exp_A+(Ехр_А-SPEED_LL)×GAIN, где GAIN (УСИЛЕНИЕ) - заранее заданная положительная величина. Величина (Exp_A-SPEED_LL)× GAIN представляет собой положительное смещение, добавляемое к скорости второго детандера. Таким образом, это положительное смещение пропорционально разности между текущей скоростью первого детандера и нижним пределом диапазона применения смещения (то есть SPEED_LL). В других приложениях положительное смещение может быть определено другим способом. В общем случае это положительное смещение может зависеть от текущей скорости (Ехр_А) первого детандера, нижнего значения (SPEED_LL) диапазона применения смещения, нижнего значения (SPEED_L) нежелательного диапазона скоростей, значения GAIN и т.д., например, f(Exp_A,SPEED_LL,SPEED_L, GAIN).
[0045] Параметр GAIN может быть заранее определен как отношение максимальной допустимой разности (SPEED_DIFF) скоростей и разности SPEED_H-SPEED_L. Например, GAIN=2.
[0046] На шаге S320, когда скорость второго детандера смещена, контроллер (например, 160 на фиг.2) выдает значение скорости так, чтобы текущая скорость изменения скорости второго детандера была меньше, чем максимальная скорость (SPEED_RATE) изменения скорости для второго детандера. Максимальная скорость (SPEED_RATE) изменения скорости для второго детандера может принимать значение, например, между 20 и 50 об/мин/с, например 40 об/мин/с. Таким образом, даже если газовой поток возрастает с большой скоростью, скорость второго детандера будет увеличиваться со временем постепенно, удовлетворяя требованиям на максимально допустимую скорость (SPEED_RATE) изменения скорости.
[0047] Благодаря положительно смещенной скорости второго детандера, распределение падения давления в системе может измениться по сравнению с состоянием, когда никакое смещение не применено, хотя полное падение давления может остаться по существу таким же. Таким образом, текущая скорость первого детандера для данного потока газа становится меньше, чем значение текущей скорости, которую имел бы первый детандер, если бы никакого смещения не было применено к скорости второго детандера при данном потоке газа.
[0048] До тех пор, пока сравнение текущей скорости (Ехр_А) первого детандера со SPEED_L на шаге S330 свидетельствует, что текущая скорость первого детандера меньше, чем SPEED_L (ветвь НЕТ из блока S330), а сравнение текущей скорости первого детандера с SPEED_LL на шаге S310 свидетельствует, что текущая скорость первого детандера больше, чем SPEED_LL, скорость (Ref_B) второго детандера устанавливают с положительным смещением (то есть, она положительно смещена).
[0049] Зависимость скорости второго детандера от потока, когда скорость второго детандера положительно смещена, соответствует сегменту 420 на фиг.4, а текущая скорость первого детандера в этой ситуации соответствует сегменту 421 на фиг.4. Отметим, что при применении положительного смещения к скорости второго детандера (как показано сегментом 420) текущая скорость первого детандера (как показано сегментом 421) остается меньшей, чем SPEED_L, и, таким образом, вне нежелательного диапазона скоростей.
[0050] Если сравнение текущей скорости первого детандера со SPEED_L на шаге S330 свидетельствует, что текущая скорость первого детандера больше, чем SPEED_L (ветвь ДА из блока S330), контроллер 160 выдает (шаг S340) в регулятор 140 значение скорости, меньшее, чем текущая скорость первого детандера, и ожидает (шаг S345) в течение времени задержки. Более конкретно, на шаге S340 скорость второго детандера устанавливают равной Ref_B=Exp_A+(Exp_A-SPEED_HH)×GAIN. Отрицательное смещение (Exp_A-SPEED_HH)×GAIN представляет собой отрицательную величину, и поэтому Ref_B устанавливается на значение, меньшее чем Ехр_А.
[0051] Переход от положительного смещения скорости второго детандера к отрицательному смещению скорости второго детандера может быть выполнен с соблюдением ограничения, связанного с максимальной скоростью изменения скорости. Таким образом, скорость изменения скорости может поддерживаться меньшей, чем максимальное значение скорости (SPEED_RATE) изменения скорости. Переход с соблюдением ограничения, связанного с максимальной скоростью изменения скорости, может привести к необходимости выполнения промежуточных шагов, прежде чем будет достигнуто новое целевое значение скорости второго детандера. Поэтому на шаге S345 производят задержку. При соблюдении этой задержки система достигает целевого состояния (например, текущая скорость первого детандера становится больше, чем SPEED_H, в сегменте 441 на фиг.4), прежде чем рассматривается возможность установки скорости второго детандера другим способом.
[0052] С учетом того, что скорости первых и вторых детандеров связаны с потоком газа, этот переход происходит тогда, когда поток газа превышает значение TRANSITION FLOW (переходное значение потока). Это значение TRANSITION FLOW может быть или определено путем вычисления, или получено из экспериментов над системой с двумя детандерами. Значение TRANSITION FLOW может зависеть от состава газа и эффективности детандеров, которая может изменяться со временем. Никакого непосредственного измерения потока газа не требуется, поскольку значение TRANSITION FLOW - это значение потока, при котором, когда скорость второго детандера установлена положительно смещенной, текущая скорость первого детандера становится равной нижнему пределу SPEED_L нежелательного диапазона скоростей. Если скорость второго детандера будет затем установлена отрицательно смещенной, даже если поток газа будет поддерживаться при значении TRANSITION FLOW, скорость первого детандера увеличится до верхнего предела SPEED_H нежелательного диапазона скоростей.
[0053] Этот переход от положительного смещения скорости второго детандера к отрицательному смещению скорости второго детандера может изменить распределение падения давления в системе из двух детандеров, что определит изменение текущей скорости первого детандера до значения, равного или превышающего SPEED_H в сегменте 441 на фиг.4. Таким образом, когда изменение завершено, текущая скорость первого детандера должна оказаться вне нежелательного диапазона скоростей. Задержка на шаге S345 позволяет системе завершить переход.
[0054] В некоторых вариантах выполнения настоящего изобретения, если после задержки на шаге S345 текущая скорость первого детандера меньше, чем SPEEDJ4, хотя поток газа превышает или равен значению TRANSITION FLOW, может быть выдан сигнал тревоги (например, контроллером 160 на фиг.2).
[0055] Поскольку вероятно, что переход от положительного смещения скорости второго детандера к отрицательному смещению скорости второго детандера происходит одновременно с увеличением потока газа, текущая скорость первого детандера во время перемещения показана на фиг.4 штриховой дугой 431, а скорость второго детандера показана на фиг.4 штриховой дугой 430.
[0056] До тех пор, пока, согласно сравнению на шаге S350, текущая скорость первого детандера остается большей, чем SPEED_H (ветвь ДА из блока S350), но, согласно сравнению на шаге S360, меньшей, чем SPEED_HH (ветвь НЕТ из блока S360), скорость второго детандера устанавливают (шаг S355) с отрицательным смещением, т.е. Ref_B=Exp_A+(Exp_A-SPEED_HH)×GAIN.
[0057] В этой ситуации зависимость скорости второго детандера от потока соответствует сегменту 440 на фиг.4, а текущая скорость первого детандера в этой ситуации соответствует сегменту 441 на фиг.4. Отметим, что при применении отрицательного смещения к скорости второго детандера (как показано сегментом 440), текущая скорость первого детандера остается большей, чем SPEED_H, и, таким образом, вне нежелательного диапазона скоростей (как показано сегментом 441 на фиг.4).
[0058] Когда, согласно сравнению на шаге S360, текущая скорость первого детандера больше, чем SPEED_HH (ветвь ДА из блока S360), скорость второго детандера устанавливают (шаг S365) равной текущей скорости первого детандера.
[0059] Если, согласно сравнению на шаге S350, текущая скорость первого детандера меньше, чем SPEED_H (ветвь НЕТ из блока S350), скорость второго детандера больше не смещают в отрицательном направлении, а вновь смещают (S370) в положительном направлении (Ref_B=Exp_A+(Exp_A-SPEED_LL)×GAIN). Чтобы избежать перескоков системы вперед и назад между положительным и отрицательным смещениями скорости второго детандера, переход от положительного к отрицательному смещению скорости второго детандера и переход от отрицательного к положительному смещению скорости второго детандера происходит по существу при одном и том же значении TRANSITION FLOW, если зависимости скорости от потока для двух детандеров считать линейными в соответствующих диапазонах скоростей перехода.
[0060] В процессе этого перехода от отрицательного смещения скорости второго детандера к положительному смещению скорости второго детандера, может соблюдаться ограничение, заключающееся в том, что скорость изменения скорости должна быть меньше, чем максимальное значение скорости изменения. Новое примененное положительное смещение скорости определяет изменение распределения падения давления в системе из двух детандеров. Текущая скорость первого детандера уменьшается до значения, равного или меньшего, чем SPEED_L. Таким образом, как только переход от отрицательного смещения скорости второго детандера к положительному смещению скорости второго детандера завершен (с учетом задержки на ограничение, связанное со скоростью изменения скорости), текущая скорость первого детандера оказывается вне нежелательного диапазона скоростей. Чтобы система смогла достигнуть этого состояния, имеет место задержка на шаге в S375, аналогичная задержке, производимой на шаге S345. Задержки на шагах S345 и S375 на фиг.3 могут быть равными или могут иметь различные значения. Эти задержки могут быть равными МАХ_ТIМЕ. Данное в качестве примера значение составляет 180 секунд, но могут использоваться другие значения.
[0061] В некоторых вариантах выполнения настоящего изобретения, если после задержки на шаге S345 текущая скорость первого детандера больше, чем SPEED_L, хотя поток газа меньше или равен значению TRANSITION FLOW, может быть выдан сигнал тревоги (например, контроллером 160 на фиг.2).
[0062] Поскольку вероятно, что переход от отрицательного смещения скорости второго детандера к положительному смещению скорости второго детандера происходит одновременно с уменьшением потока газа, текущая скорость первого детандера во время перемещения показана на фиг.4 штриховой дугой 451, а скорость второго детандера показана на фиг.4 штриховой дугой 450.
[0063] После перехода, если поток газа таков, что текущая скорость первого детандера остается ниже, чем SPEED_L, согласно результатам сравнения на шаге S330 (ветвь НЕТ из блока S330), и текущая скорость первого детандера больше, чем SPEED_LL, согласно результатам сравнения на шаге S310 (ветвь ДА из блока S310), скорость второго детандера устанавливают (шаг S320) с положительным смещением и т.д.
[0064] Согласно способу, показанному на фиг.3 и описанному со ссылкой на фиг.4, текущая скорость первого детандера меняется, проходя через нежелательный диапазон с такой скоростью, какую позволяет значение максимальной скорости изменения скорости, когда поток газа проходит через значение TRANSITION FLOW. Поэтому время перехода через диапазон скоростей, которые опасны для первого детандера, уменьшается по сравнению с тем, когда скорости детандера являются равными и связанными только со скоростью, с которой изменяется поток газа.
[0065] Согласно одному из вариантов выполнения настоящего изобретения, как показано на фиг.5, контроллер 500 (например, контроллер 160 на фиг.2) включает интерфейс 510 и процессорный блок 520. Контроллер может быть связан с системой из двух детандеров (например, 100 на фиг.2), в которой первый детандер (например, 110 на фиг.2) выдает газ во второй детандер (например, 120 на фиг.2), при этом в каждом из первого и второго детандеров имеются лопастные колеса (например, 122 и 124 на фиг.2), вращающиеся со скоростями, связанными с потоком газа, проходящим через систему из двух детандеров.
[0066] Интерфейс 510 способен принимает информацию о текущей скорости первого детандера и выдает устанавливаемую скорость второго детандера (например, в регулятор 140 на фиг.2).
[0067] Процессорный блок 520 может быть связан с интерфейсом 510 и может определять устанавливаемую скорость второго детандера на основе процесса, описанного выше со ссылками на фиг.3 и 4. Процессорный блок 520 может определить устанавливаемую скорость второго детандера так, чтобы она была больше, чем текущая скорость первого детандера, когда текущая скорость первого детандера находится в пределах диапазона применения смещения (например, между SPEED_LL и SPEED_HH, как показано на фиг.4) и поток текучей среды меньше, чем заранее заданное значение потока (например, TRANSIENT FLOW на фиг.4). В этом случае устанавливаемая скорость второго детандера равна сумме текущей скорости первого детандера и положительного смещения.
[0068] Процессорный блок 520 может определить устанавливаемую скорость второго детандера так, чтобы она была меньше, чем текущая скорость первого детандера, когда поток текучей среды больше, чем заранее заданное значение, а текущая скорость первого детандера находится в пределах диапазона применения смещения. Таким образом, в этом случае устанавливаемая скорость второго детандера равна разности между текущей скоростью первого детандера и отрицательным смещением.
[0069] В одном из вариантов выполнения настоящего изобретения процессорный блок 520 может дополнительно сравнивать текущую скорость с первым значением скорости (например SPEED_L на фиг.4), чтобы определить, увеличивается ли поток текучей среды и достигает ли заранее заданного значения потока, когда текущая скорость увеличивается и достигает первого значения скорости. Кроме того, процессорный блок 520 может сравнивать текущую скорость со вторым значением скорости (например SPEED_H на фиг.4), чтобы определить, уменьшается ли поток текучей среды и достигает ли заданного значения потока, когда текущая скорость уменьшается и достигает второго значения скорости. Диапазон скоростей, которые опасны для первого детандера, может лежать между первым значением скорости и вторым значением скорости и предпочтительно входит в диапазон применения смещения.
[0070] В еще одном варианте выполнения настоящего изобретения процессорный блок 520 определяет устанавливаемую скорость второго детандера так, чтобы она была равна текущей скорости первого детандера, когда текущая скорость первого детандера лежит вне диапазона применения смещения.
[0071] В еще одном варианте выполнения настоящего изобретения процессорный блок 520 генерирует сигнал тревоги, когда текущая скорость первого детандера остается в пределах диапазона скоростей, которые опасны для первого детандера, в течение большего времени, чем заранее заданный временной интервал.
[0072] В еще одном варианте выполнения настоящего изобретения процессорный блок 520 определяет устанавливаемую скорость второго детандера так, что разность между устанавливаемой скоростью и текущей скоростью первого детандера пропорциональна разности между текущей скоростью и самым низким значением скорости (например, SPEED_LL на фиг.4) в диапазоне применения смещения, когда поток текучей среды меньше, чем заранее заданное значение потока.
[0073] В еще одном варианте выполнения настоящего изобретения процессорный блок 520 определяет устанавливаемую скорость второго детандера так, что разность между текущей скоростью первого детандера и устанавливаемой скоростью второго детандера, пропорциональна разности между самым высоким значением скорости (например, SPEED_HH на фиг.4) в диапазоне применения смещения и текущей скоростью первого детандера, когда поток текучей среды больше, чем заранее заданное значение потока.
[0074] В еще одном варианте выполнения настоящего изобретения процессорный блок 520 определяет устанавливаемую скорость второго детандера так, чтобы скорость изменения скорости была ниже, чем заранее заданное максимальное значение скорости изменения скорости.
[0075] В еще одном варианте выполнения настоящего изобретения процессорный блок 520 определяет устанавливаемую скорость второго детандера для множества диапазонов применения смещения и соответствующих заранее заданных значений потока текучей среды.
[0076] Согласно другому варианту выполнения настоящего изобретения, на фиг.6 показана схема электронного устройства 600, предназначенного для реализации способа, показанного на фиг.3. Электронное устройство 600 выполнено из электронных блоков с возможностью преобразования сигнала скорости первого детандера, включающего текущую скорость (Ехр_А) первого детандера, в сигнал скорости второго детандера, включающий скорость (Ref_B), которая будет установлена во втором детандере.
[0077] Электронное устройство 600 содержит блок 610 формирования сигнала второго детандера и блок 620 формирования сигнала переключения смещения, при этом оба блока принимают сигнал скорости (Ехр_А) первого детандера.
[0078] Блок 610 формирования сигнала второго детандера содержит компоненты, установленные вдоль трех трактов, для выполнения различных функций. Компоненты вдоль первого тракта 630 передают сигнал скорости первого детандера в суммирующую схему 632. Компоненты вдоль второго тракта 634 генерируют сигнал, пропорциональный разности между текущей скоростью первого детандера и нижним пределом (SPEED_LL) диапазона применения смещения. Компоненты вдоль третьего тракта 635 генерируют сигнал, пропорциональный разности между верхним пределом (SPEED_HH) диапазона применения смещения и текущей скоростью первого детандера.
[0079] Второй тракт 634 и третий тракт 635 содержат соответствующие схемы 636 и 637 фиксации уровня. Благодаря схемам 636 и 637 фиксации уровня, сигналы на выходах второго тракта 634 и третьего тракта 635 соответственно имеют значение 0,0, если текущая скорость (Ехр_А) первого детандера находится вне диапазона применения смещения (то есть больше, чем SPEED_HH, и меньше, чем SPEED_LL). Кроме того, благодаря схемам 636 и 637 фиксации уровня, сигналы с выходов второго тракта 634 и третьего тракта 635 не превышают по абсолютной величине максимально допустимую разность (SPEED_DIFF) скоростей. Таким образом, положительное смещение на выходе второго тракта 634 представляет собой положительную величину, пропорциональную разности между текущей скоростью первого детандера и нижним пределом (SPEED_LL) диапазона применения смещения, если эта разность больше, чем 0 (иначе на выходе имеем 0). Положительное смещение также ограничено так, что оно меньше, чем максимальная допустимая разность (SPEED_DIFF) скоростей.
[0080] Отрицательное смещение на выходе третьего тракта 635 представляет собой отрицательную величину, пропорциональную разности между текущей скоростью первого детандера и верхним пределом (SPEED_HH) диапазона применения смещения, если эта разность меньше, чем 0 (иначе на выходе имеем 0). Кроме того, отрицательное смещение также ограничено по абсолютному значению так, что оно меньше, чем максимальная допустимая разность (SPEED_DIFF) скоростей.
[0081] Блок 610 формирования сигнала второго детандера дополнительно содержит переключатель 638, который передает сигнал смещения, представляющий собой или сигнал положительного смещения, принятый из первого тракта 634, или сигнал отрицательного смещения, принятый из второго тракта 635, в зависимости от сигнала переключения смещения, принятого из блока 620 формирования сигнала переключения смещения. Затем сигнал смещения с выхода переключателя 638 умножается на параметр GAIN в компоненте 640 усиления. Умноженный сигнал смещения с выхода компонента 640 усиления затем поступает в фильтрующий компонент 642, который, в случае необходимости, ограничивает умноженный сигнал смещения так, чтобы текущая скорость изменения скорости не превышала максимальную скорость изменения устанавливаемой скорости второго детандера. Результирующий сигнал смещения с выхода фильтра 642 прибавляется к сигналу скорости первого детандера в суммирующей схеме 632, а затем по линии 633 поступает во второй детандер 120 в виде сигнала Ref_B.
[0082] Блок 620 формирования сигнала смещения содержит два тракта 650 и 652, которые соединены с входом триггерной схемы 654. Из тракта 650 в триггерную схему поступает "1", или высокий сигнал, если текущая скорость первого детандера больше, чем нижний предел (SPEED_L) нежелательного диапазона скоростей, которые опасны для первого детандера. Из тракта 652 в триггерную схему поступает "1", или высокий сигнал, если текущая скорость первого детандера меньше, чем верхний предел (SPEED_H) нежелательного диапазона скоростей, которые опасны для первого детандера. Когда как из тракта 650, так и из тракта 652 поступает "1", или высокий сигнал, текущая скорость первого детандера находится в нежелательном диапазоне во время перехода между состояниями с положительным и отрицательным смещением. Поэтому никакого изменения сигнала переключения смещения на выходе триггерной схемы 654 не происходит. Сигнал переключения смещения с выхода триггерной схемы 654 по шине 655 поступает в переключатель 638. На основе принятого сигнала переключения смещения переключатель 638 соединяет второй тракт 634 с суммирующей схемой 632, если сигнал переключения смещения свидетельствует, что текущая скорость первого детандера остается ниже, чем нижний предел (SPEED_L) нежелательного диапазона скоростей, и соединяет третий тракт 635 с суммирующей схемой 632, если сигнал переключения смещения свидетельствует, что текущая скорость первого детандера остается выше, чем верхний предел (SPEED_H) нежелательного диапазона скоростей. Когда текущая скорость первого детандера становится больше, чем нижний предел (SPEED_L), сигнал переключения смещения с выхода триггерной схемы 654 заставляет переключатель 638 подключить третий тракт 635 (отрицательное смещение), а когда текущая скорость первого детандера становится меньше, чем верхний предел (SPEED_H), сигнал переключения смещения с выхода триггерной схемы 654 заставляет переключатель 638 подключить второй тракт 634 (положительное смещение). Два блока 657 и 659 «И», расположенные перед триггером 654, обеспечивают переключение смещения в правильном направлении и предотвращают фликкер-эффект в блоке 620 формирования сигнала смещения. Таким образом, нет необходимости знать действительное значение потока.
[0083] Кроме того, блок 620 формирования сигнала переключения смещения содержит блок 660 аварийной сигнализации, который выдает сигнал тревоги, когда текущая скорость первого детандера принимает значение, находящееся в нежелательном диапазоне, в течение времени, превышающего заранее заданный временной интервал. Схемы 656 и 658 задержки обеспечивают выполнение шагов S345 и S375, соответственно, показанных на фиг.3.
[0084] Электронное устройство 600 реализует способ, показанный на фиг.3. Когда текущая скорость (Ехр_А) первого детандера находится вне диапазона применения смещения (то есть она меньше, чем SPEED_LL, или больше, чем SPEED_HH), благодаря схемам 636 и 637 фиксации уровня, к сигналу скорости первого детандера в суммирующей схеме 632 прибавляется сигнал 0. Когда текущая скорость (Ехр_А) первого детандера находится в диапазоне применения смещения (то есть она больше, чем SPEED_LL и меньше SPEED_HH), к сигналу скорости первого детандера в суммирующей схеме 632 прибавляется сигнал положительного смещения или сигнал отрицательного смещения.
[0085] Какой именно сигнал - сигнал положительного смещения или сигнал отрицательного смещения - прибавляется к сигналу скорости первого детандера в суммирующей схеме 632, зависит от сигнала переключения смещения, принятого из блока 620 формирования сигнала переключения смещения, описанного выше. Сигнал скорости второго детандера - это сигнал на выходе суммирующей схемы 632.
[0086] На фиг.7 показана последовательность операций для способа автоматической установки скорости второго детандера, который принимает поток текучей среды с выхода первого детандера, для уменьшения времени работы первого детандера на скоростях в нежелательном диапазоне скоростей первого детандера, согласно одному из вариантов выполнения настоящего изобретения.
[0087] Способ 700 включает установку (шаг S710) скорости второго детандера так, чтобы эта скорость была больше, чем текущая скорость первого детандера, когда текущая скорость первого детандера находится в пределах диапазона применения смещения, и текущая скорость первого детандера увеличивается и является меньшей, чем первое значение скорости, или уменьшается и является меньшей, чем второе значение скорости.
[0088] Способ 700 дополнительно включает такую установку (шаг S720) скорости второго детандера, чтобы она была меньше, чем текущая скорость первого детандера, когда текущая скорость первого детандера находится в пределах диапазона применения смещения, текущая скорость первого детандера увеличивается и является большей, чем первое значение скорости, или уменьшается и является большей, чем второе значение скорости.
[0089] На фиг.8 показана последовательность операций для способа уменьшения времени перехода через диапазон скоростей, которые опасны для второго детандера, путем автоматического смещения скорости второго детандера, который принимает поток текучей среды с выхода первого детандера, согласно одному из вариантов выполнения настоящего изобретения. Ниже графики на фиг.9, где представлены скорости первого и второго детандеров в зависимости от потока газа, используются для описания способа, иллюстрируемого на фиг.8. Разница между способом на фиг.3 и способом на фиг.8 состоит в том, что первый способ направлен на уменьшение времени перехода через диапазон скоростей вблизи нежелательной скорости, которая опасна для первого детандера, в то время как второй способ направлен на уменьшение времени перехода через диапазон скоростей вблизи нежелательной скорости, которая опасна для второго детандера.
[0090] По оси Y графика, показанного на фиг.9, отложены значения скорости, выраженные в некоторых единицах угловой скорости, например в оборотах в минуту (rpm). На оси Y отложены четыре репрезентативных значения скорости, которые удовлетворяют следующим соотношениям:
SPEED_LL<SPEED_L<SPEED_H<SPEED_HH. Нежелательная скорость первого детандера (UNDESIRABLE SPEED) представляет собой значение, лежащее в нежелательном диапазоне скоростей, между SPEED_L и SPEED_H. Нежелательный диапазон может быть определен изготовителем или задан заранее на основе тестирования и опыта.
[0091] Когда текущая скорость первого детандера находится в диапазоне применения смещения, между SPEED_LL и SPEED_HH, скорость второго детандера устанавливают со смещением, то есть отличающейся от текущей скорости первого детандера. Когда текущая скорость первого детандера находится вне диапазона применения смещения, скорость второго детандера устанавливают равной текущей скорости первого детандера.
[0092] В дополнение к определению нежелательного диапазона изготовители детандеров обычно определяют максимальное время (МАХ_ТIМЕ), которое представляет собой максимальный временной интервал, в течение которого детандер может работать на скоростях, лежащих в нежелательном диапазоне. Изготовители детандеров также обычно определяют максимальную допустимую скорость изменения скорости (SPEED_RATE) для детандера (например, первого детандера).
[0093] Для возможности управления системой, например для удовлетворения ограничения по максимальной допустимой скорости (SPEED_RATE) изменения скорости и ограничения по нежелательному времени (МАХ_ТIМЕ), максимальная допустимая скорость (SPEED_RATE) изменения скорости должна быть больше, чем (SPEED_H - SPEED_L)/MAX_TIME.
[0094] Кроме того, изготовитель (если система из двух детандеров поставляется как одно целое одним изготовителем) или инженер-технолог (если система из двух детандеров собрана пользователем) определяет максимальную допустимую разность скоростей (SPEED_DIFF) между скоростями первого и второго детандеров. Таким образом, в системе с двумя детандерами (например, системе 100 на фиг.2), абсолютная разность между скоростью первого детандера и скоростью второго детандера должна быть, для нормальных условий функционирования, меньше, чем максимальное значение SPEED_DIFF. Для возможности управления системой, например, для соблюдения ограничения на эту максимальную допустимую разность скоростей (SPEED_DIFF), максимальная допустимая разность скоростей (SPEED_DIFF) должна быть больше, чем SPEED_H - SPEED_L.
[0095] На фиг.9 по оси Х отложен поток газа через детандеры. На фиг.9 скорости детандеров зависят от потока газа линейно. Однако линейная зависимость дана только в качестве примера функции связи скоростей и потока газа. У функции связи может быть другая функциональная зависимость, но в общем случае, с увеличением потока газа скорости детандеров увеличиваются, а с уменьшением потока газа скорости детандеров уменьшаются.
[0096] Когда система начинает работу (то есть газ начинает течь через детандеры), скорость детандеров становится положительной (то есть большей, чем 0 оборотов в минуту) (S800 на фиг.8). При малом потоке газа, пока скорость детандеров остается ниже диапазона применения смещения, скорость второго детандера (Ref_B) устанавливают (шаг S805) (например регулятором 140 на основе сигнала, принятого из контроллера 160 на фиг.2) равной текущей скорости первого детандера (Ехр_А). Значение текущей скорости первого детандера может быть принято контроллером 160 на фиг.2 от датчика скорости, например Sv1 150 на фиг.2. Однако информация о текущей скорости первого детандера может быть принята из других источников информации, таких как пульт управления, получена из оценки, вычислена и т.д.
[0097] Пока текущая скорость первого детандера (например, 110 на фиг.2) лежит вне диапазона применения смещения (то есть меньше, чем SPEED_LL, или больше, чем SPEEDJ4H), скорость второго детандера (например, 120 на фиг.2) устанавливают (например регулятором 140 на основе значения, принятого из контроллера 160 на фиг.2) равной текущей скорости первого детандера; это ситуации, которые соответствуют сегментам 910 и 911 нафиг.9.
[0098] Если сравнение текущей скорости первого детандера со SPEED_LL на шаге S310 на фиг.8 свидетельствует, что текущая скорость первого детандера меньше, чем SPEED_LL (ветвь НЕТ из блока S810), скорость (Ref_B) второго детандера устанавливают (шаг S805) равной текущей скорости (Ехр_А) первого детандера.
[0099] При более сильном потоке газа, когда текущая скорость (Ехр_А) первого детандера становится больше, чем SPEED_LL (ветвь ДА из блока S810), скорость (Ref_B) второго детандера устанавливают (шаг S820) равной значению, меньшему текущей скорости первого детандера. Более конкретно, скорость второго детандера устанавливают равной Ref_B=Exp_A-(Ехр_А-SPEED_LL)×GAIN, где GAIN - заранее заданная положительная величина. Величина (Exp_A-SPEED_LL)×GAIN представляет собой отрицательное смещение, добавляемое к скорости второго детандера. Таким образом, это отрицательное смещение пропорционально разности между текущей скоростью первого детандера и нижним пределом диапазона применения смещения (то есть SPEED_LL). В других приложениях отрицательное смещение может быть определено другим способом. В общем случае это отрицательное смещение может зависеть от текущей скорости (Ехр_А) первого детандера, нижнего значения (SPEED_LL) диапазона применения смещения, нижнего значения (SPEED_L) нежелательного диапазона скоростей, значения GAIN и т.д., например, f(Exp_A,SPEED_LL,SPEED_L,GAIN).
[00100] Параметр GAIN может быть заранее задан таким, чтобы быть равным единице минус отношение разности SPEED_H-SPEED_L и максимальной допустимой разности (SPEED_DIFF) скоростей. В данном примере GAIN=0,7.
[00101] На шаге S820, когда скорость второго детандера смещена, контроллер (например, 160 на фиг.2) выдает значение скорости так, чтобы текущая скорость изменения скорости второго детандера была меньше, чем максимальная скорость (SPEED_RATE) изменения скорости для второго детандера. Максимальная скорость (SPEED_RATE) изменения скорости для второго детандера может принимать значение, например, между 20 и 50 об/мин/с. Таким образом, даже если поток газа возрастает с большой скоростью, скорость второго детандера будет увеличиваться со временем постепенно, удовлетворяя требованиям на максимально допустимую скорость (SPEED_RATE) изменения скорости.
[00102] Благодаря отрицательно смещенной скорости второго детандера, распределение падения давления в системе может измениться по сравнению с состоянием, когда никакое смещение не применено, хотя полное падение давления может остаться по существу таким же. Таким образом, текущая скорость первого детандера для данного потока газа становится меньше, чем значение текущей скорости, которую имел бы первый детандер, если бы никакого смещения не было применено к скорости второго детандера при данном потоке газа.
[00103] До тех пор, пока сравнение текущей скорости (Ехр_В) второго детандера со SPEED_L на шаге 830 свидетельствует, что скорость второго детандера меньше, чем SPEED_L (ветвь НЕТ из блока S830), а сравнение текущей скорости первого детандера с SPEED_LL на шаге S810 свидетельствует, что текущая скорость первого детандера больше, чем SPEED_LL, скорость (Ref_B) второго детандера устанавливают с отрицательным смещением (то есть, она отрицательно смещена). Текущую скорость второго детандера можно измерить датчиком, или ее можно считать равной последней установленной скорости (Ref_B) второго детандера.
[00104] Зависимость скорости второго детандера от потока, когда скорость второго детандера отрицательно смещена, соответствует сегменту 920 на фиг.9, а текущая скорость первого детандера в этой ситуации соответствует сегменту 921 на фиг.9. Отметим, что при применении отрицательного смещения к скорости второго детандера (как показано сегментом 920) текущая скорость второго детандера (как показано сегментом 921) остается меньшей, чем SPEED_L, и, таким образом, остается вне нежелательного диапазона скоростей.
[00105] Если сравнение текущей скорости второго детандера со SPEED_L на шаге S830 свидетельствует, что скорость второго детандера больше, чем SPEED_L (то есть, ветвь ДА от блока S830), контроллер 160 выдает (шаг S840) в регулятор 140 значение скорости, которая увеличивается со скоростью изменения скорости, меньшей чем SPEED_RATE, чтобы стать большей, чем текущая скорость первого детандера, и ожидает (шаг S845) в течение времени задержки. Более конкретно, скорость второго детандера устанавливают равной Ref_B=Exp_A-(Exp_A-SPEED_HH)×GAIN. Значение (Exp_A-SPEED_HH)×GAIN отрицательное, и поэтому Ref_B установлено превышающим Ехр_А (то есть скорость второго детандера смещена положительно).
[00106] Переход от отрицательного смещения скорости второго детандера к положительному смещению скорости второго детандера может быть выполнен с соблюдением ограничения, связанного с максимальной скоростью изменения скорости. Таким образом, абсолютное значение скорости изменения скорости может поддерживаться меньшим, чем максимальное значение скорости (SPEED_RATE) изменения скорости.
[00107] С учетом того, что скорости первых и вторых детандеров связаны с потоком газа, этот переход происходит тогда, когда поток газа превышает значение TRANSITION FLOW (переходное значение потока). Это значение TRANSITION FLOW может быть определено путем вычисления или получено из экспериментов над системой с двумя детандерами. Значение TRANSITION FLOW может зависеть от состава газа и эффективности детандеров, которая может изменяться со временем. Никакого непосредственного измерения потока газа не требуется, поскольку значение TRANSITION FLOW - это значение потока, при котором, когда скорость второго детандера установлена отрицательно смещенной, скорость второго детандера становится равной нижнему пределу SPEED_L нежелательного диапазона скоростей. Если скорость второго детандера будет затем установлена положительно смещенной, даже если поток газа будет поддерживаться при значении TRANSITION FLOW, скорость второго детандера увеличится до верхнего предела SPEED_H нежелательного диапазона скоростей.
[00108] Этот переход от отрицательного смещения скорости второго детандера к положительному смещению скорости второго детандера может изменить распределение падения давления в системе из двух детандеров, что определит изменение текущей скорости первого детандера в сегменте 941 на фиг.9. Когда переход завершен, скорость второго детандера становится больше, чем SPEED_H в сегменте 940 на фиг.9, и поэтому находится вне нежелательного диапазона скоростей. Задержка на шаге S845 позволяет системе завершить переход. Эта задержка может быть равной отношению ширины нежелательного диапазона скоростей для второго детандера, деленной на максимальную допустимую скорость изменения скорости второго детандера: ЗАДЕРЖКА=(SPEED_H-SPEED_L)/SPEED_RATE.
[00109] В некоторых вариантах выполнения настоящего изобретения, если после задержки на шаге S845 скорость второго детандера меньше, чем SPEED_H, хотя поток газа превышает или равен значению TRANSITION FLOW, может быть выдан сигнал тревоги (например, контроллером 160 на фиг.2).
[00110] Поскольку вероятно, что переход от отрицательного смещения скорости второго детандера к положительному смещению скорости второго детандера происходит одновременно с увеличением потока газа, текущая скорость первого детандера во время перемещения показана на фиг.9 штриховой дугой 931, и скорость второго детандера показана на фиг.9 штриховой дугой 930.
[00111] До тех пор, пока, согласно сравнению на шаге S850, текущая скорость второго детандера остается большей, чем SPEED_H (ветвь ДА из блока S850), но, согласно сравнению на шаге S860, меньшей, чем SPEED_HH (ветвь НЕТ из блока S860), скорость второго детандера устанавливают (шаг S855) с положительным смещением, т.е. Ref_B=Exp_A-(Exp_A-SPEED_HH)×GAIN.
[00112] В этой ситуации зависимость скорости второго детандера от потока соответствует сегменту 940 на фиг.9, а текущая скорость первого детандера в этой ситуации соответствует сегменту 941 на фиг.9. Отметим, что при применении положительного смещения к скорости второго детандера (как показано сегментом 940), текущая скорость второго детандера остается большей, чем SPEED_H, и, таким образом, остается вне нежелательного диапазона скоростей (как показано сегментом 441 на фиг.4).
[00113] Когда, согласно сравнению на шаге S860, текущая скорость первого детандера больше, чем SPEED_HH (то есть ветвь ДА из блока S860), скорость второго детандера устанавливают (шаг S865) равной текущей скорости первого детандера.
[00114] Если, согласно сравнению в S850, текущая скорость второго детандера меньше, чем SPEED_H (ветвь НЕТ из блока S850), скорость второго детандера больше не смещают в положительном направлении, а вновь смещают (S870) в отрицательном направлении (Ref_B=Exp_A-(Ехр_А-SPEED_LL)×GAIN). Чтобы избежать перескоков системы вперед и назад между положительным и отрицательным смещениями скорости второго детандера, переход от положительного к отрицательному смещению скорости второго детандера и переход от отрицательного к положительному смещению скорости второго детандера происходит по существу при одном и том же значении TRANSITION FLOW, если зависимости скорости от потока для двух детандеров считать линейными в соответствующих диапазонах скоростей перехода.
[00115] В процессе этого перехода от положительного смещения скорости второго детандера к отрицательному смещению скорости второго детандера может соблюдаться ограничение, заключающееся в том, что скорость изменения скорости должна быть меньше, чем максимальное значение скорости изменения. Новое примененное отрицательное смещение скорости определяет изменение распределения падения давления в системе из двух детандеров. Текущая скорость первого детандера увеличивается. Как только переход от положительного смещения скорости второго детандера к отрицательному смещению скорости второго детандера завершен (с учетом задержки на ограничение, связанное со скоростью изменения скорости), скорость второго детандера оказывается вне нежелательного интервала скоростей. Чтобы система смогла достигнуть этого состояния, имеет место задержка на шаге S875, аналогичная задержке, производимой на шаге S845. Задержки на шагах S845 и S875 на сриг.8 могут быть равными или иметь различные значения. Задержка может быть равной МАХ_ТIМЕ.
[00116] В некоторых вариантах выполнения настоящего изобретения, если после задержки на шаге S845 скорость второго детандера меньше, чем SPEED_H, хотя поток газа меньше или равен значению TRANSITION FLOW, может быть выдан сигнал тревоги (например, контроллером 160 на фиг.2).
[00117] Поскольку вероятно, что переход от положительного смещения скорости второго детандера к отрицательному смещению скорости второго детандера происходит одновременно с уменьшением потока газа, текущая скорость первого детандера во время перемещения показана на фиг.9 штриховой дугой 951, а скорость второго детандера показана на фиг.9 штриховой дугой 950.
[00118] После перехода, если поток газа таков, что скорость второго детандера остается ниже, чем SPEED_L, согласно результатам сравнения на шаге S830 (ветвь НЕТ из блока S830), и текущая скорость первого детандера больше, чем SPEED_LL, согласно результатам сравнения на шаге S810 (ветвь ДА из блока S810), скорость второго детандера устанавливают (шаг S820) с отрицательным смещением и т.д.
[00119] Согласно способу, показанному на фиг.8 и описанному со ссылкой на фиг.9, скорость второго детандера меняется через нежелательный диапазон с такой скоростью, какую позволяет максимальная скорость изменения скорости, когда поток газа проходит через значение TRANSITION FLOW. Поэтому время перехода через диапазон скоростей, которые опасны для второго детандера, уменьшается по сравнению с тем случаем, когда скорости детандеров являются равными и связаны только со скоростью, с которой меняется поток газа.
[00120] Согласно одному из вариантов выполнения настоящего изобретения, как показано на фиг.10, контроллер 1000 (например, контроллер 160 на фиг.2) включает интерфейс 1010 и процессорный блок 1020. Контроллер может быть связан с системой из двух детандеров (например, 100 на фиг.2), в которой первый детандер (например 110 на фиг.2) выдает газ во второй детандер (например 120 на фиг.2), при этом в каждом из первого и второго детандеров имеются лопастные колеса (например 122 и 124 на фиг.2), вращающиеся со скоростями, связанными с потоком газа, проходящим через систему их двух детандеров.
[00121] Интерфейс 1010 принимает информацию о текущей скорости первого детандера и выдает устанавливаемую скорость второго детандера (например, в регулятор 140 на фиг.2). В одном из вариантов выполнения настоящего изобретения интерфейс выполнен с дополнительной возможностью приема информации относительно текущей скорости второго детандера. Однако текущую скорость второго детандера можно считать равной последней установленной скорости второго детандера.
[00122] Процессорный блок 1020 может быть связан с интерфейсом 1010 и может определять устанавливаемую скорость второго детандера на основе процесса, описанного выше со ссылками на фиг.8 и 9. Процессорный блок 1020 может определить устанавливаемую скорость второго детандера так, чтобы она была меньше, чем текущая скорость первого детандера, когда текущая скорость первого детандера находится в пределах диапазона применения смещения (например, между SPEED_LL и SPEED_HH, как показано на фиг.9), и поток текучей среды меньше, чем заранее заданное значение потока (например TRANSIENT FLOW на фиг.9). В этом случае устанавливаемая скорость второго детандера равна разности текущей скорости первого детандера и отрицательного смещения.
[00123] Процессорный блок 1020 может определить устанавливаемую скорость второго детандера так, чтобы она была больше, чем текущая скорость первого детандера, когда поток текучей среды больше, чем заранее заданное значение и текущая скорость первого детандера находится в пределах диапазона применения смещения. Таким образом, в этом случае устанавливаемая скорость второго детандера равна сумме текущей скорости первого детандера и положительного смещения.
[00124] В одном из вариантов выполнения настоящего изобретения процессорный блок 1020 может дополнительно сравнивать скорость второго детандера с первым значением скорости (например SPEED_L на фиг.9), чтобы определить, увеличивается ли поток текучей среды и достигает ли заранее заданного значения потока, когда скорость увеличивается и достигает первого значения скорости. Кроме того, процессорный блок 1020 может сравнивать скорость второго детандера со вторым значением скорости (например SPEED_H на фиг.9), чтобы определить, уменьшается ли поток текучей среды и достигает ли заранее заданного значения потока, когда скорость уменьшается и достигает второго значения скорости. Диапазон скоростей, которые опасны для второго детандера, может лежать между первым значением скорости и вторым значением скорости.
[00125] В еще одном варианте выполнения настоящего изобретения процессорный блок 1020 определяет устанавливаемую скорость второго детандера так, чтобы она была равна текущей скорости первого детандера, когда текущая скорость первого детандера лежит вне диапазона применения смещения.
[00126] В еще одном варианте выполнения настоящего изобретения процессорный блок 1020 генерирует сигнал тревоги, когда скорость второго детандера остается в пределах диапазона скоростей, которые опасны для второго детандера, в течение большего времени, чем заранее заданный временной интервал.
[00127] В еще одном варианте выполнения настоящего изобретения процессорный блок 1020 определяет устанавливаемую скорость второго детандера так, что абсолютное значение разности между устанавливаемой скоростью второго детандера и текущей скоростью первого детандера пропорционально разности между текущей скоростью первого детандера и самым низким значением скорости (например SPEED_LL на фиг.9) в диапазоне применения смещения, когда поток текучей среды меньше, чем заранее заданное значение потока.
[00128] В еще одном варианте выполнения настоящего изобретения процессорный блок 1020 определяет устанавливаемую скорость второго детандера так, что абсолютное значение разности между текущей скоростью первого детандера и устанавливаемой скоростью второго детандера пропорционально разности между самым высоким значением скорости (например SPEED_HH на фиг.9) в диапазоне применения смещения и текущей скоростью первого детандера, когда поток текучей среды больше, чем заранее заданное значение потока.
[00129] В еще одном варианте выполнения настоящего изобретения процессорный блок 1020 определяет устанавливаемую скорость второго детандера так, чтобы абсолютное значение скорости изменения скорости второго детандера было ниже, чем заранее заданная максимальная скорость изменения скорости.
[00130] В еще одном варианте выполнения настоящего изобретения процессорный блок 1020 определяет устанавливаемую скорость второго детандера для множества диапазонов применения смещения и соответствующих заранее заданных значений потока текучей среды.
[00131] Согласно другому варианту выполнения настоящего изобретения, на фиг.11 показана схема электронного устройства 1100, предназначенного для реализации способа, показанного на сриг.8. Это электронное устройство выполнено из электронных блоков с возможностью преобразования сигнала скорости первого детандера, включающего текущую скорость (Ехр_А) первого детандера, и текущей скорости (Ехр_В) второго детандера в сигнал скорости второго детандера, включающий устанавливаемую скорость (Ref_B) второго детандера.
[00132] Электронное устройство 1100 содержит блок 1110 формирования сигнала скорости второго детандера и блок 1120 формирования сигнала переключения смещения. Блок 1110 формирования сигнала скорости второго детандера принимает сигнал скорости (Ехр_А) первого детандера, а блок 1120 формирования сигнала переключения смещения принимает текущую скорость (Ехр_В) второго детандера. Текущая скорость второго детандера может быть измерена датчиком, или ее можно положить равной последней установленной скорости второго детандера.
[00133] Блок 1110 формирования сигнала скорости второго детандера содержит компоненты, установленные вдоль трех трактов, для выполнения различных функций. Компоненты вдоль первого тракта 1130 передают сигнал скорости первого детандера в суммирующую/вычитающую схему 1132. Компоненты вдоль второго тракта 1134 генерируют сигнал, пропорциональный разности между текущей скоростью первого детандера и нижним пределом (SPEED_LL) диапазона применения смещения. Компоненты вдоль третьего тракта 1135 генерируют сигнал, пропорциональный разности между верхним пределом (SPEED_HH) диапазона применения смещения и текущей скоростью первого детандера.
[00134] Второй тракт 1134 и третий тракт 1135 содержат соответствующие схемы 1136 и 1137 фиксации уровня. Благодаря схемам 1136 и 1137 фиксации уровня, сигналы на выходах второго тракта 1134 и третьего тракта 1135 соответственно имеют значение 0,0, если текущая скорость (Ехр_А) первого детандера находится вне диапазона применения смещения (то есть больше, чем SPEED_HH, и меньше, чем SPEED_LL). Кроме того, благодаря схемам 1136 и 1137 фиксации уровня, сигналы с выходов второго тракта 1134 и третьего тракта 1135 не превышает по абсолютной величине максимально допустимую разность (SPEED_DIFF) скоростей. Таким образом, отрицательное смещение на выходе второго тракта 1134 представляет собой положительную величину, пропорциональную разности между текущей скоростью первого детандера и нижним пределом (SPEED_LL) диапазона применения смещения, если эта разность больше, чем 0 (иначе на выходе имеем 0). Отрицательное смещение также ограничено так, что его абсолютная величина меньше, чем максимальная допустимая разность (SPEED_DIFF) скоростей.
[00135] Отрицательное смещение на выходе третьего тракта 1135 представляет собой отрицательную величину, пропорциональную разности между текущей скоростью первого детандера и верхним пределом (SPEED_HH) диапазона применения смещения, если эта разность меньше, чем 0 (иначе на выходе имеем 0), а абсолютное значение разности меньше, чем максимальная допустимая разность (SPEED_DIFF) скоростей.
[00136] Блок 1110 формирования сигнала скорости второго детандера дополнительно содержит переключатель 1138, который передает сигнал смещения, представляющий собой один из сигналов, принятых из первого тракта 1134 или из второго тракта 1135, в зависимости от сигнала переключения смещения, принятого из блока 1120 формирования сигнала переключения смещения. Затем сигнал смещения с выхода переключателя 1138 умножается на параметр GAIN в компоненте 1140 усиления. Умноженный сигнал смещения с выхода компонента 1140 усиления затем поступает в фильтрующий компонент 1142, который ограничивает вычисленный сигнал смещения так, чтобы текущая скорость изменения скорости второго детандера не превышала максимальную скорость изменения устанавливаемой скорости второго детандера. Результирующий сигнал смещения с выхода фильтра 1142 вычитается из сигнала скорости первого детандера в суммирующей/вычитающей схеме 1132, а затем по линии 1133 поступает во второй детандер 120 в виде сигнала Ref_B.
[00137] Блок 1120 формирования сигнала смещения содержит два тракта 1150 и 1152, которые соединены с входом триггерной схемы 1154. Из тракта 1150 в триггерную схему 1154 поступает "1", или высокий сигнал, если текущая скорость второго детандера больше, чем нижний предел (SPEED_L) нежелательного диапазона скоростей, которые опасны для второго детандера. Из тракта 1152 в триггерную схему 1154 поступает "1", или высокий сигнал, если текущая скорость второго детандера меньше, чем верхний предел (SPEED_H) нежелательного диапазона скоростей, которые опасны для второго детандера. Когда как из тракта 1150, так и из тракта 1152 поступает "1", или высокий сигнал, текущая скорость второго детандера находится в нежелательном диапазоне во время перехода между состояниями с положительным и отрицательным смещениями. Поэтому никакого изменения сигнала переключения смещения на выходе триггерной схемы 1154 не происходит.Сигнал переключения смещения с выхода триггерной схемы 1154 по шине 1155 поступает в переключатель 1138. На основе принятого сигнала переключения смещения переключатель 1138 соединяет второй тракт 1134 с суммирующей/вычитающей схемой 1132, если сигнал переключения смещения свидетельствует, что текущая скорость второго детандера ниже, чем нижний предел (SPEED_L) нежелательного диапазона скоростей, и соединяет третий тракт 1135 с суммирующей схемой 1132, если сигнал переключения смещения свидетельствует, что текущая скорость второго детандера ниже, чем верхний предел (SPEED_H) нежелательного диапазона скоростей. Два блока 1157 и 1159 «И», расположенные перед триггером 1154, обеспечивают переключение смещения в правильном направлении и предупреждают фликкер-эффект в блоке 1120 формирования сигнала смещения. Таким образом, нет необходимости знать действительное значение потока.
[00138] Кроме того, блок 1120 формирования сигнала переключения смещения содержит блок 1160 аварийной сигнализации, который выдает сигнал тревоги, когда текущая скорость второго детандера принимает значение, находящееся в нежелательном диапазоне в течение времени, превышающего заранее заданный временной интервал. Схемы 1156 и 1158 задержки обеспечивают выполнение шагов S845 и S875, соответственно, показанных на фиг.8.
[00139] Электронное устройство 1100 реализует способ, показанный на фиг.8. Когда текущая скорость (Ехр_А) первого детандера находится вне диапазона применения смещения (то есть она меньше, чем SPEED_LL, или больше, чем SPEED_HH), благодаря схемам 1136 и 1137 фиксации уровня, к первому сигналу скорости детандера в суммирующей/вычитающей схеме 1132 прибавляется 0. Когда текущая скорость (Ехр_А) первого детандера находится в диапазоне применения смещения (то есть она больше, чем SPEED_LL, и меньше, чем SPEED_HH), к первому сигналу скорости первого детандера в суммирующей/вычитающей схеме 1132 прибавляется сигнал положительного смещения или сигнал отрицательного смещения.
[00140] Какой именно сигнал - сигнал положительного смещения или сигнал отрицательного смещения - прибавляется к сигналу скорости первого детандера в суммирующей/вычитающей схеме 1132, зависит от сигнала переключения смещения, принятого из блока 1120 формирования сигнала переключения смещения, описанного выше. Сигнал скорости второго детандера - это сигнал на выходе суммирующей схемы 1132.
[00141] На фиг.12 показана последовательность операций для способа автоматической установки скорости второго детандера, который принимает поток текучей среды с выхода первого детандера, для уменьшения времени работы второго детандера на скоростях в нежелательном диапазоне скоростей второго детандера, согласно одному из вариантов выполнения настоящего изобретения.
[00142] Способ 1200 включает такую установку (шаг S1210) скорости второго детандера, чтобы эта скорость была меньше, чем текущая скорость первого детандера, когда текущая скорость первого детандера находится в пределах диапазона применения смещения и текущая скорость второго детандера увеличивается и является меньшей, чем первое значение скорости, или уменьшается и является меньшей, чем второе значение скорости.
[00143] Способ 1200 дополнительно включает такую установку (шаг S1220) скорости второго детандера, чтобы она была больше, чем текущая скорость первого детандера, когда текущая скорость первого детандера находится в пределах диапазона применения смещения и текущая скорость второго детандера увеличивается и является большей, чем первое значение скорости, или уменьшается и является большей, чем второе значение скорости.
[00144] Раскрытые в качестве примера варианты выполнения настоящего изобретения представляют способ, контроллер и устройство, уменьшающие время перехода через диапазон скоростей, опасных для первого детандера, путем автоматического смещения скорости второго детандера, который принимает поток текучей среды с выхода первого детандера. Следует отметить, что настоящее описание не имеет целью ограничить объем изобретения. Напротив, данные в качестве примера варианты выполнения настоящего изобретения предназначены для охвата вариантов, модификаций и эквивалентов, которые соответствуют сути и объему изобретения, определенного формулой изобретения. Кроме того, в подробном описании примеров выполнения изобретения сформулированы многочисленные специфические детали, способствующие всестороннему пониманию настоящего изобретения. Однако специалистам очевидно, что различные варианты выполнения настоящего изобретения могут быть осуществлены и без таких специфических деталей.
[00145] Вышеописанные способы могут быть осуществлены в технических средствах, программном обеспечении, встроенных программах или их комбинации.
[00146] Хотя признаки и элементы примеров выполнения настоящего изобретения описаны в конкретных комбинациях, каждый признак или элемент может использоваться по отдельности без других признаков и элементов или в различных комбинациях совместно с другими или без других признаков и элементов, раскрытых в настоящем изобретении.
[00147] В настоящем описании использованы примеры осуществления изобретения, позволяющие любому специалисту в данной области техники практически использовать изобретение, включая создание и использование любых устройств или систем и реализацию любых способов, входящих в объем изобретения. Объем изобретения определен формулой изобретения и может включать другие примеры, которые очевидны специалистам в данной области техники. Предполагается, что такие другие примеры находятся в объеме формулы изобретения.
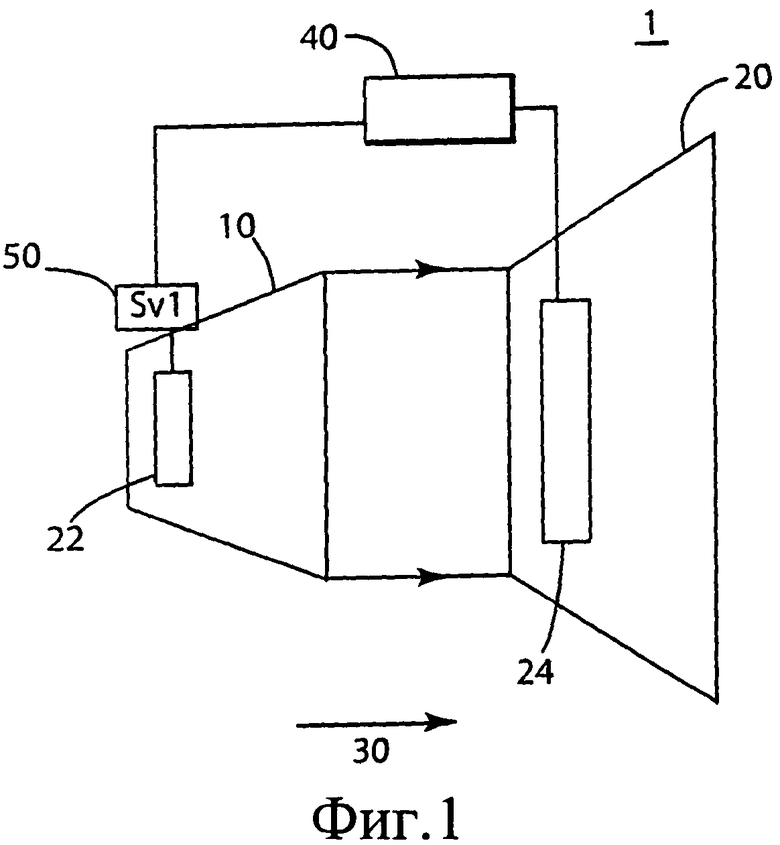
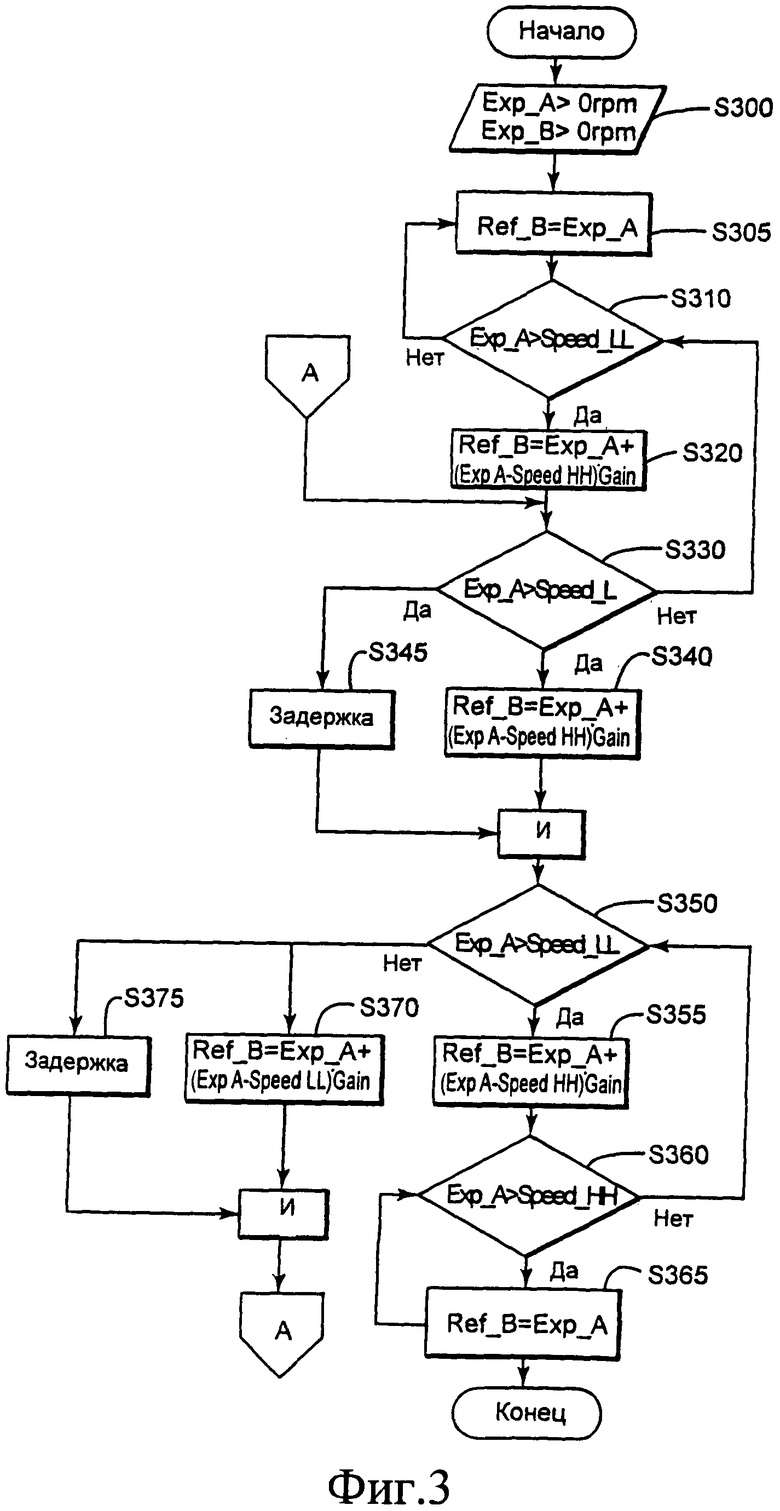
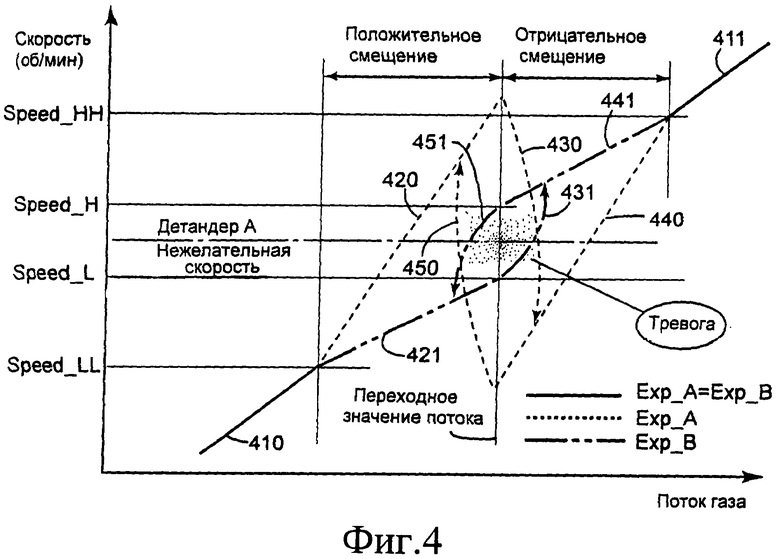
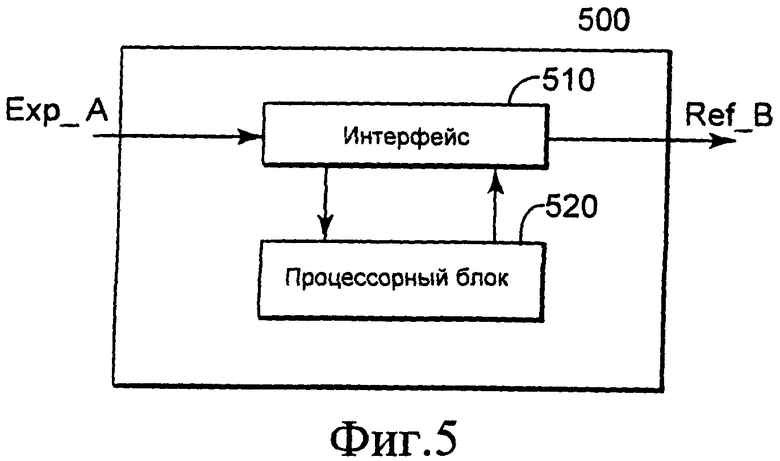
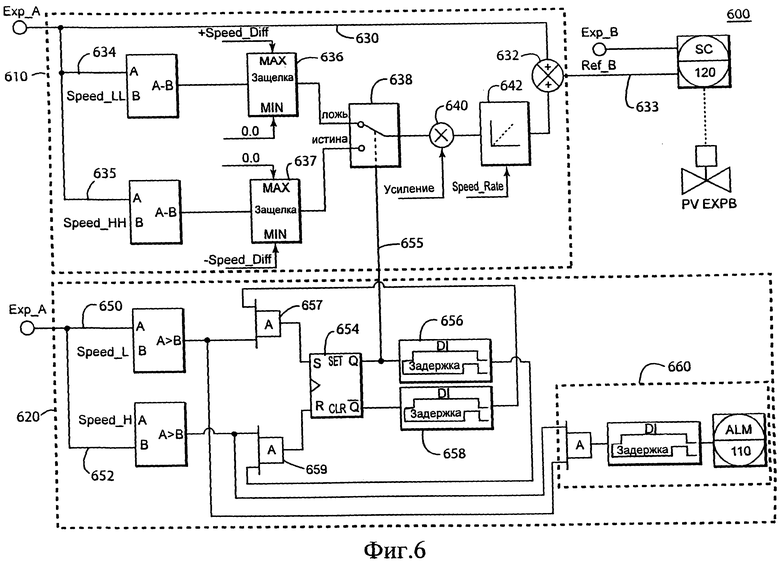
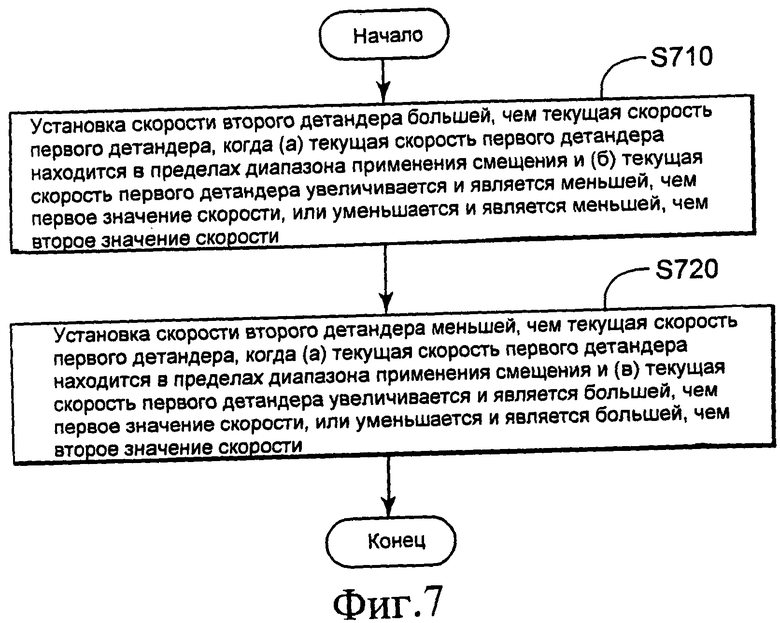
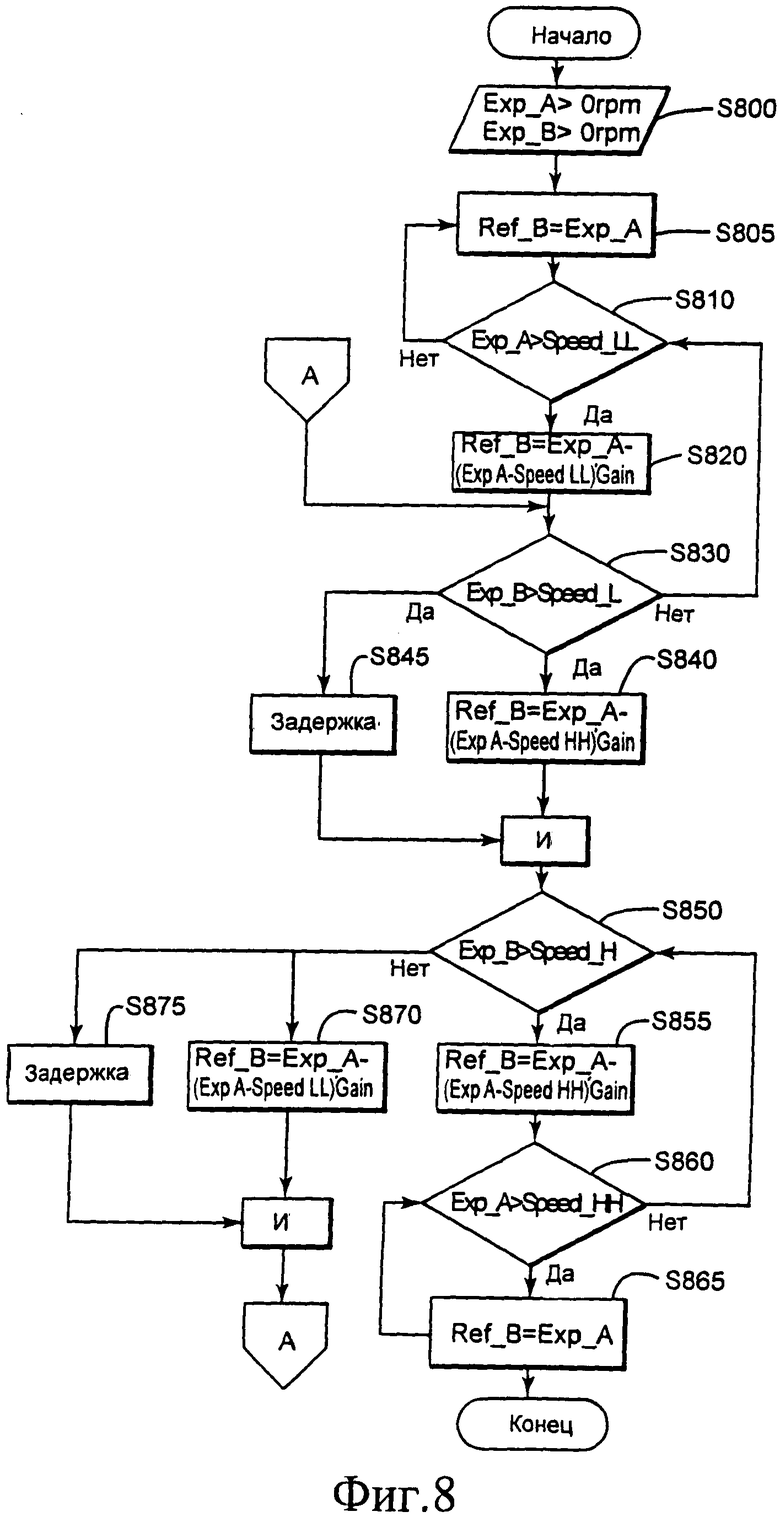
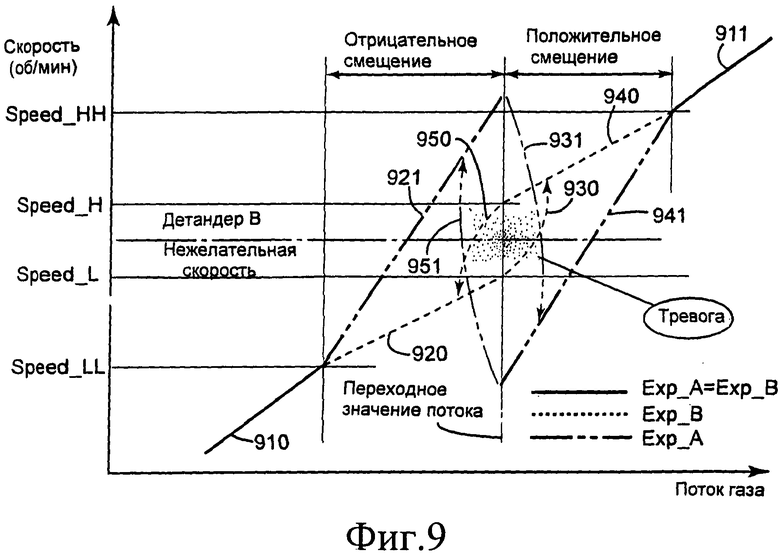
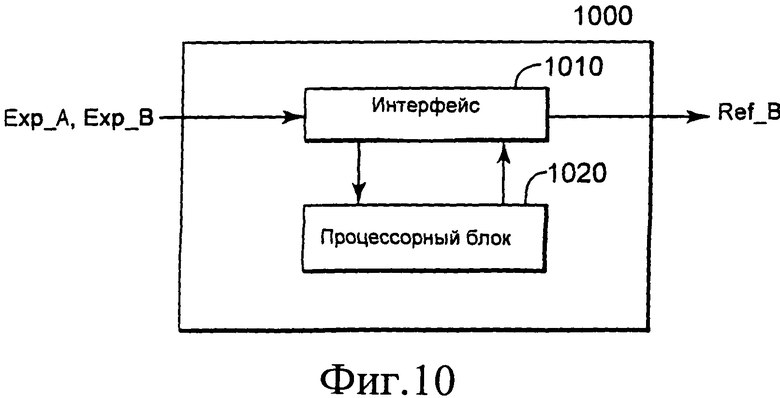
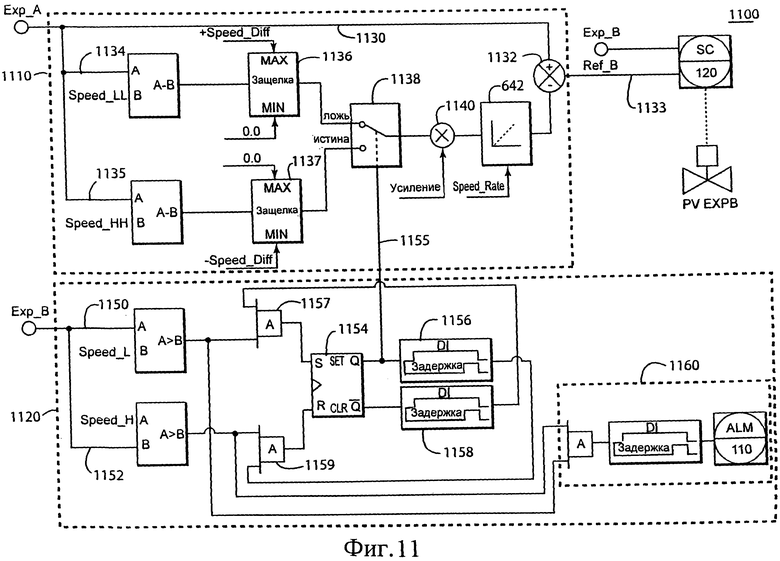
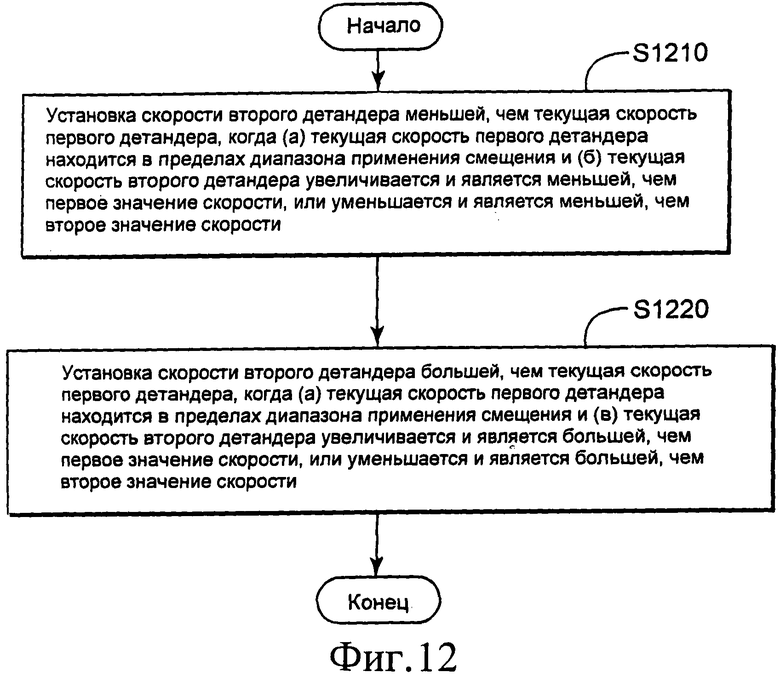
Способ управления временем перехода через диапазон скоростей, опасных для второго детандера (120), который принимает поток текучей среды от первого детандера (110), осуществляется путем автоматического смещения скорости второго детандера (120), когда текущая скорость первого детандера находится в пределах диапазона применения смещения. Способ включает установку скорости второго детандера меньшей, чем текущая скорость первого детандера, когда текущая скорость второго детандера увеличивается и является меньшей, чем первое значение скорости, или уменьшается и является меньшей, чем второе значение скорости. Способ также включает установку скорости второго детандера большей, чем текущая скорость первого детандера, когда текущая скорость второго детандера увеличивается и является большей, чем первое значение скорости, или уменьшается и является большей, чем второе значение скорости. Изобретение направлено на создание способа и устройств для автоматической установки скорости детандера, который принимает поток текучей среды с выхода другого детандера. 4 н. и 11 з.п. ф-лы, 12 ил.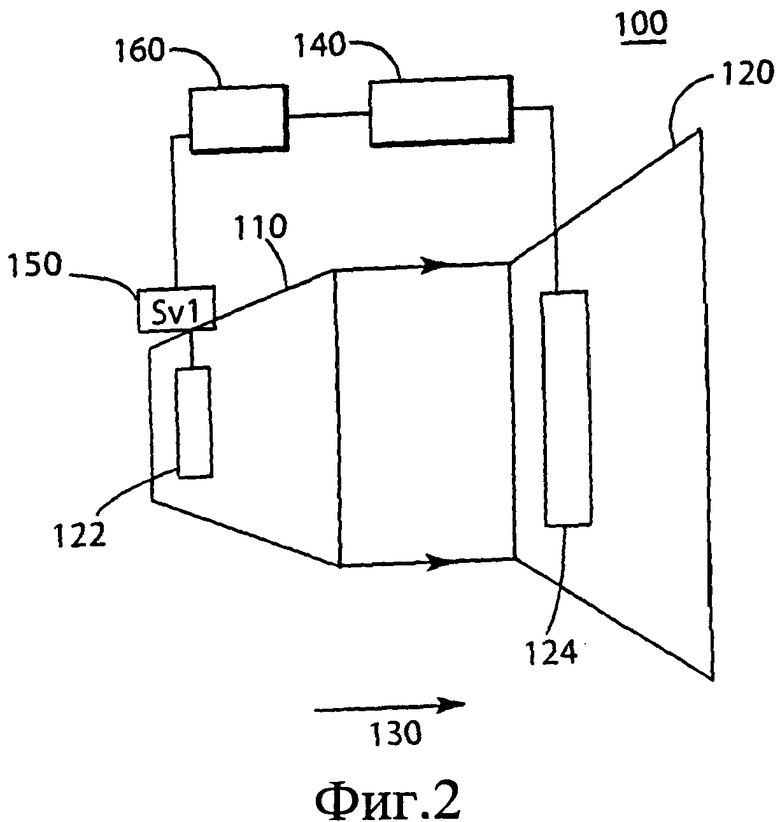
1. Способ (1200) управления временем перехода через диапазон скоростей, опасных для второго детандера (120), который принимает поток текучей среды от первого детандера (110), путем автоматического смещения скорости второго детандера (120), включающий:
установку (S1210) скорости второго детандера меньшей, чем текущая скорость первого детандера, когда (а) текущая скорость первого детандера находится в пределах диапазона применения смещения, и (б) текущая скорость второго детандера увеличивается и является меньшей, чем первое значение скорости, или уменьшается и является меньшей, чем второе значение скорости, и
установку (S1220) скорости второго детандера большей, чем текущая скорость первого детандера, когда (а) текущая скорость первого детандера находится в пределах диапазона применения смещения и (в) текущая скорость второго детандера увеличивается и является большей, чем первое значение скорости, или уменьшается и является большей, чем второе значение скорости.
2. Способ по п.1, в котором диапазон скоростей, опасных для второго детандера, лежит между упомянутыми первым значением скорости и вторым значением скорости.
3. Способ по п.1, включающий:
установку скорости второго детандера, равной текущей скорости первого детандера, когда текущая скорость первого детандера находится вне диапазона применения смещения.
4. Способ по п.1, дополнительно включающий:
посылку сигнала тревоги, когда текущая скорость второго детандера находится в диапазоне скоростей, опасных для второго детандера, в течение более длительного времени, чем заранее заданный временной интервал.
5. Способ по п.1, в котором отрицательное смещение, которое представляет собой разность между текущей скоростью первого детандера и скоростью, устанавливаемой для второго детандера, пропорционально разности между (i) текущей скоростью первого детандера и (ii) самым низким значением скорости в диапазоне применения смещения, когда скорость второго детандера установлена большей, чем текущая скорость первого детандера.
6. Способ по п.1, в котором положительное смещение, которое представляет собой разность между текущей скоростью первого детандера и скоростью, устанавливаемой для второго детандера, пропорционально разности между (i) самым высоким значением скорости в диапазоне применения смещения и (ii) текущей скоростью первого детандера, когда скорость второго детандера установлена меньшей, чем текущая скорость первого детандера.
7. Способ по п.1, в котором скорость изменения скорости, устанавливаемой для второго детандера, поддерживают ниже заранее заданного максимального значения скорости изменения скорости.
8. Способ по п.1, в котором скорость второго детандера автоматически устанавливают отличной от текущей скорости первого детандера для множества диапазонов применения смещения и соответствующих пар из первого значения скорости и второго значения скорости.
9. Контроллер (1000), содержащий:
интерфейс (1010), предназначенный для приема информации о текущей скорости первого детандера (110) и вывода устанавливаемой скорости для второго детандера (120), который принимает поток текучей среды с выхода первого детандера, и
процессорный блок (1020), связанный с интерфейсом и предназначенный для определения устанавливаемой скорости второго детандера так, что она меньше, чем текущая скорость первого детандера, когда (а) текущая скорость первого детандера находится в пределах диапазона применения смещения и (б) текущая скорость второго детандера увеличивается и является меньшей, чем первое значение скорости, или уменьшается и является меньшей, чем второе значение скорости, и она больше, чем текущая скорость первого детандера, когда (а) текущая скорость первого детандера находится в пределах диапазона применения смещения и (в) текущая скорость второго детандера увеличивается и является большей, чем первое значение скорости, или уменьшается и является большей, чем второе значение скорости.
10. Контроллер по п.9, в котором диапазон скоростей, опасных для второго детандера, лежит между первым значением скорости и вторым значением скорости, а процессорный блок принимает текущую скорость второго детандера через интерфейс или текущая скорость второго детандера представляет собой последнюю устанавливаемую скорость второго детандера.
11. Контроллер по п.9, в котором процессорный блок определяет устанавливаемую скорость второго детандера так, чтобы она была равна текущей скорости первого детандера, когда текущая скорость первого детандера находится вне диапазона применения смещения.
12. Контроллер по п.9, в котором процессорный блок дополнительно генерирует сигнал тревоги, когда текущая скорость второго детандера остается в пределах диапазона скоростей, опасных для второго детандера, в течение большего времени, чем заранее заданный временной интервал.
13. Контроллер по п.9, в котором процессорный блок определяет устанавливаемую скорость второго детандера так, чтобы разность между текущей скоростью первого детандера и устанавливаемой скоростью была пропорциональна разности между текущей скоростью и самой низкой скоростью в диапазоне применения смещения, когда устанавливаемая скорость второго детандера меньше, чем текущая скорость первого детандера.
14. Устройство (1100) из электронных компонентов для преобразования сигнала скорости первого детандера, включающего текущую скорость первого детандера (110), в сигнал скорости второго детандера, включающий устанавливаемую скорость второго детандера (120), который принимает поток текучей среды из первого детандера, содержащее:
блок (1110) формирования сигнала скорости второго детандера, содержащий:
суммирующую/вычитающую схему (632) для вычитания сигнала смещения из сигнала скорости первого детандера,
первый тракт (1130) для передачи сигнала скорости первого детандера в суммирующую/вычитающую схему,
второй тракт (1134) для формирования сигнала отрицательного смещения,
третий тракт (1135) для формирования сигнала положительного смещения и
переключатель (1138), связанный с выходами второго тракта и третьего тракта для соединения второго тракта или третьего тракта с суммирующей/вычитающей схемой, в зависимости от сигнала переключения смещения, и
блок (1120) формирования сигнала переключения смещения, связанный с блоком (1110) формирования сигнала скорости второго детандера и предназначенный для формирования сигнала переключения смещения, предписывающего соединить с суммирующей/вычитающей схемой второй тракт (1134), если текущая скорость второго детандера меньше, чем первое значение, соединить с суммирующей/вычитающей схемой третий тракт (1135), если текущая скорость второго детандера (120) больше, чем второе значение, и сохранить текущее соединение, если текущая скорость второго детандера (120) больше, чем первое значение и меньше, чем второе значение,
при этом второй тракт (1134) и третий тракт (1135) формируют нулевой сигнал, когда текущая скорость первого детандера находится вне диапазона применения смещения.
15. Считываемый компьютером носитель, хранящий исполняемые коды, которые при их выполнении процессором заставляют компьютер реализовать способ (1200) управления временем перехода через диапазон скоростей, опасных для второго детандера (120), путем автоматического смещения скорости второго детандера (120), который принимает поток текучей среды с выхода первого детандера (110), при этом указанный способ включает:
установку (S1210) скорости второго детандера меньшей, чем текущая скорость первого детандера, когда (а) текущая скорость первого детандера находится в пределах диапазона применения смещения и (б) текущая скорость второго детандера увеличивается и является меньшей, чем первое значение скорости, или уменьшается и является меньшей, чем второе значение скорости, и
установку (S1220) скорости второго детандера большей, чем текущая скорость первого детандера, когда (а) текущая скорость первого детандера находится в пределах диапазона применения смещения и (в) текущая скорость второго детандера увеличивается и является большей, чем первое значение скорости, или уменьшается и является большей, чем второе значение скорости.
| US 4173870 A, 13.11.1979 | |||
| Система автоматического управления криогенной гелиевой установкой | 1985 |
|
SU1307178A1 |
| САЛЬНИКОВОЕ УПЛОТНЕНИЕ | 0 |
|
SU352064A1 |

