Область техники, к которой относится изобретение
Настоящее изобретение в целом касается клапанов, в частности способов, устройств и готовых изделий, предназначенных для калибровки приборов, установленных на клапанах.
Уровень техники
С элементами технологической линии, например, с клапанами, в типичном случае связаны установленные на них приборы, например контроллер положения клапана и/или передатчик положения, которые управляют этими элементами и/или передают информацию об этом элементе для выполнения требуемого процесса (процессов) и/или операции (операций) в составе технологической линии. Пример клапанного устройства включает пневматический привод мембранного типа или поршневого типа, управляемый электропневматическим контроллером положения клапана. Такие электропневматические контроллеры положения клапана, например, получают один или несколько управляющих сигналов (например, управляющий сигнал 4-20 миллиампер (мА), управляющий сигнал 0-10 вольт (В) постоянного напряжения, цифровой управляющий сигнал и т.п.) и преобразуют этот управляющий сигнал (сигналы) в одно или несколько значений давления сжатого воздуха, подаваемых на пневматический привод для того, чтобы открыть, закрыть или удерживать в некотором положении соответствующий клапан. Например, если программа управления процессом определит, что нормально закрытый клапан с пневматическим приводом рабочего хода должен пропускать больший объем рабочей текучей среды (и/или с большей интенсивностью потока), то величина управляющего сигнала, подаваемого на электропневматический контроллер положения клапана, связанный с данным клапаном, может увеличиться с 4 мА до 8 мА, при условии, что в качестве управляющего сигнала применяется токовый сигнал.
В некоторых примерах электропневматический контроллер положения клапана использует сигнал обратной связи, генерируемый чувствительной системой или элементом обратной связи, например датчиком положения. Такие сигналы обратной связи дают информацию о положении пневматического привода и соответствующего ему клапана. Контроллер положения клапана сравнивает этот сигнал обратной связи с управляющим сигналом, представляющим требуемое заданное значение или требуемое положение клапана (например, открытое на 35%) и определяет, нужно ли откорректировать одно или несколько давлений сжатого воздуха, подаваемых на привод. Для того чтобы контроллер положения клапана, привод и клапанное устройство работали так, как намечено в данном технологическом процессе, может понадобиться откалибровать контроллер положения клапана по чувствительному элементу обратной связи.
Раскрытие изобретения
Представлены варианты способов, устройств и готовых изделий, предназначенных для калибровки таких приборов, установленных на клапанах, как контроллер положения и/или датчик положения. Описанный вариант устройства для калибровки клапанного узла, включающего клапан, привод и передатчик положения, содержит интерфейс для приема значения о положении клапана и для приема значения чувствительности датчика положения, а также устройство расчета крайних точек, предназначенное вычислять первое расчетное значение (соответствующее ожидаемому полностью открытому положению клапана) исходя из сигнала положения, первого и второго значений, а также вычислять второе расчетное значение (соответствующее полностью закрытому положению клапана) исходя из сигнала положения, первого и второго полученных значений, при этом указанные первое и второе расчетные значения вычисляются без изменения положения клапана в период между вычислениями этих первого и второго расчетных значений.
Представленный способ калибровки контроллера положения клапана включает прием сигнала положения, дающего информацию о положении клапана, прием первого значения, дающего информацию о текущем положении клапана, прием второго значения, дающего информацию о чувствительности датчика положения, вычисление (на основе полученного сигнала положения, первого и второго полученных значений) первого расчетного значения сигнала положения, соответствующего полностью открытому положению клапана,, вычисление (на основе полученного сигнала положения, первого и второго полученных значений) второго расчетного значения сигнала положения, соответствующего полностью закрытому положению клапана (при этом указанные первое и второе расчетные значения вычисляются при фиксированном текущем положении клапана), а также управление приводом клапана в соответствии с управляющим сигналом (представляющим требуемое положение клапана) для установки клапана практически в требуемое положение исходя из сигнала положения, а также первого и второго расчетных значений.
В описанном варианте готового промышленного изделия хранятся машиночитаемые инструкции, выполнение которых заставляют машину принимать сигнал положения, дающий информацию о положениях клапана, принимать первое значение, дающее информацию о расчетном текущем положении клапана, принимать второе значение, представляющее чувствительность датчика положения, вычислять (на основе полученного сигнала положения, первого и второго полученных значений) первое расчетное значение сигнала положения, соответствующее полностью открытому клапану, вычислять (на основе полученного сигнала положения, первого и второго полученных значений) второе расчетное значение сигнала положения, соответствующее полностью закрытому положению клапана, при этом во время вычисления первого и второго расчетных значений текущее положение клапана является фиксированным, вычислять (исходя из сигнала положения, первого и второго расчетных значений) третье значение, соответствующее действительному положению клапана, а также передавать это третье значение, по меньшей мере, либо на устройство управления процессом, либо на станцию контроля, либо на устройство контроля, либо на систему автоматического отключения, либо на систему блокировки процесса.
Представленное устройство для калибровки узла, содержащего перемещаемый элемент, контроллер положения и датчик положения, содержит интерфейс для приема сигнала положения, дающего информацию о положениях перемещаемого элемента, для приема первого значения, дающего информацию о текущем положении перемещаемого элемента, а также для приема второго значения, представляющего чувствительность датчика положения, а также содержит устройство расчета крайних точек, предназначенное вычислять, на основе сигнала положения, первого и второго значений, - первое расчетное значение сигнала положения, соответствующее полностью открытому положению перемещаемого элемента, а также вычислять, на основе сигнала положения, первого и второго значений, - второе расчетное значение сигнала положения, соответствующее полностью закрытому положению клапана, при этом указанные первое и второе расчетные значения вычисляются без изменения положения этого перемещаемого элемента.
Краткое описание чертежей
На Фиг.1 представлен вариант клапанного устройства, содержащего контроллер положения клапана, который можно калибровать с помощью описанных здесь вариантов способов и устройств.
На Фиг.2А-2С представлены примеры состояний представленного на Фиг.1 варианта клапанного узла.
Фиг.3, 4 и 5 иллюстрируют варианты операций калибровки, которые можно выполнить представленным на Фиг.1 контроллером положения клапана.
Фиг.6 иллюстрирует пример способа воплощения представленного на Фиг.1 варианта контроллера положения клапана.
Фиг.7 иллюстрирует пример процесса, который может быть выполнен для установки контроллеров положения клапана, представленных на Фиг.1 и Фиг.6.
Фиг.8-11 иллюстрируют пример процессов, которые могут быть выполнены для калибровки и/или воплощения варианта контроллера положения клапана, представленного на Фиг.1 и Фиг.6.
Фиг.12 иллюстрирует вариант клапанного устройства, содержащего передатчик положения, который можно калибровать с помощью представленных здесь способов и устройств.
Фиг.13 иллюстрирует пример способа воплощения представленного на Фиг.12 варианта передатчика положения.
Фиг.14 иллюстрирует пример процесса, который может быть выполнен для установки представленного на Фиг.12 и Фиг.13 варианта передатчика положения.
Фиг.15 иллюстрирует пример процессов, которые могут быть выполнены для калибровки и/или воплощения представленного на Фиг.12 и Фиг.13 варианта передатчика положения.
На Фиг.16 представлено схематическое изображение варианта процессорной платформы, которую можно применять и/или программировать для воплощения вариантов процессов, представленных на Фиг.7-11, Фиг.14 и Фиг.15, и/или в более общем смысле, для воплощения варианта контроллера положения клапана, представленного на Фиг.1 и Фиг.6 и/или варианта передатчика положения, представленного на Фиг.12 и Фиг.13.
Осуществление изобретения
Для того чтобы откалибровать некоторые клапаны, необходимо выполнить полный рабочий ход, переведя такой клапан из одной крайней точки перемещения или одного крайнего положения (например, полностью открытого положения) в другую крайнюю точку перемещения или крайнее положение (например, полностью закрытое положение). Такие способы неудобны, поскольку для выполнения полного рабочего хода требуется отключить клапан от процесса или извлечь из линии. Однако, в некоторых случаях технологический процесс нельзя прерывать или отключать для осуществления калибровки контроллера положения клапана и/или передатчика положения. И даже если технологический процесс можно прервать, то такие прерывания могут привести к нежелательным потерям средств и/или эффективности. Можно использовать обводную линию для того, чтобы изолировать клапан и не нарушать работу системы процесса, однако, такие обводные линии не всегда желательны, не всегда имеются в наличии или осуществимы.
В качестве дополнения или альтернативы некоторые контроллеры положения клапана и/или датчики положения можно калибровать с помощью стендовых, тестовых или калибровочных клапана, привода или датчика положения, имеющих характеристики, практически подобные или идентичные (например, по длинне полного рабочего хода, крайним точкам перемещения и т.п.) характеристикам клапана, привода и датчика положения, для которых будет устанавливаться данный контроллер положения клапана и/или передатчик положения. Эти тестовые клапан, привод и датчик положения могут располагаться, например, в мастерской или в лаборатории, находящихся вдали от данной технологической линии. В такой лаборатории или мастерской тестовые клапан, привод и датчик положения можно подвергнуть полному рабочему ходу для того, чтобы откалибровать новый и/или устанавливаемый на замену контроллер положения клапана и/или передатчик положения. После калибровки откалиброванный контроллер положения клапана и/или передатчик положения извлекают из системы тестирования и оперативно подключают или монтируют к нужному приводу клапана в технологической линии. Такой способ является эффективным, однако он требует значительных затрат времени и наличия соответствующих тестовых приспособлений.
Для устранения, по меньшей мере, указанных недостатков представленные здесь контроллеры положения клапана и датчики положения могут сами себя калибровать, используя подаваемое извне значение положения, представляющее собой оценку текущего положения (например, закрытое на 70%) клапанного узла (т.е. рассматриваемых в совокупности клапана, привода и датчика положения), на который устанавливается, был установлен и/или будет установлен данный контроллер положения клапана. В описанных здесь примерах никаких дополнительных значений положения не потребуется для контроллера положения клапана или передатчика положения прежде, чем данный контроллер положения клапана или передатчик положения будет введен в действие в данной технологической линии. Указанное единственное значение положения может легко и/или просто определить и/или рассчитать наладчик, выполняющий установку, например, визуально определяя и/или измеряя текущее положение клапанного узла во время установки контроллера положения клапана. Наладчик вводит измеренное или рассчитанное значение текущего положения в контроллер положения клапана или в передатчик положения, используя, например, пользовательский интерфейс. Исходя из введенного (измеренного или рассчитанного) значения текущего положения клапана, представленные здесь контроллеры положения клапана и датчики положения обучаются, адаптируются и/или калибруют сами себя в ходе последующей работы клапанного узла в составе работающей технологической линии. Соответственно, способы и устройства, предназначенные для калибровки описанных здесь контроллеров и датчиков положения, можно применять, не прибегая к отключению или извлечению связанного с ними участка технологической линии, без необходимости выполнить полный рабочий ход клапана, регулировку или перевод его в другое положение, без необходимости иметь обводную линию и без необходимости иметь стендовый, тестовый или калибровочный клапанный узел.
Фиг.1 иллюстрирует представленное клапанное устройство 100, включающее клапанный узел 102 и контроллер 104 положения клапана, изготовленный согласно данному описанию. Отмечая, что представленные способы и устройства для калибровки контроллеров положения клапанов описаны по отношению к представленному на Фиг.1 клапанному узлу 102, следует понимать, что представленные здесь способы и устройства можно применять для калибровки контроллеров положения клапана, применяемых с любым количеством и/или типом (типами) дополнительных или альтернативных вариантов клапанных узлов. Например, хотя показанный на Фиг.1 клапан 106 является клапаном со скользящим штоком, однако, представленные способы и устройства для калибровки контроллеров положения клапана можно применять с клапанами любого другого типа (типов), включая (но, не ограничиваясь) поворотные регулирующие клапаны, четвертьоборотные регулирующие клапаны и т.п. Следует отметить, что хотя представленный привод 108 на Фиг.1 показан в виде поршневого привода двустороннего действия, однако, в качестве дополнения или альтернативы можно использовать привод любого другого типа (типов), например, поворотный привод, мембранный или поршневой привод одностороннего действия с пружинным возвратом. Кроме того, следует понимать, что описанные здесь способы и устройства калибровки, на основе одного значения положения могут применяться с любым количеством и/или типом (типами) других управляемых устройств, например (но не ограничиваясь), с задвижками, лифтами, подъемными устройствами, весами и т.п. Соответственно, пример на Фиг.1 является просто иллюстративным для объяснения изобретения и не ограничивает объем настоящего изобретения.
Представленный на Фиг.1 клапанный узел 102 содержит клапан 106, пневматический привод 108 и датчик положения 110. Представленный на Фиг.1 клапан 106 содержит клапанное седло 112, расположенное в клапане и образующее отверстие 114, представляющее собой проточный канал для текучей среды в клапане 106 между отверстиями 116 и 118. Представленный на Фиг.1 привод 108 оперативно связан с элементом управления потоком 120 через шток 122 клапана, который может перемещать орган управления потоком 120 в первом направлении (например, отдаляя от клапанного седла 112), позволяя большему количеству текучей среды проходить между отверстиями 116 и 118, и может перемещать орган управления потоком 120 во втором направлении (например, по направлению к клапанному седлу 112), ограничивая или прекращая прохождение текучей среды между отверстиями 116 и 118.
Представленный на Фиг.1 пневматический привод 108 содержит поршень 130, расположенный в корпусе 132, образуя первую камеру 136 и вторую камеру 137. Шток привода 138 соединен с поршнем 130 и оперативно связан со штоком 122 клапана через соединитель 139, связанный с индикатором перемещения 140. Интенсивностью потока текучей среды через клапан 106 управляют путем регулировки положения поршня 130 по отношению к корпусу 132 с целью регулировки положения элемента управления потоком 120 по отношению к клапанному седлу 112, а следовательно, и положения клапана 106.
Для управления положением представленного поршня 130 показанный на Фиг.1 электропневматический контроллер 104 положения клапана подает управляющую текучую среду (например, сжатый воздух, гидравлическую текучую среду и т.п.) из источника текучей среды 150 к первой камере 136 через первый проточный канал 152, а также ко второй камере 137 через второй проточный канал 154. Перепад давления (если он имеется) на представленном поршне 130 определяет, должен ли поршень 130 оставаться неподвижным или перемещаться. Например, для перемещения поршня 130 в первом направлении (например, вниз в ориентации по Фиг.1) контроллер 104 положения клапана подает управляющую текучую среду в первую камеру 136 под давлением, превышающим давление управляющей текучей среды, подаваемой во вторую камеру 137, тем самым создавая результирующее усилие на поршень 130, направленное вниз. Перемещение поршня 130 в этом первом направлении вниз вынуждает шток 138 привода, клапанный шток 122, а следовательно, и орган управления потоком 120 перемещаться к клапанному седлу 112, тем самым сильнее ограничивая или прекращая прохождение текучей среды через отверстие 114. И наоборот, для перемещения поршня 130 во втором направлении (например, вверх в ориентации по Фиг.1) контроллер 104 положения клапана подает управляющую текучую среду в первую камеру 136 под более низким давлением, чем давление управляющей текучей среды, подаваемой во вторую камеру 137, тем самым создавая результирующее усилие на поршень 130, направленное вверх. Перемещение поршня 130 в этом втором направлении вверх вынуждает шток 138 привода, клапанный шток 122, а следовательно, и орган управления потоком 120 перемещаться от клапанного седла 112, тем самым позволяя более интенсивному потоку текучей среды проходить через отверстие 114.
В представленном на Фиг.1 варианте привод 108 включает стопоры перемещения 160 и 162. Представленные стопоры перемещения 160 соответствуют полностью открытому положению или положению перемещения привода 108 (см. Фиг.2А) на 100%, т.е. максимальной или наивысшей крайней точке перемещения. Представленные стопоры перемещения 162 соответствуют полностью закрытому положению или положению перемещения привода 108 (см. Фиг.2С) на 0%, т.е. минимальной или самой низкой крайней точке перемещения. На Фиг.2В показан поршень 130 в промежуточном положении, посредине между стопорами 160 и 162, а следовательно, это соответствует положению перемещения на 50%. В некоторых примерах стопоры перемещения 160 и/или 162 являются регулируемыми.
Согласно Фиг.1 для измерения положения привода 108, представленный на Фиг.1 клапанный узел 102 включает датчик положения 110. Представленный на Фиг.1 датчик положения 110 измеряет и/или ощущает положение индикатора перемещения 140 по отношению к неподвижному датчику положения 110 и образует на выходе или подает сигнал 170, отражающий текущее положение индикатора перемещения 140, а следовательно, и положение клапана 106 (например, в процентах по отношению к открытому положению или к полному перемещению). Представленный датчик положения 110 является линейным набором датчиков на эффекте Холла и образует на выходе аналоговый сигнал 170, имеющий различные значения (например, напряжения или тока) для различных положений индикатора перемещения 140. Показанный на Фиг.1 аналоговый сигнал представляет абсолютное перемещение или положение индикатора перемещения 140. Например, если привод 108 имеет длину полного рабочего хода 100 миллиметров (мм), а сигнал положения 170 варьируется между 0 и 40 милливольт (мВ), то при перемещении клапанного штока 122 на 10% аналоговый сигнал 170 изменяется на 4 мВ, что составляет 10% от 40 мВ. Аналоговый сигнал 170 имеет первое действительное значение перемещения и/или напряжение (PTV), когда индикатор перемещения 140 находится в первом положении, соответствующем контакту поршня 130 со стопорами 162 (Фиг.2С), имеет второе PTV, когда индикатор перемещения 140 находится во втором положении, соответствующем контакту поршня 130 со стопорами 160, и имеет диапазон возможных PTV между первым PTV и вторым PTV при нахождении индикатора перемещения 140 между первым и вторым положениями. Например, если поршень 130 находится на полпути между стопорами 160 и 162 (Фиг.2В), то аналоговый сигнал 170 имеет PTV, находящееся на середине диапазона между первым и вторым PTV. В некоторых примерах датчик положения 110 может измерять больший диапазон перемещений, чем диапазон перемещения, физически поддерживаемого приводом 108, то есть длина датчика положения 110 может превышать длину полного рабочего хода привода 108. Показанный на Фиг.1 датчик положения 110 образует аналоговый выходной сигнал 170, однако, в дополнительном или альтернативном варианте датчик положения может образовывать на выходе цифровой сигнал, имеющий цифровые значения, представляющие относительное положение индикатора перемещения 140. Кроме того, аналоговый сигнал 170 на выходе датчика положения 110 может до его обработки преобразовываться контроллером 104 положения клапана в цифровой сигнал.
Представленный на Фиг.1 контроллер 104 положения клапана может сам себя калибровать от единственного поданного извне значения положения (РРР), представляющего текущее положение (например, на 70% открытое) привода 108 или его расчетное и/или приближенное значение. Как описано здесь, контроллеру положения клапана 104 не нужны дополнительные, подаваемые извне, значения положения до начала работы этого контроллера 104 в составе технологической линии. Кроме того, нет необходимости регулировать или изменять положение привода 108 или выполнять полный рабочий ход до начала работы представленного на ФИГ.1 клапанного устройства 100 в составе технологической линии. Единственное значение положения РРР может легко и/или просто определить и/или рассчитать наладчик путем, например, визуального определения (например, оценки) и/или измерения текущего положения индикатора положения 140 в процессе, например, установки контроллера положения клапана 104. Наладчик предоставляет и/или вводит рассчитанное или измеренное значение положения РРР в контроллер положения клапана 104 через, например, устройство ввода 640 контроллера положения клапана 104 (Фиг.6). Хотя представленный контроллер положения клапана 104 может сам себя калибровать исходя из единственного расчетного значения положения, однако, при наличии дополнительных значений положения, представляющих собой либо рассчитанные, либо измеренные значения, введенные наладчиком и/или определенные путем выполнения полного рабочего хода клапана 106, такие дополнительные значения можно использовать, например, для повышения точности калибровки.
Исходя из единственного рассчитанного значения положения РРР и значения чувствительности SENSITIVITY, представляющего собой изменение PTV 170 на единицу длины перемещения индикатора положения 140, и из значения длины полного рабочего хода клапана, представленный на Фиг.1 контроллер положения клапана 104 рассчитывает PTV 170, которые, как ожидается и/или прогнозируется, должны соответствовать крайним точкам перемещения привода 108 клапана. В альтернативном варианте значение SENSITIVITY представляет собой число импульсов, соответствующее полному рабочему ходу клапана 106. И кроме того, значение SENSITIVITY может представлять собой изменение PTV 170 по всей длине рабочего хода клапана 106. Согласно Фиг.3 в момент времени Т1 представленный на ФИГ.1 клапанный узел 102 открыт на 75% и имеет PTV 170, соответствующее текущему открытому на 75% положению; он имел бы PTV 170 значением HI_АСТ, если бы привод 108 находился в полностью открытом (100%) положении, и имел бы PTV 170 значением LO_ACT, если бы привод 108 находился в полностью закрытом (0%) положении. В момент времени Т2 контроллер положения клапана 104 вычисляет первое значение HI_CAL, соответствующее рассчетному или ожидаемому полностью открытому положению привода 108 и вычисляет второе значение LO_CAL, соответствующее рассчетному или ожидаемому полностью закрытому положению привода 108. Если значения РРР и SENSITIVITY достаточно точные, то значение HI_CAL практически равно HI_ACT, a значение LO_CAL практически равно LO_ACT. Однако на практике значение РРР является оценочным (например, измеренным с ошибкой значением) значением положения привода 108, и/или значение SENSITIVITY может быть неточным вследствие допусков при изготовлении и/или отклонений от положения совмещения при установке. Соответственно, в некоторых примерах представленный на Фиг.1 контроллер положения клапана 104 намеренно корректирует расчетные значения крайних точек перемещения таким образом, что рассчетный и/или прогнозируемый диапазон перемещения, представленный значениями HI_АСТ и LO_ACT, охватывает больший диапазон перемещения привода 108, как показано в момент времени Т3.
Значения HI_АСТ и LO_ACT можно вычислять, пользуясь следующим математическим выражением, при условии, что сигнал обратной связи 170 увеличивается по мере открывания клапана 104:


где RAF - коэффициент поправки расстояния (если, например, он равен 0,1, то значение HI_CAL повысится на 10%, а значение LO_CAL снизится на 10%,) а значение РРР является выраженным в процентах значением перемещения привода 108. И напротив, если сигнал обратной связи 170 уменьшается по мере открывания клапана 104, тогда значения HI_АСТ и LO_ACT можно вычислять, пользуясь следующим математическим выражением:


Применяя любое количество и тип (типы) способа (способов) алгоритма (алгоритмов) и/или логики, представленный на Фиг.1 контроллер положения клапана 104 сравнивает значение PTV 170, генерируемое датчиком положения 110, с управляющим сигналом 180, полученным от контроллера процесса 185, представляющим собой желаемое положение и/или заданную точку (SР) положения клапана 106 (например, открытое на 40%) для того, чтобы определить, каким образом следует откорректировать и/или поддерживать давление (давления) управляющей текучей среды, подаваемой в камеры 136 и 137, исходя из расчетных значений крайних точек HI_CAL и LO_CAL. Например, исходя из значений HI_CAL и LO_CAL, представленный контроллер 104 вычисляет значение TARGET для сигнала положения 170 соответствующее желаемому положению клапана 106. Затем контроллер положения клапана 104 корректирует давления в камерах 136 и 137 до тех пор, пока действительное значение PTV 170 будет практически соответствовать или равняться значению TARGET. Это значение TARGET можно вычислить, воспользовавшись следующим математическим выражением:

Во время работы в составе технологической линии, представленного на ФИГ.1 клапанного устройства 100, контроллер положения клапана 104 адаптирует, корректирует и/или обновляет расчетные значения крайних точек перемещения HI_CAL и LO_CAL, используя любое количество и/или любой тип (типы) алгоритма (алгоритмов), логики, критериев и/или способа (способов). Если в процессе работы технологической линии поршень 130 достигает любого из своих физических стопоров перемещения 160, 162, то представленный контроллер 104 корректирует соответствующее калиброванное значение HI_CAL, LO_CAL. Определить момент, когда поршень 130 достигает стопора 160, 162, можно путем обнаружения того, что PTV 170 больше не изменяется, несмотря на то, что давление, прикладываемое к поршню 130, должно приводить к перемещению поршня 130. Например, в момент времени Т4 по Фиг.3 поршень достигает стопоров 160 полностью открытого (100%) положения, и контроллер положения клапана 104 обновляет значение HI_CAL так, чтобы оно соответствовало текущему значению PTV 170, которое равно HI_АСТ. Аналогично, если в момент времени Т5 поршень достигает стопоров 162 полностью закрытого (0%) положения, то контроллер положения клапана 104 обновляет значение LO_CAL так, чтобы оно соответствовало текущему значению PTV 170, которое равно LO_ACT.
В некоторых обстоятельствах могут присутствовать эффекты, ухудшающие позиционирование клапана с помощью способа калибровки, представленного на Фиг.3. В представленном на Фиг.3 примере калибровочные значения HI_CAL и LO_CAL полностью корректируются каждый раз, когда поршень 130 достигает соответствующего стопора перемещения 160, 162, потенциальным результатом чего является смещение клапана 106 от соответствующих крайних точек 160, 162. Например, если поршень 130 должен достичь стопоров 162 полностью закрытого положения при значении SP 180, соответствующем открытому на 5%, то значение LO_CAL должно быть немедленно и полностью откорректировано, как описано выше, контроллер положения клапана 104 немедленно отреагирует, открыв клапан 106 на 5%, приводя к резкому изменению потока рабочей среды. Такое изменение положения клапана может нарушить текущий технологический процесс и/или иметь другие негативные последствия.
Согласно Фиг.1 для снижения вероятности таких эффектов другой представленный способ самокалибровки корректирует калибровочные значения HI_CAL и LO_CAL только тогда, когда контроллер процесса 104 установит SP 180 за пределы значения, при котором клапан 106 достигает одного из пределов своего перемещения. В таких обстоятельствах соответствующее значение HI_CAL или LO_CAL может быть откорректировано без изменения положения клапана 106. Когда сигнал SP 180 действительно достигает и 0%, и 100%, калибровка соответствующих крайних точек HI_CAL, LO_CAL будет завершена. В противном случае калибровка этих крайних точек HI_CAL, LO_CAL остается частично незавершенной.
Допустим что начальные значения HI_CAL и LO_CAL вычислены для представления расширенного диапазона перемещения, как описано выше для Фиг.3, если контроллер 104 клапана обнаруживает, что клапан достиг положения 0%, например, обнаружив, что давление привода прижимает поршень 130 к стопорам 162, то значение LO_CAL может быть обновлено с помощью следующего математического выражения:

Если значение SP 180 меньше 0%, то значение SP 180 в уравнениях (6)-(9) будет установлено на 0%. Для снижения вероятности ошибок управления, вызванных, например, искажениями сигнала, имеющимися в поступающем по обратной связи сигнале положения 170, для обновления значения LO_CAL можно применить следующее математическое выражение, включающее коэффициент надежности 1%:

Значение HI_CAL можно обновлять аналогично, используя одно из следующих математических выражений, в том случае, когда контроллер 104 обнаруживает, что клапан 106 достиг своей физической остановки в открытом на 100% положении, например, обнаружив, что давление привода прижало поршень 130 к стопорам 160.


Уравнение (9), как и Ур-е (7), включает 1% коэффициент надежности.
Фиг.4 иллюстрирует пример обновления LO_CAL с помощью представленного Уравнения (6) или Уравнения (7). В представленном на Фиг.4 примере давление привода 405 снижается во время нормального процесса работы. В какой-то момент времени 410 значение SP 180 падает ниже значения, при котором привод 108 достигает полностью закрытого положения 0%. Однако вследствие неточной калибровки значение SP 180 все еще превышает 0%. Из-за усиления контроллера давление 405 привода 405 быстро снижается, в то время как SP 180 продолжает уменьшаться. Представленный на Фиг.1 контроллер положения клапана 104 по низкому давлению привода 405 узнает, что привод 108 полностью закрыт, и обновляет LO_CAL до нового минимального значения, воспользовавшись одним из математических выражений по Уравнению (6) или Уравнению (7), тем самым повысив на 5% точность значения LO_CAL в примере по Фиг.4. Если значение SP 180 будет проведено полностью до положения 0%, то калибровка LO_CAL была бы выполнена практически идеально. В некоторых примерах Уравнения (6) и (7) применяются по несколько раз в то время, как привод 108 остается в полностью закрытом 0% положении, а SP 180 изменяется. В дополнительном или альтернативном варианте Уравнение (6) или (7) применяют для наименьших значений SP 180, наблюдаемых, когда привод 108 находится в полностью закрытом 0% положении.
Возвращаясь к Фиг.1, следует отметить, что в некоторых примерах нужное из представленных Уравнений (6)-(9) применяется каждый раз, когда поршень 130 достигает соответствующих крайних точек перемещения 160, 162 и/или находится там.
В других примерах, когда SP 180 достигает значения, при котором клапан 106 доходит до одного из пределов своего перемещения, представленный на Фиг.1 контроллер положения клапана 104 записывает значение PTV 170. Впоследствии, при каждом изменении SP 180 на величину, исключающую активацию под влиянием шумов, представленный контроллер положения клапана 104 выполняет небольшую коррекцию соответствующего калибровочного значения LO_CAL, HI_CAL, которая уменьшает разность между записанным PTV 170 и соответствующим калибровочным значением LO_CAL, HI_CAL. Путем медленного изменения калибровочных значений LO_CAL и HI_CAL за то время, пока изменяется SP 180, можно снизить, минимизировать и/или устранить прерывания любого выполняемого технологического процесса (процессов). В некоторых примерах скорость калибровочной коррекции ограничена до 0,1% от полной величины перемещения в минуту или одного шага перемещения в минуту. В зависимости от динамического свойства SP 180 (например, на какую величину и/или с какой скоростью изменяется SP 180) может потребоваться снизить и/или повысить скорость калибровочной коррекции.
В описанных выше примерах за основу брались изначально и умышленно расширенные калибровочные значения HI_CAL и LO_CAL, однако, в альтернативном варианте контроллер 104 может изначально недооценивать диапазон перемещения привода 108, как показано на Фиг.5. Сжатые калибровочные значения HI_CAL и LO_CAL могут быть вычислены с помощью, например, уравнений (1)-(4) со значением RAF, равным -0,1. Если в момент времени Т4 привод 108 продолжает перемещаться под действием перепада давлений в камерах 136, 137, но значение PTV 170 превысило действующее значение HI_CAL, то это значение HI_CAL корректируется с тем, чтобы оно отражало текущее значение PTV. Нижний расчетный предел перемещения LO_CAL корректируется аналогично, как показано для момента времени Т5. В тех случаях, когда SP 180 не может превысить значений, соответствующих положению клапана от 0% до 100%, клапан 106 может не достигать своих крайних точек перемещения, и, следовательно, калибровка значений HI_CAL и LO_CAL согласно иллюстрации на Фиг.5 не может быть возможной.
Допустим что SP 180 может превосходить значения, соответствующие положениям клапана от 0% до 100%, тогда калибровочные значения HI_CAL и LO_CAL могут корректироваться в качестве дополнения или альтернативы, если SP 180 выходит за пределы диапазона 0%-100%. В некоторых примерах контроллер 104 осуществляет выход на предел, намеренно прижимая привод 108 к одному из комплектов механических стопоров 160, 162, когда SP 180 достигает соответствующего заданного значения (например, 5% или 95%). В таких вариантах может быть полезным деактивировать функцию выхода на предел при использовании изначально сжатых калибровочных значений HI_CAL и LO_CAL. Если SP 180 выходит за пределы этого диапазона и изменяется на величину, исключающую активацию под влиянием шумов, а давление привода не прижимает поршень 130 к соответствующим стопорам 160, 162, то представленный контроллер положения клапана 104 корректирует соответствующее калибровочное значение HI_CAL, LO_CAL на небольшую величину, что вынуждает привод 108 перемещаться по направлению к стопорам 160, 162 и/или прижиматься к ним. С течением времени одно или несколько из перечисленных выше условий не будет выполняться, и калибровка будет практически завершена. В некоторых примерах калибровочное значение HI_CAL, LO_CAL корректируется несколько раз, когда поршень 130 не прижат, а SP 180 изменяется и находится за пределами диапазона 0-100%. В дополнительном или альтернативном варианте калибровочное значение HI_CAL, LO_CAL корректируется, используя максимально значение SP 180, выходящее за пределы указанного диапазона при не прижатом поршне 130.
В других вариантах, когда SP 180 достигает такого значения, когда клапан 106 достигает одного из своих пределов перемещения, представленный на Фиг.1 контроллер положения клапана 104 записывает значение PTV 170. Впоследствии при каждом изменении SP 180 на величину, исключающую активацию под влиянием шумов, представленный контроллер положения клапана 104 выполняет небольшую корректировку соответствующего калибровочного значения LO_CAL, HI_CAL, уменьшающую различие между записанным PTV 170 и соответствующим калибровочным значением LO_CAL, HI_CAL. Медленное изменение калибровочного значения LO_CAL, HI_CAL за время изменения SP 180 позволяет уменьшить, минимизировать и/или устранить возможности прерывания рабочего процесса (процессов). В некоторых вариантах скорость калибровочной коррекции ограничена величиной 0,1% от полной величины перемещения в минуту или от шага перемещения в минуту. В зависимости от динамических свойств SP 180 (например, от величины и скорости изменения SP 180) может понадобиться повысить и/или снизить скорость калибровочной коррекции.
В то время, как описанные выше способы калибровки клапанов могут автоматически применять и/или активировать новые значения LO_CAL и HI_CAL в процессе их вычисления, в дополнительном или альтернативном варианте новые значения LO_CAL и/или HI_CAL записываются и/или применяются только тогда, когда контроллер положения клапана 104 имеет специальные инструкции и/или указания на этот счет. Например, контроллер положения клапана 104 может воспроизводить на дисплее 645 (Фиг.6) указатель, свидетельствующий о том, что одно или несколько новых калибровочных значений LO_CAL, HI_CAL имеются в наличии для активации. Используя, например, устройство (устройства) ввода 640, пользователь дает указания о том, что следует применить новые и/или обновленные калибровочные значения LO_CAL, HI_CAL, тогда контроллер положения клапана 104 начинает использовать эти активированные калибровочные значения LO_CAL, HI_CAL в ходе последующих операций управления клапаном.
В других примерах может быть воплощена комбинация способов калибровки, описанных выше. Например, если будет обнаружено, что поршень 130 прижат к стопорам 160, 162 значением SP 180, которое находится внутри диапазона 0-100%, то можно применить один из способов калибровки, описанных выше для случая с изначально расширенным диапазоном. Однако, если будет обнаружено, что SP 180 находится за пределами диапазона 0-100%, то можно применить один из способов калибровки, описанных выше для изначально сжатого диапазона. В других примерах вместо того, чтобы умышленно расширять или сжимать начальные калибровочные значения HI_CAL и LO_CAL, их оценивают и/или вычисляют как можно точнее с помощью соответствующей (соответствующих) описанной выше процедуры (процедур) калибровки, применительно к наблюдаемым условиям.
Возвращаясь к Фиг.1, следует отметить, что для фиксации положения клапанного узла 102 на период установки, активации контроллера положения клапана 104, задания его конфигурации и/или вычисления им начальных расчетных значений крайних точек HI_CAL и LO_CAL, представленное на Фиг.1, устройство 100 включает любое количество и любой тип (типы) держателей, один из которых обозначен номером 190, предназначенных для того, чтобы обеспечивать фиксацию, удержание и/или поддержку клапанного узла в текущем положении. Примеры представленных держателей 190 включают (не ограничиваясь) зажим, фиксатор и/или ловушку для текучей среды.
На Фиг.6 показан в качестве примера вариант воплощения представленного на Фиг.1 контроллера положения клапана 104. Для приема сигнала положения 170 от цепи обратной связи, представленный на Фиг.6 контроллер положения клапана 104 содержит интерфейс 605 датчика положения. Используя любое количество и/или тип (типы) цепей, компонентов и/или устройств, представленный на Фиг.6 интерфейс 605 датчика положения модифицирует и/или преобразует сигнал обратной связи 170 в форму, пригодную для обработки контроллером клапана 610 и/или калибратором 615. Например, интерфейс 605 датчика положения может преобразовывать аналоговый сигнал 605 обратной связи в цифровые значения 607, представляющие текущее положение PTV индикатора перемещения 140. В качестве дополнения или альтернативы, если сигнал обратной связи 170 имеет разную полярность в зависимости от того, находится индикатор перемещения 140 над средней линией датчика положения 110 или под ней, то интерфейс 605 передатчика положения может смещать сигнал обратной связи 170 так, чтобы он, например, имел только положительные значения, до его преобразования в цифровые значения 607.
Для приема управляющего сигнала 180 представленный на Фиг.6 контроллер положения клапана 104 содержит интерфейс 620 управляющего сигнала. Используя любое количество и/или тип (типы) цепей, компонентов и/или устройств, представленный на Фиг.6 интерфейс 620 управляющего сигнала модифицирует и/или преобразует управляющий сигнал 180 в форму, пригодную для обработки представленным контроллером клапана 610. Например, интерфейс 620 управляющего сигнала может преобразовывать управляющий сигнал 180 в цифровые значения 622, представляющие требуемую заданную точку и/или положение SP привода 108.
Для управления значениями давлений сжатого воздуха, подаваемого в камеры 136 и 137, представленный на Фиг.6 контроллер положения клапана 104 содержит контроллер давления 625. Используя любое количество и/или типы цепей, компонентов и/или устройств и исходя из значений управляющего давления 627, предоставляемых контроллером клапана 610, представленный контроллер давления 625 определяет, следует повысить или снизить значения давления сжатого воздуха, подаваемого по линиям 152 и 154.
Используя любое количество и/или типы способов, алгоритмов и/или логики, представленный на Фиг.6 контроллер клапана 610 сравнивает цифровые значения положения 607 с требуемыми значениями 622 заданных точек и/или положения для того, чтобы определить значения управляющего давления 627, то есть каким образом нужно откорректировать значение (значения) давления управляющей текучей среды, подаваемой в камеры 136 и 137. Как описано выше в отношении к Фиг.1 и Уравнению (5), контроллер клапана 610 определяет значения управляющего давления 627 исходя из расчетных значений крайних точек HI_CAL и LO_CAL
Для определения и обновления расчетных значений цифровых величин 607 HI_CAL и LO_CAL, соответствующих прогнозируемым крайним точкам перемещения привода 108, представленный на Фиг.6 контроллер положения клапана 104 включает представленный калибратор 615. Для вычисления начальной пары расчетных значений HI_CAL и LO_CAL, исходя из единственного подаваемого извне значения положения РРР, представленный калибратор 615 содержит устройство расчета 617 крайних точек. Применив, например, математические выражения уравнений (1)-(4), представленное устройство расчета 617 крайних точек вычисляет начальные значения HI_CAL и LO_CAL.
Для того чтобы в процессе работы представленного на Фиг.1 клапанного устройства 100, работающего в составе технологической линии, обновлять значения HI_CAL и LO_CAL, соответствующие прогнозируемым крайним точкам перемещения привода 108, представленный калибратор 615 содержит корректировщик крайних точек 619. Применяя, например, любой из способов, описанных выше по отношению к Фиг.1 и 3-5, и/или математические выражения уравнений (6)-(9), представленный корректировщик крайних точек 619 обновляет значения HI_CAL и LO_CAL, не прерывая процесс работы контроллера положения клапана 104. Следует понимать, что представленный корректировщик крайних точек 619 можно в качестве альтернативы или дополнения использовать для вычисления и/или обновления значений HI_CAL и LO_CAL, если специально выполнить полный рабочий ход клапана 106 с целью калибровки.
Для хранения значений управляющих переменных представленный на Фиг.6 контроллер положения клапана 104 содержит накопитель 630. Накопитель 630 может хранить управляющие переменные с любым количеством и типом (типами) структур данных, указанный накопитель 630 может быть выполнен с применением любого количества и типа (типов) энергозависимой и/или энергонезависимой памяти, устройства (устройств) памяти и/или накопительных устройств, например, накопителя на жестком диске. Примеры управляющих переменных, которые могут храниться в представленном накопителе 630, включают (не ограничиваясь) подаваемое извне значение положения РРР, значение чувствительности SENSITIVITY, а также расчетные значения крайних точек перемещения HI_CAL и LO_CAL.
Для предоставления возможности пользователю вводить значения положения РРР и/или значение чувствительности SENSITIVITY представленный на Фиг.6 контроллер положения клапана 104 содержит пользовательский интерфейс 634 любого типа, устройство (устройства) ввода 640 в любом количестве и/или любого типа, а также дисплей 645 любого типа. В некоторых вариантах пользовательский интерфейс 635 дает подсказку через дисплей 645, сигнализирующую пользователю и/или дающую указание пользователю обеспечить и/или ввести значения РРР и/или SENSITIVITY. Примеры устройств ввода 640 включают (не ограничиваясь) цифровой коммуникационный интерфейс и/или клавиатуру. В некоторых вариантах может использоваться сенсорный экран, воплощающий в себе как дисплей 645, так и устройство ввода 640.
На Фиг.6 представлен способ воплощения представленного на Фиг.1 контроллера положения клапана 104, однако, представленные на Фиг.6 один или несколько интерфейсов, структуры данных, элементы, процессы и/или устройства можно комбинировать, делить, переставлять, не включать, исключать и/или воплощать любым другим способом. Кроме того, представленный интерфейс 605 датчика положения, калибратор 615, представленное устройство расчета крайних точек 617, представленный корректировщик крайних точек 619, представленный интерфейс управляющего сигнала 620, представленный контроллер давления 625, представленный накопитель 630, представленный пользовательский интерфейс 635, представленное входное устройство (устройства) 640, представленный дисплей 645 и/или в более общем смысле, весь контроллер положения клапана 104 по Фиг.6 можно воплотить с помощью материальной части, аппаратных средств, программного обеспечения и/или любой комбинации материальной части, программного обеспечения и/или аппаратных средств. Таким образом, например, любой представленный интерфейс 605 датчика положения, представленный калибратор 615, представленное устройство расчета 617 крайних точек, представленный корректировщик крайних точек 619, представленный интерфейс управляющего сигнала 620, представленный контроллер давления 625, представленный накопитель 630, представленный пользовательский интерфейс 635, представленное входное устройство (устройства) 640, представленный дисплей 645 и/или в более общем смысле, весь контроллер положения клапана 104 можно воплотить с помощью одной или нескольких цепей, программируемого процессора (процессоров), интегральной схемы (схем) специального назначения ИССН (ASIC), программируемого логического устройства (устройств) ПЛУ (PLD), программируемого пользователем логического устройства (устройств) ППЛУ (FPLD), программируемой пользователем логической матрицы (матриц) ППЛМ (FPGA) и т.п. Если в каком-либо пункте формулы настоящего изобретения описано воплощение в виде чисто программного обеспечения и/или аппаратных средств, то тем самым отчетливо выражается, что, по меньшей мере, либо представленный интерфейс датчика положения 605, либо представленный калибратор 615, либо представленное устройство расчета крайних точек 617, либо представленный корректировщик крайних точек 619, либо представленный интерфейс управляющего сигнала 620, либо представленный контроллер давления 625, либо представленный накопитель 630, либо представленный пользовательский интерфейс 635, либо представленное устройство (устройства) ввода 640, либо представленный дисплей 645 и/или в более общем смысле, контроллер положения клапана 104 содержит материальный компьютерно-читаемый носитель. Примеры материальных компьютерно-читаемых носителей включают (не ограничиваясь) флэш-память, компакт-диск (CD), цифровой видеодиск (DVD), гибкий диск, постоянное запоминающее устройство ПЗУ (ROM), запоминающее устройство с произвольной выборкой ЗУПВ (RAM), программируемое ЗУПВ (PROM), электронно-программируемое ЗУПВ (EPROM), и/или электронно-перепрограммируемое ЗУПВ (EEPROM), оптический диск, оптическое запоминающее устройство, магнитный диск, магнитное запоминающее устройство и/или любой другой материальный накопитель, который может использоваться для хранения программного кода и/или инструкций в форме машиночитаемых инструкций или структур данных, и являющийся доступным для процессора, компьютера и/или другой машины, имеющей процессор, такой, как представленная процессорная платформа Р100, которая будет описана ниже при описании Фиг.16. Комбинации вышеуказанного также входят в понятие материальных компьютерно-читаемых накопителей. Кроме того, представленный контроллер положения клапана 104 может включать интерфейсы, структуры данных, элементы, процессы и/или устройства, заменяющие или дополняющие те, которые представлены на Фиг.6, и/или может включать больше одного из показанных интерфейсов, структур данных, элементов, процессов и/или устройств, или любое из перечисленного, или все перечисленное.
На Фиг.7 представлен вариант процесса, который можно применить для установки представленного на Фиг.1 и Фиг.6 контроллера положения клапана 104. На Фиг.8-11 Представлены варианты процессов, которые можно выполнить для воплощения представленного на Фиг.6 калибратора 615, а также/или всего представленного на Фиг.1 и Фиг.6 контроллера положения клапана 104. Для выполнения представленных на Фиг.7-11 процессов можно применять и/или программировать процессор, контроллер и/или любое пригодное устройство обработки информации. Например, процессы по Фиг.7-11 можно воплотить в виде кодированных и/или доступных для машины инструкций, записанных в любом готовом изделии таком, как материальный компьютерно-читаемый накопитель, например, флэш-память, CD, DVD, гибкий диск, ПЗУ (ROM), ЗУПВ (RAM), программируемое ЗУПВ (PROM), электронно-программируемое ЗУПВ (EPROM), и/или электронно-перепрограммируемое ЗУПВ (EEPROM), оптический диск, оптическое запоминающее устройство, магнитный диск, магнитное запоминающее устройство и/или любой другой материальный накопитель, который может использоваться для хранения программного кода и/или инструкций в форме машиночитаемых инструкций или структур данных, и являющийся доступным для процессора, компьютера и/или другой машины, имеющей процессор такой, как представленная процессорная платформа Р100, которая будет описана ниже со ссылкой на Фиг.16. Комбинации вышеуказанного также входят в понятие реальных компьютерно-читаемых накопителей. Машиночитаемые инструкции содержат, например, инструкции и данные, которые вынуждают процессор, компьютер и/или машину, имеющую процессор, выполнять один или несколько конкретных процессов. В альтернативном варианте некоторые или все представленные на Фиг.7-11 операции можно воплотить, применив любую комбинацию (комбинации) таких устройств, как ИССН (ASIC), ПЛУ (PLD), ППЛУ (FPLD), ППЛМ (FPGA), дискретная логика, материальная часть, аппаратные средства и т.п. Кроме того, одну или несколько операций по Фиг.7-11 можно воплотить вручную или в виде комбинации любых из упомянутых технических средств, например, любой комбинации аппаратных средств, программного обеспечения, дискретной логики и/или материальной части. Кроме того, для воплощения представленных на Фиг.7-11 операций можно применить многие другие способы. Например, можно изменить порядок выполнения блоков и/или один или несколько из описанных блоков можно изменить, исключить, поделить или скомбинировать. Кроме того, любой машинный процесс по Фиг.7-11 или все эти процессы можно выполнять последовательно и/или выполнять параллельно посредством, например, отдельных потоков обработки, процессоров, устройств, отдельной логики, схем и т.п.
Представленный на Фиг.7 процесс начинается с того, что оператор и/или наладчик фиксирует или блокирует (например, фиксирует вручную) клапанный узел 102 в нужном положении с помощью представленного держателя 190 (блок 705). Например, оператор может вручную зафиксировать клапан 106 с помощью зажимов и/или фиксаторов, или же может зафиксировать положение привода 108 путем предотвращения перемещения (например, путем отвода) управляющей текучей среды внутри привода 108.
Подлежащий замене контроллер положения клапана извлекают (блок 710) и устанавливают заменяющий и/или новый контроллер положения клапана 104 (блок 715). Наладчик активирует (например, подает питание) контроллер положения клапана 104 и получает доступ к пользовательскому интерфейсу 635 (блок 720). Наладчик вводит данные конфигурации, например, такие, как значение чувствительности SENSITIVITY датчика положения 110 (например, считывая с ярлычка на позиционном сенсоре 110) (блок 725). Затем наладчик вводит одноточечное значение РРР индикатора положения 140 (блок 730). В некоторых вариантах положение РРР вводится в виде процентной доли от длины перемещения (например, открытое на 50%) привода 108.
Исходя из введенной информации контроллер положения клапана 104 вычисляет калибровочные значения LO_CAL и HI_CAL, а наладчик применяет эти значения (блок 740).
Наладчик переводит контроллер положения клапана 104 в активное состояние (блок 745) и разблокирует или освобождает из зафиксированного положения клапанный узел 102 (блок 750).
Представленные на Фиг.8-11 процессы выполняются каждый раз, когда контроллер положения клапана 104 получает через управляющий сигнал 180 инструкцию изменить положение клапанного узла 102, и в то время, когда контроллер положения клапана 104, реагируя на эту команду, изменяет положение клапанного узла 102. Представленный на Фиг.8 процесс соответствует примерам, показанным на Фиг.3 и 5. Представленный на Фиг.9 процесс соответствует обновлению калибровочного значения, выполняемому на основе представленных уравнений (6)-(9). Представленный на Фиг.10 процесс соответствует обновлению калибровочного значения, выполняемому на основе записанного PTV170 при достижении стопора перемещения. Представленный на Фиг.11 процесс соответствует обновлению калибровочного значения для SP 180, находящегося за пределами указанного диапазона. До первого выполнения представленных на Фиг. 8-11 процессов (например, когда контроллер 104 активируется в автоматический режим управления) представленное устройство оценки крайних точек 617 по Фиг.6 вычисляет начальные расчетные значения HI_CAL и LO_CAL, как описано выше по отношению к Фиг.1 и 6.
В представленном на Фиг.8 процессе рассматриваются пара бит состояния коррекции 0% и 100%, а также бит одноточечной калибровки состояния. Биты состояния коррекции 0% и 100% очищаются, а бит состояния одноточечной калибровки устанавливается, когда завершится одноточечная калибровка. Биты состояния коррекции 0% и 100% показывают, достигли ли клапан 106 и привод 108 границ перемещения соответственно 0% и 100% со времени выполнения одноточечной калибровки. Бит состояния одноточечной калибровки показывает, что одноточечная калибровка (потенциально неточная) выполнена (например, блок 740 по Фиг.7) и до сих пор не улучшена. В примере по Фиг.8 значения NEW_LO_CAL и NEW_HI_CAL являются новыми калибровочными значениями, которые были вычислены и/или установлены, но не применяются до тех пор, пока пользователь не примет решение это сделать. Представленный на Фиг.8 процесс начинается с того, что представленный контроллер клапана 610 определяет, достиг ли привод 108 полностью закрытого положения 0% (блок 805). Если полностью закрытое положение 0% достигнуто (например, достигнуты стопоры 162 перемещения 0%) (блок 805), то корректировщик крайних точек 619 определяет, установлен ли бит состояния, соответствующий калибровке полностью закрытого положения 0% (например, бит состояния коррекции 0%) (блок 810). Если бит полностью закрытого состояния 0% установлен (блок 810), то управление возвращается к блоку 805 для проверки, достигнут ли стопор перемещения 0%.
Если бит полностью закрытого состояния не установлен (например, значение NEW_LO_CAL еще не установлено) (блок 810), то корректировщик крайних точек 619 записывает текущее значение LO_ACT сигнала обратной связи 170 как NEW_LO_CAL (блок 815) и устанавливает бит полностью закрытого состояния (блок 820). Калибратор 615 сообщает пользователю (например, через представленный дисплей 645), что новые и/или улучшенные калибровочные данные готовы к применению (блок 835). Если пользователь не применяет это новое значение (значения) (блок 840), то он получает повторное сообщение о наличии улучшенных данных, и управление возвращается к блоку 805 для того, чтобы проверить, достигнут ли стопор перемещения 0%.
Если пользователь применяет только одно из новых значений (блок 845), то он получает повторное сообщение о наличии улучшенных данных, и управление возвращается к блоку 805 для того, чтобы проверить, достигнут ли стопор перемещения 0%. Если применены как NEW_LO_CAL, так и NEW_HI_CAL (блок 845), то обновленные значения крайних точек LQ_CAL и HI_CAL записываются в накопителе 630, и бит состояния одноточечной калибровки очищается, показывая, что любые возможные неточности исправлены (блок 845). Исполнительная функция представленного калибратора 615 окончена (блок 850), и управление выходит из представленного на Фиг.8 процесса.
Возвращаясь к блоку 805, следует отметить, что, если стопор полностью закрытого положения 0% не достигнут (блок 810), то контроллер клапана 610 определяет, достигнут ли стопор полностью открытого положения 100% (блок 860).
Если полностью открытое положение 100% достигнуто (блок 860), то корректировщик 619 определяет, установлен ли бит полностью открытого состояния 100% (блок 865). Если бит полностью открытого состояния 100% установлен (блок 865), то управление возвращается к блоку 805 для проверки того, достигнут ли стопор 0% перемещения.
Если бит полностью открытого состояния 100% не установлен (например, значение NEW_HI_CAL еще не установлено) (блок 865), то корректировщик крайних точек 619 записывает текущее значение HI_АСТ сигнала обратной связи 170 как NEW_HI_CAL (блок 870) и устанавливает бит полностью открытого состояния 100% (блок 875). Затем управление переходит к блоку 835, чтобы сообщить пользователю об этих новых калибровочных данных.
Представленный на Фиг.9 процесс начинается с того, что представленный корректировщик крайних точек 619 ожидает, пока поршень 130 прижмется к любому из стопоров 160, 162 (блок 905). Когда поршень 130 прижмется (блок 905), то корректировщик крайних точек 619 определяет, изменяется ли SP 180 по направлению к стопору 160, 162 (блок 910). Если SP 180 изменяется по направлению к стопору 160, 162, к которому прижимается поршень (блок 910), то корректировщик крайних точек 619 обновляет соответствующее калибровочное значение HI_CAL, LO_CAL, используя соответствующее уравнение из Уравнений (6)-(9) (блок 915).
Если SP 180 больше не изменяется по направлению к стопору 160, 162 (блок 910), то управление возвращается к блоку 905, чтобы определить, прижат ли поршень 130 к механическому ограничителю 160, 162. В представленном на Фиг.9 примере автоматически применяются обновленные калибровочные значения HI_CAL и LO_CAL. В качестве дополнения или альтернативы, если обновленные калибровочные значения HI_CAL и LO_CAL не применяются автоматически, то появится сообщение, и может быть выполнен процесс применения новых калибровочных данных, практически подобный описанному по отношению к блокам 835, 840, 845, 850 и 855 по Фиг.8.
Представленный на Фиг.10 процесс начинается с того, что представленный корректировщик крайних точек 619 определяет, прижат ли поршень 130 к любому из стопоров 160, 162 (блок 1005). Если поршень 130 прижат (блок 1005), то корректировщик крайних точек 619 записывает текущее значение PTV 170 (блок 1010) и определяет, изменяется ли SP 180 по направлению к этому стопору 160, 162 (блок 1015). Если SP 180 изменяется по направлению к прижимаемому стопору 160, 162 (блок 1015), то корректировщик крайних точек 619 обновляет соответствующее калибровочное значение (значения) HI_CAL, LO_CAL в соответствии (но не обязательно делая равным) с указанным записанным значением (значениями) PTV 170 (блок 1020). Например, калибровочное значение HI_CAL, LO_CAL обновляется, изменяясь на процентную долю от разности между калибровочным значением HI_CAL, LO_CAL и соответствующим записанным значением PTV 170. Если обновленные калибровочные значения HI_CAL и LO_CAL равны соответствующим им записанным значениям PTV (блок 1025), то управление выходит из представленного на Фиг.10 процесса, поскольку какие-либо дополнительные корректировки калибровочного значения невозможны и/или не нужны. Если любое из обновленных калибровочных значений HI_CAL и LO_CAL не равно соответствующему записанному значению PTV (блок 1025), то управление возвращается к блоку 1015.
Возвращаясь к блоку 1005, следует отметить, что если поршень 130 не прижат (блок 1005), то управление остается в блоке 1015, чтобы определить, изменяется ли SP 180.
В представленном на Фиг.10 примере обновленные калибровочные значения применяются автоматически. В качестве дополнения или альтернативы, если обновленные калибровочные значения HI_CAL и LO_CAL не применяются автоматически, то появится сообщение, и может быть выполнен процесс применения новых калибровочных данных, практически подобный описанному по отношению к блокам 835, 840, 845, 850 и 855 по Фиг.8.
Представленный на Фиг.11 процесс начинается с того, что представленный корректировщик крайних точек 619 ждет, пока SP 180 выйдет за пределы диапазона 0-100% (блок 1105). Когда SP 180 выйдет за пределы диапазона 0-100% (блок 1105), корректировщик крайних точек 619 определяет, прижат ли поршень 130 к любому из стопоров 160, 162 (блок 1110). Если поршень 130 прижат (блок 1110), то управление возвращается к блоку 1105.
Если поршень 130 не прижат (блок 1110), то корректировщик крайних точек 619 корректирует соответствующие калибровочные значения HI_CAL, LO CAL таким образом, чтобы поршень 130 двигался к соответствующему стопору 160, 162 (блок 1120).
Если SP 180 не изменяется (блок 1115), поршень 130 прижимается к механическому ограничителю 160, 162 (блок 1110), или SP 180 возвращается назад в диапазон 0-100% (блок 1105), то управление возвращается к блоку 1105 в ожидании момента, когда SP 180 опять выйдет за пределы диапазона 0-100%.
В представленном на Фиг.11 примере обновленные калибровочные значения применяются автоматически. В дополнительном или альтернативном варианте, если обновленные калибровочные значения HI_CAL и LO_CAL не применяются автоматически, то появится сообщение, и может быть выполнен процесс применения новых калибровочных данных, практически подобный описанному по отношению к блокам 835, 840, 845, 850 и 855 по Фиг.8.
На Фиг.12 представлено клапанное устройство 1200, включающее представленный клапанный узел 102 и передатчик положения 1205, изготовленный в соответствии с настоящим изобретением. Поскольку элементы представленного на Фиг.12 устройства 1200 идентичны описанным выше по отношению к представленному на Фиг.1 устройству 100, то описание идентичных элементов здесь повторяться не будет. Вместо этого, идентичным элементам на Фиг.1 и Фиг.12 присвоены идентичные числовые обозначения, и полное описание элементов с идентичными числовыми обозначениями заинтересованный читатель может найти в описании, относящемся к Фиг.1.
Для того чтобы сигнал положения (POS_SIG) 1210, представляющий положения клапанного узла, подать, например, к представленному контроллеру процесса 185, и/или к системе контроля, к устройству контроля, к автоматической системе отключения и/или системе блокирования процесса 1215, представленное на Фиг.12 клапанное устройство 1200 содержит представленный передатчик положения 1205. Представленный на Фиг.12 передатчик положения 1205 вычисляет и/или определяет значение POS_SIG 1210 исходя из PTV 170. Например, передатчик положения 1205 может вычислить POS_SIG 1210, применив следующее математическое выражение

где MAX - это значение POS_SIG 1210, соответствующее полностью открытому клапану, a MIN - это значение POS_SIG 1210, соответствующее полностью закрытому клапану. В некоторых примерах MIN составляет 4 мА, а МАХ составляет 20 мА. Значения LO_CAL и HI_CAL вычисляются, отбираются и/или обновляются передатчиком положения 1205 описанным ниже способом.
Представленный на Фиг.12 передатчик положения 1205 может сам себя калибровать исходя из единственного подаваемого извне значения положения РРР, которое представляет текущее положение (например, открытое на 70%) привода 108, или расчетное значение его, или приближенное значение его. Как уже отмечалось здесь, до начала работы в составе технологической линии клапанного устройства 1200, передатчику положения 1205 не требуется никаких дополнительных, вводимых извне значений. Кроме того, до начала работы клапанного устройства 1200 в составе технологической линии не требуется изменять или регулировать положение привода 108 или вынуждать его выполнить полный рабочий ход. Наладчик может легко и/или просто определить единственное значение положения РРР, например, визуально (например, визуальной оценкой), и/или измерив текущее положение индикатора положения 140, например, во время установки передатчика положения 1205. Наладчик предоставляет и/или вводит оцененное или измеренное значение положения РРР в передатчик положения с помощью, например, устройства ввода 640 передатчика положения 1205 (Фиг.13). Хотя представленный передатчик положения 1205 может сам себя калибровать исходя из единственного расчетного значения положения РРР, однако, если имеются дополнительные значения положения, полученные либо путем оценки, либо измерениями, поданные наладчиком и определенные в результате выполнения полного рабочего хода клапана 106, то такие дополнительные значения могут быть использованы, например, для повышения точности калибровки.
Исходя из единственного расчетного значения положения РРР, полного значения перемещения клапана и привода, а также значения чувствительности SENSITIVITY (которое представляет собой изменение PTV 170 на единицу длины перемещения индикатора положения 140), представленный на Фиг.12 передатчик положения 1205 рассчитывает значения PTV 170, ожидаемые или прогнозируемые для крайних точек перемещения клапанного привода 108. В альтернативном варианте значение SENSITIVITY представляет собой число импульсов, представляющее полный рабочий ход клапана 106. И кроме того, значение SENSITIVITY может представлять собой изменение значения PTV 170, происходящее за полный рабочий ход клапана 106. Согласно Фиг.5 в момент времени Т1 представленный на Фиг.12 клапанный узел 102 открыт на 75% и имеет значение PTV 170, соответствующее текущему положению 75%, он имел бы значение PTV 170, равное HI_ACT, если бы привод 108 был в полностью открытом 100% положении, и имел бы значение PTV 170, равное LO_ACT, если бы привод 108 находился в полностью закрытом 0% положении. В момент времени T2 передатчик положения 1205 вычисляет первое значение HI_CAL, соответствующее оцениваемому или ожидаемому полностью открытому положению привода 108, а также вычисляет второе значение LO_CAL, соответствующее оцениваемому или ожидаемому полностью закрытому положению привода 108. Если значения РРР и SENSITIVITY являются практически точными, то значение HI_CAL будет практически равным значению HI_АСТ, а значение LO_CAL будет практически равно значению LO_ACT. Однако на практике значение РРР является оценочным (т.е. измеренным с ошибкой) значением положения привода 108, а/или значение SENSITIVITY может быть неточным вследствие допусков при изготовлении и/или вследствие отклонений в совмещении при установке. Соответственно, в некоторых примерах представленный на Фиг.12 передатчик положения 1205 специально корректирует расчетные значения крайних точек таким образом, чтобы расчетный и/или прогнозируемый диапазон перемещения, представленный значениями HI_ACT и LO_ACT, охватывал меньший диапазон привода 108, как показано в момент времени Т3 на Фиг.5.
Значения HI_ACT и LO_ACT можно вычислить, используя следующее математическое выражение, при условии, что сигнал обратной связи 170 увеличивается по мере открывания клапана 104:


где OFF - это поправка (в процентах от расстояния перемещения) при оценке РРР, TRAVEL - это физическая длина полного хода или угол поворота клапана 106 в технических единицах измерения, a GAIN - это поправка (в процентах от расстояния перемещения) на калибровку сенсора 140, колебание сенсора 140, усиление и фильтрацию выходного сигнала 170 сенсора, а также/или преобразование выходного сигнала 170 сенсора из аналогового в цифровой.
Применив представленные математические выражения уравнений (10)-(12), представленный передатчик положения 1205 должен давать на выходе значения POS_SIGN 1210, соответствующие положениям клапана 0% и 100% в ходе последующей работы представленного клапанного устройства в составе технологической линии. В представленном на Фиг.12 примере представленный передатчик положения 1205 посылает в качестве выходного сигнала 1210 значение МАХ, представляющее открытое на 100% положение клапана до того, как клапан 106 в действительности достигнет открытого на 100% положения, а также посылает в качестве выходного сигнала 1210 значение MIN, представляющее открытое на 0% положение клапана до того, как клапан 106 в действительности достигнет полностью закрытого положения (0%).
Поскольку представленный на Фиг.12 передатчик положения 1205 работает в составе технологической линии, то этот представленный передатчик положения 1205 адаптирует, корректирует и/или обновляет расчетные значения крайних точек HI_CAL и LO_CAL. Если в процессе работы технологической линии программа внутри передатчика положения 1205 вычислит для POS_SIG 1210 значение, которое находится за пределами диапазона [MIN, MAX], то представленный передатчик положения 1205 откорректирует соответствующее калиброванное значение крайней точки HI_CAL, LO_CAL. Например, если вычисленное значение для POS_SIG 1210 превышает MAX, то передатчик положения 1205 обновляет значение HI_CAL так, чтобы оно соответствовало текущему значению PTV 170. Аналогично, если вычисленное значение для POS_SIG 1210 меньше MIN, то передатчик положения 1205 обновляет значение LO_CAL так, чтобы оно соответствовало текущему значению PTV 170. Путем обновления значений HI_CAL и LO_CAL каждый раз, когда вычисленное для POS_SIG 1210 значение находится за пределами диапазона [MIN, MAX], калибровка представленного передатчика положения 1205 с течением времени улучшается. Когда клапан 106 в действительности достигает полностью открытого на 100% или полностью закрытого (0%) положения, то соответствующее калибровочное значение HI_CAL или LO_CAL становится практически идеальным. В оптимальном варианте сигнал положения по обратной связи 170 фильтруется для снижения влияния шумов так, чтобы шумы не вносили и/или не вызывали ошибок в процесс калибровки.
Представленный на Фиг.12 передатчик положения 1205 может автоматически применять и/или активировать новые значения LO_CAL и HI_CAL по мере их вычисления, как описано в предыдущем параграфе, кроме того/или новые значения LO_CAL и/или HI_CAL могут записываться с тем, чтобы их активировать и/или применять только тогда, когда передатчик положения 1205 получит конкретную инструкцию и/или указание. Например, передатчик положения 1205 может посредством индикатора на дисплее 645 (Фиг.13) сообщать, что одно или несколько новых калибровочных значений LO_CAL, HI_CAL имеются в наличии для активации. Если с помощью, например, устройства (устройств) ввода 640 (Фиг.13) пользователь указывает, что нужно применить новые и/или обновленные калибровочные значения LO_CAL, HI_CAL, то передатчик положения 1205 начнет использовать активированные калибровочные значения LO_CAL, HI_CAL для того, чтобы вычислять последующие значения POS_SIG 1210.
На Фиг.13 в качестве примера проиллюстрирован способ воплощения представленного на Фиг.12 передатчика положения. Поскольку элементы передатчика положения 1205 на Фиг.13 идентичны описанным выше элементам представленного на Фиг.6 контроллера положения клапана, то описание этих идентичных элементов здесь не повторяется. Вместо этого идентичные элементы на Фиг.6 и Фиг.13 имеют идентичные числовые обозначения, и читатель, желающий получить полное описание таких элементов с идентичными номерами, может обратиться к описанию, приведенному выше по отношению к Фиг.6.
Для выполнения оценки, вычисления и обновления расчетных значений HI_CAL и LO_CAL представленный на Фиг.13 передатчик положения 1205 включает калибратор 1305. Для вычисления начальной пары расчетных значений HI_CAL и LO_CAL, исходя из единственного подаваемого извне значения положения РРР, представленный на Фиг.13 калибратор 1305 включает устройство расчета конечных точек 1310. Используя, например, математические выражения согласно Уравнениям (11) и (12), представленное на Фиг.13 устройство расчета конечных точек 1310 вычисляет начальные значения HI_CAL и LO_CAL.
Для обновления значений HI_CAL и LO_CAL в процессе работы представленного на Фиг.12 клапанного устройства в составе технологической линии, представленный на Фиг.13 калибратор 1305 включает корректировщик крайних точек 1315. Представленный на Фиг.13 корректировщик крайних точек 1315 обновляет значения HI_CAL и LO_CAL в процессе работы передатчика положения 1205 в линии. Если в процессе работы вычислено значение POS_SIG 1210, которое находится за пределами диапазона [MIN, MAX], то представленный корректировщик крайних точек 1315 корректирует соответствующее калиброванное значение крайней точки HI_CAL, LO_CAL, приводя его к текущему значению цифрового значения 607. Следует понимать, что представленный корректировщик крайних точек 1315 может в качестве дополнения или альтернативы применяться для вычисления и/или обновления HI_CAL и LO_CAL в том случае, когда клапан 106 специально вынуждают выполнить полный рабочий ход с целью калибровки.
Для того чтобы вычислить цифровое представление 1320 значения POS_SIG 1210, представленный на Фиг.13 передатчик положения 1205 включает определитель значения положения 1325. Представленный на Фиг.13 определитель значения положения 1325 вычисляет значение (значения) цифрового сигнала 1320 исходя из калибровочных значений HI_CAL и LO_CAL путем, например, применения математического выражения Уравнения (10).
Для передачи и/или подачи POS_SIG 1210 к контроллеру процесса 185 и/или блокирующему устройству 1215 процесса, представленный на Фиг.13 передатчик положения 1205 содержит передатчик или приемопередатчик 1330 любого типа. Представленный на Фиг.13 передатчик 1330 преобразует цифровое значение (значения) 1320 в аналоговый сигнал, например, в сигнал величиной 4-20 мА, с помощью цепи (цепей), устройства (устройств) и/или способов любого количества и/или любого типа. В качестве дополнения или альтернативы приемопередатчик 1330 может в цифровом и/или беспроводном режиме передавать сигнал 1210 в виде цифрового значения (значений) 1320.
На Фиг.13 представлен один способ воплощения представленного на Фиг.12 передатчика положения 1205, однако, один или несколько интерфейсов, структур данных, элементов, процессов и/или устройств, показанных на Фиг.13, можно комбинировать, делить, переставлять, исключать и/или воплощать любым другим способом. Кроме того, представленный интерфейс 605 датчика положения, представленный калибратор 1305, представленное устройство расчета крайних точек 1310, представленный корректировщик крайних точек 1315, представленный накопитель 630, представленный пользовательский интерфейс 635, представленное устройство (устройства) ввода 640, представленный дисплей 645, представленный определитель значения положения 1325, представленный передатчик/приемопередатчик 1330 и/или, в более общем смысле, весь передатчик положения 1205 по Фиг.13 можно воплотить с помощью материальной части, программного обеспечения, аппаратных средств и/или комбинации материальной части, программного обеспечения, аппаратных средств. Таким образом, например, любой представленный интерфейс 605 датчика положения, представленный калибратор 1305, представленное устройство расчета крайних точек 1310, представленный корректировщик крайних точек 1315, представленный накопитель 630, представленный пользовательский интерфейс 635, представленное устройство (устройства) ввода 640, представленный дисплей 645, представленный определитель значения положения 1325, представленный передатчик/приемопередатчик 1330 и/или, в более общем смысле, весь передатчик положения 1205 по Фиг.13 можно воплотить с помощью одной или нескольких цепи (цепей), программируемого процессора (процессоров), интегральной схемы (схем) специального назначения ИССН (ASIC), программируемого логического устройства (устройств) ПЛУ (PLD), программируемого пользователем логического устройства (устройств) ППЛУ (FPLD), программируемой пользователем логической матрицы (матриц) ППЛМ (FPGA) и т.п. Если в каком-либо пункте формулы настоящего изобретения, включающем один или несколько таких элементов, описано воплощение в виде чисто программного обеспечения и/или аппаратных средств, то тем самым отчетливо выражается, что, по меньшей мере, либо представленный интерфейс 605 датчика положения, либо представленный калибратор 1305, либо представленное устройство расчета крайних точек 1310, либо представленный корректировщик крайних точек 1315, либо представленный интерфейс 620 управляющего сигнала, либо представленный накопитель 630, либо представленный пользовательский интерфейс 635, либо представленное устройство (устройства) ввода 640, либо представленный дисплей 645, либо представленный определитель значения положения 1325, либо представленный передатчик/приемопередатчик 1330 и/или в более общем смысле, весь передатчик положения 1205 содержит материальный компьютерно-читаемый носитель. Примеры материальных компьютерно-читаемых носителей включают (не ограничиваясь) флэш-память, компакт-диск (CD), цифровой видеодиск (DVD), гибкий диск, постоянное запоминающее устройство ПЗУ (ROM), запоминающее устройство с произвольной выборкой ЗУПВ (RAM), программируемое ЗУПВ (PROM), электронно-программируемое ЗУПВ (EPROM), и/или электронно-перепрограммируемое ЗУПВ (EEPROM), оптический диск, оптическое запоминающее устройство, магнитный диск, магнитное запоминающее устройство и/или любой другой материальный накопитель, который может использоваться для хранения программного кода и/или инструкций в форме машиночитаемых инструкций или структур данных, и являющийся доступным для процессора, компьютера и/или другой машины, имеющей процессор такой, как представленная процессорная платформа Р100, которая будет описана ниже со ссылкой на Фиг.16. Комбинации вышеуказанного также входят в понятие материальных компьютерно-читаемых накопителей. Кроме того, представленный передатчик положения 1205 может включать интерфейсы, структуры данных, элементы, процессы и/или устройства, заменяющие или дополняющие те, которые представлены на Фиг.12, и/или может включать больше одного из показанных интерфейсов, структур данных, элементов, процессов и/или устройств, или любое из перечисленного, или все перечисленное.
На Фиг.14 представлен в качестве примера процесс, который может быть выполнен для установки представленного на Фиг.12 и 13 передатчика положения 1205. На Фиг.15 представлен в качестве примера процесс, который может быть выполнен для воплощения представленного на Фиг.13 калибратора 1305, и/или, в более общем смысле, представленного на Фиг.12 и 13 передатчика положения 1205. Процессор, контроллер и/или любое другое устройство обработки информации может быть использовано и/или запрограммировано для выполнения процессов, представленных на Фиг.14 и 15. Например, процессы по Фиг.14 и 15 можно воплотить в виде кодированных и/или доступных для машины инструкций, записанных в любом готовом изделии таком, как материальный компьютерно-читаемый накопитель, к которому может иметь доступ процессор, компьютер и/или другая машина, имеющая процессор, например, такой как процессорная платформа Р100, описанная ниже по отношению к Фиг.16. В альтернативном варианте некоторые или все операции, представленные на Фиг.14 и 15, могут быть воплощены с помощью любой комбинации (комбинаций) таких устройств, как ИССН (ASIC), ПЛУ (PLD), ППЛУ (FPLD), ППЛМ (FPGA), отдельная логика, материальная часть, аппаратные средства и т.п. Кроме того, одну или большее количество операций по Фиг.14 и 15 можно воплотить вручную или в комбинации с любой из упомянутых технологий, например, в любой комбинации аппаратных средств, программного обеспечения, отдельной логики и/или материальной части. Кроме того, для воплощения представленных на Фиг.14 и 15 операций можно применить многие другие способы. Например, можно изменить порядок выполнения блоков и/или один или несколько из описанных блоков можно изменить, исключить, поделить или скомбинировать. Кроме того, любой машинный процесс по Фиг.14 и 15 или все эти процессы можно выполнять последовательно и/или выполнять параллельно посредством, например, отдельных потоков обработки, процессоров, устройств, отдельной логики, схем и т.п.
Представленный на Фиг.14 процесс начинается с того, что оператор и/или наладчик фиксирует или блокирует (например, закрепляет вручную) в нужном положении клапанный узел 102 с помощью представленного держателя 190 (блок 705). Например, оператор может вручную зафиксировать клапан 106 с помощью зажимов и/или фиксаторов, или же может зафиксировать положение привода 108 путем предотвращения перемещения (например, путем отвода) управляющей текучей среды внутри привода 108.
Подлежащий замене датчик извлекают (блок 1410) и устанавливают заменяющий и/или новый передатчик 1205 (блок 1415). Наладчик активирует (например, подает питание) передатчик 1205 и получает доступ к пользовательскому интерфейсу 635 (блок 1420). Наладчик вводит данные конфигурации, например, такие, как значение чувствительности SENSITIVITY датчика положения 110 (например, считывая с ярлычка на датчике положения 110) (блок 1425). Затем наладчик вводит одноточечное значение РРР индикатора положения 140 (блок 1430). В некоторых вариантах значение РРР вводится в виде процентной доли от длины перемещения (например, открытое на 50%) привода 108.
Исходя из введенной информации передатчик положения 1205 вычисляет калибровочные значения LO_CAL и HI_CAL, а наладчик применяет эти значения (блок 1440).
Наладчик переводит передатчик положения 1205 в активное состояние (блок 1445) и разблокирует или освобождает из зафиксированного положения клапанный узел 102 (блок 1450).
Представленный на Фиг.15 процесс начинается с того, что представленный корректировщик крайних точек 1315 ждет, пока вычисленное значение POS_SIG 1210 выйдет за пределы диапазона [MIN, MAX] (блок 1505). Когда вычисленное значение POSJ3IG 1210 выйдет за пределы диапазона [MIN, MAX] (блок 1505), и должно быть автоматически применено улучшение калибровки (блок 1510), корректировщик крайних точек 1315 обновляет соответствующее калибровочное значение HI_CAL, LO_CAL, приводя его к текущему значению PTV 170 (блок 1515).
Если улучшение калибровки не применяется автоматически (блок 1510), то корректировщик крайних точек 1315 сообщает пользователю (например, через представленный дисплей 645), что новые и/или улучшенные калибровочные данные готовы к применению (блок 1520), и определяет, находится ли PTV 170 за пределами предыдущего диапазона значений NEW_CAL (блок 1525). Если PTV 170 находится за пределами предыдущего диапазона (блок 1525), то корректировщик крайних точек 1315 записывает обновленное калибровочное значение NEW_HI CAL, NEW_LO CAL для того, чтобы его можно было впоследствии извлечь и/или активировать (блок 1530). Затем управление возвращается к блоку 1505, чтобы ожидать пока значение POS_SIG 1210 выйдет за пределы диапазона [MIN, MAX].
На Фиг.16 представлена блок-схема процессорной платформы Р100, которую можно использовать и/или запрограммировать для воплощения любого из представленных устройств и/или способов калибровки описанных здесь контроллеров положения клапана. Для воплощения процессорной платформы Р100 можно применить, например, один или несколько процессоров общего назначения, процессорных ядер, микроконтроллеров и т.п.
Процессорная платформа Р100 по Фиг.16 включает, по меньшей мере, один программируемый процессор Р105. Процессор Р105 выполняет кодированные инструкции Р110 и/или Р112, находящиеся в основной памяти процессора Р105 (например, в RAM P115 и/или ROM P120). Процессор Р105 может быть устройством обработки любого типа, например, таким как процессорное ядро, процессор и/или микроконтроллер. Процессор Р105 может выполнять, среди прочего, представленные на Фиг.7-11, 14 процессы, и/или в более общем смысле, воплотить представленный на Фиг.1 и 6 контроллер положения клапана 104 и/или представленный на Фигурах 12 и 13 передатчик положения 1205.
Процессор Р105 по шине Р125 обменивается данными с материальными компьютерно-читаемыми накопителями любого типа (включая ROM P120 и/или RAM P115) и в любом количестве. RAM P115 можно воплотить с помощью динамического запоминающего устройства с произвольной выборкой ДЗУПВ (DRAM), синхронного динамического запоминающего устройства с произвольной выборкой СДЗУПВ (SDRAM) и/или с устройством ЗУПВ (RAM) любого другого типа, а ПЗУ (ROM) можно воплотить с помощью флэш-памяти и/или любого другого запоминающего устройства. Доступ к памяти P115 и P120 можно контролировать с помощью любого контроллера памяти (не показано). Представленные устройства памяти P115 и P120 можно использовать, например, для воплощения представленного на Фиг.6 и 13 накопителя 630.
Процессорная платформа Р100 также содержит интерфейсную схему Р130. Указанную интерфейсную схему Р130 можно создать с помощью любого типа стандарта интерфейса, например, интерфейса внешней памяти, последовательного порта, универсального ввода-вывода и т.п. К интерфейсной схеме Р130 подключены одно или несколько устройств ввода Р135 и устройств вывода Р140. Устройства ввода Р135 могут применяться для воплощения представленного устройства (устройств) ввода 640, а устройства вывода Р140 могут применяться для воплощения представленного на Фиг.6 и 13 дисплея 645.
Настоящее изобретение здесь описано на примерах конкретных способов, устройств и готовых изделий, однако, объем настоящего изобретения не ограничивается ими. Напротив, настоящее изобретение охватывает все способы, устройства и готовые изделия, отчетливо соответствующие пунктам прилагающейся формулы изобретения либо в явном виде, либо согласно доктрине эквивалентов.
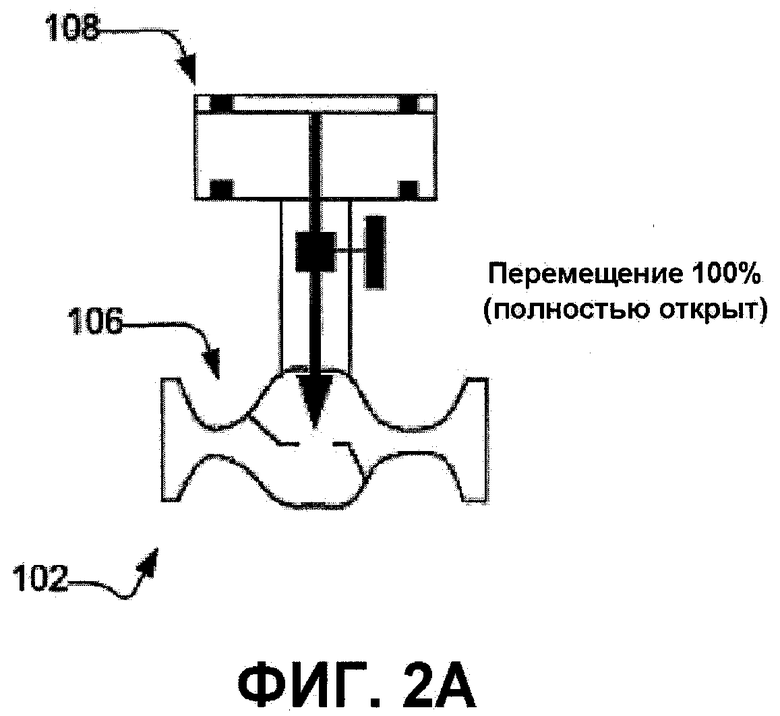
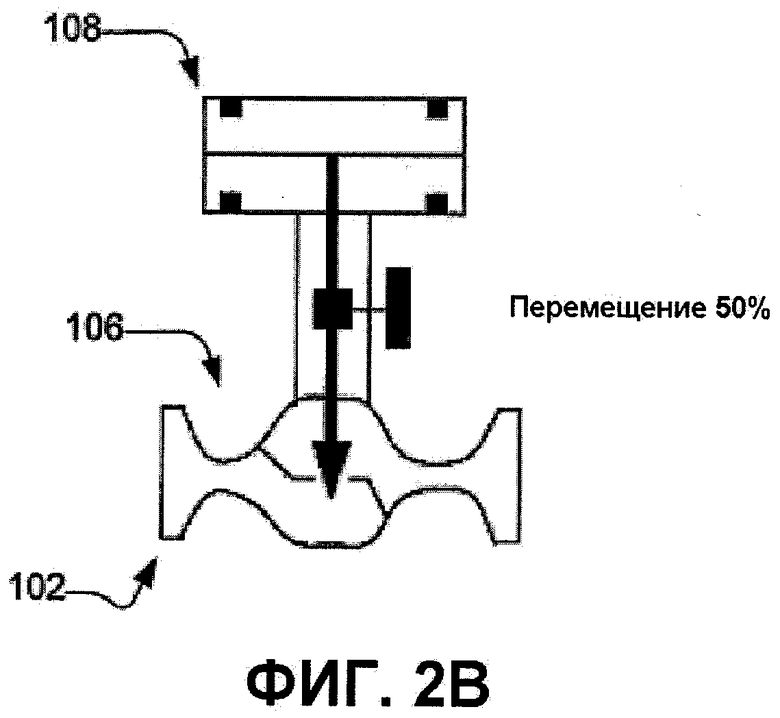
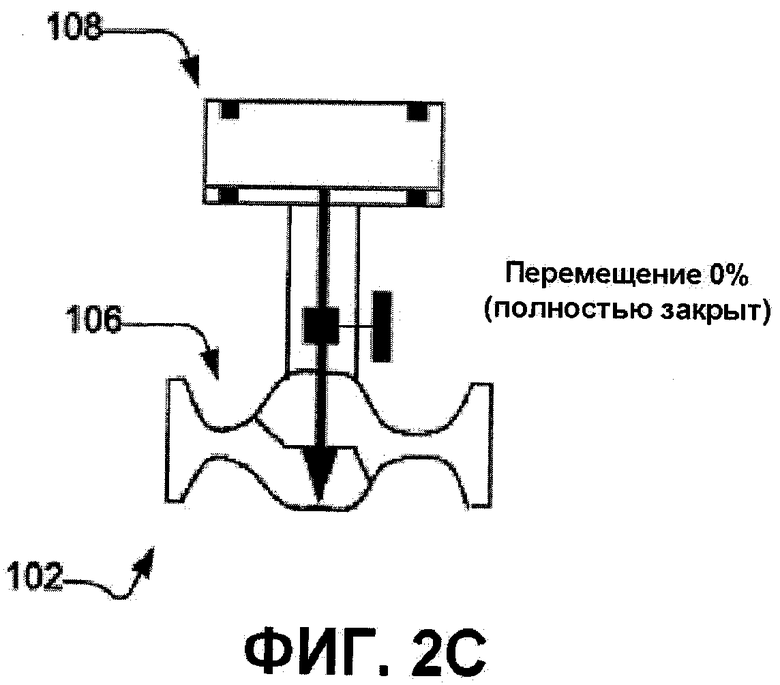
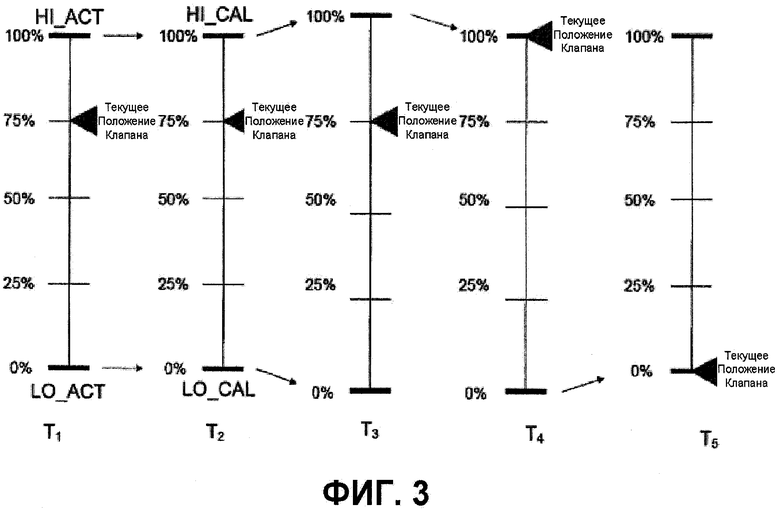
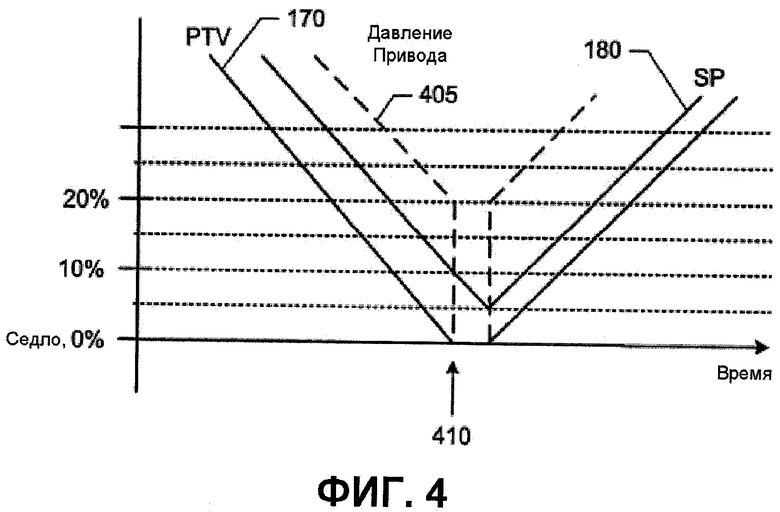
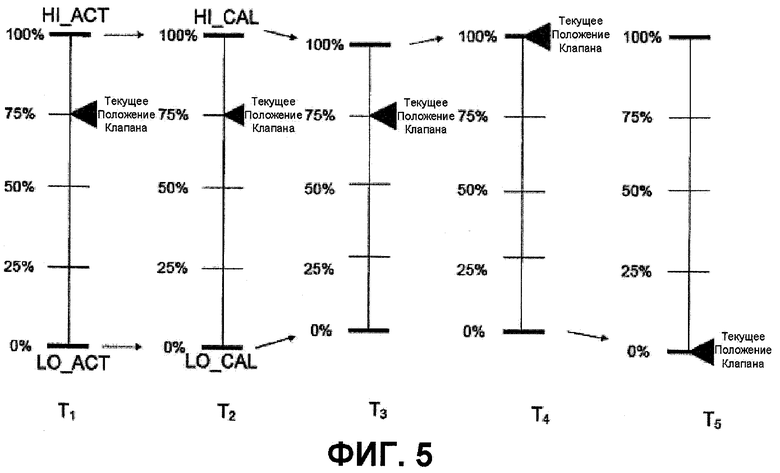
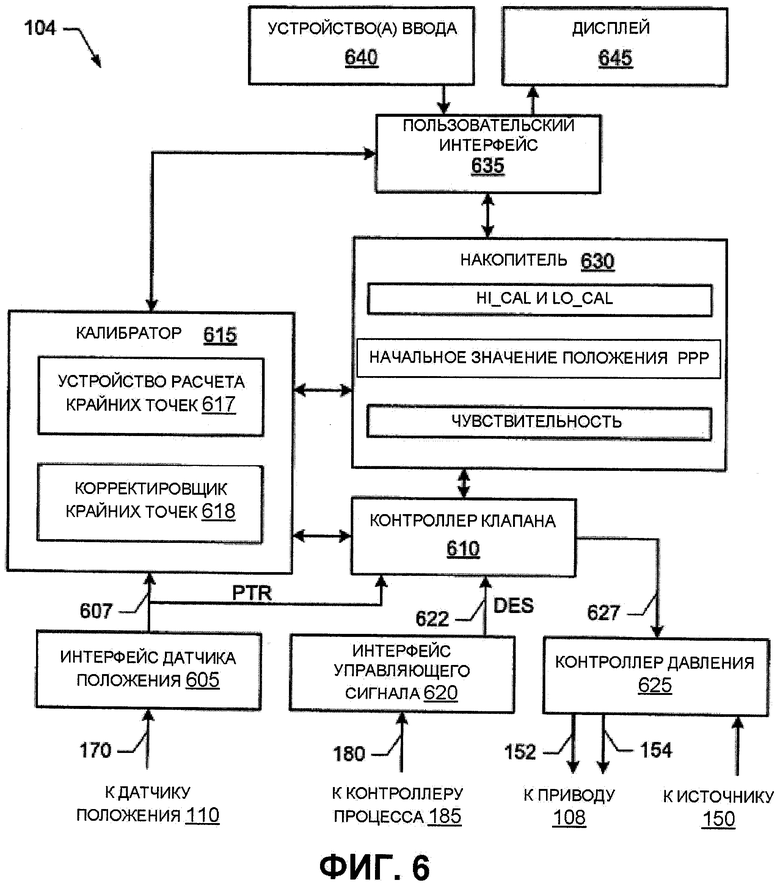
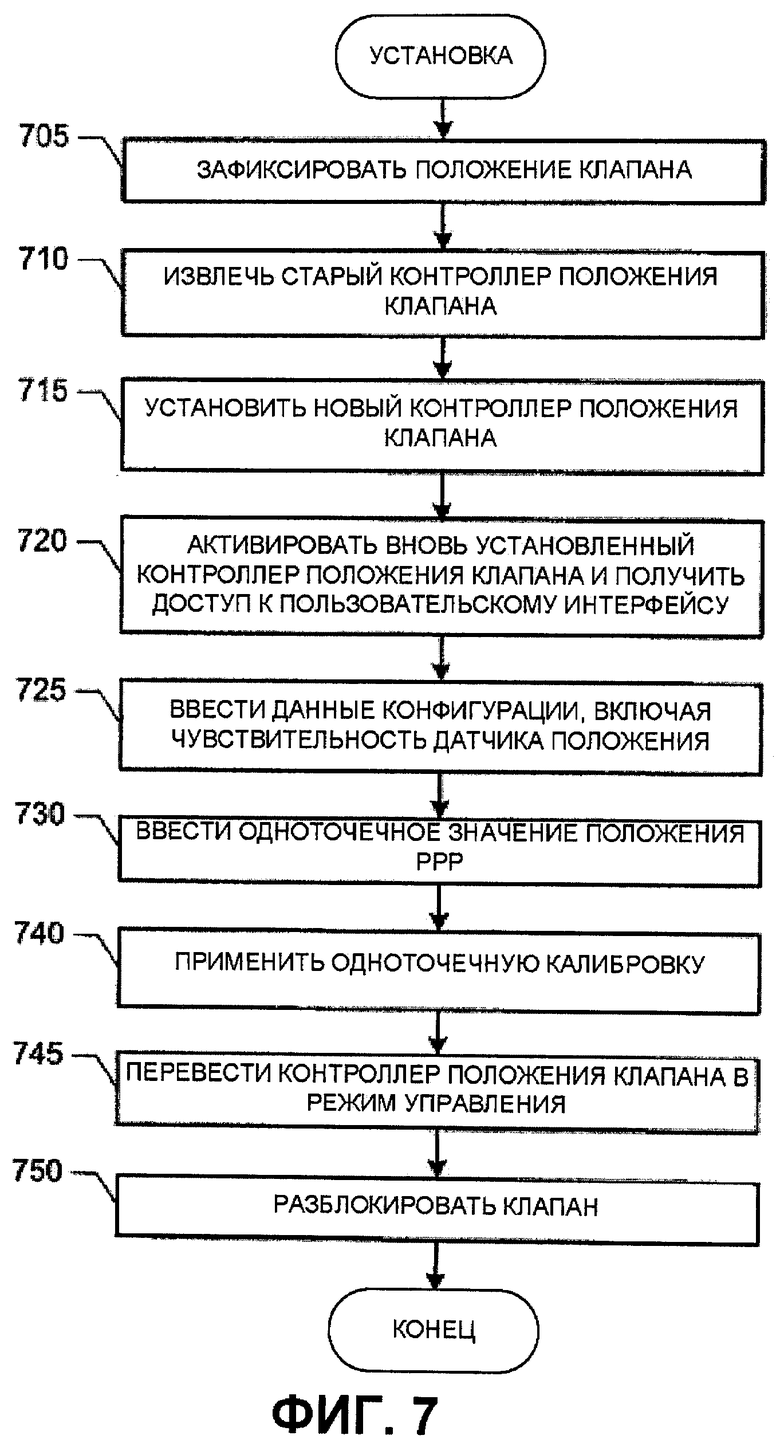
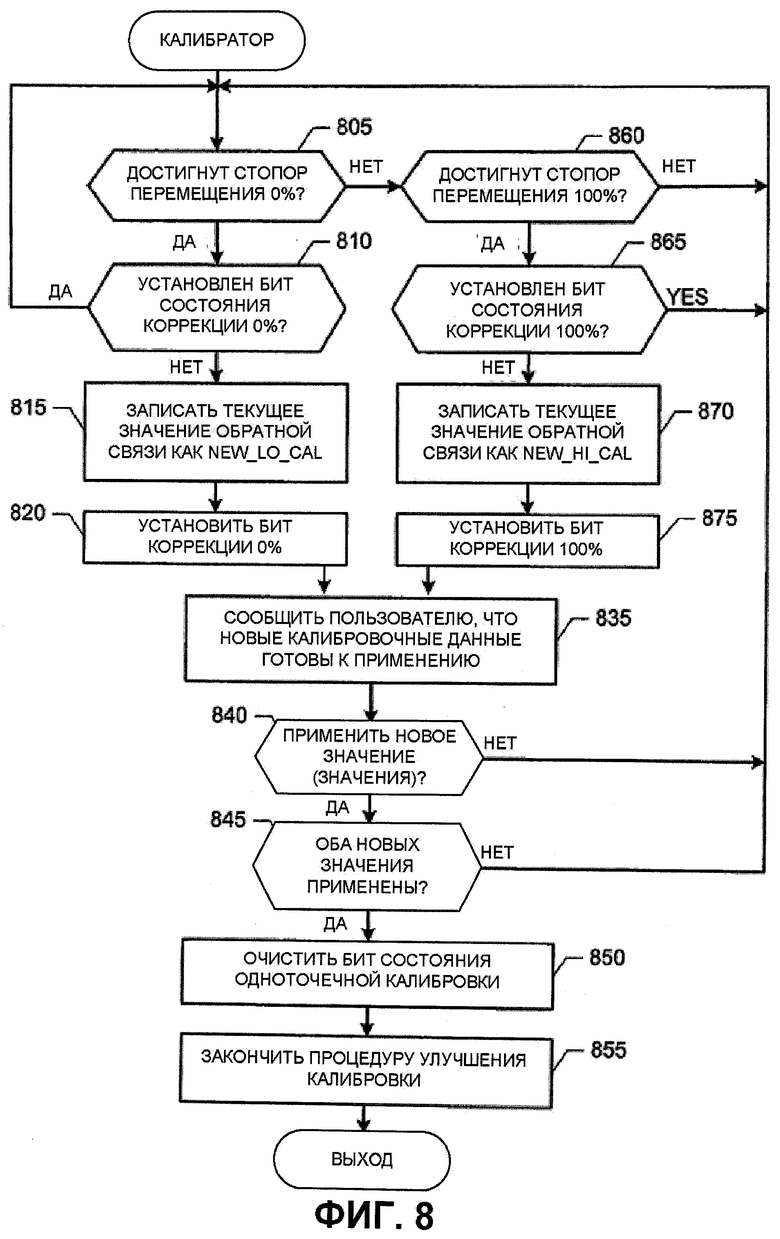
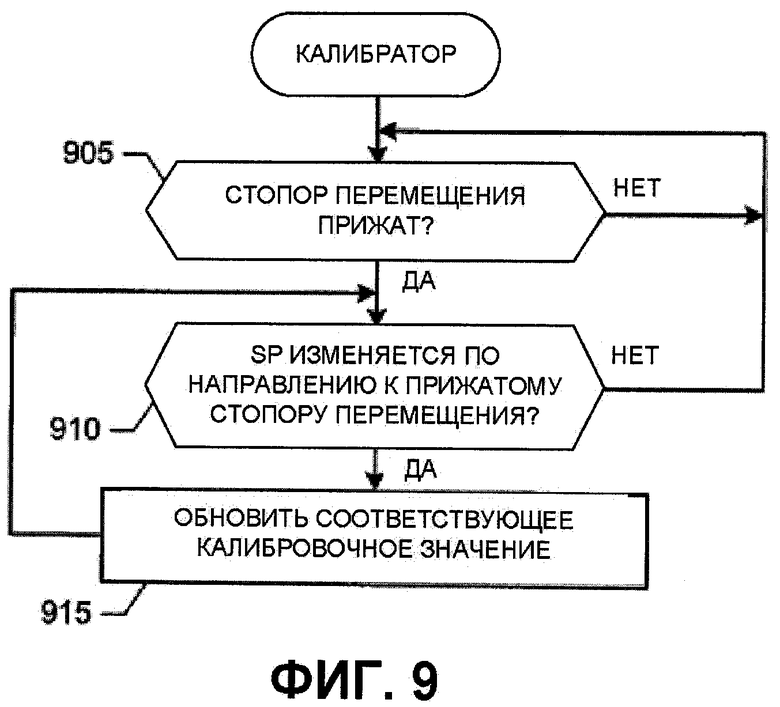
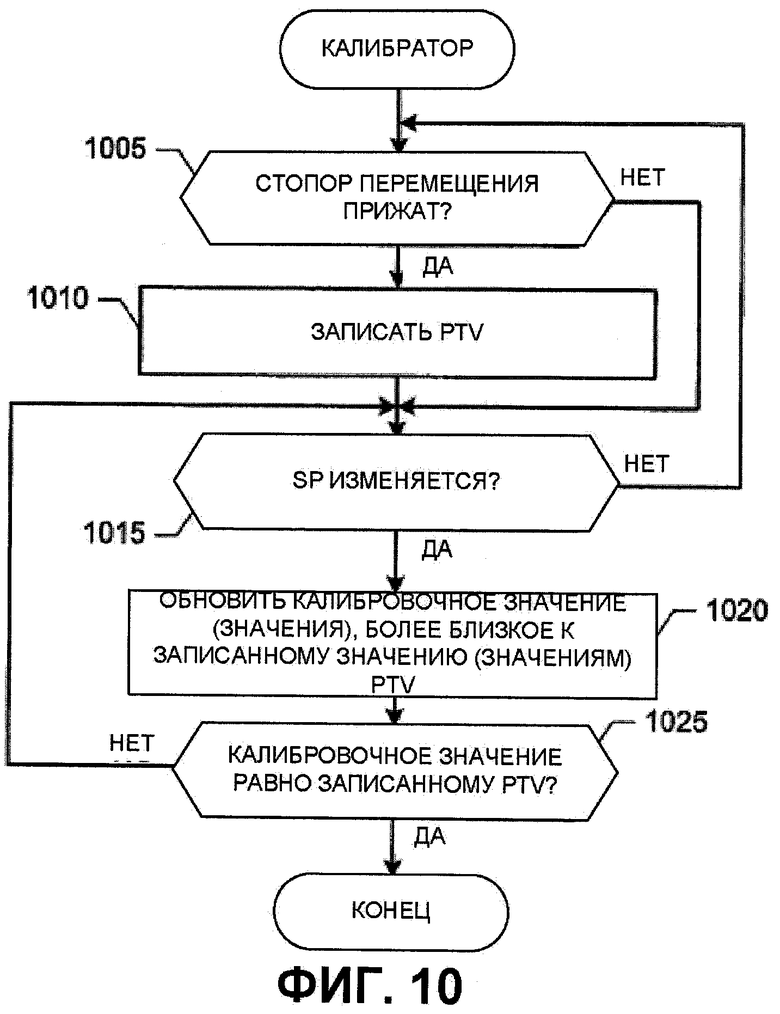
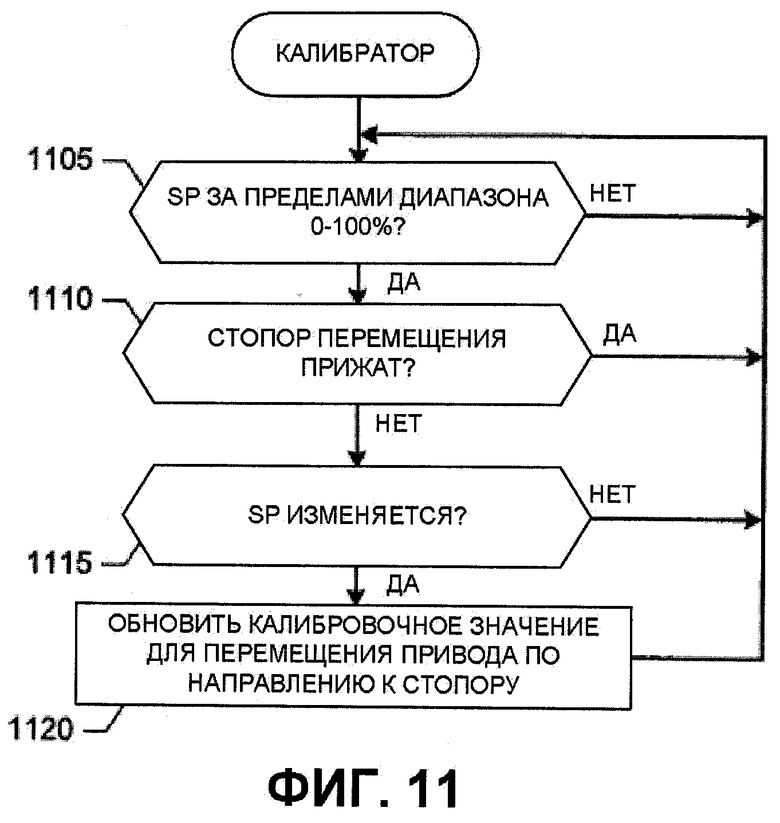
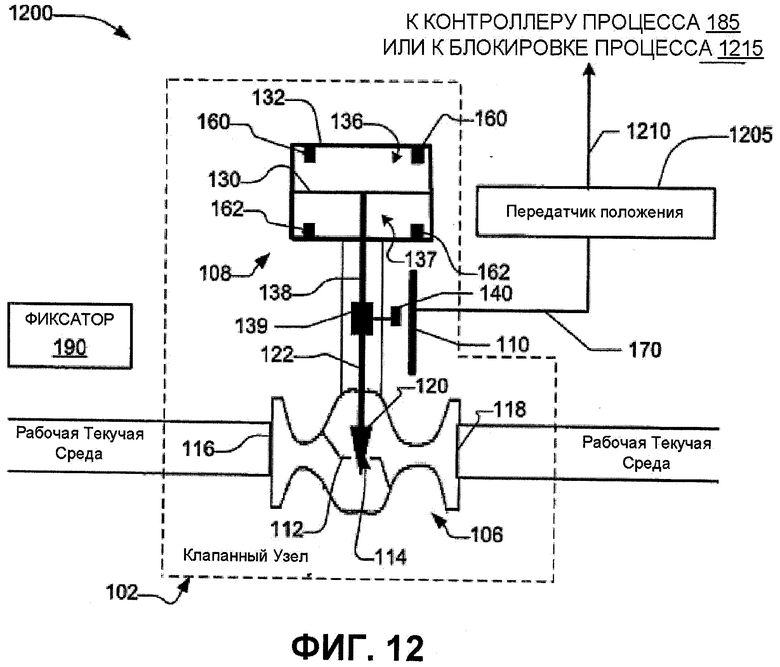
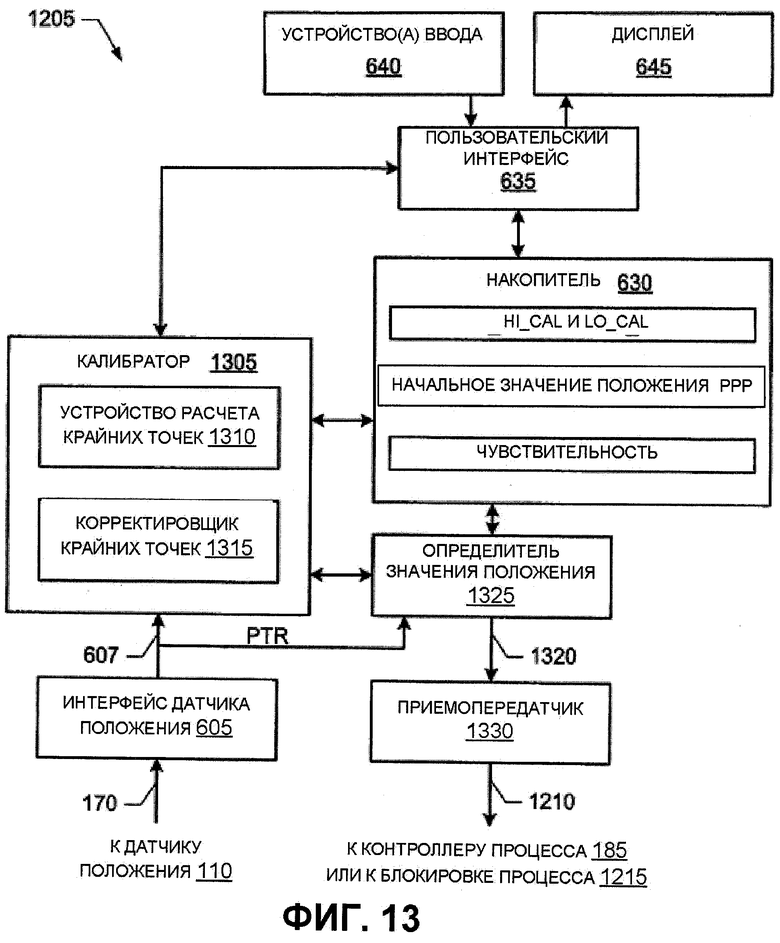

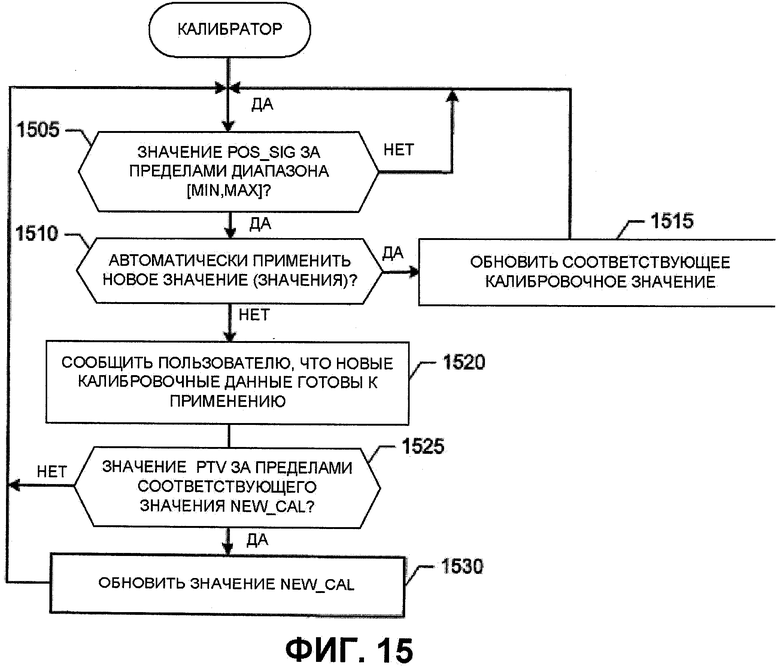
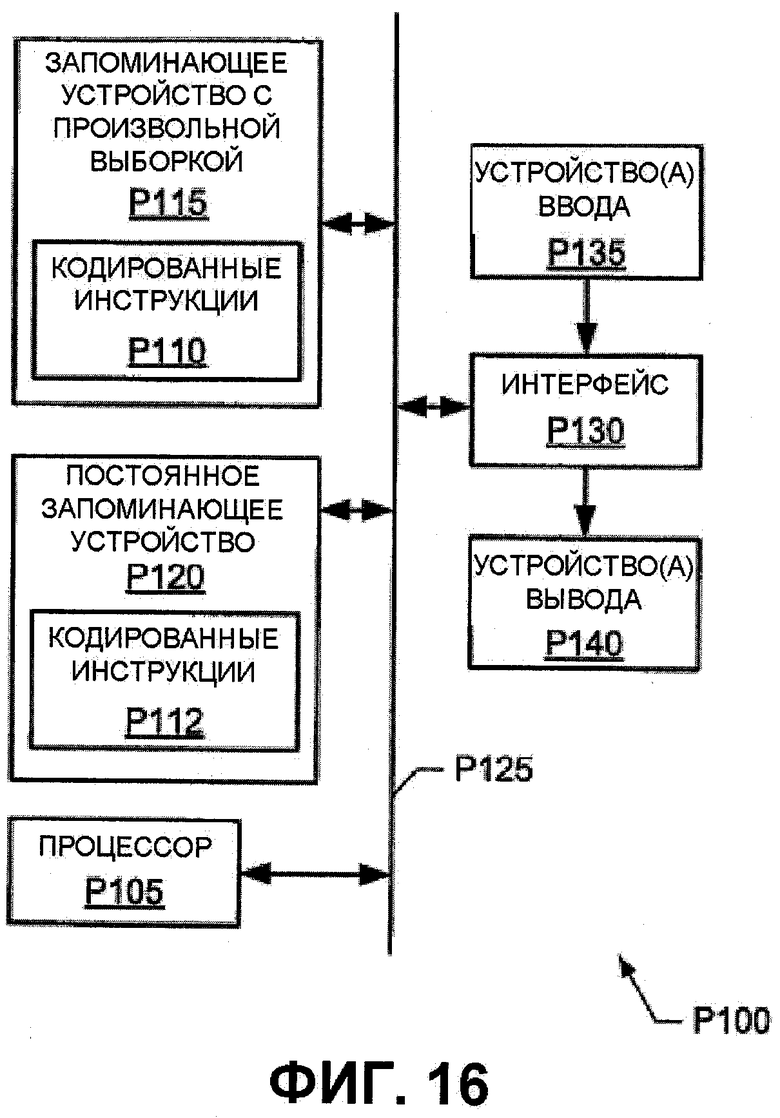
Настоящее изобретение в целом касается клапанов, в частности способов, устройств и готовых изделий, предназначенных для калибровки приборов, установленных на клапанах. Представленное устройство (100) для калибровки клапанного узла (102), включающего клапан (106), привод (108) и датчик давления (110), содержит интерфейс (104), предназначенный для приема значения положения клапана и для приема значения чувствительности датчика положения, а также устройство расчета крайних точек, предназначенное исходя из сигнала датчика положения, а также первого и второго значений, вычислять первое расчетное значение (HI_CAL), соответствующее ожидаемому полностью открытому положению клапана, а, кроме того, исходя из сигнала передатчика положения, а также первого и второго значений, вычислять второе расчетное значение (LO_CAL), соответствующее ожидаемому полностью закрытому положению клапана, при этом указанные первое и второе расчетные значения вычисляются без изменения положения клапана в период между вычислением первого и второго расчетных значений. 4 н. и 33 з.п. ф-лы, 18 ил.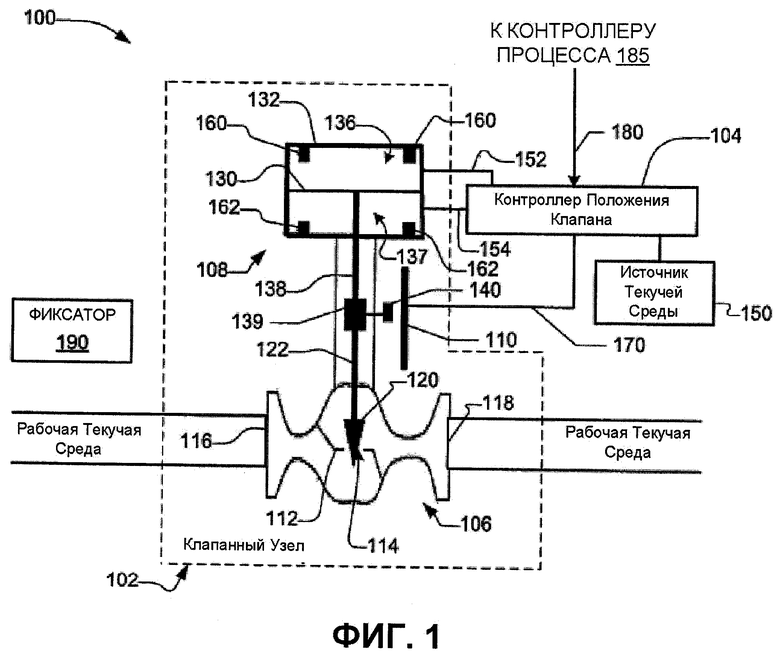
1. Устройство для калибровки клапанного узла, включающего клапан, привод и датчик положения, включающее:
интерфейс для приема первого значения, представляющего собой текущее положение клапана, и для приема второго значения, представляющего собой чувствительность датчика положения; и
устройство расчета крайних точек, предназначенное для вычисления первого расчетного значения сигнала положения, соответствующего ожидаемому полностью открытому положению клапана, исходя из сигнала положения и полученных первого и второго значений, а также для вычисления второго расчетного значения сигнала, соответствующего ожидаемому полностью закрытому положению клапана, исходя из сигнала положения и полученных первого и второго значений, при этом вычисление первого и второго расчетных значений выполняется без изменения положения клапана в период между вычислением указанных первого и второго расчетных значений.
2. Устройство по п.1, дополнительно включающее модуль управления клапаном, который предназначен реагировать на управляющий сигнал, представляющий желаемое положение клапана, управляя приводом с целью установки клапана практически в желаемое положение, исходя из первого и второго расчетных значений.
3. Устройство по п.2, отличающееся тем, что дополнительно включает корректировщик крайних точек, предназначенный обновлять первое расчетное значение для получения третьего расчетного значения тогда, когда привод достигает крайней точки перемещения, при этом модуль управления клапаном должен управлять приводом, исходя из второго и третьего расчетных значений, когда корректировщик крайних точек обновит первое расчетное значение.
4. Устройство по п.1, отличающееся тем, что дополнительно включает:
определитель значения положения, предназначенный вычислять значение положения, представляющее текущее положение клапана, исходя из первого и второго расчетных значений; и
передатчик для передачи вычисленного значения положения, по меньшей мере, либо к контроллеру процесса, либо к системе контроля, либо к устройству контроля, либо к системе автоматического отключения, либо к системе блокировки процесса.
5. Устройство по п.4, отличающееся тем, что дополнительно включает корректировщик крайних точек, предназначенный обновлять первое расчетное значение для получения третьего расчетного значения тогда, когда вычисленное значение положения выходит за пределы диапазона, и при этом определитель значения положения должен вычислять значение положения, представляющее текущее положение клапана, исходя из второго и третьего расчетных значений.
6. Устройство по п.1, отличающееся тем, что клапанный узел дополнительно содержит фиксатор положения, предназначенный для удержания клапана в текущем положении во время вычисления первого и второго расчетных значений устройством расчета крайних точек.
7. Устройство по п.1, отличающееся тем, что устройство расчета крайних точек должно вычислять первое расчетное значение для компенсации неточности первого полученного значения.
8. Устройство по п.1, отличающееся тем, что устройство расчета крайних точек должно вычислять первое расчетное значение так, чтобы оно представляло положение за пределами ожидаемого полностью открытого положения клапана.
9. Устройство по п.1, отличающееся тем, что устройство расчета крайних точек должно вычислять второе расчетное значение так, чтобы оно представляло положение клапана за пределами ожидаемого полностью открытого положения клапана.
10. Устройство по п.1, отличающееся тем, что дополнительно содержит корректировщик крайних точек, предназначенный обновлять первое расчетное значение для получения третьего расчетного значения тогда, когда привод достигает крайней точки перемещения, при этом модуль управления клапаном должен управлять приводом исходя из второго и третьего расчетных значений, когда корректировщик крайних точек обновит первое расчетное значение.
11. Устройство по п.1, отличающееся тем, что второе полученное значение представляет, по меньшей мере, либо изменение сигнала положения на единицу расстояния перемещения привода клапана, либо изменение сигнала положения за полный рабочий ход клапана.
12. Устройство по п.1, отличающееся тем, что дополнительно содержит:
дисплей, предназначенный показывать подсказку, требующую первого и второго значений;
устройство ввода, предназначенное для приема первого и второго значений.
13. Устройство по п.1, отличающееся тем, что текущее положение клапана определяют визуальным осмотром.
14. Устройство по п.1, отличающееся тем, что первое полученное значение представляет оценку текущего положения клапана.
15. Способ калибровки контроллера положения клапана, включающий:
получение сигнала положения, представляющего положения клапана;
получение первого значения, представляющего текущее положение клапана;
получение второго значения, представляющего чувствительность датчика положения;
вычисление первого расчетного значения сигнала положения, соответствующего ожидаемому полностью открытому положению клапана, исходя из полученного сигнала положения, а также первого и второго полученных значений;
вычисление второго расчетного значения сигнала положения, соответствующего ожидаемому полностью закрытому положению клапана, исходя из полученного сигнала положения, а также первого и второго полученных значений, при этом во время вычисления первого и второго расчетных значений текущее положение клапана зафиксировано; и
управление приводом клапана под воздействием управляющего сигнала, представляющего желаемое положение клапана, для установки клапана практически в желаемое положение, исходя из сигнала положения, а также первого и второго расчетных значений.
16. Способ по п.15, отличающийся тем, что первое расчетное значение вычисляют для компенсации неточности в первом значении.
17. Способ по п.15, отличающийся тем, что дополнительно включает вычисление первого расчетного значения для представления, по меньшей мере, либо положения клапана, находящегося за пределами ожидаемого полностью открытого положения клапана, либо положение, не достигающее ожидаемого полностью открытого положения клапана.
18. Способ по п.15, отличающийся тем, что дополнительно включает обновление первого расчетного значения для получения третьего расчетного значения, когда привод клапана достигает стопора перемещения, при этом управление приводом клапана осуществляется исходя из сигнала положения, а также третьего и второго расчетных значений после обновления первого расчетного значения.
19. Способ по п.18, отличающийся тем, что обновление первого расчетного значения для получения третьего расчетного значения выполняют путем:
вычисления разности между первым расчетным значением и действительным значением сигнала положения;
вычисления поправочного коэффициента на основе заданного положения клапана;
вычисления результата разности и поправочного коэффициента; и
вычитания этого результата из второго расчетного значения для получения третьего расчетного значения.
20. Способ по п.15, отличающийся тем, что дополнительно включает обновление первого расчетного значения для получения третьего расчетного значения, когда привод клапана достигает крайней точки перемещения, при этом управление клапаном осуществляется исходя из сигнала положения, а также второго и третьего расчетных значений после обновления первого расчетного значения.
21. Способ по п.15, отличающийся тем, что второе полученное значение представляет, по меньшей мере, либо изменение сигнала положения на единицу длины перемещения привода клапана, либо диапазон сигнала положения, соответствующий полному рабочему ходу клапана.
22. Способ по п.15, отличающийся тем, что текущее положение клапана определяют путем визуального осмотра.
23. Способ по п.15, отличающийся тем, что первое полученное значение представляет оценку текущего положения клапана.
24. Готовое промышленное изделие с записанными в нем машиночитаемыми инструкциями, под воздействием которых машина выполняет следующее:
получает сигнал положения, представляющий положение клапана;
получает первое значение, представляющее оценочное текущее положение клапана;
получает второе значение, представляющее чувствительность датчика положения;
вычисляет первое расчетное значение сигнала положения, соответствующее ожидаемому полностью открытому положению клапана, исходя из полученного сигнала положения, а также первого и второго полученных значений;
вычисляет второе расчетное значение сигнала положения, соответствующее ожидаемому полностью закрытому положению клапана, исходя из полученного сигнала положения, а также первого и второго полученных значений, при этом первое и второе расчетные значения вычисляются при фиксированном текущем положении клапана;
вычисляет третье значение, представляющее действительное положение клапана, исходя из сигнала положения, а также первого и второго расчетных значений; и
передает третье значение, по меньшей мере, либо к устройству управления процессом, либо к системе контроля, либо к устройству контроля, либо к системе автоматического отключения, либо к системе блокирования процесса.
25. Готовое промышленное изделие по п.24, отличающееся тем, что выполнение машиночитаемых инструкций вынуждает машину вычислять первое расчетное значение для компенсации неточности в первом полученном значении.
26. Готовое промышленное изделие по п.24, отличающееся тем, что выполнение машиночитаемых инструкций вынуждает машину вычислять первое расчетное значение для представления положения, находящегося ближе ожидаемого полностью открытого положения клапана.
27. Готовое промышленное изделие по п.24, отличающееся тем, что выполнение машиночитаемых инструкций вынуждает машину:
сравнивать вычисленные значения положения с диапазоном значений; и
в случае, если вычисленное значение положения находится за пределами диапазона значений, обновлять первое расчетное значение так, чтобы оно практически равнялось текущему значению сигнала положения.
28. Готовое промышленное изделие по п.24, отличающееся тем, что второе полученное значение представляет, по меньшей мере, либо изменение сигнала положения на единицу длины перемещения привода клапана, либо изменение сигнала положения за полный рабочий ход клапана.
29. Готовое промышленное изделие по п.24, отличающееся тем, что первое полученное значение представляет оценку текущего положения клапана.
30. Устройство для калибровки узла, включающего перемещаемый элемент, контроллер положения и датчик положения, включающее:
интерфейс для приема сигнала положения, представляющего положения перемещаемого элемента, для приема первого значения, представляющего текущее положение перемещаемого элемента, и для приема второго значения, представляющего чувствительность датчика положения; и
устройство расчета крайних точек, предназначенное для вычисления первого расчетного значения сигнала положения, соответствующего полностью открытому положению перемещаемого элемента, исходя из сигнала положения, первого и второго значений, а также для вычисления второго расчетного значения сигнала положения, соответствующего полностью закрытому положению перемещаемого элемента, исходя из сигнала положения и полученных первого и второго значений, при этом вычисление первого и второго расчетных значений выполняется без изменения положения перемещаемого элемента.
31. Устройство по п.30, отличающееся тем, что дополнительно включает модуль управления положением, предназначенный для того, чтобы под воздействием сигнала управления, представляющего желаемое положение перемещаемого элемента, управлять позиционирующим устройством с целью установки перемещаемого элемента практически в желаемое положение, исходя из сигнала положения, а также первого и второго расчетных значений.
32. Устройство по п.31, отличающееся тем, что дополнительно включает корректировщик крайних точек, предназначенный обновлять первое расчетное значение для получения третьего расчетного значения тогда, когда перемещаемый элемент достигает крайней точки перемещения, при этом модуль управления клапаном должен управлять приводом исходя из сигнала положения, а также второго и третьего расчетных значений, когда корректировщик крайних точек обновит первое расчетное значение.
33. Устройство по п.30, отличающееся тем, что дополнительно включает:
определитель значения положения, предназначенный вычислять значение положения, представляющее текущее положение клапана, исходя из первого и второго расчетных значений; и
передатчик для передачи вычисленного значения положения, по меньшей мере, либо к контроллеру процесса, либо к устройству контроля, либо к системе автоматического отключения, либо к системе блокировки процесса.
34. Устройство по п.30, отличающееся тем, что дополнительно включает фиксатор положения, предназначенный для удержания перемещаемого элемента в текущем положении на время вычисления первого и второго расчетных значений устройством оценки крайних точек.
35. Устройство по п.30, отличающееся тем, что второе полученное значение представляет, по меньшей мере, либо изменение сигнала положения на единицу длины перемещения привода клапана, либо изменение сигнала положения за полный рабочий ход перемещаемого элемента.
36. Устройство по п.30, отличающееся тем, что оно дополнительно включает:
дисплей, предназначенный показывать подсказку, требующую первого и второго значений; и
устройство ввода, предназначенное для приема первого и второго значений.
37. Устройство по п.30, отличающееся тем, что текущее положение клапана определяется путем визуального осмотра.
| US 6358327 B1, 19.03.2002 | |||
| US 5711507 A, 27.01.1998 | |||
| US 5197328 A, 30.03.1993 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЗАПОРНОЙ АРМАТУРЫ | 2006 |
|
RU2314450C1 |
| Датчик положения затвора клапана | 1974 |
|
SU513205A1 |

