Изобретение относится к способам угловой торпедной стрельбы с надводных кораблей (НК) и подводных лодок (ПЛ).
С момента появления торпед большое внимание уделялось совершенствованию приборов управления движением торпед на траектории, а также способов стрельбы торпедами, обеспечивающих точность стрельбы и ее эффективность. Известно, что торпеда, как и любой другой снаряд, осуществляет движение в горизонтальной и вертикальной плоскостях. В горизонтальной плоскости управление торпедой осуществляют посредством использования гироскопических приборов. Именно они отвечают за курсовую точность хода торпеды, осуществление поворотов и траекторий различной степени сложности [1, с.207-208].
При стрельбе торпедами из поворотных торпедных аппаратов при наличии ограничений на их разворот, а также при выполнении торпедной стрельбы НК (ПЛ) с торпедными аппаратами, зафиксированными в одном положении, возможность выполнения стрельбы на произвольном курсе корабля обеспечивается приборами курса с механизмами угловой установки хода торпед «с углом ω» - послестартового разворота. При этом НК (ПЛ) могут производить стрельбу торпедой при расположении цели на своих курсовых углах от 0 до 170° любого борта. После выстрела, по прошествии нескольких десятков метров, торпеда поворачивает на заданный угол ω в направлении, совпадающем с направлением отсчета курсового угла НК (ПЛ), и следует далее к цели прямолинейно под управлением гироскопического прибора курса (прибора маневрирования) [1, с.208] в назначенную (расчетную, упрежденную) точку.
Так, например, прибор курса (маневрирования) советской торпеды 53-56В [2] представлял собой гироскопический автомат, предназначенный для управления движением торпеды в горизонтальной плоскости по заданным траекториям. Прибор курса обеспечивал управление торпедой при стрельбе напрямую и под углом послестартового разворота ω вправо и влево от 0 до 170° (гироскопический угол курса) к оси торпедного аппарата, а также по сложным кривым маневрирования [2, с.126]. Механизм маневрирования предназначался для обеспечения движения торпеды по сложным траекториям. Он обеспечивал по прохождении прямого пути торпеды переключение хода торпеды на движение по короткому или длинному зигзагу, а также изменение направления и скорости распространения зигзага [2].
Дальнейшее совершенствование приборов управления торпед предполагает оснащение торпед бортовыми системами управления (БСУ) с процессорами, имеющими высокую производительность и быстродействие, а также улучшенное программное обеспечение. После выхода торпеды из торпедного аппарата БСУ осуществляет программно-управляемые движения торпеды по траектории с параметрами, заданными перед выстрелом [3, с.59].
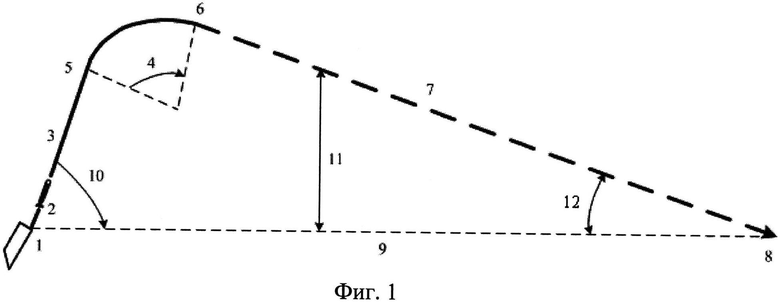
Способ угловой торпедной стрельбы, рассматриваемый в качестве прототипа и аналога, заключается в следующем (фиг. 1). После выстрела из торпедного аппарата корабля 1 торпеда 2 проходит конструктивный прямолинейный отрезок пути 3, длина которого определяется типом торпеды, после чего производят разворот торпеды на угол ω (внутренний угол 4 треугольника) гироскопического прибора между точками 5 и 6 в направлении, совпадающем с направлением отсчета курсового угла НК (ПЛ), а по окончании разворота торпеду переводят в режим прямолинейного движения по траектории 7 в назначенную (расчетную, упрежденную) точку прицеливания 8. При таком способе послестартового разворота на всем пути торпеда имеет относительно заданного направления движения 9 в назначенную (расчетную, упрежденную) точку прицеливания 8 линейное смещение 11. Оценки показывают, что величина линейного смещения, которое включает в себя проекции прямолинейного отрезка пути 3 и циркуляционной кривой 5-6, может достигать сотен метров. Наличие линейного смещения относительно прогнозируемого направления на цель является негативным фактором, отрицательно влияющим на эффективность стрельбы при дистанции до цели, известной приближенно.
Определяющим признаком данного способа стрельбы является послестартовый разворот торпеды на угол ω, выполняемый с одной перекладкой руля после выхода торпеды 2 из торпедного аппарата и прохождения конструктивного прямолинейного отрезка 3, и последующее прямолинейное движение торпеды в назначенную (расчетную, упрежденную) точку в соответствии с программой движения торпеды.
Установочные данные стрельбы рассчитывают в счетно-решающих приборах (СРП) приборов управления стрельбой (ПУС) корабля или в боевой информационной системе (БИУС) ПЛ в соответствии со следующими выражениями:
1) угол послестартового разворота торпеды со (внутренний угол 4 треугольника, показанного на фиг.1) в направлении, совпадающем с направлением отсчета курсового угла НК (ПЛ), описывается в неявном виде уравнением:

корень которого определяется методом последовательных приближений по формуле:

в качестве начального приближения принимается величина

где qк - курсовой угол корабля на точку прицеливания (внутренний угол 10 треугольника, показанного на фиг. 1).
Итоговое значение угла гироскопического прибора ω отличается от курсового угла qк на величину угла β (внутренний угол 12 треугольника, показанного на фиг. 1, при вершине 8):

Смысл решения уравнения (2) состоит в вычислении результата по формуле (4).
Недостатком рассмотренного способа угловой торпедной стрельбы является следующее. Так как торпеда проходит вперед по курсу ПЛ (корабля) некоторый конструктивный прямолинейный участок 3, то для следования в расчетную (упрежденную) точку 8 она должна двигаться по прямой 7, пересекающейся с прямой 9 под углом β (внутренний угол 12 треугольника при вершине 8) [4, с.51]. Траектория торпеды 7 из точки 6 в точку 8 имеет линейное смещение 11 относительно направления 9 в назначенную (расчетную, упрежденную) точку прицеливания 8 цели, которое включает проекции участка 3 и радиуса циркуляции торпеды при послестартовом развороте, и может составлять десятки и сотни метров.
Целью изобретения является разработка способа угловой торпедной стрельбы с коордонатом, исключающего линейное смещение траектории торпеды от линии прогнозируемого направления на цель.
Коордонатом называется маневр, формируемый последовательным изменением курса корабля сначала в одну, а затем - в противоположную сторону [5, с.196]. Применительно к стрельбе торпедами коордонат не применяется.
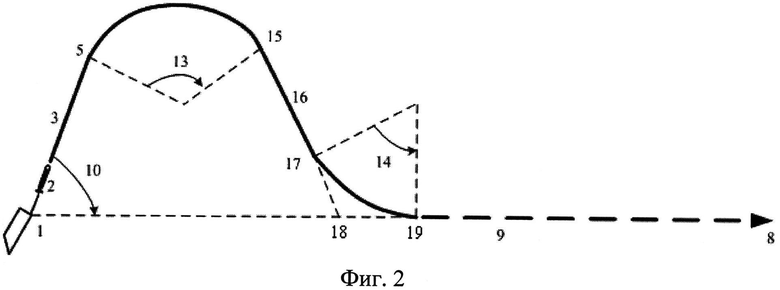
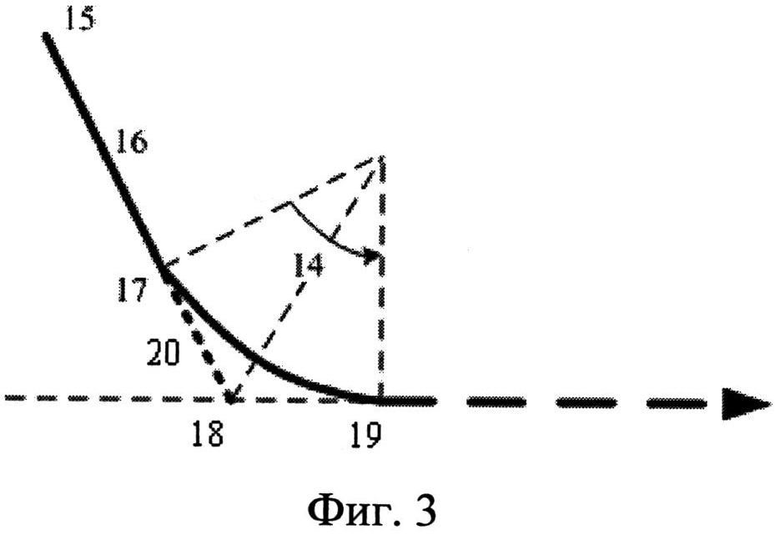
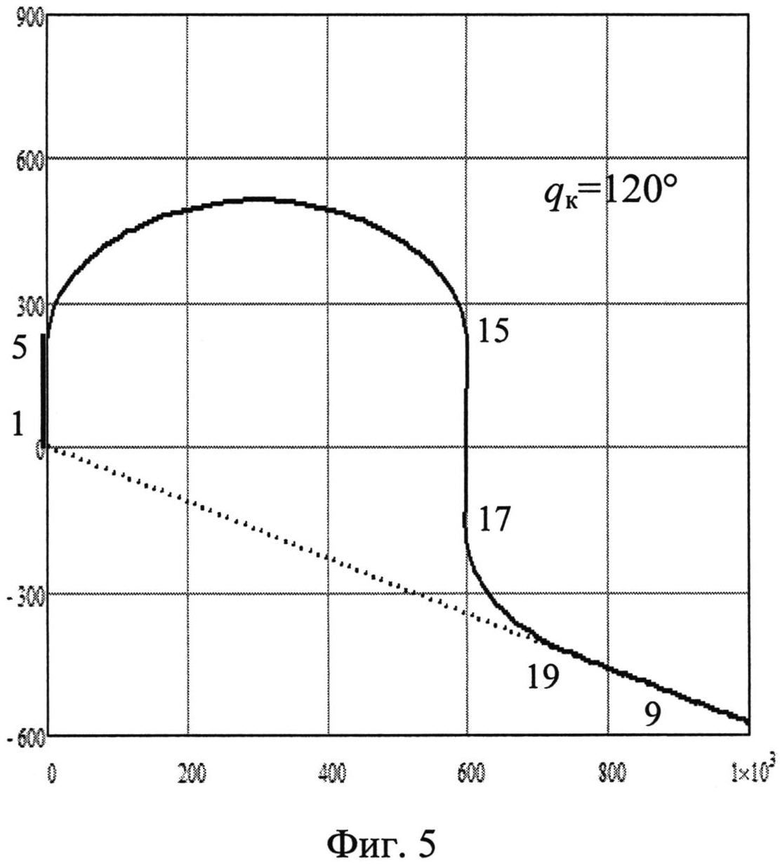
Поставленная цель достигается благодаря тому, что в отличие от способа угловой торпедной стрельбы, включающего определение (расчет) координат назначенной (расчетной, упрежденной) точки прицеливания, выработку по исходной информации в ПУС ПК или в БИУС ПЛ установочных данных стрельбы для движения торпеды в назначенную (расчетную, упрежденную) точку, ввод их в гироскопический прибор курса торпеды в качестве программы ее движения, выстреливание торпеды и осуществление ее движения по программной траектории, включающей конструктивный прямолинейный участок 3 и послестартовый разворот торпеды, осуществляют поворот не с одной, а с двумя перекладками руля 13 и 14 (фиг. 2), и совершают маневр коордоната, состоящий в последовательном движении торпеды сначала по дуге первой циркуляции 5-15 с углом циркуляции 13 в направлении, совпадающем с направлением отсчета курсового угла НК (ПЛ), затем прямолинейном движении торпеды вдоль отрезка 16 длиной, равной длине конструктивного отрезка траектории 3, уменьшенной на расстояние 20 (фиг. 3) между точками 17 и 18, развороте торпеды по дуге второй циркуляции 17-19 с углом циркуляции 14 в противоположном направлении с последующим выходом торпеды на линию прогнозируемого направления с корабля на цель в момент выполнения стрельбы и движением в назначенную (расчетную, упрежденную) точку прицеливания 8, причем величина 20 расстояния 17-18 рассчитывается из условия обеспечения сопряжения отрезка 16 с линией 9 направления в назначенную (расчетную, упрежденную) точку прицеливания 8.
Установочные данные стрельбы рассчитывают в ПУС НК или БИУС ПЛ в соответствии со следующими выражениями (фиг.2, 3):
1) угол первого поворота торпеды ω1 (внутренний угол 13 треугольника, показанного на фиг. 2) в направлении, совпадающем с направлением отсчета курсового угла НК (ПЛ):

2) отрезок Δе прямолинейного пути 20 торпеды между точками 17 и 18 до начала второй циркуляции (фиг.2, 3):

где а - длина конструктивного прямолинейного участка 3, Rт - радиус циркуляции торпеды 21 (фиг. 3);
3) угол второго поворота торпеды ω2 (внутренний угол 14 треугольника, показанного на фиг. 2) в противоположном направлении:

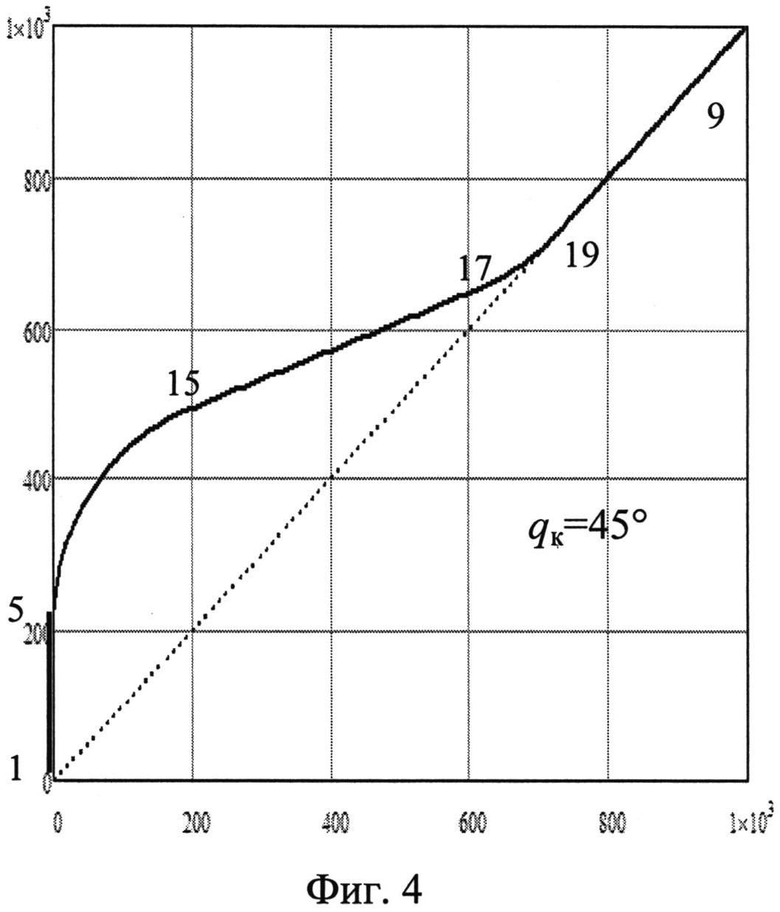
Достоверность практической реализуемости цели изобретения подтверждается расчетными графиками траектории торпеды, представленными на фиг. 4 и 5 для курсовых углов НК (ПЛ) qк=45° и qк=120°.
О соответствии предложенного технического решения критерию «существенные отличия» свидетельствуют сведения, приведенные в табл.1.
Предложенное техническое решение соответствует критерию «существенные отличия», так как ни один из отличительных признаков в известном устройстве не обнаружен.
Достижение положительного эффекта при осуществлении предложенного устройства подтверждается сведениями, приведенными в табл.2.
Реализация способа угловой торпедной стрельбы с коордонатом осуществляется следующим образом.
Алгоритм решения задачи формирования послестартового коордоната, обеспечивающего вывод торпеды на заданное направление в точку прицеливания, состоит в следующем (фиг. 2): после выстрела с корабля торпеда 2 проходит некоторый конструктивный прямолинейный отрезок 3, после чего в точке 5 производят послестартовый разворот на угол 13, равный 1,5 qк, в направлении, совпадающем с направлением отсчета курсового угла НК (ПЛ); по окончании разворота осуществляют прямолинейное движение торпеды 16 расчетной длины, после чего выполняют новый поворот в противоположную сторону на угол 14, равный - 0,5 qк, с выходом торпеды на азимутальный курс: 1,5 qк-0,5 qк=qк, то есть вдоль линии 9 прогнозируемого направления на цель 8 (фиг. 2 и 3).
Источники информации
1. Морозов М.Э, Кулагин К.Л. Советский подводный флот 1922-1945 гг.: О подводных лодках и подводниках. - М.: ACT, 2006. - 877 с. http://www.booksshare.net/index.php?id1=4&category=history&author=morozov-me&book-2006&page=79
2. Торпеда 53-56В. Описание. Издание 2-е стереотипное. - М.: Воениздат, 1983. - 140 с.
3. Коптев Б.А., Гусев А.Л. Тенденции развития зарубежного торпедного оружия // Морская радиоэлектроника, №3 (17), 2006, с.58-63.
4. Колпаков Л.А. и др. Основы теории эффективности противолодочного и торпедного оружия. - СПб.: ВМИ, 2006. - 112 с.
5. Военно-морской словарь / Гл. ред. В.Н. Чернавин. - М.: Воениздат, 1989. - 511 с.
6. Скворцов М.И. и др. Основы маневрирования кораблей / М.И. Скворцов, И.В. Юхов, Б.И. Землянов, В.А. Абчук, О.А. Мрыкин. - М.: 1966, Воениздат МО. - 268 с.
7. Теоретические основы торпедного оружия: учебник для слушателей академии / Г.М. Подобрий, В.А. Халимонов, А.И. Носов, В.П. Белобородый. - Л.: Военно-морская академия, 1972. - 453 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для поражения торпедами надводной цели | 2022 |
|
RU2831207C2 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ (ВАРИАНТЫ) | 2011 |
|
RU2513366C2 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ТОРПЕДАМИ | 2019 |
|
RU2733734C2 |
| СПОСОБ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ ОТ ТОРПЕДЫ ШИРОКОПОЛОСНОЙ МИНЫ-ТОРПЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2283793C1 |
| Способ наведения торпеды, управляемой по проводам | 2018 |
|
RU2694792C1 |
| СПОСОБ НАВЕДЕНИЯ ТОРПЕДЫ, УПРАВЛЯЕМОЙ ПО ПРОВОДАМ | 2016 |
|
RU2631227C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ТОРПЕДОЙ | 2019 |
|
RU2736660C2 |
| СПОСОБ ПРИМЕНЕНИЯ МИНЫ | 2014 |
|
RU2562008C1 |
| СПОСОБ СТРЕЛЬБЫ С ПАЛУБНОЙ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОЛОДОЧНОГО РАКЕТНОГО КОМПЛЕКСА | 1995 |
|
RU2093783C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ | 2017 |
|
RU2692332C2 |
Изобретение относится к военной технике и может быть использовано в угловой торпедной стрельбе. Обнаруживают на надводном корабле (НК) или подводной лодке (ПЛ) морскую цель, определяют координаты назначенной точки прицеливания, вырабатывают по исходной информации в НК или ПЛ установочные данные стрельбы для движения торпеды в назначенную точку, вводят данные в гироскопический прибор курса торпеды в качестве программы ее движения, выстреливают торпеду, осуществляют движение торпеды по программной траектории с конструктивным прямолинейным участком и послестартовым разворотом торпеды с двумя перекладками руля и маневром коордоната с последовательным описыванием двух дуг циркуляции в противоположных направлениях отсчета курсового угла НК или ПЛ. Изобретение позволяет исключить линейное смещение траектории торпеды от линии прогнозируемого направления на цель. 5 ил. 2 табл.
Способ угловой торпедной стрельбы, включающий обнаружение на надводном корабле (НК) или подводной лодке (ПЛ) морской цели, определение (расчет) координат назначенной (расчетной, упрежденной) точки прицеливания, выработку по исходной информации в приборах управления стрельбой НК или в боевой информационно-управляющей системе ПЛ установочных данных стрельбы для движения торпеды в назначенную (расчетную, упрежденную) точку, ввод их в гироскопический прибор курса торпеды в качестве программы ее движения, выстреливание торпеды и осуществление ее движения по программной траектории, включающей конструктивный прямолинейный участок и послестартовый разворот торпеды в направлении отсчета курсового угла НК или ПЛ, отличающийся тем, что поворот торпеды осуществляют не с одной, а с двумя перекладками руля и совершают маневр коордоната, последовательно описывая две дуги циркуляции, первую - в направлении, совпадающем с направлением отсчета курсового угла НК или ПЛ, вторую - в противоположном направлении, для плавного выхода торпеды на линию прогнозируемого направления с корабля в назначенную (расчетную, упрежденную) точку прицеливания в момент выполнения стрельбы.
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ (ВАРИАНТЫ) | 2011 |
|
RU2513366C2 |
| Керосиновая и т.п. лампа с приспособлением для автоматического гашения ее при падении | 1928 |
|
SU20055A1 |
| US 6651004 B1, 18.11.2003 | |||
| US 20130088936 A1, 11.04.2013. | |||

