Изобретение относится к области военной техники и может быть использовано в системах наведения телеуправляемого торпедного оружия.
Современные торпеды имеют системы самонаведения (ССН), обладающие ограниченными возможностями по обнаружению и захвату цели. При пуске торпеды с дистанции до цели, превышающей дальность действия ССН, торпеда требует управления для более эффективного ее использования. Торпеды, управляемые на участке траектории движения к цели до захвата цели ССН, называют телеуправляемыми [1, 2]. Телеуправление современных торпед, отечественных и зарубежных, выполняют с использованием линии проводной связи [2].
В общем случае телеуправление состоит в одновременном контроле координат цели и объекта, который наводится на цель, и динамическом формировании траектории движения наводимого объекта. Так, при управлении ракетой [3] координаты цели и ракеты (направления, дистанции), получаемые с помощью РЛС, позволяют формировать траекторию наведения ракеты путем совмещения направлений (по пеленгу и углу места) на цель и ракету. При управлении торпедой [4] совмещение пеленгов на торпеду и цель приводит к потере контакта с целью ввиду «экранирования» слабого сигнала цели сильным сигналом торпеды, расположенной ближе к носителю. Потеря контакта с целью не позволяет управлять торпедой.
Известен способ телеуправляемого наведения торпеды по проводам [5]. Носителем системы управления является движущаяся ПЛ, а целью - движущийся объект: надводный корабль (НК) или ПЛ. На носителе системы управления имеются гидроакустические средства, которые могут измерять в режиме шумопеленгования текущие направления (пеленги) на цель и торпеду. Способ состоит в том, что траектория наведения торпеды формируется путем совмещения положения торпеды с линией, отстоящей на угол ϕ от текущего пеленга на цель. Угол ϕ обеспечивает угловое разрешение цели и торпеды, что позволяет пеленговать цель, а, следовательно, и наводить на нее торпеду на протяжении всего участка телеуправления. Однако использование текущего пеленга на цель для определения курса торпеды при формировании траектории наведения приводит в условиях взаимного перемещения объектов (носителя, цели и торпеды) к значительному линейному смещению торпеды от пеленга на цель и ухудшает условия захвата цели системой самонаведения торпеды.
Наиболее близким к представляемому техническому решению является способ телеуправляемого наведения торпеды [6], в котором обеспечивается вывод торпеды на линию, отстоящую на угол ϕ не от текущего (как в способе-аналоге), а от прогнозируемого на упрежденный момент времени пеленга на цель, который определяется с учетом текущей величины изменения пеленга. Способ включает измерение с помощью пассивной гидролокации пеленгов с носителя на цель и на торпеду; определение дистанции до торпеды; дискретное формирование траектории наведения торпеды, формирование команды управления и передачу ее по линии проводной связи с носителя на торпеду.
Недостатком способа-прототипа является создание неблагоприятных условий для обнаружения и захвата цели системой самонаведения торпеды в конце участка телеуправления при больших дальностях стрельбы. Это объясняется следующим. При удалении торпеды от носителя и неизменном угле ϕ увеличивается линейное смещение торпеды от пеленга на цель. Поэтому при больших дальностях стрельбы отведение торпеды от пеленга на цель приводит к значительному линейному смещению торпеды, определяемому в момент завершения торпедой очередного маневра назначенным курсом, и, как следствие, невозможности обнаружения и захвата цели системой самонаведения торпеды (пропуску цели).
Задачей изобретения является улучшение условий захвата цели системой самонаведения торпеды в конце участка телеуправления при больших дальностях стрельбы.
Техническим результатом изобретения является уменьшение линейного смещения торпеды от пеленга на цель в конце участка телеуправления, т.е. при переходе от телеуправления к самонаведению, что повышает возможность захвата цели системой самонаведения торпеды при больших дальностях стрельбы.
Для достижения указанного технического результата в способ телеуправляемого наведения торпеды, включающий измерение с помощью пассивной гидролокации в каждый момент времени ti пеленга ПЦ(ti) с носителя на цель, пеленга ПТ(ti) с носителя на торпеду, определение дистанции ДНТ(ti) от носителя до торпеды, вычисление величины изменения пеленга ВИП(ti) на цель, определение по ПЦ(ti) и ВИП(ti) прогнозируемого пеленга ПЦ(ti+1) на цель на упрежденный момент времени ti+1 и пеленга ПТ(ti+1) на торпеду, отстоящего от пеленга ПЦ(ti+1) на угол ϕ, обеспечивающий одновременное раздельное пеленгование цели и торпеды в момент времени ti+1, определение по ПТ(ti), ДНТ(ti) и ПТ(ti+1) курса КТ(ti+1) торпеды, обеспечивающего вывод торпеды на линию пеленга ПТ(ti+1) в момент времени ti+1 с максимальным перемещением в направлении цели, формирование команды управления на изменение курса торпеды в момент времени ti исходя из значения КТ(ti+1) и передачу ее по линии проводной связи с носителя на торпеду,
введены новые признаки, а именно:
- в момент времени ti дополнительно определяют по ПТ(ti), ДНТ(ti), ПТ(ti+1) и КТ(ti+1) дистанцию ДНТ(ti+1), далее определяют по ПТ(ti+1), ДНТ(ti+1), ПЦ(ti+1) и КТ(ti+1) эффективную дальность действия ДЭС(ti+1) системы самонаведения торпеды и линейное смещение ДТЦ(ti+1) торпеды от пеленга на цель;
- в начале участка телеуправления ДЭС(ti+1)>ДТЦ(ti+1), при этом формируют команду управления на изменение курса торпеды на значение КТ(ti+1) и продолжают действия по определению КТ(ti+1) до момента времени tn(n>i+1), когда ДЭС(tn+1)<ДТЦ(tn+1);
- в этот момент времени tn определяют по ПТ(tn), ДНТ(tn) и ПЦ(tn+1) курс КТ(tn+1) торпеды, обеспечивающий вывод ее на линию пеленга ПЦ(tn+1) на цель в момент времени tn+1 с максимальным перемещением в направлении цели, формируют команду управления на изменение курса торпеды на значение КТ(tn+1), передают ее по линии проводной связи с носителя на торпеду;
- в момент времени tn+1, когда контакт носителя с целью потерян (пеленги на торпеду и цель совмещены), переводят торпеду в режим самостоятельного наведения на цель, предварительно задав ей расчетный курс КТ(tn+2) поиска цели.
Таким образом, в предлагаемом способе при больших дальностях стрельбы в конце участка телеуправления обеспечивается вывод торпеды на линию прогнозируемого на упрежденный момент времени пеленга на цель и перевод торпеды в режим самостоятельного наведения на цель с заданием ей расчетного курса поиска цели.
Сущность изобретения поясняется фиг. 1 и 2, где на фиг. 1 приведены графические пояснения предлагаемого способа, а на фиг 2 продемонстрировано сопоставление предлагаемого способа управления торпедой и способа-прототипа.
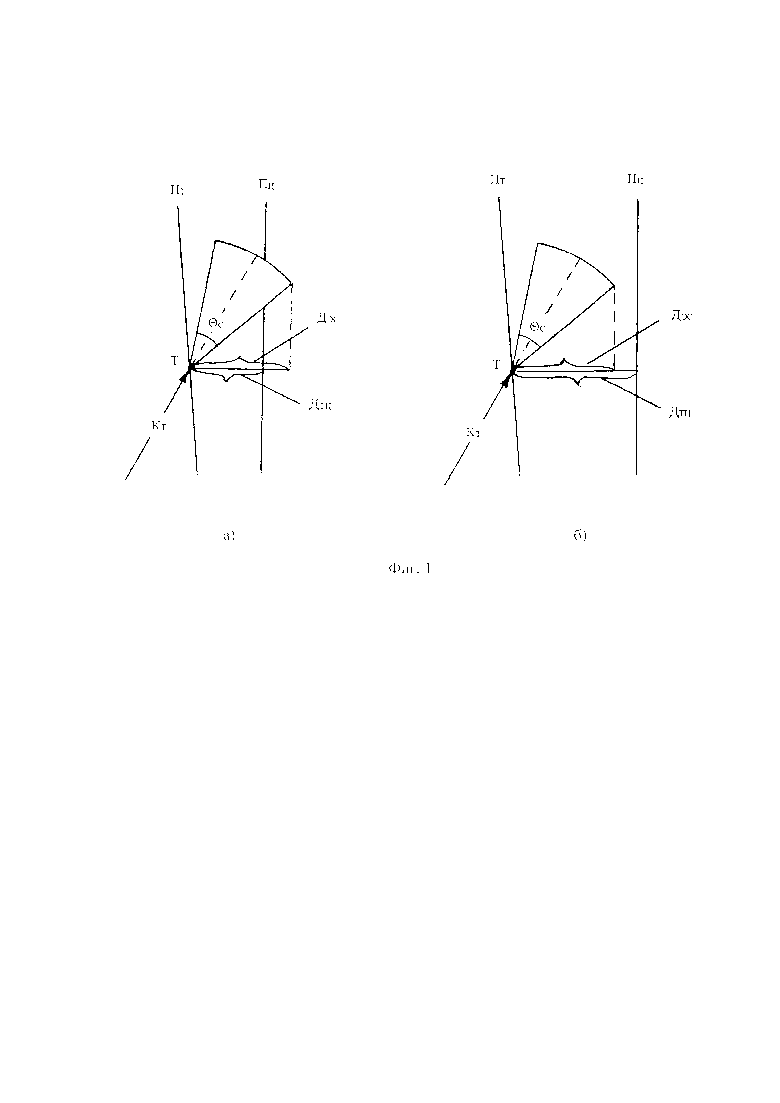
На фиг. 1 показано, в чем состоит сравнение двух показателей: эффективной дальности действия ДЭС ССН торпеды и линейного смещения ДТЦ торпеды от пеленга на цель.
Возможности ССН торпеды по обнаружению и захвату цели весьма ограничены и характеризуются, главным образом, дальностью действия ДС и шириной сектора обзора  в горизонтальной плоскости. Сектор обзора ССН узкий и составляет десятки градусов, его ось совпадает с продольной осью, т.е. с курсом КТ торпеды [1]. Поэтому эффективная (реальная) дальность действия ДЭС ССН торпеды на участке телеуправления зависит от конкретных значений КТ и ПЦ. Она определяется как проекция на нормаль от торпеды к ПЦ границы сектора обзора (ДС), отстоящей от КТ на угол
в горизонтальной плоскости. Сектор обзора ССН узкий и составляет десятки градусов, его ось совпадает с продольной осью, т.е. с курсом КТ торпеды [1]. Поэтому эффективная (реальная) дальность действия ДЭС ССН торпеды на участке телеуправления зависит от конкретных значений КТ и ПЦ. Она определяется как проекция на нормаль от торпеды к ПЦ границы сектора обзора (ДС), отстоящей от КТ на угол  . Линейное смещение торпеды определяется как расстояние от торпеды до ПЦ (по нормали к ПЦ).
. Линейное смещение торпеды определяется как расстояние от торпеды до ПЦ (по нормали к ПЦ).
В зависимости от соотношения ДЭС и ДТЦ обнаружение и захват цели, находящейся на линии пеленга ПЦ, системой самонаведения торпеды возможны (фиг. 1а, ДЭС>ДТЦ) или невозможны (фиг. 1б, ДЭС<ДТЦ).
Предложенный способ осуществляется следующим образом.
В момент времени ti носитель, цель и торпеда занимают положения Л(ti), Ц(ti) и T(ti), соответственно. В этот момент измеряют текущий пеленг ПТ(ti) на торпеду и пеленг ПЦ(ti) на цель, определяют дистанцию ДНТ(ti) от носителя до торпеды (после пуска торпеда движется с постоянной линейной скоростью), вычисляют величину изменения пеленга ВИП(ti) на цель. По пеленгу ПЦ(ti) и ВИП(ti) определяют прогнозируемый пеленг ПЦ(ti+1) на цель на упрежденный момент времени ti+1 и пеленг ПТ(ti+1) па торпеду, отстоящий от пеленга ПЦ(ti+1) на угол ϕ, обеспечивающий одновременное раздельное пеленгование цели и торпеды в момент времени ti+1. По пеленгам ПТ(ti), ПТ(ti+1) и дистанции ДНТ(ti) определяют курс КТ(ti+1) торпеды, выводящий ее на линию пеленга ПТ(ti+1) в момент времени ti+1 с максимальным перемещением в направлении цели. По пеленгам ПТ(ti), ПТ(ti+1), дистанции ДНТ(ti) и курсу КТ(ti+1) определяют дистанцию ДНТ(ti+1). По пеленгам ПТ(ti+1), ПЦ(ti+1), дистанции ДНТ(ti+1) и курсу КТ(ti+1) определяют эффективную дальность действия ДЭС(ti+1) ССН торпеды и линейное смещение ДТЦ(ti+1) торпеды от пеленга на цель.
В начале участка телеуправления ДЭС(ti+1)>ДТЦ(ti+1), при этом формируют команду управления на изменение курса торпеды на значение КТ(ti+1). Продолжают действия по определению КТ(ti+1) до момента времени tn (n>i+1), когда ДЭС(tn+1)<ДТЦ(tn+1). В этот момент времени tn определяют по ПТ(tn), ДНТ(tn) и ПЦ(tn+1) курс торпеды КТ(tn+1), обеспечивающий вывод торпеды на линию пеленга ПЦ(tn+1) на цель в момент времени tn+1 с максимальным перемещением в направлении цели, формируют команду управления на изменение курса торпеды на значение КТ(tn+1) и передают ее по линии проводной связи с носителя на торпеду.
В момент времени tn+1, когда контакт носителя с целью потерян, переводят торпеду в режим самостоятельного наведения на цель, предварительно задав ей расчетный курс КТ(tn+2) поиска цели.
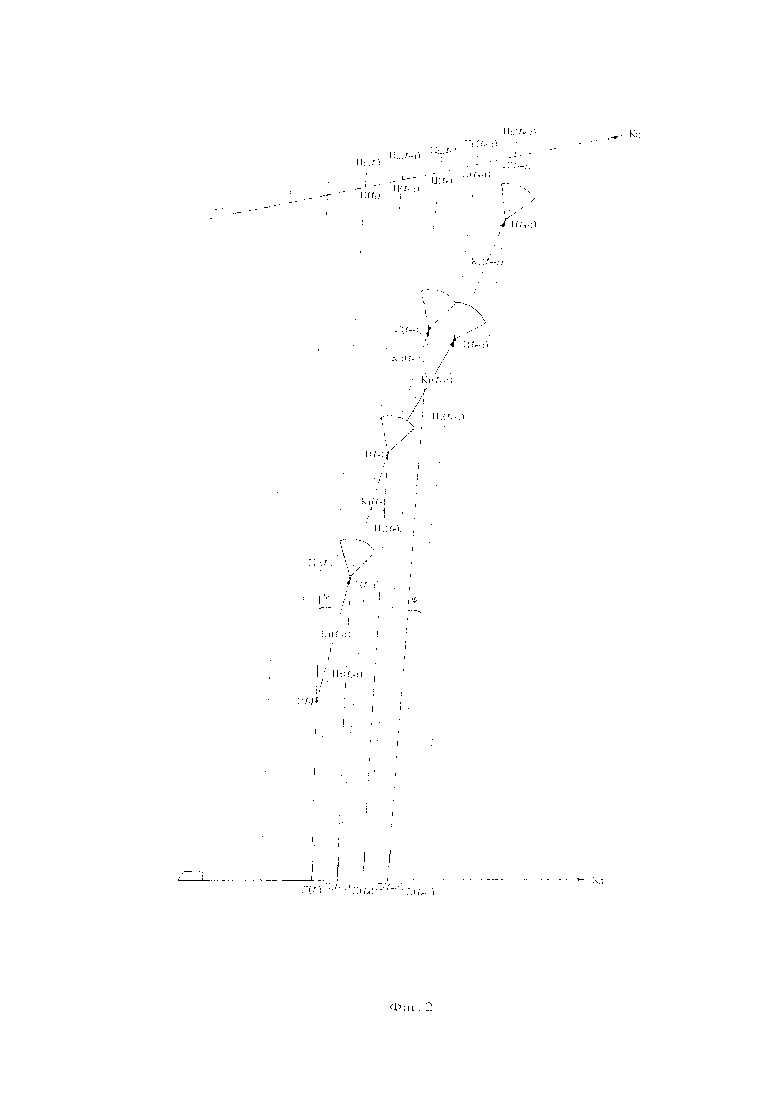
Сравнение предлагаемого способа и способа-прототипа приведено на фиг. 2. На ней пунктиром показаны расчетные курс КЦ цели и положения Ц(ti) - Ц(tn+2) цели на моменты времени ti - tn+2, курс К'Т(tn+1) и положение T'(tn+1) торпеды для способа-прототипа, расчетные курс КТ(tn+2) и положение T(tn+2) торпеды на момент времени tn+2 при ее работе в режиме самостоятельного наведения на цель.
Прогнозируемые пеленги ПЦ(ti) - ПЦ(tn) на цель на моменты времени ti - tn на фиг. 2 совпадают с пеленгами ПЦ(ti) - ПЦ(tn), измеряемыми системой пассивной гидролокации носителя в моменты времени ti - tn.
Сравнение способов показывает, что при использовании способа-прототипа обнаружение и захват цели, находящейся на линии пеленга ПЦ(tn+1), системой самонаведения торпеды, занимающей положение T'(tn+1), невозможны, так как линейное смещение ДТЦ(ti+1) торпеды от пеленга на цель превышает эффективную дальность действия ДЭС(ti+1) ССН торпеды (более наглядно см. фиг. 1б). В предлагаемом способе уменьшение линейного смещения торпеды (вплоть до его отсутствия) в конце участка телеуправления позволяет исключить пропуск цели системой самонаведения торпеды и, при задании ей расчетного курса поиска цели в начале участка самонаведения, повышает возможность обнаружения и захвата цели системой самонаведения.
Реализация заявляемого способа телеуправляемого наведения торпеды осуществляется известными техническими средствами. Обнаружение цели, непрерывное пеленгование цели и выпущенной торпеды ведется с помощью трактов шумопеленгования [7], принцип работы и технические средства для непосредственной реализации телеуправления торпедами изложены в обзоре [2] и в статье [5].
Таким образом, предлагаемый способ телеуправляемого наведения торпеды при больших дальностях стрельбы обеспечивает уменьшение линейного смещения торпеды от пеленга на цель в конце участка телеуправления, т.е. при переходе от телеуправления к самонаведению, и приводит к улучшению условий захвата цели системой самонаведения торпеды.
Источники информации
1 Забнев А.Ф. Торпедное оружие. М.: Воениздат, 1984. С. 27-37.
2 Климов М. Морское подводное оружие: проблемы и возможности // Военно-промышленный курьер, 2010; часть 1 - вып. 21 (337), часть 2 - вып. 2 (338).
3 Патент РФ №2465535. Способ телеуправления ракетой. Заявл. 12.05.2011, публ. 27.10.2012.
4 Антипов В.А., Макарчук Ю.И., Обчинец О.Г., Охрименко С.Н. Особенности решения задач телеуправления. // Морской сборник. 2016. №5, С. 72-75.
5 Любан И.Б., Черкас Я.А. Аналитический обзор методов телеуправления и рекомендации по их применению при наведении торпед // Подводное морское оружие, 2004. Вып. 3. С. 41-49.
6 Патент РФ №2631227. Способ наведения торпеды, управляемой по проводам. Заявл. 01.06.2016, публ. 19.09.2017 (Прототип).
7 Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. СПб: Наука, 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТОРПЕДЫ, УПРАВЛЯЕМОЙ ПО ПРОВОДАМ | 2016 |
|
RU2631227C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ТОРПЕДОЙ | 2019 |
|
RU2736660C2 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ТОРПЕДАМИ | 2019 |
|
RU2733734C2 |
| СПОСОБ ТЕЛЕУПРАВЛЯЕМОГО НАВЕДЕНИЯ ПОДВОДНОГО АППАРАТА | 2018 |
|
RU2700827C1 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ ОТ ТОРПЕДЫ | 2020 |
|
RU2746085C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ | 2017 |
|
RU2692332C2 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ И СУДНА ОТ ПОРАЖЕНИЯ ТОРПЕДОЙ | 2019 |
|
RU2733732C1 |
| Система для поражения торпедами надводной цели | 2022 |
|
RU2831207C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| САМОХОДНЫЙ ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ | 2017 |
|
RU2688562C1 |
Изобретение относится к области военной техники и может быть использовано в системах наведения телеуправляемого торпедного оружия. Способ телеуправляемого наведения торпеды включает измерение с помощью пассивной гидролокации пеленгов с носителя на цель и на торпеду, определение дистанции от носителя до торпеды, вычисление величины изменения пеленга на цель, определение прогнозируемого на упрежденный момент времени пеленга на цель и пеленга на торпеду, отстоящего от пеленга на цель на угол, обеспечивающий одновременное раздельное пеленгование цели и торпеды, дискретное формирование траектории наведения торпеды. Затем формируются команды управления и передаются по линии проводной связи с носителя на торпеду, в заданные моменты времени управления торпедой дополнительно определяют эффективную дальность действия системы самонаведения торпеды и линейное смещение торпеды от пеленга на цель и в зависимости от их соотношения формируют траекторию наведения торпеды. В конце участка телеуправления выводят торпеду на линию прогнозируемого пеленга на цель и переводят ее в режим самостоятельного наведения с заданием расчетного курса поиска цели. Техническим результатом изобретения является уменьшение линейного смещения торпеды от пеленга на цель в конце участка телеуправления, т.е. при переходе от телеуправления к самонаведению, и повышение возможностей захвата цели системой самонаведения торпеды при больших дальностях стрельбы. 2 ил.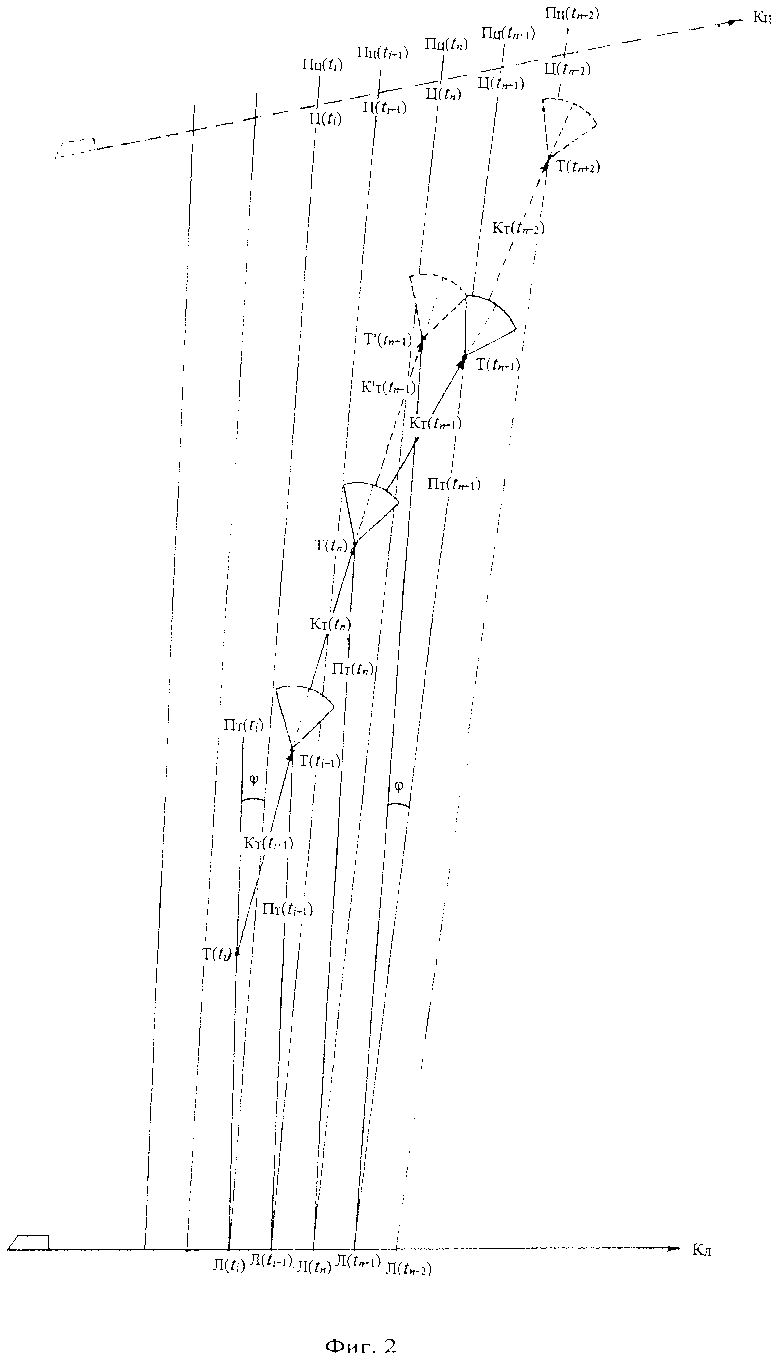
Способ наведения торпеды, управляемой по проводам, включающий измерение с помощью пассивной гидролокации в каждый момент времени ti пеленга ПЦ(ti) с носителя на цель, пеленга ПТ(ti) с носителя на торпеду, определение дистанции ДНТ(ti) от носителя до торпеды, вычисление величины изменения пеленга ВИП(ti) на цель, определение по ПЦ(ti) и ВИП(ti) прогнозируемого пеленга ПЦ(ti+1) на цель на упрежденный момент времени ti+1 и пеленга ПТ(ti+1) на торпеду, отстоящего от ПЦ(ti+1) на угол ϕ, обеспечивающий одновременное раздельное пеленгование цели и торпеды в момент времени ti+1, определение по ПТ(ti), ДНТ (ti) и ПТ(ti+1) курса КT(ti+1) торпеды, обеспечивающего вывод торпеды на линию пеленга ПT(ti+1) на торпеду в момент времени ti+1 с максимальным перемещением в направлении цели, формирование команды управления на изменение курса торпеды в момент времени ti, исходя из значения КТ(ti+1) и передачу ее по линии проводной связи с носителя на торпеду, отличающийся тем, что в момент времени ti дополнительно определяют: по ПТ(ti), ДНТ (ti), ПТ(ti+1) и КT(ti+1) дистанцию ДНТ(ti+1), по ПT(ti+1), ДНТ(ti+1), ПЦ(ti+1) и КТ(ti+1) эффективную дальность действия ДЭС(ti+1) системы самонаведения торпеды и линейное смещение ДТЦ(ti+1) торпеды от пеленга на цель; в начале участка телеуправления ДЭС(ti+1)>ДТЦ(ti+1), при этом формируют команду управления на изменение курса торпеды на значение КT(ti+1) и продолжают действия по определению КТ(ti+1) до момента времени tn (n>i+1), когда ДЭС(tn+1)<ДТЦ(tn+1), и в этот момент времени tn определяют по ПТ(tn), ДНТ(tn) и ПЦ(tn+1) курс торпеды КТ(tn+1), обеспечивающий вывод торпеды на линию пеленга ПЦ(tn+1) на цель в момент времени tn+1 с максимальным перемещением в направлении цели, формируют команду управления на изменение курса торпеды на значение КТ(tn+1), передают ее по линии проводной связи с носителя на торпеду, а в момент времени tn+1, когда контакт носителя с целью потерян, переводят торпеду в режим самостоятельного наведения на цель, предварительно задав ей расчетный курс КТ(tn+2) поиска цели.
| СПОСОБ НАВЕДЕНИЯ ТОРПЕДЫ, УПРАВЛЯЕМОЙ ПО ПРОВОДАМ | 2016 |
|
RU2631227C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| Гидроакустический способ управления торпедой | 2017 |
|
RU2649675C1 |
| СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2013 |
|
RU2551834C1 |
| FR 2947914 A1, 14.01.2011. | |||

