Изобретение относится к области измерительной техники и приборостроения и может быть использовано в качестве лазерного доплеровского локатора с когерентной обработкой для обнаружения, автосопровождения, измерения текущих угловых координат (азимута и угла места), наклонной дальности и радиальной скорости низколетящих ракет морского и наземного базирования в интересах Министерства обороны страны.
Традиционно обнаружение низколетящих целей, их автосопровождение по угловым координатам и измерение радиальной скорости полета дифракционно ограниченных объектов осуществляют применением доплеровских локаторов с непрерывным режимом немодулированного излучения, однако решение задачи измерения наклонной дальности требует применения модуляции излучения (импульсной, частотной и др.), что существенно снижает предельную дальность проведения этих измерений из-за потерь энергии излучения во внешнем электрооптическом модуляторе [1-4]. В то же время триангуляционные методы измерения наклонной дальности с использованием немодулированного излучения, обеспечивающего наивысший энергетический потенциал локатора при заданной рабочей мощности излучающего лазера, связаны с необходимостью рассредоточения на море группы локаторов, образующих триангуляционную сеть, что снижает эффективность работы такой сети, например, на кораблях из-за требования жесткой взаимной привязки координат кораблей в условиях их движения в боевой обстановке. Береговые триангуляционные системы лазерной локации имеют ограниченный радиус действия и не могут использоваться при значительном удалении от берега кораблей, оснащенных средствами противоракетной обороны.
Известно применение согласованной фильтрации локационных сигналов на основе дисперсионных линий задержки для повышения отношения сигнал/шум [5-21], а также использование средств стабилизации лазерного излучения для повышения обнаружительной способности лазерных локаторов с непрерывным режимом излучения [22-26]. Известно использование при обработке линейно-частотно-модулированных (ЛЧМ) сигналов в импульсных лазерных локаторах, в которых применяются ЛЧМ импульсные излучения по треугольному закону, позволяющие измерять как радиальную скорость целей, так и их наклонную дальность. Однако такие импульсные локаторы требуют применения внешних электрооптических модуляторов лазерного излучения, что снижает энергетический потенциал таких локаторов.
Известно решение - лазерный доплеровский локатор, подобный рассмотренному в [12], содержащий CO2-лазер непрерывного действия, передающий телескоп, приемный объектив, фотоприемник, работающий в гомодинном режиме фотосмешения, соединенный с последовательно связанными малошумящим широкополосным усилителем, смесителем, ко второму входу которого подключен генератор линейно-частотно-модулированного (ГЛЧМ) импульсного сигнала, синхронизируемого от делителя частоты генератора синхроимпульсов, широкополосным усилителем, согласованным фильтром на дисперсионной линии задержки, компенсирующим потери широкополосным усилителем, амплитудным детектором, пороговым устройством, блоком формирования сигнала радиальной скорости и персональным компьютером с дисплеем и блоком управления, к которому подключен блок измерения азимута и угла места цели.
К недостатку этого лазерного доплеровского локатора относится его неспособность измерения наклонной дальности цели, что не позволяет определить ее текущие координаты, являющиеся важнейшими характеристиками локационной задачи, без определения которых невозможно боевое противодействие ракетному удару в морской операции со стороны потенциального противника.
Известным аналогом заявляемого технического решения является лазерный локатор [27], содержащий CO2-лазер непрерывного действия, передающий телескоп, приемный объектив, фотоприемник, работающий в гомодинном режиме фотосмешения, соединенный с последовательно связанными малошумящим высокочастотным широкополосным усилителем, смесителем, ко второму входу которого подключен генератор линейно-частотно-модулированниго (ЛЧМ) импульсного сигнала, синхронизируемого от делителя частоты генератора синхроимпульсов, широкополосным усилителем, согласованным фильтром на дисперсионной линии задержки, компенсирующим потери широкополосным усилителем, амплитудным детектором, пороговым устройством, блоком формирования сигнала радиальной скорости, второй вход которого подключен к выходу генератора синхроимпульсов, а третий - к выходу делителя частоты синхроимпульсов, и персональным компьютером с дисплеем и пультом управления, к которому подключен блок измерения азимута и угла места цели, отличающийся тем, что в оптический резонатор CO2-лазера непрерывного действия введен пьезоэлектрический корректор, связанный механически с глухим отражателем оптического резонатора, а электрически - с выходом регулируемого по амплитуде усилителя, связанного с регулируемым по частоте генератором переменного тока, а канал измерения дальности включает последовательно связанные с выходом фотоприемника малошумящий среднечастотный полосовой усилитель, смеситель, второй вход которого подключен к выходу гетеродина, полосовой фильтр, частотный детектор, резонансный усилитель, измеритель разности фаз, второй вход которого подключен к выходу генератора переменного тока, и блок формирования сигнала дальности.
Недостатками этого устройства является сложность структуры канала измерения дальности и отсутствие элементов автоматического сопровождения движущейся цели по угловым координатам.
Ближайшим аналогом заявляемого технического решения является лазерный когерентный локатор целеуказания, содержащий одночастотный CO2-лазер непрерывного действия с блоком электронной накачки, передающий телескоп, приемный объектив, фотоприемное устройство, работающее в гомодинном режиме фотосмешения, соединенное с последовательно связанными малошумящим высокочастотным широкополосным усилителем, смесителем, ко второму входу которого подключен генератор линейно-частотно-модулированниго импульсного сигнала, синхронизируемого от высокочастотного генератора синхроимпульсов через делитель частоты, широкополосным усилителем, согласованным фильтром на дисперсионной линии задержки, компенсирующим потери широкополосным усилителем, амплитудным детектором, пороговым устройством, блоком измерения радиальной скорости, второй вход которого подключен к выходу делителя частоты, третий его вход подключен к выходу высокочастотного генератора синхроимпульсов, а выход соединен с первым входом персонального компьютера с дисплеем и пультом управления, ко второму и третьему входам которого подключен блок датчиков измерения азимута и угла места цели, установленных в приемно-передающем модуле с блоком управления азимутальным и угломестным приводами, а также включающим канал измерения дальности до цели на основе установки в оптический резонатор одночастотного CO2-лазера непрерывного действия пьезоэлектрического корректора, связанного механически с глухим отражателем оптического резонатора, а также последовательно соединенных измерителя разности фаз низкочастотного модулирующего сигнала управления пьезоэлектрическим корректором и блока измерения дальности, подключенного к четвертому входу персонального компьютера, к пятому входу которого подключен выход высокочастотного генератора синхроимпульсов, отличающийся тем, что выход фотоприемного устройства дополнительно соединен с последовательно включенными низкочастотным резонансным усилителем, компаратором, измерителем разности фаз, ко второму входу которого подключен выход делителя частоты, входом соединенного с выходом высокочастотного генератора синхроимпульсов, выход которого также подключен к третьему входу измерителя разности фаз; низкочастотный сигнал с выхода делителя частоты синхронизирует работу генератора переменного напряжения, подключенного в резонансную цепь с пьезоэлектрическим корректором одночастотного CO2-лазера и регулируемого по амплитуде колебаний, модулирующих частоту лазерного излучения в диапазоне его одной моды (ширины контура усиления); причем фотоприемное устройство выполнено четырехквадрантным, выходы каждого из равновеликих квадрантов, попарно образующие азимутальные и угломестные суммарно-разностные каналы соединены с двумя входами блока управления приводами - азимутальным и угломестным - ориентации взаимно коллинеарных оптических осей передающего телескопа и приемного объектива, а блок управления приводами двунаправленно связан информационной шиной управления с персональным компьютером, к шестому входу которого подключен выход делителя частоты высокочастотного генератора синхроимпульсов.
Недостатком прототипа является раздельное, несовмещенное вдоль одной оптической оси расположение передающего и приемного оптических трактов локатора, что усложняет процедуру совместного сканирования этих трактов по угловым координатам, например, с помощью сканируемых зеркал.
Указанный недостаток устранен в заявляемом когерентном локаторе.
Целью изобретения является совмещение вдоль одной оптической оси передающего телескопа и приемного объектива локатора.
Указанная цель достигается тем, что заявляемый лазерный когерентный локатор для ракет морского базирования, содержащий одночастотный CO2-лазер непрерывного действия с блоком электронной накачки, передающий телескоп, приемный объектив, фотоприемное устройство, работающее в гомодинном режиме фотосмешения, соединенное с последовательно связанными малошумящим высокочастотным широкополосным усилителем, смесителем, ко второму входу которого подключен генератор линейно-частотно-модулированниго импульсного сигнала, синхронизируемого от высокочастотного генератора синхроимпульсов через делитель частоты, широкополосным усилителем, согласованным фильтром на дисперсионной линии задержки, компенсирующим потери широкополосным усилителем, амплитудным детектором, пороговым устройством, блоком измерения радиальной скорости, второй вход которого подключен к выходу делителя частоты, третий его вход подключен к выходу высокочастотного генератора синхроимпульсов, а выход - с первым входом персонального компьютера с дисплеем и пультом управления, ко второму и третьему входам которого подключен блок датчиков измерения азимута и угла места цели, установленных в приемно-передающем модуле с блоком управления азимутальным и угломестным приводами, а также включающий канал измерения дальности до цели на основе установки в оптический резонатор одночастотного CO2-лазера непрерывного действия пьезоэлектрического корректора, связанного механически с глухим отражателем оптического резонатора, а также последовательно соединенных измерителя разности фаз низкочастотного модулирующего сигнала управления пьезоэлектрическим корректором и блока измерения дальности, подключенного к четвертому входу персонального компьютера, к пятому входу которого подключен выход высокочастотного генератора синхроимпульсов, выход фотоприемного устройства дополнительно соединен с последовательно включенными низкочастотным резонансным усилителем, компаратором, измерителем разности фаз, ко второму входу которого подключен выход делителя частоты, входом соединенного с выходом высокочастотного генератора синхроимпульсов, выход которого также подключен к третьему входу измерителя разности фаз; низкочастотный сигнал с выхода делителя частоты синхронизирует работу генератора переменного напряжения, подключенного в резонансную цепь с пьезоэлектрическим корректором одночастотного CO2-лазера и регулируемого по амплитуде колебаний, модулирующих частоту лазерного излучения в диапазоне его одной моды (ширины контура усиления); причем фотоприемное устройство выполнено четырехквадрантным, выходы каждого из равновеликих квадрантов, попарно образующие азимутальные и угломестные суммарно-разностные каналы, соединены с двумя входами блока управления приводами - азимутальным и угломестным, а блок управления приводами двунаправленно связан информационной шиной управления с персональным компьютером, к шестому входу которого подключен выход делителя частоты высокочастотного генератора синхроимпульсов, согласно изобретению дополнен двумя наклонно установленными зеркалами, оптически связывающими оптический выход одночастотного CO2-лазера с передающим телескопом, установленном в центральном отверстии приемного объектива.
Установка передающего телескопа в центральном отверстии приемного объектива позволяет совместить оптические оси этих оптических приборов, что упрощает конструкцию приемно-передающего тракта и работу азимутально-угломестного привода локатора.
Упрощение конструкции канала дальности объясняется использованием низкочастотного сигнала из спектра, образующегося в результате гомодинного фотосмешения части передаваемого и принимаемого оптического излучения с его выделением малошумящим резонансным усилителем и компарированием, временная разница положения фронта импульса на выходе которого, отстоящего от фронта импульса запуска низкочастотного генератора переменного напряжения, подаваемого на пьезоэлектрический корректор, содержит информацию о наклонной дальности до цели.
Автоматическое сопровождение цели по угловым координатам с помощью азимутального и угломестного приводов приемно-передающего оптического модуля стало возможным благодаря выполнению фотоприемного устройства с четырехквадрантным фоточувствительным слоем, например, на основе соединения кадмий-ртуть-теллур (КРТ), охлаждаемого жидким азотом, расположенным в зоне диска Эйри приемного объектива. Четыре электрически между собой не связанных элемента КРТ образуют два суммарно-разностных канала - азимутальный и угломестный, в которых образуются сигналы ошибки раздельно в каждом из указанных каналов, которые используются для подстройки азимутального и угломестного положения взаимно коллинеарных оптических осей передающего телескопа и приемного объектива соответствующими электроприводами так, что диск Эйри принимаемого излучения располагается симметрично (по центру) относительно всех четырех квадрантов фотоприемного устройства. Кроме того, высокочастотные и низкочастотные сигналы, образующиеся на всех четырех квадрантах, суммируются и поступают соответственно в каналы измерения скорости и дальности цели.
Состав и принцип действия заявляемого технического решения поясняется представленными рисунками. На рис. 1 представлена блок-схема локатора, на рис. 2 поясняется работа канала измерения радиальной скорости цели по доплеровскому сдвигу частоты когерентного оптического излучения. На рис. 3 показана структура фотоприемного устройства - его суммарно-разностных каналов и суммарного информационного канала.
Заявляемое устройство (рис. 1) содержит следующие элементы и блоки:
1 - одночастотный CO2-лазер с непрерывным излучением,
2 - полупрозрачное зеркало оптического резонатора лазера,
3 - глухое зеркало оптического резонатора лазера,
4 - пьезоэлектрический корректор (он же конденсатор резонансного контура),
5 и 6 - электроды электронной накачки активного вещества лазера,
7 - блок электронной накачки лазера, например, на основе высокочастотного высоковольтного генератора,
8 - передающий телескоп,
9 - светоделительный элемент с малым коэффициентом отражения и большим пропусканием,
9a - первое поворотное зеркало передающего канала,
10 - приемный объектив,
11 - фотоприемное устройство (ФПУ) на соединении КРТ, охлаждаемом жидким азотом,
12 - малоапертурный отражатель.
12a - второе поворотное зеркало передающего канала,
13 - делитель частоты (ДЧ) с коэффициентом деления К частоты синхроимпульсов,
14 - синхронизируемый низкочастотный генератор переменного напряжения,
15 - малошумящий широкополосный усилитель на диапазон возможных доплеровских сдвигов частоты оптического излучения лазера,
16 - смеситель,
17 - генератор линейно-частотно-модулированных импульсов (ГЛЧМ),
18 - высокочастотный генератор синхроимпульсов (ГСИ),
19 - широкополосный усилитель,
20 - дисперсионная линия задержки (ДЛЗ) с большой величиной базы,
21 - усилитель коротких импульсов с широким спектром,
22 - амплитудный детектор,
23 - пороговое устройство (ограничитель по минимуму) с заданным порогом,
24 - вычислитель радиальной скорости V,
25 - персональный компьютер с дисплеем и пультом управления,
26 - низкочастотный резонансный усилитель,
27 - компаратор,
28 - измеритель разности фаз (ИРФ) - измеритель временных интервалов, задаваемых числом синхроимпульсов в измеряемом временном интервале, это число синхроимпульсов содержит информацию о наклонной дальности до цели,
29 - вычислитель дальности D,
30 - блок датчиков угла места (ε) и азимута (β),
31 - блок управления приводами (БУП) - азимутальным и угломестным.
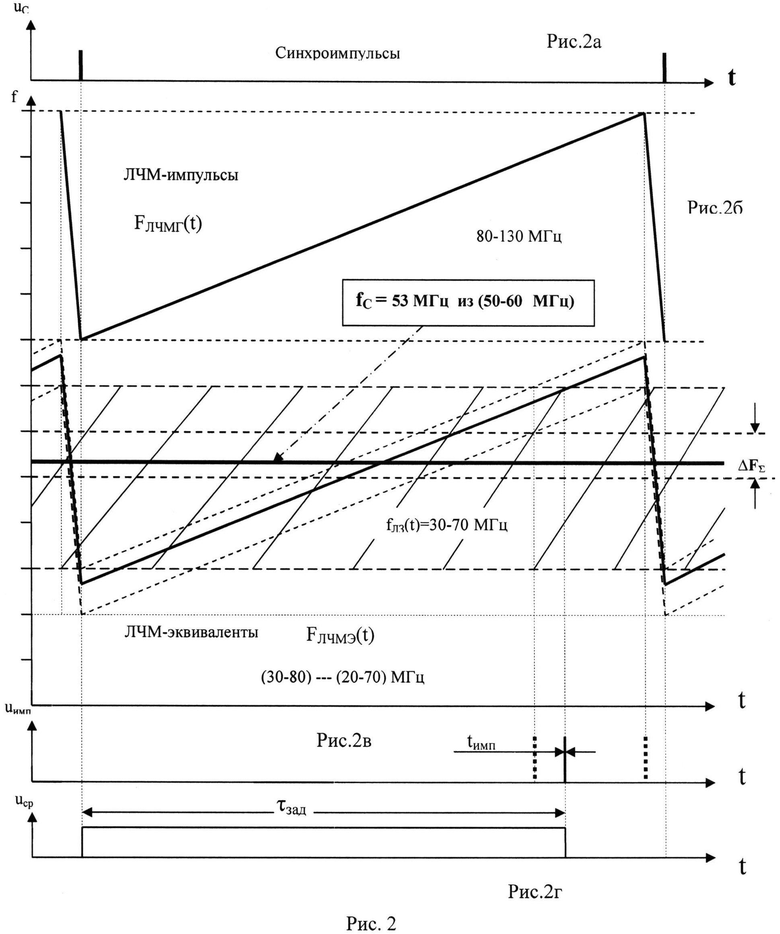
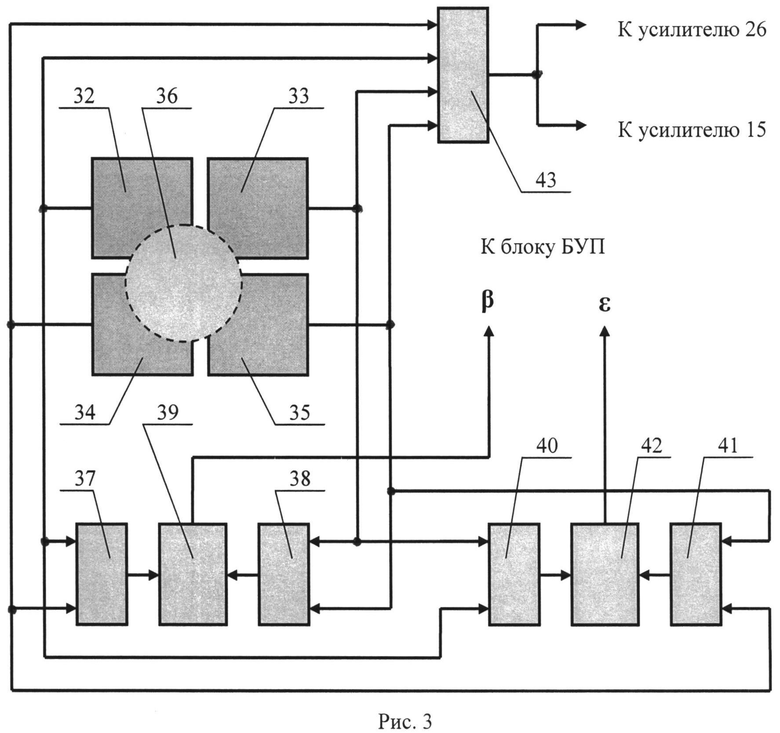
На рис. 2 представлены графики, отображающие работу канала измерения скорости лазерного локатора. На рис. 3 дана блок-схема ФПУ с двумя суммарно-разносными канналами и общим суммирующим каналом в составе следующих элементов:
32…35 - электрически раздельные квадранты фотоприемного слоя - приемников на КРТ,
36 - зона облучения от приемного объектива - диск Эйри,
37 и 38 - сумматоры азимутальных квадрантов,
39 - разностное устройство азимутального канала,
40 и 41 - сумматоры угломестных квадрантов,
42 - разностное устройство угломестного канала,
43 - общий сумматор всех четырех квадрантов ФПУ.
Рассмотрим действие локатора.
С помощью неполностью указанных на рис. 1 технических средств наведения по азимуту β и углу места ε излучения CO2-лазера непрерывного действия 1, сформированного передающим телескопом 8, установленным в центральном отверстии приемного объектива и снабженным двумя наклонными зеркалами 9a и 12a, в узкий пучок, на цель, например низколетящую над уровнем моря ракету, а рассеянное ею излучение формируется приемным объективом 10 в его фокусе в диск Эйри - квазиточечную плоскую волну, которая воздействует на фоточувствительную поверхность фотоприемного устройства 11 совместно с плоской волной гомодинного канала, образованного расщепителем излучения 9 и малоапертурным отражателем 12. В результате фотосмешения указанных пучков когерентного излучения с одинаковой поляризацией на выходе фотоприемного устройства 11 образуется электрический сигнал с разностной частотой Δν(t), величина которой определяется частотами оптических колебаний - излучаемого νИЗЛ(t) и принимаемого νПР(t), которые определяются в функции времени t следующими равенствами:


где νO - средняя частота излучения CO2-лазера непрерывного действия 1,
ΔνМОД - амплитуда отклонения частоты излучения от средней νO в процессе внутренней частотной модуляции по гармоническому закону при работе пьезоэлектрического корректора 4, периодически изменяющего длину оптического резонатора лазера,
ω=2πf - круговая частота гармонических колебаний, вырабатываемых в перестраиваемом по частоте генераторе переменного тока 13,
f - частота этих колебаний,
D - текущее значение наклонной дальности до цели,
V - значение радиальной скорости цели, приближающейся к локатору,
c=3∗108 м/с - электродинамическая постоянная скорость света в вакууме.
Для CO2-лазера частота νO≈3∗1013 Гц. Ширина контура усиления составляет около 60 МГц, величину ΔνМОД можно выбирать в пределах до 30 МГц внутри указанного контура усиления. Подстройка величины ΔνМОД осуществляется регулировкой амплитуды UМОД гармонических колебаний, воздействующих на пьезоэлектрический корректор 4 с выхода синхронизируемого низкочастотного генератора переменного напряжения 14:

Пусть выбираем ΔνМОД=10 МГц. Учитывая, что ΔνМОД<<νO (более чем на 6 порядков), выражение (2) можно с достаточной степенью точности переписать в виде:

В результате фотосмешения взаимно когерентных оптических колебаний, определяемых в (1) и (4), на выходе фотоприемного устройства 11 выделяется электрическое колебание uФ(t) вида:

где UФD - амплитуда частотно-модулированных электрических колебаний канала дальности, UФV - амплитуда гармонических высокочастотных колебаний канала скорости. Выделяющиеся на выходе фотоприемника 11 спектральные компоненты сигналов с амплитудами UФD и UФV существенно разнесены по спектру, то есть легко отфильтровываются друг от друга и могут быть обработаны раздельно соответственно в каналах скорости и дальности локатора.
Выделение в канале скорости локатора, составленном на элементах 15-24 (рис. 1), значения измеряемой радиальной скорости V общеизвестно из рассмотрения прототипа. За счет эффекта Доплера принимаемое локатором излучение, рассеянное приближающейся к локатору цели, смещено на величину ΔνV=2νOV/с, поэтому радиальная скорость находится из простого выражения:

Сигнал доплеровского смещения ΔνV воспринимается малошумящим высокочастотным широкополосным усилителем 15 (например, в диапазоне 50…60 МГц применительно к локации ракет типа «Гарпун») и поступает на смеситель 16 канала скорости, на второй вход которого воздействуют периодически следующие импульсные линейно-частотно-модулированные колебания с генератора ГЛЧМ 17, запускаемого синхроимпульсами с выхода генератора синхроимпульсов 18. В результате преобразования на выходе смесителя 16 канала скорости выделяются эквивалентные линейно-частотно-модулированные импульсные сигналы (ЛЧМЭ), которые после их усиления в широкополосном усилителе 19 подвергаются спектро-временному «сжатию» в дисперсионной линии задержки (ДЛЗ) 20, имеющей полосу пропускания ΔFЛЗ и длительность импульсной характеристики τЛЗ, значения которых определяют базу ДЛЗ В=ΔFЛЗ τЛЗ>>>1. Ультракороткий радиоимпульсный сигнал с выхода ДЛЗ 20 усиливается в компенсирующем потери широкополосном усилителе 21 с полосой пропускания, не меньшей полосы ΔFЛЗ (поскольку длительность «сжатого» радиоимпульса tИМП≈1/ΔFЛЗ), детектируется по амплитуде в амплитудном детекторе 22 и подвергается пороговому ограничению по минимуму в пороговом устройстве 23, уровень порога в котором выбирается из соображений получения необходимой вероятности правильного измерения (обнаружения) при заданной вероятности ложных тревог.
Затем импульсный сигнал поступает на блок формирования сигнала радиальной скорости 24, в котором по временному положению фронта этого импульса относительно фронта соответствующего синхроимпульса генератора синхроимпульсов 18 формируется двоичный код, отображающий значение искомой радиальной скорости V согласно (6), и эти данные передаются на первый вход персонального компьютера 25 с дисплеем и пультом управления.
На рис. 2 отображена процедура измерительного процесса в канале скорости локатора. На рис. 2a представлена периодическая последовательность синхроимпульсов uC(t) генератора синхроимпульсов 18. На рис. 2б представлен периодически следующий сигнал ГЛЧМ 17 с частотной перестройкой внутри импульса от 80 МГц до 130 МГц для работы по ракете «Гарпун», скорость движения которой составляет 300 м/с. Если эта ракета движется прямо на локатор, доплеровский сдвиг ΔνV=60 МГц. Пусть, например, ракета движется под некоторым углом к линии зондирования локатора и доплеровский сдвиг равен ΔνV=53 МГц (угол отклонения от линии визирования около 28°), что показано на рис. 2в жирной горизонтальной линией. Частота ЛЧМЭ-сигнала (на выходе смесителя 16) показана на этом рисунке жирной пилообразной линией. При возможном разбросе доплеровского сдвига от 50 до 60 МГц (то есть в полосе неопределенности ΔFΞ) сигнал ЛЧМЭ может изменяться в диапазоне от 20…70 МГц до 30…80 МГц. При этом ДЛЗ 20 с полосой 20 МГц в диапазоне от 60 до 80 МГц «сжимает» ЛЧМЭ до величины tИМП=50 нс. При длительности импульсной характеристики ДЛЗ 20 tЛЗ≈100 мкс имеем базу ДЛЗ В=2000. Такая большая величина базы позволяет, как известно, увеличить отношение сигнал/шум на выходе ДЛЗ в (В)1/2 раз, то есть в данном примере в 44,7 раза или 33 по напряжению.
Для правильного выбора порога ограничения в пороговом устройстве 21 канала измерения радиальной скорости цели обратимся к рассмотрению критериев обнаружения. Как известно, отношение сигнал/шум µ однозначно определяет обнаружительные вероятностные характеристики локатора. Так, вероятность обнаружения Pобн сигнала на фоне нормального (гауссова) шума в соответствии с критерием Неймана-Пирсона определяется отношением сигнал/шум µ на входе решающего устройства с установленным в нем нормированным порогом (αп=uп/σш, где σш - среднеквадратическое напряжение шума на входе решающего устройства, Uп - пороговое напряжение, вычисляется из выражения


- интеграл вероятности, а вероятность ложных тревог Pлт равна Pлт=1-Ф(αп).
Для обычно задаваемых при расчетах локационных систем величинах вероятностей обнаружения и ложных тревог требуемое отношение сигнал/шум определяется из выражения:

где Ф-1(х) - обратный интеграл вероятности.
Временное положение «сжатого» радиоимпульса показано на рис. 2в снизу рисунка. Это положение кодируется длительностью импульса, представленного на рис. 2г, относительно запускающего импульса с выхода делителя частоты 13 на рис. 2а и подсчетом числа синхроимпульсов с выхода ГСИ 18, заполняющих формируемы импульс τЗАД. Этот код отображает значение радиальной скорости V и поступает на первый вход персонального компьютера с дисплеем 25.
Теперь рассмотрим процедуру измерения наклонной дальности до цели.
Выделяемая на выходе фотоприемника 11 спектральная компонента с амплитудой UФD усиливается в малошумящем резонансном усилителе 26, на входе которого действует спектральная составляющая

где UD - амплитуда гармонического колебания на выходе резонансного усилителя 26, поскольку на фотоприемное устройство поступают оптические излучения: сигнальное uФD(t)=UФDcos2π[ΔνМОДcosω(t-2D/с)]t и гетеродинное uГЕТ(t)=uГЕТcos2π(ΔνМОДcosωt)t, что и определяет появление спектральной компоненты, указанной в (10).
Сигнал в форме (10) поступает на компаратор 27 и дальше на первый вход измерителя разности фаз 28, ко второму входу которого подключен выход делителя частоты 13. Разность фаз Δφ, измеряемая в блоке 28 и определяемая временным интервалом между фронтами импульсов, поступающих на первый и второй входы ИРФ 28, как понятно, определяется выражением

откуда в измерителе дальности 29 находят значение наклонной дальности:

где измеряемый сдвиг по фазе Δφ для однозначного отсчета наклонной дальности лежит в пределах 0≤Δφ≤2π. Измеряемая разность фаз Δφ сравниваемых низкочастотных гармонических колебаний квантуется последовательностью импульсов с выхода ГСН 18, для чего третий вход ИРФ 28 связан с выходом ГСИ 18, и подсчитанное число этих импульсов определяет искомую величину наклонной дальности D до цели.
Тогда для максимального значения измеряемой наклонной дальности DMAX находим частоту колебаний f=ω/2π в генераторе переменного напряжения 14 из выражения:

Так, при частоте f=10 кГц граничное значение DMAX=15 км, что вполне достаточно для тактического использования лазерного локатора по ракетам типа «Гарпун» и «Томагавк». Разрешающая способность при измерении дальности ΔD определяется частотой Fсинхр следования импульсов в ГСИ 18 и равна ΔD=с/2Fсинхр. Так, при Fсинхр.=10 МГц получим разрешающую способность измерения наклонной дальности ΔD=15 м. При значении f=10 кГц коэффициент деления частоты в делителе 13 должен быть К=1000, для чего используются три десятичных делителя на микросхемах.
Отметим, что в случае, когда период следования ЛЧМ-сигналов гетеродинирования в ГЛЧМ 17 кратно превышает величину 1/f (в рассматриваемом примере 1/f=100 мкс), то в составе ГЛЧМ 17, синхронизируемом частотой импульсов с выхода делителя частоты 13, должен быть предусмотрен в составе ГЛЧМ 17 дополнительный делитель частоты, например, на два, на три и т.д.
Ко второму и третьему входам персонального компьютера 25 поступают кодовые сигналы о текущих значениях азимута β и угла места ε линии визирования автосопровождаемой цели или при работе локатора в режиме обнаружения цели. Автоматическое наведение линии визирования на движущуюся цель общеизвестно и выходит за рамки данной заявки. Поэтому действие блока измерения азимута и угла места цели 27 в данном техническом решении не рассматривается.
По измеренным угловым координатам цели и значению наклонной дальности легко находятся координаты цели, высота полета ракеты и ее истинная скорость, что позволяет решить задачу о моменте противодействия ракете заградительным огнем скорострельных корабельных (или наземных) зенитных орудий.
Рассмотрим процедуру выделения сигналов управления (сигналов ошибки систем авторегулирования) азимутальным и угломестным приводами с помощью блока управления приводами 31, связанного двунаправленной шиной передачи информации с персональным компьютером 25. В режиме обнаружения цели по программе, задаваемой персональным компьютером 25 (возможен также режим ручной настройки) происходит сканирование приемно-передающего оптического тракта локатора по азимуту и углу места. Когда цель найдена, оптическое излучение от нее собирается приемным объективом 10 и в фокальной плоскости объектива, с которой совмещена фоточувствительная площадка КРТ фотоприемного устройства 11, образуется освещенная зона в виде диска Эйри 36 (рис. 3), расположение которого на этой площадке определяется точностью совмещения на цель оптических осей приемно-передающего оптического тракта. Положение этих взаимно коллинеарных оптических осей изменяется азимутальным и угломестным механическими приводами с датчиками азимута и угла места в составе блока 30. Для центровки диска Эйри относительно фоточувствительной площадки последняя разделена на четыре квадранта, электрически не зависимых друг от друга, и вся площадка представляет собой четыре одинаковых по параметрам фоточувствительных приемника 32…35, как это показано на рис. 3. По сигнальному тракту образующиеся спектральные компоненты, как результат гомодинного преобразования в ФПУ 11, суммируются со всех четырех площадок в сумматоре 43 и затем воздействуют на усилители 15 канала измерения радиальной скорости и 26 канала измерения наклонной дальности.
Для формирования корректирующих сигналов управления азимутального и угломестного каналов в процессе автосопровождения цели используются две цепи, каждая из которых состоит из пары двухвходовых сумматоров 37 и 38 и разностного устройства 39 - в азимутальном канале и сумматоров 40 и 41 и разностного устройства 42 - в угломестном канале, которые в разных сочетаниях соединены в четырьмя площадками 32…35 ФПУ 11, как это представлено на рис. 3.
Сигналы ошибки оказываются равными нулю при центральном расположении диска Эйри на светочувствительной площадке. При отклонениях диска Эйри от центра на выходах устройств разности 39 и 42 возникают ненулевые сигналы управления (коррекции) того или иного знака. На рис. 3 видно, что для центровки диска Эйри следует несколько переместить оптические оси приемно-передающего оптического тракта локатора влево по азимуту и вниз по углу места, учитывая, что объектив формирует действительную, уменьшенную и перевернутую картину в плоскости изображений.
Строго говоря, изображение точечного объекта - ракеты, расположенной на расстоянии D, много большем фокусного расстояния FОБ приемного объектива, практически совпадает с фокальной плоскостью приемного объектива. Лоцируемый объект считается точечным по эмпирическому критерию Релея (дифракционно ограниченным) при длине волны лазерного излучения λ=10,6 мкм, если D>dDОБ/2,44λ (м), где d и DОБ - соответственно диаметры ракеты и апертуры приемного объектива [30]. Для противокорабельной ракеты «Гарпун» d=0,34 м и при DОБ=0,3 м получаем D>3,94 км. Для ракеты «Томагавк» с ядерным зарядом и дальностью полета до 2500 км с диаметром d=0,53 м при той же апертуре приемного объектива DОБ такая ракета воспринимается точечной при расстояниях D>6,15 км. Это следует учитывать в расчетах энергетики, то есть в случае, когда величина D становится меньше указанных значений дальности, то есть когда объект не является дифракционно ограниченным. Иначе говоря, изображение становится больше размера диска Эйри и несколько сдвигается относительно фокальной плоскости приемного объектива вдоль оптической оси в соответствии с формулой тонкой линзы (1/D)+(1/h)=1/FОБ, где h>FОБ - расстояние от линзы до ее плоскости изображений [32]. Так, при D=3 км и FОБ=0,6 м получаем сдвиг всего на h-FОБ=0,12 мм.
Биполярные сигналы постоянного тока с устройств разности 39 и 42 используются как корректирующие в системах авторегулирования статического или астатического типа в составе азимутальных и угломестных приводов.
Азимутально-угломестные приводы 31 могут управлять положением поворотного зеркала, не указанного на рис. 1, по двум угловым координатам - азимуту и углу места, для чего важно совместить оптические оси передающего телескопа 8 и приемного объектива 10 - цели данного технического решения.
Модификацией заявляемого устройства является локатор с матричным фотоприемником и многоканальной обработкой на ДЛЗ. Аналогичные решения предложены автором в работах [28-31].
Кроме того, особый интерес представляют лазерные доплеровские локаторы с непрерывным и немодулированным излучением, обладающие способностью к измерению радиальной скорости и наклонной дальности низколетящих ракет морского базирования («Гарпун», «Томагавк» и др.), использующие прием рассеянного излучения от этих ракет от бликов морской поверхности [32-38], что максимизирует энергетический потенциал таких локаторов. Это является ответом на американскую программу «Стелс» по созданию «невидимых» летательных аппаратов. При этом следует указать, что береговые триангуляционные системы на основе доплеровских локаторов не всегда могут осуществить боевую работу на больших дальностях на море. Поэтому использование таких локаторов (по бликовым переотражениям от морской поверхности) непосредственно на сторожевых кораблях при их значительном удалении от береговой линии является весьма перспективным.
Важно отметить, что использование заявляемого лазерного локатора и его модификаций, позволяющих измерять радиальную скорость и наклонную дальность без использования ВНЕШНЕГО ЭЛЕКТРООПТИЧЕСКОГО МОДУЛЯТОРА излучений, в частности без использования внешних электрооптических модуляторов треугольных ЛЧМ сигналов, во-первых, существенно упрощает аппаратуру локатора, а во-вторых, значительно повышает его энергетический потенциал, поскольку во внешних модуляторах теряется значительная мощность лазерного излучения. От этого недостатка свободно заявляемое техническое решение.
Заявляемое техническое решение целесообразно использовать применительно к средствам противоракетной обороны в акватории Крымского побережья на Черном море и вблизи Калининграда на Балтике, где предполагается сосредоточить средства ракетно-ядерного нападения вероятного противника от стран НАТО, оснащенные ракетами «Гарпун» и «Томагавк». Последняя имеет большую дальность действия и может содержать ядерный заряд большой разрушающей силы.
Литература
1. Лазерная локация. Под ред. Н.Д. Устинова, М.: Машиностроение, 1984.
2. Протопопов В.В., Н.Д. Устинов. Инфракрасные лазерные локационные системы М.: Воениздат, 1987.
3. Измерение спектро-частотных и корреляционных параметров и характеристик лазерного излучения. Под ред. А.Ф. Котова и Б.М. Степанова. М.: Радио и связь, 1982.
4. Кук Ч., Бернфельд М. Радиолокационные сигналы. Пер. с англ. Под ред. В.С. Кильзона, М.: Сов. радио, 1971.
5. Фильтры на поверхностных акустических волнах. Под ред. Г. Мэттьюза. М.: Сов. радио, 1981, 472 с.;
6. Тверской В.И. Дисперсионно-временные методы измерения спектров радиосигналов. М.: Сов. радио, 1974, 240 с.
7. Джек А.А., Грант П.М., Коллинз Дж.Х. Теория проектирования и применение Фурье-процессоров на поверхностных акустических волнах. ТИИЭИР, 1980, №4, р. 22-43.
8. Меньших О.Ф. Формирователь сложных линейно-частотно-модулированных сигналов. Авт. свид. СССР №1302987, 1985.
9. Меньших О.Ф. Способ анализа спектра сигналов. Авт. свид. СССР, №1817554, 1988.
10. Меньших О.Ф. Измеритель частоты сигналов лазерного доплеровского локатора. Авт. свид. СССР №1621728 и Авт. свид. СССР №1621729, 1988.
11. Меньших О.Ф. Спектроанализатор лазерного доплеровского локатора. Авт. свид. СССР №1595219, 1988.
12. Меньших О.Ф. Лазерный доплеровский локатор. Авт. свид. СССР №1741553, 1990.
13. Меньших О.Ф. Способ обнаружения детерминированного радиосигнала. Авт. свид. СССР №1828280, 1991.
14. Меньших О.Ф. Обнаружитель лазерного доплеровского локатора. Авт. свид. СССР №1805756 и №1829640, 1991.
15. Меньших О.Ф. Устройство для частотной модуляции лазера. Авт. свид. СССР №1373188, 1985.
16. Меньших О.Ф. Способ измерения кратковременной стабильности частоты излучения газового лазера. Авт. свид. СССР №1554719, 1987.
17 Меньших О.Ф. Обнаружитель моноимпульсного сигнала. Патент РФ №2046370, 1992.
18. Меньших О.Ф. Согласованный фильтр. Патент РФ №2016493, 1994.
19. Левин Б.Р. Теоретические основы статистической радиотехники. М.: Сов. радио, 1974, кн. 1 и 2.
20. Тихонов В.И. Оптимальный прием сигналов. М.: Радио и связь, 1983, 320 с.
21. Меньших О.Ф. Ультразвуковой микроскоп, Патент РФ №2270997, №6, 2006.
22. Меньших О.Ф. Устройство для измерения динамических характеристик пьезо-корректора лазера, Авт. свид. СССР №1630585, 1988.
23. Меньших О.Ф. Способ измерения базы дисперсионных линий задержки. Авт. свид. СССР №1574036, 1988.
24. Меньших О.Ф. Устройство для измерения кратковременной стабильности частоты излучений газовых лазеров. Авт. свид. СССР №1556291, 1988.
25. Меньших О.Ф. Устройство автоподстройки частоты лазерного доплеровского локатора. Авт. свид. СССР №1591675, 1988.
26. Меньших О.Ф. Устройство для измерения вариации частоты лазерного излучения в системе связанных лазеров. Авт. свид. СССР №1621732, 1988.
27. Меньших О.Ф. Лазерный локатор Патент РФ №2456636, опубл. в бюлл. №20 от 20.07.2012 (прототип).
28. Меньших О.Ф. Лазерный доплеровский локатор, Патент РФ №2335785, 2008.
29. Меньших О.Ф. Лазерный когерентный локатор, Патент РФ №2352958, 2009.
30. Меньших О.Ф. Способ лазерного гетеродинного приема излучений. Патент РФ №2349930, 2009.
31. Меньших О.Ф. Способ обработки информации в лазерном когерентном локаторе с матричным фотоприемником. Патент РФ №2354994, 2009.
32. Меньших О.Ф. Способ локации, Патент РФ №2296350, 2007.
33. Меньших О.Ф. Способ обнаружения низколетящих ракет морского базирования. Патент РФ №2422852, 2011.
34. Меньших О.Ф. Прибор для статистического исследования распределения энергии бликовых переотражений лазерного излучения от морской поверхности. Патент РФ №2422853, 2011.
35. Меньших О.Ф. Устройство для регистрации статистического распределения групповых бликовых отражений лазерного излучения морской поверхностью. Патент РФ №2449313, 2012.
36. Меньших О.Ф. Способ регистрации статистического распределения переотражений лазерного излучения от низколетящей ракеты бликами морской поверхности и устройство для его реализации Патент РФ №2451301, 2012.
37. Меньших О.Ф. Имитатор бликовых переотражений лазерного излучения морской поверхностью. Патент РФ №2451302, 2012.
38. Меньших О.Ф. Имитатор морской поверхности для статистического исследования распределения морских бликов при работе лазерных доплеровских локаторов по низколетящим ракетам. Патент РФ №2488138, 2013.
Источники патентной информации
Лазерный когерентный локатор использует излучение одночастотного CO2-лазера в режиме гетеродинного приема отраженных излучений от лоцируемого объекта. В локаторе используется фотоприемное устройство с четырехквадрантным фоточувствительным слоем. Четыре электрически между собой не связанных элемента фотоприемного устройства образуют два суммарно-разностных канала. Каналы используются для подстройки азимутального и угломестного положения взаимно коллинеарных оптических осей передающего телескопа и приемного объектива. Принимаемое излучение располагается симметрично по центру относительно всех четырех квадрантов фотоприемного устройства. Передающий телескоп установлен в центральном отверстии приемного объектива и снабжен двумя наклонными зеркалами. Технический результат - упрощение конструкции. 3 ил.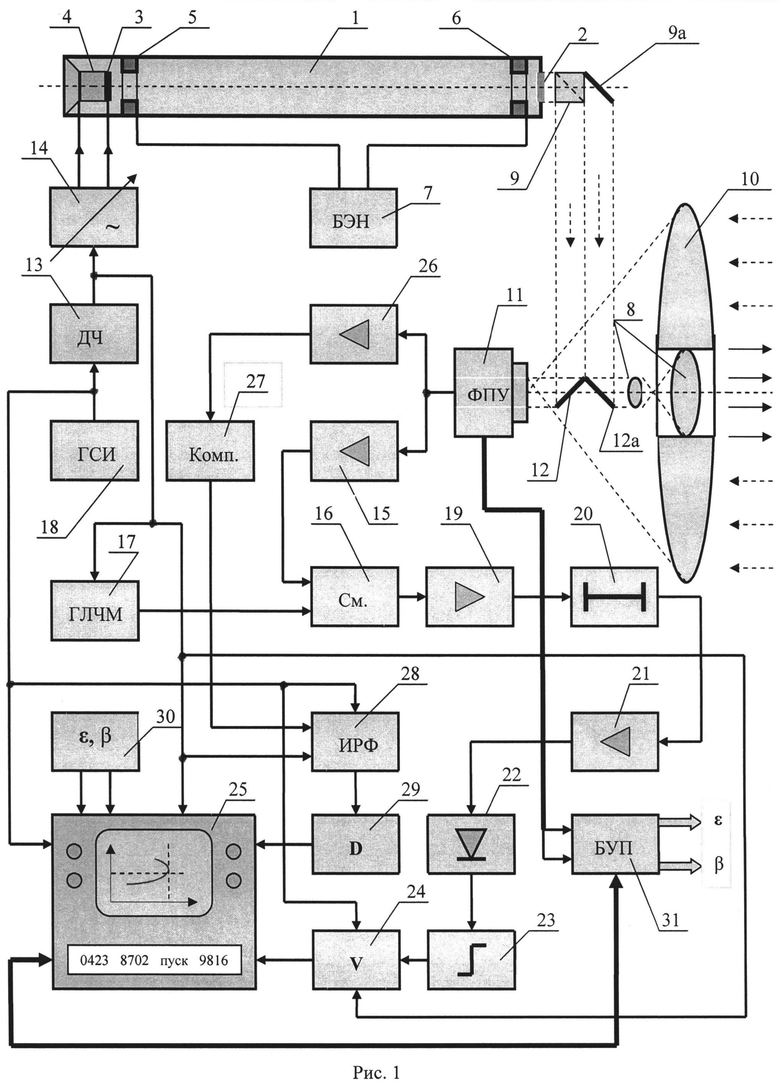
Лазерный когерентный локатор для ракет морского базирования, содержащий одночастотный CO2-лазер непрерывного действия с блоком электронной накачки, передающий телескоп, приемный объектив, фотоприемное устройство, работающее в гомодинном режиме фотосмешения, подключенный к последовательно связанному малошумящему высокочастотному широкополосному усилителю, смеситель, ко второму входу которого подключен генератор линейно-частотно-модулированного импульсного сигнала, синхронизируемого от высокочастотного генератора синхроимпульсов через делитель частоты, широкополосный усилитель, подключенный согласованным фильтром на дисперсионной линии задержки с компенсирующим потери широкополосным усилителем, амплитудный детектор, пороговое устройство, блок измерения радиальной скорости, второй вход которого подключен к выходу делителя частоты, третий его вход подключен к выходу высокочастотного генератора синхроимпульсов, а выход - с первым входом персонального компьютера с дисплеем и пультом управления, ко второму и третьему входам которого подключен блок датчиков измерения азимута и угла места цели, установленных в приемно-передающем модуле с блоком управления азимутальным и угломестным приводами, а также включающий канал измерения дальности до цели на основе установки в оптический резонатор одночастотного СО2-лазера непрерывного действия пьезоэлектрического корректора, связанного механически с глухим отражателем оптического резонатора, а также последовательно соединенных измерителя разности фаз низкочастотного модулирующего сигнала управления пьезоэлектрическим корректором и блока измерения дальности, подключенного к четвертому входу персонального компьютера, к пятому входу которого подключен выход высокочастотного генератора синхроимпульсов, выход фотоприемного устройства дополнительно соединен с последовательно включенными низкочастотным резонансным усилителем, компаратором, измерителем разности фаз, ко второму входу которого подключен выход делителя частоты, входом соединенного с выходом высокочастотного генератора синхроимпульсов, выход которого также подключен к третьему входу измерителя разности фаз; низкочастотный сигнал с выхода делителя частоты синхронизирует работу генератора переменного напряжения, подключенного в резонансную цепь с пьезоэлектрическим корректором одночастотного CO2-лазера и регулируемого по амплитуде колебаний, модулирующих частоту лазерного излучения в диапазоне его одной моды (ширины контура усиления); причем фотоприемное устройство выполнено четырехквадрантным, выходы каждого из равновеликих квадрантов, попарно образующие азимутальные и угломестные суммарно-разностные каналы соединены с двумя входами блока управления приводами - азимутальным и угломестным, а блок управления приводами двунаправленно связан информационной шиной управления с персональным компьютером, к шестому входу которого подключен выход делителя частоты высокочастотного генератора синхроимпульсов, отличающийся тем, что дополнен двумя наклонно установленными зеркалами, оптически связывающими оптический выход одночастотного CO2-лазера с передающим телескопом, установленным в центральном отверстии приемного объектива.
| ЛАЗЕРНЫЙ ЛОКАТОР | 2011 |
|
RU2456636C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| ИМИТАТОР БЛИКОВЫХ ПЕРЕОТРАЖЕНИЙ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ МОРСКОЙ ПОВЕРХНОСТЬЮ | 2011 |
|
RU2451302C1 |
| WO 2000072046 A1, 30.11.2000 | |||
| US 5157257 A1, 20.10.1992 | |||

