Изобретение относится к области приборостроения и может быть использовано при разработке лазерных локационных систем морского базирования для обнаружения низколетящих крылатых ракет.
По признанию начальника кораблестроения вице-адмирала ВМФ России, «корабли и катера Черноморского флота, участвовавшие в морской части операции по принуждению Грузии к миру, имели на своем борту устаревшие радиоэлектронные средства обнаружения, так как они строились еще в 80-х годах прошлого столетия». Поэтому нападение кораблей Грузии, оснащенных низколетящими крылатыми ракетами типа «Гарпун», было отражено в августе 2008 года потоплением одного из грузинских кораблей на расстоянии 15 км от района дислокации наших кораблей у берегов Абхазии, поскольку на наших кораблях не было лазерных локационных средств ближнего обнаружения и автоматического сопровождения низколетящих ракет, разработка которых в 80-х годах прошлого столетия в СССР завершилась провалом на завершающей ее стадии. Низколетящие крылатые ракеты типа «Гарпун» производства США были впервые успешно применены Аргентиной против английского корабля в военном конфликте в районе Фолклендских (Мальвинских) островов и проявили себя как грозное оружие. Поэтому задача ближнего обнаружения низколетящих крылатых ракет типа «Гарпун» является весьма актуальной.
Среди различных схем и способов построения лазерных локаторов наиболее перспективными представляются схемы с когерентным приемом при панорамном обзоре пространства с использованием непрерывного излучения одночастотного лазера без использования модуляции, что позволяет получить наибольшую величину произведения энергетического потенциала локатора на его быстродействие сканирования по угловым координатам (азимуту и углу места) при высокой точности измерения угловых координат и радиальной скорости. Последнее обеспечивается при построении лазерных доплеровских систем с использованием когерентной обработки с фотосмешением в высокочувствительных фотоприемниках, например, на основе охлаждаемых жидким азотом тройных соединений «кадмий-ртуть-теллур» (КРТ) для излучений CO2-лазеров. Однако для измерения наклонной дальности в лазерных локаторах традиционно используют либо импульсный режим излучения, либо применяют широкополосные сигналы, например, псевдослучайные последовательности или линейно-частотно-модулированные по треугольному закону сигналы с последующей их оптимальной обработкой в радиотракте на основе дисперсионных линий задержки или линий с длительным взаимодействием [1-10]. Важно отметить, что при построении лазерных локаторов с импульсным режимом излучения приходится использовать модуляторы излучения, что снижает энергетический потенциал таких локаторов по сравнению с когерентными доплеровскими локаторами с непрерывным режимом излучения при одинаковых средних мощностях лазеров.
Известен способ локации низколетящих крылатых ракет морского базирования, использующий непрерывное излучение одночастотного газового CO2-лазера, сформированное с узким углом расходимости по азимуту и расширенным углом излучения по углу места, и когерентный прием матрицей фоточувствительных КРТ-элементов переотраженных от морских бликов рассеянного ракетой излучения [11], а также реализующие данный способ устройства и их элементы [12-18]. Эффективная поверхность рассеяния (ЭПР) крылатых ракет является настолько малой из-за стреловидной формы их корпуса, что их обнаружение по отражению вдоль линии зондирования затруднено, поскольку основная часть энергии отражения направляется корпусом ракеты в направления, отличные от направления зондирования, в том числе на морскую поверхность вблизи от ракеты. Это обстоятельство используется в указанном известном способе локации. При этом морская поверхность, практически всегда испытывающая волнение, представляет собой псевдослучайный время-пространственный модулятор-отражатель рассеянного ракетой излучения, воздействующего со стороны лазерного доплеровского локатора.
Недостатком известного способа, рассматриваемого в качестве прототипа заявляемого способа, является кратковременность бликовых переотражений в условиях быстрого движения ракеты (ракета «Гарпун» летит со скоростью 300 м/с на высоте от поверхности моря около 10 м), что снижает энергетику принимаемых сигналов бликовых переотражений, каждый из которых обрабатывается раздельно. Последнее также увеличивает сложность блока обработки принимаемых сигналов матричным фотоприемником с большим количеством фоточувствительных элементов.
Указанный недостаток устраняется в заявляемом техническом решении.
Целями изобретения являются упрощение конструкции реализующего способ устройства и обеспечение автосопровождения ракеты по угловым координатам.
Указанная цель достигается в заявляемом способе обнаружения низколетящих крылатых ракет морского базирования, основанном на приеме бликовых переотражений морской поверхностью рассеянного корпусом ракеты излучения лазерного локатора непрерывного действия, отличающемся тем, что обработку сигналов переотражений от морских бликов производят четырехсекторным фотоприемником, работающим в режиме гетеродинного (когерентного) приема, приходящие переотраженные бликовые излучения на которые суммируют по каждой из четырех равновеликих пространственных зон морской поверхности, выходные сигналы каждого из четырех секторных фотоприемников фильтруют в широкополосных полосовых фильтрах составляющих доплеровских смещений частоты зондирующего лазерного излучения, а затем подвергают спектровременному преобразованию с помощью дисперсионных ультразвуковых линий задержки и гетеродинирования исходных широкополосных сигналов, образующихся на выходах широкополосных полосовых фильтров, на основе единого линейно-частотно-модулируемого генератора, отклики дисперсионных ультразвуковых линий задержки используют для формирования сигналов управления сканированием лазерного локатора по угловым координатам - по азимуту и углу места, а также суммируют, а полученный суммированием сигнал используют в качестве фактора обнаружения низколетящей крылатой ракеты и для принятия решения об ее уничтожении заградительным огнем бортовой артиллерии корабля по мере приближения к последнему ракеты на заданное допустимое расстояние, которое определяют по заданному максимальному повороту линии зондирующего излучения лазерного локатора по углу места относительно исходной линии визирования.
Достижение указанных целей изобретения объясняется повышенной энергетикой принимаемых сигналов за счет одновременной обработки всех бликовых переотражений видимой части морской поверхности, сопряженной с движущейся ракетой, и способностью выделения сигналов ошибки управления сканированием линии зондирования локатора по угловым координатам - азимуту и углу места - за счет раздельной обработки сигналов от четырех секторов фотоприемника с последующим сравнением амплитуд сигналов в каждой из двух пар сигналов - азимутально ориентированной и угломестно ориентируемой парах.
Действие заявляемого способа рассмотрим на примере реализующего его устройства, блок-схема которого изображена на фиг.1, состоящая из следующих узлов и блоков (включающая внешние атрибуты - крылатую ракету и морскую поверхность):
1 - одночастотный СО2-лазер непрерывного действия,
2 - приемопередающий объектив,
3 - светоделительная пластина,
4 - отражатель гетеродинного канала,
5 - четырехсекторный КРТ фотоприемник (оптический смеситель),
6, 7, 8 и 9 - блоки обработки сигналов четырехсекторного фотоприемника,
10 и 11 - сумматоры-усреднители канала угломестного управления,
12 и 13 - сумматоры-усреднители канала азимутального управления,
14 - вычитатель канала угломестного управления,
15 - вычитатель канала азимутального управления,
16 - угломестный сканер с измерением угла места α,
17 - азимутальный сканер с измерением азимута β,
18 - четырехвходовой сумматор совокупного сигнала,
19 - усреднитель бликовых сигналов со сбросом,
20 - пороговое устройство (ограничитель по заданному уровню),
21 - решающее устройство,
22 - низколетящая крылатая ракета морского базирования,
23 - морская поверхность (псевдослучайный времяпространственный модулятор-отражатель).
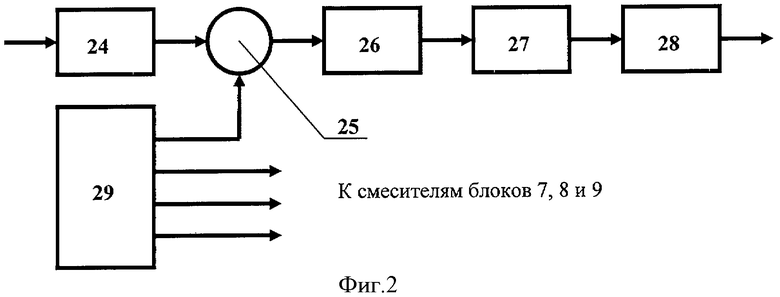
На фиг.2 представлена блок-схема одного из блоков обработки сигналов четырехсекторного фотоприемника 6 (7, 8 или 9), который состоит из следующих узлов:
24 - малошумящий усилитель сигналов с соответствующего сектора фотоприемника,
25 - смеситель,
26 - широкополосный полосовой усилитель,
27 - дисперсионная ультразвуковая линия задержки (ДУЛЗ),
28 - амплитудный детектор,
29 - общий для всех блоков 6…9 линейно-частотно-модулированный гетеродин, согласованный с параметрами ДУЛЗ 27.
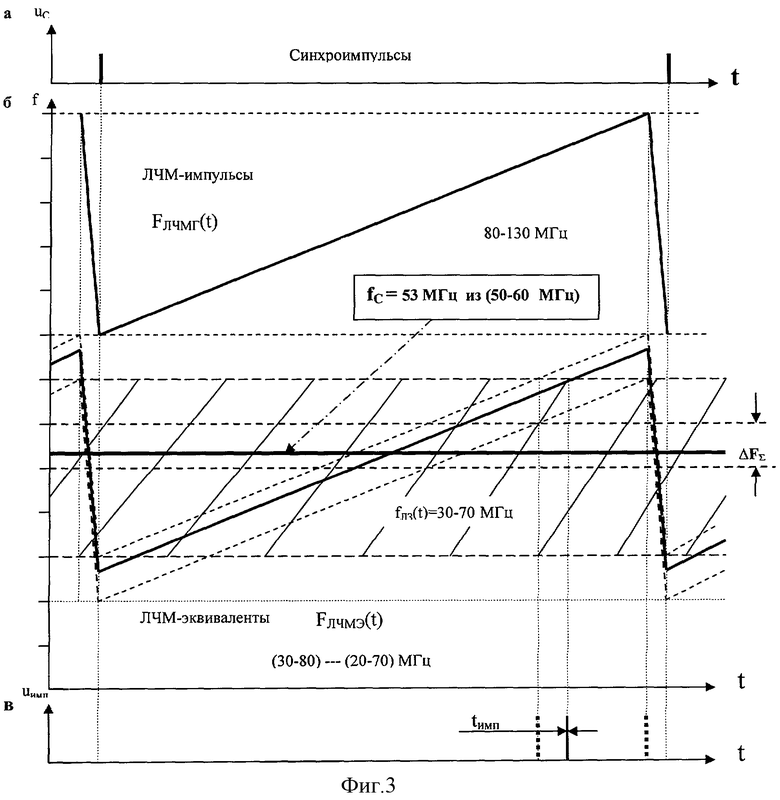
На фиг.3 представлен графически принцип обработки ЛЧМ-сигналов, образующихся на выходе смесителя 25 в блоке обработки 6, с помощью ДУЛЗ 27 (то же относится к блокам обработки 7, 8 и 9). На фиг.3а указано временное положение синхроимпульсов, вырабатываемых в ЛЧМГ 29 и определяющих период формирования ЛЧМ-сигналов гетеродинирования в смесителе 25 (фиг.2). На фиг.3б представлен график временного изменения частоты гетеродинирования FЛЧМГ(t), например, в диапазоне от 80 до 130 МГц по линейному закону. Также представлено наложение графиков возможных ЛЧМ-эквивалентов, то есть сигналов, образующихся на выходе смесителя 25 (или широкополосного полосового усилителя 26) с частотами FЛЧМЭ(t) из диапазона (30-80 МГц)…(20-70 МГц), и полосы пропускания ДУЛЗ 27 ΔFЛЗ=40 МГц (от 30 до 70 МГц) при частоте сигналов от фотоприемника 5 (фиг.1) в диапазоне fC=50-60 МГц. Сплошной горизонтальной линией показан входной сигнал частоты fC=53 МГц (один из многих компонент бликовых сигналов). Сигнал ЛЧМ-эквивалент для частоты выходного сигнала фотоприемника fC=53 МГц на фиг.3б показан жирной ломаной линией, а пределы его вариации показаны пунктирными линиями. На фиг.3в представлено сплошной вертикальной линией временное положение сжатого импульса-отклика на выходе ДУЛЗ 27 для сигнала частоты fC=53 МГц, а двумя пунктирными - граничные временные положения этих импульсов-откликов для крайних частот диапазона fC=50-60 МГц. Таким образом, временное положение импульсов-откликов на выходе ДУЛЗ однозначно определяют частоту выходного сигнала фотоприемника. Амплитуда этих импульсов-откликов определяется мощностью бликовых сигналов, действующих на четырехсекторный фотоприемник, так и их длительностью при заданных параметрах ДУЛЗ 27 - длительности импульсной характеристики τЛЗ и полосы пропускания ΔFЛЗ, произведение которых называют базой ДУЛЗ В=ΔFЛЗτЛЗ, определяющей качество временной компрессии сигналов ЛЧМ-эквивалентов. В частности, за счет спектро-временного «сжатия» обеспечивается повышение отношения сигнал/шум в (В)1/2 раз.
Работа устройства (фиг.1), реализующего заявляемый способ, заключается в формировании непрерывного излучения одночастотного СО2-лазера 1 приемным объективом 2 со сферически-цилиндрическими линзами, диаграмма которого является максимально узкой в азимутальной плоскости и уширенной в угломестной плоскости, что позволяет производить обнаружение в режиме кругового обзора только по азимуту. При небольшой высоте полета крылатых ракет типа «Гарпун» (порядка 10 м) над уровнем моря и при максимальной дальности обнаружения порядка 10 км наибольшая ширина излучения по углу места имеет порядок 1-1,5 мрад. При попадании на ракету такого излучения происходит его рассеяние боковой поверхностью корпуса ракеты 22, в частности, на морскую поверхность 23. Последняя всегда имеет определенное волнение, что позволяет выделить на ней участки, представляющие собой отражающие квазизеркально поверхности, от которых излучение вновь воздействует на приемный объектив локатора и далее на четырехсекторный КРТ фотоприемник 5. Кроме того, на поверхность последнего поступает часть лазерного излучения в качестве фотогетеродинного с помощью светоделительной пластины 3 и отражателя гетеродинного канала. Оптические сигналы от морских бликов имеют частоты, отличающиеся от зондирующего излучения лазера 1 на величины доплеровских смещений с учетом радиальной скорости движения крылатой ракеты 22 и углов переотражения зондирующего излучения гранями корпуса ракеты. На выходах секторов фотоприемника 5 образуются сигналы «биений» с указанными частотами доплеровских сдвигов, которые на фиг.3б обозначены как fC.
Выделенные на выходах четырехсекторного фотоприемника электрические сигналы поступают соответственно на блоки обработки 6, 7, 8 и 9, которые имеют идентичную структуру и общий для них ЛЧМГ 29 (фиг.2). Рассмотрим работу блока 6.
Сначала сигнал с фотоприемника поступает на малошумящий усилитель 24 с полосой пропускания, соответствующей разбросу доплеровских сдвигов частоты вблизи дислокации крылатой ракеты 22 над морской поверхностью 23, которая определяется априорными статистическими исследованиями. Затем усиленные сигналы с частотами fC для совокупности бликов для данного сектора фотоприемника 5 преобразуются в смесителе 25 в соответствующую группу ЛЧМ-эквивалентов с помощью линейно-частотно-модулированного генератора (ЛЧМГ) 29, вырабатывающего периодическую последовательность ЛЧМ-сигналов гетеродинирования (см.фиг.3б). Выделенная группа ЛЧМ-эквивалентов усиливается в широкополосном полосовом усилителе 26 и поступает на ДУЛЗ 27, в котором происходит спектровременное «сжатие» ЛЧМ-эквивалентов с выделением на выходе ДУЛЗ 27 коротких радиоимпульсов (по числу одновременно принятых бликовых сигналов в данном секторе фотоприемника за период следования сигналов ЛЧМГ 29). Эти радиоимпульсы имеют длительность порядка 1/ΔFЛЗ, что приводит к значительному увеличению их амплитуды над уровнем шума. После амплитудного детектирования этих радиоимпульсов в амплитудном детекторе 28 полученные видеоимпульсы поступают на выход рассматриваемого блока обработки.
С целью выделения сигналов ошибки регулирования положением зондирующего излучения по углу места α сканером 16 и по азимуту β сканером 17 выходные сигналы с блоков обработки 6, 7, 8 и 9 группируются в четырех сумматорах-усреднителях 10, 11, 12 и 13 соответственно угломестного и азимутального каналов. Нетрудно понять, что указанное на фиг.1 соединение выходов блоков обработки 6, 7, 8 и 9 с сумматорами-усреднителями 10, 11, 12 и 13 позволяет получить раздельно совокупные сигналы для правой и левой половин четырехсекторного фотоприемника 5 применительно к азимутальному каналу и совокупные сигналы для верхней и нижней половин четырехсекторного фотоприемника 5 применительно к угломестному каналу,
Поскольку статистические исследования дислокации бликовых отражений рассеянного ракетой зондирующего излучения позволяют считать равновероятным распределение энергии бликов (поэтому морская поверхность может рассматриваться в качестве псевдослучайного время-пространственного модулятора-отражателя), с учетом усреднения сигналов в блоках 10, 11, 12 и 13 (например, с помощью инерционных звеньев) можно считать, что различие средних значений сигналов на выходах блоков 10 и 11 означает разбаланс линии зондирования по углу места, а различие средних значений сигналов на выходах блоков 12 и 13 означает разбаланс линии зондирования по азимуту относительно точного положения линии визирования локатором крылатой ракеты.
С помощью вычитателя канала угломестного управления 14, в котором сравниваются (вычитанием) сигналы с выходов сумматоров-усреднителей 10 и 11, получают сигнал ошибки регулирования по углу места, а с помощью вычитателя канала азимутального управления 15, в котором сравниваются (также вычитанием) сигналы с выходов сумматоров-усреднителей 12 и 13, получают сигнал ошибки регулирования по азимуту, и эти сигналы ошибки поступают соответственно на угломестный 16 и азимутальный 17 сканеры, которые также измеряют текущие значения углов линии зондирования по углу места α и азимуту β. Это позволяет автоматически сопровождать движущуюся крылатую ракету 22 после ее обнаружения в режиме кругового обзора по соответствующему движению картины бликовых отражений, сопряженной с текущим положением крылатой ракеты.
С другой стороны, все четыре выхода блоков 6, 7, 8 и 9 суммируют в четырехвходовом сумматоре совокупного сигнала 18 для повышения достоверности фактора обнаружения крылатой ракеты 22. Выходной сигнал блока 18 содержит все «сжатые» видеоимпульсы, которые были приняты фотоприемником 5 за период ЛЧМГ 29 от морских бликов. Пачка этих импульсов поступает на усреднитель бликовых сигналов со сбросом 19. Амплитуда усредненного сигнала, превышающая некоторый установленный пороговый уровень, указывает на факт обнаружения цели (S=1), если же она ниже этого уровня, можно считать, что обнаружения не произошло (S=0). В последнем случае локатор вновь переходит в режим сканирования по азимуту (режим обзора). Пороговое ограничение сигнала, образующегося на выходе усреднителя бликовых сигналов 19, осуществляется пороговым устройством 20. Уровень ограничения в нем задается из заданной вероятности ложных тревог по широко известной методике. Сброс сигнала в блоке 19 производится, когда хотя бы на одном из дополнительных выходов вычитателей 14 и 15 сигнал полностью отсутствует (сигнал ошибки равен нулю) для статической системы авторегулирования, либо, наоборот, чрезмерно велик, что указывает на неустранимый сбой регулировки линии визирования цели в том или ином направлении (при этом S=0).
Информация о текущих значениях угла места α, азимута β и фактора обнаружения крылатой ракеты S поступает в решающее устройство 21, в котором принимается решение о начале действия бортовой скорострельной артиллерии в форме заградительного огня, когда ракета подойдет на заданное расстояние RO от охраняемого корабля (флагмана). Это расстояние определяется текущим углом места цели и известной высотой НО расположения приемно-передающего объектива 2 (или вынесенного вверх сканирующего отражателя) по простой тригонометрической формуле RO=HOctgΔα, где Δα - угол места цели на расстоянии RO относительно плоскости горизонта при условии, что НО>h, где h - высота полета крылатой ракеты над уровнем моря. Иначе говоря, когда угол места цели, отсчитываемый от плоскости горизонта, равен Δα=arctg(НО/RO), на выходе решающего устройства возникает сигнал начала контратаки крылатой ракеты для ее уничтожения.
Заявляемый способ обнаружения (а также автосопровождения) крылатой ракеты морского базирования является эффективным средством защиты кораблей ВМФ России от нападения на них противника. Интересно то, что локация предложенного типа не связана с необходимостью измерения текущих координат цели, то есть ее наклонной дальности, как это достигается с помощью неэффективных импульсных локаторов. Применение для решения поставленной задачи немодулированного непрерывного монохроматического и высококогерентного излучения позволяет существенно повысить энергетический потенциал локатора и дезориентировать средства лазерной разведки противника, строящего свои прогнозы на основе тактико-технических характеристик излучения и создающего по ним стратегию оптического противодействия.
Для внедрения заявляемого способа необходимо провести статистическое исследование бликовых переотражений на макете крылатой ракеты, например, ракеты «Гарпун», над уровнем прибрежного залива в летнее время года одним из предприятий Министерства оборонной промышленности России. Все остальные элементы устройства в настоящее время имеются в наличии.
Изобретение целесообразно запатентовать в основных развитых странах для продажи лицензий на образцы локаторов, основанных на использовании заявляемого способа.
Литература
1. Фильтры на поверхностных акустических волнах / под ред. Г.Мэттьюза, М.: Сов. радио, 1981, 472 с.
2. Тверской В.И., Дисперсионно-временные методы измерения спектров радиосигналов. М.: Сов. радио, 1974, 240 с.
3. Джек А.А., Грант П.М., Коллинз Дж.Х. Теория проектирования и применение Фурье-процессоров на поверхностных акустических волнах. ТИИЭИР, 1980, №4, р.22-43.
4. Меньших О.Ф. Формирователь сложных линейно-частотно-модулированных сигналов. Авт. свид. СССР №1302987, 1985.
5. Меньших О.Ф. Способ анализа спектра сигналов. Авт. свид. СССР, №1817554, 1988.
6. Меньших О.Ф. Измеритель частоты сигналов лазерного доплеровского локатора. Авт. свид. СССР №1621728, 1988.
7. Меньших О.Ф. Измеритель частоты сигналов лазерного доплеровского локатора. Авт. свид. СССР №1621729, 1988.
8. Меньших О.Ф. Спектроанализатор лазерного доплеровского локатора. Авт. свид СССР №1595219, 1988.
9. Меньших О.Ф. Лазерный доплеровский локатор. Авт. свид. СССР №1741553, 1990.
10. Меньших О.Ф. Способ обнаружения детерминированного радиосигнала. Авт. свид. СССР №1828280, 1991.
11. Меньших О.Ф. Обнаружитель лазерного доплеровского локатора. Патент РФ №1805756, 1991.
12. Меньших О.Ф. Обнаружитель лазерного доплеровского локатора. Авт. свид. СССР №1829640, 1991.
13. Меньших О.Ф. Способ локации. Патент РФ №2296350, бюлл. №9 от 27.03.2007.
14. Меньших О.Ф. Лазерный доплеровский локатор. Патент РФ №2335785, бюлл. №28 от 10.10.2008.
15. Меньших О.Ф. Лазерный когерентный локатор. Патент РФ №2352958, бюлл. №11 от 20.04.2009.
16. Меньших О.Ф. Анализатор спектра сигналов. Патент РФ №2315327, бюлл. №02 от 20.01.2008.
17. Меньших О.Ф. Рециркуляционный накопитель пачки взаимно когерентных радиоимпульсов. Патент РФ №2314638, бюлл. №01 от 10.01.2008.
18. Меньших О.Ф. Обнаружитель радиоимпульсного сигнала. Патент РФ №2310882, бюлл. №32 от 20.11.2007.
Способ основан на приеме бликовых переотражений морской поверхностью рассеянного корпусом ракеты излучения лазерного локатора непрерывного действия. Обработку сигналов переотражений от морских бликов производят четырехсекторным фотоприемником, работающим в режиме гетеродинного (когерентного) приема. Приходящие на фотоприемник переотраженные бликовые излучения суммируют по каждой из четырех равновеликих пространственных зон морской поверхности. Выходные сигналы каждого из четырех секторных фотоприемников фильтруют в широкополосных полосовых фильтрах и затем подвергают спектро-временному преобразованию с помощью дисперсионных ультразвуковых линий задержки и гетеродинирования исходных широкополосных сигналов. Отклики дисперсионных ультразвуковых линий задержки используют для формирования сигналов управления сканированием лазерного локатора по угловым координатам - по азимуту и углу места. Кроме того, их суммируют, а полученный суммированием сигнал используют в качестве фактора обнаружения низколетящей крылатой ракеты. Технический результат - обеспечение автосопровождения ракеты по угловым координатам. 3 ил.
Способ обнаружения низколетящих крылатых ракет морского базирования, основанный на приеме бликовых переотражений морской поверхностью рассеянного корпусом ракеты излучения лазерного локатора непрерывного действия, отличающийся тем, что обработку сигналов переотражений от морских бликов производят четырехсекторным фотоприемником, работающим в режиме гетеродинного (когерентного) приема, приходящие переотраженные бликовые излучения на который суммируют по каждой из четырех равновеликих пространственных зон морской поверхности, выходные сигналы каждого из четырех секторных фотоприемников фильтруют в широкополосных полосовых фильтрах составляющих доплеровских смещений частоты зондирующего лазерного излучения, а затем подвергают спектро-временному преобразованию с помощью дисперсионных ультразвуковых линий задержки и гетеродинирования исходных широкополосных сигналов, образующихся на выходах широкополосных полосовых фильтров, на основе единого линейно-частотно-модулируемого генератора, отклики дисперсионных ультразвуковых линий задержки используют для формирования сигналов управления сканированием лазерного локатора по угловым координатам - по азимуту и углу места, а также суммируют, а полученный суммированием сигнал используют в качестве фактора обнаружения низколетящей крылатой ракеты и для принятии решения об ее уничтожении заградительным огнем бортовой артиллерии корабля по мере приближения к последнему ракеты на заданное допустимое расстояние, которое определяют по заданному максимальному повороту линии зондирующего излучения лазерного локатора по углу места относительно исходной линии визирования.
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| US 4995102 А, 19.02.1991 | |||
| US 7274437 В2, 26.09.2007. | |||

