Изобретение относится к области измерительной техники и может быть использовано при разработке лазерных доплеровских локаторов применительно к низколетящим ракетам морского базирования типа «Гарпун» и аналогичных.
Известны разработки в США самолета-невидимки по проекту Stels, который был использован в военной компании в Ираке и появление которого не могли зафиксировать приграничные средства ПВО в связи с особой формой этого самолета. Эта форма в нарушение законов аэродинамики позволила существенно уменьшить эффективную поверхность отражения зондирующего радиоизлучения радаров ПВО и представляла собой зеркально отражающие грани корпуса, расположенные под углами к падающему излучению, что приводило к отражению последнего в направлениях, существенно не совпадающих с направлением падающего на самолет излучения радара (в основном вниз и по бокам относительно вектора движения самолета). Форма самолета-невидимки напоминала форму стрелы. Одним из наших ученых - Ф.Уфимцевым - разработана теория дифракции электромагнитных волн для такого рода объектов, и он сотрудничал в США в процессе создания проекта Stels, но также предложил и способ обнаружения самолетов-невидимок, сущность которого состояла в использовании нескольких радиолокационных приемных устройств, рассредоточенных в пространстве относительно радара ПВО, с помощью которых можно принимать рассеянно отраженные от самолета-невидимки излучения радара. Однако данный способ выражен в виде идеи возможного обнаружения, без конкретного указания на технические средства реализации способа и состав оборудования.
Широкое применение в военной технике на море приобрели в последние годы низколетящие ракеты морского базирования с малой поверхностью рассеяния, такие как ракета «Гарпун». Малая высота их полета над уровнем моря - до 10-20 м - существенно затрудняет их обнаружение средствами радиолокационной техники. В связи с созданием в России воздушной космической обороны с целью эффективного противодействия ударно-космическому ракетному комплексу стран НАТО, размещаемому вблизи границ России, в частности на Балтике, возникает задача обеспечения эффективной защиты противоракетных средств России от их возможной атаки низколетящими ракетами морского базирования. Поэтому велика потребность в разработке новых видов локационной техники для эффективного противодействия этому грозному оружию, а именно в разработке лазерных локационных комплексов морского базирования.
Известны способы и устройства обнаружения и автосопровождения по угловым координатам низколетящих крылатых ракет морского базирования, работа которых основана на приеме и анализе рассеянного ракетами излучения лазерных доплеровских локаторов с непрерывным режимом излучения, что позволяет с достаточно высокой точностью измерять все параметры целей, включая измерение наклонной дальности и высоты полета ракеты, что было не свойственно доплеровским локаторам прежних поколений [1-4].
Известен способ обнаружения низколетящих крылатых ракет морского базирования, основанный на приеме бликовых переотражений морской поверхностью рассеянного корпусом ракеты излучения лазерного локатора непрерывного действия, отличающийся тем, что обработку сигналов переотражений от морских бликов производят четырехсекторным фотоприемником, работающим в режиме гетеродинного (когерентного) приема, приходящие переотраженные бликовые излучения, которые суммируют по каждой из четырех равновеликих пространственных зон морской поверхности, выходные сигналы каждого из четырех секторных фотоприемников фильтруют в широкополосных полосовых фильтрах составляющих доплеровских смещений частоты зондирующего лазерного излучения, а затем подвергают спектро-временному преобразованию с помощью дисперсионных ультразвуковых линий задержки и гетеродинирования исходных широкополосных сигналов, образующихся на выходах широкополосных полосовых фильтров, на основе единого линейно-частотно-модулируемого генератора, отклики дисперсионных ультразвуковых линий задержки используют для формирования сигналов управления сканированием лазерного локатора по угловым координатам - по азимуту и углу места, а также суммируют, а полученный суммированием сигнал используют в качестве фактора обнаружения низколетящей крылатой ракеты и для принятии решения об ее уничтожении заградительным огнем бортовой артиллерии корабля по мере приближения к последнему ракеты на заданное допустимое расстояние, которое определяют по заданному максимальному повороту линии зондирующего излучения лазерного локатора по углу места относительно исходной линии визирования [5].
Исследование статистики бликовых переотражений излучения лазерного доплеровского локатора боковой поверхностью низколетящей ракеты потенциального противника имеет важное значение для оценки работоспособности рассматриваемого нового класса лазерных локаторов, функционирующих в различных погодных условиях, влияющих на степень возмущенности морской поверхности, характеризующей число, интенсивность и распределение бликов на морской поверхности в так называемом «пятне бликов», располагаемом под движущейся низколетящей ракетой. Слежение за движением этого «пятна бликов» адекватно отображает и само движение ракеты, и по текущему расположению этого «пятна бликов» можно судить о расположении ракеты, создающей это «пятно бликов», даже если отражение от самой ракеты не регистрируется приемной системой локатора из-за малой поверхности ее рассеяния и использования специальных покрытий лобовой части ракеты с целью обеспечения ее невидимости.
Ближайшим аналогом заявляемому техническому решению является предложенный заявителем прибор для статистического исследования распределения энергии бликовых переотражений лазерного излучения от морской поверхности [6], который включает одночастотный СО2-лазер непрерывного действия и матричный фотоприемник на основе охлаждаемых жидким азотом элементов «кадмий-ртуть-теллур», а также приемо-передающий объектив, формирующий излучения СО2-лазера в форме освещающего морскую поверхность пятна, принимающий переотражения от морских бликов из зоны этого пятна и фокусирующий их на матричный фотоприемник, а также устройство перемещения освещающего лазерного пятна по морской поверхности, элементы матричного фотоприемника через малошумящие усилители связаны с интеграторами, выходы которых соединены с аналоговыми запоминающими устройствами, кроме того, прибор включает последовательно соединенные генератор тактовых импульсов, двоичный счетчик, выходы разрядов которого подключены к аналоговому дешифратору, информационные входы которого связаны с выходами аналоговых запоминающих устройств, выход сигнала переполнения двоичного счетчика подключен к устройству сброса всех интеграторов и аналоговых запоминающих устройств, а выход аналогового дешифратора соединен по последовательной приемной шине с аналого-цифровым преобразователем, кодовый выход которого, а также выходы разрядов и сигнала переполнения двоичного счетчика подключены к персональному компьютеру (спецпроцессору) с монитором для запоминания и отображения на экране монитора картины бликовых переотражений с покадровым табличным указанием распределения энергии соответствующих бликовых переотражений лазерного излучения в рассматриваемой зоне морской поверхности.
Недостатком известного приборного комплекса является сложность обеспечения скрытности производимых работ от потенциального противника, систематически производящего космическую разведку особенно вблизи подобного рода комплексов. Кроме того, задача исследования может осложняться зависимостью от погодных условий в месте проведения исследований.
Указанные недостатки устранены в заявляемом техническом решении.
Целями изобретения является обеспечение скрытности исследований и их независимости от погодных условий.
Заявлен имитатор морской поверхности для статистического исследования распределения морских бликов при работе лазерных доплеровских локаторов по низколетящим ракетам, содержащий одночастотный СО2 лазер непрерывного действия с передающим телескопом, соосно размещенный в передающем канале приемный объектив, в фокальной плоскости которого установлена фоточувствительная матрица на охлаждаемых жидким азотом тройном соединении «кадмий-ртуть-теллур», работающая в гомодинном режиме когерентного приема при использовании малой части лазерного излучения и рассеивающей линзы, а также многоканальный блок обработки информации, каждый канал которого включает последовательно включенные к ячейкам фоточувствительной матрицы канальные усилитель, амплитудный детектор и пороговое устройство с регулируем порогом ограничения по минимуму, и регистрирующее устройство, например, персональный компьютер, с дисплеем, отличающийся тем, что размещен в закрытом помещении вблизи водного бассейна с устройством имитации волнения водной поверхности с регулируемыми амплитудой волн и их частотой, а также направлен на площадку визуализации бликовых переотражений зондирующего лазерного излучения, освещающего макет низколетящей ракеты, подвешенный над водным бассейном; в качестве устройства имитации волнения водной поверхности использована группа вибраторов, размещенных на различных глубинах водного бассейна и имеющих различные собственные резонансные частоты из спектра реальных волнений моря, электрически подключенных к источникам управляющих вибраторами сигналов, причем каналы многоканального блока обработки информации включают последовательно связанные с выходами канальных пороговых устройств канальные запоминающие устройства, фиксирующие длительность принятых сигналов и моменты времени начала регистрируемых интервалов времени существования принятых сигналов, а также отображающих эти временные параметры в двоичных кодах, а выходы канальных запоминающих устройств воздействуют на интерфейс регистрирующего устройства, например, персонального компьютера с дисплеем, связанного с таймером, выход таймера подключен к дополнительным входам канальных запоминающих устройств, которые включают последовательно связанные измеритель временного интервала действия принимаемого сигнала и кодирующее устройство, а интерфейс персонального компьютера включает быстродействующее устройство последовательного опроса кодовых данных канальных запоминающих устройств.
Достижение указанных целей использованием закрытого помещения и имитацией волнения поверхности водного бассейна с помощью управляемых вибраторов, позволяющей независимо от внешних погодных условий имитировать волнение поверхности водного бассейна, соответствующее различному волнению морской поверхности - от штиля до бури, что определяется работой группы вибраторов, погруженных в водный бассейн на разные глубины и имеющие различные собственные частоты колебаний из общего возможного спектра волнений морской поверхности. Возбуждение этих вибраторов осуществляется от генераторов мощных гармонических колебаний с регулируемыми выходной мощностью и частотой колебаний.
Функциональная схема заявляемого имитатора представлена на рис.1 и содержит:
1 - крытое помещение,
2 - водный бассейн,
3 - макет низколетящей ракеты (подвешен к потолку крытого помещения 1 над водным бассейном 2),
4 - приемно-передающий лазерный модуль,
5 - группа управляемых вибраторов, помещенных в водный бассейн 2,
6 - группа генераторов с регулируемыми выходной мощностью и частотой колебаний,
7 - управляющее и регистрирующее устройство (персональный компьютер),
8 - блок индикации задаваемых регулировок и отображения информации.
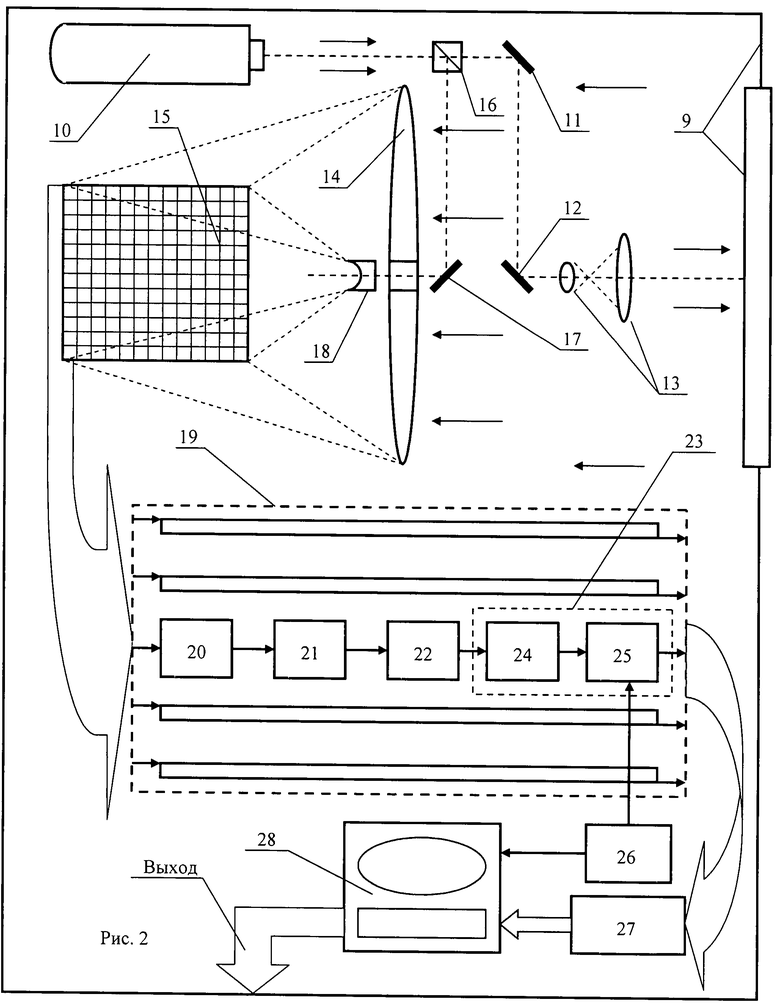
На рис.2 представлена блок-схема приемно-передающего модуля 4 с управляющим и регистрирующим устройством 7, включая блок индикации 8, которая содержит следующие узлы:
9 - корпус приемно-передающего модуля с апертурным окном,
10 - одночастотный CO2 лазер непрерывного действия,
11, 12 и 17 - глухие отражатели,
13 - передающий телескоп, формирующий узконаправленное лазерное излучение с угловой расходимостью,
14 - приемный объектив с центральным отверстием,
15 - фоточувствительная матрица с N=m n ячейками (m - число столбцов, n - число строк в матрице),
16 - оптическая делительная ячейка с малым отражением для формирования гомодинного режима фотосмешения,
18 - отрицательная линза, формирующая оптический сигнал гетеродинирования,
19 - многоканальный блок обработки информации с числом идентичных каналов N,
20 - канальный усилитель,
21 - канальный амплитудный детектор,
22 - канальное пороговое устройство с регулируемым порогом ограничения по минимуму,
23 - канальное запоминающее устройство, содержащее в своем составе:
24 - измеритель временного интервала действия принимаемого сигнала,
25 - кодирующее устройство,
26 - таймер,
27 - интерфейс регистрирующего устройства,
28 - регистрирующее устройство, например, персональный компьютер, с дисплеем,
ПРИМЕЧАНИЕ: На рис.2 фоточувствительная матрица 15 развернута для наглядности на 90° вокруг вертикальной оси, а фигурные стрелки указывают на многоканальные связи.
Рассмотрим действие имитатора.
С помощью специально составленных программ, введенных в долговременную память управляющего и регистрирующего устройства 7 (персонального компьютера) на поверхности водного бассейна 2, размещенного в крытом помещении 1, образуют волнение водной глади той или иной степени по амплитуде волн и их частоте, имитирующее различные состояния волнения морской поверхности. Это осуществляется с помощью группы вибраторов 5, управляемых с выходов группы генераторов 6 с регулируемыми выходной мощностью и частотой колебаний. Отметим, что вместо вибраторов или совместно с ними могут быть использованы и другие устройства, например, гребные винты с их двигателями. Управление этими параметрами группы генераторов 6 осуществляется с многоканального выхода персонального компьютера 7. С оптического выхода приемно-передающего лазерного модуля 4 облучается зондирующим излучением лазера подвешенный к потолку крытого помещения 1 макет низколетящей ракеты, например, типа «Гарпун». Рассеянное макетом ракеты излучение попадает на взволнованную водную поверхность водного бассейна 2 и переотражается в направлении к приемно-передающему лазерному модулю 4 от бликов на водной поверхности и обрабатывается в приемном тракте модуля 4. В результате получаемая на выходе последнего информация передается в цифровой форме на вход управляющего и регистрирующего устройства 7 (персонального компьютера) и после соответствующей переработки отображается в блоке индикации 8 и запоминается в оперативной или долговременной памяти компьютера.
Это позволяет исследовать статистику распределения бликовых переотражений от возмущенной в той или иной степени водной поверхности, освещенной рассеянным макетом ракеты лазерным излучением, в частности, установить частоту одновременного появления бликов, степень их временного перекрытия, длительности, амплитуды и частоты бликов, что в последующем учитывается при разработке лазерных доплеровских локаторов с использованием бликовых переотражений применительно к решению локационной задачи по низколетящим ракетам морского базирования. Такого рода имитаторы могут использоваться при поверке работы локаторов такого типа в процессе их наладки и паспортизации.
Рассмотрим действие приемно-передающего модуля имитатора (рис.2).
Излучение одночастотного CO2-лазера непрерывного действия 10 передающего тракта, частично отражаясь формирователем гомодинного канала - делительной оптической ячейкой 16 с большим пропусканием и малым отражением, отражаясь соответствующими глухими отражателями 11 и 12, формируется в узконаправленный пучок с угловой расходимостью Θ=1,22 λ/D1, где λ - длина волны лазерного излучения (10,6 мкм) и D1 - диаметр апертуры передающего телескопа 13, направляют на малоапертурный уголковый отражатель (не показан на рис.1), закрепленный в носовой части макета ракеты 3, закрепленной на высоте Н над водной поверхностью водного бассейна 2. Оптическая ось приемного объектива 14 приемного тракта локационного оборудования в исходном состоянии совпадает с оптической осью передающего телескопа 13. Поэтому изображение малоапертурного уголкового отражателя при его зондировании лазерным излучением, обеспечиваемым соответствующей юстировкой приемно-передающего тракта (поиском) по азимуту и углу места, оказывается совмещенным с центральной ячейкой фоточувствительной матрицы 15. Отметим, что расходимость зондирующего излучения Θ выбирается так, что выполняется неравенство ΘL<Н при всех возможных значениях дальности L, так что это излучение не воздействует на площадку 9 водной поверхности под макетом ракеты. В результате этой операции лазерное излучение падает на поверхность макета ракеты и рассеивается ею в различные направления, в том числе вниз и по бокам, то есть попадает на некоторую площадку - «пятно бликов» водной поверхности под макетом ракеты. Для визирования этой площадки приемный тракт, включающий приемный объектив 14 с центральным отверстием, отрицательную линзу 18 и глухой отражатель 17, поворачивают в угломестной плоскости на некоторый угол Δε, равный Δε=Н/L. Этот поворот осуществляют относительно горизонтальной оси, проходящей через центр глухого отражателя 17 (эта ось не показана на рис.2).
За счет волнения водной поверхности образуются бликовые отражения, воздействующие на приемный объектив 14, содержащий линзу с большой апертурой D2>>D1 и с малым центральным отверстием, в плоскости изображения которой размещена фоточувствительная матрица 15 (при L>>>F, где F - фокусное расстояние приемного объектива 14, плоскость изображений практически совпадает с фокальной плоскостью приемного объектива). Приемный тракт также содержит дополнительную малоапертурную отрицательную (рассеивающую) линзу 18 гомодинного канала, совмещенную с оптической осью приемного объектива. Гомодинное излучение образовано с помощью делительной оптической ячейки 16, глухого отражателя 17, расположенного перед отверстием в линзе приемного объектива, и формирующий гомодинный пучок падает на все m n ячейки фотоприемной матрицы 15, обеспечивая гомодинное фотосмешение. Фотоприемная матрица 15 содержит m столбцов и n строк, и их число определяет разрешающую способность устройства по угловым координатам - соответственно углу места и азимуту. Одновременно ячейки фотоприемной матрицы 15 могут регистрировать бликовые отражения от различных участков морской поверхности. Поэтому дальнейшая обработка информации о принятой группе сигналов осуществляется в многоканальном блоке обработки информации 19, число каналов в котором равно m n. Все каналы идентичны и содержат последовательно включенные канальные усилители 20, канальные амплитудные детекторы 21, канальные пороговые устройства с регулируемым порогом по минимуму 22 и канальные запоминающие устройства 23, причем последние включают последовательно соединенные измерители временных интервалов действия принимаемых сигналов 24 и кодирующие устройства 25, с помощью которых формируются коды длительности интервалов действия принимаемых сигналов и моменты текущего времени, задаваемого таймером 26, связанные с началами временных интервалов действия принимаемых сигналов. Кодирование этих величин производится, например, в двоичном коде. Опрос кодовых комбинаций со всех каналов блока обработки информации 19 осуществляется интерфейсом 27 персонального компьютера 28 с дисплеем, на который подается сигнал текущего времени с таймера 26 также в двоичном коде. С помощью персонального компьютера 28 производится по соответствующей программе обработка принимаемых кодовых последовательностей с выхода интерфейса 27, который опрашивает информацию со всех m n ячеек фотоприемной матрицы 15 с высокой скоростью. После цикла опроса кодовая информация в канальных запоминающих устройствах 23 стирается, и они готовы для последующих записей новой информации. Интервал цикла опроса всех N=m n ячеек фоточувствительной матрицы 15 выбран так, что он превышает наиболее длинный по времени интервал бликового отражения, чтобы не утратить информацию о размере этого интервала стиранием полученной кодовой информации. Например, если наиболее длинный по времени интервал действующего блика равен ΔTMAX, то время опроса каждой ячейки фоточувствительной матрицы Δt должно удовлетворять очевидному неравенству Δt≤ΔTMAX/ m n. Так, если ΔTMAX=5 мс, то при m n=105 (при m=400 и n=250) получим Δt≤50 нс. Это означает, что полоса пропускания фоточувствительных ячеек и усилителей 20 должна быть не хуже ΔF=20 МГц, что вполне согласуется с современными техническими возможностями фотоприемных устройств, например, выполненных на охлаждаемом жидким азотом соединении КРТ (кадмий-ртуть-теллур) при использовании СО2 одночастотных лазеров непрерывного действия (с длиной волны 10,6 мкм). Повышению пороговой чувствительности таких фотоприемных устройств способствует их работа в гомодинном режиме фотосмешения. Известные фотоприемные устройства на КРТ для диапазона 10,6 мкм имеют полосу пропускания порядка 100 МГц и выше, что позволяет увеличить число ячеек m n фоточувствительной матрицы 15 до 106 и выше. Это позволяет увеличить разрешающую способность устройства по угловым координатам.
Формирование кодов в кодирующих устройствах 25 должно завершаться за время порядка Δt≤50 не для рассмотренного выше примера, что также легко осуществимо. Если такт работы таймера текущего времени 26 принять равным 50 нс, то легко понять, что максимально возможный двоичный код интервала времени действия принимаемого сигнала бликового отражения имеет размер числа m n. Для рассматриваемого примера при m n=105 число двоичных разрядов для отображения интервалов времени и момента текущего времени, сопряженного с началом этого интервала времени равно k=2 log2 (m n), то есть для данного примера имеем k=34 (17 двоичных разрядов для отображения интервала времени действия сигнала и 17 разрядов для отображения момента времени начала измеряемого интервала времени). Разрядность в кодирующих устройствах 25 может быть снижена, если снизить требования по разрешающей способности по времени. Например, на порядок, то есть с временным разрешением 0,5 мкс. Тогда число разрядов в кодирующих устройствах снизится до величины k=2 log2 (m n/10)=26 (по 13 разрядов для двух измеряемых величин).
В персональном компьютере 28 происходит обработка полученной информации о времени регистрации бликовых отражений и длительности этих бликов. При этом решается вопрос, сколько бликовых отражений перекрывается по времени, какова длительность времени перекрытия для пары бликовых сигналов, для трех и более одновременно действующих бликовых отражений и каково время перекрытия для таких групп бликовых отражений (на рис.2 указано пять бликовых переотражений). Эта информация является важной для построения лазерных доплеровских локаторов, действие которых основано на заявленных ранее способах [1, 3 и 5]. Эта информация накапливается в базе данных персонального компьютера (в его жестком диске) для различных условий волнения морской поверхности - от штиля до бури, а также при разных расстояниях L.
На рис.2 для простоты не показаны органы юстировки приемного и передающего трактов локационного устройства по угловым координатам. Отметим, что повышение частоты волнений водной поверхности в известной мере компенсирует фактор неподвижности макета ракеты, поскольку при ее реальном быстром движении над поверхностью моря (для ракеты типа «Гарпун» эта скорость составляет порядка 300 м/с) существенно сокращается время действия бликовых переотражений.
Вычисление вероятности регистрации групп одновременно действующих бликовых переотражений возложено на работу персонального компьютера 28 по соответствующей программе и со статистическим усреднением получаемых измерений. Отображение информации, например, в форме графиков вероятностей, осуществляется с помощью дисплея и может быть документировано подключением принтера или плоттера.
Использование заявленного технического решения является необходимой составной частью синтеза лазерных доплеровских локаторов с высоким энергетическим потенциалом, измеряющих все существенные локационные параметры низколетящих крылатых ракет морского базирования.
Литература
1. Меньших О.Ф. Способ локации, Патент РФ №2296350, бюл. №9 от 27.03.2007;
2. Меньших О.Ф. Лазерный доплеровский локатор, Патент РФ №2335785, бюл. №28 от 10.10.2008;
3. Меньших О.Ф. Способ лазерного гетеродинного приема излучений, Патент РФ №2349930, бюл. №8 от 20.03.2009;
4. Меньших О.Ф. Лазерный когерентный локатор. Патент РФ №2352958, бюл. №11 от 20.04.2009;
5. Меньших О.Ф. Способ обнаружения низколетящих крылатых ракет морского базирования, Патент РФ №2422852, бюл. №18 от 27.06.2011;
6. Меньших О.Ф. Прибор для статистического исследования распределения энергии бликовых переотражений лазерного излучения от морской поверхности, Патент РФ №2422853, бюл. №18 от 27.06.11.
Источники патентной информации
RU 2012013 C1 30.04.1994,
RU 2152056 C1 27/06/2000,
GB 1318475 A 31.05.1973,
US 3765768 A 16.10.1973,
JP 56143974 A 10.11.1981.
Устройство может быть использовано при разработке лазерных доплеровских локаторов. Имитатор морской поверхности для статистического исследования распределения морских бликов при работе лазерных доплеровских локаторов по низколетящим ракетам содержит СO2-лазер непрерывного действия с передающим телескопом, соосно размещенный в передающем канале приемный объектив, в фокальной плоскости которого установлена фоточувствительная матрица, а также многоканальный блок обработки информации, каждый канал которого включает последовательно включенные к ячейкам фоточувствительной матрицы канальные усилитель, амплитудный детектор, пороговое и регулирующее устройство. Имитатор размещен в закрытом помещении вблизи водного бассейна с устройством имитации волнения водной поверхности и направлен на площадку визуализации бликовых переотражений лазерного излучения, освещающего макет ракеты, подвешенный над бассейном. В качестве устройства имитации волнения использована группа вибраторов, подключенных к источникам управляющих сигналов. Каналы блока обработки информации включают связанные с выходами пороговых устройств канальные запоминающие устройства, фиксирующие длительность принятых сигналов и моменты времени начала регистрируемых интервалов времени существования сигналов, а выходы запоминающих устройств воздействуют на интерфейс регистрирующего устройства, имеющего быстродействующее устройство последовательного опроса кодовых данных канальных запоминающих устройств и связанного с таймером, выход таймера подключен к дополнительным входам запоминающих устройств, которые включают измеритель временного интервала действия сигнала и кодирующее устройство. Технический результат заключается в обеспечении возможности исследования работы локаторов в независимости от погодных условий. 2 ил.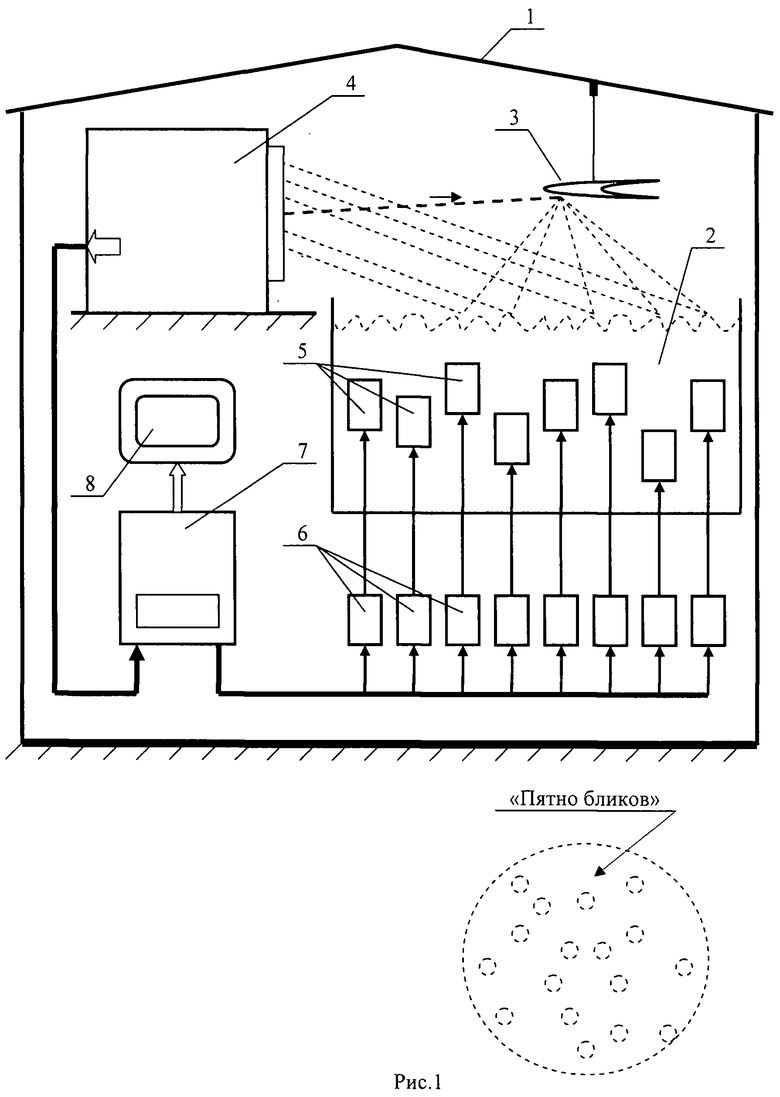
Имитатор морской поверхности для статистического исследования распределения морских бликов при работе лазерных доплеровских локаторов по низколетящим ракетам, содержащий одночастотный СO2 лазер непрерывного действия с передающим телескопом, соосно размещенный в передающем канале приемный объектив, в фокальной плоскости которого установлена фоточувствительная матрица на охлаждаемых жидким азотом тройном соединении «кадмий-ртуть-теллур», работающая в гомодинном режиме когерентного приема при использовании малой части лазерного излучения и рассеивающей линзы, а также многоканальный блок обработки информации, каждый канал которого включает последовательно включенные к ячейкам фоточувствительной матрицы канальные усилитель, амплитудный детектор и пороговое устройство с регулируемым порогом ограничения по минимуму, и регистрирующее устройство, например персональный компьютер с дисплеем, отличающийся тем, что размещен в закрытом помещении вблизи водного бассейна с устройством имитации волнения водной поверхности с регулируемыми амплитудой волн и их частотой, а также направлен на площадку визуализации бликовых переотражений зондирующего лазерного излучения, освещающего макет низколетящей ракеты, подвешенный над водным бассейном; в качестве устройства имитации волнения водной поверхности использована группа вибраторов, электрически подключенных к источникам управляющих вибраторами сигналов, причем каналы многоканального блока обработки информации включают последовательно связанные с выходами канальных пороговых устройств канальные запоминающие устройства, фиксирующие длительность принятых сигналов и моменты времени начала регистрируемых интервалов времени существования принятых сигналов, а также отображающих эти временные параметры в двоичных кодах, а выходы канальных запоминающих устройств воздействуют на интерфейс регистрирующего устройства, например персонального компьютера с дисплеем, связанного с таймером, выход таймера подключен к дополнительным входам канальных запоминающих устройств, которые включают последовательно связанные измеритель временного интервала действия принимаемого сигнала и кодирующее устройство, а интерфейс персонального компьютера включает быстродействующее устройство последовательного опроса кодовых данных канальных запоминающих устройств.
| ПРИБОР ДЛЯ СТАТИСТИЧЕСКОГО ИССЛЕДОВАНИЯ РАСПРЕДЕЛЕНИЯ ЭНЕРГИИ БЛИКОВЫХ ПЕРЕОТРАЖЕНИЙ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ОТ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2422853C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ ПОРОГОВОЙ ЧУВСТВИТЕЛЬНОСТИ МНОГОКАНАЛЬНОГО СКАНИРУЮЩЕГО ТЕПЛОПЕЛЕНГАТОРА И ТЕСТОВЫЙ ОБЪЕКТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269796C1 |
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| US 7688348 В2, 30.03.2010. | |||

