Изобретение относится к измерительной технике и может быть использовано для измерения координат и скорости низколетящих ракет морского базирования.
Известно использование лазерных доплеровских локаторов с непрерывным излучением одночастотных газовых лазеров, например СО2-лазеров [1-5].
В известных лазерных доплеровских локаторах с непрерывным режимом излучения обеспечивается высокий энергетический потенциал по обнаружительной способности и измерению радиальной скорости движущихся дифракционно ограниченных объектов, таких как ракеты. Однако в таких системах отсутствует способность к измерению наклонной дальности этих объектов, что является существенным ограничением, поскольку измерение текущих координат лоцируемых объектов является весьма важной задачей.
В качестве ближайшего аналога заявляемому техническому решению, устраняющему указанный недостаток известных лазерных доплеровских локаторов с непрерывным режимом излучения, является «Способ локации», известный из заявки О.Ф.Меньших №2005130593/28 (034288) от 03.10.2005, по которой 17.11.2006 отделом измерительной техники и приборостроения ФИПС вынесено решение о выдаче патента РФ.
Сущность этого способа, позволяющего наряду с измерением радиальной скорости объектов проводить измерение их наклонной дальности (координат объектов), состоит в том, что способ локации, основанный на зондировании дифракционно ограниченного объекта, движущегося над поверхностью моря (океана), немодулированными излучениями одночастотного лазера непрерывного действия и многоканальной когерентной обработке принимаемых излучений матричным фотоприемным устройством с определением доплеровских сдвигов частоты в переотраженном излучении и последующей многоканальной параллельной согласованной фильтрацией выделенных радиосигналов, отличающийся тем, что когерентному приему и обработке дополнительно и одновременно подвергают отраженные от нескольких бликов морской поверхности излучения, поступающие на фотоприемную матрицу с разных произвольно распределенных угловых направлений, определяют в соответствующих каналах, связанных с матричным фотоприемным устройством, доплеровские сдвиги частоты в принятых излучениях от бликов морской поверхности и соответствующие им угловые координаты на эти морские блики, вычисляют текущие координаты местоположения объекта и его истинную скорость, а также статистически усредняют полученные результаты вычислений всей совокупности совместных измерений указанных параметров.
Использование бликовых переотражений морской поверхностью лазерного излучения, рассеянного лоцируемым объектом, из различных случайных направлений с соответствующими каждому из них доплеровскими смещениями частоты относительно частоты зондирующего объект излучения лазера позволяет рассматривать такую систему сбора информации как аналог триангуляционной системы измерения координат объекта с тем лишь различием, что местоположение группы «локаторов» не остается стабильным во времени, а изменяется во времени случайным образом, что определяется дислокацией переотражающих излучение отражателей, образующихся на морской поверхности вследствие ее волнения.
Использование многоканальной обработки сигналов матричного фотоприемного устройства приводит к выделению доплеровских сдвигов частоты для соответствующих азимутально-угломестных направлений принимаемых от морских бликов переотражений относительно исходного азимутально-угломестного направления зондирования объекта, что позволяет на основе известных вычислительных операций реконструировать местоположение последнего.
Указанный способ реализован в заявляемом техническом решении - лазерном доплеровском локаторе, содержащем одночастотный газовый лазер непрерывного действия, например СО2-лазер, связанный с лоцируемым объектом через отражающие зеркала и с приемно-передающим объективом и системой сканирования по угловым координатам, матричное фотоприемное устройство, соединенное с многоканальным блоком обработки принимаемых сигналов, подключенным к входам решающего устройства на базе вычислителя параметров объекта, выходами связанного с индикаторами измеряемых параметров объекта, а дополнительным входом - с дополнительным выходом системы сканирования по угловым координатам - азимуту и углу места зондирующего излучения, отличающемся тем, что решающее устройство снабжено подключенным к выходам многоканального блока обработки принимаемых сигналов таймером временной привязки принимаемых в соответствующих каналах матричного фотоприемного устройства излучений и блоком статистической обработки перерабатываемой в решающем устройстве информации о текущих координатах лоцируемого объекта, связанным двусторонними связями с таймером временной привязки и с входом вычислителя параметров объекта.
При этом локатор принимает как отраженные от объекта излучения, так и переотраженные от бликов морской поверхности излучения, образующиеся при рассеянии объектом зондирующего излучения лазера с соответствующими доплеровскими сдвигами частоты.
Указанные отличия заявляемого технического решения позволяют зафиксировать картину мгновенного распределения доплеровских сдвигов частоты в соответствующих каналах обработки принимаемых сигналов во времени и апостериорно провести статистическое усреднение полученной информации с целью уменьшения ошибки текущего местоопределения лоцируемого объекта. При этом получаемые статистическим усреднением измеряемые координаты объекта получают с некоторым допустимым сдвигом во времени по отношению к моменту, для которого эти параметры вычислены, что учитывается при выдаче финальной информации на индикаторы измеряемых параметров объекта.
Заявляемое устройство представлено на чертеже.
Оно содержит одночастотный газовый лазер непрерывного действия 1, оптически связанный через три отражающих зеркала 2 с лоцируемым объектом и с приемно-передающим объективом 3, ориентируемым системой сканирования по угловым координатам 4, управляющей положением зондирующего луча по азимуту и углу места, матричное фотоприемное устройство 5, расположенное в фокальной плоскости приемно-передающего объектива 3, с выходами, соединенными с входами многоканального блока обработки принимаемых сигналов 6, который выходами подключен ко входам решающего устройства 7, состоящего из вычислителя параметров объекта 8, действующего по заданному алгоритму вычислений, таймера временной привязки 9 принимаемых в соответствующих каналах матричного фотоприемного устройства излучений и блока статистической обработки 10 перерабатываемой в вычислителе параметров объекта 8 информации о текущих координатах лоцируемого объекта. Выходы решающего устройства 7 (конкретно - вычислителя 9) соединены с индикаторами 11 измеряемых параметров объекта, а его дополнительные входы подключены к дополнительным выходам системы сканирования по угловым координатам 4.
На чертеже также указан лоцируемый объект 12 и отражающая морская поверхность 13.
Рассмотрим действие заявляемого устройства.
На чертеже изображена одна из возможных ситуаций облучения точечного объекта (например, крылатой ракеты морского базирования) локатором с известными его местоположением и угловой ориентацией на обнаруженный им объект. Кроме прямого отражения указаны два других действующих переотражения от разных бликов морской поверхности. Различны углы, под которыми объект освещает действующие блики морской поверхности по отношению к линии прямого отражения. Усматривается, что эти углы однозначно связаны с величинами регистрируемых доплеровских сдвигов частоты для отраженных от указанных морских бликов вторичных излучений по сравнению с доплеровским сдвигом частоты для прямого отраженного от объекта сигнала. Это позволяет расчетным путем на основе геометрических построений найти искомые величины наклонной дальности до объекта локации и высоты его полета над поверхностью моря.
Известно, что при движении отражающего объекта со скоростью V в направлении излучения лазерного локатора с частотой ν0 (такая скорость называется радиальной) в прямом отраженном от объекта излучении возникает приращение частоты - доплеровский сдвиг - Δν0=ν0(1+2V/с)-ν0=2ν0V/с, где с - скорость света. По величине этого сдвига Δν0 определяют радиальную скорость V объекта, что тривиально. Если падающее на объект излучение переотражается от него под некоторым углом θ относительно линии указанного направления облучения объекта от локатора, то частота доплеровского сдвига выражается по формуле Δν(θ)=Δν0cosθ в предположении, что объект не является релятивистским, то есть 2V/с<<1, что всегда выполняется применительно к локации. Поскольку лоцируемый объект рассматривается как дифракционно ограниченный, можно считать, что переотраженное им излучение является квазисферическим в силу принципа Гюйгенса, то есть происходит по всем направлениям, не затененным самим телом объекта. Реально головная часть ракеты имеет форму, создающую переотражения, в частности, в направлениях к морской поверхности даже более сильные, чем отражение в направлении непосредственно к локатору (особенно если ракета летит прямо на локатор). В зависимости от того, под каким углом θ компонента переотраженного от движущегося объекта излучения освещает тот или иной морской блик, создающий зеркальное (то есть сильное) отражение в сторону локатора, в принятых от таких бликов сигналах доплеровские сдвиги частоты будут различаться между собой и доплеровским сдвигом (наибольшим по величине) для прямого отражения от объекта Δν0. Это и позволяет по известной геометрии приходящих на фотоприемную матрицу излучений от объекта и от серии морских бликов расчетным путем определить интересующие параметры объекта - его радиальную скорость, наклонную дальность и высоту полета над уровнем моря. Угловые координаты объекта при его обнаружении определяются по данным угловых датчиков сканирующей системы, привязанной к заданному местоположению локатора, а также по номеру канала фотоприемной матрицы, в котором фиксируется сигнал от прямого отражения излучения объектом.
Сканирующая по угловым координатам система локатора, работающая в автоматическом режиме подстройки при захвате обнаруженного объекта, всегда приводит прием в матричном фотоприемном устройстве (ФПУ) прямого переотраженного от объекта излучения на центральный канал фотоприемной матрицы ФПУ, условно принимаемый за нулевой. По отношению к этому нулевому номеру центрального канала фотоприемной матрицы, размещенной в плоскости изображений приемного объектива локатора, появление сигналов от бликовых переотражений в других ячейках фотоприемной матрицы с известными номерами позволяет определить (по разности номеров ячеек по отношению к центральной ячейке) угловое направление на данный морской блик по отношению к направлению непосредственно на объект. При этом возникает неопределенность в определении положения данного морского блика, связанная с априорным отсутствием сведений о наклонной дальности до объекта (и высоте его полета над поверхностью моря, что однозначно связано с величиной наклонной дальности до объекта). Раскрытие этой неопределенности достигается на основе совместного решения системы трех (как минимум) независимых уравнений, одно из которых связано с прямым отражением, а два (или более) других - с бликовыми переотражениями.
Локатор с заведомо известным местоположением в заданной системе координат обнаруживает в режиме сканирования движущийся объект 12, захватывает его в режиме автосопровождения по угловым координатам и измеряет радиальную скорость V объекта по величине доплеровского сдвига частоты Δν0. При этом считаются известными угловые координаты на объект по отношению к реперной точке локатора, координаты которой (в частности, ее высота h0 над уровнем моря) известны - X0, Y0 и Z0=h0. Полагаем, что линия направления прямого переизлучения от объекта проходит через данную реперную точку. Указанная линия имеет известные угловые координаты - азимут α0(t) и угол места ε0(t), величины которых во времени t могут непрерывно изменяться за счет движения объекта, но всегда остаются известными функциями времени. Поэтому для определения текущих координат объекта X(t), Y(t) и Z(t) необходимо лишь определять текущую наклонную дальность D(t) до объекта 12 вдоль указанной линии, и тогда по известным правилам координаты объекта могут быть легко вычислены (при этом считаем для простоты локатор неподвижным в заданной системе координат):
В случае если движение объекта происходит не точно в направлении этой линии к локатору, а под каким-то произвольным углом, то вычисление истинной скорости объекта V*(t) может быть найдено по правилам сложения взаимно ортогональных векторов, модули которых - суть производные соответствующих координат:

причем очевидно, что радиальная скорость V как вектор, совпадающий с данной линией, вдоль которой изменяется наклонная дальность D(t), также является, вообще говоря, функцией времени V=V(t) и выражается простой формулой:

Отметим, что скорости - истинная V*(t) и радиальная V(t) - в общем случае неодинаковы по величине и различны по направлению, |V*(t)|≥ |V(t)|. Изменение величины радиальной скорости происходит как результат маневрирования объекта в пространстве, при этом также меняется величина доплеровского сдвига частоты Δν0=Δν0(t). Знание истинной скорости движения объекта V*(t) необходимо для проведения идентификационного анализа типа этого объекта, поскольку истинная скорость объекта является его важным признаком. Если выражение (2) решить с учетом системы уравнений (1), то окажется, что истинная скорость объекта является функцией не только известной радиальной скорости, азимута и угла места на объект, но и неизвестной наклонной дальности до него, то есть V*(t)=F[Δν0(t), α0(t), ε0(t), D(t)], что означает невозможность определения истинной скорости объекта без измерения наклонной дальности до него. Из этого следует, что на этапе обнаружения объекта и измерения его радиальной скорости (без измерения текущей наклонной дальности) могут быть допущены ошибки в распознавании типа объекта и приняты неверные решения на предмет его дальнейшего автосопровождения по угловым координатам по критерию существенного различия измеренной радиальной скорости и истинной (пока неизвестной) скорости интересующего нас объекта. Поэтому задача одновременного измерения наклонной дальности D(t) является весьма актуальной уже на ранних стадиях обнаружения объекта.
Эта задача поставлена и разрешена в заявляемом техническом решении.
Рассмотрим вопрос измерения наклонной дальности D(t). Высота реперной точки с координатами Х0, Y0, Z0 равна h0=Z0. Обозначая высоту полета объекта 12 над уровнем моря как H(t), путем несложных геометрических построений находим для величины D(t) простое выражение

где ε0(t) - текущее значение угла места на объект, а значение H(t) находится по формуле:

где ε1(t) и ε2(t) - текущие значения углов места первого и второго морских бликов, определяемые по соответствующим номерам строк матричного ФПУ, θ1 и θ2 - углы переотражений от объекта на соответствующие бликующие поверхности моря, значения которых однозначно определяются значениями доплеровских сдвигов частоты в переизлучениях соответственно от первого и второго бликов, как это следует из соотношения Δν(θ)=Δν0cosθ. Подставляя (5) в (4), находим искомое значение наклонной дальности D(t) как функции параметров h0, ε0(t), ε1(t), ε2 (t), θ1(Δν1), θ1(Δν2). В частности, для углов θ1(Δν1) и θ1(Δν2) имеем выражения:

Подставляя в (5) вычисленные значения углов из (6), получим искомую величину высоты полета объекта H(t) над поверхностью моря, а затем и значение наклонной дальности D(t), воспользовавшись выражением (4) и с учетом равенства Δν0=2ν0(V/с), значение которого вычисляется в центральном канале ФПУ по результатам прямого отражения излучения от объекта. Подставляя полученное значение для D(t) в систему уравнений (1), находим текущие координаты объекта X(t), Y(t) и Z(t), а вычисляя соответствующие производные от текущих координат, находим истинную скорость движения V*(t) объекта согласно выражению (2). В силу громоздкости вычислений конечных величин координат и истинной скорости объекта мы их опускаем в данном описании, но эти вычисления легко осуществляются с помощью вычислителя параметров объекта 8, имеющегося в составе решающего устройства 7 локатора.
Нетрудно видеть, что полное решение локационной задачи местоопределения движущегося объекта и его истинной скорости (важнейшего признака его типа) достигается измерением азимутов и углов места как минимум по трем направлениям переизлучения - прямому и двум бликовым, а также измерением трех доплеровских сдвигов частоты по этим же направлениям. Такое решение задачи получено, как выше описано, когда все три направления лежат в одной плоскости, то есть дают отклик в ячейках матрицы ФПУ, расположенных в одном и том же столбце. При этом матрица может быть вырожденной - состоять из одного столбца фоточувствительных ячеек, а само излучение в передающем лазерном канале иметь «веерообразную» форму диаграммы излучения - узкую по азимуту и широкую по углу места. Диаграмма направленности приемного тракта с матричным ФПУ 5 должна охватывать достаточно большой телесный угол, чтобы принимать бликовые излучения с достаточно большой площади морской поверхности вблизи объекта локации, когда должны будут учитываться в аналогичном приведенному расчете азимутальные составляющие α0(t), α1(t) и α2(t), что дополнительно усложнит алгоритм расчетных операций, производимых в вычислителе параметров объекта 8.
Повышение точности производимых измерений значения наклонной дальности D(t), как нетрудно понять, требует учета как можно большего числа бликовых переотражений от морской поверхности, при котором выражение (4) будет дополнено членами, содержащими значения азимутов α0(t), α1(t), α2(t), ... αК(1) для прямого и К - бликовых сигналов, а также значения соответствующих углов места ε0(t), ε1(t), ε2(t), ... εК(t) и значения углов θ1, θ2, ... θK для соответствующих измеряемых значений доплеровских сдвигов частоты Δν1, Δν2, ... ΔνК с учетом доплеровского сдвига Δν0.
Для этой цели в заявляемом техническом решении используется матричный ФПУ 5 с многоканальным блоком обработки принимаемых сигналов 6, так что прием переотражений производится от бликов, произвольно распределенных на морской поверхности в пределах некоторого достаточно большого телесного угла зрения локатора. При этом в случайной последовательности регистрируются переотражения от бликов с различных каналов блока 6 в форме радиоимпульсов с соответствующими частотами доплеровских сдвигов непрерывно во времени, причем одновременно может регистрироваться произвольное число бликовых сигналов. При действии одновременно нескольких бликовых сигналов определение путем вычисления в вычислителе параметров объекта 8 значений текущих координат объекта и других параметров (наклонной дальности, высоты полета, истинной и радиальной скорости) обеспечивается просто совместным решением системы соответствующих уравнений, как об этом указано в способе-прототипе. Однако если бликовые сигналы приходят в случайном временном потоке, то есть разделены во времени их поступления в многоканальный блок обработки принимаемых сигналов 6, требуется их взаимное временное согласование и запоминание моментов времени их поступления.
Для решения задачи временного согласования бликовых сигналов - случайных функций времени - в решающем устройстве 7, кроме вычислителя параметров объекта 8, выполняющего вычислительные операции с полученной системой уравнений, используются таймер временной привязки 9 принимаемых в соответствующих каналах матричного фотоприемного устройства излучений и блок статистической обработки 10 перерабатываемой в вычислителе параметров объекта 8 информации о текущих координатах лоцируемого объекта. Эти блоки обеспечивают формирование указанной системы уравнений, вычисления по которой осуществляется в вычислителе параметров объекта 8.
Таймер временной привязки 9 осуществляет функции запоминания частоты доплеровских сдвигов Δνi(t) в соответствующих каналах обработки i=1, 2, 3, ... К c временной привязкой моментов поступления таких сигналов к текущему времени для группы этих сигналов, поступивших в заданный интервал времени Δt, причем интервал времени накопления информации Δt определяет темп обработки в вычислителе параметров объекта 8, то есть темп обновления измеряемых параметров объекта, отображаемых в индикаторах измеряемых параметров объекта 11. В каждом цикле запоминания совокупной информации (в интервале времени Δt), отображаемой в цифровых кодах, в таймере временной привязки 9 регистрируется матрица, например, из пяти реализаций вида (здесь К=5≤nm):
Эта отображающая сигналы матрица из n*m элементов совпадает со структурой матрицы ФПУ 5 (см. чертеж). Код времени Bjs задается датчиком времени, а код частоты Ajs доплеровского сдвига вырабатывается в многоканальном блоке обработки принимаемых сигналов 6, то есть таймер временной привязки, по существу, представляет n*m-канальное цифровое запоминающее устройство; информация со всех запоминающих ячеек в конце цикла записи Δt стирается, а затем вновь записывается новыми данными в следующем цикле. При этом частота смены циклов записи-считывания равна Fцикл.=1/Δt.
Информация с К запоминающих элементов таймера временной привязки 9 используется для преобразования к единому моменту времени, каковым выбирается время конца цикла tP=to+рΔt, где tо - момент включения устройства, р=1, 2, 3, ... - номер цикла измерения. Однако поскольку информация в ячейки памяти записывается в разные моменты времени, хотя и достаточно близкие между собой (!), использовать ее для последующего расчета, полагая съем данных одномоментным, можно только с некоторой ошибкой, возрастающей с увеличением интервала Δt. Для снижения ошибки расчета можно уменьшить интервал Δt, но при этом снизится количество запоминаемых выборок сигнала, что также нежелательно с точки зрения получения достоверных результатов измерения. Следовательно, возникает противоречие между точностью измерений, определяемой количеством используемых в расчете выборок информации, и возможностью увеличения интервала наблюдений в цикле Δt.
Разрешение этого противоречия достигается применением в решающем устройстве 7 блока статистической обработки 10 перерабатываемой в вычислителе параметров объекта 8 информации о текущих координатах лоцируемого объекта. Действие этого блока призвано корректировать данные кодов частоты доплеровских смещений, регистрируемых в разные моменты времени в интервале времени цикла Δt, на основе апостериорного анализа динамики изменения этих кодов во времени, полагая, что за время цикла Δt характеристики движения объекта (его скорость и направление движения) остаются практически неизменными. Поэтому блок статистической обработки сравнивает решения, получаемые при расчете данных в вычислителе параметров объекта 8, якобы полученных одномоментно (хотя это не так), с данными, полученными в результате статистической обработки по нескольким смежным циклам анализа, с учетом выявляемой динамики движения объекта, что позволяет апостериорно уточнить коды частот доплеровских сдвигов, получаемых в предыдущем цикле наблюдения в различные моменты времени в пределах этого цикла. Поэтому на чертеже связь между блоками 8, 9 и 10 обозначена как двухсторонняя (информация поступает из одних узлов блока в другой и, наоборот, из последнего в другие узлы первого). Более подробное описание процедуры статистического усреднения результатов наблюдений выходит за рамки настоящей заявки и может составить предмет отдельной разработки.
Результаты полученных вычислений с их коррекцией и статистическим усреднением для повышения точности измеряемых параметров с выхода решающего устройства 7 (вычислителя параметров объекта 8) поступают на индикаторы измеряемых параметров объекта 11 и далее используются для выполнения целевых задач морского соединения, например, для управления огнем противоракетных установок (включения заградительного огня, пуска противоракетного оружия и т.д.).
Отметим, что для обеспечения режима фотосмешения оптических взаимно когерентных колебаний - части зондирующего излучения и всех компонент принимаемого приемно-передающим объективом 3 оптических сигналов для выделения составляющих с соответствующими доплеровскими сдвигами частоты в локаторе, излучение лазера 1 частично воздействует на матричное ФПУ 5 с помощью отражающего зеркала 2, расположенного на чертеже вблизи приемно-передающего объектива 3 и обладающего малым пропусканием для создания оптического сигнала гетеродинирования (другие отражающие зеркала являются «глухими»).
В многоканальном блоке обработки принимаемых сигналов 6 осуществляется оптимальная фильтрация электрических сигналов с соответствующих выходов матричного ФПУ 5, измерение частоты доплеровского смещения в соответствующих работающих каналах, каждый из которых определяется номером строки и номером столбца матричного ФПУ 5, а также операция преобразования «частота-код». При этом для оптимальной фильтрации принятых сигналов могут использоваться методы обработки на основе дисперсионных линий задержки или линий с длительным взаимодействием с последующими операциями «сжатия» образующихся сложных сигналов, например линейно-частотно-модулированных сигналов, детектирования и порогового ограничения по известной методике [6-14].
Разработку и опытное внедрение заявляемого технического решения можно осуществить на предприятиях Министерства оборонной промышленности в интересах ВМФ России.
Литература
1. Меньших О.Ф. Измеритель частоты сигналов лазерного доплеровского локатора. авт. свид. СССР №1621728 и авт. свид. СССР №1621729, 1988.
2. Меньших О.Ф. Спектроанализатор лазерного доплеровского локатора. Авт. свид. СССР №1595219, 1988.
3. Меньших О.Ф. Лазерный доплеровский локатор. Авт. свид. СССР №1741553, 1990.
4. Меньших О.Ф. Способ обнаружения детерминированного радиосигнала. Авт. свид. СССР №1828280, 1991.
5. Меньших О.Ф. Обнаружитель лазерного доплеровского локатора. Авт. свид. СССР №1805756 и №1829640, 1991.
6. Фильтры на поверхностных акустических волнах. / Под ред. Г.Мэттьюза, М., Сов. радио, 1981, 472 с.
7. Тверской В.И. Дисперсионно-временные методы измерения спектров радиосигналов, М., Сов. радио, 1974, 240 с.
8. Джек А.А., Грант П.М., Коллинз Дж.Х. Теория проектирования и применение Фурье-процессоров на поверхностных акустических волнах, ТИИЭИР, 1980, №4, р.22-43.
9. Меньших О.Ф. Формирователь сложных линейно-частотно-модулированных сигналов. Авт. свид. СССР №1302987, 1985.
10. Меньших О.Ф. Способ анализа спектра сигналов. Авт. свид. СССР, №1817554, 1988.
11. Меньших О.Ф. Обнаружитель моноимпульсного сигнала. Патент РФ №2046370, 1992.
12. Борн М., Вольф Э. Основы оптики, М., Наука, 1970.
13 Левин Б.Р. Теоретические основы статистической радиотехники, М., Сов. радио, 1974, кн.1 и 2.
14. Тихонов В.И. Оптимальный прием сигналов, М., Радио и связь, 1983, 320 с.
Изобретение относится к измерительной технике и может быть использовано для измерения координат и скорости низколетящих ракет морского базирования. Техническим результатом изобретения является увеличение точности измеряемых параметров. Лазерный доплеровский локатор содержит одночастотный газовый лазер непрерывного действия 1, оптически связанный через три отражающих зеркала 2 с лоцируемым объектом 12 и с приемно-передающим объективом 3, ориентируемым системой сканирования по угловым координатам 4, управляющей положением зондирующего луча по азимуту и углу места, матричное фотоприемное устройство 5, расположенное в фокальной плоскости приемно-передающего объектива 3, многоканальный блок обработки принимаемых сигналов 6, решающее устройство 7, состоящее из вычислителя параметров объекта 8, таймера временной привязки 9, блока статистической обработки 10. Выходы решающего устройства 7, конкретно - вычислителя 9, соединены с индикаторами 11 измеряемых параметров объекта. 1 ил.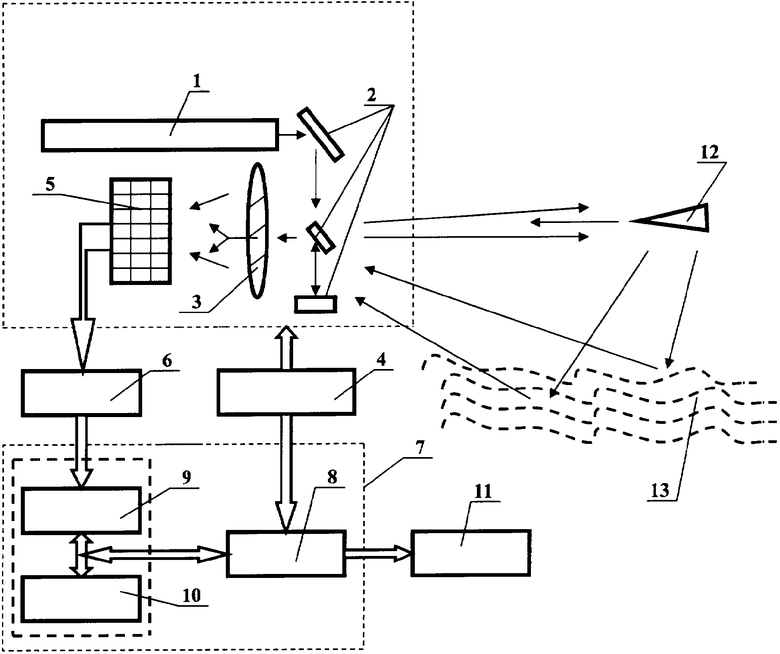
Лазерный доплеровский локатор, содержащий одночастотный газовый лазер непрерывного действия, например СО2-лазер, связанный с лоцируемым объектом через отражающие зеркала и с приемно-передающим объективом и системой сканирования по угловым координатам, матричное фотоприемное устройство, соединенное с многоканальным блоком обработки принимаемых сигналов, подключенным к входам решающего устройства на базе вычислителя параметров объекта, выходами связанного с индикаторами измеряемых параметров объекта, а дополнительным входом - с дополнительным выходом системы сканирования по угловым координатам - азимуту и углу места зондирующего излучения, отличающийся тем, что решающее устройство снабжено подключенным к выходам многоканального блока обработки принимаемых сигналов таймером временной привязки принимаемых в соответствующих каналах матричного фотоприемного устройства излучений и блоком статистической обработки перерабатываемой в решающем устройстве информации о текущих координатах лоцируемого объекта, связанным двусторонними связями с указанными таймером временной привязки и с входом вычислителя параметров объекта.
| АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 1990 |
|
RU2012013C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| SU 1810030 A3, 27.04.1996 | |||
| US 5000567 A, 19.03.1991 | |||
| ПЕНОБЕТОНОСМЕСИТЕЛЬ | 2003 |
|
RU2256554C1 |

