Способ захвата малогабаритных беспилотных летательных аппаратов
Изобретение относится к области захвата малогабаритных беспилотных летательных аппаратов (МБЛА) и может быть использовано в военной технике.
Известны различные способы и технические решения для захвата МБЛА с использованием устройства сети-ловушки для борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами (ДПЛА) (патент №72753 прототип), устройство борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами (патент №72754) [1, 2].
Недостатками являются: сложность конструкции, большие размеры, большая мощность двигателя для буксировки сети из-за ее большого аэродинамического сопротивления; использование звукотеплового способа наводки на цель, который малоэффективен из-за низкого энергопотребления цели - ДПЛА и высокой стоимости самого устройства наведения, и обязательного применения низких температур для инфракрасных датчиков; отсутствие парашюта или иного устройства, смягчающего приземление.
Устройство - истребитель для уничтожения дистанционно пилотируемых (бесцилотных) летательных аппаратов, состоящее из дистанционно пилотируемого летательного аппарата, системы наведения с земли в виде радиолокатора, сети, отличающееся тем, что на дистанционно пилотируемом летательном аппарате установлены видеокамеры обзора и до четырех датчиков перемещения, а также взаимосвязанные с ними (до четырех) контейнеры для поражающих элементов, выполненных в виде кассет с уложенными в них сетями из высокопрочной полимерной нити из параарамидного волокна «Арамида», или «Кевлар», или «Тварон», причем по углам сети располагаются грузила-контейнеры в виде патронов с ленточными парашютами в гильзах, причем один конец ленточного парашюта закреплен за сеть, а гильза со свернутой в ней лентой отстреливается пиропатроном с замедлителем в момент охвата цели сетью, а датчики перемещения и взаимосвязанные с ними кассеты расположены на правом, левом, нижнем и верхнем боках фюзеляжа (патент №2490584, прототип) [3].
Недостатками являются: использование радиолокатора для наведения средства к цели при ведении радиоэлектронной борьбы, что может привести к полной потере управления ДПЛА на этапе выхода устройства в рабочий режим видеокамер и датчиков, отсутствие камер кругового обзора, использование нескольких грузил-контейнеров, размещенных по углам сети (их необходимо хотя бы три, а лучше четыре), может привести к запутыванию ленточных парашютов между собой, при выстрелах трех-четырех пиропатронов, что приведет к потере захваченного ДПЛА; устройство не учитывает характеристики местности его приземления.
Известные способы не эффективны для захвата и посадки ДПЛА, тем более МБЛА, управляемых искусственным интеллектом, способных совершать сложные маневры, облетая препятствия.
Для решения проблемы захвата МБЛА противника 3 предлагается использовать МБЛА 1, на котором установлены камеры кругового обзора 2, которые принимают электромагнитные волны 4 в оптическом диапазоне (фиг. 1). Камеры кругового обзора с помощью бортового процессора 5 позволяют определять в пассивном режиме пространственные координаты МБЛА противника 3. Выбирая определенную дальность и скорость полета МБЛА противника 3, автоматическая система управления МБЛА на основе искусственного интеллекта (бортовой процессор 5) управляет работой механизмов отсеков, размещенных подряд в нижней части фюзеляжа 6. В каждом отсеке размещены сети 7 с грузилами 8 (фиг. 2) и устройства их отстрела 9 (фиг. 3), а также устройства с автоматическим креплением 10 высокопрочной полимерной нити 11, соединяющей парашют 12, для спуска, захваченного в сеть 7 МБЛА противника 3 (фиг. 4).
МБЛА 1 транспортирует в запрограммированный район либо выбирает наиболее благоприятный рельеф местности для успешной эвакуации захваченного МБЛА противника 3 (фиг. 5) и продолжает патрулирование пространства. В случае промаха устройство крепления 10 отпускает сеть 7, и МБЛА 1 для захвата МБЛА противника 3 повторяет заход в атаку и производит повторный выстрел из другого отсека.
Краткое описание элементов чертежей:
1 - малогабаритный беспилотный летательный аппарат (МБЛА) для захвата МБЛА противника;
2 - камеры кругового обзора;
3 - МБЛА противника;
4 - электромагнитные волны оптического диапазона;
5 - бортовой процессор на основе искусственного интеллекта;
6 - отсеки для размещения устройств захвата МБЛА противника;
7 - сеть;
8 - грузила;
9 - устройство отстрела грузил;
10 - устройство крепления высокопрочной полимерной нити;
11 - высокопрочная полимерная нить;
12 - парашют для транспортирования и плавного спуска МБЛА противника.
Источники информации
1. Пархоменко В.А., Устинов Е.М., Пушкин В.А., Беляков В.А., Шишков С.В. Устройство борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами. - ФИПС. Патент на полезную модель №72754, 27.04.08 г.
2. Богомолов А.И., Пархоменко В.А., Устинов Е.М., Елизаров С.С., Искоркин Д.В., Шишков С.В. Устройство сети-ловушки для борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами. - ФИПС. Патент на полезную модель №72753, 27.04.08 г.
3. Голодяев А.И., Чистяков Н.В. Устройство - истребитель для уничтожения дистанционно пилотируемых (беспилотных) летательных аппаратов. - ФИПС. Патент на изобретение №2490584, 15.05.2012 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2660998C1 |
| СПОСОБ ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2661021C1 |
| СПОСОБ ЗАХВАТА ВОЗДУШНОЙ ЦЕЛИ СЕТЬЮ | 2020 |
|
RU2745590C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2565860C2 |
| СПОСОБ ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2755556C1 |
| УСТРОЙСТВО - ИСТРЕБИТЕЛЬ ДЛЯ УНИЧТОЖЕНИЯ ДИСТАНЦИОННО ПИЛОТИРУЕМЫХ (БЕСПИЛОТНЫХ) ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ДПЛА) | 2012 |
|
RU2490584C1 |
| СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСНЫМИ МЕТОДАМИ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2014 |
|
RU2578524C2 |
| СПОСОБ ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ НАД ОБЪЕКТОМ | 2024 |
|
RU2838712C1 |
| СТАЦИОНАРНЫЙ КОМПЛЕКС ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2734267C1 |
| ТЕРМОБАРИЧЕСКИЙ СПОСОБ БОРЬБЫ С РОЕМ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2733600C1 |
Изобретение относится к военной технике. Способ захвата малогабаритных беспилотных летательных аппаратов (МБЛА) противника основан на использовании МБЛА, автоматической системы управления с элементами искусственного интеллекта, сети из высокопрочной полимерной нити и грузил. На МБЛА установлены камеры кругового обзора, позволяющие с помощью бортового процессора определять в пассивном режиме пространственные координаты МБЛА противника в оптическом диапазоне электромагнитных волн, выбирая определенную дальность и скорость полета. В нижней части фюзеляжа МБЛА размещены подряд отсеки для сетей с грузилами и устройств их отстрела, а также устройства с автоматическим креплением высокопрочной полимерной нити, соединяющей парашют, для спуска захваченного в сеть МБЛА противника. Изобретение направлено на нейтрализацию захват МБЛА противника при выполнении сложного маневра с возможностью снятия разведанной им информации. 5 ил.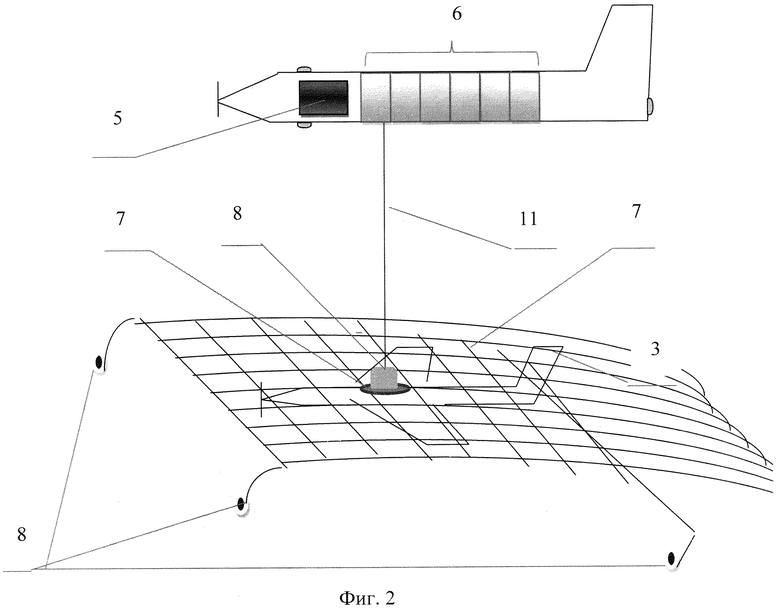
Способ захвата малогабаритных беспилотных летательных аппаратов (МБЛА) противника, основанный на использовании МБЛА, автоматической системы управления с элементами искусственного интеллекта, сети из высокопрочной полимерной нити и грузил, отличающийся тем, что на МБЛА установлены камеры кругового обзора, позволяющие с помощью бортового процессора определять в пассивном режиме пространственные координаты МБЛА противника в оптическом диапазоне электромагнитных волн, выбирая определенную дальность и скорость полета, в нижней части фюзеляжа МБЛА размещены подряд отсеки для размещения сетей с грузилами и устройств их отстрела, а также устройства с автоматическим креплением высокопрочной полимерной нити, соединяющей парашют, для спуска захваченного в сеть МБЛА противника, транспортировки с помощью собственной тяги МБЛА в запрограммированный район с наиболее благоприятным рельефом местности для успешной эвакуации захваченного МБЛА противника.
| УСТРОЙСТВО - ИСТРЕБИТЕЛЬ ДЛЯ УНИЧТОЖЕНИЯ ДИСТАНЦИОННО ПИЛОТИРУЕМЫХ (БЕСПИЛОТНЫХ) ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ДПЛА) | 2012 |
|
RU2490584C1 |
| US 8375837 B2, 19.02.2013 | |||
| US 7201348 B1, 10.04.2007 | |||

