Область техники
Изобретение относится к области захвата малогабаритных беспилотных летательных аппаратов (БЛА) и может быть использовано в военной технике.
Предшествующий уровень техники
Известны различные технические решения для захвата БЛА-цели в воздухе с использованием сети-ловушки, которая компактно уложена в БЛА-перехватчике.
Известен способ, описанный в патенте РФ №150610 на полезную модель «Устройство для захвата малогабаритных беспилотных летательных аппаратов», МПК: F41H 11/02, Заявка: 2014107027/11, приоритет: 25.02.2014, опубликовано 20.02.2015, авторы: Шишков Сергей Викторович (RU).
Устройство для захвата МБЛА запускается при обнаружении многоканальным средством обнаружения МБЛА противника, либо приступает к захвату при патрулировании пространства. Используя камеры кругового обзора, устройство для захвата МБЛА ориентируется так, чтобы зайти на МБЛА противника с хвоста сверху. Устройство уравнивает скорости полета, свою и противника, выбирая определенную дальность. Процессор подает команду на отстрел одной из шести сеток находящихся в специальных отсеках открывающихся внизу фюзеляжа. Сеть со встроенным крепежным элементом по середине и парашютным отделением выстреливается, с помощью пиротехнических патронов. Грузила обеспечивают разворачивание сети для захвата МБЛА. Высокопрочные полимерные нити и уравненная скорость полета устройства для захвата и МБЛА противника обеспечивают высокую точность и дальность полета сети. В момент охвата МБЛА противника сетью грузила запутываются на одной из сторон МБЛА противника. Происходит резкое падение МБЛА. Натягивается высокопрочная нить между сетью и устройством крепления в специальном отсеке, при этом парашют раскрывается и начинает тормозить спуск захваченного МБЛА. Разработанное устройство транспортирует в запрограммированный район либо выбирает наиболее благоприятный рельеф местности для успешной эвакуации захваченного МБЛА противника и продолжает патрулирование пространства. В случае промаха устройство крепления отпускает сеть, и устройство для захвата МБЛА повторяет заход в атаку, и производит повторный выстрел из другого отсека по МБЛА противника.
Признаками, совпадающими с существенными признаками заявляемого изобретения, являются - сеть со встроенным крепежным элементом по середине и парашютным отделением выстреливается, грузила обеспечивают разворачивание сети для захвата МБЛА, в момент охвата МБЛА противника сетью грузила запутываются на одной из сторон МБЛА противника. Происходит резкое падение МБЛА. Натягивается высокопрочная нить между сетью и устройством крепления в специальном отсеке, в случае промаха устройство крепления отпускает сеть, и устройство для захвата МБЛА повторяет заход в атаку, и производит повторный выстрел из другого отсека по МБЛА противника.
Недостатком данного устройства является то, что захват может быть произведен только малоскоростной или неподвижной воздушной цели, например, зависшим квадрокоптером. В случае высокоскоростной цели предложенный способ малоэффективен как по наведению самого МБЛА на цель, так и по эффективности ее захвата при движении цели параллельно сбрасываемой сети.
Известен также способ, описанный в патенте РФ №72754 на полезную модель «Устройство борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами», МПК: F41H 13/00, Заявка: 2007139175/22, приоритет 22.10.2007, опубликовано 27.04.2008, авторы: Пархоменко А.В., Молохина Л.А., Пушкин В.А., Устинов Е.М., Беляков В.А., Шишков С.В. (RU).
Сеть-ловушка размещена в контейнере. К краям сети на киперных лентах крепятся грузила. Ловушка доставляется в район нахождения ДПЛА с помощью устройства доставки (например, ракеты), где наводится на ДПЛА с помощью устройства наведения. Затем сеть-ловушка с грузилами отстреливается в сторону цели. При этом грузила растягивают сеть-ловушку, обеспечивая накрытие ловушкой ДПЛА. Процесс пеленгации ДПЛА осуществляется пассивным двухканальным (звукотепловым), то есть, скрытым способом. Размеры сети определяют величину компенсации ошибок наведения, а размеры ячеек и материал сети - захватываемой цели. В качестве грузов используются круглые пули зондировочных патронов ЗП-1 и ЗП-2 к ветровому ружью типа ВР-2, отстреливаемые на высоту до 150 и 200 м, соответственно. Пули имеют отверстия для крепления киперных лент. К данным лентам крепится сеть. Применять устройство по назначению можно снизу сверху.
Признаками, совпадающими с существенными признаками заявляемого изобретения, являются - сеть-ловушку размещают в контейнере, к краям сети крепят грузила, ловушку доставляют в район нахождения ДПЛА с помощью устройства доставки, наводят на ДПЛА, сеть-ловушку с грузилами отстреливают в сторону цели, при этом грузила растягивают сеть-ловушку, обеспечивая накрытие ловушкой ДПЛА.
Недостатком данного способа является то, что после доставки в район нахождения ДПЛА контейнера с сетью-ловушкой его наведение звукотепловым методом представляется малоэффективным, учитывая звукотепловые параметры современных БЛА, например, с электромоторным движителем или летящих в планирующем режиме. В случае скоростной цели предложенный способ малоэффективен как по наведению самого ДПЛА на цель, так и по эффективности ее захвата при движении цели параллельно сбрасываемой сети.
Известен также способ захвата цели, описанный в патенте №2495359 на изобретение РФ «Устройство уничтожения дистанционно пилотируемых (беспилотных) летательных аппаратов (ДПЛА)», МПК: F41H 11/02, Заявка: 2012120112/11, приоритет 15.05.2012, опубликовано 10.10.2013, авторы: Чистяков Н.В. (RU).
При подлете к цели ДПЛА оператор по видеокамерам обзора на дистанции ближе 500 метров наводит летательный аппарат ДПЛА на цель - ДПЛА. Оператор уравнивает скорости полета и обгоняет цель ДПЛА. При попадании в зону действия датчика перемещения, расположенного в хвостовой части ДПЛА, автоматически бортовой процессор (на чертеже не показан) дает команду на выброс парашюта. Открывается автоматический замок. Откидывается крышка, и пружина выбрасывает парашют. Датчик перемещения настроен на определенную дистанцию, и зона его действия ограничена диафрагмой. В момент наполнения купола парашюта мотор истребителя работает на максимальной мощности, и по окончанию наполнения купола происходит отстрел купола от срабатывания устройства отделения парашюта. Цель ДПЛА попадает в купол парашюта, теряет скорость и способность к полету и управлению, а стропы парашюта надежно удерживают цель ДПЛА внутри купола.
Признаками, совпадающими с существенными признаками заявляемого изобретения, являются: наведение дистанционно пилотируемого летательного аппарат (ДПЛА), размещение парашюта в контейнере с крышкой, наполнение купола парашюта воздухом, цель ДПЛА попадает в купол парашюта, теряет скорость и способность к полету.
Недостатком данного устройства является то, что наведение на цель радиолокатором по азимуту малоэффективно для наведения на маневрирующую скоростную цель. Также маловероятно опережение цели для выброса парашюта на пути ее следования и захват маневрирующей цели парашютом.
В качестве прототипа был выбран патент на полезную модель РФ №185949 «Устройство борьбы с беспилотными летательными аппаратами», МПК: F41H 13/00 F41H 11/04; B64D 1/00 (2006.01); Заявка: 2018131051, приоритет 08.10.2018 опубликовано 15.11.2018, авторы: Нескин А. Г. (RU), Бзыта В.И. (RU), Зеленов А.Н. (RU), Соколов M.JI. (RU), Подгорнов В.А. (RU), Кипкаев А.Е. (RU),
При обнаружении беспилотного летательного аппарата (БПЛА) противника наземная система многоканального средства дает команду на запуск ракеты. По командам с земли ракета ориентируется так, чтобы зайти на БПЛА противника с носа сверху. Блок наведения фиксирует цель - БПЛА и осуществляет ее захват и корректировку движения ракеты. При приближении ракеты на заданное расстояние до БПЛА по сигналу неконтактного датчика цели (не показано) производят подачу команды на блок метания сети и отстрел сети - ловушки в сторону БПЛА. Блок метания сети - ловушки работает следующим образом. Команда от электронного блока наведения поступает на аккумуляторную батарею блока управления запуска, откуда напряжение подается по проводу на воспламенитель. От воспламенителя горячий поток газов и частиц воспламеняет метательный пороховой заряд, при горении которого происходит выделение газов и рост давления в передней части камеры. Под действием этого давления происходит сжатие шайбы и открытие каналов стволов с метаемыми грузами. Происходит метание грузов, растягивающих сеть-ловушку в необходимую форму, обеспечивая накрытие и захват БПЛА. Сеть - ловушка обездвиживает БПЛА.
Признаками, совпадающими с существенными признаками заявляемого изобретения, являются: при приближении ракеты на заданное расстояние до БПЛА производят подачу команды на блок метания сети и отстрел сети - ловушки в сторону БПЛА, происходит метание грузов, растягивающих сеть-ловушку в необходимую форму, обеспечивая накрытие и захват БПЛА, сеть - ловушка обездвиживает БПЛА.
Недостатком данного способа является то, что в результате отстрела сети-ловушки происходит только раскрытие сети, ее движение в направлении полета ракеты практически прекращается из-за сопротивления воздуха и торможения грузов. Таким образом, захват БПЛА противника может произойти только если он направляется непосредственно в сетку и не маневрирует. То есть, объем воздушного пространства, в котором может быть произведен захват БПЛА сетью, сводится фактически к проекции сети, что явно недостаточно.
Раскрытие изобретения.
Задачей, на решение которой направлено заявляемое изобретение, является повышение вероятности захвата сетью воздушной БЛА-цели (беспилотных летательных аппаратов).
Технический результат, достигаемый при решении этой задачи, заключается в увеличении площади сети в развернутом виде и ее перемещении в направлении полета БЛА-перехватчика, сохранении балансировки БЛА-перехватчика после выброса сети, исключении столкновения БЛА-перехватчика с БЛА-целью.
Указанный технический результат достигается тем, что в способе захвата воздушной цели сетью, содержащем приближение БЛА-перехватчика с уложенной в нем сетью на заданное расстояние к БЛА-цели, отсоединение от БЛА-перехватчика метательных тел, к которым прикреплена сеть, разворачивание сети в воздухе, контакт сети и БЛА-цели в воздухе, согласно изобретению, в качестве метательных тел используют малогабаритные ракеты, сеть упаковывают в контейнер, который прикрепляют к одной из точек сети. Контейнер размещают на БЛА-перехватчике. После приближения в воздухе к БЛА-цели с БЛА-перехватчика сбрасывают контейнер с сетью, один из концов которой прикреплен к БЛА-перехватчику. Далее пускают ракеты с закрепленными на них концами сети в разные стороны под углом к направлению полета БЛА-перехватчика. БЛА-перехватчик осуществляет вертикальный маневр вверх относительно направлений пуска ракет. БЛА-перехватчик, ракеты и контейнер растягивают сеть в воздухе и несут ее в сторону БЛА-цели.
Совокупность перечисленных существенных признаков обеспечивает получение технического результата - увеличение площади сети в развернутом виде и возможность ее перемещения в направлении полета, сохранение балансировки БЛА-перехватчика после выброса сети, исключение столкновения БЛА-перехватчика с БЛА-целью. Это позволяет повысить вероятность захвата сетью воздушной БЛА-цели.
Краткое описание фигур и чертежей.
Предлагаемый способ захвата воздушной цели сетью иллюстрируется чертежами:
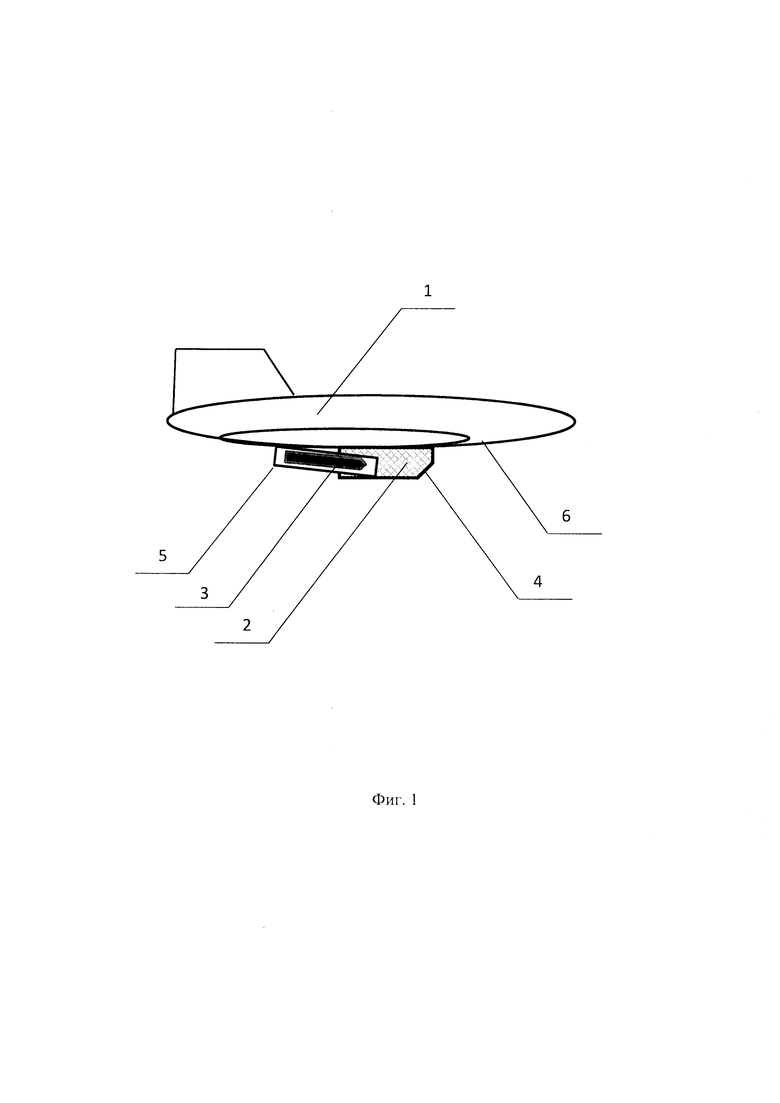
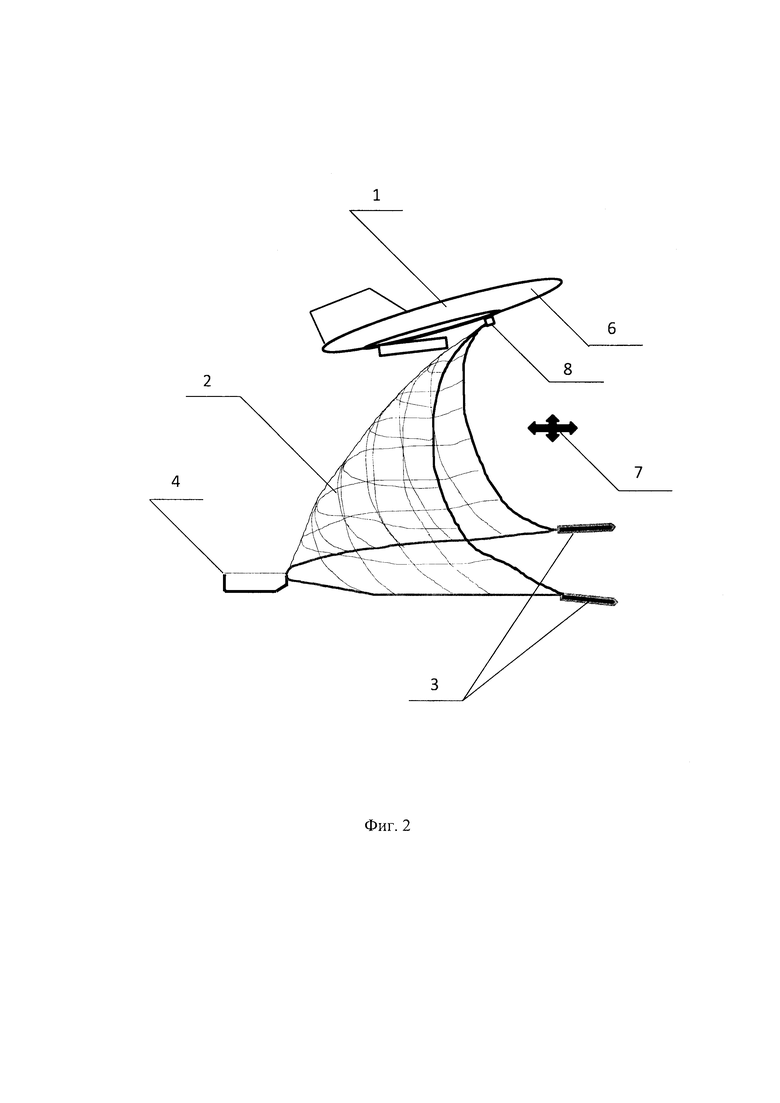
На фиг. 1 показана схема БЛА-перехватчика перед стартом. На фиг. 2 показана развернутая в воздухе сеть, вид сбоку. Варианты осуществления изобретения.
Для реализации способа захвата воздушной цели сетью используется БЛА-перехватчик 1, представленный на фиг. 1.
На БЛА-перехватчике 1 размещена сеть 2, с закрепленными на ее концах метательными телами, которые выполнены в виде малогабаритных ракет 3. Сеть 2 уложена в контейнер 4 с возможностью раскрытия без запутывания при извлечении ее из контейнера 4. Концы сети 2 прикреплены к контейнеру 4, БЛА-перехватчику 1 и ракетам 3. Малогабаритные ракеты 3 расположены в цилиндрических пусковых устройствах 5 и ориентированы в противоположные стороны под острым углом друг к другу. Контейнер 4 и цилиндрические пусковые устройства 5 закреплены на фюзеляже 6 БЛА-перехватчика 1. При этом возможно отсоединение от фюзеляжа 6 только контейнера 4, или контейнера 4 с цилиндрическими пусковыми устройствами 5.
Способ реализован следующим образом.
Как показано на фиг. 2, БЛА-перехватчик 1 с уложенной в нем сетью 2 приближается на заданное расстояние к БЛА-цели 7. Сеть 2 предварительно упакована в контейнер 4. При этом сеть 2 в одной из своих точек прикреплена к контейнеру 4, один из концов сети 2 прикреплен к БЛА-перехватчику 1, а два других конца сети 2 прикреплены к ракетам 3. Контейнер 4 размещают на БЛА-перехватчике 1.
После приближения в воздухе к БЛА-цели 7 с БЛА-перехватчика 1 сбрасывают контейнер 4 с сетью 2. Дополнительно с БЛА-перехватчика 1 пускают ракеты 3 с закрепленными на них концами сети 2 в разные стороны под углом к направлению полета БЛА-перехватчика 1, как показано на фиг 2. Возможен вариант, при котором от БЛА-перехватчика 1 отсоединяют контейнер 4 с сетью 2 и жестко связанные с ним пусковые устройства 5 ракет 3, из которых затем запускают ракеты 3. Любой из вариантов позволяет увеличить площадь сети 2 в развернутом виде и дает возможность ее перемещения в направлении полета БЛА-перехватчика 1.
БЛА-перехватчик 1 осуществляет вертикальный маневр вверх относительно направлений пуска ракет 3. БЛА-перехватчик 1, ракеты 3 и контейнер 4 растягивают сеть 2 в воздухе и продолжают полет с развернутой сетью 2 в сторону БЛА-цели 7. Это позволяет сохранить балансировку БЛА-перехватчика 1 после выброса сети 2, исключает его столкновения с БЛА-целью 7 и повышает вероятность захвата сетью 2 воздушной БЛА - цели 7.
В случае, если происходит контакт сети 2 и БЛА-цели 7 в воздухе превышается нагрузка на БЛА-перехватчик 1, от него отцепляют конец 8 сети 2.
В случае, если контакта сети 2 и БЛА-цели 7 не произошло, то по истечении заданного времени полета БЛА-перехватчика 1 после пуска сети 2, конец 8 сети 2 отцепляют от БЛА-перехватчика 1. Таким образом, в любом случае сеть 2 будет отцеплена от БЛА-перехватчика 1, что позволит ему продолжить полет, или совершить посадку. Дополнительно к этому появляется возможность сбрасывать следующие контейнеры с сетью, если ими был оборудован БЛА-перехватчик.
Это позволяет получить технический результат в виде увеличения площади сети 2 в развернутом виде и возможности ее перемещения в направлении полета ракет 3, сохранения балансировки БЛА-перехватчика 1 после выброса сети 2, исключения столкновения БЛА-перехватчика 1 с БЛА-целью 7.
Это позволяет решить задачу повышения вероятности захвата воздушной БЛА-цели 7 сетью 2.
Промышленная применимость
Возможно использование изобретения в нелетальных системах борьбы с БЛА как гражданскими, так и военными объектами. В целом, рассмотренный вариант выполнения изобретения был реализован на существующем в настоящее время оборудовании с использованием имеющихся материалов. Это подтверждает его работоспособность и промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ НАД ОБЪЕКТОМ | 2024 |
|
RU2838712C1 |
| УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2660998C1 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| СПОСОБ ЗАХВАТА МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2565863C2 |
| УСТРОЙСТВО - ИСТРЕБИТЕЛЬ ДЛЯ УНИЧТОЖЕНИЯ ДИСТАНЦИОННО ПИЛОТИРУЕМЫХ (БЕСПИЛОТНЫХ) ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ДПЛА) | 2012 |
|
RU2490584C1 |
| УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2750924C1 |
| СПОСОБ ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2755556C1 |
| СПОСОБ ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2661021C1 |
| УСТРОЙСТВО-ИСТРЕБИТЕЛЬ ДЛЯ ПОРАЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2767401C1 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
Изобретение относится к области захвата малогабаритных беспилотных летательных аппаратов (БЛА) и может быть использовано в военной технике. Способ захвата воздушной цели сетью включает в себя следующие операции: приближение БЛА-перехватчика с уложенной в нем сетью на заданное расстояние к БЛА-цели, отсоединение от БЛА-перехватчика метательных тел, к которым прикреплена сеть, разворачивание сети в воздухе, контакт сети и БЛА-цели в воздухе. В качестве метательных тел используют малогабаритные ракеты, сеть упаковывают в контейнер, который прикрепляют к одной из точек сети, контейнер размещают на БЛА-перехватчике, после приближения в воздухе к БЛА-цели с БЛА-перехватчика отсоединяют контейнер с сетью, один из концов которой прикреплен к БЛА-перехватчику, пускают ракеты с закрепленными на них концами сети в разные стороны под углом к направлению полета БЛА-перехватчика. При этом БЛА-перехватчик осуществляет вертикальный маневр вверх относительно направлений пуска ракет. БЛА-перехватчик, ракеты и контейнер растягивают сеть в воздухе и несут ее в сторону БЛА-цели. Технический результат - увеличение площади сети в развернутом виде и возможности ее перемещения в направлении полета, сохранение балансировки БЛА-перехватчика после выброса сети, исключение столкновения БЛА-перехватчика с БЛА-целью. Повышается вероятность захвата воздушной БЛА-цели сетью. 3 з.п. ф-лы, 2 ил.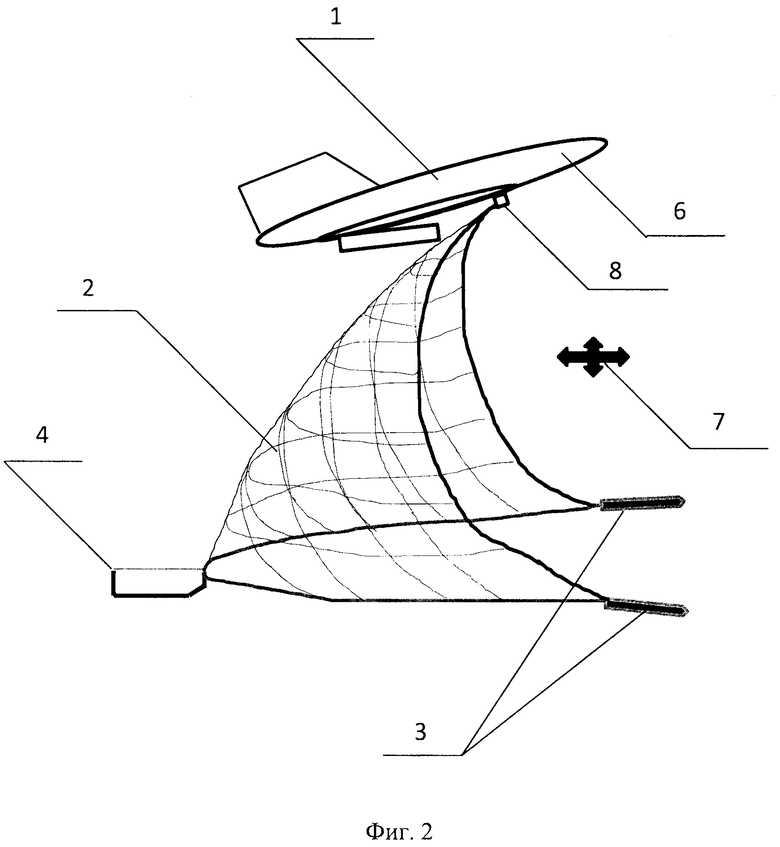
1. Способ захвата воздушной цели сетью, содержащий приближение БЛА-перехватчика с уложенной в нем сетью на заданное расстояние к БЛА-цели, отсоединение от БЛА-перехватчика метательных тел, к которым прикреплена сеть, разворачивание сети в воздухе, контакт сети и БЛА-цели в воздухе, отличающийся тем, что в качестве метательных тел используют малогабаритные ракеты, сеть упаковывают в контейнер, который прикрепляют к одной из точек сети, контейнер размещают на БЛА-перехватчике, после приближения в воздухе к БЛА-цели с БЛА-перехватчика отсоединяют контейнер с сетью, один из концов которой прикреплен к БЛА-перехватчику, пускают ракеты с закрепленными на них концами сети в разные стороны под углом к направлению полета БЛА-перехватчика, при этом БЛА-перехватчик осуществляет вертикальный маневр вверх относительно направлений пуска ракет, БЛА-перехватчик, ракеты и контейнер растягивают сеть в воздухе и несут ее в сторону БЛА-цели.
2. Способ захвата воздушной цели сетью по п. 1, отличающийся тем, что от БЛА-перехватчика отсоединяют контейнер с сетью и жестко связанные с ним пусковые устройства ракет, из которых затем запускают ракеты.
3. Способ захвата воздушной цели сетью по п. 1, отличающийся тем, что после попадания БЛА-цели в сеть и превышения нагрузки на БЛА-перехватчик от него отцепляют конец сети.
4. Способ захвата воздушной цели сетью по п. 1, отличающийся тем, что по истечении заданного времени полета после пуска сети ее отцепляют от БЛА-перехватчика, независимо от захвата БЛА-цели в сеть.
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| CN 107054678 B, 02.08.2019 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| CN 206847481 U, 05.01.2018 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| М.А | |||
| ДЕМЬЯНОВИЧ "Использование беспилотных летательных аппаратов в преступных целях: Методы противодействия и борьбы" // Правопорядок: История, теория, практика N 2 (21) / 2019, стр | |||
| Прибор, автоматически записывающий пройденный путь | 1920 |
|
SU110A1 |

