Изобретение относится к области систем обнаружения и борьбы с малогабаритными беспилотными летательными аппаратами (МБЛА) и может быть использовано в военной технике.
Известны различные системы управления средствами борьбы с воздушными целями, такие как способ применения беспилотных летательных аппаратов и устройство управления (патент №2457531), способ дистанционного управления полетом беспилотного летательного аппарата и беспилотная авиационная система (патент №2475802), система управления беспилотным летательным аппаратом (патент №2189625)[1-3].
Недостатками данных изобретений являются использование активного канала управления, наземного оборудования радиоуправления, использование нескольких аппаратов, набор комплексов, не оптимизированных для борьбы с МБЛА.
Известны различные способы наведения средств поражения на цели, такие как способ наведения оптического прицела на цель (патент №2217681), огневая секция (патент №2229668) [4, 5].
Недостатком является использование основного радиоканала обнаружения, конечное наведение осуществляется оператором по оптическому каналу и зависит от его профессионализма, т.е. велика ошибка, зависящая от человеческого фактора, в случае обнаружения МБЛА радиоканал и система наведения ракеты с головками самонаведения малоэффективны и очень дорого их применение, достаточно неуправляемых ракет на коротких расстояниях.
Известна так же система наведения объекта вооружения на цель (патент №2229670 прототип) [6].
Сущность изобретения заключается в следующем.
1. Система наведения объекта вооружения на цель, содержащая тепловизор, привод наводимого объекта вооружения, несущий на своем рабочем органе наводимый объект вооружения, бортовой компьютер, инфракрасную оптико-электронную систему с азимутальным приводом, причем бортовой компьютер соединен с инфракрасной оптико-электронной системой и тепловизором, отличающаяся тем, что она снабжена основанием, укрепленным на основании главным азимутальным цифровым или цифроаналоговым следящим приводом, механически связанным с рабочим органом главного азимутального следящего привода азимутальной платформой, выполненной с возможностью поворота в азимутальной плоскости, дальномером, укрепленным на азимутальной платформе угломестным цифровым или цифроаналоговым следящим приводом, мониторами и пультами управления, которые образуют рабочее место экипажа, причем на рабочем органе угломестного следящего привода укреплен тепловизор и дальномер, а привод наводимого объекта вооружения укреплен на азимутальной платформе и является угломестным цифровым или цифроаналоговым следящим приводом, при этом инфракрасная оптико-электронная система выполнена с круговым обзором, а бортовой компьютер отдельными электрическими или оптоэлектрическими каналами связан с инфракрасной оптико-электронной системой кругового обзора, тепловизором, дальномером, мониторами, пультами управления и с цифровыми блоками каждого цифрового или цифроаналогового следящего привода.
2. Система по п. 1, отличающаяся тем, что конфигурация рабочего места задана программой бортового компьютера в зависимости от состава экипажа и выполнена с возможностью перенастройки.
3. Система по п. 1, отличающаяся тем, что в состав бортового компьютера входят интерфейсы всех внешних устройств, к которым компьютер подключен.
4. Система по п. 1, отличающаяся тем, что при использовании в качестве объекта вооружения ракеты с головкой самонаведения бортовой компьютер соединен отдельным электрическим или оптоэлектронным каналом с головкой самонаведения ракеты.
Недостатками являются: сложность конструкции, большие размеры, высокая стоимость ракеты с головкой самонаведения, которая малоэффективна против малоразмерного МБЛА, использование одного теплового канала обнаружения, при незначительных температурных колебаниях между фоном и МБЛА малоэффективен, отсутствие системы автоматического выбора способа и средства поражения, не решена задача захвата и поражения МБЛА за преградами (дома, горы и т.д.).
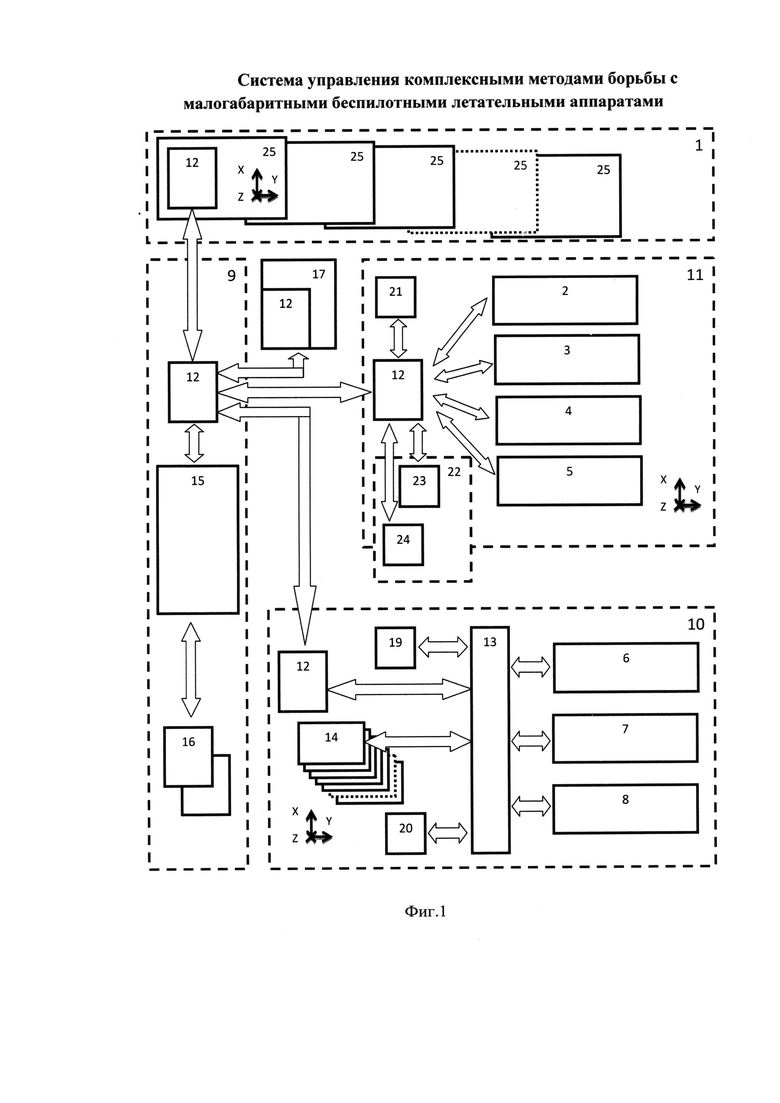
Изобретение системы для обнаружения и борьбы с МБЛА включает в себя систему обнаружения и прицеливания 1 (фиг. 1), а также системы скрытности 2, перехвата 3, подавления 4(7), поражения 5(8) и захвата 6, характеризующие параллельную работу в оптическом, звуковом и радиолокационном диапазонах электромагнитных волн. Предложенную систему обнаружения и борьбы с МБЛА возможно размещать как на стационарных объектах, так и на подвижных объектах (наземных, воздушных и морских). Система обнаружения и прицеливания 1 позволяет получить информацию в пассивном режиме, на основе которой система обработки информации и формирования команд 9, используя программный комплекс, строит достоверное трехмерное объемное изображения МБЛА на ЭВМ 15 (трехмерная графика на основе прикладных программ - DirectX, OpenGL). Система обработки информации и формирования команд 9 позволяет распознать МБЛА (сравнивая с базой данных, используя библиотеку на основе OpenCV), определить его дальнейшее направление движения и точку для прицеливания, захвата, перехвата, подавления, поражения МБЛА и скрытности от него объекта.
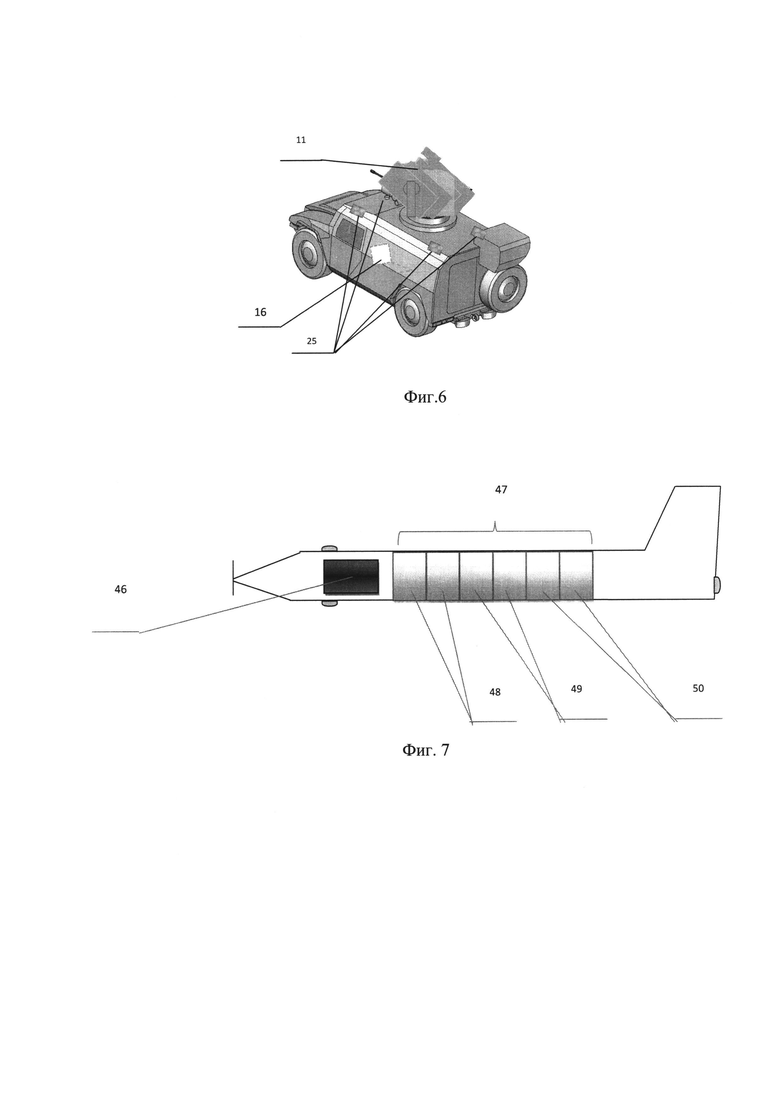
Для управления методами захвата, подавления и поражения с помощью МБЛА используется система управления МБЛА 10, для управления методами скрытности от МБЛА противника, его перехвата, подавления и поражения используется система управления боевой частью 11 (фиг.1), размещенных как на стационарных объектах и(или) на подвижных объектах, на земле и в море.
Система для обнаружения и борьбы с МБЛА основана на использовании оптического и радиоканала связи через приемо-передающие системы 12 (дублирующий канал проводной, на стационарных объектах) (на основе устройства БОКС-64). Система управления МБЛА работает на основе процессора 13 с искусственным интеллектом (на основе семейства процессоров Core i3), пяти и более камер кругового обзора 14 и механизмов управления МБЛА (на базе ПЗС матриц небольшого формата). Передача команд на процессор 13 осуществляется перед запуском МБЛА или в процессе охраны им воздушного пространства, через ЭВМ 15 с искусственным интеллектом и управлением с двух пультов управления, размещенных на объекте 16 и одного пульта управления выносного (в форме чемоданчика) 17. Навигация МБЛА осуществляется системой определения пространственных координат 19. Управление МБЛА осуществляет система управления МБЛА 20.
Система управления боевой части 11 работает на основе команд, формируемых системой обработки информации и формирования команд 9. Наведение систем 2, 3, 4, 5 осуществляется с помощью системы навигации и топопривязки боевой части 21 и системой вертикального и горизонтального наведения 22 (системы наведения по вертикали 23 и по горизонтали 24).
Полученные данные от системы обнаружения и прицеливания 1 в виде синхронизированных данных поступают в систему обработки информации и формирования команд 9, где с помощью программного комплекса производится обработка информации, и полученное изображение высвечивается на мониторах пультов управления 16 и 17. Изображение всего пространства на мониторе исследуется оператором, а также программным комплексом, основанным на работе искусственного интеллекта, по выбору наиболее опасного МБЛА и системы для борьбы с ним. Искусственный интеллект с помощью автоматически обновляющихся данных о МБЛА распознает их тип, вид и класс и предлагает оператору варианты боевой работы: «скрытность», «перехват», «захват», «подавление» или «поражение». Также есть автоматический режим, когда с разрешения оператора, искусственный интеллект управляет комплексными методами борьбы с МБЛА самостоятельно. Также с помощью «ручного управления» оператор с пультов управления 16 и 17 может сам управлять МБЛА и боевой частью для борьбы с МБЛА противника.
Система обнаружения и прицеливания 1 состоит из трех и более пространственно разнесенных точек обнаружения на гиростабилизирующих платформах 25, связанных между собой рабочими базами 26, автоматически определяющими расстояния между собой и свои пространственные координаты, что позволяет разместить их в любых удобных местах как на подвижном объекте, так и стационарном (фиг. 2). На каждой базе размещены по три датчика: датчик 27 (камера кругового обзора), работающий в оптическом диапазоне, датчик 28, работающий в акустическом диапазоне, и датчик 29, работающий в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн. Управление работой и обработкой полученной информации осуществляется ЭВМ 15 с элементами искусственного интеллекта, который сам выбирает наиболее эффективные датчики для более точного обнаружения и определения пространственных координат МБЛА и прицеливания средств поражения в различных условиях.
Рассчитанные пространственные координаты по информационному лазерному каналу (проводной резервный), через входное и выходное устройство, размещенные на гиростабилизированной платформе 12, поступают в боевую часть 32 системы поражения. Гиростабилизированная платформа 30 предназначена для устойчивой работы боевой части 32 и пакета направляющих 33, с кассетным заряжанием, для поражения МБЛА во время стрельбы, размещения блока питания, кругового беспроводного соединения 12 с ЭВМ 15 и крепления механизмов наведения двух пакетов направляющих 33 с шестнадцатью и более ракетами. Наведение пакета направляющих 33 осуществляется с помощью механизмов горизонтального наведения 24 (фиг. 3) и вертикального наведения 23 с помощью электродвигателей, питание которых поступает через вилку карданного подвеса 31. Ракета состоит из головной части с оперением для устойчивого полета, элементов поражения, взрывчатого вещества и детонатора с замедлителями, двигателя на твердом топливе. Установка таймера замедлителя и пуск ракеты производятся с помощью электродатчика сигналом, переданным с ЭВМ 15. Пуск ракеты осуществляется по выбору ЭВМ 15, в зависимости от класса, типа и вида МБЛА. Перезарядка осуществляется установкой кассетой ракет в направляющую 33.
Подвижная платформа 34 систем скрытности объекта от МБЛА, подавления и перехвата МБЛА установлена на верху боевой части 32, где размещается система навигации и топопривязки 21 (фиг. 3).
Система скрытности работает следующим образом (фиг. 4). Данные о вертикальном и горизонтальном углах наклона поступают на блок управления подвижной головки, в состав которого входят устройство наведения по вертикали 35, штанги крепления устройства наведения по вертикали и по высоте 36, механизм наведения по горизонтали 37 и подвижная головка 38, которые размещены на платформе устройства наведения по горизонтали и регулировки по высоте 34. Точное наведение подвижной головки с излучателем и приемником излучения достигается с помощью применения сверхчувствительных электродвигателей, обеспечивающих направление излучения на расстоянии до 20 км и более.
Таким образом, блок управления подвижной головки работает следующим образом: сигнал с ЭВМ 15 поступает на устройства наведения 37 и 35, которые поворачивают подвижную головку в сторону МБЛА одновременно с системой создания пространственных изображений 39 [7], а размещенная в ее корпусе на 180° топографическая видеокамера 40 [8] (осуществляющая съемку фоновой обстановки местности до размещения на нем объекта), снимает излучения от фона и объекта 41. Информация от топографической видеокамеры поступает на ЭВМ 15 о фонообъектной и фоновой обстановке вокруг объекта (фиг. 4). Программное обеспечение позволяет проконтролировать правильность наведения подвижной головки в сторону МБЛА и производить удаление объекта из кадров видеопоследовательности (заполнение на кадрах видеопоследовательности координат цвета объекта цветом фона) или замену на отснятую заранее, без объекта фоновую обстановку. С ЭВМ 15 обработанные кадры видеопоследовательности поступают на систему для создания пространственных изображений 39, откуда проецируется в сторону МБЛА топографическое изображение 42 фоновой обстановки, тем самым скрывая объекты в диапазоне частот видимого спектра.
Система подавления основана на использовании лазерного излучения в двух диапазонах электромагнитных волн, оптические квантовые генераторы (ОКГ) 43, которые размещены в корпусе подвижной головки 38 (фиг. 4). ОКГ, готовые к работе на момент наведения, испускают направленное лазерное излучение 44. Программное обеспечение позволяет определить пространственные координаты МБЛА, рассчитать мощность лазерного излучения, площадь светового ореола и отобразить их на мониторе. Одновременно с этим, программа позволяет сопоставлять исходные данные координат МБЛА на мониторе с вновь полученными данными о пространственных координатах МБЛА противника. С помощью корректирующих сигналов углоизмерительных устройств происходит более точное наведение светового ареола в пространстве на МБЛА.
Система перехвата работает на основе существующего комплекса «Шиповник» с помощью антенны 45 и аппаратуры, размещенной в верхней боевой части 21. В автоматическом режиме заглушает радиоканал управления МБЛА противника и блокирует его канал навигации. С помощью своего радиоканала управляет МБЛА противника в своих целях. Управление МБЛА противника может осуществляться как автоматически, так и в ручном режиме операторами, используя пульты управления 16 и 17.
Схема работы управления боевой части на стационарном объекте приведена на фиг. 5. Вариант размещения на подвижном объекте приведен на фиг. 6.
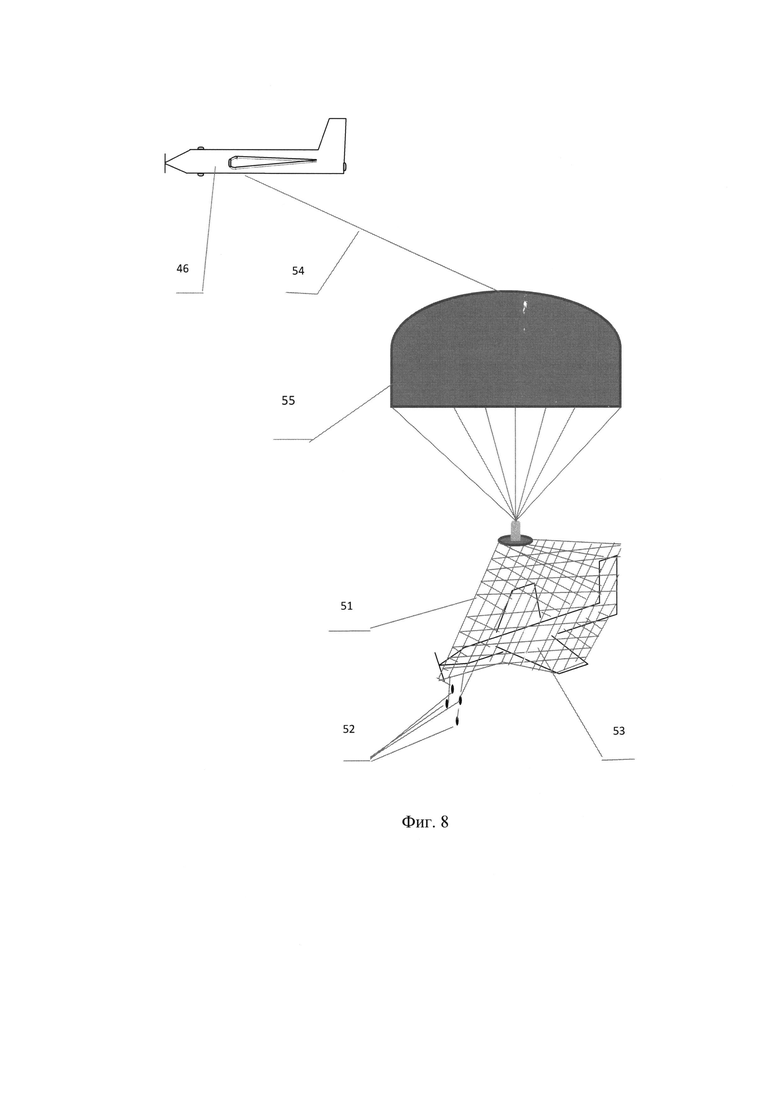
Система управления МБЛА работает следующим образом. МБЛА запускается при обнаружении системой обнаружения и прицеливания 1 МБЛА противника либо приступает к борьбе при патрулировании пространства (фиг. 7). Используя камеры кругового обзора, МБЛА ориентируется так, чтобы зайти выше, сзади или спереди МБЛА противника по встречному курсу, или с любой другой стороны, для точной сброски устройства борьбы. Используя бортовой процессор 46 (фиг. 7) на основе искусственного интеллекта, МБЛА заходит на рассчитанную высоту и дальность относительно МБЛА противника. Процессор подает команду на сброс одного из шести устройств борьбы, находящихся в специальных отсеках, открывающихся внизу фюзеляжа 47 (два устройства захвата 48, два устройства подавления 49 и два устройства поражения 50). При работе устройства захвата 48 сеть 51 со встроенным крепежным элементом посередине и парашютным отделением выстреливается с помощью пиротехнических патронов. Грузила 52 обеспечивают разворачивание сети 51 для захвата МБЛА 53. Высокопрочные полимерные нити и уравненная скорость полета МБЛА для захвата и МБЛА противника 53 обеспечивают высокую точность и дальность полета сети 51. В момент охвата МБЛА противника 53 сетью 51 грузила 52 запутываются на одной из сторон МБЛА противника 53. Происходит резкое падение МБЛА 53. Натягивается высокопрочная нить 54 между сетью 51 и устройством крепления в специальном отсеке 48, при этом парашют 55 раскрывается и начинает тормозить спуск захваченного МБЛА 53 (фиг. 8). МБЛА транспортирует в запрограммированный район либо выбирает наиболее благоприятный рельеф местности для успешной эвакуации захваченного МБЛА противника 53 и продолжает патрулирование пространства. В случае промаха по команде процессора 46 устройство крепления отпускает нить 54, МБЛА для захвата МБЛА 53 повторяет заход в атаку и производит повторный выстрел из другого отсека по МБЛА противника 53.
При работе устройство подавления 49, покинув отсек, раскрывает парашют 55 и устройство подавления спускается в расчетную точку пространства. В расчетной точке пространства с помощью детонатора происходит подрыв взрывчатого вещества, при взрыве которого элементы подавления, в виде красителя, не пропускающие свет в оптическом диапазоне электромагнитных волн, разлетаются по строго секционной направленности и попадания на оптические элементы приборов наблюдения и разведки МБЛА противника 53. Образованная пленка на оптических элементах МБЛА противника 53 взрывной волной и красителем приводит его в неработоспособное состояние, то есть к полному подавлению средств наблюдения и разведки в оптическом диапазоне электромагнитных волн.
При работе устройство поражения 50, покинув отсек, раскрывает парашют 55 и устройство поражения спускается на расчетную высоту. На расчетной высоте с помощью детонатора происходит подрыв взрывчатого вещества, при взрыве которого элементы поражения разлетаются по строго секционной направленности, имея максимальную эффективность поражения МБЛА противника 53. Изменяя структуру МБЛА противника 53 взрывной волной и элементами поражения, система приводит его в неработоспособное состояние или к полному уничтожению.
Источники информации
1. Шароварин Е.В., Малыгин И.В. Способ применения беспилотных летательных аппаратов и устройство управления. - ФИПС. Патент на изобретение №2457531, 27.07.2012 г.
2. Куликов В.Е., Сатовский Б.Л. Способ дистанционного управления полетом беспилотного летательного аппарата и беспилотная авиационная система. - ФИПС. Патент на изобретение №2475802, 27.07.2012 г.
3. Андриевский В.Р., Войнов Е.А., Куликов В.И., Никольцев В.А., Пахомов В.М., Плещенко О.Г., Подоплекин Ю.Ф., Симановский И.В., Соловьева В.В., Шаров С.Н. Система управления беспилотным летательным аппаратом. - ФИПС. Патент на изобретение №2189625, 20.09.2002 г.
4. Шипунов А.Г., Образумов В.И., Давыдов A.M., Сукачев Л.И., Пучков А.А., Поваров В.А. Способ наведения оптического прицела на цель. - ФИПС. Патент на изобретение №2217681, 09.04.2001 г.
5. Башкиров Л.Г., Демидов А.В., Капустин В.А., Кауфман Г.В., Каюмжий В.Н., Пигин Е.А., Сокиран В.И., Солнцев С.В. Огневая секция. - ФИПС. Патент на изобретение №2229668, 27.05.2004 г.
6. Ширнин В.Я., Кашин В.М., Качалин В.А., Молокин А.В., Лень Н.А., Смирнов А.Г., Фокин Р.В., Батехин С.Л., Родин Сова Юрий Владимирович, Вищук В.А. Система наведения объекта вооружения на цель. - ФИПС. Патент на изобретение №2229670, 27.05.2004 г.
7. Чоппе В., Брюггерт Т., Рельке И., Отте Ш., Клиппштайн М. Способ и система для создания пространственных изображений. - ФИПС. Патент на полезную модель RU №2323542, 25.02.2004.
8. Аниканов А.Г., Путилин А.Н., Ким Т. Оптическая система топографической видеокамеры. - ФИПС. Патент на полезную модель RU №2464608, 21.02.2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| МЕТОД ПОРАЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2572924C2 |
| ТЕРМОБАРИЧЕСКИЙ СПОСОБ БОРЬБЫ С РОЕМ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2733600C1 |
| СПОСОБ ГОЛОГРАФИЧЕСКОЙ СКРЫТНОСТИ ОБЪЕКТОВ ОТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2571534C2 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2565860C2 |
| СТАЦИОНАРНЫЙ КОМПЛЕКС ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2734267C1 |
| СПОСОБ ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ НАД ОБЪЕКТОМ | 2024 |
|
RU2838712C1 |
| СПОСОБ ЗАХВАТА МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2565863C2 |
| ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2021 |
|
RU2797976C2 |
| Устройство радиоэлектронного подавления беспилотных летательных аппаратов в зенитно-ракетном комплексе ближнего действия | 2023 |
|
RU2820537C1 |


Изобретение относится к системам обнаружения и борьбы с малогабаритными беспилотными летательными аппаратами (МБЛА). Изобретение содержит две системы поражения, систему управления боевой частью, пакет направляющих, ракету, систему обнаружения и прицеливания, систему управления боевой частью, систему навигации и топопривязки, систему горизонтального и вертикального наведения, систему скрытности, систему перехвата, систему подавления, блок питания, систему управления МБЛА, процессор, систему захвата, МБЛА со средствами борьбы, систему обработки и формирования команд с ЭВМ с элементами искусственного интеллекта. Обеспечивается эффективность борьбы с МБЛА. 5 з.п. ф-лы, 8 ил. 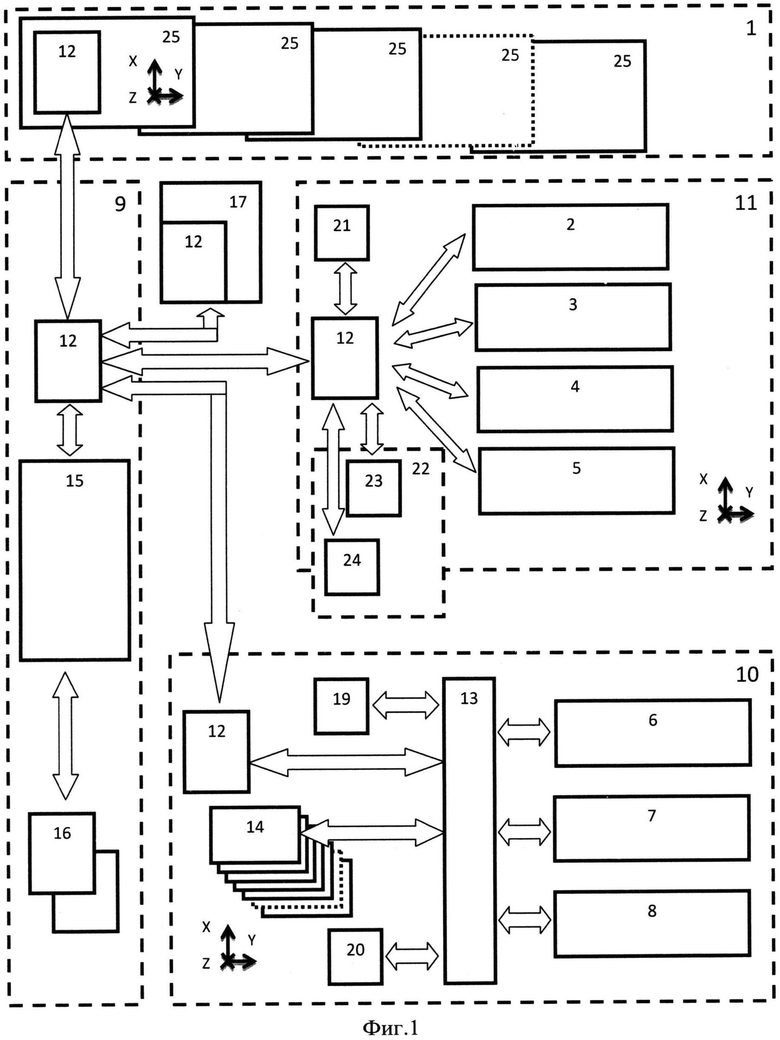
1. Система для обнаружения и борьбы с малогабаритными беспилотными летательными аппаратами (МБЛА), состоящая из системы поражения, боевой части, пакета направляющих, ракеты, состоящей из головной части, поражающих элементов, взрывчатого вещества, детонатора, системы обнаружения и прицеливания, системы управления боевой частью, системы навигации и топопривязки, системы горизонтального и вертикального наведения, системы скрытности, системы перехвата, системы подавления, системы поражения, блока питания, системы управления МБЛА, процессора, системы захвата, МБЛА со средствами борьбы, отличающаяся тем, что система обнаружения и прицеливания выполнена на трех и более пространственно разнесенных точках на гиростабилизирующих платформах, связанных между собой рабочими базами, автоматически определяющих расстояния между собой и свои пространственные координаты, что позволяет разместить в любых удобных местах как на подвижном, так и на стационарных объектах наземного, морского и воздушного базирования, на каждой базе размещены по три датчика, работающих в оптическом, акустическом и в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн, управление работой трех каналов и более и обработкой полученной информации и сигналов осуществляет система обработки информации и формирования команд, включающая в свой состав ЭВМ с элементами искусственного интеллекта.
2. Система для обнаружения и борьбы с МБЛА по п. 1, отличающаяся тем, что система обработки информации и формирования команд сама выбирает наиболее эффективные и пассивные каналы для более точного обнаружения и определения пространственных координат МБЛА в различных условиях ведения наблюдения, позволяет построить объемное 3D изображение МБЛА и сравнить с запрограммированными для их распознавания и прицеливания, выбирает наиболее эффективные средства поражения, подавления, захвата, перехвата МБЛА и скрытности по рассчитанным пространственным координатам МБЛА и осуществляет их управлением и контролем выполнения команд.
3. Система для обнаружения и борьбы с МБЛА по п. 1, отличающаяся тем, что система управления боевой части, состоящей из системы навигации и топопривязки, системы вертикального и горизонтального наведения, пакета направляющих с кассетным заряжанием, используя механизмы наведения в точку упреждения, с таймерами настраиваемых детонаторов ракеты с оперением одну из шестнадцати и более, проводит контроль поражения МБЛА и при необходимости осуществляет повторные и одновременные пуски как с двух пультов управления стационарных и одного выносного оператором, так по решению оператора в автоматическом режиме.
4. Система для обнаружения и борьбы с МБЛА по п. 1, отличающаяся тем, что система скрытности включает подвижную головку, в которой размещены относительно друг друга на 180° голографическая видеокамера и система создания пространственных изображений, которые создают голографическую проекцию фоновой обстановки в направлении МБЛА.
5. Система для обнаружения и борьбы с МБЛА по п. 1, отличающаяся тем, что система подавления включает два и более канала лазерного излучения на основе оптических квантовых генераторов, которые размещены в корпусе подвижной головки, система обработки информации и формирования команд позволяет рассчитать мощность лазерного излучения, площадь светового ореола и отобразить их на мониторе.
6. Система для обнаружения и борьбы с МБЛА по п. 1, отличающаяся тем, что управление МБЛА осуществляется с помощью системы управления МБЛА на основе использования процессора с искусственным интеллектом, системы навигации МБЛА, системы поражения с МБЛА, системы подавления с МБЛА и системы захвата и доставки МБЛА противника в район эвакуации.
| СИСТЕМА НАВЕДЕНИЯ ОБЪЕКТА ВООРУЖЕНИЯ НА ЦЕЛЬ | 2003 |
|
RU2229670C1 |
| RU 2002127298 А, 27.04.2004 | |||
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| WO 2003069257 A1, 21.08.2003. | |||

