Изобретение относится к военной технике, а также к области авиации, в частности к способам и методам захвата и поражения беспилотных летательных аппаратов (далее - БЛА).
Известен способ захвата малогабаритных беспилотных летательных аппаратов (далее - МБЛА) противника [Патент RU № 2565863 С2. - МПК: B64D 5/00, B64D 1/00, F41H 11/04, опубл. 20.10.2015 г. Бюл. № 24], основанный на использовании МБЛА, автоматической системы управления элементами искусственного интеллекта, сети из высокопрочной полимерной нити и грузил, где на МБЛА установлены камеры кругового обзора, позволяющие с помощью бортового процессора определять в пассивном режиме пространственные координаты МБЛА противника в оптическом диапазоне электромагнитных волн, выбирая определенную дальность и скорость полета, в нижней части фюзеляжа МБЛА размещены подряд отсеки для размещения сетей с грузилами и устройств их отстрела, а также устройства с автоматическим креплением высокопрочной полимерной нити, соединяющей парашют, для спуска захваченного в сеть МБЛА противника, транспортировки с помощью собственной тяги МБЛА в запрограммированный район с наиболее благоприятным рельефом местности для успешной эвакуации захваченного МБЛА противника.
Однако данный способ обладает низкой вероятностью захвата истинных целей, поскольку отсутствует возможность проводить разграничение целей при их групповой атаке по заданным критериям на истинные и ложные с последующей расстановкой приоритетности захвата с учетом высоты, скорости и траектории полета.
Также известен способ захвата БЛА [Патент RU № 2661021 С1. - МПК: В64С 39/02, B64D 5/00, B64D 1/00, опубл. 11.07.2018 г. Бюл. № 20], основанный на определении пространственных координат противника с его последующим захватом с помощью сетей с грузилами и устройства их отстрела, где устройство отстрела, выполненное в виде пушки, перемещается по траектории поперечного сечения поверхности фюзеляжа и вращается в горизонтальной и вертикальной плоскостях вокруг своей оси. Данный способ взят за прототип.
Однако данный способ также обладает низкой вероятностью захвата истинных целей, ввиду отсутствия возможности проводить разграничение целей при их групповой атаке по заданным критериям на истинные и ложные с последующей расстановкой приоритетности захвата.
Техническим результатом предлагаемого способа захвата беспилотных летательных аппаратов является повышение вероятности захвата истинных целей (БЛА противника), основанной на селекции движущихся целей с последующей расстановкой приоритетности их захвата по заданным критериям.
Указанный технический результат достигается тем, что в известном способе захвата беспилотных летательных аппаратов, который основан на определении пространственных координат БЛА, наведении устройства отстрела и запуске раскрывающейся капсулы с сетью и грузилами в направлении на БЛА, отличающийся тем, что производится определение количества подлежащих захвату БЛА, и если N≥2, где N - количество БЛА в воздухе, то дополнительно производят селективный анализ БЛА противника и определяют высоту, скорость и траекторию полета каждого БЛА, с использованием которых рассчитывают коэффициент приоритетности захвата, и в первую очередь осуществляют захват БЛА, для которого коэффициент приоритетности захвата будет максимальным.
Сущность изобретения заключается в том, что производится определение количества подлежащих захвату БЛА, и если N≥2, где N - количество БЛА в воздухе, то дополнительно производят селективный анализ БЛА противника и определяют высоту, скорость и траекторию полета каждого БЛА, с использованием которых рассчитывают коэффициент приоритетности захвата, и в первую очередь осуществляют захват БЛА, для которого коэффициент приоритетности захвата будет максимальным.
Повышение вероятности захвата истинных целей БЛА противника обеспечивается следующим образом.
В момент обнаружения БЛА противника с помощью оптико-электронных камер кругового обзора определяется количество БЛА противника и их пространственные координаты. Далее полученные данные (пространственные координаты БЛА противника и их количество) передаются на бортовой вычислительный комплекс, который производит расчет высоты и корректировку данных, в частности пространственных координат, например, с помощью алгоритма [Абрамовская М.В. Разработка алгоритма определения координат объекта при заданном направлении линии визирования // Вестник новгородского государственного университета. № 4(95). 2016. С.7-9], их скорости и траектории полета, например, с помощью алгоритма [Яковлев К.С., Макаров Д.А., Баскин Е.С. Метод автоматического планирования траектории беспилотного летательного аппарата в условиях ограничений на динамику полета // «Моделирование и управление». Искусственный интеллект и принятие решений. № 4. 2014. С.3-17].
Затем бортовой вычислительный комплекс передает сигнал на блок управления, который выдает команду на работу блока селекции. После поступившей команды блок селекции, который может быть выполнен, как устройство селекции сигналов движущихся целей, проводит селективный анализ БЛА противника с целью разграничения истинных и ложных целей, например, с помощью алгоритма [Ефремов B.C. Адаптивные системы селекции движущихся целей в радиолокаторах управления воздушным движением // Вестник МГТУ им. Н.Э. Баумана. Сер. «Приборостроение», 2007. № 2. С.3-16].
Затем сгенерированные данные от блока селекции передаются на блок приоритетности захвата, который может быть выполнен как микропроцессор с заданным алгоритмом расчета [Золотухин С.И., Дьяков Д.Е., Зибров Р.С., Котляров П.С. Точность расчетов при применении способа выбора рационального решения // Журнал «Современные наукоемкие технологии». 2019. № 10. Часть 2. С.252-256]. Блок приоритетности захвата определяет наиболее рациональную и приоритетную цель для захвата по заданным критериям оценки, учитывая приведенные данные с блока селекции. После произведения критериальной оценки блок приоритетности захвата передает сгенерированные данные о приоритетной цели захвата на бортовой вычислительный комплекс, который в свою очередь выдает команду на захват.
Тем самым достигается указанный в изобретении технический результат.
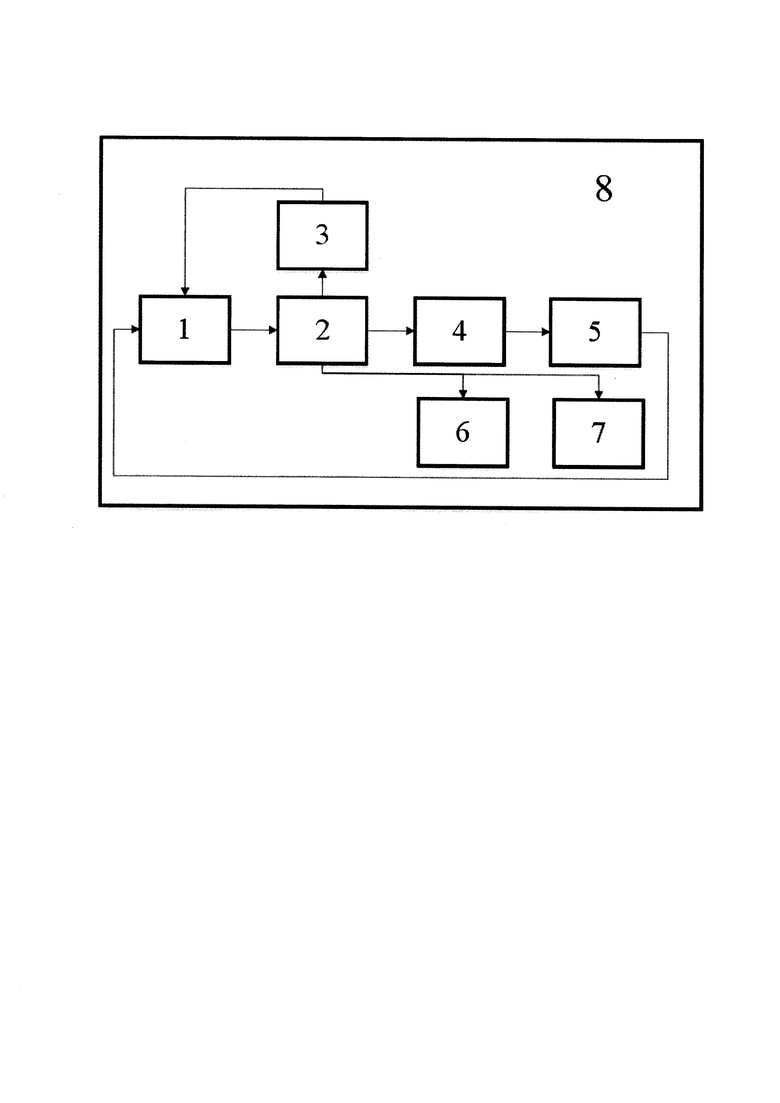
На фигуре изображена схема, отображающая алгоритм работы способа захвата БЛА. Введем следующие обозначения: 1 - бортовой вычислительный комплекс, 2 - блок управления, 3 - оптико-электронные камеры кругового обзора, 4 - блок селекции, 5 - блок приоритетности захвата, 6 - механизм наведения, 7 - устройство отстрела, 8 - БЛА; 9 - БЛА противника, 10 - сеть, 11 - грузила, 12 - капсула, 13 - парашют.
При попадании БЛА противника 9 в зону действия оптико-электронных камер кругового обзора 3, подается сигнал об обнаружении БЛА противника 9 на бортовой вычислительный комплекс 1. Затем бортовой вычислительный комплекс 1 передает сигнал на блок управления 2, который в свою очередь выдает команду на оптико-электронные камеры кругового обзора 3 на определение количества БЛА противника 9 и их пространственные координаты. Далее полученные данные с оптико-электронных камер кругового обзора 3 (пространственные координаты БЛА противника и их количество) передаются на бортовой вычислительный комплекс 1, который производит расчет высоты с корректировкой данных по пространственным координатам, скорости и траектории полета БЛА противника 9.
Затем бортовой вычислительный комплекс 1 передает сигнал на блок управления 2, который задает команду на работу блока селекции 4. После поступившей команды блок селекции 4 производит разграничение БЛА противника 9 при их групповой атаке по заданному алгоритму на истинные и ложные цели. Далее сгенерированные данные от блока селекции 4 передаются на блок приоритетности захвата 5. Блок приоритетности захвата 5 определяет наиболее рациональную и приоритетную цель для захвата по заданным критериям оценки, учитывая информацию, поступившую с блока селекции 4. После произведения критериальной оценки блок приоритетности захвата 5 передает сгенерированные данные о приоритетной цели захвата на бортовой вычислительный комплекс 1.
Бортовой вычислительный комплекс 1, основываясь на полученных данных от блока приоритетности захвата 5, выдает команду не блок управления 2 о произведении захвата БЛА противника 9. Далее блок управления 2 выдает сигнал о работе на механизм наведения 6, который выставляет устройство отстрела 7 под нужным углом в необходимом направлении для осуществления захвата. После этого блок управления 2 выдает команду на устройство отстрела 7 на осуществление выстрела капсулой 12 по БЛА противника 9. В момент прохождения заданного пути до БЛА противника 9 капсула 12 раскрывается и из нее вылетает сеть 10 с грузилами 11 и парашют 13, посредством которых осуществляется захват БЛА противника 9 и последующее его приземление.
Затем производится повторный анализ воздушной обстановки с учетом того был ли промах или нет. После чего принимается решение на осуществление захвата цели. В случае промаха последовательность действий для осуществления захвата аналогична.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2750924C1 |
| УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2660998C1 |
| СПОСОБ ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2661021C1 |
| СПОСОБ ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ НАД ОБЪЕКТОМ | 2024 |
|
RU2838712C1 |
| СПОСОБ ЗАХВАТА ВОЗДУШНОЙ ЦЕЛИ СЕТЬЮ | 2020 |
|
RU2745590C1 |
| СПОСОБ ЗАХВАТА МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2565863C2 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСНЫМИ МЕТОДАМИ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2014 |
|
RU2578524C2 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| СПОСОБ ПОВЫШЕНИЯ ЖИВУЧЕСТИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, ПРЕОДОЛЕВАЮЩИХ ЗОНЫ РАДИОТЕХНИЧЕСКОГО ПРОТИВОДЕЙСТВИЯ И АКТИВНОГО ПОРАЖЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2367893C2 |
Изобретение относится к способу захвата беспилотных летательных аппаратов (БЛА). Для захвата БЛА определяют количество подлежащих захвату БЛА, если их больше одного, осуществляют селекцию БЛА противника и определяют высоту, скорость и траекторию полета каждого БЛА, с использованием которых рассчитывают коэффициент приоритетности захвата, и в первую очередь осуществляют захват БЛА, для которого коэффициент приоритетности захвата будет максимальным. Обеспечивается повышение вероятности захвата целей. 1 ил.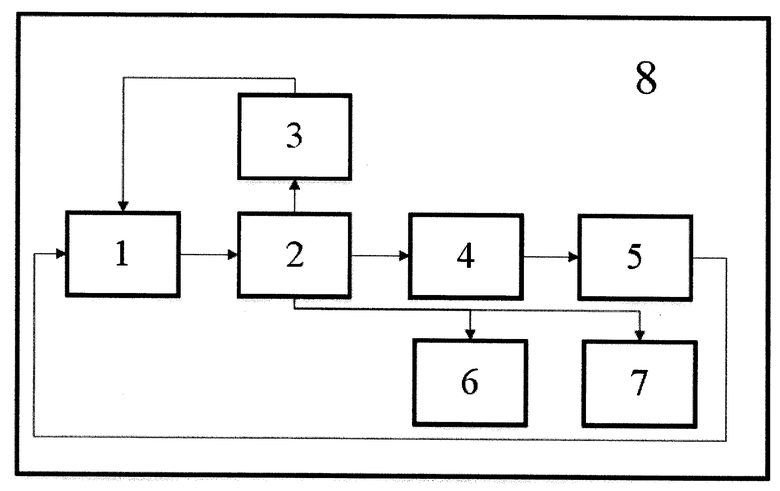
Способ захвата беспилотных летательных аппаратов, основанный на определении пространственных координат БЛА, наведении устройства отстрела и запуске раскрывающейся капсулы с сетью и грузилами в направлении на БЛА, отличающийся тем, что производят определение количества подлежащих захвату БЛА, и если N≥2, где N - количество БЛА в воздухе, то дополнительно осуществляют селекцию БЛА противника и определяют высоту, скорость и траекторию полета каждого БЛА, с использованием которых рассчитывают коэффициент приоритетности захвата, и в первую очередь осуществляют захват БЛА, для которого коэффициент приоритетности захвата будет максимальным.
| RU 72753 U1, 27.04.2008 | |||
| УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2660998C1 |
| УСТРОЙСТВО - ИСТРЕБИТЕЛЬ ДЛЯ УНИЧТОЖЕНИЯ ДИСТАНЦИОННО ПИЛОТИРУЕМЫХ (БЕСПИЛОТНЫХ) ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ДПЛА) | 2012 |
|
RU2490584C1 |
| CN 106995059 A, 01.08.2017 | |||
| CN 107990787 B, 14.01.2020 | |||
| СИСТЕМА И СПОСОБ ПРЕДОТВРАЩЕНИЯ НАРУШЕНИЙ ПРАВИЛ ПОЛЕТОВ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2701421C1 |

