Предпосылки к созданию изобретения и существующие технические решения
Настоящее изобретение относится к доильному роботу, предназначенному для работы с доильными стаканами доильного аппарата и моющими стаканами для очистки сосков животного перед дойкой. Доильный робот выполнен таким образом, что моющие стаканы и/или доильные стаканы присоединяются к соскам животного. В частности, изобретение относится к доильному роботу согласно предварительной характеризующей части пункта 1. Изобретение относится также к системе доения.
Известно применение промышленных роботов в обрабатывающей промышленности. Известно также использование промышленного робота как так называемого доильного робота в связи с доением животных, см., например, патент ЕР-А-900522.
Промышленный робот является, согласно европейскому стандарту “European Standard EN ISO 102018-1:2008”, автоматически управляемым, перепрограммируемым многоцелевым манипулятором, программируемым по трем или более осям, который может быть или зафиксирован на месте, или подвижным для использования в промышленных автоматизированных областях.
Одной известной проблемой, связанной с промышленными роботами, является явление сингулярностей. Существует несколько причин для сингулярностей. Внутренними сингулярностями рабочего пространства являются те, которые возникают внутри, но на удалении от границы рабочего пространства и обычно вызываются центровкой двух или более осей сочленения, см. Introduction to ROBOTICS; mechanics and control; second edition; John J.Craig, 1995; page 173 (Введение в робототехнику; механика и управление; второе издание; Джон Дж.Крейг, 1995; стр.173). Сингулярность возникает в стыке многозвенного робота в случае, когда ускорение одного звена должно быть бесконечным. Другими словами, сингулярность означает, что робот может выбирать между двумя или более положениями звена для того, чтобы достичь произвольного положения в трехмерном рабочем пространстве. При возникновении сингулярности промышленный робот может выйти из-под контроля и, таким образом, оказаться небезопасным.
Доильный робот, описанный в ЕР-А-900522, содержит первое звено, которое может поворачиваться вокруг первой вертикальной оси до первого угла в пределах первого углового сектора через первое соединение, второе звено, прикрепленное к первому звену, которое может поворачиваться вокруг второй оси до второго угла в пределах второго углового сектора через второе соединение, и третье звено, прикрепленное ко второму звену, которое может поворачиваться вокруг третьей оси до третьего угла в пределах третьего углового сектора через третье соединение. К третьему звену прикреплен зажим.
Зажим в ЕР-А-900522 может поворачиваться вокруг первой оси вращения, будучи параллельным третьему звену, и вокруг второй оси вращения, будучи перпендикулярным первой оси вращения, для того чтобы позволять зажиму удерживать доильный стакан в вертикальном положении или в наклонном положении, соответствующем возможному наклону сосков. Однако в связи с тем, что зажим может поворачиваться вокруг второй оси вращения, возникает сингулярность. При заданном наклоне или положении зажима относительно второй оси вращения возможны несколько значений первого, второго и третьего углов. Соответственно конструкция, показанная в ЕР-А-900522, может не рассматриваться как достаточно безопасная во всех возможных ситуациях, которые могут возникнуть в доильном отделении или во время операции доения.
Сущность изобретения
Задачей изобретения является предложение доильного робота с простой, недорогой и легкой конструкций. Кроме того, задачей изобретения является предложение такого доильного робота, который безопасен и который может использоваться среди животных и людей, не подвергая их какой-либо опасности. Кроме того, оно направлено на доильный робот, который совместим с усилиями, создаваемыми животным, и достаточно жесток, так что может быть достигнута достаточная точность.
Этой задачи достигают с помощью первоначально описанного доильного робота, который отличается тем, что каждое положение рабочего органа в рабочем пространстве соответствует единственному сочетанию первого, второго и третьего углов.
Путем такого ограничения движений первого, второго и третьего звеньев можно гарантировать, что никакой сингулярности не произойдет. Доильный робот согласно изобретению является безопасным в том смысле, что движение звеньев в любом произвольном положении в рабочем пространстве может прогнозироваться. Ограничение движений достигается путем ограничения количества осей (степеней свободы) и/или ограничения угловых секторов.
Благодаря ограниченному количеству звеньев затраты на изготовление доильного робота могут быть относительно низкими, а конструкция может быть относительно легкой и простой.
Согласно варианту реализации изобретения вращательная способность первого звена, второго звена и третьего звена ограничивается посредством первого, второго и третьего ограничительных средств соответственно, так что рабочий орган удерживается внутри рабочего пространства. Первое, второе и третье ограничительные средства приспособлены для того, чтобы ограничивать соответственно первый, второй и третий угловые сектора.
Согласно дальнейшему варианту реализации изобретения первое, второе и третье ограничительные средства содержат соответствующие физические ограничительные элементы. Такие физические ограничительные элементы могут содержать поверхности прилегания, которые очерчивают конечные положения звеньев и ограничивают, таким образом, движение звеньев.
Согласно другому варианту реализации изобретения первое, второе и третье ограничительные средства содержат программное обеспечение, составленное блоком управления. Такое программное ограничительное средство может быть представлено как альтернатива или дополнение к физическим ограничительным средствам. Согласно дальнейшему варианту реализации изобретения рабочее пространство сходится на конус по направлению к линии, которая совпадает с предпочтительно вертикальной линией, проходящей через первое соединение, или с первой осью. Например, рабочее пространство может иметь треугольное продление, наблюдаемое в направлении первой оси. Первая ось, вокруг которой вращается первое звено, может быть вертикальной, причем рабочее пространство от первой оси расширяется в направлении места доения, в котором присутствует животное, предназначенное для доения. Первая ось может также быть горизонтальной, причем рабочее пространство расширяется от указанной предпочтительно вертикальной линии в направлении места доения, в котором присутствует животное, предназначенное для доения.
Согласно дальнейшему варианту реализации изобретения рабочий орган содержит центральную точку, которая определяет положение рабочего органа в алгоритме управления, включенном в управляющий блок и предназначенном для управления доильным роботом. В результате при очерчивании положения рабочего органа в блоке управления очерчивается центральная точка. Расстояние и угол от центральной точки до, например, доильного стакана могут быть добавлены алгоритмом управления как поправочная величина. Предпочтительно алгоритм управления блока управления может быть затем приспособлен для расчета первого, второго и третьего углов звеньев для определенного положения центральной точки. Далее, третье звено может иметь продольную центральную ось, причем центральная точка помещается на продольной центральной оси.
Согласно дальнейшему варианту реализации изобретения рабочий орган выполнен как захват, прикрепленный к третьему звену, который имеет продольную центральную ось, причем захват может поворачиваться на 180° вокруг продольной центральной оси. Предпочтительно захват может поворачиваться вокруг продольной центральной оси для того, чтобы занимать положение захвата и положение применения, находящееся в 180° от положения захвата относительно продольной центральной оси. Положение захвата может быть положением, при котором захват приспособлен для того, чтобы захватывать доильный стакан из магазина доильных стаканов, помещенного в месте доения рядом с животным. Положение применения является положением захвата, пригодным для применения доильного стакана для доения животного, предназначенного к доению.
Согласно дальнейшему варианту реализации изобретения захват содержит захватывающий элемент, который поворачивается вокруг пятой оси, идущей перпендикулярно продольной центральной оси, от первого положения захватывающего элемента до второго положения захватывающего элемента. Благодаря способности поворачиваться вокруг пятой оси захватывающий элемент может быть выведен из зрительной оси датчика. Предпочтительно захватывающий элемент смещается в первое положение захватывающего элемента.
Согласно дальнейшему варианту реализации изобретения рабочий орган образуется третьим звеном. Предпочтительно рабочий орган может быть выполнен так, чтобы содержать сопло для подачи текучей среды на объект, такое как распылительное сопло для распыления после обработки жидкости на сосок в то время, когда доильный стакан снимают после доения.
Согласно другому варианту реализации изобретения первое звено имеет первую активную длину, второе звено - вторую активную длину и третье звено - третью активную длину, причем вторая и третья активные длины по меньшей мере в два раза превышают первую активную длину или в котором первая и вторая активные длины по меньшей мере в два раза превышают третью активную длину. При использовании двух звеньев с относительно большой длиной изменение угла захвата может быть уменьшено или сведено к минимуму, что улучшает способность датчика воспринимать соски животного.
Согласно дальнейшему варианту реализации изобретения исполнительный механизм первого соединения, исполнительный механизм второго соединения и исполнительный механизм третьего соединения содержат соответственно первое, второе и третье согласующие средства, приспособленные для того, чтобы допустить движение соответствующего звена в ответ на приложенное извне усилие в случае, когда внешнее усилие превышает заданное значение. В результате доильный робот может быть податлив к большим усилиям, приложенным животным так, что уменьшается опасность повреждения доильного робота. Предпочтительно исполнительный механизм первого соединения, исполнительный механизм второго соединения и исполнительный механизм третьего соединения содержат соответствующий гидравлический исполнительный механизм, действующий с использованием рабочей жидкости, причем согласующие средства содержат по меньшей мере один перепускной клапан, приспособленный для того, чтобы открываться для рабочей жидкости в случае, когда внешнее усилие превышает заданное значение.
Цель изобретения достигается также с помощью системы доения, содержащей доильное помещение, содержащее несколько мест доения, каждое из которых приспособлено для размещения животного, предназначенного для доения, и каждое содержит магазин доильных стаканов и по меньшей мере один доильный робот, помещенный рядом с доильным помещением. Предпочтительно доильное помещение содержит поворотную доильную платформу.
Согласно дальнейшему варианту реализации изобретения система доения содержит по меньшей мере одно несущее устройство, приспособленное для расположения рядом с поворотной доильной платформой и для того, чтобы нести доильный робот, и управляющее средство, предназначенное для управления несущим устройством с поддержкой доильного робота для следования за вращением поворотной доильной платформы так, чтобы доильный робот находился в фиксированном положении относительно одного из мест доения поворотной доильной платформы.
Настоящее изобретение будет описано более подробно путем описания различных вариантов реализации и со ссылкой на прилагаемые чертежи.
На фиг.1 схематически показан вид сверху части системы доения;
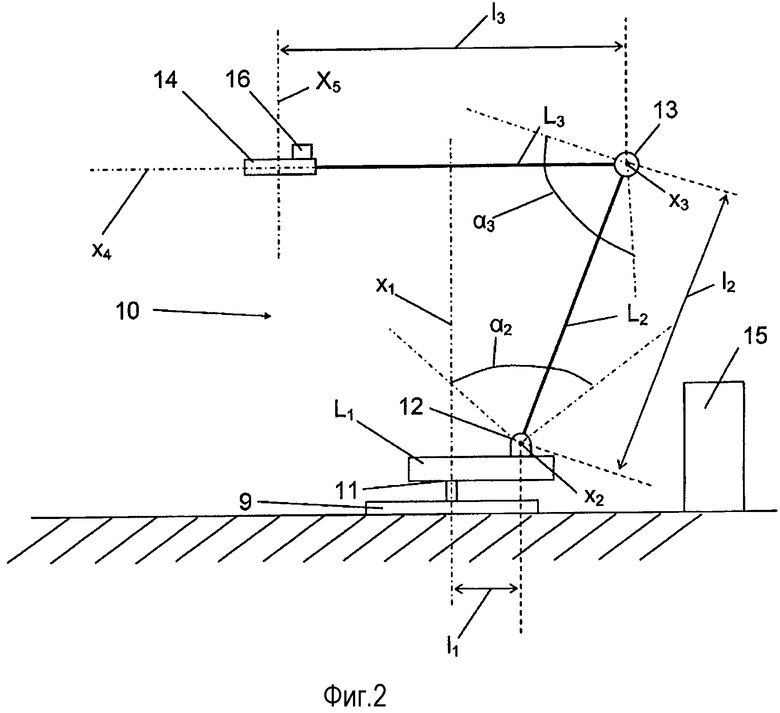
на фиг.2 схематически показан вид сбоку доильного робота согласно первому варианту реализации системы доения с фиг.2;
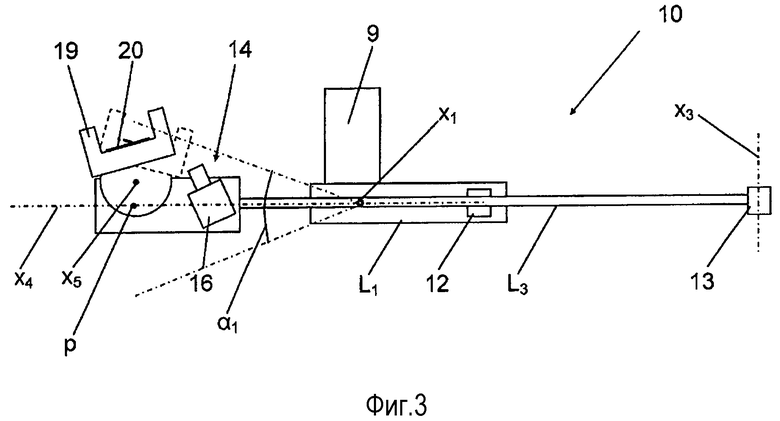
на фиг.3 схематически показан вид сверху части доильного робота с фиг.2;
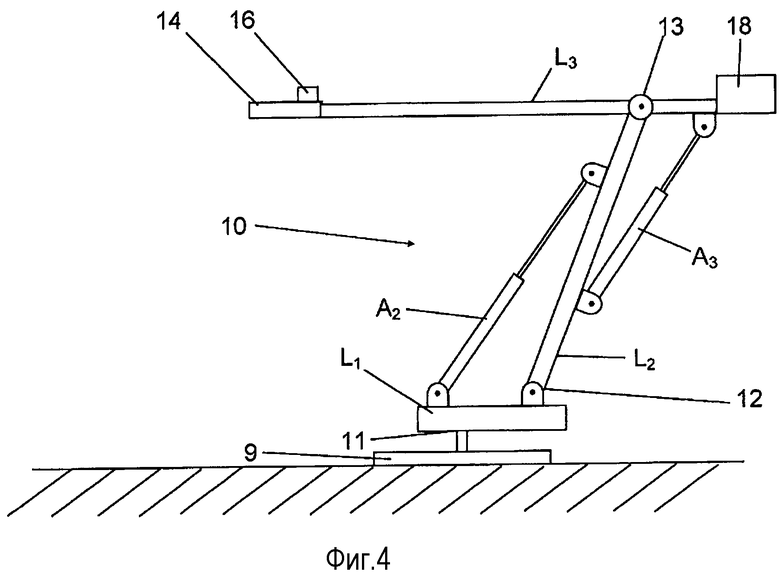
на фиг.4 показан вид сбоку доильного робота согласно первому варианту реализации;
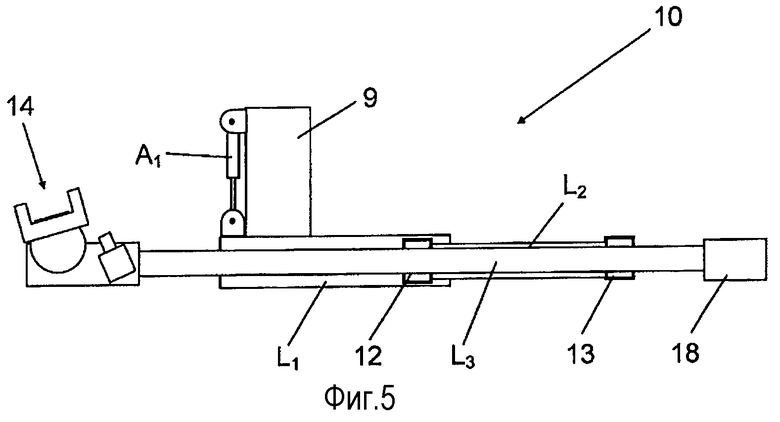
на фиг.5 показан вид сверху доильного робота с фиг.4;
на фиг.6 показан вид сбоку исполнительного механизма доильного робота с фиг.4;
на фиг.7 схематически показан вид сбоку доильного робота согласно второму варианту реализации системы доения с фиг.1;
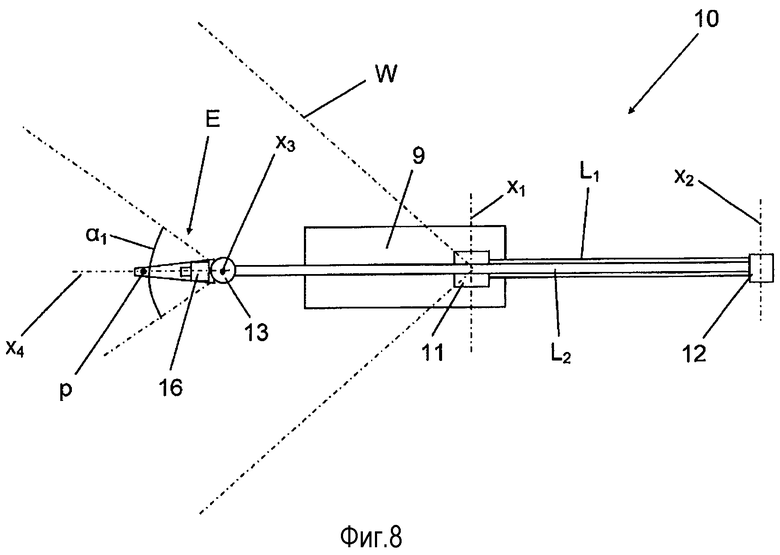
на фиг.8 схематически показан вид сверху части доильного робота с фиг.7;
на фиг.9 показан вид в перспективе доильного робота согласно второму варианту реализации;
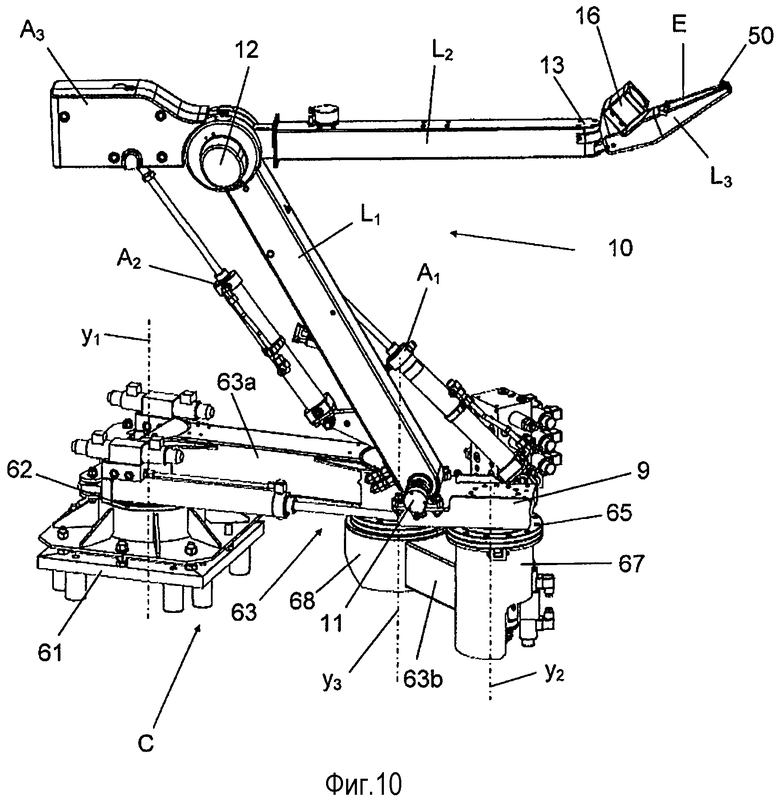
на фиг.10 показан вид в перспективе доильного робота с фиг.9, установленного на фиксирующем устройстве.
Подробное описание различных вариантов реализации изобретения
На фиг.1 показана система доения, которая содержит доильное помещение и два доильных робота. В показанных вариантах реализации доильное помещение содержит или имеет форму поворотной доильной платформы 1. Следует отметить, что доильное помещение может также иметь другую конструкцию, такую как помещение в форме «елочка» и т.п. Поворотная доильная платформа 1 может вращаться вокруг вертикальной оси платформы (не показана). Поворотная доильная платформа 1 содержит несколько мест доения 2, размещенных по кругу на поворотной доильной платформе 1. Каждое место доения 2 содержит доильный аппарат (не описан), содержащий доильный элемент, имеющий несколько доильных стаканов 3, обычно четыре доильных стакана 3. Каждое место доения 2 содержит также магазин доильных стаканов 4, предназначенный для содержания доильных стаканов 3 в период между операциями доения. Доильные стаканы 3 содержатся в перевернутом положении в магазине доильных стаканов 4, т.е. отверстие в доильном стакане 3 повернуто вниз в то время, когда доильный стакан 3 содержится в магазине доильных стаканов 4.
Система доения содержит также чистящее устройство 7, имеющее моющий стакан 8. Чистящее устройство 7 в описанном варианте реализации располагается снаружи поворотной доильной платформы 1.
В описанных вариантах реализации система доения содержит два доильных робота 10. Один из доильных роботов 10 приспособлен для удерживания моющего стакана 8 и присоединения моющего стакана 8 к соску животного, предназначенного для доения, для того чтобы очищать соски перед операцией доения, т.е. перед присоединением доильного стакана к соску. Другой доильный робот 10 предназначен для присоединения доильных стаканов 3 к соскам животного. Следует отметить, что доильная система может включать в себя меньше или больше доильных роботов 10, например два или больше доильных роботов для очистки и два или больше доильных роботов 10 для присоединения доильных стаканов. Можно также включать только один доильный робот 10, который может быть приспособлен для присоединения сначала моющего стакана 8 и затем, после операции очистки, для присоединения к соскам животного доильных стаканов 3.
Конфигурация первого варианта реализации доильного робота 10 будет теперь объяснена более подробно со ссылкой на фиг.2-6. Как можно видеть, доильный робот 10 является трехзвенным роботом с тремя осями и содержит первое звено L1, второе звено L2 и третье звено L3. Первое звено L1 присоединено к базовому элементу 9 и может поворачиваться вокруг первой оси х1 до первого угла в пределах первого углового сектора α1 через первое соединение 11 посредством исполнительного механизма А1 первого соединения. Второе звено L2 присоединено к первому звену L1 и может поворачиваться вокруг второй оси х2 до второго угла в пределах второго углового сектора α2 через второе соединение 12 посредством исполнительного механизма А2 второго соединения. Третье звено L3 присоединено ко второму звену L2 и может поворачиваться вокруг третьей оси х3 до третьего угла в пределах третьего углового сектора α3 через третье соединение 13 посредством исполнительного механизма А3 третьего соединения. Базовый элемент 9 может быть установлен на грунте.
Первое звено L1 может поворачиваться вокруг первой оси х1 в пределах первого углового сектора α1 относительно первой оси х1. Второе звено L2 может поворачиваться вокруг второй оси х2 до второго угла в пределах второго углового сектора α2 относительно второй оси х2. Третье звено L3 может поворачиваться вокруг третьей оси х3 до второго угла в пределах третьего углового сектора α3 относительно второй оси х3.
Доильный робот 10 содержит также рабочий орган Е. В первом варианте реализации рабочий орган Е содержит или выполнен как захват 14, который присоединен к третьему звену L3. Первое звено L1, второе звено L2 и третье звено L3 могут поворачиваться так, что захват 14 может двигаться в пределах трехмерного рабочего пространства W, см. фиг.1, доильного робота 10.
Кроме того, доильный робот 10 содержит блок управления 15 и датчик 16. Датчик 16 приспособлен для того, чтобы воспринимать положение объекта, такого как доильный стакан в магазине доильных стаканов 4, и сосок животного, находящегося на месте доения 2. Датчик 16 может быть любого подходящего вида, такого как видеокамера, лазерный датчик или камера времени пролета. Блок управления 15 приспособлен для управления исполнительным механизмом А1 первого соединения, исполнительным механизмом А2 второго соединения и исполнительным механизмом А3 третьего соединения для продвижения захвата 14 в положение, воспринимаемое датчиком 16. Блок управления 15 содержит необходимое аппаратное и программное обеспечение, включая алгоритм управления, приспособленный для контроля движения исполнительных механизмов соединений А1, А2 и А3.
Как можно видеть на фиг.1, рабочее пространство W сходится на конус в направлении первой оси х1 при наблюдении сверху. При таком наблюдении рабочее пространство W имеет треугольную форму. Рабочее пространство W является трехмерным и простирается также в направлении по вертикали. В описанном варианте реализации рабочее пространство W ограничено так, что оно сходится на конус в направлении линии, совпадающей с первой осью х1. В описанных вариантах реализации эта линия и первая ось х1 являются вертикальными. Таким образом, рабочее пространство расширяется от линии или первой оси х1 в направлении места доения 2.
Рабочий орган Е - в первом варианте реализации - захват 14 содержит центральную точку р, см. фиг.3, которая отмечает положение захвата в алгоритме управления. Как можно видеть на фиг.3, третье звено L3 имеет также центральную ось х4. Центральная точка р захвата 14 помещается на продольной центральной оси х4.
Захват 14 может поворачиваться на 180° вокруг продольной центральной оси Х4 для того, чтобы занять одно из положений захвата и положение применения, находящееся в 180° от положения захвата. В положение захвата захват 14 приспособлен для того, чтобы захватывать доильный стакан 3 из магазина доильных стаканов 4 в его перевернутом положении. В положении применения захват 4 приспособлен для того, чтобы удерживать доильный стакан 3 в положении с отверстием доильного стакана 3, повернутым вверх так, что доильный стакан 3 в положении применения захвата 14 может быть приложен к соску животного. Доильный робот 10 содержит элемент привода 18, предназначенный для поворота захвата 14 в положение захвата или в положение применения. Подходящие ограничительные элементы захвата (не описаны) предназначены для определения положения захвата и положения применения захвата 14 и для предотвращения выхода захвата 14 за пределы этих положений.
Захват 14 содержит захватывающий элемент 19, в котором должны удерживаться доильный стакан 3 или моющий стакан 7.
Захват определяет, таким образом, положение доильного стакана в захватывающем элементе 19. Захватывающий элемент 19 содержит в описанном варианте реализации электромагнит 20, предназначенный для захвата и удерживания доильного стакана 3 и моющего стакана 8 соответственно. Захватывающий элемент 19 может поворачиваться вокруг пятой оси х5. Пятая ось х5 направлена перпендикулярно продольной оси х4. Центральная точка р может поворачиваться на пятой оси Х5 от первого положения захватывающего элемента до второго положения захватывающего элемента. Целью возможности вращения захватывающего элемента 19 является предотвращение пересечения захватывающего элемента 19 с датчиком 16, т.е. удержание захватывающего элемента 19 вне поля зрения датчика 16. Предпочтительно захватывающий элемент 19 смещается в первое положение захватывающего элемента с помощью пружинного элемента (не описан) и может перемещаться во второе положение захватывающего элемента с помощью привода захвата (не описан). Подходящие ограничительные элементы захватывающего элемента (не описаны) применяются для обозначения первого положения захватывающего элемента и второго положения захватывающего элемента и для предотвращения выхода захватывающего элемента 19 при повороте за пределы этих положений.
Доильный робот 10 устроен так, что каждое положение захвата 14 в рабочем пространстве W соответствует одному сочетанию первого угла, второго угла и третьего угла. Доильный робот 10 содержит ограничительные средства, в которых способность к повороту первого звена L1, второго звена L2 и третьего звена L3 ограничивается с помощью первого ограничительного средства, второго ограничительного средства и третьего ограничительного средства соответственно. За счет применения этих первого, второго и третьего ограничительных средств захват 14 может удерживаться внутри рабочего пространства W во время работы доильного робота 10. Ограничительные средства предпочтительно расположены так, что доильный робот 10 не может допустить расположения захвата 14 вне рабочего пространства W также и тогда, когда доильный робот не работает. Ограничительное средство может быть реализовано различными путями.
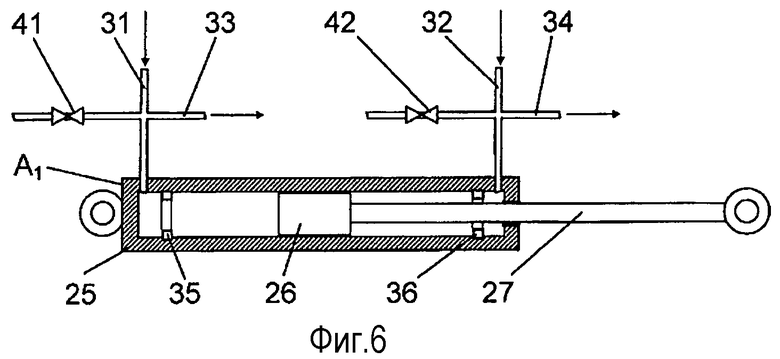
На фиг.6 показано изображение в разрезе исполнительного механизма А1 первого соединения, в описанном варианте исполнительные механизмы соединений А1, А2, А3 содержат соответствующий гидравлический исполнительный механизм, который приводится в действие посредством рабочей жидкости. Каждый из исполнительных механизмов соединений А1, А2, А3 содержит цилиндр 25, поршень 26, который может двигаться в цилиндре 25, и поршневой шток 27. Рабочая жидкость может подводиться и отводиться различными путями. В описанном варианте реализации рабочую жидкость подают через первый вход 31 или второй вход 32 и выпускают через первый выход 33 или второй выход 34 для того, чтобы поршень двигался в любом направлении.
В варианте реализации, показанном на фиг.6, первое ограничительное средство содержит два механических ограничительных элемента 35 и 36, определяющих переднее конечное положение и заднее конечное положение соответственно поршня 26 и поршневого штока 27 в цилиндре 25. Как можно видеть, эти ограничительные элементы 35, 36 помещаются в цилиндре 25, но следует понимать, что они могут быть помещены в любом подходящем положении на исполнительном механизме А1 первого соединения или рядом с ним. Посредством таких ограничительных элементов 35, 36 очерчиваются конечные положения первого углового сектора α1. Следует отметить, что и исполнительный механизм А2 второго соединения, и исполнительный механизм А3 третьего соединения могут содержать такие ограничительные элементы 35, 36, ограничивающие второй угловой сектор α2 и третий угловой сектор α3 соответственно.
Ограничительные элементы 35, 36 могут также быть образованы цилиндром 25, который приспособлен для того, чтобы иметь определенную длину хода. Ограничительные элементы образуются также концами цилиндра 25.
В качестве альтернативы или дополнения первое, второе и третье ограничительные средства могут содержать программное обеспечение, включенное в алгоритм управления, который содержится блоком управления 15.
Алгоритм управления блока управления 15 вычисляет первый, второй и третий углы звеньев L1, L2, L3 для определенного расположения центральной точки р. Это положение определяется положением, воспринятым датчиком 16, и поправочным значением, определяемым расстоянием и углом от центральной точки до положения доильного стакана в захвате 14. Вращение захвата 14 вокруг продольной центральной оси х4 и вращение захватывающего элемента 19 вокруг пятой оси х5 не включаются в алгоритм управления для перемещения центральной точки до указанного определенного положения. Эти два последних движения могут быть добавлены в определенных ситуациях для поворота захвата с целью захвата доильного стакана из магазина доильных стаканов 4 и для поворота захватывающего элемента 19 так, чтобы он не пересекался с датчиком 16.
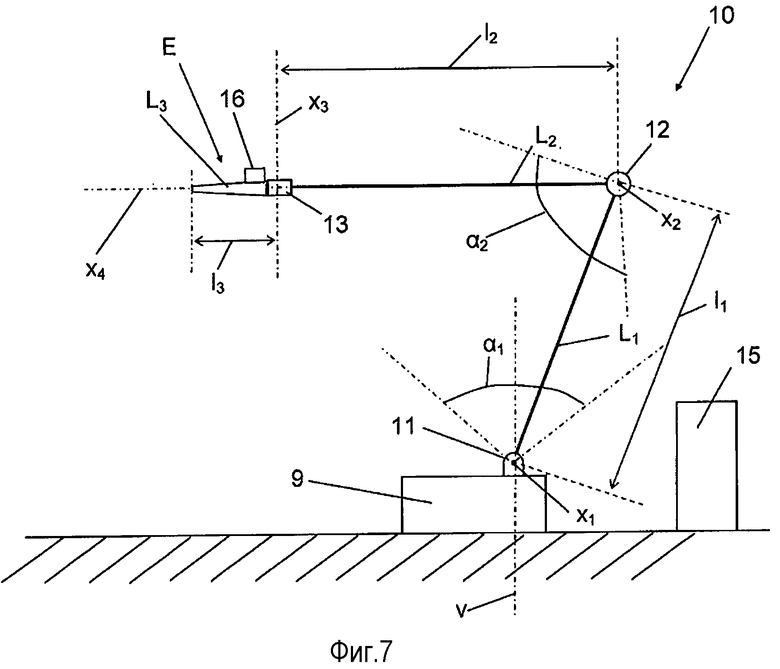
Первое звено L1 имеет первую активную длину l1, которая определяется расстоянием между первой осью х1 и второй осью х2, наблюдаемой в направлении первой оси х1. Второе звено L2 имеет вторую активную длину l2, которая определяется расстоянием между второй осью х2 и третьей осью х3. Третье звено L3 имеет третью активную длину l3, которая определяется расстоянием между второй осью х2 и центральной точкой р захвата 14. Вторая активная длина l2 и третья активная длина l3 относительно велики по сравнению с первой активной длиной l1. В частности, вторая активная длина l2 и третья активная длина l3 могут по меньшей мере в два раза превышать первую активную длину l1. Вторая активная длина l2 и третья активная длина l3 могут быть приблизительно равными.
Исполнительный механизма А1 первого соединения, исполнительный механизм А2 второго соединения и исполнительный механизм А3 третьего соединения содержат соответственно первое, второе и третье согласующие средства, приспособленные для того, чтобы допустить движение соответствующего звена L1, L2 и L3 в случае, когда внешнее усилие, которое превышает заданное значение, приложено к доильному роботу. Согласующие средства предназначены для согласования всех исполнительных механизмов А1, А2 и А3 и предпочтительно также в отношении элемента привода 18 и привода захвата.
На фиг.6 показан один возможный вариант реализации согласующего средства для исполнительного механизма А1 первого соединения. Это согласующее средство содержит первый перепускной клапан 41, приспособленный для того, чтобы открываться для рабочей жидкости, когда внешнее усилие, воздействующее на доильный робот в одном направлении, превышает заданное значение, а второй перепускной клапан 42 приспособлен для того, чтобы открываться для рабочей жидкости, когда заданное значение превышает внешнее усилие, воздействующее на доильный робот в противоположном направлении. Исполнительный механизм А2 второго соединения и исполнительный механизм А3 третьего соединения могут содержать такие согласующие средства, как приведенные в качестве примера в отношении исполнительного механизма А1 первого соединения.
Другой возможный вариант реализации доильного робота может включать в себя дополнительную возможность продвижения в поперечном направлении относительно места доения 2. Такое дополнительное продвижение может быть реализовано как движение базового элемента 9 по рельсу, помещенному на грунт, или как вращение базового элемента 9 вокруг оси, находящейся на значительном расстоянии от первой оси х1. Дополнительное продвижение не включается также в алгоритм управления для продвижения центральной точки в указанное определенное положение, но делается для установки доильного робота 10 в правильное положение относительно места доения 2. Стоит также отметить, что это дополнительное продвижение может быть выполнено с помощью дополнительного звена, прикрепленного к третьему звену L3 и несущего на себе захват 14.
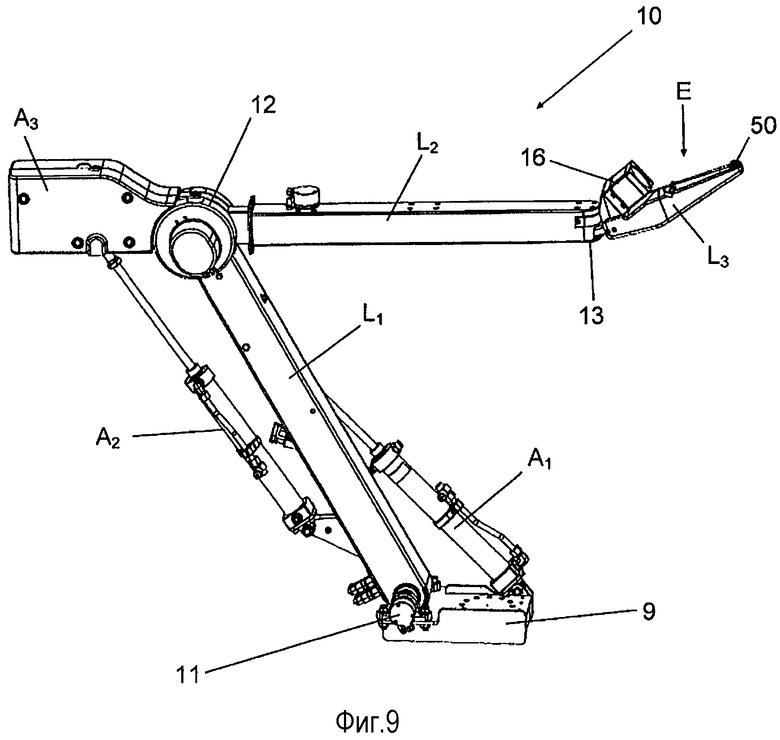
На фиг.7-10 показан второй вариант реализации доильного робота 10, а именно доильный робот 10 по второму варианту реализации является трехзвенным роботом, имеющим три оси и содержащим три звена: первое звено L1, второе звено L2 и третье звено L3. Доильный робот 10 по второму варианту реализации отличается от робота по первому варианту реализации тем, что рабочий орган Е составляется или образован третьим звеном L3.
Как показано на фиг.7 и 8, первое звено L1, таким образом, присоединяется к базовому элементу 9 и может поворачиваться вокруг первой оси х1 до первого угла в пределах первого углового сектора α1 через первое соединение 11 посредством исполнительного механизма А1 первого соединения, показанного на фиг.9 и 10. Во втором варианте реализации первая ось х1 идет горизонтально или по существу горизонтально.
Второе звено L2 присоединено к первому звену L1 и может поворачиваться вокруг второй оси х2 до второго угла в пределах второго углового сектора α2 через второе соединение 12 посредством исполнительного механизма А2 второго соединения, показанного на фиг.9 и 10. Во втором варианте реализации вторая ось х2 проходит горизонтально или по существу горизонтально.
Третье звено L3 присоединено ко второму звену L2 и может поворачиваться вокруг третьей оси х3 до третьего угла в пределах третьего углового сектора α3 через третье соединение 13 посредством исполнительного механизма А3 третьего соединения, показанного на фиг.9 и 10. Во втором варианте реализации третья ось х3 проходит вертикально или по существу вертикально.
Рабочее пространство W сходится во втором варианте реализации на конус в направлении линии v, которая может быть вертикальной и проходить через первое соединение 11. Линия v может также быть, по меньшей мере, слегка наклонена относительно вертикальной линии. Кроме того, согласно второму варианту реализации рабочее пространство W может иметь треугольное продолжение при наблюдении в направлении указанной линии через первое соединение 11.
Во втором варианте реализации рабочий орган Е выполнен в форме сопла или содержит сопло 50, см. фиг.9 и 10, для подачи текучей среды на объект, см. фиг.9 и 10. Сопло 50 служит для подачи очищающей текучей среды на сосок перед доением или может работать как распылительное сопло для разбрызгивания после обработки жидкости на сосок, в то время как с соска снимут доильный стакан после доения. Следует отметить, что доильный робот по первому варианту реализации также может быть снабжен рабочим органом Е, имеющим форму или несущим на себе сопло 50. Кроме того, согласно изобретению доильный робот 10 согласно второму варианту реализации может быть снабжен рабочим органом Е, имеющим форму или содержащим захват 14 для присоединения доильных стаканов.
Центральная точка р, см. фиг.8, может помещаться на третьем звене L3, на сопле 50 или рядом с ним, как показано на фиг.9 и 10.
Базовый элемент 9 может быть установлен на грунте, как показано на фиг.7 и 8, или, как показано на фиг.10, может быть установлен на несущем устройстве С. Несущее устройство С содержит фундамент 61, который может быть помещен или смонтирован на грунте, и первое несущее устройство 62, помещенное на фундаменте 61. Рычаг 63 соединяется с первым несущим устройством 62 и может поворачиваться относительно фундамента 61 вокруг оси y1, параллельной оси платформы поворотной доильной платформы 1.
Опорная платформа 65 соединяется с рычагом 63 и приспособлена для несения на себе доильного робота 10, который приспособлен для присоединения доильных стаканов доильного аппарата к животному, находящемуся в одном из мест доения 2 на поворотной доильной платформы 1, или для очистки или обрызгивания после обработки жидкостью сосков животного.
Несущее устройство С может также содержать второе несущее устройство 67, соединенное с рычагом 63 и позволяющее опорной платформе 65 поворачиваться относительно рычага 63 вокруг оси y2. Ось y2 проходит параллельно или почти параллельно вертикальной оси y1 и оси платформы или поворотной доильной платформы. Второе несущее устройство 67 имеет наружный конец рычага 63 и поддерживает опорную платформу 65 с возможностью вращения.
Рычаг 63 содержит первый рычажный элемент 63а, соединенный с первым несущим устройством 62, и второй рычажный элемент 63b, несущий второе несущее устройство 67. Первый рычажный элемент 63а и второй рычажный элемент 63b соединяются между собой третьим несущим элементом 68, позволяющим второму рычажному элементу 63b поворачиваться относительно первого рычажного элемента 63а вокруг оси y3. Ось y3 проходит через третье несущее устройство 68 и параллельно или по существу параллельно оси y1, оси y2 и оси платформы поворотной доильной платформы.
Несущее устройство С содержит также приводное приспособление, предназначенное для перемещения опорной платформы 65 и содержащее первый приводной элемент, соединенный с фундаментом 61 и рычагом 63, и приспособленное для вращения рычага 63 вокруг оси y1. Приводное приспособление содержит также второй приводной элемент, соединенный с рычагом 63 и опорной платформой 65 вокруг оси y2. Кроме того, приводное приспособление содержит приводной рычажный элемент 63b и предназначено для вращения второго рычажного элемента 63b вокруг оси y3.
С помощью управляющего средства, возможно включенного в блок управления 15, несущее устройство С, поддерживающее доильный робот 10, может управляться так, что доильный робот 10 следует за вращением поворотной доильной платформы 1, так что доильный робот 10 находится в фиксированном положении относительно одного из мест доения 2. Таким образом, существует возможность доильному роботу 10 оставаться в стационарном положении относительно места доения 2 на поворотной доильной платформе 1.
Настоящее изобретение не ограничивается описанными вариантами реализации, но может варьироваться и модифицироваться в пределах объема следующей формулы изобретения.
Хотя исполнительные механизмы соединений А1, А2 и А3, также как приводные элементы несущего устройства С, описаны как гидравлические исполнительные механизмы, следует отметить, что один или все они могут содержать или представлять собой пневматический исполнительный механизм или электрический исполнительный механизм.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО, ДОИЛЬНЫЙ РОБОТ И ДОИЛЬНОЕ ОБОРУДОВАНИЕ | 2011 |
|
RU2567893C2 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587563C9 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587561C2 |
| ВРАЩАЮЩИЙСЯ ЗАЛ ДЛЯ ДОЕНИЯ ЖИВОТНЫХ | 2009 |
|
RU2515035C2 |
| ДОИЛЬНЫЙ ЗАЛ | 2014 |
|
RU2656547C2 |
| ДОИЛЬНЫЙ ЗАЛ И СПОСОБ ЕГО РАБОТЫ | 2010 |
|
RU2524083C2 |
| ДОИЛЬНАЯ УСТАНОВКА С ВНУТРЕННИМ РОБОТИЗИРОВАННЫМ УСТРОЙСТВОМ | 2013 |
|
RU2578613C1 |
| ДОИЛЬНЫЙ АППАРАТ И ДОИЛЬНАЯ УСТАНОВКА, ИМЕЮЩАЯ ДАННЫЙ ДОИЛЬНЫЙ АППАРАТ, И СПОСОБ РАЗМЕЩЕНИЯ ДОИЛЬНОГО АППАРАТА | 2012 |
|
RU2555910C2 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ГИБКОГО ТРУБЧАТОГО ЭЛЕМЕНТА, СОЕДИНЕННОГО С ЧАШЕОБРАЗНЫМ ЭЛЕМЕНТОМ | 2011 |
|
RU2549109C2 |
| ДОИЛЬНОЕ УСТРОЙСТВО | 2007 |
|
RU2447652C2 |
Группа изобретений относится к области животноводства. Технический результат - повышение безопасности процесса доения. Система доения содержит доильный робот (10). Робот содержит первое звено (L1), второе звено (L2), третье звено (L3), рабочий орган (Е), датчик (16) и блок управления (15). Первое звено может поворачиваться до первого угла в пределах первого углового сектора (α1) через первое соединение (11). Второе звено может поворачиваться до второго угла в пределах второго углового сектора (α2) через второе соединение (12). Третье звено может поворачиваться до третьего угла в пределах третьего углового сектора (α3) через третье соединение (13). Звенья (L1, L2, L3) могут поворачиваться так, что рабочий орган (Е) может двигаться внутри трехмерного рабочего пространства (W) доильного робота (10). Каждое положение рабочего органа (Е) в пределах рабочего пространства (W) соответствует отдельному сочетанию первого, второго и третьего углов. 2 н. и 14 з.п. ф-лы, 10 ил.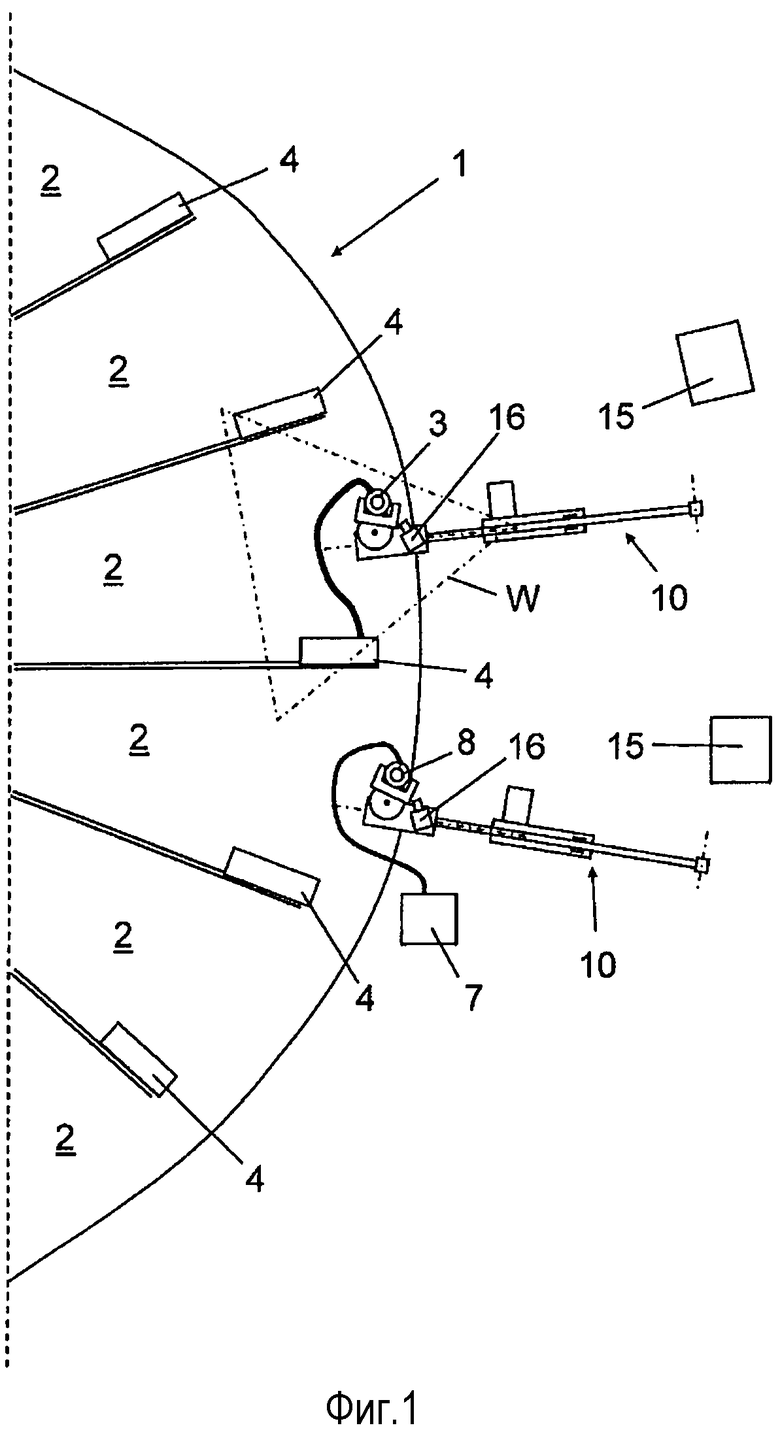
1. Доильный робот (10), содержащий
первое звено (L1), выполненное с возможностью поворота вокруг первой оси (х1) через первое соединение (11) посредством исполнительного механизма (А1) первого соединения,
второе звено (L2), присоединенное к первому звену (L1) и выполненное с возможностью поворота вокруг второй оси (х2) через второе соединение (12) посредством исполнительного механизма (А2) второго соединения,
третье звено (L3), присоединенное ко второму звену (L2) и выполненное с возможностью поворота вокруг третьей оси (х3) через третье соединение (13) посредством исполнительного механизма (А3) второго соединения,
рабочий орган (Е),
датчик (16), выполненный с возможностью определения положения животного, и
блок управления (15), выполненный с возможностью управления исполнительными механизмами первого, второго и третьего соединений для перемещения рабочего органа (Е) в положение, определяемое датчиком (16),
причем первое, второе и третье звенья (L1, L2, L3) выполнены с возможностью поворота для перемещения рабочего органа (Е) внутри трехмерного рабочего пространства (W) доильного робота (10), отличающийся тем, что первое звено (L1) выполнено с возможностью поворота до первого угла в пределах первого углового сектора (α1), второе звено (L2) выполнено с возможностью поворота до второго угла в пределах второго углового сектора (α2), третье звено (L3) выполнено с возможностью поворота до третьего угла в пределах третьего углового сектора (α3), при этом каждое положение рабочего органа (Е) в пределах рабочего пространства (W) соответствует отдельному сочетанию первого, второго и третьего углов поворота первого, второго и третьего звеньев, а рабочий орган (Е) содержит центральную точку (p), которая определяет положение рабочего органа (Е) в программном обеспечении блока управления (15).
2. Доильный робот по п. 1, отличающийся тем, что первое звено (L1), второе звено (L2) и третье звено (L3) выполнены с ограничением вращения с помощью первого, второго и третьего ограничительных средств соответственно для удерживания рабочего органа (Е) в рабочем пространстве (W).
3. Доильный робот по п. 2, отличающийся тем, что первое, второе и третье ограничительные средства выполнены в виде механических ограничительных средств (35, 38).
4. Доильный робот по п. 2, отличающийся тем, что блок управления (15) содержит программное обеспечение для ограничения вращения звеньев.
5. Доильный робот по п. 1, отличающийся тем, что рабочее пространство (W) выполнено сходящимся на конус по направлению к линии, которая совпадает с вертикальной линией v, проходящей через первое соединение или вместе с первой осью (х1).
6. Доильный робот по п. 1, отличающийся тем, что программное обеспечение блока управления (15) предназначено для расчета первого, второго и третьего углов звеньев (L1, L2, L3) для определенного положения центральной точки (p) рабочего органа (Е).
7. Доильный робот по п. 6, отличающийся тем, что третье звено (L3) выполнено с продольной центральной осью (х4), при этом центральная точка (p) рабочего органа размещена на продольной центральной оси (х4).
8. Доильный робот по п. 1, отличающийся тем, что рабочий орган (Е) выполнен в виде захвата (14), присоединенного к третьему звену (L3), которое имеет продольную центральную ось (х4), при этом захват (14) выполнен с возможностью поворота на 180° вокруг продольной центральной оси (х4).
9. Доильный робот по п. 8, отличающийся тем, что захват (14) выполнен с возможностью поворота вокруг продольной центральной оси (х4) для того, чтобы занять положение захвата или положение применения, находящееся на угловом расстоянии 180° от положения захвата.
10. Доильный робот по п. 8, отличающийся тем, что захват (14) содержит захватывающий элемент (19), который выполнен с возможностью вращения вокруг пятой оси (х5), проходящей перпендикулярно продольной центральной оси (х4) от первого положения захватывающего элемента до второго положения захватывающего элемента.
11. Доильный робот по п. 1, отличающийся тем, что первое звено (L1) содержит первую активную длину (l1), второе звено (L2) содержит вторую активную длину (l2) и третье звено (L3) содержит третью активную длину (l3), причем вторая и третья активные длины (l2, l3) по длине второго и третьего звеньев по меньшей мере в два раза превышают длину первого звена или длины первого и второго звеньев по меньшей мере в два раза превышают длину третьего звена.
12. Доильный робот по п. 1, отличающийся тем, что исполнительный механизм (А1) первого соединения, исполнительный механизм (А2) второго соединения и исполнительный механизм (А3) третьего соединения содержат первое, второе и третье согласующие средства для перемещения соответствующего звена в ответ на приложенное извне усилие в случае, когда внешнее усилие превышает заданное значение.
13. Доильный робот по п. 12, отличающийся тем, что исполнительный механизм (А1) первого соединения, исполнительный механизм (А2) второго соединения и исполнительный механизм (А3) третьего соединения содержат соответствующий гидравлический исполнительный механизм, работающий с использованием рабочей жидкости, при этом согласующее средство содержит по меньшей мере один перепускной клапан (41, 43), приспособленный для того, чтобы открываться для рабочей жидкости в случае, когда внешнее усилие превышает заданное значение.
14. Система доения, содержащая несколько мест доения (2), каждое из которых приспособлено для размещения животного, предназначенного для доения, и каждое содержит магазин доильных стаканов (4), содержащий комплект доильных стаканов (3), и по меньшей мере один доильный робот (10) согласно любому из предшествующих пунктов, причем указанный по меньшей мере один доильный робот (10) помещается рядом с доильным помещением.
15. Система доения по п. 14, в которой доильное помещение снабжено поворотной доильной платформой.
16. Система доения по п. 15, которая снабжена по меньшей мере одним несущим устройством (С), расположенным рядом с поворотной доильной платформой (1) для перемещения доильного робота (10), и управляющим средством для управления несущим устройством (С) для поддержки доильного робота (10) вслед за вращением поворотной доильной платформы (1) так, чтобы доильный робот (10) находился в фиксированном положении относительно одного из мест доения (2).
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| EP 900522 F1, 10.03.1999; | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| РЕГУЛИРУЕМЫЙ ИСТОЧНИК ВАКУУМА | 2005 |
|
RU2360405C2 |

