ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ И ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Представленное изобретение в целом относится к автоматическому доению посредством доильного робота, имеющего захватное устройство или рабочий орган, для захвата и удерживания доильных стаканов в процессе прикрепления доильных стаканов к соскам животного, подлежащего доению. Более точно, представленное изобретение относится к захватному устройству согласно преамбуле пункта 1 формулы изобретения. Изобретение также относится к доильному роботу с захватным устройством и к доильному оборудованию, содержащему доильный зал, содержащий множество доильных мест, каждое из которых выполнено с возможностью размещения животного, подлежащего доению, и каждое связано с накопителем доильных стаканов, удерживающих комплект доильных стаканов, и по меньшей мере один доильный робот с захватным устройством.
WO 00/04766 раскрывает доильный робот, содержащий основание, соединительный механизм, прикрепленный к основанию и способный вращаться вокруг оси основания с помощью сочленения основания, и захватное устройство, имеющее проксимальный конец и дистальный конец и прикрепленное к соединительному механизму на проксимальном конце. Захватное устройство имеет плоскость протяжения и продольную центральную ось, простирающуюся в плоскости протяжения через проксимальный конец и дистальный конец. Продольная центральная ось делит захватное устройство на основную сторону и дополнительную сторону. Захватное устройство имеет четыре отдельных захватывающих углубления, каждое из которых выполнено с возможностью захвата соответствующего доильного стакана.
WO 2010/014002 относится к различным устройствам для автоматического прикрепления доильных стаканов к соскам животного. Раскрыты различные захватные устройства, такие как захватные устройства для захвата и удерживания двух доильных стаканов и захватные устройства для захвата и удерживания четырех доильных стаканов в продольной конфигурации вдоль продольной центральной оси захватного устройства или в параллельной трапециевидной конфигурации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель представленного изобретения состоит в том, чтобы предоставить усовершенствованное захватное устройство для доильного робота. Дополнительной целью представленного изобретения является захватное устройство, обеспечивающее одновременный захват всех доильных стаканов из накопителя доильных стаканов. Еще одной дополнительной целью представленного изобретения является захватное устройство, имеющее относительно маленькие размеры.
Данная цель достигается с помощью доильного робота, определенного в начале, который отличается тем, что захватывающие углубления расположены асимметрично относительно продольной центральной оси таким образом, чтобы по меньшей мере три захватывающих углубления были расположены главным образом на основной стороне.
Посредством подобного расположения множества захватывающих углублений на захватном устройстве доильного робота облегчается одновременный захват доильных стаканов из накопителя доильных стаканов, поскольку захватывающие углубления могут быть предоставлены вдоль линии, имеющей прямое или приблизительно прямое протяжение, например немного искривленное протяжение. В соответствии с изобретением захватное устройство согласно первому аспекту может быть выполнено с возможностью одновременного, или по существу одновременного, захвата двух доильных стаканов и, таким образом, возможно, но необязательно, иметь только два захватывающих углубления. Согласно второму аспекту захватное устройство может быть выполнено с возможностью захвата одновременно, или по существу одновременно, трех доильных стаканов и, таким образом, возможно, но необязательно, иметь только три захватывающих углубления. Согласно третьему аспекту захватное устройство может быть выполнено с возможностью захвата одновременно, или по существу одновременно, четырех доильных стаканов и, таким образом, возможно, но необязательно, иметь только четыре захватывающих углубления. Положение доильных стаканов в накопителях доильных стаканов, как правило, соответствует прямой, или по существу прямой, линии таким образом, чтобы доильные стаканы легко захватывались по существу с помощью одного движения посредством захватного устройства доильного робота согласно изобретению. В дополнение, асимметричное расположение доильных стаканов обеспечивает возможность выполнения захватного устройства с доильными стаканами относительно тонким, обеспечивая установку доильных стаканов сзади животного между задними ногами животного.
Согласно варианту осуществления изобретения захватывающие углубления расположены с последовательно увеличивающимся расстоянием от проксимального конца. Преимущественно, первое захватывающее углубление из захватывающих углублений расположено на дистальном конце. Тогда первое захватывающее углубление может подходить для захвата доильного стакана, который должен быть прикреплен первым, предпочтительно к одному из двух передних сосков животного.
Согласно дополнительному варианту осуществления изобретения захватное устройство имеет четыре отдельных захватывающих углубления, при этом захватывающие углубления расположены асимметрично относительно продольной центральной оси таким образом, чтобы по меньшей мере три захватывающих углубления были расположены главным образом на основной стороне.
Согласно дополнительному варианту осуществления изобретения четвертое захватывающее углубление из захватывающих углублений расположено наиболее близко к проксимальному концу, при этом второе захватывающее углубление и третье захватывающее углубление из захватывающих углублений расположены между первым захватывающим углублением и четвертым захватывающим углублением.
Согласно дополнительному варианту осуществления изобретения каждое захватывающее углубление имеет центральную линию, которая имеет проекцию в плоскости протяжения и вдоль которой захватывающее углубление сконфигурировано приближаться и захватывать доильный стакан, при этом проекции центральных линий первого захватывающего углубления и четвертого захватывающего углубления в плоскости протяжения образуют диапазон углов в плоскости протяжения, и при этом диапазон углов равен или меньше чем 90°, предпочтительно, равен или меньше чем 80°, более предпочтительно, равен или меньше чем 70° или наиболее предпочтительно, равен или меньше чем 60°. За счет расположения захватывающих углублений таким образом, чтобы их центральные линии находились внутри ограниченного диапазона углов, облегчается или дополнительно облегчается одновременный захват всех доильных стаканов. Преимущественно, каждая из центральных линий по меньшей мере второго, третьего и четвертого захватывающих углублений может затем тянутся наружу от соответствующих захватывающих углублений и отклоняться от продольной центральной оси на основной стороне.
Согласно дополнительному варианту осуществления изобретения первое захватывающее углубление по меньшей мере частично расположено на дополнительной стороне. Преимущественно, захватное устройство может иметь основную разграничительную линию на основной стороне и дополнительную разграничительную линию на дополнительной стороне, при этом первое захватывающее углубление расположено в непосредственной близости от дополнительной разграничительной линии. Тогда доильный стакан, захватываемый первым захватывающим углублением, может образовывать внешнюю границу на дополнительной стороне захватного устройства.
Согласно дополнительному варианту осуществления изобретения захватное устройство имеет вытянутую форму с длиной вдоль продольной центральной оси, которая является значительно более длинной, чем наибольшая ширина вдоль направления, перпендикулярного продольной центральной оси. Подобная форма самого захватного устройства вносит дополнительный вклад в относительно тонкую ширину захватного устройства с захваченными доильными стаканами, так что захватное устройство и доильные стаканы легко можно устанавливать сзади между задними ногами животного.
Согласно дополнительному варианту осуществления изобретения захватное устройство может поворачиваться вокруг продольной центральной оси относительно соединительного механизма посредством сочленения захватного устройства. Подобное вращательное движение захватного устройства является преимуществом, когда накопитель доильных стаканов выполнен с возможностью удерживания доильных стаканов в перевернутом вверх дном положении, тогда как доильный робот может поворачивать доильные стаканы после того, как они были захвачены посредством поворачивания захватного устройства на 180° вокруг продольной центральной оси в вертикальное положение, с отверстиями доильных стаканов, повернутыми вверх, и таким образом готовыми для прикрепления к соответствующему соску животного.
Согласно дополнительному варианту осуществления изобретения захватывающие углубления расположены на одном и том же уровне относительно плоскости протяжения.
Согласно дополнительному варианту осуществления изобретения доильный робот содержит датчик, предоставленный на захватном устройстве между проксимальным концом и захватывающими углублениями. Датчик может представлять собой видеокамеру, лазерный датчик, камеру времени пролета и т.д.
Согласно дополнительному варианту осуществления изобретения датчик имеет ограниченную дальность видимости, параметры которой подбирают таким образом, чтобы захватывать верхнюю часть всех доильных стаканов, захватываемых захватывающими углублениями. Расположение захватывающих углублений и доильных стаканов согласно изобретению облегчает предоставление датчика таким образом, чтобы его дальность видимости могла включать в себя или охватывать все доильные стаканы без необходимости перемещения или поворачивания датчика относительно захватного устройства и/или доильных стаканов.
Цель изобретения достигается также с помощью доильного робота, определенного в начале, при этом доильный робот содержит манипулятор робота и захватное устройство. Доильный робот может также содержать основание и манипулятор робота в виде соединительного механизма, который может быть прикреплен к основанию и способен вращаться вокруг оси основания с помощью сочленения основания.
Цель изобретения достигается также с помощью доильного оборудования, определенного в начале, в котором доильный робот выполнен с возможностью захвата доильных стаканов, одновременного или по существу одновременного удерживания доильных стаканов в накопителе. Подобный захват может быть выполнен посредством одного единственного движения захватного устройства в направлении доильных стаканов, удерживаемых в накопителе доильных стаканов.
Согласно дополнительному варианту осуществления изобретения накопитель доильных стаканов выполнен с возможностью удерживания доильных стаканов в перевернутом вверх дном положении, при этом доильный робот выполнен с возможностью поворачивания доильных стаканов, после того как доильные стаканы были захвачены, посредством поворачивания захватного устройства на 180° вокруг продольной центральной оси.
Согласно дополнительному варианту осуществления изобретения доильный зал содержит роторную платформу с доильными местами, расположенными таким образом, чтобы животные стояли в радиальном направлении относительно вращающейся центральной оси роторной платформы. В подобном доильном зале доильные стаканы предпочтительно устанавливают сзади животного между задними ногами животного.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее представленное изобретение будет объяснено более подробно посредством описания различных вариантов осуществления и со ссылкой на приложенные к нему чертежи.
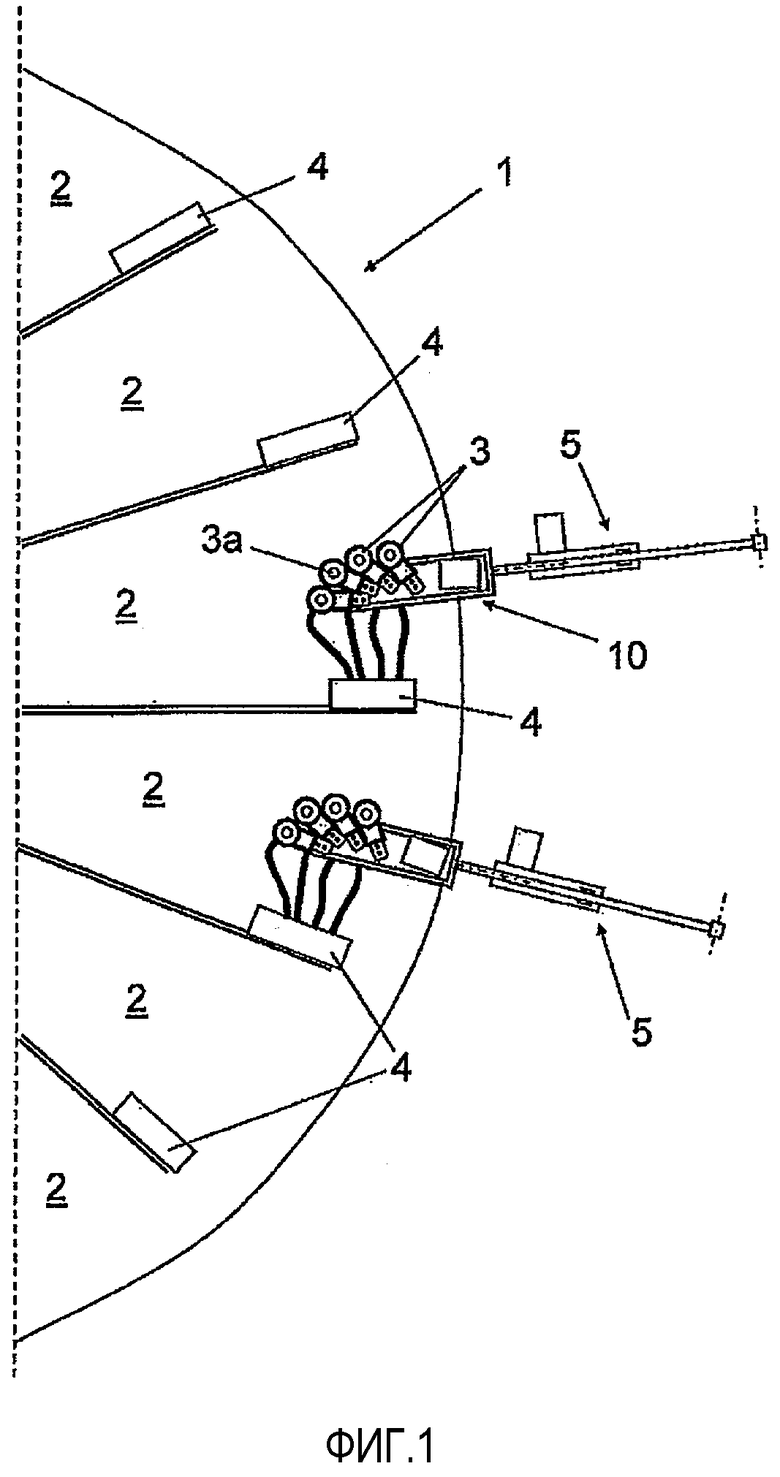
Фиг.1 схематично показывает вид сверху части доильного оборудования.
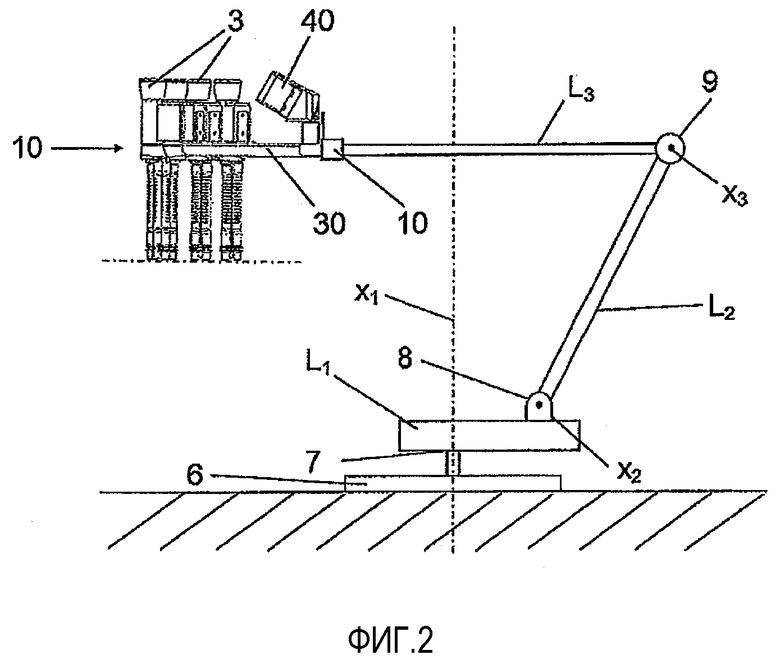
Фиг.2 схематично показывает вид сбоку доильного робота доильного оборудования на Фиг.1.
Фиг.3 схематично показывает вид сверху захватного устройства доильного робота на Фиг.2.
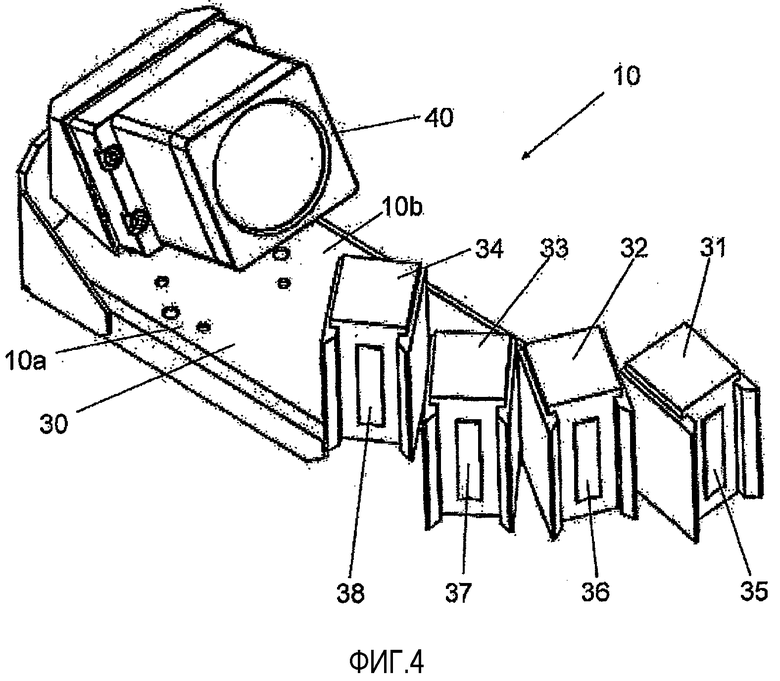
Фиг.4 схематично показывает перспективное изображение захватного устройства на Фиг.3.
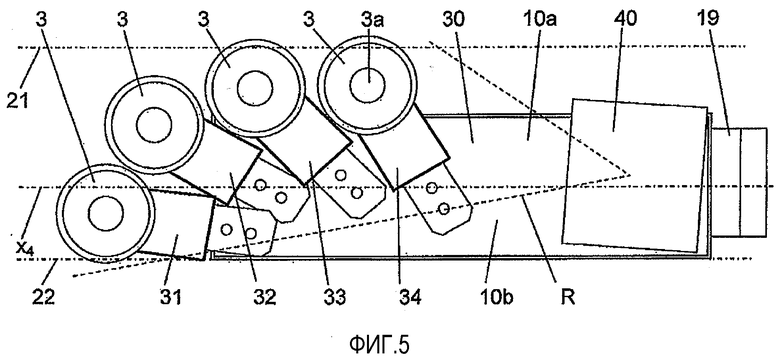
Фиг.5 схематично показывает вид сверху захватного устройства на Фиг.1 и 2 с четырьмя доильными стаканами.
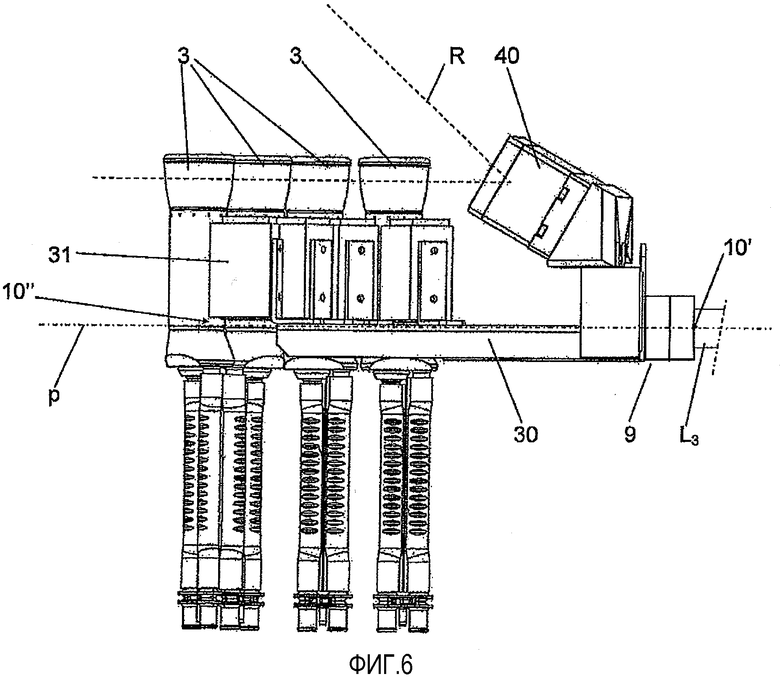
Фиг.6 показывает вид сбоку захватного устройства на Фиг.4.
ПОДРОБНОЕ ОПИСАНИЕ РАЗЛИЧНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Фиг.1 раскрывает доильное оборудование, содержащее доильный зал. В раскрытом варианте осуществления доильный зал содержит или представляет собой, так называемый, Параллельный Роторный Зал, имеющий роторную платформу 1. Необходимо заметить, что доильный зал также может иметь другую конструкцию. Например, доильный зал может представлять собой или содержать стационарный зал, такой как зал типа «елочка» или параллельный зал. Также доильный зал может быть выполнен с одним доильным местом для одного единственного животного.
Раскрытая роторная платформа 1 содержит множество доильных мест 2, расположенных с кольцевой конфигурацией на роторной платформе 1, при этом каждая выполнена с возможностью размещения животного, подлежащего доению. Доильные места 2 расположены таким образом, чтобы животные стояли в радиальном направлении относительно вращающейся центральной оси роторной платформы 1.
Каждое доильное место 2 содержит доильную машину (не раскрыта), содержащую доильный элемент, имеющий некоторое количество доильных стаканов 3. В раскрытом варианте осуществления доильный элемент содержит четыре доильных стакана 3, подлежащих установке сзади животного между задними ногами животного.
Каждое доильное место 2 соединено или содержит накопитель 4 доильных стаканов, выполненный с возможностью удерживания доильных стаканов 3 в течение периода времени между операциями доения. Доильные стаканы 3 удерживаются в накопителе 4 доильных стаканов в перевернутом вверх дном положении, т.е. когда доильный стакан 3 удерживается в накопителе 4 доильных стаканов, отверстие 3a доильного стакана 3 повернуто вниз. Необходимо заметить, что накопитель 4 доильных стаканов также может быть выполнен с возможностью удерживания доильных стаканов в других ориентациях, например с отверстиями 3a, повернутыми вверх.
Раскрытое доильное оборудование также содержит два доильных робота 5 для захвата доильных стаканов 3 из накопителя 4 доильных стаканов и прикрепления их к соскам животного, подлежащего доению. Конечно, доильное оборудование может содержать только один или более чем два доильных робота 5.
Каждый из доильных роботов 5, см. Фиг.2, содержит манипулятор робота. В раскрытом варианте осуществления доильный робот 5 также содержит основание 6, в котором манипулятор робота содержит соединительный механизм, прикрепленный к основанию 6 и способный вращаться вокруг оси х сочленения основания, с помощью сочленения 7 основания. В раскрытом варианте осуществления ось х1 сочленения основания является вертикальной. Основание 6 может быть установлено на полу, на еще одном соединительном звене или на балке, обеспечивающей движение основания 6 относительно роторного зала 1.
Кроме того, необходимо заметить, что соединительный механизм может быть выполнен различными способами. В раскрытом варианте осуществления соединительный механизм, в качестве примера, содержит первое соединительное звено L1, второе соединительное звено L2 и третье соединительное звено L3. Первое соединительное звено L1 прикреплено к основанию 6 и может поворачиваться вокруг оси х1 сочленения основания на первый угол в пределах первого диапазона углов с помощью сочленения 7 основания посредством исполнительного механизма первого сочленения (не показано). Второе соединительное звено L2 прикреплено к первому соединительному звену L1 и способно поворачиваться вокруг второй оси x2 на второй угол в пределах второго диапазона углов с помощью второго сочленения 8 посредством исполнительного механизма второго сочленения (не показано). Третье соединительное звено L3 прикреплено ко второму соединительному звену L2 и способно поворачиваться вокруг третьей оси x3 на третий угол в пределах третьего диапазона углов с помощью третьего сочленения 9 посредством исполнительного механизма третьего сочленения (не показано).
Каждый доильный робот 5 также содержит захватное устройство 10 или рабочий орган. Захватное устройство 10 раскрыто более подробно на Фиг.3-6 и имеет проксимальный конец 10' и дистальный конец 10". Захватное устройство 10 прикреплено к третьему соединительному звену L3 соединительного механизма на проксимальном конце 10'. Захватное устройство 10 имеет плоскость p протяжения и продольную центральную ось x4, простирающуюся в плоскости p протяжения через проксимальный конец 10' и дистальный конец 10".
Захватное устройство 10 может поворачиваться вокруг продольной центральной оси x4 таким образом, чтобы продольная центральная ось x4 образовывала ось вращения захватного устройства 10. В частности, захватное устройство 10 может поворачиваться вокруг продольной центральной оси x4 относительно третьего соединительного звена L3 соединительного механизма посредством сочленения 19 захватного устройства.
Захватное устройство 10 имеет в раскрытых вариантах осуществления четыре отдельных захватывающих углубления 11-14, т.е. первое захватывающее углубление 11, второе захватывающее углубление 12, третье захватывающее углубление 13 и четвертое захватывающее углубление 14. Каждое захватывающее углубление 11-14 выполнено с возможностью захвата и удерживания соответствующего доильного стакана 3. Каждое захватывающее углубление 11-14 имеет соответствующую центральную линию 15-18, см. Фиг.3. Каждая центральная линия 15-18 имеет проекцию в плоскости p протяжения. В раскрытых вариантах осуществления все центральные линии 15-18 захватывающих углублений 11-14 расположены в плоскости p протяжения, но необходимо заметить, что большинство или все центральные линии могут быть наклонены или смещены относительно плоскости p протяжения. Каждое захватывающее углубление 11-14 выполнено с возможностью приближения и захвата доильного стакана 3 вдоль соответствующей центральной линии 15-18. Захватывающие углубления 11-14 расположены на одном и том же уровне относительно плоскости p протяжения.
Также необходимо заметить, что изобретение применимо также для захватных устройств, имеющих два, три, пять или более захватывающих углублений. В случае захватного устройства с двумя захватывающими углублениями они предоставлены асимметрично таким образом, чтобы оба захватывающих углубления были расположены на основной стороне захватного устройства. В случае трех захватывающих углублений две или три захватывающих углубления могут быть расположены на основной стороне.
Продольная центральная ось x4 делит захватное устройство 10 на основную сторону 10a и дополнительную сторону 10b. Захватывающие углубления 11-14 расположены асимметрично относительно продольной центральной оси x4 таким образом, чтобы по меньшей мере три 12-14 захватывающих углубления 11-14 были расположены главным образом на основной стороне 10a.
Захватывающие углубления 11-14 расположены с постепенно увеличивающимся расстоянием от проксимального конца 10'. Первое захватывающее углубление 11 из захватывающих углублений 11-14 расположено на дистальном конце 10". Четвертое захватывающее углубление 14 из захватывающих углублений 11-14 расположено наиболее близко к проксимальному концу 10". Второе захватывающее углубление 12 и третье захватывающее углубление 13 из захватывающих углублений 11-14 расположены между первым захватывающим углублением 11 и четвертым захватывающим углублением 14.
Центральная линия 15 первого захватывающего углубления 11 и центральная линия 18 четвертого захватывающего углубления 14 или проекции центральных линий 15 и 18 в плоскости p протяжения образуют диапазон А углов в плоскости p протяжения, см. Фиг.3. Диапазон А углов равен или меньше чем 90°, предпочтительно, равен или меньше чем 80°, более предпочтительно, равен или меньше чем 70°, а наиболее предпочтительно, равен или меньше чем 60°.
Как можно видеть на Фиг.3 и 5, каждая из центральных линий 15-18 первого, второго, третьего и четвертого захватывающих углублений 11-14 простирается наружу от соответствующих захватывающих углублений 11-14 и отклоняется от продольной центральной оси x4 на основной стороне 10a. Более того, первое захватывающее углубление 11 в раскрытом варианте осуществления расположено на дополнительной стороне 10b. Первое захватывающее углубление 11 по меньшей мере частично может быть расположено на основной стороне 10a. Более того, центральная линия 15 первого захватывающего углубления 11 может отклоняться от продольной центральной оси x4 на дополнительной стороне 10b.
Как также можно видеть на Фиг.5, захватное устройство имеет основную разграничительную линию 21 на основной стороне 10a и дополнительную разграничительную линию 22 на дополнительной стороне 10b, схематично обозначенную на Фиг.3 и 5. Основная разграничительная линия 21 и дополнительная разграничительная линия 22 обе являются параллельными продольной центральной оси x4. Первое захватывающее углубление 11 расположено в непосредственной близости от дополнительной разграничительной линии 22 и в раскрытом варианте осуществления определяет положение дополнительной разграничительной линии 22. Доильный стакан 3, удерживаемый первым захватывающим углублением 11, находится немного снаружи дополнительной разграничительной линии 22.
Захватное устройство 10 имеет вытянутую форму с длиной вдоль продольной центральной оси x4, которая является значительно более длинной, чем наибольшая ширина вдоль направления, перпендикулярного продольной центральной оси x4. В раскрытом варианте осуществления захватное устройство содержит корпус 30 в виде вытянутой пластины, простирающейся параллельно плоскости p протяжения. Каждое захватывающее углубление 11-14 образовано в соответствующем захватывающем элементе 31-34, который установлен на корпусе 30 в соответствующем фиксированном положении на корпусе 30. Каждый захватывающий элемент 31-34 имеет электромагнит 35-38, предоставленный в соответствующем захватывающем углублении 11-14, см. Фиг.4. Посредством подачи напряжения на электромагнит 35-38 может захватываться и удерживаться доильный стакан 3, имеющий оболочку из магнитного материала. Электромагнит 35-38 может быть заменен другим средством, например парой зажимных приспособлений или наконечником пневматического присоса.
Доильный робот 5 также содержит датчик 40, предоставленный на захватном устройстве 10 и установленный на корпусе 30, между проксимальным концом 10' и захватывающими углублениями 11-14. Датчик 40 имеет ограниченную дальность R видимости, параметры которой подбирают таким образом, чтобы захватывать верхнюю часть всех доильных стаканов 3, захватываемых захватывающими углублениями 11-14. Датчик 40 может включать видеокамеру, лазерный датчик, камеру времени пролета и т.д.
Согласно раскрытым вариантам осуществления доильный робот 5 выполнен с возможностью захвата во время работы доильных стаканов 3, как правило, четырех доильных стаканов, удерживания перевернутыми вверх дном в накопителе 4 доильных стаканов за счет поворачивания захватного устройства 10 на 180° с датчиком 40, повернутым вниз, а затем перемещения захватного устройства 10 вдоль по существу прямой траектории в направлении накопителя 4 доильных стаканов таким образом, чтобы четыре захватывающих углубления 11-14 приближались и зацепляли все четыре доильных стакана 3 одновременно, или по существу одновременно. На электромагниты 35-38 подается напряжение, при этом доильные стаканы 11-14 удерживаются в захватном устройстве 10.
Затем доильный робот 5 извлекает захватное устройство 10 и доильные стаканы 3 из накопителя 4 доильных стаканов и поворачивает захватное устройство на 180° таким образом, чтобы доильные стаканы 3 располагались отверстиями 3a, повернутыми вверх. Захватное устройство 10 и доильные стаканы 3 перемещаются вдоль траектории, предпочтительно между задними ногами животного, в направлении вымени и сосков животного. Затем доильные стаканы 3 последовательно прикрепляются к соскам животного.
Возможный порядок прикрепления, например, будет следующим:
1) прикрепление доильного стакана 3, удерживаемого в четвертом захватывающем углублении 14, к заднему правому соску,
2) прикрепление доильного стакана 3, удерживаемого в третьем захватывающем углублении 13, к переднему правому соску,
3) прикрепление доильного стакана 3, удерживаемого во втором захватывающем углублении 12, к переднему левому соску, и
4) прикрепление доильного стакана 3, удерживаемого в первом захватывающем углублении 11 к заднему левому соску.
Конечно, в пределах объема правовых притязаний изобретения возможны другие порядки прикрепления.
Представленное изобретение не ограничено описанными вариантами осуществления, но может быть изменено и модифицировано в пределах объема правовых притязаний формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587561C2 |
| ДОИЛЬНЫЙ ЗАЛ | 2014 |
|
RU2656547C2 |
| ДОИЛЬНЫЙ РОБОТ И СИСТЕМА ДОЕНИЯ | 2011 |
|
RU2566704C2 |
| ДОИЛЬНЫЙ ЗАЛ И СПОСОБ ЕГО РАБОТЫ | 2010 |
|
RU2524083C2 |
| ДОИЛЬНЫЙ АППАРАТ И ДОИЛЬНАЯ УСТАНОВКА, ИМЕЮЩАЯ ДАННЫЙ ДОИЛЬНЫЙ АППАРАТ, И СПОСОБ РАЗМЕЩЕНИЯ ДОИЛЬНОГО АППАРАТА | 2012 |
|
RU2555910C2 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587563C9 |
| ДОИЛЬНОЕ УСТРОЙСТВО | 2007 |
|
RU2447652C2 |
| Вращающаяся доильная платформа | 2011 |
|
RU2683548C2 |
| СОСКОВАЯ РЕЗИНА, ДОИЛЬНЫЙ СТАКАН И ДОИЛЬНЫЙ ЭЛЕМЕНТ | 2000 |
|
RU2260939C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОЙ ДОЙКИ МОЛОЧНОГО СКОТА | 2007 |
|
RU2473211C2 |
Группа изобретений относится к молочному животноводству. Доильное оборудование содержит доильный робот с захватным устройством (10). Робот содержит основание, соединительный механизм, прикрепленный к основанию и способный поворачиваться вокруг оси основания с помощью сочленения основания. Захватное устройство (10) имеет проксимальный конец и дистальный конец и прикреплено к соединительному механизму на проксимальном конце. Захватное устройство имеет плоскость протяжения и продольную центральную ось (x4), простирающуюся в плоскости протяжения через проксимальный конец и дистальный конец. Продольная центральная ось делит захватное устройство на основную сторону (10a) и дополнительную сторону (10b). Захватное устройство имеет множество отдельных захватывающих углублений (11-14), каждое из которых выполнено с возможностью захвата соответствующего доильного стакана. Захватывающие углубления расположены асимметрично относительно продольной центральной оси, по меньшей мере, три захватных углубления расположены главным образом на основной стороне (10а). Изобретение раскрывает также доильный робот, который содержит манипулятор и описанное захватное устройство, и доильное оборудование, включающее такой доильный робот. Изобретение обеспечивает усовершенствование захватного устройства за счет возможного одновременного захвата всех доильных стаканов из накопителя и уменьшения размеров устройства. 3 н. и 14 з.п. ф-лы, 6 ил.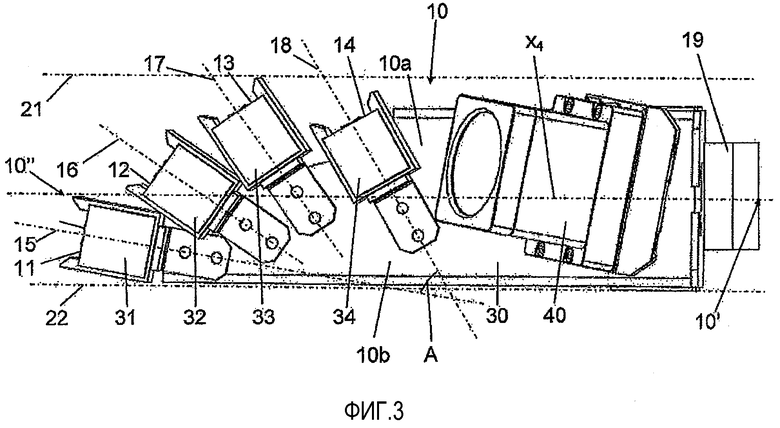
1. Захватное устройство (10), выполненное для доильного робота, при этом захватное устройство (10) имеет проксимальный конец (10′) и дистальный конец (10″) и выполнено с возможностью прикрепления к доильному роботу (5) на проксимальном конце (10′), при этом захватное устройство имеет плоскость (p) протяжения и продольную центральную ось (х4), простирающуюся в плоскости (p) протяжения через проксимальный конец (10′) и дистальный конец (10″),
при этом продольная центральная ось (х4) делит захватное устройство (10) на основную сторону (10а) и дополнительную сторону (10b),
при этом захватное устройство (10) имеет множество отдельных захватывающих углублений (11-14), каждое из которых выполнено с возможностью захвата соответствующего доильного стакана (3), при этом захватывающие углубления (11-14) расположены асимметрично относительно продольной центральной оси (х4),
отличающееся тем, что захватное устройство (10) имеет четыре отдельных захватывающих углубления (11-14), расположенных асимметрично относительно продольной центральной оси (х4) таким образом, что по меньшей мере три захватывающих углубления (11-14) расположены главным образом на основной стороне (10а).
2. Захватное устройство по п. 1, в котором захватывающие углубления (11-14) расположены с последовательно увеличивающимся расстоянием от проксимального конца (10′).
3. Захватное устройство по п. 1, в котором первое захватывающее углубление (11) из захватывающих углублений (11-14) расположено на дистальном конце (10″).
4. Захватное устройство по любому из пп. 1-3, в котором четвертое захватывающее углубление (14) из захватывающих углублений (11-14) расположено наиболее близко к проксимальному концу (10′) и в котором второе захватывающее углубление (12) и третье захватывающее углубление (13) из захватывающих углублений (11-14) расположены между первым захватывающим углублением (11) и четвертым захватывающим углублением (14).
5. Захватное устройство по п. 4, в котором каждое захватывающее углубление (11-14) имеет центральную линию (15-18), которая имеет проекцию в плоскости (p) протяжения и вдоль которой захватывающее углубление (11-14) выполнено с возможностью приближения и захвата доильного стакана (3), и в котором проекции центральных линий (15-18) первого захватывающего углубления (11) и четвертого захватывающего углубления (14) в плоскости (p) протяжения образуют диапазон углов в плоскости протяжения, и при этом диапазон углов равен или меньше чем 90°.
6. Захватное устройство по п. 5, в котором по меньшей мере каждая из центральных линий (16-18) второго, третьего и четвертого захватывающих углублений (12-14) располагается наружу от соответствующих захватывающих углублений (12-14) и отклоняется от продольной центральной оси (х4) на основной стороне (10а).
7. Захватное устройство по п. 3, в котором первое захватывающее углубление (11) по меньшей мере частично расположено на дополнительной стороне (10b).
8. Захватное устройство по п. 7, в котором захватное устройство имеет основную разграничительную линию (31) на основной стороне (10а) и дополнительную разграничительную линию (32) на дополнительной стороне (10b) и при этом первое захватывающее углубление (11) расположено в непосредственной близости от дополнительной разграничительной линии (32).
9. Захватное устройство по любому из пп. 1-3, в котором захватное устройство (10) имеет вытянутую форму с длиной вдоль продольной центральной оси (х4), которая является значительно более длинной, чем наибольшая ширина вдоль направления, перпендикулярного продольной центральной оси (х4).
10. Захватное устройство по любому из пп. 1-3, в котором захватное устройство (10) может поворачиваться вокруг продольной центральной оси (х4) относительно доильного робота (5) посредством сочленения (19) захватного устройства.
11. Захватное устройство по любому из пп. 1-3, в котором захватывающие углубления (11-14) расположены на одном и том же уровне относительно плоскости (p) протяжения.
12. Захватное устройство по любому из пп. 1-3, в котором доильный робот (5) содержит датчик (40), предоставленный на захватном устройстве (10) между проксимальным концом (10′) и захватывающими углублениями (11-14).
13. Захватное устройство по п. 12, в котором датчик (40) имеет ограниченную дальность (R) видимости, параметры которой подбирают таким образом, чтобы охватывать верхнюю часть всех доильных стаканов (3), захватываемых захватывающими углублениями (11-14).
14. Доильный робот (5), содержащий манипулятор робота и захватное устройство (10) по любому из предшествующих пунктов.
15. Доильное оборудование, содержащее доильный зал, содержащий множество доильных мест (2), каждое из которых выполнено с возможностью размещения животного, подлежащего доению, и каждое связано с накопителем (4) доильных стаканов, удерживающим комплект доильных стаканов (3), и по меньшей мере один доильный робот (5) с захватным устройством (10) по любому из пп. 1-13, при этом доильный робот (5) выполнен с возможностью захвата доильных стаканов (3), удерживаемых в накопителе (4) доильных стаканов по существу одновременно.
16. Доильное оборудование по п. 15, в котором накопитель (4) доильных стаканов выполнен с возможностью удерживания доильных стаканов (3) в перевернутом вверх дном положении и в котором доильный робот (5) выполнен с возможностью поворачивания, после того как доильные стаканы (3) были захвачены, доильных стаканов (3) посредством поворачивания захватного устройства (10) на 180° вокруг продольной центральной оси (х4).
17. Доильное оборудование по любому из пп. 15 и 16, в котором доильный зал содержит роторную платформу (1) с доильными местами (2), расположенными таким образом, чтобы животные стояли в радиальном направлении относительно вращающейся центральной оси роторной платформы (1).

