Область техники, к которой относится изобретение
В общем плане изобретение относится к области сельского хозяйства и обработки собранного урожая.
Уровень техники
Для этих целей используются транспортные средства, особенно самоходные сельскохозяйственные уборочные машины, которые служат для сбора урожая и обработки убранной массы. Под самоходными сельскохозяйственными уборочными машинами имеются в виду, как правило, зерноуборочные комбайны, полевые измельчители и все виды копателей, которые используются для скашивания и/или подбора материала урожая. В типовом случае такие машины могут после скашивания и/или подбора известным образом обрабатывать убранную массу. В качестве примера взят зерноуборочный комбайн. В комбайне скошенные колосья материала убранной массы транспортируются внутрь машины, где зерно отделяется от другого биологического убранного материала в процессе обмолота и очистки. Получаемое очищенное зерно подается в зерновой бункер комбайна, а соломенная труха, полова, масса схода, отходы, пыль и другие фракции возвращаются на поле. Однако в процессе обмолота не все зерна полностью высвобождаются из колосьев, так что в комбайне известным образом имеется прямой зерновой тракт и возвратный тракт, то есть механический возвратный тракт, по которому не обмолоченные полностью колосья направляются назад для дополнительного обмолота. Поэтому настройка рабочих аппаратов в процессе обмолота имеет особенное значение. Слишком строгая настройка молотильного устройства приводит к высокому содержанию битого зерна, что нежелательно. При слишком мягкой настройке в убранную массу попадают не полностью обмолоченные зерна, что нарушает дальнейшую обработку зерна. Полова и соломенная труха, которые попали в поток убранной массы при обмолоте, могут быть отделены в сепарирующем устройстве, следующем за ступенью обмолота, однако слишком строгая настройка сепарирующего устройства также приводит к зерновым потерям. Поэтому для сельского хозяйства имеет большое значение, с одной стороны, сбор в зерновом бункере высококачественной убранной массы и, с другой стороны, устранение потерь убранной массы при получении желательного качества. Система норм и другие параметры качества при производстве пищевых и кормовых продуктов предъявляют все более высокие требования к безопасности продуктов. Адекватная безопасность продукта может обеспечиваться только тогда, когда, например, применительно к содержимому зернового бункера выполняется регистрация и определение состава убранной массы в зерновом бункере (сорная примесь, постороннее зерно, битое зерно, щуплое зерно, полова и т.д.).
Соответственно, изобретение относится к устройству для регистрации и определения состава сыпучего материала, в особенности убранной массы, посевного материала или других сыпучих сельскохозяйственных продуктов, которое при загрузке убранной массы в контейнер, предпочтительно при загрузке в зерновой бункер сельскохозяйственных уборочных машин, особенно самоходных уборочных машин, обеспечивает получение квалифицированного заключения о составе убранного материала в процессе его обработки. Это обеспечивает возможность изменения или оптимизации настройки параметров рабочих аппаратов сельскохозяйственной уборочной машины в процессе обработки убранного материала и надежное обеспечение в любой момент оптимального качества убранной массы в результате процесса уборки и обработки и тем самым удовлетворение повышенных требований к качеству.
Только при определении качества убранной массы возможна постоянная оптимизация рабочих аппаратов для обеспечения желаемого качества содержимого зернового бункера. Оптимизация заключается в том, что на основе анализа потока убранной массы может производиться необходимое изменение параметров настройки рабочих аппаратов или настройка молотильного устройства.
В уровне техники из патентного документа ЕР 1763988 А1 известно устройство, которое, выполняет мониторинг содержимого зернового бункера в процессе уборки зерновых и предусматривает изменение параметров настройки молотильных устройств.
В ЕР 1763988 А1 описан зерноуборочный комбайн, оснащенный детектором изображений, который расположен вдоль пути транспортирования убранной массы, в данном случае на выходе зернового элеватора, то есть на переходе к зерновому бункеру. С помощью детектора изображений могут быть получены изображения потока убранной массы, выходящего из зернового элеватора. В качестве детектора изображений служит камера на приборе с зарядовой связью (далее - ПЗС-камера). На основе этих изображений проверяется качество потока убранной массы. Проверка производится на загрязнения в потоке убранной массы, например, на остаточные фракции соломенной трухи, половы, необмолоченных колосьев и т.д., а также на содержание битого зерна. Снятые камерой изображения потока убранной массы могут с помощью устройства управления отображаться на дисплее в кабине водителя, так что оператор или водитель может оказывать воздействие на параметры настройки молотильных устройств, то есть изменять их. Далее, в устройстве управления содержится серия контрольных изображений, с которыми могут сравниваться полученные изображения, чтобы определять возможные отклонения полученных в процессе обмолота изображений от контрольных изображений и делать заключение и качестве по сравнению с контрольными изображениями.
В принципе этот способ определения качества убранной массы оправдал себя. Однако выявился недостаток в том, что на месте фотограмметрии происходит разделение на слои, с одной стороны зерна, битого зерна и не содержащих зерна фракций и с другой стороны слой тонкой пыли. Причина расслоения заключается в воздействии центробежных сил на поток убранной массы. Для перегрузки из зернового элеватора в зерновой бункер поток убранной массы подвергается необходимому ускорению. Ускорение потока убранной массы из зернового элеватора вызывает расслоение состава потока убранной массы. Поскольку одни фракции потока убранной массы легче, а другие тяжелее, происходит разделение потока убранной массы на различные слои, и их восприятие с помощью устройства регистрации изображений не обеспечивает достаточно точного качественного определения фракций убранной массы, так как невозможна одинаковая регистрация всех слоев.
Раскрытие изобретения
Соответственно, задачей изобретения является создание устройства для регистрации, т.е. фотографирования, съемки, и определения состава сыпучего материала, в особенности убранной массы в зерновом бункере сельскохозяйственных уборочных машин указанного вида, позволяющего устранить указанные недостатки известных устройств уровня техники, а также создание технического решения, обеспечивающего улучшенную регистрацию потока убранной массы для определения качества убранного материала.
В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков, изложенных в пункте 1 формулы изобретения. Предпочтительные примеры осуществления и решения по развитию изобретения изложены в зависимых пунктах.
Согласно пункту 1 формулы изобретения устройство регистрации изображений содержит, по меньшей мере, два детектора изображений, которые выполнены с возможностью съемки изображений или серий изображений потока убранной массы через равные промежутки расстояния или непрерывно и которые расположены в направлении окружного периметра на воображаемой окружности предпочтительно с угловым смещением на 180° относительно друг друга, причем один детектор изображений расположен примерно перпендикулярно верхней стороне наружной поверхности потока убранной массы, выходящего из головной части зернового элеватора или из разгрузочной трубы, а другой детектор изображений расположен примерно перпендикулярно нижней стороне наружной поверхности потока убранной массы.
В качестве детекторов изображений могут использоваться две ПЗС-камеры. Они пригодны для того, чтобы при разгрузке потока убранной массы в контейнер генерировать изображения или серии изображений через равные промежутки расстояния или непрерывно. Разгрузка убранной массы производится, как правило, из выпускного устройства сельскохозяйственных уборочных машин. При этом таким выпускным устройством может служить выпуск головной части элеватора зерноуборочного комбайна или выпуск разгрузочной трубы полевого измельчителя. Таким образом, два детектора изображений предусмотрены в положении за рабочими аппаратами, обрабатывающими убранную массу. Согласно системе расположения, по меньшей мере, одного детектора изображений на нижней или на верхней стороне потока убранной массы достигается лучшее освещение и, соответственно, лучшая регистрация изображения потока убранной массы, в результате чего обеспечивается возможность полноценной качественной оценки изображения и эффективного анализа состава потока убранной массы на остаточные фракции. Так например, при небольшой толщине слоя освещение с нижней стороны потока убранной массы, которая может быть также названа задней стороной потока, может улучшать съемку изображения на верхней стороне потока убранной массы. При съемке изображения повышается яркость, что также улучшает распознавание объектов в изображении и тем самым анализ изображения при оценке изображения на определенные признаки.
Как это описано в ЕР 1763988 А1, генерируемые двумя детекторами изображений изображения или серии изображений направляются в блок памяти и с помощью блока выбора производится анализ записанных изображений или серий изображений путем сравнения с заложенными изображениями или сериями изображений. Вследствие эффекта расслаивания состав убранной массы имеет отличия на изображениях или сериях изображений, зарегистрированных верхним и нижним детекторами. Эти отличия регистрируются и определяется состав с помощью описанного выше метода. В заключение в устройстве управления полученные величины анализа соотносятся с параметрами управления - величинами настройки, на которые могут настраиваться или изменяться соответствующие рабочие аппараты. Так, в качестве единичного примера, параметр управления - величина настройки может относиться к молотильному устройству для снижения содержания битого зерна. Другой пример параметра управления - величины настройки может относиться независимо от молотильного устройства к сепарирующему устройству для снижения содержания половы и соломенной трухи и т.д.
Предпочтительно детекторы изображений могут быть расположены один напротив другого. Противоположное расположение детекторов изображений в соответствии с изобретением обеспечивает получение дополнительных преимуществ. Так, расположение детекторов изображений один напротив другого позволяет определять толщину слоя потока убранной массы, проходящего через головную часть элеватора или разгрузочной трубы. При измерении путем обработки изображений можно с помощью соответствующего алгоритма в устройстве управления определять объемный расход потока убранной массы в самоходной сельхозмашине, в особенности в полевом измельчителе. Полученный в результате метода обработки изображений объемный расход может визуально отображаться для водителя на дисплее устройства отображения. Дополнительно полученные величины измерения могут привлекаться для оценки сжимаемости убранной массы в хранилище, при этом регулировка длины отрезков измельчения убранной массы при постоянном расходе потока вызывает изменение объема, что является мерой сжимаемости убранной массы. Величина сжимаемости вычисляется из измеренных величин.
Другое преимущество, достигаемое за счет противоположного расположения детекторов изображений, заключается в возможности определения другой величины измерения. Эта величина измерения относится к светопроницаемости потока убранной массы. Для измерения светопроницаемости потока убранной массы производится освещение потока убранной массы только с одной стороны. Так например, освещение может производиться детектором изображений на верхней стороне, а противолежащий детектор изображений на нижней стороне детектирует улавливаемый свет и таким образом проверяет светопроницаемость потока убранной массы. Другими словами, проходящий между двумя детекторами изображений поток убранной массы освещается одним детектором изображений устройства регистрации изображений, при этом расположенный напротив детектор изображений детектирует прошедший через поток свет. Излучающий свет детектор изображений может быть как верхним, так и нижним детектором изображений. Принимающий свет противолежащий детектор изображений является, соответственно, нижним или верхним детектором. Из полученной величины измерения в устройстве управления вычисляется величина, которая выражает числовое значение содержания пыли. С помощью этого метода измерений, то есть проверки светопроницаемости потока убранной массы, может регистрироваться и определяться содержание пыли в потоке убранной массы. В свою очередь оценка содержания пыли в потоке убранной массы является критерием, например, для настройки рабочего аппарата отсасывания пыли и/или сепарирующего устройства.
На основе того, что устройство регистрации изображений содержит два детектора изображений, возможно еще одно измерение по сравнению с решениями уровня техники. При наличии зернового элеватора для транспортирования потока убранной массы в зерновой бункер целесообразно используется еще одно преимущество оптической системы регистрации изображений. В принципе зерновой элеватор состоит из в основном закрытой шахты, в которой подобно непрерывному лифту по замкнутой траектории движутся так называемые лопасти элеватора. Предпочтительно съемка изображения синхронизирована с разгрузкой лопасти элеватора. В данном случае разгрузкой лопасти называется процесс, когда убранная масса ускоряется центробежными силами в точке поворота лопасти и выбрасывается с лопасти в зерновой бункер. В принципе точка поворота является областью поворота. Область поворота представляет собой переход от подъема лопасти в элеваторе до ее опускания. Точнее говоря, область поворота представляет собой участок пути с поворотом на 180° на радиусе прохода лопастей элеватора. Это означает, что начало съемки изображения производится устройством регистрации изображений только тогда, когда лопасть элеватора достигает положения разгрузки или выброса. Положение разгрузки привлекается для запуска двух детекторов изображений.
Другой запуск устройства регистрации изображений может осуществляться с помощью расположенного в зерновом элеваторе датчика выхода продукта. Датчик выхода продукта может состоять из простой фотоячейки, расположенной в шахте зернового элеватора. Фотоячейка расположена таким образом, что световой луч падает на лопасть элеватора не перпендикулярно. Световой луч проходит горизонтально к лопасти элеватора и перпендикулярно от ее одной боковой кромки к другой. При таком расположении, когда на лопасти элеватора имеется убранная масса и через нее проходит световой луч, производится детектирование убранной массы. Таким образом, датчик надежно устанавливает, имеется ли на лопасти убранная масса или нет. Другими словами, запуск устройства регистрации изображений или съемка изображений устройством регистрации изображений осуществляется только тогда, когда на лопасти иметься определенное количество убранной - массы. Съемка изображений устройством регистрации изображений управляется в зависимости от положения лопастей элеватора и объема убранной массы на лопасти элеватора. В зависимости от установки оператора съемка может производиться через равномерные промежутки расстояния между лопастями элеватора или в зависимости от положения створок лопастей элеватора и/или от объема убранной массы на лопастях элеватора.
Альтернативно в качестве датчика выхода продукта в области разгрузки на головной части элеватора может быть установлен отбойный щиток и предназначенный для него датчик силы тяжести. Отбойный щиток, на котором расположен датчик силы тяжести, должен периодически проверяться на загрязнения, однако из-за своего уязвимого положения в головной части элеватора он труднодоступен. Для получения достоверных результатов измерений должны удаляться загрязнения, которые могут откладываться на поверхности отбойного щитка, обращенной к потоку убранной массы. Во избежание этих недостатков согласно изобретению предложено с помощью устройства регистрации изображений контролировать отбойный щиток с расположенным на нем датчиком силы тяжести и очищать его с помощью дополнительно установленного очистного устройства. Очистка может производиться автоматически или по мере надобности, причем в этом случае степень загрязнения поверхности отбойного щитка доводится до сведения оператора сельскохозяйственной уборочной машины, чтобы он мог инициировать процесс очистки. Предпочтительно один из детекторов изображений, расположенных на выходе зернового элеватора, может быть установлен таким образом, что наружная поверхность отбойного щитка находится в области обзора детектора. При этом можно проверять загрязнение поверхности отбойного щитка с помощью устройства регистрации изображений. Такая проверка может производиться в эксплуатационном режиме при холостом ходе зернового элеватора. Другой способ устранения загрязнений состоит в том, чтобы поддерживать чистое состояние поверхности отбойного щитка с помощью очистного устройства с дистанционным приводом и производить очистку по мере надобности. Этот процесс очистки также может осуществляться автоматически на основе оптического мониторинга. В этом случае обслуживание очистного устройства производится оператором через посредство операторского устройства в кабине водителя, при этом контроль за процессом очистки может осуществляться по дисплею.
Оптимальным образом с помощью детекторов изображений устройства регистрации изображений по изобретению производится также контроль технического состояния лопастей зернового элеватора. Если устанавливается износ или неисправность одной или нескольких лопастей элеватора, требующие замены или восстановления одной или нескольких лопастей, на дисплее операторского устройства появляется визуальное указание для оператора. Кроме того, установленное оптическим образом техническое состояние лопастей элеватора записывается в запоминающей среде операторского устройства. Снимки изображений могут считываться из запоминающей среды персоналом по техническому обслуживанию. Съемка изображений технического состояния лопастей элеватора производится в эксплуатационном режиме зерноуборочного комбайна, предпочтительно во время паузы в рабочем процессе, посредством верхнего детектора изображений устройства регистрации изображений. При холостом ходе зернового элеватора верхний детектор изображений генерирует изображения или серии изображений лопастей элеватора, которые затем для установления износа сравниваются в устройстве управления с выбранными изображениями новых лопастей элеватора. В зависимости от настройки на операторском устройстве изображения или серии изображений лопастей элеватора могут отображаться для оператора на дисплее устройства отображения в реальном времени или после автоматической оценки устройством управления.
В отличие от верхнего детектора изображений нижний детектор изображений при холостом ходе зернового элеватора во время паузы в уборке регистрирует расстояние между стенкой головной части элеватора и лопастями элеватора для определения расстояния между ними. Оценка изображений также осуществляется в устройстве управления и также отображается на дисплее устройства отображения. При отображении может также появляться предупреждение или указание на необходимость технического обслуживания. Если расстояние между стенкой головной части элеватора и лопастью элеватора не достигает предварительно заданной ' величины, или предварительно заданного расстояния, это является признаком слабого натяжения цепи или износа цепи. Цепь является несущим и тяговым элементом для лопастей элеватора и обеспечивает путь транспортирования убранной массы в шахте элеватора.
В предпочтительном решении по развитию изобретения в качестве другого примера осуществления для регистрации и определения состава потока убранной массы используются до четырех детекторов изображений. Все детекторы изображений также находятся на воображаемой окружности с угловым шагом в направлении окружного периметра, предпочтительно с угловым смещением на 90° относительно друг друга. Само собой разумеется, что между детекторами изображений могут быть предусмотрены другие расстояния. Так например, два детектора изображений, расположенные справа и слева от нижнего детектора изображений, могут отстоять от него на угол 60° каждый и на угол 120° от верхнего детектора изображений.. Возможны другие комбинации расстояний между детекторами изображений на основе опытных величин эффекта расслаивания потока убранной массы. При таких схемах расположения обеспечивается возможность съемки изображений потока убранной массы с четырех сторон, то есть сверху, снизу и с двух боковых сторон. Преимущество такой системы с использованием до четырех детекторов изображений обеспечивает оптимальное освещение потока убранной массы со всех сторон. Благодаря этому оптимально определяются обусловленные эффектом расслаивания различные слои потока убранной массы и, прежде всего, может незамедлительно распознаваться изменение в слоях потока убранной массы. Более эффективно может осуществляться оценка изображений и, соответственно, анализ состава потока убранной массы на остаточные фракции. На основе своевременного определения состава потока убранной массы могут оперативно регулироваться параметры настройки рабочих аппаратов и обеспечиваться остающееся постоянным качество убранной массы в зерновом бункере.
В предпочтительном решении по развитию изобретения, по меньшей мере, один детектор изображений устройства регистрации изображений расположен с возможностью перемещения. Каждый детектор изображений находится в части корпуса, из которых, по меньшей мере, одна установлена с возможностью перемещения. Предпочтительно часть корпуса детектора изображений установлена с возможностью смещения по дуге окружности на определенный угол в обоих направлениях. Смещение может производиться от нижнего положения детектора изображений на угол от 0° до 180°, так что при этом в устройстве регистрации изображений требуется только один детектор изображений.
Если в предпочтительном примере осуществления две части корпуса расположены с возможностью перемещения по дуге окружности, возможно смещение частей корпуса, а следовательно, и детекторов изображений по отдельности или одновременно. Здесь требуется смещение частей корпуса только в диапазоне от 0° до 90° для оптимальной регистрации эффекта расслаивания потока убранной массы в процессе его выброса из зернового элеватора с помощью метода съемки изображений. За счет перемещения устройства регистрации изображений или отдельных детекторов изображений возможно сканирование потока убранной массы или регистрация и определение качества состава потока убранной массы со всех сторон при использовании только двух детекторов изображений для съемки изображений. Приводное устройство с держателем для перемещения части корпуса легко осуществимо. В качестве примера можно предположить размещение в области головной части элеватора трубчатого участка, на котором может быть расположено подвижное устройство регистрации изображений.
Вследствие множества возможных измерений посредством устройства регистрации изображений предложенное устройство по изобретению в каждом описанном примере технического выполнения пригодно для эффективного контроля потока убранной массы при его разгрузке в контейнер и для наблюдения за техническими устройствами. Анализ результатов измерений или оценка изображений в устройстве управления позволяет выполнять оптимизацию параметров настройки рабочих аппаратов в процессе уборки для обеспечения постоянного качества убранной массы в зерновом бункере. Другие преимущества устройство регистрации изображений дает при мониторинге износа технических устройств, например, подвижных частей, таких как лопасти элеватора. Благодаря мониторингу повышается надежность и долговечность самоходной сельхозмашины при уборке.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения. На чертежах:
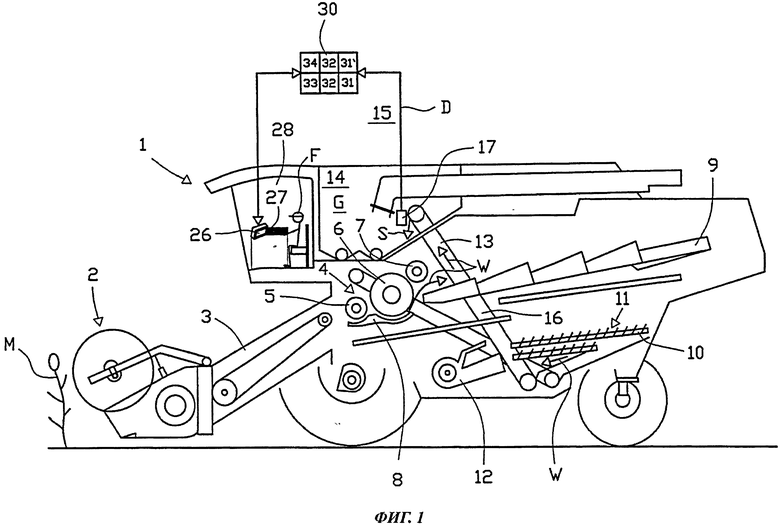
фиг.1 схематично изображает в разрезе самоходную сельскохозяйственную уборочную машину с системой регистрации и определения состава сыпучего материала,
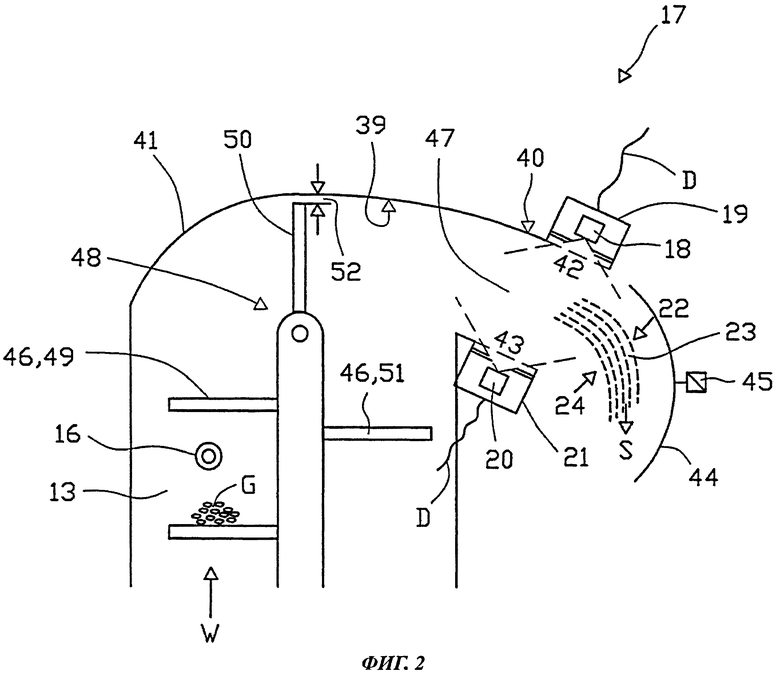
фиг.2 изображает на виде сбоку с разрезом устройство для регистрации изображений на выходе зернового элеватора.
Осуществление изобретения
На фиг.1 схематично показан пример выполнения самоходной сельскохозяйственной уборочной машины 1 с устройством 15 по изобретению. В показанном примере выполнения машиной является зерноуборочный комбайн 1. Устройство 15 по изобретению состоит по существу из двух компонентов, - устройства 17 регистрации изображений и устройства 30 управления. С помощью устройства 17 регистрации изображений перед разгрузкой потока S убранной массы в контейнер 14 генерируются изображения или серии изображений потока S убранной массы. Полученные изображения или серии изображений передаются на устройство 30 управления. В устройстве 30 управления изображения или серии изображений анализируются для оценки состава убранной массы G. На основе результатов анализа через посредство устройства 30 управления может производиться автоматическое или ручное воздействие на параметры настройки рабочих аппаратов комбайна 1. Это воздействие направлено на получение по возможности постоянного качества убранной массы G в зерновом бункере 14. Следует специально отметить, что устройство 15 по изобретению никоим образом не ограничивается использованием в зерноуборочном комбайне 1.
Материал М убранной массы убирается с помощью известных средств жатвенного аппарата 2 и наклонного питателя 3 и обрабатывается с помощью известных рабочих аппаратов, таких как молотильное устройство 4, состоящее из барабана 5 предварительного разгона, молотильного барабана 6, отбойного барабана 7 и подбарабанья 8, сепарирующего устройства, состоящего из соломотряса 9, области 10 возврата, и очистного устройства 11 с вентилятором 12, для получения урожайной убранной массы G. В отношении отдельных процессов в комбайне 1 здесь дается ссылка на близкие примеры выполнения решений уровня техники, описанные в патентном документе ЕР 1763988 А1. Поток S убранной массы подается зерновым элеватором 13 по пути W транспортирования к зерновому бункеру 14.
Устройство 15 для регистрации и определения состава убранной массы G обеспечивает квалифицированное заключение о составе потока S убранной массы в процессе обработки материала М убранной массы при разгрузке потока S убранной массы в зерновой бункер 14, чтобы создать возможность изменения параметров настройки, например, наиболее важных рабочих аппаратов 4, 5, 6, 7, 8, 9, 10, 11, 12 комбайна 1. Устройство 15 содержит устройство 17 регистрации изображений, состоящее из двух детекторов 18, 20 изображений, которые показаны на фиг.2 и расположены в частях 19, 21 корпуса, а также устройство 30 управления с блоком 31 памяти и блоком 32 выбора. Устройство 30 управления с блоком 31 памяти и блоком 32 выбора соответствуют системе по ЕР 1763988 А1. Само собой разумеется, что устройство 30 управления в целом и содержащиеся в нем компьютерная программа 33, блок 32 выбора и записанные в блоках 31, 31' памяти контрольные изображения адаптированы для настоящего изобретения таким образом, чтобы обеспечивать автоматический анализ полученных изображений или серий изображений в отношении состава потока S убранной массы.
Зарегистрированные устройством 17 регистрации изображений изображения или серии изображений потока S убранной массы подаются на устройство 30 управления. Компонентами устройства 30 управления являются также блок 34 анализа изображений и, по меньшей мере, один дополнительный блок 31' памяти для записи актуальных изображений или серий изображений, при этом в блоке 31 памяти записываются изображения или серии изображений, зарегистрированные устройством 17 регистрации изображений. В блоке 31' памяти записаны необходимые для анализа изображения или признаки изображений. Так например, зарегистрированные изображения или серии изображений, которые показывают поток S убранной массы с различных направлений, или изображения, которые документируют износ лопастей 46 элеватора, записываются в блоке 31 памяти. Направляемые на устройство 30 управления изображения или серии изображений или результаты анализа могут дополнительно направляться на пользовательский терминал, который состоит из устройства отображения/дисплея 26 и операторского устройства 27 в кабине 28 водителя комбайна 1. Эти изображения или серии изображений могут, например, отображаться для оператора F самоходной сельскохозяйственной уборочной машины 1, так что он может предпринимать, например, ручное изменение или оптимизацию параметров настройки рабочих аппаратов 4, 5, 6, 7, 8, 9, 10, 11, 12. В зависимости от предварительной настройки операторского устройства 27 изменение параметров настройки рабочих аппаратов 4, 5, 6, 7, 8, 9, 10, 11, 12 может также производиться автоматически устройством 30 управления.
Применительно к комбайну 1 устройство 17 регистрации изображений по изобретению расположено в области головной части 41 зернового элеватора 13. Показанное устройство 17 регистрации изображений снабжено двумя детекторами 18, 20 изображений, с помощью которых регистрируются изображения или серии изображений потока S убранной массы, выходящего из зернового элеватора 13. В качестве детекторов 18, 20 изображений используются две ПЗС-камеры. Другие данные относительно устройства регистрации изображений будут ясны из фиг.2.
На фиг.2 показано на виде сбоку с разрезом устройство 17 регистрации изображений в соответствии с изобретением, расположенное в области головной части 41 зернового элеватора 13. Описание и данные устройства 15 и устройства 30 управления, идентичные приведенным при описании со ссылкой на фиг.1, здесь не повторяются, а соответствующие элементы обозначены одними и теми же позициями.
Как было показано на фиг.1, устройство 30 управления соединено с устройством 17 регистрации изображений линией D передачи данных. Устройство 17 регистрации изображений может быть выполнено в различных вариантах. Оно может содержать от двух до четырех детекторов 18, 20 изображений стационарной установки или один или несколько подвижных детекторов 18, 20 изображений. Принцип состоит в том, чтобы с помощью оптической, регистрации при использовании детекторов изображений регистрировать расслоение потока S убранной массы в зерновом элеваторе 13 при разгрузке потока в контейнер 14 для целей определения качества убранной массы. В всех трех вариантах выполнения устройства 15 способ регистрации и оценки идентичен. Из трех технических вариантов выполнения устройства 17 регистрации изображений на фиг.2 показан предпочтительный первый пример выполнения с двумя стационарными детекторами 18, 20 изображений. Два детектора 18, 20 изображений расположены на выходе головной части 41 элеватора, на выпуске 40 напротив друг друга, то есть на угловом расстоянии 180° друг от друга. Расположение детекторов 18, 20 изображений выбрано таким, что детектор 18 изображений снимает поток S убранной массы с верхней стороны 22, а детектор 20 изображений снимает поток S убранной массы с нижней стороны 24, и оба детектора создают изображения или серии изображений потока S убранной массы. Регистрируемые изображения или серии изображений подаются на устройство 30 управления для дальнейшей обработки.
В варианте выполнения устройства 17 регистрации изображений (на фиг.2 не показан) на каждой из двух боковых сторон выпуска 40 дополнительно расположен детектор изображений. При наличии в сумме четырех детекторов 18, 20 изображений обеспечивается возможность регистрации потока S убранной массы со всех сторон, при этом каждый детектор 18, 20 изображений расположен перпендикулярно наружной поверхности 23 потока S убранной массы. Этот пример выполнения устройства 17 регистрации изображений соответствует указанному второму варианту выполнения.
Угол раскрытия обзора каждого детектора 18, 20 изображений образует область 42, 43 обзора. В пределах областей 42, 43 обзора на выпуске 40 головной части 41 элеватора расположен датчик выхода продукта в виде отбойного щитка 44 и предназначенного для него датчика 45 весовой силы, который может работать альтернативно датчику выхода продукта, выполненного в виде фотоячейки 16. Детекторы 18, 20 изображений регистрируют, с одной стороны, высоту заполнения убранной массы G в области головной части 41 элеватора с дальнейшей обработкой изображений в устройстве 30 управления. Результат способа обработки изображений может визуально отображаться для водителя F на дисплее 26 операторского устройства 27 в кабине 28 водителя. Кроме того, в ходе мониторинга эксплуатационного состояния датчика выхода продукта детекторы 18, 20 изображений регистрируют возможные загрязнения поверхности отбойного щитка 44, которые могут искажать результат измерения выхода продукта. В зависимости от степени загрязнения поверхности отбойного щитка 44 он освобождается от отложений, например, с помощью автоматического очистного устройства.
Расположенный на верхней стороне 22 выпуска 40 детектор 18 изображений своей областью 42 обзора снимает в разгрузочном окне 47 лопасть 46 элеватора, совершающую поворот в головной части 41 зернового элеватора 13. Кроме того, в разгрузочном окне 47 в область обзора попадает область 48 поворота лопатки 46 элеватора от движения вверх до движения вниз. Область 48 поворота начинается, когда движущаяся вверх лопасть 46 элеватора отходит от своего горизонтального положения 49 и переходит в вертикальное положение 50. Область поворота 48 заканчивается, когда движущаяся вниз лопасть 46 элеватора вновь занимает свое горизонтальное положение 51. При переходе поворачивающейся поднимающейся лопасти 46 элеватора из горизонтального положения 49 в вертикальное положение 50 производится запуск устройства 17 регистрации изображений. При запуске начинается съемка изображения или серии изображений потока S убранной массы детекторами 18, 20 изображений.
В области 48 поворота ускоряется убранная масса G, транспортируемая лопастью 46 элеватора. Вследствие ускорения в области 48 поворота создаются воздействующие на поток S убранной массы центробежные силы, в результате чего при разгрузке убранной массы G происходит расслаивание. Благодаря устройству 17 регистрации изображений можно определять состав убранной массы G посредством метода обработки изображений.
Для запуска устройства 17 регистрации изображений может использоваться также предназначенный для зернового элеватора 13 датчик 16 выхода продукта. Как уже было указано, датчик представляет собой фотоячейку 16, которая воспринимает зерновую убранную массу G на лопасти 46 элеватора. Запуск устройства 17 регистрации изображений производится только тогда, когда на лопасти 46 имеется убранная масса G. За счет этого устраняется ненужная съемка изображения или серии изображений.
Далее, имеется возможность с помощью верхнего, расположенного на выпуске 40 детектора 18 изображений устройства 17, регистрации изображений дополнительно оптически регистрировать техническое состояние верхней поверхности и кромок лопасти 46 элеватора или ее дефекты. Оптические изображения или серии изображений лопасти 46 элеватора могут отображаться для водителя F на дисплее 26 операторского устройства. Результат оценки может отображаться для водителя F в качестве визуального указания на операторском устройстве 27. Визуальное указание относится к техническому состоянию лопасти 46 элеватора.
В отличие от этого с помощью нижнего, расположенного на выпуске 40 детектора 20 изображений устройства 17 регистрации изображений имеется дополнительная возможность оптически регистрировать расстояние от поднимающейся лопасти 46 элеватора до стенки 39 головной части элеватора. Оптические изображения или серии изображений лопасти 46 элеватора и стенки 39 головной части элеватора направляются на устройство 30 управления для оценки. Вычисленное расстояние 52 между лопастью 46 элеватора и стенкой 39 головной части элеватора отображается для водителя F на дисплее операторского устройства 27. Если вычисленная величина не достигает предварительно заданной величины, это является знаком того, что натяжение несущей лопасти 46 приводной цепи элеватора слишком мало или что необходима замена цепи вследствие ее износа. Цепь является несущим элементом лопастей 46 элеватора, расположенных на ней на равномерном расстоянии друг от друга.
В третьем описанном варианте выполнения устройства 15 согласно изобретению предусмотрено, что, по меньшей мере, один, а предпочтительно оба детектора 18, 20 изображений расположены с возможностью передвижения. Этот пример выполнения представлен на фиг.2 не полностью. Для этого часть 19, 21 корпуса, в которой размещен детектор 18, 20 изображений, расположен подвижно на выпуске 40. Для смещения часть 19, 21 корпуса с помощью соединительного средства соединена с не показанным приводным устройством. Выпуск 40 выполнен с продольной щелью, через которую может производиться съемка изображения или серии изображений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВКИ РАБОЧЕГО АППАРАТА УБОРОЧНОЙ СЕЛЬХОЗМАШИНЫ | 2006 |
|
RU2406288C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2014 |
|
RU2647087C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УБОРОЧНОЙ СЕЛЬХОЗМАШИНОЙ | 2006 |
|
RU2402191C2 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА УБРАННОЙ МАССЫ | 2008 |
|
RU2483522C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И УСТРОЙСТВО ОТОБРАЖЕНИЯ ДЛЯ НЕГО | 2010 |
|
RU2527759C2 |
| САМОХОДНАЯ УБОРОЧНАЯ СЕЛЬХОЗМАШИНА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2006 |
|
RU2420943C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ОБРАБОТКИ УБРАННОГО МАТЕРИАЛА В ЗЕРНОУБОРОЧНОМ КОМБАЙНЕ И ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2012 |
|
RU2580420C2 |
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2711340C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2008 |
|
RU2457659C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧЕЙ СЕЛЬХОЗМАШИНОЙ | 2008 |
|
RU2482654C2 |
Изобретение относится к сельскому хозяйству. Устройство для регистрации и определения состава сыпучего материала содержит устройство регистрации изображений, по меньшей мере одно устройство управления, по меньшей мере один блок памяти и блок выбора. Устройство регистрации изображений содержит по меньшей мере два детектора изображений, выполненных с возможностью съемки изображений или серии изображений потока убранной массы через равные промежутки времени или непрерывно. Детекторы изображений размещены в направлении окружного периметра, предпочтительно с угловым смещением на 180˚ относительно друг друга. Один детектор изображений расположен примерно перпендикулярно верхней стороне наружной поверхности убранной массы. Другой детектор изображений размещен примерно перпендикулярно нижней стороне наружной поверхности потока убранной массы. Устройство для регистрации и определения состава сыпучего материала улучшает определение качества убранного материала. 10 з.п. ф-лы, 2 ил.
1. Устройство (15) для регистрации и определения состава сыпучего материала, содержащее устройство (17) регистрации изображений, по меньшей мере, одно устройство (30) управления, по меньшей мере, один блок (31) памяти и блок (32) выбора для того, чтобы при разгрузке потока (S) убранной массы в контейнер (14) сельскохозяйственной уборочной машины (1) обеспечивать возможность квалифицированного заключения о составе убранной массы (G) в процессе обработки материала убранной массы для обеспечения возможности изменения параметров настройки рабочих аппаратов (4, 5, 6, 7, 8, 9, 10, 11, 12) сельскохозяйственной уборочной машины (1) в процессе обработки материала убранной массы,
отличающееся тем, что устройство (17) регистрации изображений содержит, по меньшей мере, два детектора (18, 20) изображений, которые выполнены с возможностью съемки изображений или серий изображений потока (S) убранной массы через равные промежутки расстояния или непрерывно, и которые расположены в направлении окружного периметра на воображаемой окружности, предпочтительно с угловым смещением на 180° относительно друг друга, причем один детектор (18) изображений расположен примерно перпендикулярно верхней стороне (22) наружной поверхности (23) потока (S) убранной массы, выходящего из головной части (41) зернового элеватора или из разгрузочной трубы, а другой детектор (20) изображений расположен примерно перпендикулярно нижней стороне (24) наружной поверхности (23) потока (S) убранной массы.
2. Устройство (15) по п.1, отличающееся тем, что детекторы (18, 20) изображений расположены один напротив другого.
3. Устройство (15) по п.1, отличающееся тем, что нижний детектор (18) изображений расположен на головной части (41) элеватора или на разгрузочной трубе так, что с помощью метода оценки изображений может определяться высота заполнения в головной части (41) элеватора или разгрузочной трубы, которая может отображаться на устройстве (26) отображения операторского устройства (27).
4. Устройство (15) по п.1, отличающееся тем, что устройство (30) управления выполнено с возможностью определять с помощью специального алгоритма объемный расход потока (S) убранной массы и сжимаемость убранной массы (G).
5. Устройство (15) по любому из пп.1-4, отличающееся тем, что текущий между двумя детекторами (18, 20) изображений поток (S) убранной массы освещается одним из двух детекторов (18, 20) изображений, а детектор (18, 20) изображений, находящийся напротив освещающего детектора (18, 20) изображений, детектирует еще проходящий свет.
6. Устройство (15) по любому из пп.1-4, отличающееся тем, что запуск устройства (17) регистрации изображений для начала съемки изображений или серий изображений производится лопастью (46) элеватора, когда лопасть (46) элеватора достигает начала области (48) поворота в головной части (41) элеватора.
7. Устройство (15) по любому из пп.1-4, отличающееся тем, что предусмотрен датчик (16) выхода продукта для запуска устройства (17) регистрации изображений для начала съемки изображений или серий изображений.
8. Устройство (15) по любому из пп.1-4, отличающееся тем, что верхний детектор (18) изображений при холостой работе зернового элеватора (13) генерирует изображения или серии изображений лопастей (46) элеватора, которые могут отображаться на устройстве (26) отображения и/или могут сравниваться в устройстве (30) управления с выбранными изображениями для установления износа лопастей (46) элеватора.
9. Устройство (15) по любому из пп.1-4, отличающееся тем, что нижний детектор (20) изображений при холостой работе зернового элеватора (13) генерирует изображения или серии изображений лопастей (46) элеватора и стенки (39) головной части элеватора, которые служат для определения расстояния (52) от лопасти (46) элеватора до стенки (39) головной части элеватора.
10. Устройство (15) по любому из пп.1-4, отличающееся тем, что устройство (17) регистрации изображений содержит до четырех детекторов (18, 20) изображений, которые выполнены с возможностью съемки изображений или серий изображений потока (S) убранной массы через равные промежутки расстояния или непрерывно, и которые расположены в направлении окружного периметра на воображаемой окружности, предпочтительно с угловым смещением на 90° относительно друг друга, причем один детектор (18) изображений расположен примерно перпендикулярно верхней стороне (22) наружной поверхности (23) потока (S) убранной массы, выходящего из головной части (41) зернового элеватора или из разгрузочной трубы, другой детектор (20) изображений расположен примерно перпендикулярно нижней стороне (24) наружной поверхности (23) потока (S) убранной массы, а два расположенных напротив друг друга детектора изображений расположены примерно перпендикулярно боковым сторонам наружной поверхности (23) потока (S) убранной массы.
11. Устройство (15) по любому из пп.1-4, отличающееся тем, что устройство (17) регистрации изображений содержит, по меньшей мере, один детектор (18, 20) изображений, который расположен примерно перпендикулярно верхней стороне (22) наружной поверхности (23) потока (S) убранной массы, выходящего из головной части зернового элеватора или из разгрузочной трубы с возможностью перемещения по дуге окружности, при этом смещение детектора (18, 20) изображений производится по дуге окружности от 0° до 180°.
| Устройство для измерения ускорения | 1990 |
|
SU1763988A1 |

