Область техники
Настоящее изобретение относится к самоходной уборочной машине, в частности, к зерноуборочному комбайну, обладающей признаками в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
В самоходных уборочных машинах, таких как зерноуборочные комбайны, полевые измельчители и подобные машины, имеется множество машинных параметров, которые подлежат настройке во время процесса уборки. Путем настройки этих машинных параметров может достигаться по меньшей мере частичная автономная настройка и оптимизация соответствующего процесса уборки.
Выполненная в виде зерноуборочного комбайна самоходная уборочная машина служит для уборки и обмолота зерновых культур. Уборочная машина оснащена целым рядом рабочих органов, таких как жатвенный аппарат, молотильный аппарат, сепарирующее устройство, очистное устройство и разбрасыватель. Обмолот производится с помощью молотильного аппарата, который извлекает зерновую массу из принятой жатвенным аппаратом убранной массы, а затем эта убранная масса после обмолота проходит сепарирование и очистку и зерно подается в зерновой бункер. В качестве других фракций убранной массы остаются, например, солома и полова, которые либо распределяются на поле, либо, - это касается соломы, - могут укладываться в валок, например, для последующего подбора тюковым прессом. Здесь и в дальнейшем под понятием «убранная масса» следует понимать весь принимаемый молотильным аппаратом поток материала, то есть включая зерно, которое еще не было извлечено из убранной массы в качестве зерновой массы, а также включая то зерно, которое остается в потоке убранной массы в качестве потерь и выгружается вместе с соломой.
В молотильном аппарате зерно вытесняется из соломы по принципу интенсивной обработки трением, - вымолачивается, - и отделяется от остального потока убранной массы, так что оно может подаваться непосредственно на очистку. Остальной поток убранной массы подается в область сепарирования, в которой, например, с помощью соломотряса из него отделяется оставшееся зерно и также направляется на очистку.
Кроме того, из патентного документа DE 102009009767 А1, являющегося прототипом для настоящего изобретения, известен зерноуборочный комбайн с системой содействия водителю, которая измеряет в комбайне различные параметры процесса уборки и проверяет, не достигли ли они критической области или не перешли ли верхний или нижний пределы. В случае такой ситуации система содействия водителю интерактивно связывается с водителем, при этом водителю предлагаются меры по настройке молотильного аппарата, которые должны выводить из критической области. Здесь для системы содействия водителю предназначена система датчиков процесса уборки, содержащая множество датчиков процесса уборки, в помощью которых могут определяться вытекающие из процесса параметры процесса уборки. Параметры процесса уборки поясняют текущий процесс уборки и служат основой для оптимизации.
Недостаток указанной уборочной машины с системой датчиков процесса уборки, определяющей различные параметры процесса уборки, состоит в том, что настройка заданного состояния процесса уборки всегда связана с определенным переходным процессом до получения целевого состояния процесса уборки. В первую очередь это обусловлено тем, что лежащие в основе оптимизации параметры процесса уборки сами зависят от процесса уборки.
Известны также уборочные машины, в которых настройка машинных параметров базируется на сигналах датчиков окружающей среды. Примером этого служит опережающее основанное на датчиках определение характеристик полевой растительности, которое может осуществляться на уборочной машине (DE 102011085380 А1). Другим примером является опережающее основанное на датчиках определение характеристик полевой растительности с помощью датчиков окружающей среды, расположенных на летательном аппарате (DE 102010038681 А1).
Недостатком известных систем с датчиками окружающей среды слабое систематическое привлечение полученных сигналов датчиков к управлению рабочими органами. По этой причине не удается получать систематическое улучшение указанного выше переходного режима.
Раскрытие изобретения
Задачей настоящего изобретения является выполнение и усовершенствование известной самоходной уборочной машины для оптимизации управления рабочими органами уборочной машины в отношении характеристик переходного режима.
Существенной является основная изобретательская идея о том, чтобы в управление полями характеристических кривых, с помощью которого в принципе за счет текущего специфического для рабочих органов регулирования машинных параметров уже может достигаться эффективное управление рабочими органами, целенаправленно ввести данные окружающей среды для дальнейшего улучшения переходного режима. В соответствии с изобретением в запоминающем устройстве системы помощи водителю записана функциональная системная модель для, по меньшей мере, части уборочной машины, образующая основу, в частности, для самостоятельного определения по меньшей мере одного параметра молотильного аппарата. Термин «функциональная системная модель» означает, что она отображает, по меньшей мере, часть функциональных взаимосвязей внутри уборочной машины.
Для пояснения следует заметить, что термин «окружающая среда» направлен на внешнюю среду самоходной уборочной машины. Другими словами, он не относится к тому, что происходит внутри машины. К информации об окружающей среде относится пространственная зона действия, находящаяся в окружающей среде уборочной машины. Пространственная зона действия информации об окружающей среде определяет, какая пространственная зона в окружающей среде уборочной машины описывается данной информацией об окружающей среде.
Предлагаемый учет данных окружающей среды имеет преимущества в том отношении, что эти данные могут влиять на процесс уборки, однако как правило не зависят от процесса уборки.
Для учета по меньшей мере одной информации об окружающей среде в соответствии с изобретением предлагается два альтернативных варианта.
В первом альтернативном варианте предлагается определять или модифицировать лежащую в основе управления полями характеристических кривых системную модель в зависимости от по меньшей мере одной информации об окружающей среде. Это определение может осуществляться, например, посредством выбора полей характеристических кривых в зависимости от данных окружающей среды. Предпочтительно модификация производится путем параметризации соответствующих полей характеристических кривых в зависимости от по меньшей мере одной информации об окружающей среде.
Во втором альтернативном варианте предлагается накладывать на управление полями характеристических кривых контур управления на основе по меньшей мере одной информации об окружающей среде. В самом общем смысле это означает, что регулирование машинных параметров возможно «в обход управления полями характеристических кривых».
Следует заметить, что термин «управление» здесь имеет широкий смысл. Он охватывает как управление в узком смысле, при котором при регулировании не предусмотрена обратная связь. Однако он охватывает также регулирование, при котором обратная связь как раз предусмотрена.
Пункт 2 формулы изобретения относится к предпочтительным примерам осуществления, в которых по меньшей мере один рабочий орган совместно с системой содействия водителю образует по меньшей мере один рабочий автомат. Это означает, что система помощи водителю со своим запоминающим устройством для записи данных и своим процессором выполнена с возможностью на основе системной модели самостоятельно определять отдельные машинные параметры рабочего органа и задавать их молотильному аппарату. Основу для определения машинных параметров образует выбор пользователем стратегий процесса уборки, которые записаны в запоминающем устройстве системы помощи водителю.
В предлагаемом решении по реализации по меньшей мере одного рабочего автомата при единичном выборе водителем активной стратегии процесса уборки может быть задан вид и характер управления рабочим органом. При этом для определения машинных параметров в более узком смысле от водителя не требуется дополнительного ввода. Однако водитель имеет возможность изменять по желанию выбранную стратегию процесса уборки, после чего дальше следует самостоятельное управление, но с другой приоритетностью.
В другом предпочтительном примере осуществления по пункту 4 помимо данных окружающей среды учитываются также параметры процесса уборки, которые влияют на текущий процесс уборки. Таким образом, в этом варианте управление рабочими органами осуществляется как на основе данных окружающей среды, в основном не зависящих от процесса уборки, так и на основе параметров процесса уборки, которые являются результатом процесса уборки и поэтому зависят от него.
Реализация центрального устройства обработки данных по пункту 5 имеет преимущества, так как обеспечивает возможность генерирования данных окружающей среды из данных датчиков окружающей среды особенно гибким образом. Под данными датчиков окружающей среды имеются в виду еще не обработанные или только предварительно обработанные данные датчиков, полученные из сигналов датчиков. Такие данные датчиков могут быть физическими данными расстояний, данными изображений и др. В отличие от них информация об окружающей среде относится к величинам переменных, величина которых оказывает повторяемое воздействие на процесс уборки. В принципе устройство обработки данных может также только передавать сигналы отдельных датчиков окружающей среды на систему помощи водителю.
С помощью устройства обработки данных по изобретению возможна определенная «увязка» сигналов датчиков окружающей среды таким образом, что существование нескольких датчиков может использоваться лучшим образом в аспекте информационной технологии. Примером этого является создание избыточности в отношении информации об окружающей среде за счет получения информации об окружающей среде из нескольких сигналов датчиков окружающей среды с одинаковым информационным контентом. Другим примером является генерирование информации об окружающей среде из нескольких сигналов датчиков окружающей среды с различным информационным контентом. Такая информация об окружающей среде не может быть генерирована при наличии всего одного датчика окружающей среды (пункт 7).
Согласно пункту 6 датчики окружающей среды могут воспринимать множество различных аспектов окружающей среды уборочной машины. К ним относятся, например, полевая растительность, геометрические данные занятого растительностью поля или информация об окружающей среде, относящаяся к окружающей среде поля.
Согласно особенно предпочтительным примерам осуществления по пунктам 9 и 10 к определению машинных параметров привлекается зона действия соответствующей информации об окружающей среде. Это позволяет предварительно определять установку машинных параметров для лежащей в будущем точки времени процесса, что противодействует тенденции к колебаниям при настройке заданного режима процесса (пункт 10).
Пункты 11-14 относятся к примеру выполнения рабочего органа в виде молотильного аппарата и описывают взаимосвязи между данными окружающей среды и машинными параметрами, которые могут быть реализованы с помощью предлагаемой самоходной уборочной машины.
И наконец, согласно предпочтительному примеру осуществления по пункту 15 предусмотрено, что информация об окружающей среде учитывается также регулятором хода самоходной уборочной машины, в частности, при настройке скорости движения для обеспечения заданного расхода убранной массы. Так, например, при опережающем по времени учете информации об окружающей среде «плотность растительности» может легко настраиваться на заданную величину высота слоя, представляющая расход.
Краткое описание чертежей
Другие особенности, признаки, задачи и преимущества изобретения будут описаны на предпочтительном примере осуществления со ссылками на прилагаемые чертежи. На чертежах:
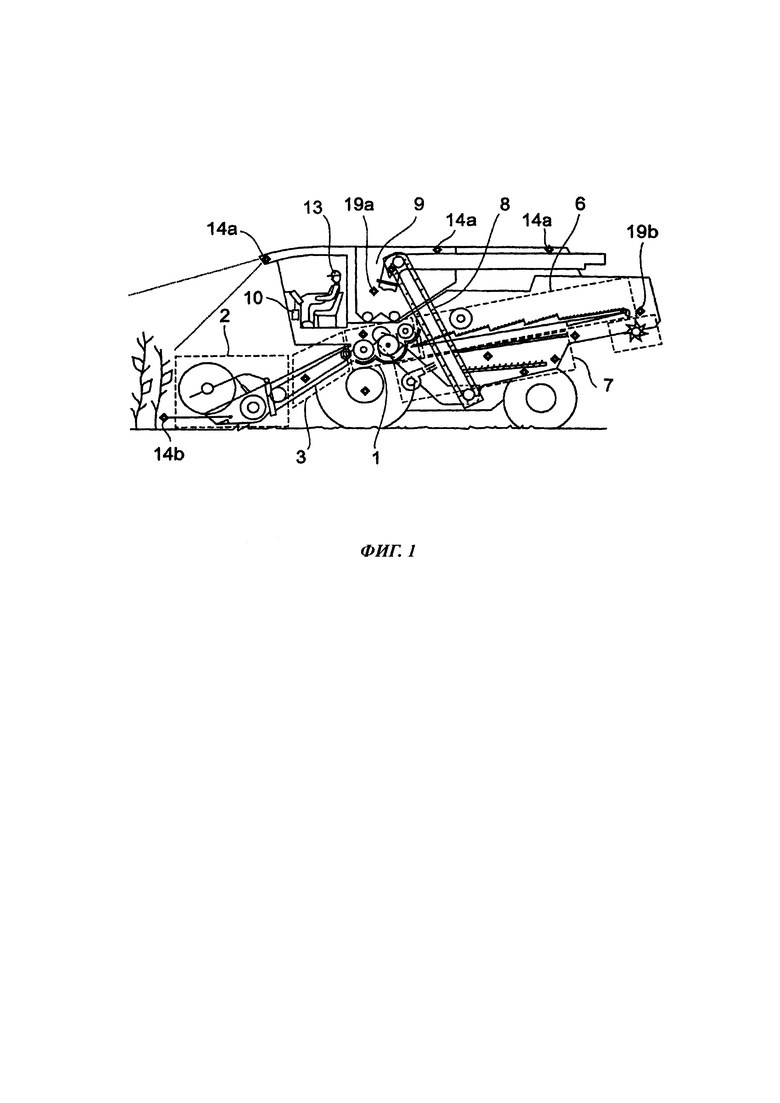
фиг. 1 изображает на виде сбоку предлагаемый зерноуборочный комбайн,
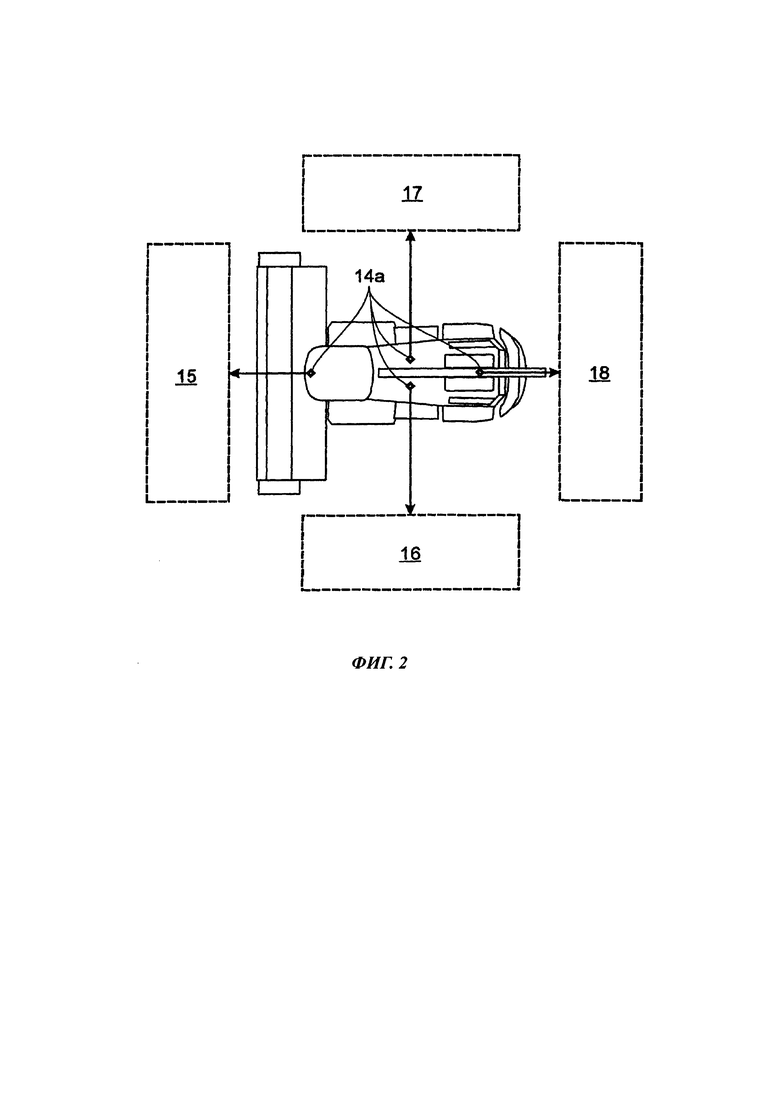
фиг. 2 изображает зерноуборочный комбайн по фиг. 1 на виде сверху,
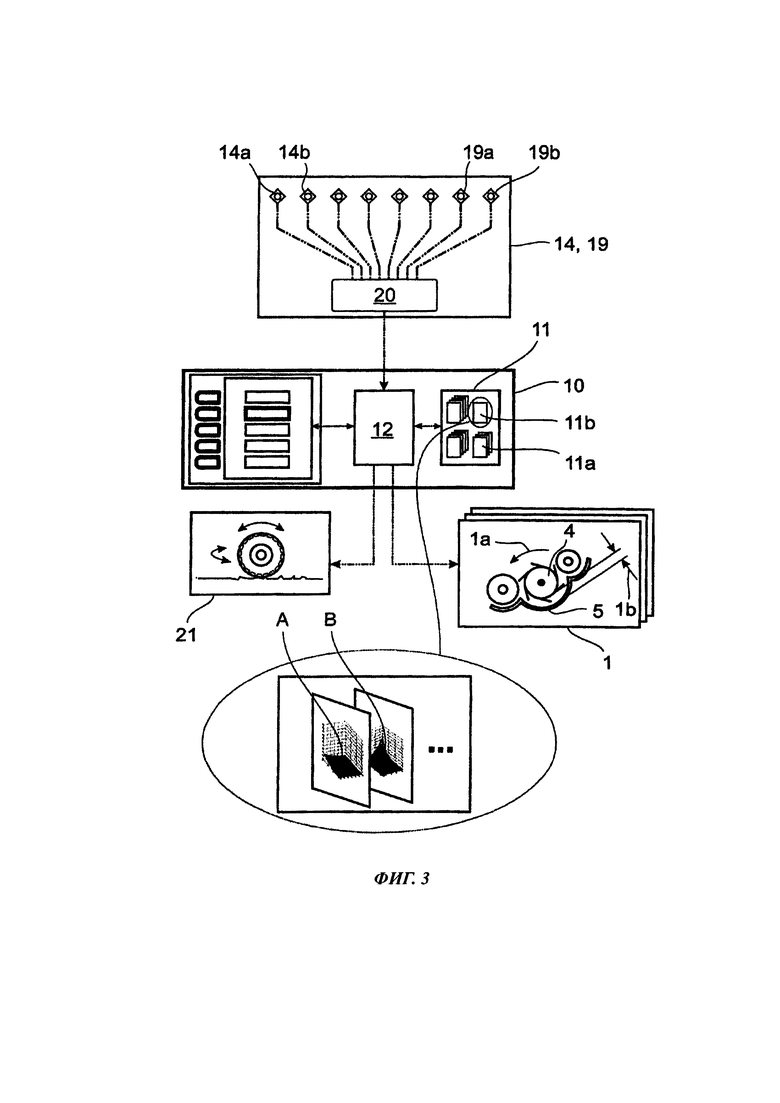
фиг. 3 изображает схему системы помощи водителю зерноуборочного комбайна по фиг. 1,
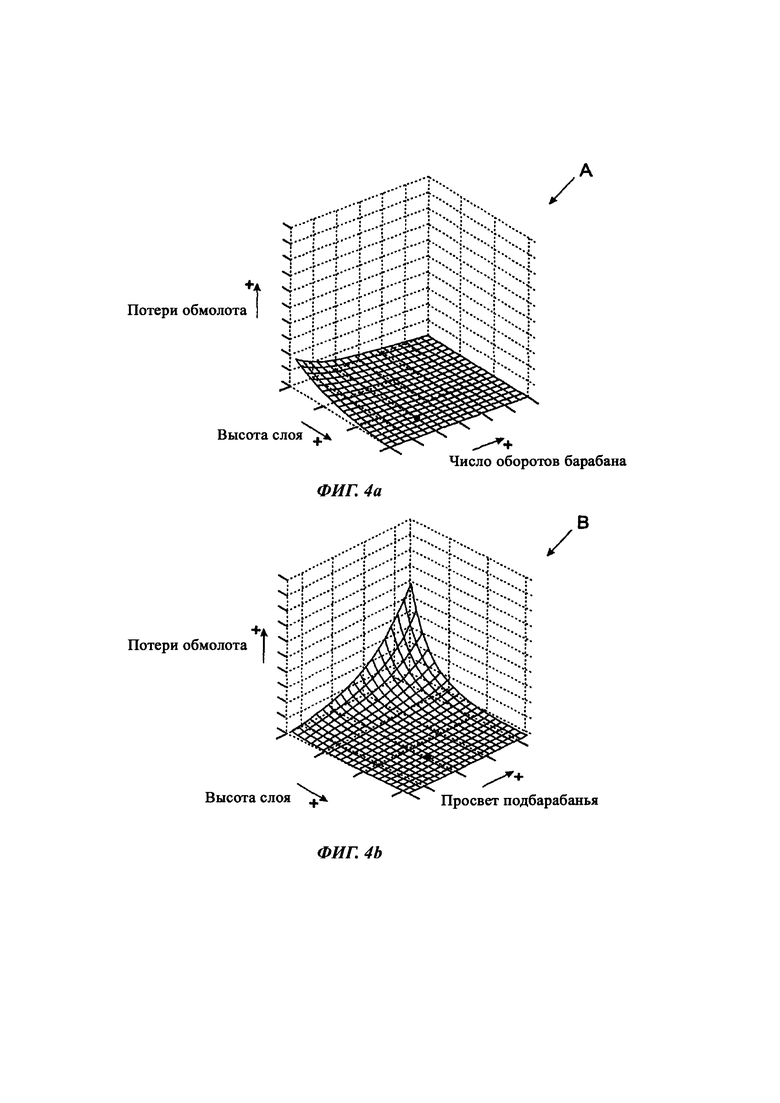
фиг. 4 изображает в качестве примера два поля характеристических кривых системной модели для параметров процесса уборки «потери обмолота» с входными величинами а) «высота слоя» и «число оборотов барабана» и b) «высота слоя» и «просвет подбарабанья».
Осуществление изобретения
Предлагаемая самоходная уборочная машина может быть предназначена для различных случаев использования. Дальнейшее описание дано применительно к зерноуборочному комбайну в качестве самоходной уборочной машины. Все примеры выполнения системы для зерноуборочного комбайна равным образом действительны для всех других видов самоходных уборочных машин, в частности, для полевых измельчителей. В принципе система уборки может охватывать несколько уборочных машин.
Показанный зерноуборочный комбайн содержит молотильный аппарат 1 для обмолота принимаемой убранной массы и получения зерновой массы. При этом под убранной массой следует понимать весь собранный с поля и подаваемый к молотильному аппарату 1 материал, а зерновой массой обозначается зерно, полученное зерноуборочным комбайном из убранной массы. Как видно из фиг. 1, полевая растительность скашивается жатвенным аппаратом 2 комбайна, а принятая убранная масса подается наклонным питателем 3 к молотильному аппарату 1.
Молотильный аппарат 1 оснащен молотильным барабаном 4, который взаимодействует с подбарабаньем 5. По ходу процесса за молотильным аппаратом 1 установлено сепарирующее устройство 6. Таким образом, подаваемый к молотильному аппарату 1 поток убранной массы далее, - без извлеченной из него зерновой массы, - подается к сепарирующему устройству 6.
В принципе молотильный аппарат 1 служит для извлечения трением преимущественной части зерновой массы из соломы убранной массы в ходе процесса обмолота. После этого в сепарирующем устройстве 6 убранная масса с еще оставшимся в ней зерном перемещается, например, встряхивается таким образом, что оставшаяся зерновая масса выделяется из соломы и остальной убранной массы. Затем зерновая масса, полученная в молотильном аппарате 1 и в сепарирующем устройстве 6, подается к очистному устройству 7. В очистном устройстве 7, которое обычно бывает многоступенчатым, от зерновой массы отделяются подаваемые вместе с ней фракции, например, полова и соломенная труха, а также необмолоченный материал, такой как верхушки колосьев или ости зерен. В заключение очищенная зерновая масса поступает по транспортирующему устройству 9, например, зерновому элеватору, в зерновой бункер 9а. Вымолоченная солома, - то есть убранная масса, оставшаяся в сепарирующем устройстве 6, - выгружается из комбайна, например, в виде валка вдоль колеи движения.
Перечисленные выше рабочие органы могут управляться путем задания им различных индивидуальных машинных параметров. Так например, молотильный аппарат 1 может управляться путем задания ему параметров молотильного аппарата. В зависимости от конструкции молотильного аппарата 1 к ним относятся эксплуатационные параметры, такие как число 1а оборотов барабана или другие числовые характеристики движения молотильного барабана 4, а также просвет 1b подбарабанья, то есть расстояние между молотильным барабаном 4 и подбарабаньем 5. Если молотильный аппарат 1 содержит шасталки для очистки зерна от остей, они могут также быть представлены в параметрах настройки молотильного аппарата 1.
Далее, уборочная машина содержит систему 10 помощи водителю для настройки молотильного аппарата 1. Система 10 помощи водителю содержит запоминающее устройство 11 для записи данных, - то есть память в информационном отношении, - и процессор 12 для обработки записанных в запоминающем устройстве 11 данных. В принципе система 10 помощи водителю выполнена таким образом, чтобы оказывать содействие водителю 13 при управлении зерноуборочным комбайном. Система 10 помощи водителю с запоминающим устройством 11 и процессором 12 схематично показана на фиг. 2.
Далее, предусмотрена система 14 датчиков окружающей среды для восприятия по меньшей мере одной влияющей на процесс уборки информации об окружающей среде с пространственной зоной действия вокруг уборочной машины. В принципе зона действия информации об окружающей среде может лежать в передней, задней или боковой области уборочной машины (см. фиг. 2).
В показанном и предпочтительном примере осуществления система 14 датчиков окружающей среды расположена на уборочной машине. Однако альтернативно может быть предусмотрено, что система датчиков окружающей среды расположена на другой, идущей впереди уборочной машине. Далее, возможно расположение системы датчиков окружающей среды на отдельном от уборочной машины измерительном транспортном средстве или другим образом отдельно от уборочной машины.
В запоминающем устройстве 11 системы 10 помощи водителю записана функциональная системная модель 11b для по меньшей мере одной части зерноуборочного комбайна, при этом процессор 12 выполнен с возможностью самостоятельного определения по меньшей мере одного параметра 1а, 1b молотильного аппарата на основе системной модели 11b.
Функциональной системной моделью 11b является вычислительная модель для отображения функциональных взаимосвязей внутри комбайна. В частности, с помощью системной модели 11b для по меньшей мере одного параметра процесса уборки предназначено по меньшей мере одно поле А, В характеристических кривых, причем здесь этот параметр процесса уборки определен как выходная величина по меньшей мере одного поля А, В характеристических кривых, а в качестве входной величины по меньшей мере одного поля А, В характеристических кривых определен по меньшей мере один машинный параметр.
На фиг. 4 в качестве примера показаны два поля характеристических кривых. Здесь в качестве входных величин определены параметр процесса уборки «высота слоя» и машинный параметр, предпочтительно машинный параметр «число оборотов барабана» или машинный параметр «просвет подбарабанья».
Для отображения, например, относящихся к молотильному аппарату 1 функциональных взаимосвязей между параметром процесса уборки в качестве выходной величины и различными входными величинами для этого параметра процесса уборки предпочтительно предназначены первое поле А характеристических кривых и второе поле В характеристических кривых. При этом для первого поля А характеристических кривых входные величины образуют дополнительный параметр процесса уборки «высота слоя» и машинный параметр «число оборотов барабана» (фиг. 4а)), а для второго поля В входные величины образуют дополнительный параметр процесса уборки «высота слоя» и машинный параметр «просвет подбарабанья» (фиг. 4b)).
В отношении термина «высота слоя» следует отметить, что он имеет широкое значение и охватывает как в более узком смысле высоту слоя потока убранной массы, принимаемого молотильным аппаратом, так и расход потока убранной массы, проходящего через молотильный аппарат 1. Таким образом, во всех примерах выполнения это выражение относится как к высоте слоя, так и к расходу. В частности, термин «высота слоя» может быть заменен на термин «расход».
Предпочтительно в системной модели предусмотрены соответствующие поля характеристических кривых для параметров процесса уборки «потери обмолота» и «потери сепарирования», для представляющего нагрузку молотильного аппарата параметра процесса уборки «проскальзывание привода молотильного аппарата», для параметра процесса уборки «доля битого зерна» и для параметра процесса уборки «потери очистки».
Процессор 12 работает на основе системной модели 11b в качестве системы управления полями характеристических кривых. В общем смысле это означает, что, в частности, для самостоятельного определения машинных параметров процессор 12 берет за основу по меньшей мере одно поле характеристических кривых системной модели 11b. В отношении широкого понимания понятия «управление» следует обратиться к общей части описания.
При определении машинных параметров процессор 12 определяет или модифицирует системную модель 11b в зависимости от по меньшей мере одной информации об окружающей среде. Альтернативно или дополнительно может быть предусмотрено, что процессор 12 накладывает на управление полями характеристических кривых контур управления на основе по меньшей мере одной информации об окружающей среде.
В простейшем случае наложение контура управления на управление полями характеристических кривых означает, что процессор вычисляет или модифицирует подлежащие определению машинные параметры на основе по меньшей мере одной информации об окружающей среде. Однако наложение контура управления на управление полями характеристических кривых может также означать, что контур управления полями характеристических кривых ограничивается контуром на основе по меньшей мере одной информации об окружающей среде.
Предпочтительно по меньшей мере один рабочий орган, здесь молотильный аппарат 1, образует совместно с системой 10 помощи водителю рабочий автомат, здесь молотильный автомат. Согласно изобретению это осуществлено посредством того, что в запоминающем устройстве 11 записаны множество выбираемых стратегий 11а процесса уборки, а процессор 12 выполнен с возможностью того, чтобы для реализации выбранной стратегии 11а или стратегий 11а процесса уборки самостоятельно определять по меньшей мере один машинный параметр для молотильного аппарата 1 и задавать его для молотильного аппарата 1. Таким путем создается молотильный автомат, который координировано регулирует все величины, существенные для работы молотильного аппарата 1. При этом, в частности, устраняется посторонняя конкурирующая настройка, действующая противоположным образом. В отличие от этого настройка всех существенных параметров осуществляется «от одной руки». Водитель 13 может также задавать желаемый результат качества, и ему не требуется экспертных знаний для ввода требуемых подробностей для достижения этого результата.
При определении параметров молотильного аппарата речь идет о самостоятельном определении, так как в принципе стратегия 11а процесса уборки реализуется процессором 12 без необходимости вмешательства водителя 13 или направления ему запроса при определении параметров 1а, 1b в более узком смысле. Такое вмешательство водителя 13 в принципе возможно, но не необходимо. При этом записанные стратегии 11а процесса уборки отличаются заданием цели или оптимизацией параметров процесса уборки, как это будет описано дальше.
Следует отметить, что в принципе система 10 содействия водителю может быть выполнена централизованной. При этом она служит для настройки не только молотильного аппарата 1, но также расположенных перед ним и за ним рабочих органов, таких как жатвенный аппарат 2, наклонный питатель 3, сепарирующее устройство 6, очистное устройство 7 и разбрасыватель 8. Однако в принципе возможна также децентрализованная структура системы 10 помощи водителю, состоящая из ряда отдельных систем управления. В этом случае может быть, например, предусмотрено, что по меньшей мере часть рабочих органов комбайна снабжена относящейся к ним децентрализованной системой управления.
Предпочтительно процессор 12 выполнен с возможностью циклического определения машинных параметров и их задания соответствующему рабочему органу. Альтернативно или дополнительно процессор 12 выполнен с возможностью циклического определения или модификации системной модели 11b. При этом термин «циклически» следует понимать в широком смысле, и здесь он означает непрерывное установление, определение или модификацию с постоянной или переменной цикличностью.
Предпочтительно в дополнение к системе 14 датчиков окружающей среды уборочная машина оснащена системой 19 датчиков процесса уборки с несколькими датчиками для восприятия являющихся результатом процесса уборки параметров, таких как «потери обмолота», «доля битого зерна», «высота слоя», «потери сепарирования», «потери очистки», «проскальзывание привода молотильного аппарата», «потребление топлива», причем процессор 12 при определении машинных параметров учитывает параметры процесса уборки, создаваемые системой 19 датчиков процесса уборки.
Предпочтительно система 19 датчиков процесса уборки содержит несколько датчиков. Так например, система 19 датчиков процесса уборки содержит датчик 19а зерновой массы для восприятия информации о зерновой массе. При этом согласно фиг. 1 датчик 19а зерновой массы может быть выполнен в виде камеры для съемки зерновой массы. Датчик 19а зерновой массы может быть выполнен, в частности, с возможностью восприятия указанной выше доли битого зерна, доли не содержащих зерна фракций, доли остей колосьев и/или доли верхушек колосьев. Альтернативно или дополнительно, как это также показано на фиг. 1, система 19 датчиков процесса уборки может содержать датчик 19b валка для восприятия данных валка. При соответствующем выполнении датчик 19b валка может использоваться для восприятия доли зерна в валке. Эта доля зерна представляет потерю зерновой массы.
Здесь и предпочтительно система 14 датчиков окружающей среды содержит несколько датчиков 14а, 14b для генерирования данных датчиков окружающей среды, причем система 14 датчиков окружающей среды содержит также устройство 20 обработки данных, которое из данных датчиков окружающей среды вырабатывает информационные данные окружающей среды и предоставляет их системе 10 помощи водителю. В принципе устройство 20 обработки данных может также только передавать сигналы отдельных датчиков 14а, 14b окружающей среды в систему 10 помощи водителю.
Здесь и предпочтительно устройство 20 обработки данных взаимодействует не только с датчиками 14а, 14b окружающей среды, но также с датчиками 19а, 19b системы 19 датчиков процесса уборки и из данных процесса уборки генерирует соответствующие параметры процесса уборки. При этом устройство 20 обработки данных выполняет двойную роль. В принципе здесь также может быть предусмотрено, что устройство 20 обработки данных может также только передавать сигналы отдельных датчиков 19а, 19b процесса уборки в систему 10 помощи водителю.
Предпочтительно датчиками 14а, 14b окружающей среды являются такие датчики, которые воспринимают данные окружающей среды на поле, в частности, характеристики, относящиеся к полевой растительности. В особенно предпочтительном примере осуществления по меньшей мере один датчик 14а, 14b окружающей среды является датчиком расстояния, датчиком изображения, датчиком влажности, датчиком температуры и т.п. При этом могут использоваться оптические датчики, в частности, камеры и/или лазерные датчики и/или радиолокационные датчики. В показанном на фиг. 1 примере осуществления датчик 14а окружающей среды является датчиком изображения в виде стереокамеры, а датчик 14b выполнен в виде датчика влажности для генерирования информации об окружающей среде относительно влажности растительности. Имеются другие возможности с помощью других датчиков окружающей среды получать представление о высоте растительности, о ширине полосы растительности, о плотности растительности или подобных характеристиках.
Здесь и предпочтительно центральное устройство 20 обработки данных позволяет генерировать множество данных окружающей среды от данных датчиков окружающей среды. Предпочтительно к ним относятся относящиеся к полевой растительности данные окружающей среды, такие как «плотность растительности», «высота растительности», «состав растительности», «степень зрелости растительности», «данные полеглой растительности», «доля посторонних растений», «доля зеленой массы», «почва под растительностью», «геометрия кромки растительности» и др. Далее, к информации об окружающей среде предпочтительно относятся геометрические данные растительности на поле в определенной зоне 15-18 действия, такие как «наличие препятствий», «топология почвы» и др. И наконец, к ней относятся данные окружающей среды в определенной зоне действия, такие как «запыленность», «температура окружающей среды», «влажность воздуха окружающей среды» и др.
За счет того, что устройство 20 обработки данных связано с множеством датчиков окружающей среды посредством связи передачи данных, может быть предусмотрено, что устройство 20 обработки данных генерирует информацию об окружающей среде из данных окружающей среды по меньшей мере от двух различных датчиков окружающей среды. Так например, может быть предусмотрено, что из данных датчиков окружающей среды устройство 20 обработки данных определяет информацию относительно плотности и высоты растительности, а из нее определяет информацию об объеме убранной массы. Альтернативно или дополнительно может быть предусмотрено, что из данных датчиков окружающей среды устройство 20 обработки данных генерирует информацию относительно плотности, высоты и влажности растительности, а из нее определяет информацию о массе убранного материала.
Предпочтительно при учете процессором 12 зон 15-18 действия данных окружающей среды при определении машинных параметров может обеспечиваться то, что данные окружающей среды используются для управления целенаправленно и своевременно. Предпочтительно зоны 15-18 действия данных окружающей среды записаны или могут записываться в запоминающем устройстве 11.
В частности, для того, чтобы пространственная зона действия информации об окружающей среде могла изменяться по отношению к уборочной машине, предпочтительно, чтобы система 14 датчиков окружающей среды была выполнена с возможностью передачи на систему 10 помощи водителю помимо информации об окружающей среде также информации о пространственной зоне действия информации об окружающей среде. Такая возможность изменения зоны действия может обеспечиваться, например, путем изменения параметризации соответствующего датчика 14а, 14b окружающей среды, такого как изменение положения датчика окружающей среды, выполненного в виде камеры.
На основе данных окружающей среды, которые будут оказывать влияние на процесс уборки только в будущем, процессор 12 с учетом соответствующих зон действия и параметров движения уборочной машины, таких как скорость и траектория движения, может генерировать прогноз преимущественной информации об окружающей среде по меньшей мере, для одной точки времени процесса в будущем. В частности, на основе прогнозируемой информации об окружающей среде и, при необходимости, другой информации для этой точки времени процесса процессор 12 может, в частности, самостоятельно определять машинные параметры и задавать их соответствующему рабочему органу ко времени данной точки процесса или к опережающей точке времени с учетом времени настройки машинного параметра. За счет этого может обеспечиваться настройка машинных параметров точно к заданной точке времени процесса.
Далее будут описаны некоторые примеры результатов работы предлагаемой самоходной уборочной машины, выполненной в виде зерноуборочного комбайна, на примере его молотильного аппарата 1. Как было указано выше, молотильный аппарат 1 может управляться посредством задания ему машинных параметров «число оборотов барабана» и «просвет подбарабанья». Результаты работы уборочной машины являются следствием предлагаемого определения или модификации полей характеристических кривых или наложения на управление полями характеристических кривых контура управления на основе данных окружающей среды.
В первом варианте осуществления изобретения при возрастании данных окружающей среды «доля зеленой массы» и/или «доля посторонних растений» и/или высота растительности» и/или «плотность растительности» процессор 12 делает вывод о повышении нагрузки молотильного аппарата и для снижения этой нагрузки повышает просвет подбарабанья и/или число оборотов молотильного барабана.
Во втором варианте осуществления изобретения при снижении данных окружающей среды «плотность растительности» процессор 12 делает вывод о повышении потерь обмолота и предусматривает для снижения потерь обмолота снижение просвета подбарабанья и/или повышение числа оборотов барабана.
В третьем варианте осуществления изобретения при снижении влажности массы и повышении доли битого зерна процессор понижает число оборотов барабана.
Генерируемые данные окружающей среды могут использоваться с получением преимуществ не только при управлении рабочими органами, но также при управлении приводом хода уборочной машины. Предпочтительно уборочная машина оснащена приводом хода и регулятором 21 хода, причем регулятор 21 хода устанавливает скорость движения уборочной машины в зависимости от данных окружающей среды. Так например, в этом отношении предусмотрено, что регулятор 21 хода в зависимости от объема и/или массы убранного материала устанавливает заданный расход убранной массы. Альтернативно или дополнительно регулятор 21 хода может служить для создания заданной траектории движения, которая выполняется механизмом управления поворотом. За счет этого, например, обеспечивается возможность на основе данных окружающей среды выравнивать траектории движения по кромкам растительности или объезжать препятствия.
Перечень позиций
1 Молотильный аппарат
1а Число оборотов барабана
1b Просвет подбарабанья
2 Жатвенный аппарат
3 Наклонный питатель
4 Молотильный барабан
5 Подбарабанье
6 Сепарирующее устройство
7 Очистное устройство
8 Транспортирующее устройство
9 Зерновой бункер
10 Система содействия водителю
11 Память
11а Стратегия процесса уборки
11b Системная модель
12 Процессор
13 Водитель
14 Система датчиков окружающей среды
14а Камера
14b Датчик влажности
15-18 Зоны действия
19 Система датчиков процесса уборки
19а Датчик зерновой массы
19b Датчик валка
20 Устройство обработки данных
А, В Поля характеристических кривых
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2016 |
|
RU2708025C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2016 |
|
RU2708842C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УБОРОЧНОЙ СЕЛЬХОЗМАШИНОЙ | 2006 |
|
RU2402191C2 |
| CИСТЕМА ПОМОЩИ ДЛЯ ВОДИТЕЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2011 |
|
RU2565225C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2005 |
|
RU2389171C2 |
| СПОСОБ НАСТРОЙКИ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО РАБОЧЕГО ОРГАНА САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ | 2011 |
|
RU2569958C2 |
| СПОСОБ РЕГУЛИРОВКИ РАБОЧЕГО АППАРАТА УБОРОЧНОЙ СЕЛЬХОЗМАШИНЫ | 2006 |
|
RU2406288C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН С СИСТЕМОЙ ПОМОЩИ ВОДИТЕЛЮ | 2015 |
|
RU2685153C2 |
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ САМОХОДНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2013 |
|
RU2643250C2 |
Изобретение относится к сельскохозяйственному машиностроению. Самоходная уборочная машина содержит несколько рабочих органов для обработки принятой с поля убранной массы и систему помощи водителю для управления рабочими органами при помощи датчиков. Система помощи водителю содержит запоминающее устройство для записи данных и процессор для обработки записанных в запоминающем устройстве данных. Предусмотрена система датчиков для восприятия по меньшей мере одной влияющей на процесс уборки информации об окружающей среде с пространственной зоной действия вокруг уборочной машины. В запоминающем устройстве записана функциональная системная модель для по меньшей мере части уборочной машины. Процессор работает на основе системной модели в качестве системы управления полями характеристических кривых и самостоятельно определяет машинные параметры по меньшей мере одного рабочего органа и задает их соответствующему рабочему органу. При определении машинных параметров процессор определяет или модифицирует системную модель в зависимости от по меньшей мере одной информации об окружающей среде и/или при определении машинных параметров. Процессор накладывает на управление полями характеристических кривых контур управления на основе по меньшей мере одной информации об окружающей среде. В самоходной уборочной машине реализована оптимизация управления ее рабочими органами. 14 з.п. ф-лы, 5 ил.
1. Самоходная уборочная машина, в частности зерноуборочный комбайн, содержащая несколько рабочих органов (1, 2, 6, 7) для обработки собранного с поля урожая и систему (10) помощи водителю для управления рабочими органами (1, 2, 6, 7) посредством датчиков, при этом система помощи водителю содержит запоминающее устройство (11) для записи данных и процессор (12) для обработки записанных в запоминающем устройстве (11) данных, при этом предусмотрена система (14) датчиков для восприятия по меньшей мере одной влияющей на процесс уборки информации окружающей среды с пространственных зон (15-18) вокруг уборочной машины,
отличающаяся тем, что
в запоминающем устройстве (11) записана функциональная системная модель (11b) по меньшей мере для части уборочной машины, при этом процессор (12) выполнен с возможностью работы на основе системной модели (11b) управления полями характеристических кривых и, в частности, с возможностью самостоятельного определения машинных параметров по меньшей мере одного рабочего органа (1, 2, 6, 7) и задания их конкретному рабочему органу (1, 2, 6, 7), процессор (12) выполнен с возможностью определения или модифицирования системной модели (11b) в зависимости от по меньшей мере одной информации об окружающей среде, и/или при определении машинных параметров процессор (12) выполнен с возможностью наложения на управление полями характеристических кривых контура управления на основе по меньшей мере одной информации об окружающей среде.
2. Уборочная машина по п. 1, отличающаяся тем, что по меньшей мере один рабочий орган (1, 2, 6, 7) совместно с системой (10) помощи водителю образует по меньшей мере один рабочий автомат, предпочтительно молотильный автомат, посредством того, что в запоминающем устройстве (11) записано множество выбираемых стратегий (11а) процесса уборки, и посредством того, что для реализации выбранной стратегии (11а) процесса уборки процессор (12) выполнен с возможностью самостоятельного определения на основе системной модели (11b) по меньшей мере одного машинного параметра, предпочтительно по меньшей мере одного параметра молотильного аппарата, и задания его рабочему органу (1, 2, 6, 7).
3. Уборочная машина по п. 1 или 2, отличающаяся тем, что процессор (12) выполнен с возможностью циклически определять машинный параметр и задавать его рабочему органу (1, 2, 6, 7), и/или процессор (12) выполнен с возможностью циклически определять или модифицировать системную модель (11b).
4. Уборочная машина по п. 1 или 2, отличающаяся тем, что предусмотрена система (19) датчиков процесса уборки, содержащая несколько датчиков (19а, 19b) процесса уборки для восприятия параметров, являющихся результатом процесса уборки, при этом процессор выполнен с возможностью учета параметров процесса уборки, генерируемых системой (19) датчиков процесса уборки, при определении машинных параметров.
5. Уборочная машина по п. 1 или 2, отличающаяся тем, что система (14) датчиков окружающей среды содержит несколько датчиков (14а, 14b) окружающей среды для генерирования данных датчиков окружающей среды, при этом система (14) датчиков окружающей среды содержит устройство (20) обработки данных, которое выполнено с возможностью генерирования информации об окружающей среде из данных окружающей среды и предоставления ее системе (10) помощи водителю.
6. Уборочная машина по п. 1 или 2, отличающаяся тем, что устройство (20) обработки данных выполнено с возможностью генерирования из данных от датчиков окружающей среды информации об окружающей среде в отношении полевой растительности в соответствующей зоне действия, такой как «плотность растительности», «высота растительности», «состав растительности», «степень зрелости растительности», «данные полеглой растительности», «доля посторонних растений», «доля зеленой массы», «почва под растительностью», «геометрия кромки растительности» и другой, и/или устройство (20) обработки данных выполнено с возможностью генерирования из данных от датчиков окружающей среды информации об окружающей среде в отношении геометрических данных занятого растительностью поля в соответствующей зоне действия, такой как «наличие препятствий», «топология почвы» и другой, и/или устройство обработки данных выполнено с возможностью генерирования из данных от датчиков окружающей среды информации об окружающей среде в отношении окружающей среды поля в соответствующей зоне действия, такой как «запыленность», «температура окружающей среды», «влажность воздуха окружающей среды» и другой.
7. Уборочная машина по п. 1 или 2, отличающаяся тем, что устройство (20) обработки данных выполнено с возможностью генерирования из данных окружающей среды по меньшей мере от двух различных датчиков окружающей среды информации об окружающей среде, при этом предпочтительно устройство (20) обработки данных выполнено с возможностью генерирования из данных от датчиков окружающей среды информации об окружающей среде относительно плотности растительности и высоты растительности и определения из нее информации об объеме убранной массы, и/или устройство (20) обработки данных выполнено с возможностью генерирования из данных от датчиков окружающей среды информации относительно плотности, высоты и влажности растительности и определения из нее информации о массе убранного материала.
8. Уборочная машина по п. 1 или 2, отличающаяся тем, что при определении машинных параметров обеспечен учет процессором (12) зон действия информации об окружающей среде, при этом предпочтительно зоны действия информации об окружающей среде записаны или могут быть записаны в запоминающем устройстве (11).
9. Уборочная машина по п. 1 или 2, отличающаяся тем, что зона действия расположена в передней области, задней области или боковой области от уборочной машины, при этом предпочтительно система (14) датчиков окружающей среды выполнена с возможностью передачи в систему (10) помощи водителю помимо информации об окружающей среде также информации о пространственной зоне (15-18) действия информации об окружающей среде.
10. Уборочная машина по п. 1 или 2, отличающаяся тем, что процессор (12) выполнен с возможностью генерирования из информации об окружающей среде соответствующих относящихся к ней зон (15-18) действия и параметров движения, таких как скорость и траектория движения, прогноза преимущественной информации об окружающей среде уборочной машины по меньшей мере для одной точки времени процесса в будущем, при этом, предпочтительно, для точки времени процесса процессор (12) выполнен с возможностью, в частности, самостоятельного определения по меньшей мере одного машинного параметра на основе прогнозируемой информации об окружающей среде и, при необходимости, другой информации, и задания его соответствующему рабочему органу ко времени данной точки процесса или к опережающей точке времени с учетом времени настройки машинного параметра.
11. Уборочная машина по п. 1, отличающаяся тем, что один рабочий орган (1) выполнен в виде молотильного аппарата с молотильным барабаном (4) и подбарабаньем (5) и выполнен управляемым посредством задания машинных параметров «число оборотов барабана» и «просвет подбарабанья».
12. Уборочная машина по п. 11, отличающаяся тем, что процессор (12) выполнен с возможностью повышения просвета подбарабанья и/или повышения числа оборотов барабана при повышении информации об окружающей среде «доля зеленой массы», и/или «доля посторонних растений», и/или «высота растительности», и/или «плотность растительности» для снижения нагрузки молотильного аппарата.
13. Уборочная машина по п. 11 или 12, отличающаяся тем, что процессор (12) выполнен с возможностью уменьшения просвета подбарабанья и/или повышения числа оборотов барабана при снижении информации об окружающей среде «плотность растительности» для снижения потерь обмолота.
14. Уборочная машина по п. 11 или 12, отличающаяся тем, что процессор (12) выполнен с возможностью снижения числа оборотов молотильного барабана при снижении влажности убранной массы и повышении доли битого зерна.
15. Уборочная машина по п. 11 или 12, отличающаяся тем, что она содержит привод хода и регулятор хода, при этом регулятор хода выполнен с возможностью установления скорости движения уборочной машины в зависимости от информации об окружающей среде, при этом, предпочтительно, регулятор хода выполнен с возможностью настраивания заданного расхода убранной массы в зависимости от объема убранной массы и/или массы убранного материала.
| US 7670218 B2, 02.03.2010 | |||
| СИСТЕМА "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2010 |
|
RU2533922C2 |
| ЗЕРНОУБОРОЧНАЯ МАШИНА, ПРЕИМУЩЕСТВЕННО ЗЕРНОУБОРОЧНЫЙ КОМБАЙН, С МУЛЬТИПРОЦЕССОРНЫМ УПРАВЛЯЮЩИМ УСТРОЙСТВОМ | 1994 |
|
RU2154296C2 |
| US 6128574 A1, 03.10.2000. | |||

