Мобильная антенная установка относится к области средств связи и может быть использована при конструировании мобильных антенных систем.
Известна мобильная антенная установка (см. Патент №2482578, МПК: H01G 1|00, 2006), содержащая зеркальную антенну с рефлектором в форме параболоида вращения. Рефлектор выполнен с вертикальными разъемами с образованием центральной и двух зеркально расположенных по отношению одна к другой периферийных частей. Центральная часть рефлектора жестко закреплена на ОПУ. Каждая из периферийных частей рефлектора с помощью соответствующих петель шарнирно связана с его центральной частью. Складывание рефлектора производится путем поворота его откидных частей с возможностью фиксации их относительно центральной части рефлектора в рабочем и транспортировочном положениях АУ: с помощью откидных болтов, фиксирующих штырей и съемных регулируемых растяжек. Для обслуживания разъемных соединений центральной и периферийных частей рефлектора предусмотрены рабочие площадки, смонтированные на ОПУ.
Недостатком мобильной антенной установки является полностью ручная сборка-разборка зеркала антенны при осуществлении транспортирования или приведения ее в рабочее положение.
Известна мобильная антенная установка радиолокационной станции "Люр" (Богатырев Ю. Направления развития АСУ войсковой ПВО Германии и США, Зарубежное военное обозрение NN 3′, 4′, 5′, 1992, с. 46-47, рис.1). Известное устройство содержит контейнер с аппаратурой, конструктивно совмещенной с антенной системой, которая представляет собой ФАР, установленную на подъемной мачте с гидравлическим приводом. Мачта шарнирно смонтирована на корпусе контейнера. Привод подъема мачты выполнен в виде двух гидроцилиндров поворота, которые расположены снаружи боковых стенок контейнера и шарнирно закреплены на корпусе последнего. Подъемная мачта раскладывается и поднимает ФАР на высоту 12 м. Обзор по азимуту осуществляется механическим вращением ФАР.
К недостаткам мобильной антенной установки следует отнести механическое вращение антенны при обзоре по азимуту и низкую скорость ее развертывания-свертывания за счет использования в системе низкоскоростных гидроприводов. Эти приводы имеют сложную конструкцию, высокую стоимость изготовления и эксплуатации, а также имеют склонность к утечкам рабочего тела и требуют специальных станций питания.
Известно складное антенно-мачтовое устройство (см. А.С. №552658, МКИ: H01Q 1/08), содержащее шарнирно соединенные нижнее и верхнее колена мачты, гидроцилиндры для складывания и развертывания мачты, складную антенну из пружинящих элементов, установленную на верхнем конце мачты, трубу, надетую на верхнее колено мачты и перемещающуюся по ней с целью складывания пружинных элементов антенны при складывании антенно-мачтового устройства.
Недостатками данного устройства являются сложность конструкции и, как и в предыдущем устройстве, низкая скорость развертывания-свертывания антенны за счет использования в системе низкоскоростных гидроприводов.
По совокупности существенных признаков наиболее близким заявленному техническому решению следует считать складное антенно-мачтовое устройство, принятое за прототип (см. Патент №124515, МПК: H01Q 1/12).
Устройство содержит антенну и мачту, установленную на основании с возможностью ее поворота в одной плоскости относительно основания, внутри которой размещен подпружиненный ригель с закрепленной к его концу гибкой тягой, другой конец которой закреплен на неподвижном барабане, установленном соосно оси поворота мачты.
Согласно описанию антенна выполнена параболической с симметричной вырезкой, а другой конец подпружиненного ригеля соединен шарнирно посредством кулисы и рычага с осью поворота упомянутой параболической антенны, совпадающей с фокальной осью параболоида антенны и осью поворота рычага, жестко закрепленного на оси ее поворота и обеспечивающего автоматический разворот антенны на угол 90° вокруг ее фокальной оси.
Однако основными недостатками устройства-прототипа являются следующие:
- неопределенность положения неподвижного барабана и отсутствие элемента конструкции, обеспечивающего одну из главных функций, связанных с разворотом параболической антенны, а следовательно, отсутствует критерий промышленного применения в предложенном варианте конструктивного исполнения устройства,
- отсутствие механизмов быстродействия, т.е. осуществления движений исполнительных механизмов с высокими скоростями и малой погрешностью позиционирования, при развертывании-свертывании системы,
- отсутствие механизма вращения по азимуту на угол ±360° как одного из определяющих и существенных для таких типов АМУ.
Задачей изобретения является создание мобильной антенной установки (МАУ), обеспечивающей выполнение следующих требований:
- исключение операции сборки-разборки отражателя при развертывании-свертывании АМУ и обеспечение требования по вписыванию МАУ в дорожные габариты при транспортировке,
- обеспечение быстродействия при развертывании-свертывании АМУ в автоматическом режиме,
- обеспечение вращения АМУ по азимуту с заданной скоростью на угол 360° в автоматическом режиме,
- снижение трудозатрат и максимальное сокращение вспомогательного времени на приведение в готовность к работе и свертыванию АМУ.
Для решения поставленной задачи предлагается мобильная антенная установка (МАУ), включающая автотранспортное средство, на платформе которого размещено складное АМУ, состоящее из параболической антенны с симметричной вырезкой и мачты, установленной на основании с возможностью ее поворота в одной плоскости относительно основания. Внутри мачты размещен подпружиненный ригель с закрепленной к его концу гибкой тягой, другой конец которой закреплен на неподвижном барабане, установленном соосно оси поворота мачты, при этом другой конец подпружиненного ригеля соединен шарнирно посредством кулисы и рычага с осью поворота упомянутой параболической антенны, совпадающей с ее фокальной осью и осью поворота рычага, жестко закрепленного на оси ее поворота и обеспечивающего автоматический разворот параболической антенны на угол 90° вокруг ее фокальной оси во время подъема и спуска АМУ.
Согласно изобретению МАУ также содержит:
- кронштейн с неподвижным барабаном, на который своим трубчатым основанием, заканчивающимся осью с резьбовым хвостовиком, шарнирно надета мачта, а на барабане закреплен конец упомянутой гибкой тяги,
- исполнительный механизм подъема и спуска АМУ, состоящий из шестеренчатого водила, закрепленного на оси с резьбовым хвостовиком упомянутого трубчатого основания мачты, и электропривода, кинематически связанного с шестеренчатым водилом,
- исполнительный механизм сканирования (вращения) АМУ по азимуту на угол ±360°, содержащий вращающуюся платформу с закрепленным на ней упомянутым кронштейном с неподвижным барабаном, подпятник и центральную ось, а также электропривод, кинематически связанный с вращающейся платформой через ведущую шестерню, закрепленную на центральной оси, при этом между вращающейся платформой и подпятником размещены конические ролики.
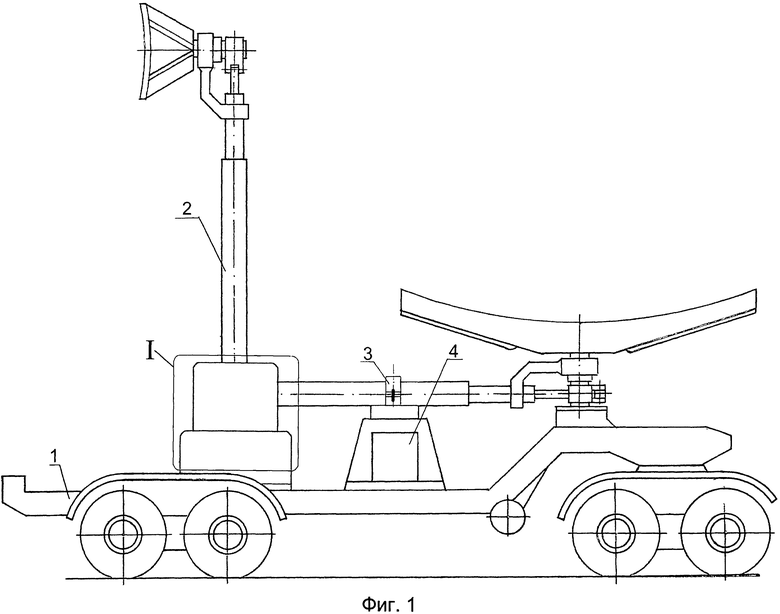
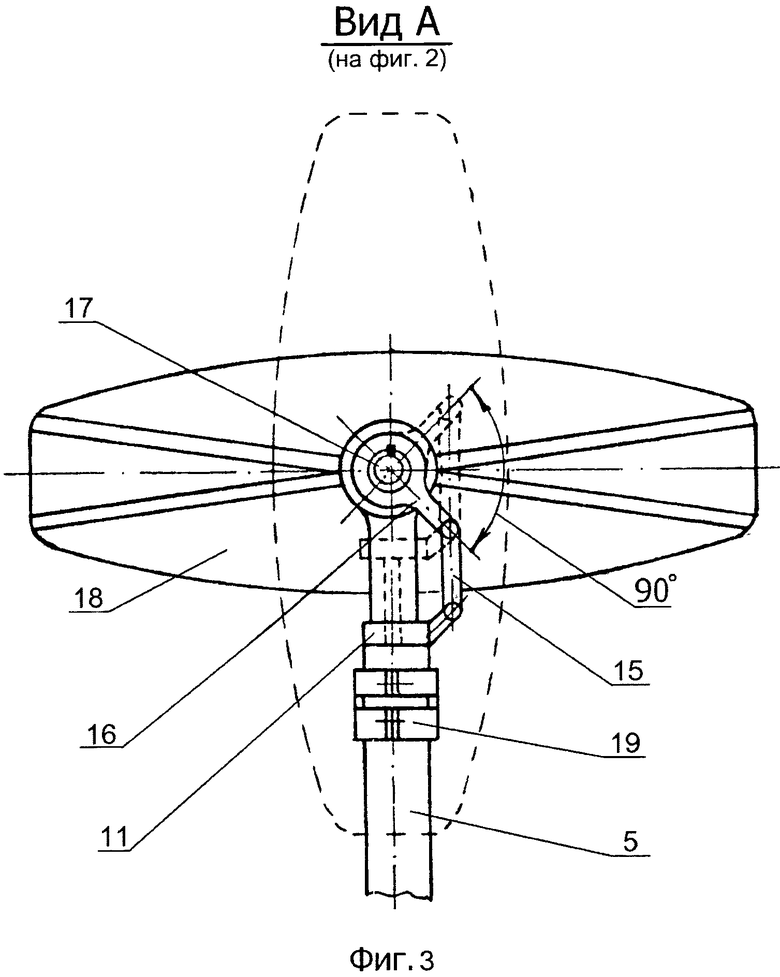
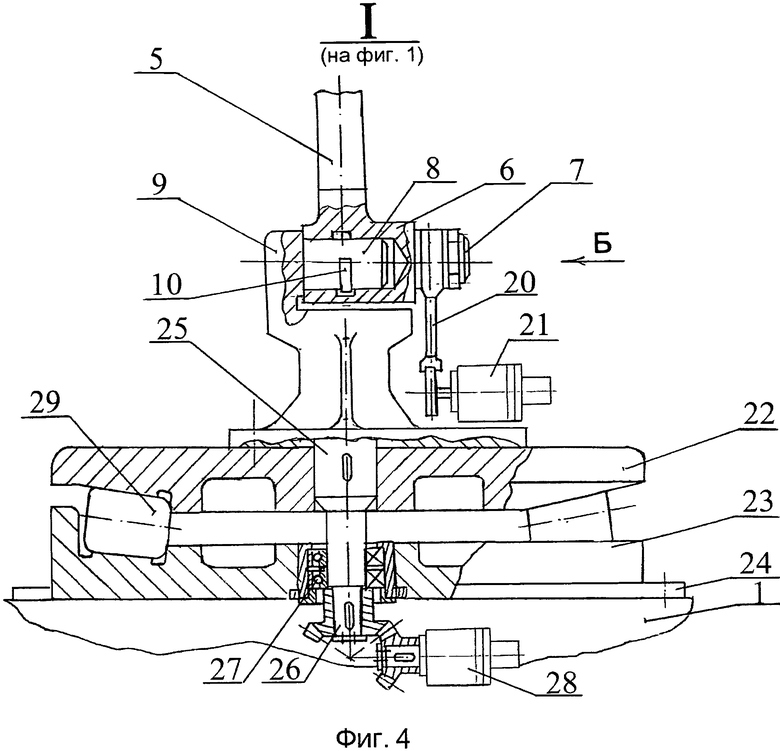
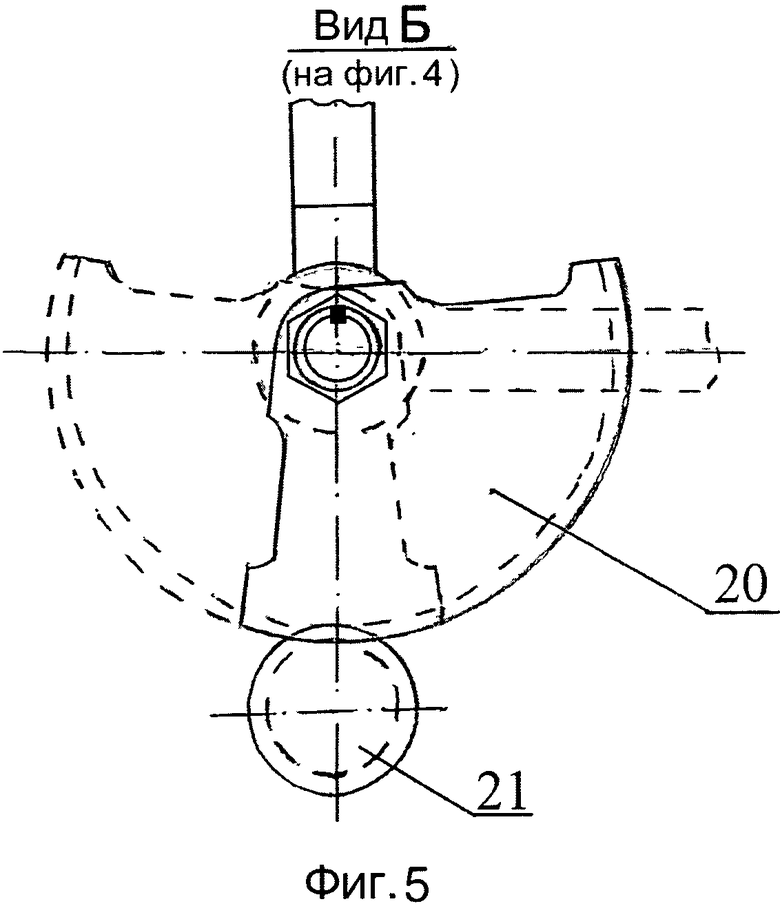
На фиг. 1 показан общий вид МАУ на автотранспортном средстве; на фиг. 2 - складное АМУ; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - выносной элемент I на фиг. 1 (исполнительные механизмы приведения в действие складного АМУ); на фиг. 5 - вид Б на фиг. 4.
МАУ (фиг. 1) содержит автотранспортное средство 1, на платформе которого размещены: складное АМУ 2 в рабочем (вертикальном) и транспортном (горизонтальном) положениях, натяжной кулачковый запор 3 для крепления АМУ 2 в транспортном положении, энергетическая установка 4.
Складное АМУ 2 (фиг. 2-5) содержит мачту 5 с трубчатым основанием 6, заканчивающимся осью с резьбовым хвостовиком 7 (фиг. 4), шарнирно надетую на неподвижный барабан 8 кронштейна 9. Внутри мачты 5 (фиг. 2) проложена гибкая тяга 10, один конец которой закреплен на нижнем конце ригеля 11, взаимодействующего с пружиной 12 и направляющими 13 и 14. Другой конец гибкой тяги 10 закреплен на неподвижном барабане 8 (фиг. 2, 3 и 4). Верхний конец ригеля 11 через кулису 15 шарнирно соединен с рычагом 16, жестко закрепленным на оси 17 параболической антенны 18, совпадающей с ее фокальной осью. Антенна 18 закреплена на мачте 5 с помощью кронштейна 19. На резьбовом хвостовике 7 трубчатого основания 6 мачты 5 (фиг. 4 и 5) закреплено шестеренчатое водило 20 исполнительного механизма подъема и спуска складного АМУ 2, кинематически связанное с электроприводом 21.
Складное АМУ 2 также содержит исполнительный механизм сканирования (вращения) АМУ по азимуту на угол ±360°, состоящий из вращающейся платформы 22 с закрепленным на ней кронштейном 9, подпятника 23 с фланцем 24, центральной оси 25 с ведущей шестернею 26 и подшипниками 27, электропривода 28, кинематически связанного с ведущей шестернею 26 центральной оси 25.
Между вращающейся платформой 22 и подпятником 23 размещены конические ролики 29.
МАУ выполнена как автономно функционирующая автоматическая система с устройством программного управления для исполнительных механизмов, включающая, например, микроконтроллеры семейства AVR фирмы Atmel для программирования на языке C и Ассемблере. (Эти устройства обладают самой эффективной в промышленности архитектурой и развитой периферией - до 86 многофункциональных, двунаправленных GPIO портов ввода-вывода и внутренней флеш-памятью команд до 256 КБ - в зависимости от программно-задаваемой конфигурации регистров).
Электропитание складного АМУ 2 осуществляется от энергетической установки, представляющей, например, литий-ионовый аккумулятор (Li-ion).
Устройство работает следующим образом.
Все действия, связанные с пуском системы на развертывание-свертывание и сканирование АМУ, осуществляются автоматически после включения энергетической установки 4 и запуска заданной программы управления для исполнительных механизмов, например, с помощью тумблера.
Для приведения складного АМУ 2 в рабочее (вертикальное) положение (на фиг. 1 и 2) мачта 5, предварительно освобожденная от натяжного кулачкового запора 3 (фиг. 1), разворачивается на неподвижном барабане 8 до вертикального положения с помощью вращения шестеренчатого водила 20, взаимодействующего с включенным электроприводом 21 (фиг. 4). При этом тяга 10 (фиг. 2), огибая неподвижный барабан 8, укорачивается на πd/4 длины его окружности, где d - диаметр неподвижного барабана 8. Уменьшение длины тяги 10 приведет к втягиванию ригеля 11 в мачту 5 по направляющим 13 и 14, при этом пружина 12 сжимается. Усилие втягивания ригеля 11 передается через кулису 15 (фиг. 2 и 3) на рычаг 16, который при этом развернется вместе с осью 17 и антенной 18 на угол 90°. Большая ось антенны 18 примет горизонтальное положение (фиг. 3).
После приведения складного АМУ 2 в рабочее (вертикальное) положение включается электропривод 28. Взаимодействие его с ведущей шестерней 26, центральной осью 25, и, следовательно, платформой 22 с закрепленным на ней кронштейном 9 создает вращение складного АМУ 2 по азимуту на угол ±360°.
После остановки азимутального вращения для приведения складного АМУ 2 в транспортное положение мачта 5 с помощью реверса вращения шестеренчатого водила 20, взаимодействующего с электроприводом 21 (фиг. 2 и 3), поворачивается на неподвижном барабане 8 до горизонтального положения. При этом тяга 10, огибающая неподвижный барабан 8, разворачиваясь, удлиняется на πd/4 длины его окружности. На эту же длину выдвигается ригель 11. Под действием силы разжатия пружины 12 движение ригеля 11 передается через кулису 15 (фиг. 2 и 3) на рычаг 16, который разворачивает антенну 18 на угол 90°. Большая ось антенны 18 примет вертикальное положение (фиг. 3). Т.е. большая ось антенны 18 окажется параллельной оси транспортного средства. При этом мачта 5 примет горизонтальное положение.
Программа управления для исполнительных механизмов автоматически выключается. Питание энергетической установки 4 выключают. Мачту 5 закрепляют натяжным кулачковым запором 3 (фиг. 1).
АМУ может использоваться как в мобильном, так и в стационарном вариантах. При использовании АУ в стационарных условиях она, как и в мобильном варианте, крепится к горизонтальной площадке с помощью фланца 24 подпятника 23.
При использовании АМУ, в состав которых может входить большой спектр симметричных и несимметричных антенн со сложной конфигурацией, изобретение имеет следующие преимущества по сравнению с прототипом:
- исключается операция сборки-разборки отражателя при развертывании-свертывании АМУ и обеспечивается требование по его вписыванию в дорожные габариты при транспортировке за счет автоматического разворота параболической антенны вокруг своей фокальной оси на угол 90°,
- обеспечиваются высокая степень быстродействия, т.е. высокая скорость приведения в готовность к работе (не более 25-30 секунд) за счет применения в составе исполнительных механизмов электроприводов, преимуществами которых по сравнению с гидроприводами являются высокая надежность, экономичность, КПД, удобство сборки и хорошие регулировочные свойства; кроме того, электроприводы обладают точностью позиционирования, достигающего значений до ±0,05 мм, в то время как погрешность позиционирования гидроприводов составляет ±0,5 мм,
- конструкция исполнительного механизма подъема и спуска АМУ обеспечивает быстрое его развертывание, или свертывание в автоматическом режиме,
конструкция исполнительного механизма сканирования АМУ обеспечивает его вращение по азимуту с заданной скоростью на угол ±360° в автоматическом режиме,
- низкие трудозатраты и максимальное сокращение вспомогательного времени на приведение в готовность к работе и свертыванию АМУ.
Сравнение заявленной мобильной антенной установки с прототипом показал, что вся совокупность существенных признаков необходима и достаточна для решения поставленной задачи, т.е. для получения положительного эффекта. Следовательно, объект изобретения соответствует критерию «новизна».
По данной заявке изготовлен действующий опытный образец в масштабе 1:16.
Испытания дали положительные результаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2012 |
|
RU2482578C1 |
| Складное антенно-мачтовое устройство | 1983 |
|
SU1164810A1 |
| АНТЕННО-МАЧТОВОЕ УСТРОЙСТВО ДЛЯ РАДИОРЕЛЕЙНОЙ СТАНЦИИ | 2012 |
|
RU2488203C1 |
| Мобильная радиолокационная станция | 2017 |
|
RU2662447C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 1997 |
|
RU2115977C1 |
| МОБИЛЬНОЕ АНТЕННОЕ УСТРОЙСТВО | 2011 |
|
RU2444097C1 |
| Автоматическое антенно-мачтовое устройство с механизмами подъема | 2023 |
|
RU2813629C1 |
| МОБИЛЬНАЯ ВЫШКА ПРЕИМУЩЕСТВЕННО ДЛЯ АНТЕННЫХ СИСТЕМ | 2011 |
|
RU2469445C1 |
| Автоматическое антенно-мачтовое устройство с несимметричной и симметричными антеннами | 2023 |
|
RU2813238C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2019 |
|
RU2737921C1 |
Использование: в области средств связи и может быть использовано при конструировании мобильных антенных систем. Сущность: мобильная антенная установка (МАУ), включающая автотранспортное средство, на платформе которого размещено складное АМУ, состоящее из параболической антенны с симметричной вырезкой и мачты. Согласно изобретению МАУ содержит исполнительный механизм разворота параболической антенны на угол ±90°, исполнительный механизм подъема и спуска АМУ при развертывании-свертывании, исполнительный механизм сканирования (вращения) АМУ по азимуту на угол ±360°. МАУ выполнена как автономно функционирующая автоматическая система с устройством программного управления для исполнительных механизмов, с электропитанием от энергетической установки. Технический результат: повышение быстродействия, обеспечение вращения АМУ по азимуту с заданной скоростью на угол ±360°. 5 ил.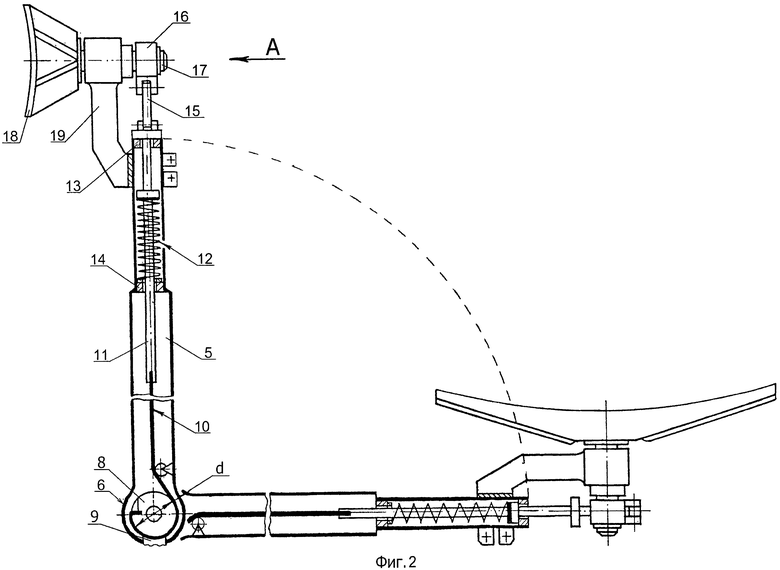
Мобильная антенная установка, включающая автотранспортное средство, на платформе которого размещено складное антенно-мачтовое устройство, состоящее из параболической антенны с симметричной вырезкой и мачты, установленной на основании с возможностью ее поворота в одной плоскости относительно основания, внутри которой размещен подпружиненный ригель с закрепленной к его концу гибкой тягой, другой конец которой закреплен на неподвижном барабане, установленном соосно оси поворота мачты, при этом другой конец подпружиненного ригеля соединен шарнирно посредством кулисы и рычага с осью поворота упомянутой параболической антенны, совпадающей с ее фокальной осью и осью поворота рычага, жестко закрепленного на оси ее поворота и обеспечивающего автоматический разворот параболической антенны на угол 90° вокруг ее фокальной оси во время подъема и спуска антенно-мачтового устройства, отличающаяся тем, что мобильная антенная установка дополнительно содержит кронштейн с неподвижным барабаном, на который своим трубчатым основанием, заканчивающимся осью с резьбовым хвостовиком, шарнирно надета мачта, а на барабане закреплен конец упомянутой гибкой тяги, исполнительный механизм подъема и спуска антенно-мачтового устройства, состоящий из шестеренчатого водила, закрепленного на оси с резьбовым хвостовиком упомянутого трубчатого основания мачты, и электропривода, кинематически связанного с шестеренчатым водилом, а также исполнительный механизм сканирования (вращения) антенно-мачтового устройства по азимуту на угол ±360°, содержащий вращающуюся платформу с закрепленным на ней упомянутым кронштейном с неподвижным барабаном, подпятник и центральную ось, а также электропривод, кинематически связанный с вращающейся платформой через ведущую шестерню, закрепленную на центральной оси, при этом между вращающейся платформой и подпятником размещены конические ролики, а сама мобильная антенная установка выполнена как автономно функционирующая автоматическая система с устройством программного управления для исполнительных механизмов.
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2001 |
|
RU2200359C1 |

