Изобретение относится к радиолокации и может быть использовано в мобильных радиолокационных станциях (РЛС) для контроля воздушного пространства, например, обнаружения, измерения координат, опознавания, сопровождения и распознавания целей, а также при модернизации РЛС.
Известна тактическая трехкоординатная мобильная РЛС кругового обзора большой дальности, типа S 753 Martello (Великобритания) (RadarSystemForecast, lstQuarter, 2003).
Известная РЛС может размещаться на неподготовленной позиции, имеет встроенное оборудование для подъема и перемещения грузов, перевозится крупными частями (контейнеры, фрагменты ФАР, антенна системы госопознавания, ОПУ) на любых стандартных дорожных трейлерах, загрузка и разгрузка которых осуществляется стандартной механической лебедкой.
Недостатком РЛС является низкая мобильность, связанная с ее перевозкой в разобранном виде на нескольких транспортных средствах, что приводит к затратам дополнительного времени на разборку и сборку ФАР, погрузку и разгрузку перевозимых частей РЛС, их электрический демонтаж и последующий монтаж.
Известна мобильная РЛС кругового обзора метрового диапазона (патент на полезную модель №63943, класс МПК:G01S 7/00).
Повышение мобильности РЛС и сокращение численности боевого расчета в полезной модели достигается тем, что в конструкцию антенны введены шарнирные и (или) телескопические соединения между ее элементами и их частями, антенна свертывается и компактно укладывается по периферии транспортного средства без демонтажа. Остальная аппаратура размещается на освободившейся части этого транспортного средства, т.о. РЛС в полном составе может размещаться на одном транспортном средстве, и в боевых условиях появляется практическая возможность быстрой передислокации РЛС.
Недостатком полезной модели является недостаточная мобильность, из-за необходимости ручных операций для развертывания и свертывания, укладки и фиксации в транспортном или рабочем положении.
Известна мобильная станция кругового обзора метрового диапазона волн (Евразийский патент №007941 МПК G01S 13/04, опубл. 27.02.2007). В этой станции сокращение временных затрат на свертывание и развертывание и повышение мобильности достигается благодаря введению устройства развертывания и свертывания, единому конструктивному решению антенно-мачтового устройства с различными типами, установленных на нем антенн, и размещению на одном транспортном средстве. Устройство развертывания и свертывания представляет собой автоматизированную гидравлическую систему с механическими элементами, обеспечивающую складывание (раскладывание) основной антенны, компенсационной антенны, антенны НТЗ, опускание (подъем) и укладку антенно-мачтового устройства АМУ на платформу транспортного средства и ее горизонтирование при развертывании РЛС. При этом сокращенное число режимов и органов управления развертыванием создает удобство работы и не требует высокой квалификации оператора.
В известной станции для обеспечения питания, как силовых, так и управляющих устройств, используемых для развертывания и горизонтирования, необходимо подключение первичного питания изделия, запуск дизеля, или ближайшей трехфазной сети, что требует дополнительного времени и соответственно снижает мобильность РЛС.
Кроме того, автоматизированная система развертывания и свертывания подразумевает применение большого количества концевых выключателей - датчиков положения антенн, состояния стопоров и других элементов, что снижает надежность указанной станции, так как возрастает вероятность несрабатывания одного из концевых выключателей в условиях ее эксплуатации.
Наиболее близкой по технической сущности и назначению является принятая за прототип мобильная трехкоординатная РЛС дециметрового диапазона (патент РФ №2394253, класс МПК:G01S 13/00, опубл. 10.07.2010).
Известная РЛС содержит антенно-мачтовое устройство, в которое входит фазированная антенная решетка (ФАР), переключатель положения луча на передачу в угломестной плоскости, устройство ориентирования и топопривязки, передающее устройство, устройство обработки и управления, аппаратуру системы госопознования, опорно-поворотное устройство, устройство развертывания и свертывания, транспортное средство, на платформе которого размещены как в рабочем, так и в транспортном состоянии все входящие в РЛС устройства.
Повышение мобильности известной РЛС достигнуто за счет размещения всех составных частей РЛС (кроме первичного источника электропитания) на едином транспортном средстве, что исключило разборку (сборку), погрузку (разгрузку) и электрические отключения (подключения) составных частей между собой, а также благодаря введению устройства развертывания и свертывания (УРС), что позволило сократить время свертывания и развертывания антенно-мачтового устройства АМУ и ФАР, а также время горизонтирования платформы транспортного средства.
Однако при прибытии на позицию перед развертыванием требуются дополнительные затраты времени для подключения первичного питания станции, для чего необходимо запустить электроагрегат, который может располагаться на другом транспортном средстве, развернуть силовые кабели и подключить их к выходам электроагрегата, либо к выходам промышленной сети, при необходимости установить защитное заземление, что снижает мобильность известной РЛС.
Кроме того, высокое быстродействие может быть достигнуто только в автоматическом режиме, а следовательно, требует введения датчиков обратной связи и быстродействующего устройства программного управления. При большом количестве разворачиваемых устройств, для их фиксации в походном или рабочем положении требуется значительное количество датчиков положения и датчиков состояния стопоров, а также цепей для их подключения. Например, для надежной фиксации мачты антенно-мачтового устройства может потребоваться три стопора, по два датчика состояния на каждом и минимум два датчика положения мачты. То же относится к стопорам колонки опорно-поворотного устройства, антенно-фидерной системы, отражателя и к датчикам других устройств. Общее количество датчиков может составить два-три десятка, что повышает вероятность отказа и снижает надежность работы в автоматическом режиме развертывания и свертывания, особенно с учетом механических и климатических воздействий, характерных для мобильных РЛС.
Техническим результатом предлагаемого изобретения является повышение мобильности за счет уменьшения времени развертывания и свертывания, упрощение работ и повышение надежности за счет локализации отказов и нахождения неисправности непосредственно в процессе развертывания и свертывания.
Технический результат достигается тем, что в мобильную РЛС, включающую транспортное средство (ТС), опорно-поворотное устройство (ОПУ), установленное на транспортном средстве, колонку антенную (КА) с аппаратурой приема, передачи и обработки данных, установленную на ОПУ, антенно-фидерную систему (АФС), механически связанную с КА, систему наведения по углу места (CHε), механически связанную с КА и АФС, систему наведения по азимуту (СНβ), механически связанную с ОПУ, систему электропитания (СЭП), автоматизированное рабочее место (АРМ), антенно-мачтовое устройство (АМУ) с антеннами связи (АС) и передачи данных (АПД), аппаратуру системы горизонтирования (АСГ), аппаратуру развертывания-свертывания (АРС), с гидромеханическими исполнительными устройствами, обеспечивающими складывание (раскладывание) и фиксацию антенн, опускание (подъем) и укладку АМУ на платформе транспортного средства, разворачивание опорно-поворотного устройства, откидных площадок (ОП), устройства ограждения (УО), при этом входящие в РЛС устройства, как в рабочем, так и в транспортном состоянии, размещены на платформе транспортного средства, согласно изобретению, в РЛС дополнительно введены коммутатор и гидронасос, транспортное средство дополнительно включает установку отбора мощности, а бортовой аккумулятор используется в качестве альтернативного источника питания, аппаратура развертывания-свертывания включает датчики положения и состояния, устройство анализа и управления, пульт управления и индикации, исполнительные устройства, при этом датчики положения и состояния механически связаны с соответствующими разворачиваемыми устройствами (ОПУ, АМУ, АС, АПД, УО, ОП) и элементами их фиксации, а выходные цепи датчиков электрически соединены с первыми входами устройства анализа и управления, первые выходы которого подключены к входам исполнительных устройств, а вторые выходы соединены с входом пульта управления и индикации, выходы которого подключены ко вторым входам устройства анализа и управления, первый и второй выходы автоматизированного рабочего места подключены соответственно к входам системы наведения по азимуту и системы наведения по углу места, при этом вал установки отбора мощности транспортного средства механически связан с валом гидронасоса, а выход борт сети системы электропитания подключен к первому входу коммутатора, второй вход которого подключен к выходу бортового аккумулятора транспортного средства, а выход - к входам питания датчиков положения и состояния, устройства анализа и управления, аппаратуры развертывания-свертывания, системы наведения по азимуту, системы наведения по углу места и аппаратуры системы горизонтирования.
При этом аппаратура системы горизонтирования выполнена автономно, снабжена органами управления, датчиками и исполнительными устройствами, работающими от гидросистемы.
Введение коммутатора позволяет управлять подключением станции к системе электропитания СЭП или к бортовому аккумулятору.
Использование бортового аккумулятора БА позволяет через коммутатор включить устройства станции сразу при прибытии на позицию, когда еще не подключена система электропитания СЭП, что повышает ее мобильность.
Устройство анализа и управления обеспечивает автоматизированное программное управление исполнительными устройствами, что даже при значительном числе датчиков позволяет не только максимально уменьшить время выполнения операций развертывания и свертывания, но и упростить работу оператора за счет сокращения органов управления.
Введение устройства анализа и управления позволяет также провести анализ возможного отказа или аварии, определить неисправность конкретного датчика и, непосредственно в процессе работы, устранить указанную неисправность, что повышает надежность РЛС.
На индикаторах пульта управления и индикации отображается состояние развертываемых устройств, а в нештатных или аварийных ситуациях обеспечивается индикация неисправности с точностью до конкретного датчика.
В условиях эксплуатации мобильных РЛС наиболее вероятно, что неисправность датчика имеет характер отказа, а не аварии, например, в случае попадания влаги, снега или грязи в зазор индуктивного бесконтактного выключателя, изменения расстояния срабатывания, например, вследствие случайной деформации или заклинивания подвижного объекта, воздействующего на выключатель и т.д. В этом случае, зная расположение несработавшего датчика, можно оперативно устранить неисправность даже в полевых условиях.
В результате поиска не обнаружено информации, позволяющей сделать вывод об известности отличительных признаков заявляемого устройства, следовательно, заявляемое техническое решение соответствует условию новизны.
Из предшествующего уровня техники не известно влияние отличительных признаков заявляемого устройства на достигаемый технический результат, следовательно, заявляемое устройство соответствует условию изобретательского уровня.
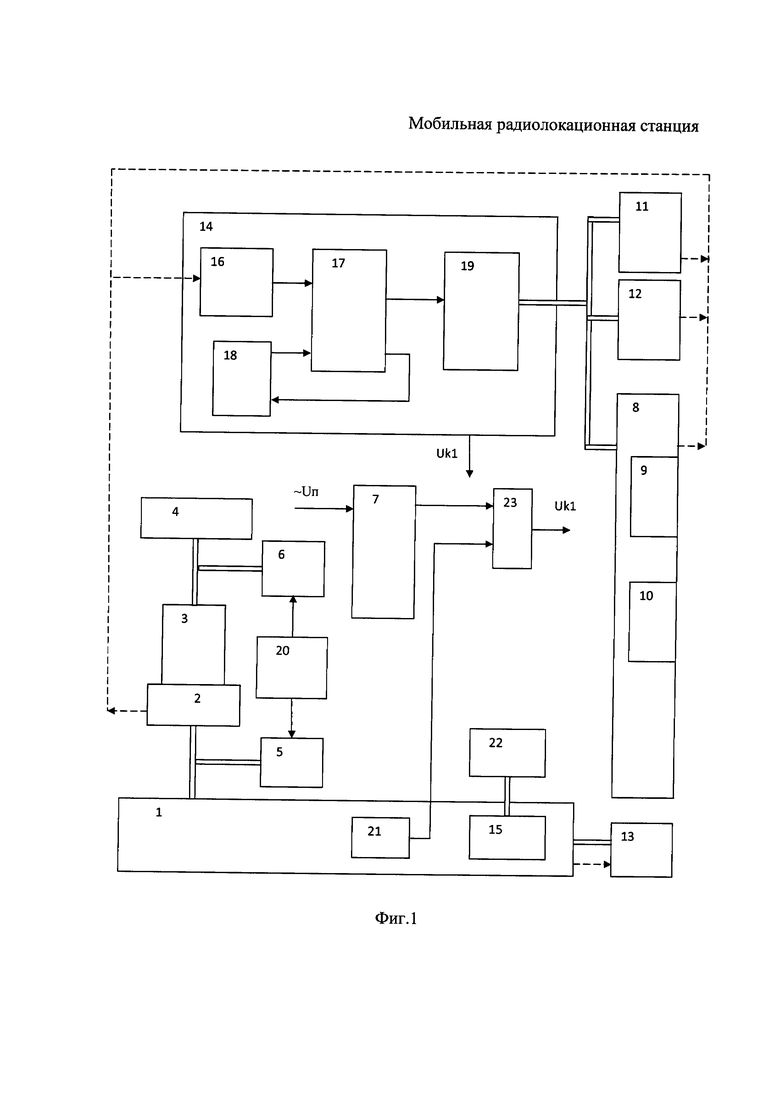
Сущность изобретения поясняется чертежом, где на фиг. 1 представлена структурная схема предлагаемого устройства, где обозначены
1 - транспортное средство (ТС);
2 - опорно-поворотное устройство (ОПУ);
3 - колонка антенная (КА);
4 - антенно-фидерная система (АФС);
5 - система наведения по азимуту (СНβ);
6 - система наведения по углу места (СНε);
7 - система электропитания (СЭП);
8 - антенно-мачтовое устройство (АМУ);
9 - антенна связи (АС);
10 - антенна передачи данных (АПД);
11 - устройство ограждения (УО);
12 - откидные площадки (ОП);
13 - аппаратура системы горизонтирования (АСГ);
14 - аппаратура развертывания-свертывания (АРС);
15 - установка отбора мощности (УОМ);
16 - датчики положения и состояния (ДПС);
17 - устройство анализа и управления (УАУ);
18 - пульт управления и индикации (ПУИ);
19 - исполнительные устройства (ИУ);
20 - автоматизированное рабочее место (АРМ);
21 - бортовой аккумулятор (БА);
22 - гидронасос гидросистемы;
23 - коммутатор (К).
Все входящие в РЛС устройства, как в рабочем, так и в транспортном состоянии, размещены на платформе транспортного средства.
Транспортное средство (ТС) 1 выполнено на автомобильном или ином шасси, содержащем установку отбора мощности (УОМ) 15, и бортовой аккумулятор 21.
Опорно-поворотное устройство (ОПУ) 2 установлено на транспортном средстве и содержит редуктор, механически связанный с исполнительным двигателем системы наведения по азимуту (СНβ) 5.
Колонка антенная (КА) 3 установлена на ОПУ 2 и содержит аппаратуру приема, передачи и обработки данных.
Антенно-фидерная система (АФС) 4 механически связана с КА 3 и выходом системы наведения по углу места (СНε) 6 и может быть выполнена на основе ФАР, либо в виде узконаправленной антенны с облучателем и параболическим отражателем.
Система наведения по азимуту (СНβ) 5 имеет в своем составе цифровой датчик углового положения, блок управления, усилительно-преобразовательное устройство и исполнительный электродвигатель. Система наведения по углу места (СНε) 6 может быть выполнена аналогично, либо с применением гидравлических исполнительных механизмов.
Система электропитания (СЭП) 7 в штатных режимах работы станции обеспечивает напряжение переменного тока для питания силовых устройств, электромоторов, вентиляторов, кондиционеров и т.д., а также напряжение борт сети постоянного тока, для питания вторичных источников питания блоков и других устройств станции.
Коммутатор (К)23 выполнен на основе контактора с управлением от напряжения борт сети. При включенной станции напряжение борт сети присутствует, и коммутатор 23 обеспечивает работу станции от СЭП 7 в штатном режиме. При выключенной станции напряжение борт сети отсутствует, и на выход коммутатора 23 поступает напряжение от бортового аккумулятора 21 транспортного средства ТС 1. Отбор мощности для питания гидронасоса 22 осуществляться через УОМ 15 от вала двигателя. При этом все блоки и устройства РЛС, задействованные в режиме развертывания, выполнены таким образом, чтобы обеспечивалась работа как от напряжения бортсети 27 В, так и от напряжения бортового аккумулятора 24 В. В частности, например, модули питания типа СПН27 могут работать в диапазоне входных напряжений от 17 до 36 В.
Аппаратура развертывания свертывания (АРС) 14 представляет собой автоматизированную систему управления гидравлическими механизмами подъема, опускания и фиксации разворачиваемых устройств и включает датчики положения и состояния (ДПС) 16, устройство анализа и управления (УАУ) 17, исполнительные устройства (ИУ) 19, пульт управления и индикации (ПУИ) 18.
Датчики положения и состояния (ДПС) 16 механически связаны с соответствующими разворачиваемыми устройствами и могут быть выполнены, например, на основе выключателя индуктивного бесконтактного ВТИЮ. 1246.1.
Пульт управления и индикации (ПУИ) 18 содержит тумблеры, обеспечивающие формирование команд на развертывание, свертывание, контроль, а также индикаторы, отображающие информацию текущего режима и результаты автоконтроля. Тумблеры и индикаторы ПУИ 18 на схеме не показаны.
Устройство анализа и управления (УАУ) 17 выполнено на основе микроконтроллера и обеспечивает анализ сигналов датчиков 16 и программное управление исполнительными устройствами 19 по командам с ПУИ 18, а также выдачу информации текущего режима и результаты автоконтроля на индикаторы ПУИ 18.
Исполнительные устройства (ИУ) 19 могут быть выполнены, например, на основе гидравлических механизмов с пропорциональным или релейным управлением. Давление в гидросистеме при развертывании и свертывании без подключения первичного питания станции обеспечивается гидронасосом 22. В штатном режиме может быть подключен насос с электродвигателем, например на основе трехфазного асинхронного двигателя, питающегося от СЭП 7 (на схеме не приведены). ИУ обеспечивают складывание (раскладывание) и фиксацию антенн, опускание (подъем) и укладку АМУ на платформе транспортного средства, разворачивание опорно-поворотного устройства, откидных площадок (ОП), устройства ограждения (УО),
Антенно-мачтовое устройство (АМУ) 8 конструктивно размещено на шасси транспортного средства ТС 1 и содержит мачту, антенну связи (АС) 9 и антенну передачи данных (АПД) 10, а также может содержать другие функциональные устройства, которые приводятся в рабочее положение при развертывании станции.
Устройство ограждения (УО) 11 и откидные площадки (ОП) 12 обеспечивают блокировку аварийных режимов, безопасность и удобство персонала при настройке.
Гидронасос 22 выполнен на базе гидромотора, подключенного непосредственно к выходному валу установки отбора мощности 15 транспортного средства 1.
Аппаратура системы горизонтирования (АСГ) 13 выполнена автономно, имеет свой пульт управления, датчики и исполнительные устройства, работающие от той же гидросистемы.
Автоматизированное рабочее место (АРМ) 20 представляет собой пульт оператора на основе ПЭВМ. АРМ 20 осуществляет управление системами станции в штатном режиме работы.
Выходные цепи датчиков положения и состояния (ДПС) 16 соединены с первыми входами устройства анализа и управления 17, первые выходы которого подключены к входам исполнительных устройств 19, а вторые выходы - к входам пульта управления и индикации 18, выходы которого подключены ко вторым входам устройства анализа и управления 17. Вал установки отбора мощности 15 транспортного средства 1 механически связан с валом гидронасоса 22. Выход борт сети системы электропитания (СЭП) 7 подключен к первому входу коммутатора 23, второй вход которого подключен к выходу бортового аккумулятора 21 транспортного средства 1, а выход - к входам питания устройств аппаратуры развертывания-свертывания 14, системы наведения по азимуту 5, системы наведения по углу места 6 и аппаратуры системы горизонтирования 13. Первый и второй выходы автоматизированного рабочего места 20 подключены соответственно к входам системы наведения по азимуту 5 и системы наведения по углу места 6.
РЛС работает следующим образом.
При прибытии на позицию первичное питание станции ~Uп не подключено и напряжение борт сети отсутствует. Напряжение бортового аккумулятора БА 21 через коммутатор 23 поступает на входы питания блоков и устройств, необходимых для работы в режиме развертывания. При включении режима отбора мощности транспортного средства 1 включается гидронасос 22, подсоединенный к валу УОМ 15, и обеспечивает необходимое давление в гидросистеме. Датчики положения и состояния 16, механически связанные с разворачиваемыми устройствами (ОПУ 2, АМУ 8, АС 9, АПД 10, УО 11, ОП 12), и элементами их фиксации, обеспечивают выдачу в микроконтроллер УАУ 17 необходимой информации о текущем положении указанных устройств и состоянии стопоров.
На индикаторах ПУИ 18 индицируется походное положение мачты АМУ 8, антенн связи 9, антенн передачи данных 10, и других устройств, не входящих в АМУ 8 (УО 11, ОП 12, КА 3 с ОПУ 2), а также состояние стопоров, фиксирующих указанные устройства. При включении тумблера РАЗВЕРТ., пульта управления и индикации 18, устройство анализа и управления 17 начинает выполнение программы развертывания, записанной в памяти микроконтроллера. УАУ 17 формирует соответствующие сигналы управления для исполнительных устройств 19, гидромеханизмы которых обеспечивают последовательное отпирание стопоров, подъем мачты АМУ 8, развертывание антенн и других устройств. Последовательное выполнение операций также отображается на индикаторах пульта 18. Развертывание заканчивается фиксацией указанных устройств в рабочем положении.
Аналогично, в обратном порядке, выполняется программа свертывания при включении тумблера СВЕРТ. пульта 18. В процессе работы УАУ 17 анализирует работу программы и при нарушении последовательности выполнения операций, временных характеристик, правильности срабатывания датчиков или иных отказов работа программы останавливается. Если при этом будет включен тумблер КОНТРОЛЬ пульта 18, то индицируется информация о неисправности, например, номер неисправного или несработавшего датчика.
Таким образом, станция готова к развертыванию сразу, как только включен тумблер установки отбора мощности 15 транспортного средства 1 и подключен бортовой аккумулятор 21.
Операции развертывания, свертывания и горизонтирования можно производить, также, при включенной станции, в этом случае устройства станции через коммутатор 23 подключены к борт сети СЭП 7. При свертывании из рабочего режима станции по сигналу оператора, поступающему из АРМ 20 на входы системы наведения по азимуту 5 и системы наведения по углу места 6, предварительно производится автоматическая установка в транспортное положение по азимуту опорно-поворотного устройства 2 с колонкой антенной 3 и антенно-фидерной системы 4 по углу места, что позволяет упростить и ускорить работы по свертыванию. После поступления на входы УАУ 17 сигналов датчиков походного положения ОПУ 2 и АФС 4 разрешается их фиксация и дальнейшее свертывание.
Преимуществом предлагаемой мобильной радиолокационной станции является повышение мобильности за счет уменьшения времени развертывания и свертывания, упрощение работ и повышение надежности за счет контроля за работой РЛС в указанных режимах и индикации места неисправности непосредственно в процессе развертывания и свертывания.
Аппаратура системы горизонтирования (АСГ) при развертывании также питается от УОМ и БО, но имеет свой пульт. Если отсутствуют конструктивные ограничения и выполняются требования техники безопасности, это позволяет производить горизонтирование одновременно с развертыванием АМУ и, таким образом, дополнительно сократить общее время развертывания станции.
Дополнительным преимуществом является, также, возможность программной доработки с целью применения в аналогичных изделиях с другой номенклатурой разворачиваемых устройств и другим порядком их развертывания.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РЛС ДЕЦИМЕТРОВОГО ДИАПАЗОНА | 2008 |
|
RU2394253C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2594285C2 |
| МОБИЛЬНОЕ АНТЕННОЕ УСТРОЙСТВО | 2011 |
|
RU2444097C1 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2019 |
|
RU2737921C1 |
| ВЫШКА СБОРНО-РАЗБОРНОЙ КОНСТРУКЦИИ ДЛЯ АНТЕННЫХ СИСТЕМ | 2010 |
|
RU2428551C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2014 |
|
RU2567180C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2019 |
|
RU2742130C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2017 |
|
RU2694711C1 |
Изобретение относится к радиолокации и может быть использовано в мобильных радиолокационных станциях (РЛС) для контроля воздушного пространства, например, обнаружения, измерения координат, опознавания, сопровождения и распознавания целей, а также при модернизации РЛС. Достигаемый технический результат - повышение мобильности за счет уменьшения времени развертывания и свертывания, упрощение работ и повышение надежности за счет локализации отказов и нахождения неисправности непосредственно в процессе развертывания и свертывания. Указанный результат достигается за счет того, что мобильная РЛС включает транспортное средство, опорно-поворотное устройство (ОПУ), установленное на транспортном средстве, колонку антенную (КА) с аппаратурой приема, передачи и обработки данных, установленную на ОПУ, антенно-фидерную систему (АФС), механически связанную с КА, систему наведения по углу места, механически связанную с КА и АФС, систему наведения по азимуту, механически связанную с ОПУ, систему электропитания, автоматизированное рабочее место, антенно-мачтовое устройство (АМУ) с антеннами связи и передачи данных, аппаратуру системы горизонтирования, аппаратуру развертывания-свертывания с гидромеханическими исполнительными устройствами, обеспечивающими складывание (раскладывание) и фиксацию антенн, опускание (подъем) и укладку АМУ на платформе транспортного средства, разворачивание опорно-поворотного устройства, откидных площадок, устройства ограждения, коммутатор и гидронасос, при этом входящие в РЛС устройства, как в рабочем, так и в транспортном состоянии, размещены на платформе транспортного средства. Транспортное средство дополнительно включает установку отбора мощности. Бортовой аккумулятор используется в качестве альтернативного источника питания. Аппаратура развертывания-свертывания включает датчики положения и состояния, устройство анализа и управления, пульт управления и индикации, исполнительные устройства. 1 з.п. ф-лы, 1 ил.
1. Мобильная радиолокационная станция (РЛС), включающая транспортное средство (ТС), опорно-поворотное устройство (ОПУ), установленное на транспортном средстве, колонку антенную (КА) с аппаратурой приема, передачи и обработки данных, установленную на ОПУ, антенно-фидерную систему (АФС), механически связанную с КА, систему наведения по углу места (CHε), механически связанную с КА и АФС, систему наведения по азимуту (CHβ), механически связанную с ОПУ, систему электропитания (СЭП), автоматизированное рабочее место (АРМ), антенно-мачтовое устройство (АМУ) с антеннами связи (АС) и передачи данных (АПД), аппаратуру системы горизонтирования (АСГ), аппаратуру развертывания-свертывания (АРС), с гидромеханическими исполнительными устройствами, обеспечивающими складывание (раскладывание) и фиксацию антенн, опускание (подъем) и укладку АМУ на платформе транспортного средства, разворачивание опорно-поворотного устройства, откидных площадок (ОП), устройства ограждения (УО), при этом входящие в РЛС устройства, как в рабочем, так и в транспортном состоянии, размещены на платформе транспортного средства, отличающаяся тем, что в РЛС дополнительно введены коммутатор и гидронасос, транспортное средство дополнительно включает установку отбора мощности, а бортовой аккумулятор используется в качестве альтернативного источника питания, аппаратура развертывания-свертывания включает датчики положения и состояния, устройство анализа и управления, пульт управления и индикации, исполнительные устройства, при этом датчики положения и состояния механически связаны с соответствующими разворачиваемыми устройствами (ОПУ, АМУ, АС, АПД, УО, ОП) и элементами их фиксации, а выходные цепи датчиков электрически соединены с первыми входами устройства анализа и управления, первые выходы которого подключены к входам исполнительных устройств, а вторые выходы соединены с входом пульта управления и индикации, выходы которого подключены ко вторым входам устройства анализа и управления, первый и второй выходы автоматизированного рабочего места подключены соответственно к входам системы наведения по азимуту и системы наведения по углу места, при этом вал установки отбора мощности транспортного средства механически связан с валом гидронасоса, а выход борт сети системы электропитания подключен к первому входу коммутатора, второй вход которого подключен к выходу бортового аккумулятора транспортного средства, а выход - к входам питания датчиков положения и состояния, устройства анализа и управления, аппаратуры развертывания-свертывания, системы наведения по азимуту, системы наведения по углу места и аппаратуры системы горизонтирования.
2. Мобильная радиолокационная станция по п. 1, отличающаяся тем, что аппаратура системы горизонтирования выполнена автономно, снабжена органами управления, датчиками и исполнительными устройствами, работающими от гидросистемы.
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РЛС ДЕЦИМЕТРОВОГО ДИАПАЗОНА | 2008 |
|
RU2394253C1 |
| Станок для изгибания кольцеобразных заготовок для ножей в винтообразную форму | 1933 |
|
SU38407A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 1995 |
|
RU2115947C1 |
| JP 2007271383 A, 18.10.2007 | |||
| WO 2012143251 A1, 26.10.2012 | |||
| US 20120139786 A1, 07.06.2012 | |||
| JP 2003202369 A,18.07.2003. | |||

