Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано на железнодорожной станции любой конфигурации, оборудованной системой электрической централизации, для контроля ее полигонов и парков.
Известен аппаратно-программный комплекс диспетчерского контроля, состоящий из периферийного оборудования в виде устройств контроля и устройств съема информации с устройствами автоматики станционного и перегонного оборудования, узлов ввода-вывода данных нескольких уровней в виде центрального и периферийных концентраторов, линий связи, по крайней мере, двух ветвей блока: ветви диспетчеризации, состоящей из оборудования диспетчерских центров пользователей, снабженных программными средствами, и обеспечивающей принятие решения по оперативному управлению станционным и перегонным оборудованием с возможностью получения накопленных и проанализированных статистических данных о сбоях в работе устройств автоматики станционного и перегонного оборудования и данных с устройств контроля и съема информации, и ветви технического контроля, и анализа данных с возможностью воздействия высшего уровня управления на устройства периферийного оборудования (RU 47123 U1, G08C 19/00, 10.08.2005).
Аппаратно-программный комплекс контролирует занятие отдельных участков пути на станции по состоянию рельсовых цепей, но не обеспечивает контроль передвижений вагонов и локомотивов по станции.
Наиболее близкой к предлагаемой системе контроля состояния полигонов и парков железнодорожной станции является система маневровой автоматической локомотивной сигнализации, состоящая из бортовой аппаратуры, станционного устройства и сервисного оборудования, предназначенного для проверки работоспособности, диагностики и выявления дефектов в бортовой аппаратуре и станционном устройстве (RU 2369509 C1, B61L 27/04, 10.10.2009).
В известной системе станционное устройство включает управляющий вычислительный комплекс, который обеспечивает контроль поездной ситуации на основе данных, получаемых от устройств электрической централизации посредством контроллера сбора данных, взаимодействие с бортовой аппаратурой и сервисным оборудованием по цифровому радиоканалу, контроль поддержки радиосвязи с локомотивами, а также осуществляет контроль передвижения подвижных единиц. Бортовая аппаратура включает бортовой контроллер, блок индикации, блок управления, блок переключателей, датчики импульсов и радиостанцию, принимающую информацию на процессорный модуль бортового контроллера и осуществляющую обмен информацией с радиостанцией, входящей в состав станционного устройства, и радиостанцией, входящей в состав сервисного оборудования, имеющего двухуровневую архитектуру.
Известная система осуществляет контроль поездной ситуации на основе данных, получаемых от устройств электрической централизации, контролирующих состояние рельсовых цепей и стрелочных переводов. Однако данные о состоянии рельсовых цепей и стрелочных переводов не позволяют осуществлять достоверный контроль перестановок групп вагонов в случаях разъединения или сборки составов в парках и маневровых районах станции, поскольку отсутствуют средства идентификации отдельных вагонов.
Задачей настоящего изобретения является создание системы контроля состояния полигонов и парков железнодорожной станции, обеспечивающей достоверный контроль перестановок групп вагонов в случаях разъединения или сборки составов в парках и маневровых районах станции.
Техническим результатом изобретения является повышение эффективности контроля накопления вагонов в парках железнодорожной станции за счет автоматического обеспечения автоматизированной системы управления железнодорожной станцией достоверной оперативной информацией в режиме реального времени о передвижениях вагонов и локомотивов между парками станции с точностью до вагона или локомотива.
Технический результат достигается тем, что система контроля перемещения подвижных объектов на железнодорожной станции содержит установленные на рельсовых цепях стрелок, отделяющих пути горизонтальных парков станции от маневровых районов и от входной и выходной горловин станции, реверсивные датчики счета осей, выходами подключенные через блок обработки сигналов к первому входу блока расчета скорости подвижного объекта, выход которого соединен с входом блока определения колесной формулы подвижного объекта, вторым входом подключенного ко второму выходу блока обработки сигналов, а выходом - к первому входу центрального процессора, второй вход которого соединен через последовательно соединенные блок формирования динамической модели станции и блок обработки данных к выходу аппаратно-программного устройства системы электрической централизации, блок памяти, входами/выходами подключенный к выходу/входу центрального процессора, второй вход/выход которого соединен через сервер связи с аппаратно-программным устройством автоматизированной системы управления станцией, а выходы - с входами блоков регистрации дислокации подвижного объекта и регистрации состояния устройств электрической централизации, входы/выходы которых подключены к аппаратно/программным устройствам автоматизированных рабочих мест соответственно дежурного по станции и дежурного электромеханика.
Сущность изобретения подтверждается чертежом, на котором представлена структурная схема предлагаемой системы контроля перемещения подвижных объектов на железнодорожной станции.
Система контроля перемещения подвижных объектов на железнодорожной станции содержит установленные на рельсовых цепях стрелок, отделяющих пути горизонтальных парков станции от маневровых районов и от входной и выходной горловин станции, реверсивные датчики 1 счета осей, выходами подключенные через блок 2 обработки сигналов к первому входу блока 3 расчета скорости подвижного объекта, выход которого соединен с входом блока 4 определения колесной формулы подвижного объекта, вторым входом подключенного ко второму выходу блока 2 обработки сигналов, а выходом - к первому входу центрального процессора 5, второй вход которого соединен через последовательно соединенные блок 6 формирования динамической модели станции и блок 7 обработки данных к выходу аппаратно-программного устройства системы 8 электрической централизации, блок 9 памяти, входами/выходами подключенный к выходу/входу центрального процессора 5, второй вход/выход которого соединен через сервер 10 связи с аппаратно-программным устройством автоматизированной системы управления станцией, а выходы - с входами блоков 11 и 12 регистрации дислокации подвижного объекта и регистрации состояния устройств электрической централизации, входы/выходы которых подключены к аппаратно-программным устройствам автоматизированных рабочих мест соответственно дежурного по станции и дежурного электромеханика (АРМ ДСП и АРМ ШН).
Система контроля перемещения подвижных объектов на железнодорожной станции работает следующим образом.
В режиме реального времени данные от системы 8 электрической централизации о состоянии рельсовых цепей и положении стрелок поступают в блок 7 обработки данных. По результатам обработки полученных данных блок 7 формирует соответствующее сообщение и передает его в блок 6 формирования динамической модели станции.
В памяти блока 6 хранится электронная статическая модель станции, включающая данные о взаимном расположении рельсовых цепей и стрелок, длине рельсовых цепей, расположении датчиков 1 счета осей и расстоянии от места их установки до ближайших стыков и стрелочных остряков.
На основании информации блока 7 обработки данных блок 6 формирует динамическую модель станции, отражающую на статической модели станции в каждый текущий момент времени состояние стрелок, рельсовых цепей.
По прибытии поезда на станцию последовательно занимаются рельсовые цепи от входного светофора до пути парка приема.
При этом информацию о последовательно занимаемых поездом рельсовых цепях (РЦ) система 8 электрической централизации передает через блок 7 в блок 6. Блок 6 регистрирует на динамической модели станции изменения состояния рельсовых цепей и информацию о номерах рельсовых цепей, занимаемых поездом, данные о которых направляет в центральный процессор 5. Центральный процессор 5 определяет зону дислокации по номеру первой и последней занятых поездом рельсовых цепей и через блок 10 связи направляет запрос в аппаратно-программное устройство АСУ СТ о вагонах и локомотиве прибывшего поезда.
Блок 10 связи передает из АСУ СТ в процессор 5 информацию о количестве осей для каждого прибывшего вагона и локомотива и его инвентарном номере.
На основании полученных данных центральный процессор 5 формирует описатель прибывшего поезда, включающий данные о количестве вагонов и локомотивов, входящих в его состав, о количестве осей и инвентарных номерах каждого вагона и зоне дислокации поезда. Описатель прибывшего поезда центральный процессор 5 направляет в блок 9 памяти для хранения.
При передвижении подвижных объектов между парками станции срабатывают соответствующие реверсивные датчики 1 счета осей. Сигналы с выходов датчиков 1 поступают в блок 2 обработки сигналов.
Блок 2 фиксирует время занятия и освобождения головок реверсивного датчика 1 каждой осью проследовавшего через стрелочный перевод подвижного объекта, осуществляет подсчет количества проехавших осей за время занятия рельсовой цепи, определяет направление движения подвижного объекта. Данные о времени занятия и освобождения каждой головки реверсивного датчика 1 блок 2 направляет в блок 3 расчета скорости подвижного объекта, данные о количестве осей подвижного объекта, о времени занятия каждой осью головок реверсивного датчика 2 и направлении движения - в блок 4 определения колесной формулы подвижного объекта.
Память блока 3 включает данные о расстоянии между головками датчиков 1. С учетом данных о времени занятия и освобождения осью подвижного объекта головок реверсивного датчика 1 и расстояния между ними блок 3 рассчитывает скорость движения подвижного объекта через стрелочный перевод, значение скорости движения подвижного объекта направляет в блок 4 определения колесной формулы.
Блок 4 с учетом значения скорости движения подвижного объекта и времени срабатывания датчика 1 между соседними осями подвижного объекта рассчитывает расстояние между осями и составляет колесную формулу подвижного объекта, характеризующую геометрические размеры входящих в его состав вагонов и локомотивов.
Колесную формулу подвижного объекта блок 4 направляет в процессор 5. Процессор 5 запрашивает нормативно-справочные данные о геометрических размерах различных типов вагонов и локомотивов в блоке 9 памяти, сравнивает полученные данные с колесной формулой подвижного объекта и определяет количество и типы прошедших через датчик вагонов и локомотивов в составе подвижного объекта.
Процессор 5 запрашивает из блока 6 данные о номерах рельсовых цепей, занимаемых подвижным объектом, учитывая направление его движения, определяет из них первую и последнюю рельсовые цепи, характеризующие его зону дислокации на путях станции в данный момент времени.
На основании полученных данных центральный процессор 5 формирует описатель для данного подвижного объекта. Описатель подвижного объекта содержит количество вагонов и локомотивов, входящих в его состав, их тип, количество осей и инвентарный номер каждого вагона и локомотива, а также данные зоны дислокации, включающие номера рельсовых цепей, на которых находится начало и конец подвижного объекта.
Процессор 5 запрашивает из блока 9 памяти описатель прибывшего на станцию поезда и сравнивает его с описателем подвижного объекта, по результатам сравнения определяет инвентарный номер каждого вагона и локомотива, входящего в состав подвижного объекта, и вносит его в описатель подвижного объекта.
В случае если в блоке 9 нет описателя для данного подвижного объекта, процессор 5 формирует новый описатель на основании данных о вагонах описателя прибывшего на станцию поезда, полученных от аппаратно-программного устройства АСУ СТ. Описатель подвижного объекта процессор 5 направляет в блок 9 памяти для хранения.
В случае разделения подвижного объекта при отцепке группы вагонов, прошедших по датчику 1 счета осей и освободивших смежную рельсовую цепь, центральный процессор 5 фиксирует новый подвижной объект и аналогичным образом формирует новый описатель. Причем для формирования нового описателя процессор запрашивает из блока 9 описатель предыдущего подвижного объекта и использует сведения об отделившихся вагонах.
При этом процессор 5 формирует сообщение о подвижном объекте и о его перемещениях и через сервер 10 связи передает его в аппаратно-программное устройство АСУ СТ.
Кроме того, после каждого пересчета зоны дислокации центральный процессор 5 передает измененные данные в блок 11 регистрации дислокации подвижного объекта в режиме реального времени. Изменения в дислокации подвижного объекта блок 11 фиксирует в своей памяти. При этом на дисплее АРМ ДСП отображается текущая технологическая ситуация на станции. Кроме того, регистрация изменений дислокации подвижного объекта во времени блоком 11 обеспечивает возможность просмотра исторических данных о передвижениях подвижного состава на станции.
После каждого изменения состояния напольного оборудования электрической централизации блок 7 формирует сообщения с измененными данными и передает их в блок 6 формирования динамической модели станции. Центральный процессор 5 в режиме реального времени осуществляет контроль за изменениями состояния напольного оборудования по динамической модели станции. Информацию об изменении состояния напольного оборудования электрической централизации центральный процессор 1 отправляет в блок 12 регистрации состояния устройств электрической централизации, который осуществляет протоколирование данных о состоянии устройств электрической централизации. При этом на дисплее АРМ ШН отображается текущее состояние напольных устройств на станции. Регистрация изменений состояния устройств электрической централизации блоком 11 обеспечивает возможность просмотра исторических данных об их состоянии.
Таким образом, предложенное техническое решение позволяет повысить эффективность контроля накопления вагонов в парках железнодорожной станции любой конфигурации, любого типа и назначения, оборудованных электрической централизацией стрелок и сигналов, за счет автоматического обеспечения АСУ СТ достоверной оперативной информацией в режиме реального времени о передвижениях вагонов и локомотивов между парками станции с точностью до вагона или локомотива.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ | 2014 |
|
RU2567099C1 |
| Система закрепления составов на путях железнодорожной станции | 2016 |
|
RU2618656C1 |
| Централизованная интегрированная система информирования пассажиров, оповещения работающих на железнодорожных путях и станционной двухсторонней парковой связи | 2017 |
|
RU2667682C1 |
| Комплексная система управления маневровыми локомотивами | 2019 |
|
RU2725575C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| СИСТЕМА ГОРОЧНОЙ МИКРОПРОЦЕССОРНОЙ ЦЕНТРАЛИЗАЦИИ (ГМЦ) | 2017 |
|
RU2648488C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| ЦЕНТРАЛИЗОВАННАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМИРОВАНИЯ ПАССАЖИРОВ, ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ И СТАНЦИОННОЙ ПАРКОВОЙ СВЯЗИ | 2012 |
|
RU2497176C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики. Система содержит установленные на рельсовых цепях стрелок реверсивные датчики счета осей, выходами подключенные через блок обработки сигналов к первому входу блока расчета скорости подвижного объекта, выход которого соединен с входом блока определения колесной формулы подвижного объекта, вторым входом подключенного ко второму выходу блока обработки сигналов, а выходом - к первому входу центрального процессора. Причем второй вход процессора соединен через последовательно соединенные блок формирования динамической модели станции и блок обработки данных к выходу аппаратно-программного устройства системы электрической централизации, блок памяти, подключенный к центральному процессору, второй вход/выход которого соединен через сервер связи с аппаратно-программным устройством автоматизированной системы управления станцией. Центральный процессор соединен с блоками регистрации дислокации подвижного объекта и регистрации состояния устройств электрической централизации, которые подключены к аппаратно/программным устройствам автоматизированных рабочих мест соответственно дежурного по станции и дежурного электромеханика. Достигается повышение эффективности контроля накопления вагонов в парках железнодорожной станции. 1 ил.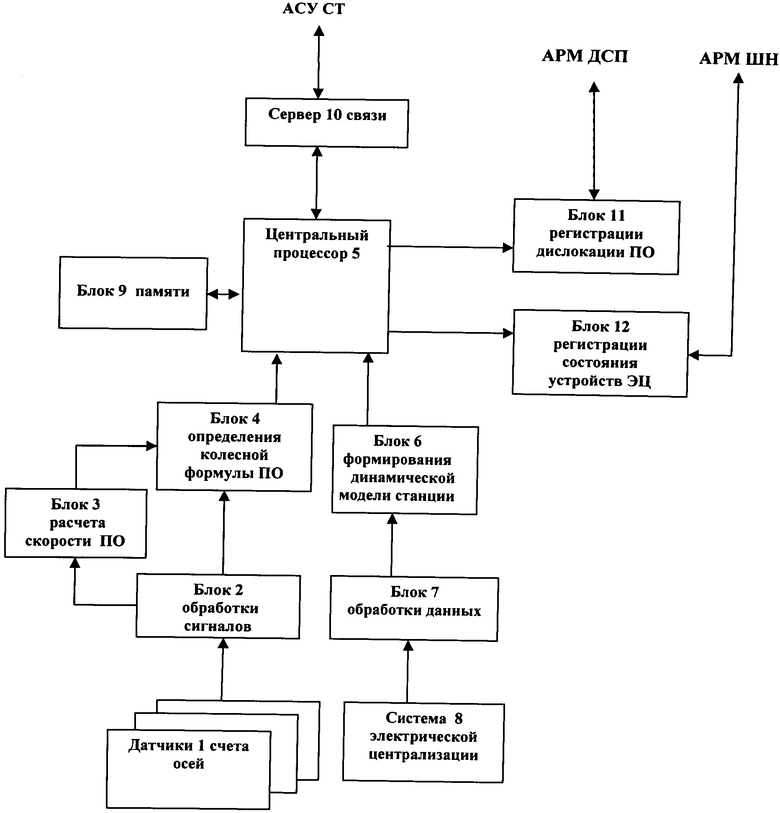
Система контроля перемещения подвижных объектов на железнодорожной станции, содержащая установленные на рельсовых цепях стрелок, отделяющих пути горизонтальных парков станции от маневровых районов и от входной и выходной горловин станции, реверсивные датчики счета осей, выходами подключенные через блок обработки сигналов к первому входу блока расчета скорости подвижного объекта, выход которого соединен с входом блока определения колесной формулы подвижного объекта, вторым входом подключенного ко второму выходу блока обработки сигналов, а выходом - к первому входу центрального процессора, второй вход которого соединен через последовательно соединенные блок формирования динамической модели станции и блок обработки данных к выходу аппаратно-программного устройства системы электрической централизации, блок памяти, входами/выходами подключенный к выходу/входу центрального процессора, второй вход/выход которого соединен через сервер связи с аппаратно-программным устройством автоматизированной системы управления станцией, а выходы - с входами блоков регистрации дислокации подвижного объекта и регистрации состояния устройств электрической централизации, входы/выходы которых подключены к аппаратно/программным устройствам автоматизированных рабочих мест соответственно дежурного по станции и дежурного электромеханика.
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |

