Изобретение относится к устройствам железнодорожной автоматики, в частности к системам закрепления составов на путях железнодорожных станций.
Известна система закрепления составов на путях железнодорожной станции, содержащая механизированные устройства закрепления, правильность закрепления которых гарантируется конструкцией устройств, включающей контрольные тяги, соединенные одним концом с кронштейнами колодок, а другим (через планки и коромысла рычажного механизма) - с контрольными линейками электропривода для контроля положения колодок упора в рабочем и нерабочем положениях (Кобзев В.А. «Развитие технических средств обеспечения безопасности станционных процессов». М.: МИИТ, 2008, с. 26-30, рис. 2.6). Перевод колодок упора из нерабочего положения в рабочее и обратно осуществляют схемы местного и центрального управления электроприводом. Местное управление упором осуществляется сигналистом с местного пульта. Центральное управление осуществляется дежурным по станции с пульта управления на центральном посту при участии сигналиста, который следит за закреплением состава колодками упора.
Недостатком известной системы является необходимость присутствия сигналиста в опасной зоне на железнодорожных путях в непосредственной близости от упора, который должен следить за закреплением состава.
Наиболее близким аналогом является устройство для дистанционного контроля и управления станционным тормозным упором для закрепления состава, содержащее цепь управления электропривода, шарнирно соединенного с рычажным механизмом стационарного тормозного упора, и модуль контроля и управления, выходом соединенный со светофором и посредством канала связи с напольным контроллером. На внутренней стороне рельса размещены на заданных расстояниях друг от друга путевые датчики для подсчета количества колесных пар подвижного состава, два из которых закреплены перед колодкой тормозного упора, а третий - за колодкой. Выходы датчиков соединены с входами модуля контроля и управления, соответствующий выход которого подключен к цепи управления электропривода. Входы/выходы напольного контроллера подключены к пульту управления дежурного по станции, блок индикации и монитор которого выполнены с возможностью отображения состояния датчиков. Дополнительно устройство может включать видеокамеру, соединенную с соответствующим входом модуля контроля и управления (RU 2399534 С1, B61L 5/00, B61L 7/00, 20.09.2010 г.).
Известное устройство позволяет снизить эксплуатационные расходы за счет сокращения времени закрепления-раскрепления состава и высвобождения эксплуатационного персонала от участия в процессе закрепления-раскрепления состава.
Недостатком данного устройства является наличие аппаратуры дистанционного и местного управления закрепления/раскрепления составов, что увеличивает эксплуатационные расходы на содержание устройства, а также увеличивает время, необходимое для выполнения технологических операций закрепления/раскрепления составов поездов.
Задачей, на решение которой направлено настоящее изобретение, является создание автоматизированной системы закрепления и контроля закрепления составов на путях железнодорожной станции.
Технический результат заключается в автоматизации закрепления составов на путях станционного парка с возможностью дистанционного контроля процесса закрепления за счет использования энергонезависимых домкратовидных точечных замедлителей и средств дистанционного контроля закреплении состава в режиме реального времени.
Технический результат достигается тем, что система для закрепления составов на железнодорожных путях содержит устройства закрепления, выполненные в виде домкратовидных точечных замедлителей и установленные на каждом пути станционного парка группами из не менее семи устройств закрепления на заданном расстоянии друг от друга, путевые датчики фиксации прохода осей подвижного состава, закрепленные на рельсе каждого пути станционного парка в начале и в конце первой группы устройств закрепления, последовательно соединенные блок контроля состояния путевых датчиков и контроллер, выходом соединенный через центральный процессор системы электрической централизации с соответствующим входом аппаратно-программного устройства автоматизированного рабочего места дежурного по станции, при этом выход каждого путевого датчика фиксации прохода осей подвижного состава подключен к соответствующему входу блока контроля состояния путевых датчиков, причем количество Nгp групп устройств закрепления, устанавливаемых на участке пути, рассчитывают по формуле
где
Q - максимальный вес состава, размещаемого на данном участке пути, тонн;
icp - средний уклон на участке пути с учетом ветровой нагрузки,  ;
;
Fз - удерживающее усилие одной группы устройств закрепления, тонн.
Блок контроля состояния путевых датчиков установлен в релейном шкафу и включает последовательно соединенные блок сопряжения и микропроцессор, при этом выходом блока контроля закрепления состава является выход микропроцессора, а входами - входы блока сопряжения.
Устройства закрепления установлены на рельсах с внутренней стороны колеи.
Контроллер установлен на посту горочной автоматической централизации.
Для повышения надежности контроля закрепления составов система включает дополнительные путевые датчики фиксации прохода осей подвижного состава, установленные на другом рельсе каждого пути станционного парка в начале и в конце первой группы устройств закрепления и подключенные выходами к соответствующим входам блока контроля состояния путевых датчиков.
Путевые датчики фиксации прохода осей подвижного состава закреплены на подошве рельса с внутренней стороны колеи.
Для надежного закрепления состава группы устройств закрепления установлены на пути с возможностью обеспечения закрепления не менее одного колеса тележки каждого вагона, размещенного в зоне их установки.
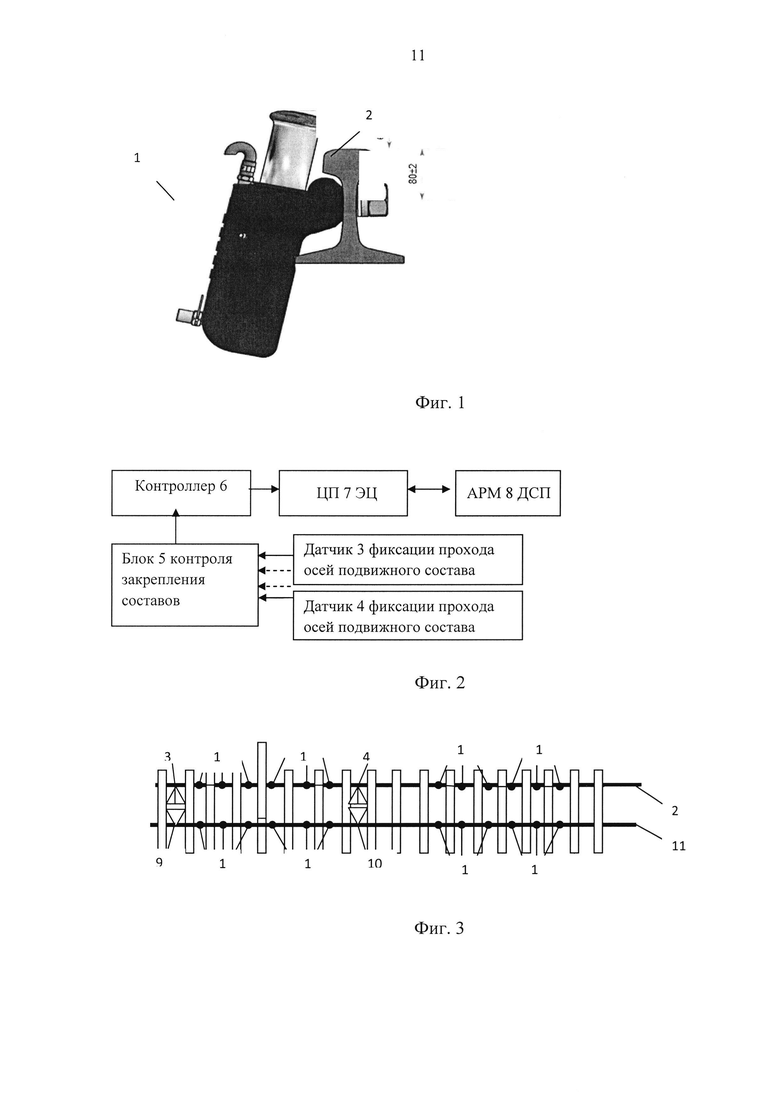
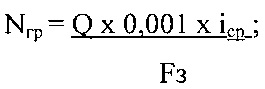
Сущность предлагаемого изобретения поясняется на фиг. 1-3. На фиг. 1 изображено устройство закрепления, на фиг. 2 - структурная схема контроля закрепления состава на путях железнодорожной станции предлагаемой системы, на фиг. 3 - схема размещения устройств закрепления и путевых датчиков фиксации прохода осей подвижного состава на пути станционного парка.
Система закрепления составов на путях железнодорожной станции содержит устройства 1 закрепления, установленные на рельсах 2 и 11 каждого пути станционного парка группами из не менее семи устройств 1 закрепления на заданном расстоянии друг от друга, путевые датчики 3 и 4 фиксации прохода осей подвижного состава, закрепленные на одном рельсе 2 каждого пути станционного парка соответственно в начале и в конце первой группы устройств 1 закрепления, последовательно соединенные блок 5 контроля состояния путевых датчиков и контроллер 6, выходом соединенный через центральный процессор 7 системы электрической централизации (ЦП 7 ЭЦ) с соответствующим входом аппаратно-программного устройства автоматизированного рабочего места 8 дежурного по станции (АРМ 8 ДСП).
Блок 5 контроля состояния путевых датчиков установлен в релейном шкафу и включает последовательно соединенные блок сопряжения и микропроцессор (не показаны), при этом выходом блока 5 контроля закрепления состава является выход микропроцессора, а входами - входы блока сопряжения.
Дополнительные путевые датчики 9 и 10 фиксации прохода осей подвижного состава установлены на другом рельсе 11 каждого пути станционного парка в начале и в конце первой группы устройств 1 закрепления. Выход каждого путевого датчика 3 и 4, 9 и 10 подключен к соответствующему входу блока сопряжения блока 5.
Каждое устройство 1 закрепления установлено с внутренней стороны колеи в соответствующем шпальном ящике.
Контроллер 6 установлен на посту горочной автоматической централизации (не показано).
Путевые датчики 3 и 4, 9-10 фиксации прохода осей подвижного состава закреплены на подошве рельса с внутренней стороны колеи. Путевые датчики 3 и 4, 9-10 фиксируют проход осей тележек вагонов подвижного состава на станционном пути и определяют направление движение состава.
Группы устройств 1 закрепления установлены на пути с возможностью обеспечения закрепления не менее одного колеса тележки каждого вагона состава, размещенного в зоне их установки. Причем первую группу устройств 1 закрепления устанавливают либо в конце пути парка, либо в начале.
В качестве устройств 1 закрепления используют домкратовидные точечные замедлители (фиг. 1), настроенные на нулевую скорость замедления, например точечные замедлители стоппер J-4015S (разработчик и производитель New Joules Engineering Inc., ЮАР).
Количество домкратовидных точечных замедлителей (один или два) в одном шпальном ящике определяют на стадии рабочего проектирования. Количество домкратовидных точечных замедлителей в группе установлено опытным путем. Семь замедлителей с заданными характеристиками в группе обеспечивают закрепление по меньшей мере одного колеса тележки вагона, установленного на станционном пути в зоне размещения группы замедлителей, независимо от длины колесной базы и длины вагона.
При расчете количества групп домкратовидных точечных замедлителей учитывают Q - максимальный вес состава, который можно разместить на данном участке пути, icp - средний уклон на участке пути с учетом ветровой нагрузки, и Fз - удерживающее усилие одной группы устройств закрепления.
Закрепление состава осуществляется автоматически за счет упора колес тележек состава на шток домкратовидных точечных замедлителей группы. При скорости надвигаемого состава 5-10 км/ч домкратовидные точечные замедлители обеспечивают его остановку с силой горизонтального торможения не менее 8000 N.
Система работает следующим образом.
Машинист маневрового локомотива приводит состав на участок пути станционного парка и останавливает его перед знаком «остановка локомотива». При этом первая тележка первого вагона должна находиться в зоне установки первой группы устройств 1 закрепления.
В этом случае первая тележка первого вагона закрепляется за счет упора колес на шток четырех домкратовидных точечных замедлителей, а закрепление тележек вагонов состава, размещенных в зоне установки замедлителей, осуществляется за счет упора по меньшей мере одного колеса тележки на шток одного из домкратовидных точечных замедлителей группы. Это достигается благодаря тому, что точечные замедлители установлены группами таким образом, чтобы при размещении любого типа вагона в зоне их установки не менее одного колеса его тележки были надежно закреплены.
При прохождении состава датчики 4 и 10 реагируют на реборду колеса тележки вагона, сигналы с их выходов поступают в блок 5, который осуществляет их преобразование и обработку, по результатам которой формирует сигнал о прибытии подвижного состава на данный участок пути и передает его в контроллер 6 для последующей передачи в ЦП 7 ЭЦ. ЦП 7 ЭЦ регистрирует в своей памяти полученные данные и направляет их в аппаратно-программное устройство АРМ 8 ДСП. Блок отображения АРМ 8 ДСП информирует дежурного по станции о прибытии подвижного состава на данный участок пути парка соответствующей световой индикацией.
После отцепки локомотива и отпуска тормозов состава система осуществляет постоянный контроль закрепления состава с возможностью оперативного информирования дежурного по станции о результатах контроля.
Контроль закрепления состава на данном участке пути станционного парка осуществляют следующим образом.
Сигналы с выходов путевых датчиков 3, 4, 9, 10 поступают в блок 5, блок сопряжения которого осуществляет их преобразование, а микропроцессор - соответствующую обработку и формирование сигнала о закреплении или отсутствии закрепления состава на данном станционном пути. Отсутствие закрепления состава микропроцессор определяет в случае поступления сигналов с выходов датчиков 3 и 9 и/или 4 и 10, характеризующих движение состава. Сигнал о закреплении или отсутствии закрепления состава на данном станционном пути блок 5 контроля состояния путевых датчиков направляет в контроллер 6.
Контроллер 6 на основании полученного сигнала о результатах контроля закрепления состава на данном пути станционного парка формирует соответствующее сообщение, которое передает в соответствии с согласованным протоколом обмена в ЦП 7 ЭЦ.
ЦП 7 ЭЦ сообщения о контроле закрепления состава на данном пути станционного парка направляет в аппаратно-программное устройство АРМ 8 ДСП. При этом блок отображения АРМ 8 ДСП информирует дежурного по станции о закреплении или отсутствии закрепления состава на данном пути станционного парка соответствующей световой индикацией.
В результате дежурный по станции в режиме реального времени дистанционно осуществляет контроль закрепления составов на путях станционного парка, что позволяет оперативно принимать меры в случае нарушения работы устройств 1 закрепления.
Таким образом, предлагаемая система закрепления составов на путях железнодорожной станции осуществляет автоматическое закрепление состава без участия сигналистов и башмачников, позволяет дистанционно контролировать работу устройств закрепления и своевременно определять нарушения в их работе, что повышает безопасность и производительность процесса закрепления составов на путях железнодорожной станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВАГОНОВ/СОСТАВА ДОМКРАТОВИДНЫМИ ЗАМЕДЛИТЕЛЯМИ | 2021 |
|
RU2761123C1 |
| ГИДРОПОРШНЕВОЕ УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ СВОБОДНОГО ПРОЕЗДА, ЗАМЕДЛЕНИЯ, ОСТАНОВКИ И ЗАКРЕПЛЕНИЯ ВАГОНОВ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА НА ПУТЯХ СТАНЦИОННОГО ПАРКА | 2022 |
|
RU2793752C1 |
| Рычажно-пружинное устройство (варианты) и способ закрепления железнодорожного подвижного состава | 2018 |
|
RU2694881C1 |
| СИСТЕМА КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЖЕЛЕЗНОДОРОЖНОЙ СТАНЦИИ | 2014 |
|
RU2567306C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПОДГОРОЧНЫХ ПУТЕЙ СОРТИРОВОЧНОЙ СТАНЦИИ | 2008 |
|
RU2392151C2 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| СИСТЕМА ФОРМИРОВАНИЯ МНОГОГРУППНЫХ СОСТАВОВ | 2010 |
|
RU2452643C1 |
| Автоматизированная система закрепления железнодорожного подвижного состава | 2019 |
|
RU2706751C1 |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПОДГОРОЧНЫХ ПУТЕЙ СОРТИРОВОЧНОЙ СТАНЦИИ | 2010 |
|
RU2434774C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики. Система содержит устройства закрепления, выполненные в виде домкратовидных точечных замедлителей и установленные на каждом пути станционного парка группами из не менее семи устройств закрепления на заданном расстоянии друг от друга, путевые датчики фиксации прохода осей подвижного состава, закрепленные на рельсе каждого пути станционного парка в начале и в конце первой группы устройств закрепления, последовательно соединенные блок контроля состояния путевых датчиков и контроллер, выходом соединенный через центральный процессор системы электрической централизации с соответствующим входом аппаратно-программного устройства автоматизированного рабочего места дежурного по станции. Причем выход каждого путевого датчика фиксации прохода осей подключен к соответствующему входу блока контроля состояния путевых датчиков. Количество групп устройств закрепления рассчитывают с учетом максимального веса состава, размещаемого на данном участке пути, среднего уклона на участке пути с учетом ветровой нагрузки, удерживающего усилия одной группы устройств закрепления. Достигается повышение автоматизации закрепления составов. 6 з.п. ф-лы, 3 ил.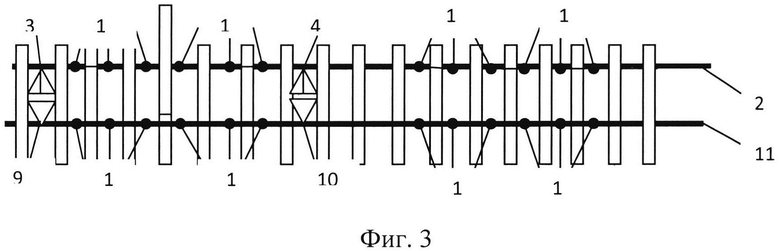
1. Система для закрепления составов на путях железнодорожной станции, содержащая устройства закрепления, выполненные в виде домкратовидных точечных замедлителей и установленные на каждом пути станционного парка группами из не менее семи устройств закрепления на заданном расстоянии друг от друга, путевые датчики фиксации прохода осей подвижного состава, закрепленные на рельсе каждого пути станционного парка в начале и в конце первой группы устройств закрепления, последовательно соединенные блок контроля состояния путевых датчиков и контроллер, выходом соединенный через центральный процессор системы электрической централизации с соответствующим входом аппаратно-программного устройства автоматизированного рабочего места дежурного по станции, при этом выход каждого путевого датчика фиксации прохода осей подвижного состава подключен к соответствующему входу блока контроля состояния путевых датчиков, причем количество Nгp групп устройств закрепления, устанавливаемых на участке пути, рассчитывают по формуле:
где
Q - максимальный вес состава, размещаемого на данном участке пути, тонн;
icp - средний уклон на участке пути с учетом ветровой нагрузки,  ;
;
Fз - удерживающее усилие одной группы устройств закрепления, тонн.
2. Система по п. 1, отличающаяся тем, что блок контроля состояния путевых датчиков установлен в релейном шкафу и включает последовательно соединенные блок сопряжения и микропроцессор, при этом выходом блока контроля закрепления состава является выход микропроцессора, а входами - входы блока сопряжения.
3. Система по п. 2, отличающаяся тем, что устройства закрепления установлены на рельсах с внутренней стороны колеи.
4. Система по п. 3, отличающаяся тем, что контроллер установлен на посту горочной автоматической централизации.
5. Система по п. 4, отличающаяся тем, что введены дополнительные путевые датчики фиксации прохода осей подвижного состава, установленные на другом рельсе каждого пути станционного парка в начале и в конце первой группы устройств закрепления и подключенные выходами к соответствующим входам блока контроля состояния путевых датчиков.
6. Система по п. 5, отличающаяся тем, что путевые датчики фиксации прохода осей подвижного состава закреплены на подошве рельса с внутренней стороны колеи.
7. Система по п. 6, отличающаяся тем, что группы устройств закрепления установлены на путях с возможностью обеспечения закрепления не менее одного колеса тележки каждого вагона состава, расположенного в зоне их установки.
| СИСТЕМА ФОРМИРОВАНИЯ МНОГОГРУППНЫХ СОСТАВОВ | 2010 |
|
RU2452643C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ СТАЦИОНАРНЫМ ТОРМОЗНЫМ УПОРОМ ДЛЯ ЗАКРЕПЛЕНИЯ СОСТАВА | 2009 |
|
RU2399534C1 |
| WO 2012171096 A1, 20.12.2012 | |||
| DE 3043211 A1, 01.07.1982. | |||

