Область техники, к которой относится изобретение
Настоящее изобретение относится, в основном, к виртуальному артикулятору и к способу осуществления виртуальной артикуляции. В частности, настоящее изобретение относится к способу использования динамического виртуального артикулятора для имитационного моделирования окклюзии при выполнении автоматизированного проектирования одного или нескольких стоматологических протезов, реализуемому при помощи компьютера.
Уровень техники
Артикулятор является механическим устройством, предоставляющим упрощенную геометрическую модель черепа для имитационного моделирования относительных движений челюстей человека при исследовании окклюзии. Артикуляторы используются зубными техниками при моделировании стоматологических протезов для пациента. Применение артикулятора позволяет зубному технику не только моделировать протезы, но и анализировать прикус или окклюзию. При исследовании контактов между зубами верхней и нижней челюстей зубной техник может использовать копировальную бумагу, которая, будучи помещена между зубами обеих челюстей в артикуляторе, при движении челюстей окрашивает соприкасающиеся зубы.
Ниже описаны известные виртуальные артикуляторы, которые являются цифровым представлением физических артикуляторов.
В публикации WO 08113313 A описан способ изготовления зубного протеза, включающий следующие стадии: сбор биометрических данных о пациенте, в частности данных о верхней и нижней челюстях с зубами и без зубов, о размерах челюстей, о пространственном расположении челюстей относительно черепа, об угле сагиттального суставного пути и о перемещении нижней челюсти, а также о результатах записи перемещения нижней челюсти; использование полученной информации при формировании виртуального артикулятора, содержащегося в главной памяти устройства обработки данных; построение в САПР (система автоматизированного проектирования) модели предварительно отформованных частей индивидуализированного артикулятора и отформованных стоматологических компонентов на основе собранных данных о пациенте; изготовление отформованных частей индивидуализированного артикулятора и отформованных стоматологических компонентов при помощи генеративного технологического процесса, основанного на зарегистрированных биометрических данных; включение предварительно отформованных частей индивидуализированного артикулятора и/или отформованных стоматологических компонентов в стандартизированный корпус артикулятора или генеративное изготовление всего артикулятора с индивидуализированными предварительно отформованными компонентами.
В публикации US 2002048741 описан программно реализованный способ создания стоматологической модели для описания артикуляции, причем способ включает следующие стадии: предоставление первого блока цифровых данных, соответствующих изображению части или всей верхнечелюстной зубной дуги пациента; предоставление второго блока цифровых данных, соответствующих изображению части или всей нижнечелюстной зубной дуги пациента; предоставление информации, дающей представление о расположении оси нижней челюсти, и позволяющей охарактеризовать пространственную ориентацию одной из двух или обеих верхнечелюстной и нижнечелюстной зубных дуг относительно оси нижней челюсти пациента; предоставление информации о конфигурации прикуса, дающей представление о взаимном пространственном положении верхнечелюстной зубной дуги и нижнечелюстной зубной дуги пациента; выравнивание изображения верхнечелюстной дуги и изображения нижнечелюстной дуги на основе данных о конфигурации прикуса; формирование реперной оси нижней челюсти по отношению к выровненным изображениям верхнечелюстной и нижнечелюстной зубных дуг на основе данных об оси нижней челюсти.
В публикации US 2004172150 A описана система для проектирования виртуальной стоматологической модели, содержащая следующее: виртуальный артикулятор, представляющий трехмерную модель верхнечелюстной и нижнечелюстной зубных дуг пациента, содержащую данные об ограничениях движения и имеющую множество степеней свободы между указанными верхнечелюстной и нижнечелюстной зубными дугами; программный анализатор для имитационного моделирования указанного движения при помощи указанной трехмерной модели и анализа итоговых контактов на частях указанных верхнечелюстной и нижнечелюстной зубных дуг во время указанного движения для получения данных о контактах, причем указанные контакты характеризуются последовательностью появления во времени; и проектирующий модуль для разработки одного виртуального протеза для одной из указанных верхнечелюстной и нижнечелюстной зубных дуг и виртуальной желаемой коррекции зубов на основе указанных данных о контактах, полученных при помощи указанного программного анализатора и указанного виртуального артикулятора.
В публикации US 2007207441 описаны способ и системы четырехмерного моделирования динамических процессов движения челюсти и зубов, которые представлены цифровой моделью, полученной на основе трехмерных данных во временной развертке. Модели полных верхней и нижней челюстей составлены на основе внутриротовых трехмерных данных во временной развертке, на основе чего получена действительная четырехмерная модель. Диагностическая и медицинская практика подразумевают балансирование окклюзии и характеризацию геометрических параметров височно-нижнечелюстного сустава. Четырехмерная модель полностью совместима с традиционными методами визуализации, например, КГ (компьютерная томография), используемыми для составления полной виртуальной модели организма пациента. Согласно одному варианту осуществления изобретения, описанному в документе, стандартная координатная система с центрированной осью и положение прикуса определяются следующим: a) задание нижней окклюзионной плоскости при помощи полной нижней модели; b) задание пространственного положения окклюзионной плоскости под фиксированным углом приблизительно 15° к реперной горизонтальной линии; c) ориентация модели нижнечелюстной зубной дуги со средней линией челюсти перпендикулярно центрированной оси; d) использование фиксированного осево-резцового расстояния для окончательного задания положения нижней модели и центрированной оси; и е) расположение верхней модели по отношению к нижней при помощи скана прилегающей области или конфигурации прикуса.
В публикации WO 09133131 A описан способ применения виртуального артикулятора, включающий следующее: загрузка цифровой стоматологической модели пациента в компьютер с запущенной программой имитационного моделирования виртуального артикулятора и проведение имитационного моделирования одного или нескольких виртуальных функциональных движений, при этом производится оценка одного или нескольких параметров, относящихся к движению челюсти при осуществлении коррекции зубов, причем по одному или нескольким движениям челюсти в центральном направлении, выбирается один или несколько параметров, относящихся к движению челюсти, таких как скорость конкретного движения челюсти и угол вращательного движения челюсти.
Задача состоит в предоставлении усовершенствованного виртуального артикулятора, имитирующего конструкцию и работу физического артикулятора.
Раскрытие изобретения
Предложен способ использования динамического виртуального артикулятора для имитационного моделирования окклюзии при выполнении автоматизированного проектирования одного или более стоматологических протезов для пациента, реализуемый при помощи компьютера, включающий следующие стадии: обеспечение виртуального артикулятора, содержащего виртуальную трехмерную модель верхней челюсти и виртуальную трехмерную модель нижней челюсти, повторяющие верхнюю челюсть и нижнюю челюсть пациента соответственно; обеспечение движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга для имитационного моделирования динамической окклюзии при возникновении контактов между зубами виртуальной верхней и виртуальной нижней челюстей, причем способ включает предотвращение пересечения между собой виртуальной поверхности зубов виртуальной верхней челюсти и виртуальной поверхности зубов виртуальной нижней челюсти при указанных контактах.
Предложен способ использования динамического виртуального артикулятора для имитационного моделирования окклюзии при выполнении планирования ортодонтической обработки зубов пациента при помощи средств автоматизированного проектирования, реализуемый посредством компьютера, включающий следующие стадии: обеспечение виртуального артикулятора, содержащего виртуальную трехмерную модель зубов, в которую входит верхняя челюсть, определяемая как виртуальная верхняя челюсть, и виртуальную трехмерную модель зубов, в которую входит нижняя челюсть, определяемая как виртуальная нижняя челюсть, повторяющие, соответственно, верхнюю челюсть и нижнюю челюсть пациента; обеспечение движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга для имитационного моделирования динамической окклюзии при возникновении контактов между зубами виртуальной верхней и виртуальной нижней челюстей, причем способ включает предотвращение пересечения между собой виртуальной поверхности зубов виртуальной верхней челюсти и виртуальной поверхности зубов виртуальной нижней челюсти при указанных контактах.
Преимущество заключается в том, что виртуальный артикулятор позволяет выполнять движения, повторяющие и имитирующие реальные процессы, происходящие во рту пациента, или процессы, протекающие при применении физического артикулятора, таким образом, относительное движение челюстей является физиологически реалистичным. Следовательно, преимущество заключается в том, что зубы верхней и нижней челюстей в виртуальном артикуляторе соответствуют физическим, твердым зубам, которые могут контактировать и соприкасаться друг с другом без взаимопроникновения. Под словом «зубы» могут подразумеваться естественные зубы во рту пациента с протезами или без них, а также протезы, полностью замещающие один или несколько зубов. Под словом «зубы» могут подразумеваться виртуальные зубы в виртуальной модели верхней и нижней челюстей, для которых не сформирован(ы) протез(ы). Таким образом, в процессе имитационного моделирования окклюзии или исследования, для которого применяется виртуальный артикулятор, зубы противоположных челюстей не могут пересекать виртуальные плоскости друг друга при контакте. Зубы в виртуальном артикуляторе выглядят, действуют и ведут себя как твердые тела с непроницаемой поверхностью и физическими свойствами, соответствующими зубам в физическом артикуляторе. Артикуляционные движения челюстей характеризуются ограничениями, не позволяющими челюстям и, следовательно, зубам проникать друг в друга. Можно сказать, что зубы в челюсти являются непроницаемыми или имеют свойство непроницаемости, то есть такое свойство материи, при котором два тела не могут находиться в одном месте в одно и то же время. Таким образом, противостоящие зубы в верхней и нижней виртуальных челюстях не могут занимать одно и то же виртуальное пространство одновременно.
Преимущество заключается в том, что виртуальный артикулятор является виртуальной геометрической моделью, например, физической системы, в состав которой входит физический артикулятор. Виртуальный артикулятор автоматически перемещает или позволяет пользователю перемещать две челюсти относительно друг друга. Данное движение ограничивается допустимым перемещением, определяемым геометрическими параметрами артикулятора. Челюсти могут состоять из томографических сканов и спроектированных моделей. В ином случае виртуальная артикуляция может основываться на генеративной модели, физиологической модели, ничем не ограниченном свободном движении и т.д.
Преимущество заключается в том, что виртуальный артикулятор может использоваться на любой стадии проектирования в процессе разработки стоматологических протезов, например, коронок или мостов, причем форма и размеры спроектированных протезов могут анализироваться на предмет корректности, то есть на предмет наличия во рту достаточного места для спроектированных протезов при относительном движении челюстей. Таким образом, функционирование стоматологических протезов проверяется путем имитационного моделирования окклюзии. Протез может представлять собой часть одного или нескольких зубов, следовательно, используемое в настоящем изобретении выражение «контакты между зубами» также охватывает или обозначает контакт между зубом и протезом, контакт между протезами, контакты между неизмененными зубами. Следовательно, зуб может иметь протез, а также может не иметь протеза. Таким образом, в данной заявке термин «зуб» и термин «протез» могут являться взаимозаменяемыми и в равной степени обозначать зуб с протезом или протез, полностью замещающий зуб.
В некоторых вариантах осуществления изобретения способ в некоторых случаях включает обеспечение проницаемости спроектированного(ых) протеза(ов) при контакте с противоположной виртуальной челюстью.
В некоторых вариантах осуществления изобретения способ включает обеспечение непроницаемости спроектированного(ых) протеза(ов) при контакте с противоположной виртуальной челюстью.
В некоторых вариантах осуществления изобретения способ включает обеспечение проницаемости спроектированного(ых) протеза(ов) при контакте с противоположной виртуальной челюстью.
Преимущество заключается в том, что по выбору пользователя или оператора программных средств протезы могут быть спроектированы проницаемыми или непроницаемыми.
Преимущество заключается в том, что движение виртуального артикулятора ограничивается недопустимостью проникновения обеих челюстей друг в друга, включая спроектированные модели, что достигается точным моделированием стачивания противостоящих зубов при жевании, в процессе чего происходит регистрация контактных зон. Это дает возможность оценить функциональные аспекты разработки на любом этапе проектирования, что аналогично процессу ручного использования физического артикулятора.
Виртуальная трехмерная модель верхней челюсти и нижней челюсти соответственно может содержать всю челюсть, или зубную дугу или, часть челюсти, соответствующую, допустим, какому-либо количеству зубов, например, половине зубов в челюсти.
Слова «челюсть» и «дуга» в некоторых случаях могут выражать одну и ту же физиологическую зону.
Настоящий способ может быть осуществлен при помощи программы, выполняющей имитационное моделирование виртуального артикулятора.
Виртуальный артикулятор имитирует движения физического артикулятора и движения настоящих челюстей пациента, а также не допускает взаимопроникновения противостоящих зубов. Кроме того, при движении виртуального артикулятора после контакта зубов следующее движение виртуальных челюстей соответствует движению зубов во рту или челюстей в физическом артикуляторе после контактов, при котором движение продолжается в определенном направлении с учетом параметров контактов, таких как направление, скорость, угол, импульс и т.д.
В программно реализованном способе известного уровня техники может быть обеспечена только статическая окклюзия прикуса, при этом верхняя и нижняя челюсти могут представляться только в статических положениях ввиду того, что изображение их взаимного перемещения не является возможным.
В вариантах осуществления изобретения известного уровня техники описаны контакты между челюстями, при которых челюсти проникают друг в друга. В вариантах осуществления изобретения известного уровня техники описаны контакты между трехмерными моделями зубов, при которых модели изображены проницаемыми ввиду того, что они являются виртуальными, причем между моделями отсутствуют фактические ограничения. Однако согласно настоящему способу виртуальные контакты отражают реальные контакты, происходящие во рту или в физическом артикуляторе. Настоящий способ включает воспроизведение контактов между верхней и нижней челюстями в реальном виде фактических контактов, при которых контактирующие зубы не могут проникать друг в друга, а проскальзывают мимо друг друга, как это происходит в реальности. Контактирующие зубы, таким образом, могут только соприкасаться друг с другом, без взаимопроникновения, так как они виртуально отверждены, а не представлены проницаемыми телами.
В вариантах осуществления изобретения способ далее включает одновременное моделирование одного или нескольких протезов и исследование контактов виртуальной верхней челюсти и виртуальной нижней челюсти.
Способ может в ином или некотором случае включать планирование одной или нескольких ортодонтических процедур для пациента и/или проектирование одной или нескольких ортопедических процедур для пациента и/или выполнение функционального анализа зубов пациента.
В вариантах осуществления изобретения способ далее включает автоматическое моделирование стоматологических протезов в противостоящих положениях в виртуальной верхней челюсти и в виртуальной нижней челюсти при необходимости формирования стоматологических протезов в противостоящих положениях.
В некоторых вариантах осуществления изобретения виртуальная верхняя челюсть и виртуальная нижняя челюсть могут перемещаться относительно друг друга.
Движение или перемещение может представлять собой свободное движение, ограниченное или несвободное движение, движение, основанное на модели артикулятора, например, физической или механической модели артикулятора и т.п.
В некоторых вариантах осуществления изобретения виртуальная верхняя челюсть зафиксирована таким образом, что нижняя челюсть может двигаться относительно виртуальной верхней челюсти.
Виртуальная верхняя челюсть может быть зафиксирована в виртуальном пространстве, в котором содержатся виртуальный артикулятор и модели верхних и нижних зубов.
В некоторых вариантах осуществления изобретения способ включает исследование контактов виртуальной верхней челюсти и виртуальной нижней челюсти исключительно вдоль окклюзионной оси виртуального артикулятора.
В некоторых вариантах осуществления изобретения способ далее включает фиксацию виртуальной верхней челюсти с окклюзионной осью таким образом, что нижняя челюсть может двигаться относительно виртуальной верхней челюсти.
Типичным свойством большинства физических артикуляторов является то, что его нижняя часть, удерживающая нижнюю челюсть, зафиксирована на окклюзионной оси, так как нижняя часть покоится на столе. При этом верхняя часть может двигаться относительно нижней части.
Преимущество заключается в том, что согласно настоящему способу верхняя челюсть зафиксирована относительно окклюзионной оси, что соответствует анатомическим особенностям человеческого черепа, у которого верхняя челюсть зафиксирована на черепе, а нижняя челюсть может перемещаться относительно верхней челюсти. Тем не менее, в ином случае нижняя челюсть может быть зафиксирована относительно окклюзионных осей.
В некоторых вариантах осуществления изобретения способ далее включает определение поисковой структуры на виртуальной верхней челюсти, предназначенной для поиска предварительно заданных круговых траекторий вращения вокруг окклюзионной оси с целью обнаружения контактов с поверхностью модели нижней челюсти.
В некоторых вариантах осуществления изобретения способ далее включает конфигурирование виртуальной нижней челюсти таким образом, что она может автоматически двигаться по одной или нескольким предварительно заданным траекториям перемещения относительно виртуальной верхней челюсти.
В некоторых вариантах осуществления изобретения способ далее включает обнаружение первого положения на окклюзионной оси, в котором контактируют виртуальная верхняя челюсть и виртуальная нижняя челюсть.
Преимущество этих вариантов осуществления изобретения заключается в том, что обычно расчет контактов между сложными 3D-моделями и представление ответного действия на контакты для предотвращения проникновения характеризуется значительными вычислительными затратами. Однако при использовании в моделях соответствующих трехмерных поисковых структур, предварительный расчет которых производится до выполнения исследований контактов, время вычисления может быть существенно уменьшено. К таким поисковым структурам относятся иерархии ограничивающих объемов, например, ААВВ-деревья (деревья ограничивающих боксов, направленных по осям, от англ. AABB-trees, Axis Aligned Bound Box trees), и структуры разбиения пространства (от англ. space partitioning structures), например, BSP-деревья (деревья двоичного разбиения пространства, от англ. BSP-trees, Binary Space Partition trees), октодеревья (деревья с делением на восемь ветвей от англ. Octrees), kd-деревья (k - мерные деревья, от англ. kd-tree).
В физических артикуляторах имеется множество степеней свободы, причем одна из степеней свободы движения задается осью вращения, которая моделирует окклюзию и также называется окклюзионной осью.
Преимущество заключается в том, что в настоящем виртуальном артикуляторе достаточно провести исследование контактов и оценить ответное действие вдоль окклюзионной оси, то есть для любой заданной конфигурации остальных степеней свободы и, таким образом, находится первое положение на окклюзионной оси, в котором между обеими моделями челюстей имеется контакт. Это уменьшает порядок вычислительной задачи и позволяет использовать более узко специализированные поисковые структуры, предназначенные для расчета первой точки пересечения с 3D-моделью по заданной круговой траектории вокруг неподвижной оси вращения. Таким образом, для каждой стадии движения вдоль одной из остальных осей, то есть для всех остальных степеней свободы, могут быть рассчитаны время и точки контакта зубов в челюстях вдоль окклюзионной оси. Следовательно, при каждом движении челюстей вдоль любой из осей, для исследования контакта между зубами, челюсти, по существу или на основе расчетов, могут быть сомкнуты и затем разомкнуты вдоль окклюзионной оси. Таким образом, могут быть сконфигурированы предварительно заданные траектории движения вдоль окклюзионной оси, причем для различных ситуаций могут быть рассчитаны характер, место и время контакта челюстей.
Преимущество, таким образом, заключается в формировании в модели верхней челюсти поисковой структуры, предназначенной для обнаружения круговых траекторий вокруг окклюзионной оси. Для любой конфигурации остальных степеней свободы такая поисковая структура может использоваться для проведения исследования контактов и ответных действий вдоль окклюзионной оси при поиске от поверхности модели нижней челюсти, что делает возможным исследование контактов и ответного действия в реальном времени.
Если бы верхняя челюсть и поисковая структура не были зафиксированы, поисковую структур необходимо было бы обновлять или пересчитывать при любых изменениях относительного положения модели челюсти и окклюзионной оси, при этом имитационное моделирование в реальном времени не представлялось бы возможным.
В некоторых вариантах осуществления изобретения контакты могут регистрироваться и визуально выделяться.
Преимущество данного изобретения заключается в том, что регистрируются и распознаются точки контакта, получаются полные поверхности точек контакта, на основе чего могут проектироваться, моделироваться и модифицироваться стоматологические протезы. Поверхность точек контакта может указывать след или след после движения.
В некоторых вариантах осуществления изобретения точки контакта образуют поверхность точек контакта.
Поверхность точек контакта может представлять след после движения. Поверхность точек контакта может быть визуализирована и использована при создании протеза(ов).
Может быть получена карта глубины контактов, обновляемая совместно с поверхностью точек контакта.
При имитационном моделировании перемещения неизмененных зубов относительно друг друга их следы после движения или их поверхности не могут взаимопроникать. То же самое может быть верным для протеза, относящегося к неизмененному зубу.
Однако в ином случае при имитационном моделировании перемещения протеза и неизмененного зуба относительно друг друга может быть верным то, что поверхность движения протеза может проникать в неизмененный зуб.
Таким образом, термины «поверхность контактов», «след точек контактов» или «поверхность точек контактов» используются для описания случаев имитационного моделирования перемещения неизмененных зубов относительно друг друга и контакта зубов без взаимопроникновения, а также для описания случаев имитационного моделирования относительного перемещения протеза и неизмененных зубов с возможным взаимопроникновением протезов и неизмененных зубов.
Имитационное моделирование контактов или поверхностей контактов между неизмененными зубами может определять движение, возможное между моделями верхних и нижних зубов.
Данное определенное движение может быть затем проанализировано и использовано при проектировании протеза.
Виртуально спроектированное приспособление или спроектированный протез могут быть вырезаны или разработаны согласно расположению следа после движения контактов.
В некоторых вариантах осуществления изобретения часть одного или нескольких стоматологических протезов, вступающих в контакт, могут автоматически удаляться из соответствующей виртуальной челюсти.
В ином случае пользователь может самостоятельно удалить часть, например, часть материала путем его ручного выбора в программных средствах, осуществляющих имитационное моделирование виртуального артикулятора.
Обычно протезы единовременно изготавливались только для одной челюсти, а не для обеих челюстей одновременно или параллельно. Согласно настоящему способу, например, коронка для зуба верхней челюсти и мост для зубов нижней челюсти, противостоящих зубу из верхней челюсти, теперь могут проектироваться одновременно. Таким образом, согласно настоящему способу, зубы, в том числе противостоящие зубы верхней и нижней челюстей, могут проектироваться, визуализироваться и анализироваться на предмет контактов одновременно.
В некоторых вариантах осуществления изобретения способ далее включает цифровую запись движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга.
Преимущество данного варианта осуществления изобретения заключается в том, что запись перемещений после моделирования протеза может быть воспроизведена для анализа процесса моделирования.
В некоторых вариантах осуществления изобретения может быть воспроизведено предварительно заданное движение виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга.
В некоторых вариантах осуществления предварительно заданное движение включает движение в одном или нескольких следующих направлениях:
- протрузия;
- ретрузия;
- латеротрузия вправо;
- латеротрузия влево;
- медиотрузия вправо;
- медиотрузия влево;
- латероресюртрузия вправо;
- латероресюртрузия влево.
В некоторых вариантах осуществления изобретения предварительно заданное движение может быть автоматически прервано на основе одного или нескольких ограничений.
Ограничения могут задаваться границами зубов. Ограничения могут задаваться соприкасающимися клыками в верхней и нижней челюстях.
В некоторых вариантах осуществления изобретения способ далее включает регистрацию всех контактов, происходящих между зубами при движении виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга, и моделирование точек контактов протезов по окончании этого движения.
Таким образом, осуществляется непрерывное движение челюстей, при котором одна челюсть перемещается, полностью накрывая плоскость другой челюсти, при этом регистрируются все возможные контакты между двумя челюстями с учетом накладываемых физиологических ограничений. Таким образом, происходит регистрация и накопление контактов во время движения, по окончании которого осуществляется моделирование на протезах точек контактов. В изобретениях известного уровня техники выбирается положение челюстей относительно друг друга, для данного положения регистрируются контакты, осуществляется моделирование протезов в данных точках контактов, после чего выбирается новое положение челюстей, для нового положения регистрируются контакты, осуществляется моделирование протезов в новых точках контактов и т.д.
При этом в изобретениях известного уровня техники отсутствует движение, не производится накопительной регистрации поверхностей точек контактов и отсутствует возможность выполнения параллельного моделирования протезов на основе всех точек контактов. В изобретениях известного уровня техники анализируется статическая окклюзия, а не динамическая окклюзия или артикуляция. Таким образом, в изобретениях известного уровня техники челюсти находятся в статическом положении относительно друг друга, другими словами, они зафиксированы друг относительно друга.
Преимущество настоящего изобретения заключается в том, что контакты накапливаются, и это позволяет получить совокупное представление о точках контактов или контактах. Анализ результатов совокупного представления о точках контактов и контактах дает возможность зубному технику осуществить соответствующее моделирование всех протезов с точками контактов.
Кроме того, преимущество заключается в том, что осуществляется непрерывное движение челюстей относительно друг друга, что соответствует использованию физического артикулятора, который может применяться зубным техником при работе. Таким образом, зубной техник может с легкостью освоить имитационное моделирование окклюзии в компьютерной программе, потому что виртуальное имитационное моделирование соответствует ручному имитационному моделированию и моделированию при помощи физической модели артикулятора.
В некоторых вариантах осуществления изобретения автоматически производится параллельное моделирование всех точек контактов протезов.
Таким образом, моделирование протезов в каждой точке контакта может осуществляться параллельно, одновременно, за один подход и т.п. Нет необходимости отдельно моделировать каждую конкретную точку контакта - часть точек контакта или все точки контакта протезов могут моделироваться совместно. Моделирование может включать удаление частей протезов, зарегистрированных как точки контакта, что соответствует ручному удалению материала из протеза.
В некоторых вариантах осуществления изобретения каждая точка контакта протеза может моделироваться отдельно.
В некоторых вариантах осуществления изобретения протезы являются проницаемыми.
Таким образом, зубы без протезов являются непроницаемыми, но сами протезы, например, часть зуба, являющаяся протезом, могут быть проницаемыми, что является преимуществом при моделировании протезов.
В некоторых вариантах осуществления изобретения виртуальная верхняя челюсть и виртуальная нижняя челюсть могут отталкиваться друг от друга после контакта.
След после движения может быть записан и использован для проектирования протеза(ов).
В некоторых вариантах осуществления изобретения движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга могут осуществляться в реальном времени и соответствовать естественным движениям артикулятора.
В некоторых вариантах осуществления изобретения способ далее включает выбор предварительно заданной геометрической модели виртуального артикулятора из множества предварительно заданных геометрических моделей.
Преимущество заключается в том, что пользователь может выбирать виртуальную геометрическую модель из множества предварительно заданных геометрических моделей, причем модели могут представлять физические, механические артикуляторы различных марок; геометрические модели, заданные пользователем, стандартные геометрические модели и т.п. Кроме того, геометрическая модель может быть физиологической или биологической моделью и т.д., например, геометрической моделью черепа. Следовательно, пользователь может выбрать подходящую модель для использования и применения в конкретном клиническом случае. Выбранная геометрическая модель может накладывать ограничения на движения, также геометрическая модель может обеспечивать свободное движение.
Выбранная геометрическая модель задает базис для исследуемой или моделируемой артикуляции и/или окклюзии.
В некоторых вариантах осуществления изобретения виртуальный динамический артикулятор может выбираться из множества виртуальных артикуляторов, соответствующих физическим артикуляторам.
В некоторых вариантах осуществления изобретения способ далее включает выбор числа степеней свободы для геометрической модели.
В некоторых вариантах осуществления изобретения способ далее включает выравнивание виртуальной верхней челюсти и виртуальной нижней челюсти для приведения их в соответствие анатомическим особенностям расположения челюстей пациента.
Данное выравнивание может быть определено как стандартное выравнивание.
В некоторых вариантах осуществления изобретения анатомическое расположение челюстей задается при помощи измерения геометрических параметров лица пациента.
В некоторых вариантах осуществления изобретения геометрические параметры лица пациента определяются путем сканирования лица пациента.
Трехмерное (3D) изображение лица пациента может быть получено путем сканирования лица. Сканирование лица может заключаться в получении неподвижных кадров, представляющих лицо в движении. В ином случае и/или помимо этого особые геометрические параметры лица пациента могут быть определены посредством лицевой дуги или стандартных электронных и оптических лицевых дуг, при этом лицевые дуги прикрепляются, например, к ушам или на обратную сторону челюстей. Таким образом, при движении челюстей пациента лицевыми дугами измеряется амплитуда соответствующих перемещений, на основе чего настраивается механический артикулятор. Движения могут представлять собой жевательные движения челюстей, открытие рта, выдвигание и задвигание челюсти и т.п.
В некоторых вариантах осуществления изобретения способ далее включает предоставление пользователю возможности двигать виртуальную нижнюю челюсть.
В ином случае обе виртуальные челюсти могут двигаться относительно друг друга.
В некоторых вариантах осуществления изобретения путем имитационного моделирования виртуальная нижняя челюсть может совершать движения в следующих направлениях:
- протрузия (прямое движение вперед);
- латеротрузия и медиотрузия (прямое-боковое движение в обоих направлениях: влево и вправо);
- ретрузия (прямое движение назад); и
- латероресюртрузия (движение в обоих направлениях: влево и вправо). Таким образом, движение может представлять собой следующее:
- протрузия;
- ретрузия;
- латеротрузия вправо;
- латеротрузия влево;
- медиотрузия вправо;
- медиотрузия влево;
- латероресюртрузия вправо;
- латероресюртрузия влево.
В некоторых вариантах осуществления изобретения способ далее включает позиционирование виртуальной плоскости выравнивания относительно виртуальной верхней челюсти и виртуальной нижней челюсти, при этом виртуальная верхняя челюсть и виртуальная нижняя челюсть описывают виртуальную модель зубного ряда, причем способ включает следующие стадии:
- визуализация виртуальной плоскости выравнивания, виртуальной верхней челюсти и виртуальной нижней челюсти; и
- автоматическое позиционирование виртуальной плоскости выравнивания, виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга.
Сначала в виртуальном артикуляторе может быть расположена модель виртуальной верхней челюсти и/или виртуальной нижней челюсти, после чего может быть спозиционирована плоскость выравнивания, или расположение модели и плоскости может быть осуществлено в обратной последовательности.
Виртуальная плоскость выравнивания также может не визуализироваться и оставаться, таким образом, невидимой или тусклой.
Преимущество заключается в том, что виртуальные модели могут выравниваться относительно плоскости выравнивания. Плоскость выравнивания может быть задана, например, на основе плоскости механического артикулятора. В механическом артикуляторе могут иметься отметки, например, выемки в вертикальных стойках для ручной коррекции положения красной резиновой ленты. Резиновая лента предназначена для расположения, например, взаимного выравнивания, двух физических моделей верхних и нижних зубов.
В некоторых вариантах осуществления изобретения автоматическое позиционирование основывается на одном или нескольких параметрах.
В некоторых вариантах осуществления изобретения способ далее включает позиционирование виртуальной плоскости выравнивания относительно виртуальной верхней челюсти и виртуальной нижней челюсти, при этом виртуальная верхняя челюсть и виртуальная нижняя челюсть описывают виртуальную модель зубного ряда, причем способ включает следующие стадии:
- визуализация виртуальной плоскости выравнивания, виртуальной верхней челюсти и виртуальной нижней челюсти; и
- автоматическое позиционирование виртуальной плоскости выравнивания, виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга на основе одного или нескольких параметров.
Преимущество заключается в том, что виртуальная плоскость выравнивания и виртуальные модели зубов позиционируются относительно друг друга на основе некоторых параметров, так как для осуществления позиционирования могут выбираться и использоваться подходящие доступные параметры, относящиеся к конкретному пациенту или случаю. Если ни один из особых параметров не доступен для конкретного пациента, могут использоваться стандартные параметры или параметры, установленные по умолчанию. Но если особые параметры пациента доступны, при использовании данных параметров результат может достигаться быстрее, и результат может быть лучше, нежели при использовании других параметров. Как описано ниже, индивидуализированные параметры пациента могут быть получены при помощи лицевой дуги, предоставляющей информацию о статической окклюзии, электронной лицевой дуги, предоставляющей информацию о статической и динамической окклюзии, сканера лица, также предоставляющего информацию о статической и динамической окклюзии, и т.д.
Виртуальная плоскость выравнивания может быть задана или определена несколькими способами. Виртуальная плоскость выравнивания может быть прямолинейной, ровной, криволинейной, неровной, неправильной формы, неоднородной и т.п. Плоскость выравнивания может содержать линию или соответствовать линии режущих или кусающих краев зуба и/или бугорков зуба.
Плоскость выравнивания может, например, соответствовать кривой Шпее. Кривая Шпее проходит по краям бугорков зубов и режущих краев зубов и расположена таким образом, что представляет собой плавную линеаризованную кривую при рассмотрении с латеральной стороны. Нижняя кривая Шпее имеет вогнутую форму, а верхняя кривая - выгнутую. Кривая Шпее может также называться компенсационной кривой зубной дуги.
Зубной ряд может быть полным рядом зубов, которые заполняют весь рот пациента. Также зубной ряд может являться частью полного ряда зубов, вследствие чего зубной ряд может также представлять собой, как минимум, часть ряда зубов.
Выражение «позиционирование относительно» обозначает перемещение виртуальной модели при зафиксированной в определенном положении виртуальной плоскости выравнивания, отображаемой, например, графическими средствами, скажем, на компьютерном экране, или обозначает перемещение виртуальной плоскости выравнивания при зафиксированной в определенном положении виртуальной модели, отображаемой, например, графическими средствами, скажем, на компьютерном экране. В обоих вариантах виртуальная модель и виртуальная плоскость выравнивания визуально перемещаются относительно друг друга.
Позиционирование может представлять собой расположение, размещение и т.п.
Окклюзия может быть определена как контакты между верхними и нижними зубами или как взаимосвязь между верхнечелюстными (верхними) и нижнечелюстными (нижними) зубами при смыкании челюстей во время жевания или в состоянии покоя.
В некоторых вариантах осуществления изобретения один или несколько параметров могут быть получены на основе скана лица пациента.
Преимущество заключается в том, что один или несколько параметров могут быть получены на основе результатов сканирования лица пациента, которые предоставляют данные о зарегистрированных движениях челюстей при динамической окклюзии, что позволяет записать динамические движения челюсти, соответствующие динамической окклюзии при жевательных движениях и открытии-закрытии рта.
Сканирование лица в ином случае и/или помимо этого может быть использовано для регистрации статической окклюзии пациента.
Информация о данной статической окклюзии или динамической окклюзии конкретного пациента может впоследствии использоваться при имитационном моделировании окклюзии на виртуальном артикуляторе, а плоскость выравнивания может быть спозиционирована относительно виртуальной модели зубов для физиологической коррекции зубного ряда для данного конкретного пациента.
При идентичности расположения зубов в виртуальном артикуляторе и во рту пациента артикуляция и окклюзия виртуального артикулятора будут физиологически правильными, что обеспечивает оптимальную подгонку и достижение наилучших результатов при моделировании протезов.
В качестве альтернативы сканеру лица могут применяться другие технические средства регистрации изображения «в реальном времени», например, компьютерный томограф и др.
Кроме того, в некоторых вариантах осуществления изобретения сканер лица может применяться для регистрации таких характеристик лица пациента, как срединная линия лица, срединная линия зубной дуги, плоскость, проходящая через режущие края, и/или межзрачковая линия.
Кроме того, в некоторых вариантах осуществления изобретения способ далее включает стадию имитационного моделирования и анализа динамических окклюзионных помех, причем указанные помехи частично или полностью выявляются при помощи множества сканов, на которых регистрируется челюстная артикуляция указанного пациента путем отслеживания одного или нескольких реперных объектов, зафиксированных на зубах пациента.
Другой последующий вариант осуществления изобретения включает стадию расчета челюстной артикуляции и, таким образом, имитационное моделирование и/или анализ динамических окклюзионных помех.
В некоторых вариантах осуществления изобретения для трехмерной регистрации движений челюстей и лица пациента в реальном времени применяется сканер лица.
В некоторых вариантах осуществления изобретения для регистрации положения верхней челюсти и/или нижней челюсти относительно черепа применяется сканер лица. Таким образом, сканер лица может использоваться вместо лицевой дуги, обычно применяемой для проведения статических измерений.
Таким образом, для регистрации линий лица, например, центральной линии или срединной линии, может применяться сканер лица, он также может применяться для регистрации движения челюстей, и/или он может применяться для регистрации прикрепления и/или движения челюстей относительно остальной части черепа.
Таким образом, для имитационного моделирования движений в виртуальном артикуляторе и проектирования стоматологических протезов усовершенствованной функциональности и улучшенной эстетичности используются зарегистрированные движения челюстей, точно соответствующие физическим движениям или перемещениям. Так, для разработки стоматологических протезов соответствующие измерения могут производиться сканером лица, при этом отпадает надобность в применении, например, обычных лицевых дуг, электронных лицевых дуг, а также в использовании стандартных величин, настроек и т.п.
В последующем варианте осуществления изобретения расчет и/или анализ челюстной артикуляции и/или динамических окклюзионных помех частично или полностью основывается на множестве сканов лица и одной или нескольких 3D-моделях предварительно препарированных и/или препарированных зубов, причем 3D-модель содержит противостоящие зубы. Для достижения оптимальной точности предпочтительно зафиксировать на зубах одну или несколько реперных сфер или объектов.
В некоторых вариантах осуществления изобретения для трехмерной регистрации движений челюстей пациента в реальном времени применяется сканер лица.
Преимущество состоит в том, что сканер лица осуществляет сканирование в реальном времени, причем «реальное время» относится к регистрации сканером движений в текущий момент времени, то есть сканер записывает полное движение по мере его осуществления, при этом регистрируется каждая фаза этого движения. Если сканер не производит запись в реальном времени, то само движение не может быть записано - могут быть зарегистрированы только некоторые отдельные точки, например крайние положения челюстей. Если сканер осуществляет съемку с частотой один кадр в минуту или формирование скана занимает одну минуту, такой сканер не обеспечивает сканирование в реальном времени, так как челюсти и мышцы лица двигаются значительно быстрее, чем это происходит при реальных жевательных движениях. Таким образом, сканер лица в реальном времени записывает поступательные движения путем съемки нескольких полных кадров трехмерного изображения в секунду, как это осуществляется видеокамерой.
В некоторых вариантах осуществления изобретения виртуальная плоскость задается и располагается относительно виртуального артикулятора.
В некоторых вариантах осуществления изобретения виртуальная плоскость фиксируется относительно виртуального артикулятора.
В некоторых вариантах осуществления изобретения виртуальная плоскость визуализируется относительно верхней и нижней моделей.
В некоторых вариантах осуществления изобретения виртуальная плоскость является виртуальной плоскостью выравнивания.
В некоторых вариантах осуществления изобретения виртуальная плоскость выравнивания фиксируется относительно виртуального артикулятора.
Преимущество заключается в расположении виртуальной плоскости или виртуальной плоскости выравнивания относительно виртуального артикулятора, что может усовершенствовать результат выравнивания моделей верхних и нижних зубов относительно друг друга. Преимущество заключается в том, что пользователь или оператор могут виртуально вращать модели с прикрепленной к ним плоскостью, а также могут увеличить изображение для анализа деталей, связанных с выравниванием моделей.
В некоторых вариантах осуществления изобретения виртуальная плоскость выравнивания является базовой окклюзионной плоскостью.
Преимущество заключается в том, что базовая окклюзионная плоскость может быть задана как плоскость, проходящая через окклюзионные или кусающие плоскости зубов. Она представляет среднюю кривизну окклюзионной поверхности. Она может быть задана плоскостью, проходящей через три конкретных зуба, как описано ниже. Кроме того, окклюзионная плоскость может быть определена как воображаемая поверхность, имеющая анатомическое отношение к черепу и теоретически касающаяся режущих краев резцов и вершин контактных поверхностей задних моляров. Кроме того, окклюзионная плоскость может проходить по линиям, проведенным между серединой резцового перекрытия, точкой вертикального наложения, спереди середины высоты бугорков последних моляров. Окклюзионная плоскость может быть отмечена на физическом, механическом артикуляторе резиновой лентой, расположенной в особых точках модели по отношению к зубам модели, при этом плоскость обозначается резиновой лентой.
В некоторых вариантах осуществления изобретения один или несколько параметров получаются по результатам сканирования лица пациента, причем регистрируются движения челюстей при динамической окклюзии пациента.
В некоторых вариантах осуществления изобретения челюсти пациента сканируются в реальном времени при помощи сканера лица, при этом получается трехмерное изображение.
В некоторых вариантах осуществления изобретения один или несколько параметров получаются по результатам измерения лица пациента лицевой дугой.
Преимущество заключается в том, что один или несколько параметров получаются по результатам измерения лица пациента лицевой дугой. Стандартная лицевая дуга представляет собой устройство, применяемое в зубоврачебной практике для регистрации статической окклюзии, например, устройство для регистрации пространственного положения верхнечелюстной зубной дуги относительно височно-нижнечелюстного сустава и ориентации стоматологических отпечатков в том же взаимном положении относительно оси вращения нижней челюсти артикулятора. Таким образом, лицевая дуга может давать возможность получения информации, на основе которой изготовление протеза точно соответствует расположению черепа/оси согласно анатомическим особенностям пациента. Применение механической лицевой дуги с электронной измерительной системой позволяет регистрировать динамическую окклюзию, а результаты измерения могут передаваться в компьютер проводным или беспроводным способом, а также могут сохраняться в модуле памяти. Таким образом, данные о результатах измерений посредством электронной лицевой дуги могут передаваться в компьютер для упрощения размещения плоскости выравнивания по отношению к виртуальной модели зубов.
Примером электронной лицевой дуги является лицевая дуга, которая обеспечивает точное измерение геометрических параметров посредством множества датчиков, таких как акустические передатчики и микрофоны. Электронная лицевая дуга может регистрировать движения нижней челюсти относительно черепа пациента. В ином случае электронная лицевая дуга может представлять собой лицевую дугу с магнитным принципом работы, или лицевая дуга может представлять собой лицевую дугу с ультразвуковым принципом работы, или лицевая дуга может представлять собой другую электронную систему, передающую записанные лицевой дугой данные в компьютер.
Лицевая дуга может прикрепляться к голове пациента, например, к ушам, над ушами или в ушах, а также к носовой кости между глаз. Прикусная вилка со слепочным материалом затем может вставляться в рот пациента при условии контакта материала с верхнечелюстной зубной дугой, при этом посредством, например, ультразвукового измерения, может быть определено расстояние между прикусной вилкой и определенными точками на лицевой дуге, и/или могут быть зарегистрированы движения челюстей. Данное расстояние может использоваться для получения определенных анатомических размеров лица и/или черепа пациента. Кроме того, на передней поверхности зубов нижнечелюстной зубной дуги может быть установлена другая металлическая вилка, а пациент может перемещать свою нижнюю челюсть в различные крайние положения, и посредством, например, ультразвукового измерения, могут быть зарегистрированы эти движения и крайние положения нижней челюсти относительно лицевой дуги, а на основе полученных результатов измерений могут быть определены динамическая окклюзия и/или необходимые анатомические размеры лица и/или черепа пациента.
Все результаты измерений статической и/или динамической окклюзии, полученные при помощи лицевой дуги, как описано выше, могут быть осуществлены и сохранены с использованием электронных средств, и результаты измерения, таким образом, могут быть переданы в компьютер, в котором осуществляется программно реализованный способ расположения виртуальной плоскости выравнивания относительно виртуальной модели зубов, и, следовательно, результаты регистрации динамической окклюзии пациента могут использоваться для расположения виртуальной плоскости выравнивания относительно виртуальной модели зубов.
Таким образом, динамическая окклюзия может быть записана электронными средствами и воспроизведена при моделировании, например, протеза.
Кроме того, в некоторых вариантах осуществления изобретения информация о движениях нижней челюсти относительно верхней челюсти поступает от лицевой дуги и используется для определения виртуальной плоскости выравнивания.
Кроме того, в некоторых вариантах осуществления изобретения информация о пространственном расположении верхнечелюстной зубной дуги относительно височно-нижнечелюстных суставов поступает от лицевой дуги и используется для задания виртуальной плоскости выравнивания.
В некоторых вариантах осуществления изобретения способ далее включает определение положения и ориентации лицевой дуги относительно верхнечелюстной зубной дуги пациента.
В некоторых вариантах осуществления изобретения способ далее включает определение положения и ориентации лицевой дуги относительно физического артикулятора.
В некоторых вариантах осуществления изобретения способ далее включает определение положения и ориентации лицевой дуги относительно виртуального артикулятора.
В некоторых вариантах осуществления изобретения лицевая дуга содержит прикусную вилку со слепочным материалом для снятия отпечатка верхнечелюстной зубной дуги, и способ далее включает определение положения и ориентации прикусной вилки относительно лицевой дуги.
В некоторых вариантах изобретения способ далее включает сканирование прикусной вилки с отпечатком верхнечелюстной зубной дуги для получения скана отпечатка и скана прикусной вилки.
Таким образом, могут быть получены скан отпечатка, скан прикусной вилки и оба скана: отпечатка и прикусной вилки.
Преимущество заключается в сканировании отпечатка на материале прикусной вилки, который, таким образом, может использоваться для выравнивания виртуальных верхней и нижней челюстей и/или выравнивания плоскости и т.д. Таким образом, виртуальная модель зубного ряда может быть выровнена по прикусной вилке и/или отпечатку на прикусной вилке путем соответствующего позиционирования углублений/выемок и выпуклостей/выступов на модели и на отпечатке.
В некоторых вариантах осуществления изобретения скан отпечатка выравнивается по виртуальной модели зубного ряда.
Преимущество заключается в выравнивании скана отпечатка на прикусной вилке относительно виртуальной модели зубов, то есть относительно моделей верхней и нижней челюстей. Углубления на слепочном материале соответствуют выпуклостям или выступам зубов, таким образом, углубления или выемки на скане отпечатка отвечают соответствующим выпуклостям или выступам на виртуальной модели зубного ряда.
В некоторых вариантах осуществления изобретения способ далее включает определение положения и ориентации прикусной вилки относительно виртуального артикулятора.
Таким образом, лицевая дуга имеет систему координат КЛД (FC, от англ. coordinates of facebow - координаты относительно лицевой дуги). Данная система координат КЛД непосредственно переносится в систему координат механического артикулятора КМА (СШ, от англ. coordinates of mechanical articulator - координаты относительно механического артикулятора), в который вставляется часть, соответствующая лицевой дуге с прикусной вилкой. На основе информации, полученной при помощи лицевой дуги, физические модели отпечатка зубов затем ставятся в соответствие артикулятору.
При необходимости доступа к информации о положении и ориентации по данным, полученным на основе координатной системы лицевой дуги КПД и координатной системы прикусной вилки КПВ (CBF, от англ. coordinates of bite fork - координаты относительно прикусной вилки) в системе координат виртуального артикулятора КВА (CVA, от англ. coordinates of virtual articulator - координаты относительно виртуального артикулятора), необходимо преобразовать данную информацию таким образом, чтобы она выражалась в цифровой форме или могла выражаться величинами, подлежащими считыванию и вводу в программные средства виртуального артикулятора.
Для передачи данных о расстоянии между положением прикусной вилки и точкой на лицевой дуге в систему координат виртуального артикулятора (КВА) необходимо определить и оцифровать это расстояние.
При использовании электронной лицевой дуги расстояние между прикусной вилкой и точкой на лицевой дуге измеряется электронными средствами, и результаты измерения электронными средствами могут передаваться в компьютер и систему координат виртуального артикулятора КВА.
Различные применяемые системы координат могут быть откалиброваны по отношению друг к другу.
В некоторых вариантах осуществления изобретения определение положения и ориентации прикусной вилки относительно виртуального артикулятора включает регулировку/подстройку скана отпечатка в виртуальном артикуляторе.
Таким образом, модель или файл в САПР, сформированные по результатам сканирования прикусной вилки, могут использоваться для выравнивания прикусной вилки и отпечатка на прикусной вилке в виртуальном артикуляторе.
В некоторых вариантах осуществления изобретения определение положения и ориентации прикусной вилки относительно виртуального артикулятора включает считывание величин лицевой дуги и/или прикусной вилки и ввод значений в пользовательский интерфейс для конфигурирования виртуального артикулятора.
В некоторых вариантах осуществления изобретения определение положения и ориентации прикусной вилки относительно виртуального артикулятора включает передачу данных электронными средствами от лицевой дуги и/или прикусной вилки в виртуальный артикулятор.
Такое возможно, если, например, лицевая дуга является электронной лицевой дугой.
В некоторых вариантах осуществления изобретения определение положения и ориентации прикусной вилки относительно виртуального артикулятора включает следующее:
- расположение прикусной вилки с отпечатком в специальном держателе в 3D-сканере; и
- калибровка положения и ориентации держателя относительно виртуального артикулятора.
Преимущество может достигаться при фиксированном или заданном положении прикусной вилки относительно лицевой дуги, например, если лицевая дуга является электронной лицевой дугой, при этом расстояние между конкретными точками на лицевой дуге и на прикусной вилке измеряется электронными средствами.
В некоторых вариантах осуществления изобретения определение положения и ориентации прикусной вилки относительно виртуального артикулятора включает выравнивание скана прикусной вилки по модели прикусной вилки в САПР.
Преимущество может достигаться при фиксированном или заданном положении прикусной вилки относительно лицевой дуги, например, если лицевая дуга является электронной лицевой дугой, при этом расстояние между конкретными точками на лицевой дуге и на прикусной вилке измеряется электронными средствами.
Выравнивание может осуществляться по итеративному алгоритму ближайших точек (ICP, от англ. iterative closest point), при этом минимизируется разница или расстояние между двумя облаками точек по сканам или моделям.
В некоторых вариантах осуществления изобретения задается преобразование между сканом отпечатка, и/или сканом прикусной вилки, и/или виртуальной моделью зубов, и/или моделью в САПР для их расположения в одной виртуальной системе координат в пользовательском интерфейсе путем калибровки различных систем координат для скана(ов), модели(ей) в САПР и/или виртуальной(ых) модели(ей).
В некоторых вариантах осуществления изобретения для получения окклюзионных данных выравниваются скан физической модели верхней челюсти, скан физической модели нижней челюсти и скан физических моделей обеих челюстей при окклюзии.
В некоторых вариантах осуществления изобретения оператором выполняется тонкая ручная подстройка положения виртуальной плоскости выравнивания относительно виртуальной модели зубного ряда.
В некоторых вариантах осуществления изобретения для позиционирования виртуальной плоскости выравнивания относительно виртуальной модели зубного ряда оператором выбирается одна или несколько виртуальных точек относительно виртуальной модели зубного ряда, через которую(ые) должна проходить виртуальная плоскость выравнивания.
Таким образом, речь может идти о выравнивании по одной точке, выравнивании по двум точкам, выравнивании по трем точкам и т.д. Одна или несколько точек могут располагаться, например, на задних молярах, например, первая точка может находиться на последнем моляре левой стороны рта, а вторая точка может находиться на последнем моляре правой стороны рта. Третья точка может находиться на средней линии центральных зубов или на одном из центральных зубов. Точки могут располагаться на нижней и/или верхней челюстях.
В некоторых вариантах осуществления изобретения один или несколько параметров являются базовыми параметрами, заданными по умолчанию.
В некоторых вариантах осуществления изобретения один или несколько параметров являются индивидуализированными параметрами пациента, полученными по результатам анализа пациента.
В некоторых вариантах осуществления изобретения виртуальная плоскость выравнивания является базовой плоскостью выравнивания.
В некоторых вариантах осуществления базовая плоскость выравнивания является предварительно заданной на базе стандартных величин.
В некоторых вариантах осуществления виртуальная плоскость выравнивания является индивидуализированной виртуальной плоскостью выравнивания, задаваемой на основе одного или нескольких параметров пациента.
В некоторых вариантах осуществления изобретения один или несколько параметров получаются на основе виртуальной модели зубного ряда.
Таким образом, размеры зубных дуг, челюстей, разности высот между зубами и т.д. могут быть получены из модели.
В некоторых вариантах осуществления изобретения один или несколько параметров основываются на данных одного или нескольких препарированных зубов, подлежащих восстановлению.
В некоторых вариантах осуществления изобретения один или несколько параметров являются положениями одного или нескольких препарированных зубов, направлением губной или щечной поверхности препарированных зубов, и/или направлением препарированных зубов вверх или вниз.
В некоторых вариантах осуществления изобретения один или несколько параметров основываются на горизонтальном и/или вертикальном расположении одного или нескольких зубов.
В некоторых вариантах осуществления изобретения один или несколько параметров являются положениями некоторого количества конкретных зубов.
В некоторых вариантах осуществления изобретения один или несколько параметров основываются на самой(ых) высокой(их) точке(ах) зубов в нижнечелюстной зубной дуге и/или верхнечелюстной зубной дуге.
В некоторых вариантах осуществления изобретения один конкретный параметр или несколько параметров являются точкой на моляре в левой части нижнечелюстной зубной дуги, точкой на моляре в правой части нижнечелюстной зубной дуги и точкой между центральными зубами нижнечелюстной зубной дуги.
Преимущество заключается в использовании этих точек в качестве параметров, которыми задается плоскость. Данные точки могут находиться, например, на дистально-щечном бугорке второго моляра в левой и в правой частях нижнечелюстной зубной дуги или нижней челюсти и на 1 мм ниже режущего края в промежутке между двумя центральными резцами нижнечелюстной зубной дуги или нижней челюсти. Данными точками задается плоскость, которая может быть определена как окклюзионная плоскость.
В некоторых вариантах осуществления изобретения один или несколько параметров охватывают следующие результаты измерения и/или следующие величины:
- угол сагиттального суставного пути;
- движение Беннетта;
- резцовое ведение;
- клыковое ведение;
- форма нижнечелюстных ямок;
- форма нижнечелюстных возвышений;
- положение верхних челюстей, продублированных относительно черепа; и/или
- настроечные параметры лицевой дуги.
Преимущество заключается в использовании одного или нескольких указанных параметров, так как они соответствуют областям механического артикулятора и, следовательно, дают возможность также вести настройку виртуального артикулятора.
В некоторых вариантах осуществления изобретения на плоскости выравнивания отображается типичный зубной ряд для удобства размещения плоскости выравнивания и виртуальной модели зубного ряда относительно друг друга.
В некоторых вариантах осуществления изобретения предоставляются средства вращения и перемещения плоскости выравнивания и/или виртуальной модели зубов.
В некоторых вариантах осуществления изобретения средства вращения и перемещения представляют собой виртуальные рукоятки.
В некоторых вариантах осуществления изобретения виртуальная плоскость выравнивания и/или виртуальный зубной ряд могут быть полупрозрачными или просвечивающими, причем виртуальная плоскость выравнивания и виртуальный зубной ряд видны одновременно.
Кроме того, физическая модель отпечатка верхних или нижних зубов может быть прикреплена к определенной пуансонной пластине, которая отвечает одновременно соответствующей матричной пластине в 3D-сканере и соответствующей матричной пластине в механическом артикуляторе. Следовательно, доступен перенос положений на модели между артикулятором и сканером. Определенные таким образом положения могут быть далее переданы в компьютерные программные средства, осуществляющие моделирование виртуального артикулятора и протезов. Они также могут являться определенными реперными метками на пуансонной пластине, на модели и т.д.
В некоторых вариантах осуществления изобретения виртуальная модель зубного ряда формируется при помощи внутриротового сканирования зубов, или сканирования отпечатка зубов, или сканирования физической модели зубов.
В некоторых вариантах осуществления изобретения способ включает регистрацию следа контактной поверхности и автоматическое вырезание зубного материала на основе расположения контактной поверхности.
Преимущество заключается в том, что виртуальное вырезание материала от моделируемых зубов может осуществляться на основе виртуального следа поверхности моделируемых точек контактов. Таким образом, не требуется последующее виртуальное удаление материала - материал удаляется в ходе имитационного моделирования.
Настоящее изобретение относится к различным аспектам, в том числе к способу, описанному выше и далее по тексту, а также к соответствующим способам, устройствам, системам, используемым средствам и/или продуктам, каждый(ая, -ое) из которых характеризуется одним или несколькими преимуществами или пользой, описанными в связи с первым упомянутым аспектом, и каждый(ая, -ое) из которых имеет один или несколько вариантов осуществления, описанных в связи с первым упомянутым аспектом и/или прилагаемыми пунктами формулы изобретения.
В частности, в данном документе предложена система виртуального артикулятора для имитационного моделирования окклюзии при выполнении автоматизированного проектирования одного или более стоматологических протезов для пациента, содержащая средства обеспечения виртуального артикулятора, содержащего виртуальную трехмерную модель верхней челюсти и виртуальную трехмерную модель нижней челюсти, повторяющие верхнюю челюсть и нижнюю челюсть пациента соответственно; средства обеспечения движений виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга для имитационного моделирования динамической окклюзии при возникновении контактов между зубами виртуальной верхней и виртуальной нижней челюстей, причем система включает средства предотвращения пересечения между собой виртуальной поверхности зубов виртуальной верхней челюсти и виртуальной поверхности зубов виртуальной нижней челюсти при указанных контактах.
Далее предложен компьютерный программный продукт, содержащий средства программного кода для осуществления способа системой обработки данных, причем указанные средства программного кода выполняются системой обработки данных; и компьютерный программный продукт, содержащий читаемый компьютером носитель информации, на котором хранятся средства выполнения программного кода.
Предложен способ использования динамического виртуального артикулятора для имитационного моделирования окклюзии при выполнении планирования ортодонтической обработки зубов пациента при помощи средств автоматизированного проектирования, реализуемый посредством компьютера, при этом способ включает следующее:
- обеспечение виртуального артикулятора, содержащего виртуальную трехмерную модель зубов, в которую входит верхняя челюсть, определяемая как виртуальная верхняя челюсть, и виртуальную трехмерную модель зубов, в которую входит нижняя челюсть, определяемая как виртуальная нижняя челюсть, повторяющие, соответственно, верхнюю челюсть и нижнюю челюсть пациента;
- обеспечение траектории движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга для имитационного моделирования динамической окклюзии при возникновении контактов между зубами виртуальной верхней и виртуальной нижней челюстей;
причем способ далее включает следующее:
- предотвращение пересечения виртуальной поверхности зубов виртуальной верхней челюсти и виртуальной поверхности зубов виртуальной нижней челюсти при контактах.
Преимущество заключается в том, что для планирования ортодонтического лечения пациента может применяться динамический виртуальный артикулятор, таким образом, может выполняться имитационное моделирование динамической окклюзии для ортодонтических целей.
В некоторых вариантах осуществления изобретения планирование ортодонтической обработки включает сегментирование зубов, коррекцию положения зубов и/или имитационное моделирование движения челюстей и зубов.
Таким образом, применение виртуального динамического артикулятора при планировании лечения позволяет осуществлять виртуальное сегментирование зубов, виртуальную коррекцию положения зубов, виртуальное имитационное моделирование движений и т.д.
Планирование лечения может включать предоставление пациентом реальной стоматологической ситуации и предоставление желаемой конечной стоматологической ситуации по итогам ортодонтического лечения, и затем применение способа динамической виртуальной артикуляции для исследования и имитационного моделирования конечной стоматологической ситуации на предмет соответствия желаемому результату.
При применении способа динамической виртуальной артикуляции в зубопротезировании часть моделируемого зуба, контактирующего с другим зубом, может быть автоматически вырезана для предотвращения контактов во рту пациента при реальной артикуляции, реальном кусании, реальном жевании и т.д.
С другой стороны, при применении способа динамической виртуальной артикуляции в зубопротезировании никакие части зубов не должны быть вырезаны, и только зуб, контактирующий с другим зубом, может быть перемещен, повернут, наклонен и т.п. в направлениях, соответствующих предотвращению нежелательного контакта в реальном прикусе пациента.
В некоторых вариантах осуществления изобретения способ включает регистрацию следа контактов, на основе чего планируется ортодонтическое лечение, например, коррекция положения различных зубов.
В некоторых вариантах осуществления изобретения способ включает приложение нагрузки к одному или нескольким зубам.
В некоторых вариантах осуществления изобретения по нагрузке, действующей на зуб, определяется, насколько положение зуба поддается коррекции.
В некоторых вариантах осуществления изобретения большая нагрузка указывает на то, что коррекция положения конкретного зуба противопоказана, малая нагрузка указывает на то, что коррекция положения зуба показана при любых условиях, средняя нагрузка указывает на то, что коррекция положения зуба допустима при соответствующих показаниях к лечению.
Преимущество заключается в том, что действие различных нагрузок на зубы позволяет контролировать и корректировать лечение, например, перемещение зуба, поскольку некоторые зубы могут иметь функцию или положение, которые играют важную роль, например, в конфигурации прикуса, поэтому данные зубы не должны подвергаться коррекции ни при каких условиях. При этом другие зубы, функция или положение которых не столь значимо в отношении функциональности и эстетического восприятия, могут подвергаться корректированию. На группу зубов, характеризуемую средней нагрузкой, может оказываться различная нагрузка в некотором диапазоне, и если при имитационном моделировании происходит нежелательный контакт двух зубов, то положение зуба, к которому приложена, например, минимальная нагрузка, следует скорректировать.
В некоторых вариантах осуществления изобретения два и более зуба могут объединяться в фиксированную группу, при этом два и более указанных зуба двигаются как единое целое.
Преимущество заключается в том, что зубы могут объединяться в фиксированные группы, при этом соблюдается требование, что, например, передние зубы должны оставаться неподвижными относительно друг друга.
В некоторых вариантах осуществления изобретения планирование обработки и имитационное моделирование окклюзии реализуется итеративным способом, при этом после каждого внесения изменения в план лечения производится имитационное моделирование окклюзии.
В некоторых вариантах осуществления изобретения накладываются ограничения на коррекцию положения одного или нескольких зубов.
В некоторых вариантах осуществления изобретения может выполняться моделирование ортодонтических аппаратов.
В некоторых вариантах осуществления изобретения может выполняться имитационное моделирование окклюзии пациента с моделируемыми ортодонтическими аппаратами.
В некоторых вариантах осуществления изобретения моделирование аппаратов реализуется итеративным способом, при этом после каждого внесения изменения в аппарат производится имитационное моделирование окклюзии.
В некоторых вариантах осуществления изобретения аппараты для верхней челюсти и аппараты для нижней челюсти моделируются параллельно.
В некоторых вариантах осуществления изобретения ортодонтические аппараты могут представлять собой скобы, брекеты (от англ. brackets - скобы), окклюзионные шины, ретейнеры (от англ. retain - сохранять), проволочные дуги, элайнеры (от англ. align - выравнивать) и/или каппы.
В некоторых вариантах осуществления изобретения аппараты могут удерживать зубы в их естественном положении.
В некоторых вариантах осуществления изобретения аппараты могут предотвращать стачивание зубов пациента.
В некоторых вариантах осуществления изобретения аппараты могут предотвращать храп пациента во время сна.
В некоторых вариантах осуществления изобретения аппараты могут предназначаться для комфортного ношения.
В некоторых вариантах осуществления изобретения производится имитационное моделирование конкретного зубного ряда, при этом один или несколько спроектированных аппаратов по выбору включаются в процесс имитационного моделирования.
В некоторых вариантах осуществления изобретения в один или несколько спроектированных аппаратов вносятся изменения на основе данных имитационного моделирования окклюзии.
В некоторых вариантах осуществления изобретения в один или несколько спроектированных аппаратов вносятся изменения с учетом их положения и анатомических особенностей.
В некоторых вариантах осуществления изобретения виртуальный артикулятор может сохранять верхнюю и нижнюю модели в открытом положении.
Преимущество заключается в том, что модели зубов в виртуальном артикуляторе могут удерживаться в открытом положении, так как в некоторых ортодонтических случаях требуется разработка аппаратов, удерживающих верхнюю и нижнюю челюсти в открытом положении на некотором расстоянии друг от друга, чтобы оставалась возможность повторного моделирования прикуса. При размещении моделей в открытом положении в виртуальном артикуляторе могут разрабатываться данные аппараты, формирующие требуемое расстояние между зубами. Таким образом, при помощи виртуального артикулятора может проектироваться аппарат, обеспечивающий подъем и раскрытие прикуса.
Дальнейшее преимущество заключается в том, что протез также может проектироваться при открытом положении верхней и нижней моделей в виртуальном артикуляторе.
В некоторых вариантах осуществления изобретения зубы в виртуальном артикуляторе промаркированы при помощи цветовой кодировки для обозначения контакта между зубами.
В некоторых вариантах осуществления изобретения при имитационном моделировании окклюзии производится регистрация последовательных отметок времени событий.
В некоторых вариантах осуществления изобретения на основе имитационного моделирования окклюзии формируется окклюзионный компас.
В некоторых вариантах осуществления изобретения окклюзионный компас, сформированный по фактической динамической окклюзии пациента, переносится на динамический виртуальный артикулятор.
В некоторых вариантах осуществления изобретения окклюзионный компас показывает движения в следующих направлениях:
- протрузия;
- ретрузия;
- латеротрузия вправо;
- латеротрузия влево;
- медиотрузия вправо;
- медиотрузия влево;
- латероресюртрузия вправо;
- латероресюртрузия влево.
В некоторых вариантах осуществления изобретения окклюзионный компас выделяет различные направления движения разными цветами зубов.
Окклюзионный компас бугорка зуба имеет трехмерную структуру и отражает суммирование перемещений бугорка зуба во всех трех плоскостях движения. На окклюзионном компасе имеются возвышения и впадины, и для каждого конкретного бугорка окклюзионный компас может отличаться от окклюзионных компасов других бугорков в зависимости от центров вращения нижней челюсти. Таким образом, преимущество состоит в применении окклюзионных компасов, так как различным пациентам подходит разная морфология окклюзионной поверхности. Следовательно, применение окклюзионных компасов позволяет проектировать морфологию и функциональные протезы в соответствии с особенностями конкретного пациента.
В некоторых вариантах осуществления изобретения в одной или нескольких частях зубов регистрируются окклюзионные силы.
В некоторых вариантах осуществления изобретения окклюзионные силы в одной или нескольких частях зубов регистрируются с течением времени.
В некоторых вариантах осуществления изобретения окклюзионные силы регистрируются посредством электронного датчика для измерения окклюзионной силы.
В некоторых вариантах осуществления изобретения информация о зарегистрированных окклюзионных силах передается в динамический виртуальный артикулятор.
Преимущество заключается в использовании электронного датчика для регистрации окклюзионной силы, например, датчика T-Scan III компании Tekscan, при помощи которого можно определить окклюзионные силы во рту пациента и электронным способом передать полученную информацию в динамический виртуальный артикулятор для использования в имитационном моделировании динамической окклюзии. Использование результатов измерения окклюзионных сил позволяет усовершенствовать динамическую виртуальную артикуляцию и имитационное моделирование прикуса пациента.
В некоторых вариантах осуществления изобретения производится имитационное моделирование окклюзионной силы.
Имитационное моделирование осуществляется при помощи программных средств посредством, например, виртуального артикулятора.
В некоторых вариантах осуществления изобретения производится визуализация зарегистрированной и/или смоделированной окклюзионной силы.
В некоторых вариантах осуществления изобретения формируются биофизическая модель функциональности челюстей и окклюзионная сила.
В некоторых вариантах осуществления изобретения данные результатов измерения окклюзионной силы записываются посредством электронного компонента, расположенного во рту пациента.
В некоторых вариантах осуществления изобретения данные результатов измерения окклюзионной силы передаются в динамический виртуальный артикулятор и накладываются на динамический виртуальный артикулятор.
В некоторых вариантах осуществления изобретения формируется томографический скан рта пациента, и на основе данного скана автоматически формируется виртуальная 3D-модель рта пациента, а также задаются параметры окклюзии для имитационного моделирования окклюзии на основе томографической 3D-модели.
В некоторых вариантах осуществления изобретения по томографическому скану получаются данные о положении и/или размерах мышц челюстей, на основе чего может проводиться имитационное моделирование окклюзионной силы.
В некоторых вариантах осуществления изобретения в виртуальный артикулятор передается томографический скан всего черепа или части черепа пациента.
В некоторых вариантах осуществления изобретения на основе томографического скана формируются ограничения параметров имитационного моделирования окклюзии.
В некоторых вариантах осуществления изобретения на томографическом скане визуализируются один или несколько корней зубов, а также для имитационного моделирования движения зубов используются данные о положениях корней зубов.
В некоторых вариантах осуществления изобретения в виртуальный артикулятор передается двухмерное изображение пациента.
В некоторых вариантах осуществления изобретения на основе данных о прикладываемой к зубу нагрузке определяется его функциональная значимость при направлении окклюзии пациента.
В некоторых вариантах осуществления изобретения большая нагрузка указывает на то, что конкретный зуб важен для направления окклюзии.
В некоторых вариантах осуществления изобретения малая нагрузка указывает на то, что конкретный зуб не важен для направления окклюзии.
В некоторых вариантах осуществления изобретения средняя нагрузка указывает на среднюю степень важности конкретного зуба для направления окклюзии.
В некоторых вариантах осуществления изобретения к центральным резцам и/или клыкам прикладывается большая нагрузка.
Преимущество заключается в приложении большой нагрузки к центральным резцам и/или клыкам в верхней и/или нижней челюстях, так как данные зубы часто являются самыми важными для направления окклюзии ввиду своей наибольшей длины по сравнению с остальными зубами. Таким образом, поскольку данные зубы важны для направления окклюзии, предпочтительно их не двигать, не укорачивать, не удалять, не протезировать и т.п. ввиду того, что любое изменение этих зубов может негативно повлиять на окклюзию.
В некоторых вариантах осуществления изобретения производится имитационное моделирование окклюзии конкретного ряда зубов, при этом в имитационное моделирование выборочно включаются один или несколько спроектированных протезов.
В некоторых вариантах осуществления изобретения один или несколько протезов изменяются на основе имитационного моделирования окклюзии.
В некоторых вариантах осуществления изобретения один или несколько протезов изменяются с учетом положения и/или анатомических особенностей.
В некоторых вариантах осуществления изобретения виртуальный артикулятор применяется при проектировании частичного съемного протеза пациента для имитационного моделирования окклюзии.
Чрезмерная высота протеза, например, небольшое возвышение над соседним зубом, представляет проблему, так как она может привести к искажению прикуса пациента и/или разрушению протеза. Таким образом, желательно, чтобы препарированный зуб во рту пациента находился ниже или был короче соседних зубов.
Обычно, при ручном моделировании протезов зубной техник вручную немного выдвигает препарированный зуб в отлитой модели и затем формирует протез.
При виртуальном проектировании или моделировании протеза при помощи программных средств обычно виртуальная нижняя модель и виртуальная верхняя модель виртуально перемещаются таким образом, чтобы они накладывались, после чего разрабатывается протез. Это возможно благодаря тому, что модели являются виртуальными и, следовательно, допускают проникновение друг в друга в виртуальном трехмерном пространстве при типовом программном моделировании.
В некоторых вариантах осуществления изобретения перед проектированием протеза для препарированного зуба препарированный зуб в виртуальной 3D-модели перемещается на некоторое расстояние от своего фактического положения относительно соседних зубов и/или своего положения в десне.
В этом заключается преимущество, так как при проектировании протеза на перемещенном препарированном зубе, протез может быть сформирован на одном уровне с соседними зубами, и при возврате препарированного зуба с протезом на свое прежнее место в виртуальной 3D-модели протез будет ниже или короче соседних зубов, а реальный протез на реальном препарированном зубе во рту пациента будет, таким образом, также ниже или короче соседних зубов, причем протез, являющийся более хрупким, нежели реальный зуб, может быть лучше защищен от контактов с другими зубами или с пищей и т.п. Расстояние, на которое перемещается препарированный зуб, может измеряться в миллиметрах, микронах и т.д. Расстояние может измеряться по вертикали.
Согласно настоящему изобретению, виртуальное моделирование осуществляется аналогично традиционной ручной работе, так как происходит замена препарированного зуба вместо перемещения моделей для осуществления их наложения.
Преимущество заключается в том, что при проектировании протеза он может не контактировать с зубом, а может формироваться межокклюзионное расстояние, такое как увеличенное межокклюзионное расстояние. Межокклюзионное расстояние представляет собой расстояние между окклюзионными поверхностями зубов верхней и нижней челюстей, и в этой связи межокклюзионное расстояние может быть определено как расстояние между протезом и противостоящими зубами.
В некоторых вариантах осуществления изобретения перед проектированием протеза на имплантате или промежуточных коронок в мосту на месте отсутствующих зубов часть десны, соответствующая положению отсутствующего зуба в виртуальной 3D-модели, перемещается на некоторое расстояние от своего фактического положения.
Преимущество заключается в том, что для защиты протеза на имплантате, промежуточных коронок и т.д. от контактов и т.п. высота имплантата, коронки на имплантате, промежуточных коронок и т.п. меньше высоты соседних зубов.
В некоторых вариантах осуществления изобретения для имитационного моделирования окклюзии задаются и используются один или несколько критериев контактов.
В некоторых вариантах осуществления изобретения критерии контактов охватывают следующее:
- контактировать друг с другом должны определенные зубы;
- контактировать друг с другом должно максимальное количество зубов;
- в контакте должна находиться максимальная площадь поверхностей зубов;
- определенные зубы не должны контактировать;
- необходимо получить максимальное количество точек контактов;
- точки контактов должны быть в пространственном отношении равномерно распределены по поверхности зубов; и/или
- точки контактов между зубами во время определенных окклюзионных движений не должны расходиться дальше, чем на некоторое расстояние.
Критерии контактов могут использоваться для анализа, корректировки и усовершенствования модели виртуального артикулятора, например, геометрической и/или физической модели виртуального артикулятора.
Параметры модели виртуального артикулятора могут автоматически оптимизироваться, регулироваться, корректироваться, задаваться, определяться и т.д. посредством имитационного моделирования движения челюстей в артикуляторе, при этом имитационное моделирование может обуславливаться моделью виртуального артикулятора.
Например, оператор может довольно часто корректировать угол сагиттального суставного пути, который в большинстве случаев является важным параметром.
Оптимизация окклюзии при помощи параметров и критериев контактов позволяет улучшить качество окклюзии по сравнению с реальной физиологической окклюзией пациента.
Например, при наличии ошибок или неточностей в данных об окклюзии пациента, полученных при применении механического артикулятора, лицевой дуги и т.п., окклюзия может быть скорректирована при использовании параметров и критериев контактов.
Кроме того, предложена система динамического виртуального артикулятора для имитационного моделирования окклюзии при выполнении автоматизированного проектирования одного или более стоматологических протезов для пациента, содержащая средства обеспечения виртуального артикулятора, содержащего виртуальную трехмерную модель зубов, в которую входит верхняя челюсть, определяемая как виртуальная верхняя челюсть, и виртуальную трехмерную модель зубов, в которую входит нижняя челюсть, определяемая как виртуальная нижняя челюсть, повторяющие, соответственно, верхнюю челюсть и нижнюю челюсть пациента; средства обеспечения движений виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга для имитационного моделирования динамической окклюзии при возникновении контактов между зубами виртуальной верхней и виртуальной нижней челюстей, причем система включает средства предотвращения пересечения между собой виртуальной поверхности зубов виртуальной верхней челюсти и виртуальной поверхности зубов виртуальной нижней челюсти при указанных контактах.
Кроме того, предложена система для использования динамического виртуального артикулятора для имитационного моделирования окклюзии при выполнении планирования ортодонтической обработки зубов пациента при помощи средств автоматизированного проектирования, содержащая средства обеспечения виртуального артикулятора, содержащего виртуальную трехмерную модель зубов, в которую входит верхняя челюсть, определяемая как виртуальная верхняя челюсть, и виртуальную трехмерную модель зубов, в которую входит нижняя челюсть, определяемая как виртуальная нижняя челюсть, повторяющие, соответственно, верхнюю челюсть и нижнюю челюсть пациента; средства обеспечения движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга для имитационного моделирования динамической окклюзии при возникновении контактов между зубами виртуальной верхней и виртуальной нижней челюстей, причем система включает средства предотвращения пересечения между собой виртуальной поверхности зубов виртуальной верхней челюсти и виртуальной поверхности зубов виртуальной нижней челюсти при указанных контактах.
Кроме того, предложен стоматологический протез, спроектированный согласно настоящему способу.
Кроме того, предложен ортодонтический аппарат для применения при планировании ортодонтической обработки, причем аппарат спроектирован согласно настоящему способу.
Краткое описание чертежей
Вышеуказанные и/или дополнительные объекты, особенности и преимущества настоящего изобретения далее разъяснены посредством последующих иллюстрационных материалов и ничем не ограничиваемого подробного описания вариантов осуществления настоящего изобретения со ссылками на нижеследующие прилагаемые чертежи.
Фиг.1 показывает блок-схему способа.
Фиг.2 показывает примеры виртуальных артикуляторов.
Фиг.3 показывает пример движений челюстей для имитационного моделирования окклюзии.
Фиг.4 показывает пример моделирования восстановленного зуба.
Фиг.5 показывает схематическое изображение перемещения вдоль окклюзионной оси.
Фиг.6 показывает пример виртуальной модели зубного ряда.
Фиг.7 показывает пример виртуальной окклюзионной плоскости.
Фиг.8 показывает первый пример виртуальной окклюзионной плоскости и виртуальной модели перед регулировкой их взаимного расположения.
Фиг.9 показывает второй пример виртуальной окклюзионной плоскости и виртуальной модели в процессе регулировки их взаимного расположения.
Фиг.10 показывает пример виртуальной окклюзионной плоскости и виртуальной модели после регулировки их взаимного расположения.
Фиг.11 показывает пример виртуального артикулятора.
Фиг.12 показывает пример блок-схемы варианта осуществления изобретения.
Фиг.13 показывает пример движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга.
Фиг.14 показывает пример перемещения препарированного зуба для проектирования протеза.
Фиг.15 показывает пример перемещения десенной части для проектирования протеза.
Фиг.16 показывает пример окклюзионного компаса.
Фиг.17 показывает пример воспроизведения записи движений челюстей.
Фиг.18 показывает пример моделирования протеза с вводом поправки на контакты с противостоящими зубами.
Фиг.19 показывает примеры виртуальных артикуляторов, соответствующих физическим артикуляторам различных производителей.
Фиг.20 показывает пример виртуального артикулятора, существующего только в виртуальном виде.
Фиг.21 показывает примеры следов после движения.
Фиг.22 показывает пример виртуального имитационного моделирования процесса планирования ортодонтической обработки.
Фиг.23 показывает пример виртуального имитационного моделирования процесса стоматологической коррекции.
Фиг.24 показывает пример ортодонтического аппарата для коррекции зубов.
Осуществление изобретения
Ниже приведено описание со ссылками на соответствующие фигуры, которые иллюстрируют вариант осуществления изобретения.
На фиг.1 показан пример блок-схемы, иллюстрирующей стадии программно реализованного способа применения динамического виртуального артикулятора для имитационного моделирования окклюзии при выполнении автоматизированного проектирования одного или нескольких стоматологических протезов для пациента.
На стадии 101 предоставляется виртуальный артикулятор, включающий виртуальную трехмерную модель верхней челюсти и виртуальную трехмерную модель нижней челюсти, повторяющие, соответственно, верхнюю челюсть и нижнюю челюсть пациента.
На стадии 102 предоставляется движение виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга для имитационного моделирования динамической окклюзии при возникновении контактов между зубами виртуальной верхней и виртуальной нижней челюстей.
На стадии 103 обеспечивается недопустимость пересечения виртуальной поверхности зубов виртуальной верхней челюсти и виртуальной поверхности зубов виртуальной нижней челюсти при контактах.
На фиг.2 показаны примеры виртуальных артикуляторов.
На фиг.2а показана виртуальная верхняя челюсть 204 с зубами 206 и виртуальная нижняя челюсть 205 с зубами 206. Шесть зубов 207 в верхней челюсти 204 были восстановлены, при этом для имитационного моделирования движений челюстей 204, 205 и контроля правильного расположения зубов 207 во рту пациента применяется виртуальный артикулятор 208. Виртуальный артикулятор 208 обозначен двумя осями: окклюзионной осью 209 и осью 210 латеротрузии-медиотрузии. Челюсти 204, 205 двигаются вверх и вниз вдоль окклюзионной оси 209, челюсти 204, 205 также совершают движения вдоль оси 210 латеротрузии-медиотрузии, соответствующие отклонению нижней челюсти от срединно-сагиттальной плоскости кнаружи и к срединно-сагиттальной плоскости вправо и влево. Движения челюстей 204, 205 также могут соответствовать протрузии, при которой обе суставные головки смещаются вперед, и ретрузии, при которой обе суставные головки смещаются назад. Оси, вдоль которых совершаются данные движения, на фигуре не приведены.
На фигуре показано только движение вдоль окклюзионной оси 209, при этом движения вдоль оси 210 латеротрузии-медиотрузии и вдоль оси протрузии-ретрузии (не показана) не совершается. В окне 211, расположенном в левой верхней части фигуры, также отображаются параметр «occlusion» (окклюзия), значение которого равно 6,60, параметр «laterotrusion» (латеротрузия), значение которого равно 0,00, и параметр «pro-/retrusion» (про-/ретрузия), значение которого равно 0,00. Возможны следующие различные направления движения:
- протрузия;
- ретрузия;
- латеротрузия вправо;
- латеротрузия влево;
- медиотрузия вправо;
- медиотрузия влево;
- латероресюртрузия вправо;
- латероресюртрузия влево.
На фиг.2b показан другой виртуальный артикулятор 208 с возможностью настройки конфигурации осей 209, 210 для управления движением челюстей 204, 205 вдоль окклюзионной оси, оси латеротрузии-медиотрузии, оси протрузии-ретрузии и т.д. Выемки 240 указывают на место, в котором зубным техником будет установлена базовая окклюзионная плоскость в виде резиновой ленты.
На фиг.3 показан пример движений челюстей для имитационного моделирования окклюзии. В обеих челюстях 204, 205 имеются неизмененные зубы 206, а в верхней челюсти 204 также имеются восстановленные зубы 207. Движения предназначены для имитационного моделирования процессов, позволяющих судить об оптимальности конфигурации восстановленных зубов 207 при расположении их во рту.
На фиг.3 показаны челюсти 204, 205 в первом положении, причем ни один из зубов 206 в челюстях 204, 205 не контактирует с восстановленными зубами 207.
На фиг.3b показаны челюсти 204, 205 во втором положении, причем челюсти 204, 205 ближе подведены друг к другу, при этом контакт между зубами 207 и восстановленными зубами 207 отсутствует.
На фиг.3с показаны челюсти 204, 205 в третьем положении, причем челюсти 204, 205 подведены друг к другу еще ближе.
На фиг.3d показаны челюсти 204, 205 в третьем положении с эллипсом 212 в точке 213, в которой имеется контакт между зубами челюстей 204, 205. Контакт имеется между восстановленным зубом 207а в верхней челюсти 204 и зубом 206а в нижней челюсти 205.
На фиг.4 показан пример моделирования восстановленного зуба.
На фиг.4а показаны верхняя челюсть 204 с восстановленным зубом 207а, развернутая на 180° относительно положения, указанного на предыдущих фигурах, другой восстановленный зуб 207 и неизмененный зуб 206. Восстановленный зуб 207а находился в контакте с зубом в нижней челюсти, как показано на фиг.3d, и на зубе 207а указаны точки 214 контактов. Затемнения в точках контактов могут указывать на глубину проникновения или давление, с которым при контакте взаимодействуют зуб 207а и зуб в нижней челюсти. Таким образом, затемнение от светлого к темному соответствует изображению глубины или давлению, причем более слабое затемнение обозначает небольшую глубину или малое давление, а более сильное затемнение обозначает большую глубину или сильное давление.
Кроме того, зубы могут не быть совершенно жесткими, вместо этого они могут быть несколько податливыми и, следовательно, при контакте друг с другом могут немного продавливаться или деформироваться. Таким образом, виртуальные зубы могут не быть совершенно твердыми, вместо этого они могут быть несколько податливыми или эластичными и, следовательно, при контакте друг с другом виртуальные зубы могут немного продавливаться или деформироваться.
На фиг.4b показано то же самое, что и на фиг.4а, а также приведены инструменты для моделирования восстановленного зуба 207а. Ввиду того, что зуб 207а контактирует с зубом в нижней челюсти, как показано на фиг.3d, восстановленный зуб 207а может моделироваться таким образом, чтобы он не контактировал с зубом в нижней челюсти. Для моделирования зуб 207а может быть перемещен или перетащен в левую или в правую стороны, указанные инструментами 215, а также перемещен вверх и вниз, как указано инструментами 216. При моделировании зуба 207а к нему могут также перемещаться или перетаскиваться точки с левой стороны или с правой стороны, указанные инструментами 217, кроме того, зуб 207а может перемещаться в сторону соседних зубов при помощи инструментов 218.
При перемещении или перетаскивании зуба 207а точки 214 контактов изменяются в соответствии с данными изменениями формы зуба, и зуб 207а далее может моделироваться таким образом, чтобы не было контакта с зубами в нижней челюсти, а точки 214 контактов затем исчезли с зуба 207а, указывая, таким образом, что при моделировании зуба 207а отсутствуют контакты с противостоящими зубами. На фиг.5 показано схематическое изображение перемещения вдоль окклюзионной оси.
На фигуре показана верхняя челюсть 204 с зубами 206 и нижняя челюсть 205 с зубами 206. Некоторые из этих зубов могут быть восстановленными зубами, и, следовательно, может быть исследована окклюзия.
Показанная верхняя челюсть 204 зафиксирована с изображенной окклюзионной осью 209. Нижняя челюсть 205 может двигаться относительно верхней челюсти 204 и, следовательно, нижняя челюсть может вращаться вокруг окклюзионной оси 209. Таким образом, при помощи виртуального артикулятора проводится исследование контактов и анализ ответного действия вдоль окклюзионной оси 209, например, для любой заданной конфигурации остальных степеней свободы, то есть остальных осей, см. фиг.2, и, следовательно, находится первое положение на окклюзионной оси, в котором между двумя моделями челюстей имеется контакт. Это уменьшает порядок вычислительной задачи и позволяет использовать более специализированные поисковые структуры, предназначенные для расчета первой точки пересечения с SD-моделью по заданной круговой траектории 219 вокруг неподвижной окклюзионной оси 209 вращения. Таким образом, для каждой стадии движения вдоль одной из остальных осей, то есть для всех остальных степеней свободы, могут быть рассчитаны моменты времени и точки контакта зубов 206 в челюстях 204, 205 вдоль окклюзионной оси. На фиг.6 показан пример виртуальной модели зубного ряда. Виртуальная модель 601 зубного ряда пациента содержит виртуальную нижнечелюстную зубную дугу 602 и виртуальную верхнечелюстную зубную дугу/челюсть 603. Шесть передних зубов 604 в верхнечелюстной дуге 603 отмечены другим цветом по отношению к остальным зубам 605 зубного ряда. Шесть зубов 604 могут являться зубами, подлежащими восстановлению или восстановленными. Виртуальная модель 601 может быть показана в графическом пользовательском интерфейсе, в котором оператор, например, зубной техник или дантист, может проектировать, выполнять имитационное моделирование и/или моделировать, например, протезы для пациента.
На фиг.7 показан пример виртуальной окклюзионной плоскости. Окклюзионная плоскость 706 показана плоской круглой поверхностью, однако следует понимать, что окклюзионная плоскость может иметь любую форму. Окклюзионная плоскость представляет собой плоскость, проходящую через окклюзионные или кусающие поверхности зубов, и выражает среднюю величину кривизны окклюзионной поверхности. Таким образом, окклюзионная плоскость может быть ровной или волнистой, соответствующей разным высотам зубов.
На окклюзионной плоскости 706 показан контур типичного зубного ряда 707 для облегчения поиска в трехмерном пространстве подходящего положения окклюзионной поверхности 706 относительно виртуальной модели.
Виртуальный артикулятор 708 обозначен двумя осями: окклюзионной осью 709 и осью 710 латеротрузии-медиотрузии. Верхнечелюстная и нижнечелюстная зубные дуги виртуальной модели могут двигаться вверх и вниз вдоль окклюзионной оси 709, а также дуги могут совершать движения вдоль оси 710 латеротрузии-медиотрузии, соответствующие отклонению нижней челюсти от срединно-сагиттальной плоскости кнаружи и к срединно-сагиттальной плоскости вправо и влево. Движения дуг также могут соответствовать протрузии, при которой обе суставные головки смещаются вперед, и ретрузии, при которой обе суставные головки смещаются назад. Оси, вдоль которых совершаются данные движения, на фигуре не приведены.
Возможны следующие различные направления движения:
- протрузия;
- ретрузия;
- латеротрузия вправо;
- латеротрузия влево;
- медиотрузия вправо;
- медиотрузия влево;
- латероресюртрузия вправо;
- латероресюртрузия влево.
На фиг.8 показан первый пример виртуальной окклюзионной плоскости и виртуальной модели перед корректировкой их взаимного расположения.
Окклюзионная плоскость 806 с типичным зубным рядом 807 и виртуальная модель нижнечелюстной зубной дуги 802 показаны совместно. Окклюзионная плоскость 806 наклонена относительно виртуальной модели нижнечелюстной зубной дуги 802, при этом окклюзионная плоскость 806 и виртуальная модель нижнечелюстной зубной дуги 802 пересекаются по линии 811 пересечения.
На фиг.9 показан второй пример виртуальной окклюзионной плоскости и виртуальной модели в процессе корректировки их взаимного расположения.
Окклюзионная плоскость 906 с типичным зубным рядом 907 и виртуальная модель нижнечелюстной зубной дуги 902 показаны совместно. Окклюзионная плоскость 906 и виртуальная модель нижнечелюстной зубной дуги 902 почти выровнены, так как имеют одинаковые или почти одинаковые углы наклона, однако окклюзионная плоскость 906 и виртуальная модель нижнечелюстной зубной дуги 902 все еще пересекаются по линии 911 пересечения, так как некоторые зубы в нижнечелюстной зубной дуге 902 немного выступают над окклюзионной плоскостью 906. Окклюзионная плоскость 906 и виртуальная модель нижнечелюстной зубной дуги 902 еще не выровнены по горизонтали, так как типичный зубной ряд 907 на окклюзионной плоскости 906 не соответствует положению зубов нижнечелюстной зубной дуги 902.
На фиг.10 показан пример виртуальной окклюзионной плоскости и виртуальной модели после корректировки их взаимного расположения.
Окклюзионная плоскость 1006 с типичным зубным рядом 1007 и виртуальная модель нижнечелюстной зубной дуги 1002 показаны совместно. Окклюзионная плоскость 1006 и виртуальная модель нижнечелюстной зубной дуги 1002 выровнены, так как имеют одинаковые углы наклона, а окклюзионная плоскость 1006 и виртуальная модель нижнечелюстной зубной дуги 1002 пересекаются по линии 1011 пересечения, так как некоторые зубы в нижнечелюстной зубной дуге 1002 немного выступают над окклюзионной плоскостью 1006. Окклюзионная плоскость 1006 и виртуальная модель нижнечелюстной зубной дуги 1002 выровнены по горизонтали, так как типичный зубной ряд 1007 на окклюзионной плоскости 1006 соответствует положению зубов нижнечелюстной зубной дуги 1002. Выравнивание может производиться по трем точкам, то есть для выравнивания могут использоваться три точки.
На фиг.11 показан пример виртуального артикулятора.
Виртуальный артикулятор 1108 представляет собой виртуальный вариант физического, механического устройства, используемого в зубоврачебной практике, к которому прикреплены формы верхних и нижних зубов и который воспроизводит зарегистрированные положения нижних зубов относительно верхних зубов. Артикулятор может регулироваться по следующим параметрам: угол сагиттального суставного пути, движение Беннетта, резцовое и клыковое ведение, форма нижнечелюстных ямок и нижнечелюстных возвышений. Артикулятор может воспроизводить естественные движения нижней челюсти во время жевания. Артикулятор может регулироваться для воспроизведения различных движений и положений нижних зубов относительно верхних зубов согласно записи параметров рта. Таким образом, виртуальный артикулятор может выполнять все движения и т.п., которые выполняются механическим артикулятором.
Виртуальный артикулятор 1108 содержит нижнюю опору 1109, на которой может располагаться виртуальная модель нижних зубов или нижняя челюсть, верхнюю опору 1110, на которой может располагаться виртуальная модель верхних зубов или верхняя челюсть. Различные виртуальные соединительные, скользящие и регулировочные приспособления 1111 соответствуют соединительным, скользящим и прочим регулировочные приспособлениям механического артикулятора, в котором могут регулироваться разные вышеупомянутые области согласно анатомическим особенностям конкретного пациента.
На фиг.12 показан пример блок-схемы варианта осуществления изобретения.
На стадии 1201 запускается движение виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга.
На стадии 1202 регистрируются все контакты при движении виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга.
На стадии 1203 регистрируется движение виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга.
На стадии 1204 моделируются все области протезов с зарегистрированными точками контактов.
На фиг.13 показан пример движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга.
На фиг.13а показано первое положение верхней челюсти 1304 и нижней челюсти 1305, совершающих движение. В нижней челюсти и в верхней челюсти имеются зубы 1306, а верхняя челюсть содержит несколько протезов 1307.
На фиг.13b показано положение челюстей в процессе их движения. Верхняя челюсть 1304 двигается относительно нижней челюсти 1305, а протез 1307 контактирует с зубом 1306, о чем свидетельствует точка контакта 1314, охватывающая область контакта.
На фиг.13с показано конечное положение челюстей по окончании их движения, на всех зубах и протезах отмечены все точки контактов. После этого может моделироваться протез 1307 путем виртуального удаления материала из протеза или его реструктурирования, чтобы исключить контакт в точке 1314 при повторном виртуальном или фактическом (во рту пациента) перемещении челюстей относительно друг друга.
На фиг.14 показан пример перемещения препарированного зуба для проектирования протеза.
На фиг.14а показан пример трехмерного изображения зубного ряда 1400, причем зуб 1401 препарирован для установки протеза, например, коронки. Также показаны два соседних зуба 1402. Показаны корни 1403 зуба, а также часть 1404 десны. Изображение корней 1403 зубов может быть получено путем компьютерной томографии или может быть экстраполировано по обычному трехмерному скану. Трехмерное изображение корней 1403 зубов не является обязательным, так как при проектировании протеза не требуется информация о корнях зуба, однако оно может способствовать упрощению процесса проектирования протеза.
На фиг.14b показан препарированный зуб 1401, перемещенный в вертикальном направлении относительно своего положения в десне 1404 и относительно соседних зубов для уменьшения расстояния до противостоящего зуба при проектировании протеза.
На фиг.14с показан протез 1405, выполненный в форме коронки, установленный на препарированный зуб, причем препарированный зуб перемещен в вертикальном направлении относительно его положения в десне 1404 и относительно соседних зубов. Таким образом, протез спроектирован для иной окклюзии, нежели нормальная окклюзия. Показано, что верхний край протеза 1405 при проектировании находится на одном уровне с верхними краями двух соседних зубов 1402.
На фиг.14а показана ситуация, при которой препарированный зуб 1401 с протезом 1405 установлен в свое исходное фактическое положение после проектирования протеза 1405. Ввиду того, что при проектировании протеза 1405 он был перемещен вровень с соседними зубами 1402, после возврата в свое исходное положение протез 1405 короче соседних зубов 1402. Таким образом, протез, установленный во рту пациента, будет короче соседних зубов, при этом достигается лучшая защита протеза, являющегося более хрупким, чем настоящие зубы.
На фиг.15 показан пример перемещения десенной части для проектирования протеза.
На фиг.15а показан пример трехмерного изображения зубного ряда 1500, в котором отсутствует зуб в области части 1506 десны. Отсутствующий зуб может быть сломанным, выпавшим, удаленным при лечении и т.п. Протез предназначен для замещения отсутствующего зуба в области 1506. Показаны соседние зубы 1502, указаны корни 1503 зуба, а также часть 1504 десны. Изображение корней 1503 зубов может быть получено путем компьютерной томографии или может быть экстраполировано по обычному трехмерному скану. Трехмерное изображение корней 1503 зубов не является обязательным, так как при проектировании протеза не требуется информация о корнях зуба, однако оно может способствовать упрощению процесса проектирования протеза.
Протезом, предназначенным для замещения отсутствующего зуба, может являться мост. Мост может содержать промежуточные коронки на месте отсутствующего зуба и две коронки для соседних зубов 1502.
На фиг.15b показаны два препарированных соседних зуба 1501. Область части десны 1506 отсутствующего зуба перемещается в вертикальном направлении относительно своего исходного положения в десне.
На фиг.15с показан протез, выполненный в форме моста. На месте отсутствующего зуба расположена промежуточная коронка 1507, а на двух препарированных зубах 1501 установлены полнофункциональные коронки 1505. Промежуточная коронка прикреплена к полнофункциональным коронкам. Промежуточная коронка проектируется при перемещении области части 1506 десны относительно своего исходного положения. Показано, что верхний край промежуточной коронки 1405 находится, фактически, на одном уровне с верхними краями спроектированных коронок 1505, установленных на двух соседних препарированных зубах 1501.
На фиг.15d показана ситуация, при которой область части 1506 десны с промежуточной коронкой 1507 установлена в свое исходное фактическое положение после проектирования промежуточной коронки 1507. Ввиду того, что при проектировании промежуточной коронки 1507 она была перемещена вровень с коронками 1505 соседних зубов, после возврата в свое исходное положение промежуточная коронка 1507 короче коронок 1505 соседних зубов. Таким образом, промежуточная коронка, установленная во рту пациента, будет короче коронок соседних зубов, при этом достигается лучшая защита промежуточной коронки, являющейся более хрупкой, чем коронки соседних зубов.
На фиг.16 показан пример окклюзионного компаса.
Окклюзионный компас показывает движения при динамической окклюзии в следующих направлениях:
- протрузия;
- ретрузия;
- латеротрузия вправо;
- латеротрузия влево;
- медиотрузия вправо;
- медиотрузия влево;
- латероресюртрузия вправо;
- латероресюртрузия влево.
Окклюзионный компас выделяет контакты при различных направлениях движения разными цветами. Цвета могут соответствовать международной схеме цветной маркировки. Окклюзионный компас, применяемый при виртуальном имитационном моделировании, является уникальным цифровым инструментом.
На фиг.17 показан пример воспроизведения записи движений челюстей.
Предварительно сделанная запись движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга может быть воспроизведена для анализа моделей до и/или после моделирования протеза. Также может быть воспроизведена предварительно заданная последовательность перемещений.
На фиг.18 показан пример моделирования протеза с вводом поправки на контакты с противостоящими зубами.
При движении виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга регистрируются контакты, отмеченные на протезе, и окклюзия, а после окончания движения выполняется моделирование точек контактов протеза.
На фиг.19 показаны примеры виртуальных артикуляторов, соответствующих физическим артикуляторам различных производителей.
На фиг.19а показан пример артикулятора компании KaVo.
На фиг.19b показан пример артикулятора компании SAM.
На фиг.19с показан пример артикулятора компании Denar.
На фиг.19d показан пример артикулятора компании Denar с окклюзионной плоскостью, расположенной на виртуальной модели зубов.
На фиг.20 показан пример виртуального артикулятора, существующего только в виртуальном виде.
На фиг.20а показан артикулятор компании 3Snape. Данный артикулятор существует только в виртуальном виде.
На фиг.20b показан артикулятор компании 3Snape с окклюзионной плоскостью, расположенной на виртуальной модели зубов.
На фиг.21 показаны примеры следов после движения.
На фиг.21а показан пример первой точки 2114 контакта между неизмененным зубом 2106 и другим неизмененным зубом или протезом 2107 в момент времени t1.
На фиг.21b показан пример последующей точки 2114 контакта между неизмененным зубом 2106 и другим неизмененным зубом или протезом 2107 в момент времени t2.
На фиг.21с показан пример другой последующей точки 2114 контакта между неизмененным зубом 2106 и другим неизмененным зубом или протезом 2107 в момент времени t3.
На фиг.21d показан след после движения другого неизмененного зуба или протеза 2107 и зуба 2106 в три момента времени: t1, t2, t3.
След после движения между зубом 2106 и другим неизмененным зубом или протезом 2107 обозначен линией 2120 с указателем направления. Поверхность точек 2114 контактов может выражаться движением следа, движением поверхности следа и т.д.
Таким образом, при имитационном моделировании движений неизмененных зубов относительно друг друга их следы движения или их поверхности не могут пересекаться. То же самое может касаться протеза, перемещающегося относительно неизмененного зуба.
Тем не менее, в ином случае справедливо, что при имитационном моделировании движения протеза и неизмененного зуба относительно друг друга поверхность движения протеза может проникать в неизмененный зуб.
Таким образом, термины «поверхность контактов», «след точек контактов» или «поверхность точек контактов» используются для описания обоих случаев: имитационного моделирования перемещения неизмененных зубов относительно друг друга и контакта зубов без взаимопроникновения, а имитационного моделирования перемещения протеза и неизмененных зубов относительно друг друга с возможным взаимопроникновением протезов и неизмененных зубов.
Имитационное моделирование контактов или поверхностей контактов между неизмененными зубами может определять движение, которое возможно между моделями верхних и нижних зубов.
Данное определенное движение может быть затем проанализировано и использовано при проектировании протеза.
На фиг.21е показан след 2120 после движения протеза 2107 и зуба 2106 в четыре момента времени t1, t2, t3, t4. При этом движение также производится до момента времени t1, между моментами времени t1-t2, t2-t3, t3-t4, а также после момента времени t4.
На фиг.21е показано, что протез 2107 и зуб 2106 проникают друг в друга при движении.
Поверхность контакта или точек проникновения может соответствовать траектории 2120 движения следа.
Показано, что зуб 2106 движется относительно протеза 2107, однако ситуация может быть противоположной, то есть протез 2107 может перемещаться относительно зуба 2106.
На фиг.22 показан пример виртуального имитационного моделирования процесса планирования ортодонтической обработки.
На фиг.22а показана виртуальная ортодонтическая модель зубов, предназначенная для имитационного моделирования окклюзии, в которую входят верхняя модель 2204 и нижняя модель 2205 в виртуальном артикуляторе 2208. Посредством имитационного моделирования окклюзии в виртуальном артикуляторе можно обнаруживать и анализировать аномалии окклюзии, а также осуществлять и/или планировать ортодонтическое лечение. Ортодонтическая обработка может также применяться исключительно в косметических целях для коррекции зубов пациента с целью улучшения их эстетичности.
На фиг.22b показано увеличенное изображение зубов в виртуальных моделях 2204, 2205, причем при имитационном моделировании окклюзии регистрируются области контактов или точки 2214 контактов. Обнаруженные области контактов или точки 2214 контактов могут использоваться для планирования ортодонтической обработки зубов пациента.
На фиг.23 показан пример виртуального имитационного моделирования процесса стоматологической коррекции.
На фиг.23а показана виртуальная модель 2304 верхних зубов до ортодонтической обработки, причем зубы 2307 расположены не эстетично. На зубах показаны области контактов или точек 2314 контактов, обнаруженные или зарегистрированные в виртуальном артикуляторе.
На фиг.23b показан пример виртуальной модели 2304 верхних зубов с рекомендуемым конечным результатом, достигаемым при коррекции зубов 2307.
По изображению, приведенному на фиг.23b, пациент может принять решение о целесообразности проведения коррекции зубов для формирования эстетичного ряда передних зубов.
На фиг.24 показан пример ортодонтического аппарата для коррекции зубов. На фиг.24а показаны виртуальная верхняя модель 2404 и виртуальная нижняя модель 2405, причем на зубах верхней модели 2404 установлен ортодонтический аппарат 2430 в виде окклюзионной шины. Данный физический аппарат может применяться для лечения синдрома дисфункции височно-нижнечелюстного сустава. Аппарат 2430 может быть виртуально спроектирован при помощи виртуального артикулятора, например, изображенного на фиг.22а.
На фиг.24b показан вид сверху аппарата 2430, установленного на виртуальной модели 2404 зубов.
На фиг.24с показан перспективный вид аппарата 2430, установленного на виртуальной модели 2404 зубов.
На фиг.24d показан вид снизу аппарата 2430.
Изображения, иллюстрирующие конструкцию аппарата, приведенные на фигурах 24, любезно предоставлены итальянской компанией Tridentestense Ortodonzia S.r.I.
Настоящее изобретение не ограничивается некоторыми описанными и подробно изображенными вариантами его осуществления, настоящее изобретение может также быть осуществлено в других вариантах в рамках объекта изобретения, определенного в нижеприведенной формуле изобретения. В частности, подразумевается, что могут быть использованы другие варианты осуществления изобретения и могут быть внесены структурные и функциональные изменения без выхода за рамки настоящего изобретения.
В формуле изобретения приведен перечень нескольких средств, причем некоторые из этих средств могут быть осуществлены одним и тем же аппаратным блоком. Сам факт того, что некоторые действия перечислены в различных взаимозависимых пунктах формулы или описаны в различных вариантах осуществления, не указывает на то, что сочетание этих действий не может быть полезным.
Следует отметить, что слова «включает(ют)», «включающий(ая, -ее, -ие)», «содержит(ат)», «содержащий(ая, -ее, -ие)», используемые в данном описании, указывают на наличие заявленных признаков, целочисленных значений, стадий или компонентов, но не исключают наличия или добавления одного или нескольких других признаков, целочисленных значений, стадий, компонентов или групп из такового.
При ссылке пункта формулы на один из предшествующих пунктов следует понимать, что имеется в виду любой или несколько любых предшествующих пунктов.
Признаки вышеописанного способа в дальнейшем могут быть применены в программных средствах и могут распространяться на систему обработки данных или иное обрабатывающее средство, запущенное выполнением инструкций, отрабатываемых компьютером. В качестве инструкций могут выступать средства программных кодов, загруженные в память, например, ОЗУ, с носителя информации или с другого компьютера, подключенного к вычислительной сети. В ином случае описанные признаки могут быть применены аппаратно подключенной схемой без использования программных средств или в сочетании с программными средствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ использования динамического виртуального артикулятора для имитационного моделирования окклюзии при выполнении проектирования стоматологических протезов для пациента и носитель информации | 2017 |
|
RU2652014C1 |
| Способ протезирования при полном отсутствии зубов с использованием имплантатов | 2022 |
|
RU2784297C1 |
| Цифровая окклюзионная шина | 2018 |
|
RU2692993C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРАЛЬНОГО СООТНОШЕНИЯ ЧЕЛЮСТЕЙ | 2006 |
|
RU2321375C1 |
| Способ комплексной реабилитации пациентов с частичной утратой зубов и симптомами дисфункций височно-нижнечелюстного сустава, проблем окклюзии и лицевых болей | 2021 |
|
RU2778839C1 |
| Способ и система автоматизированного моделирования ортотика | 2021 |
|
RU2758752C1 |
| Способ определения и фиксации центрального соотношения челюстей при изготовлении встречных окончательных протезов, опирающихся на дентальные имплантаты, при полном отсутствии зубов | 2020 |
|
RU2741862C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ОПТИМАЛЬНОЙ ВЫСОТЫ НИЖНЕЙ ТРЕТИ ЛИЦА ПРИ ГЕНЕРАЛИЗОВАННОЙ ПАТОЛОГИЧЕСКОЙ СТИРАЕМОСТИ ЗУБОВ ВТОРОЙ И ТРЕТЬЕЙ СТЕПЕНИ | 2021 |
|
RU2770110C1 |
| Способ устранения дистальной окклюзии зубных рядов | 2024 |
|
RU2825047C1 |
| Способ цифрового моделирования базиса и прикусного валика на верхнюю челюсть с формированием протетической плоскости | 2023 |
|
RU2822015C1 |
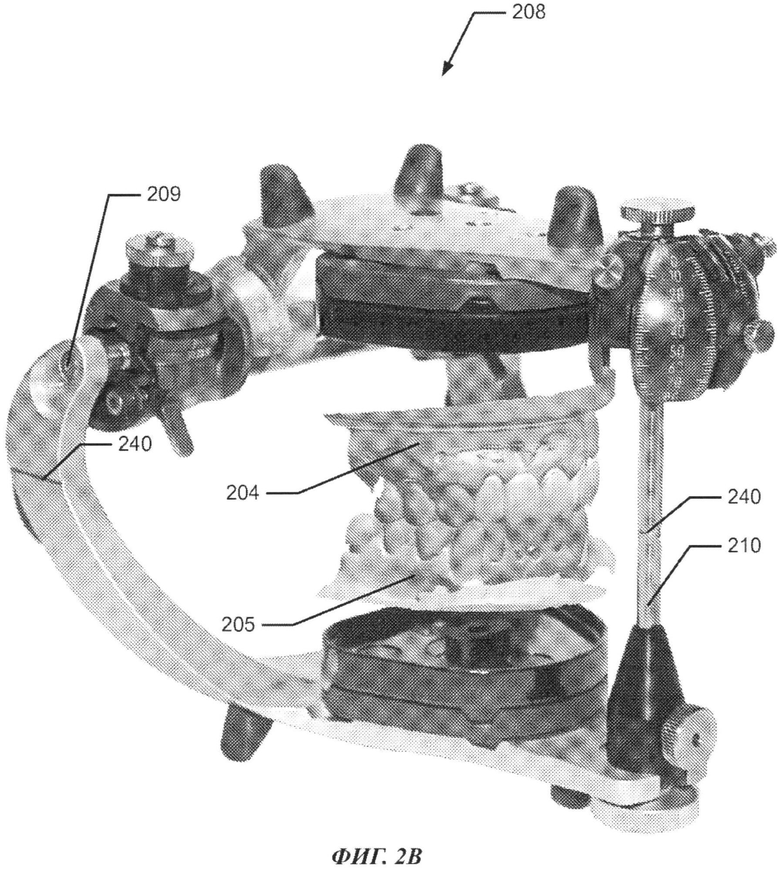


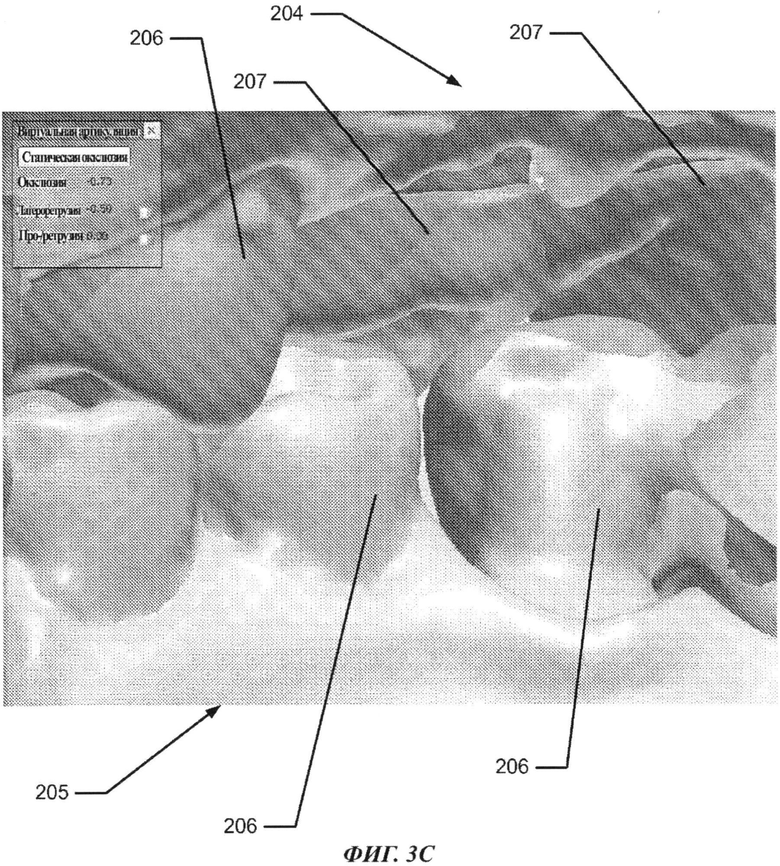
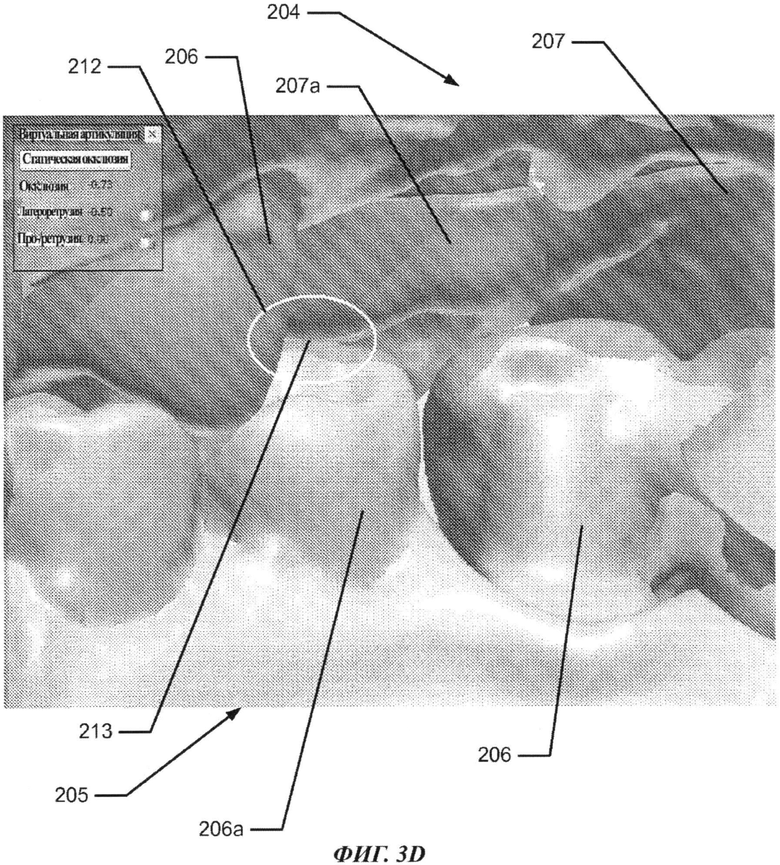
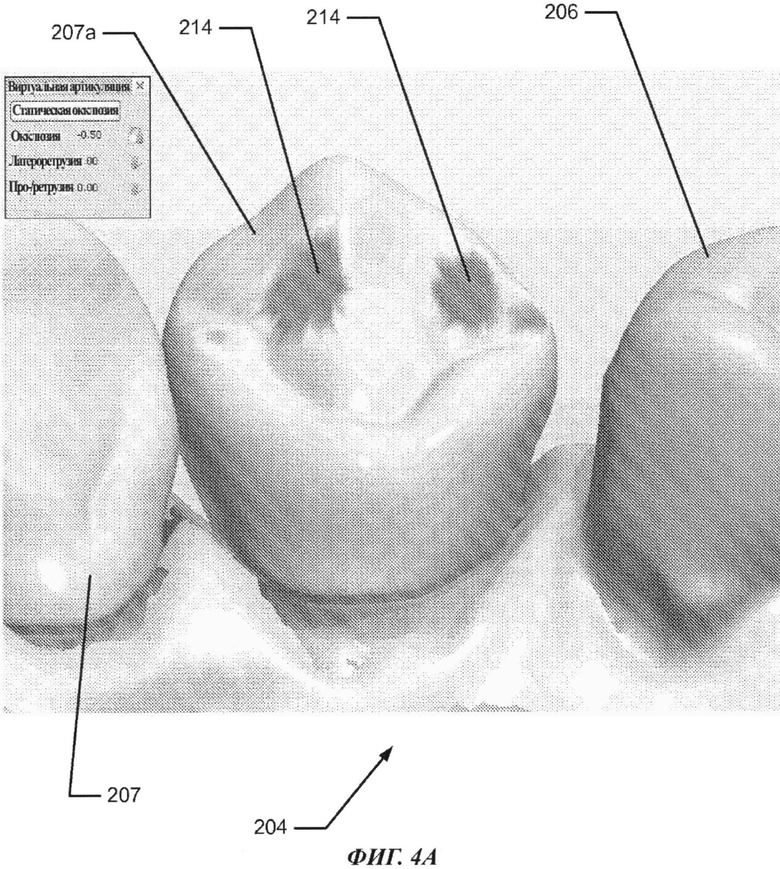
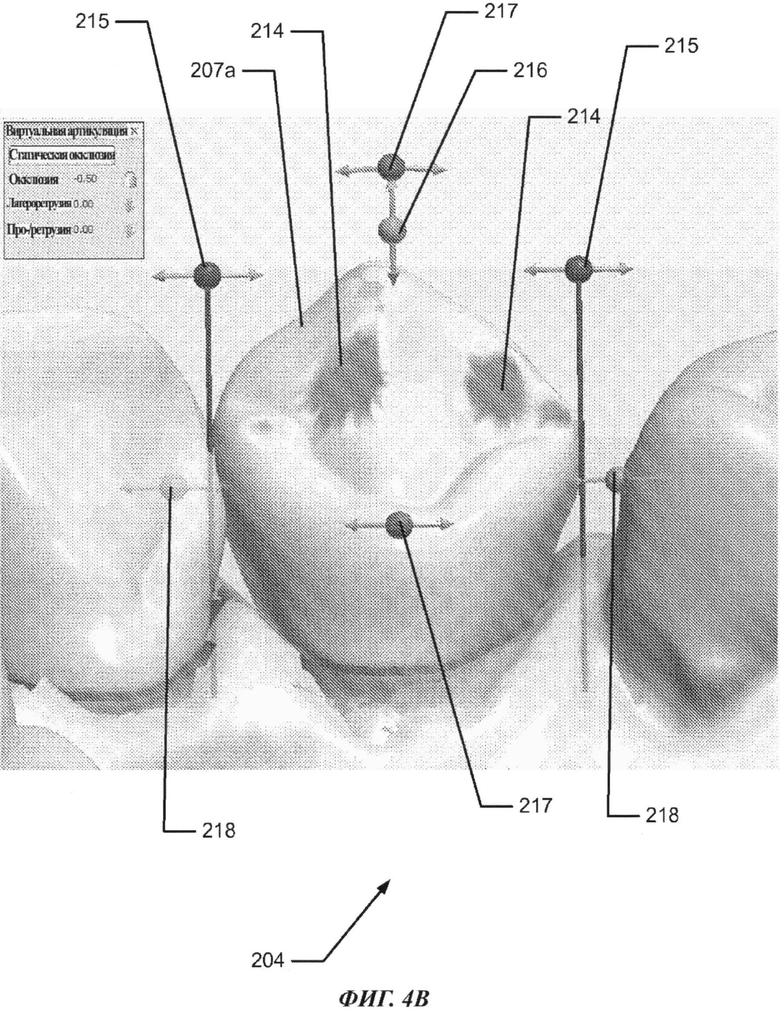

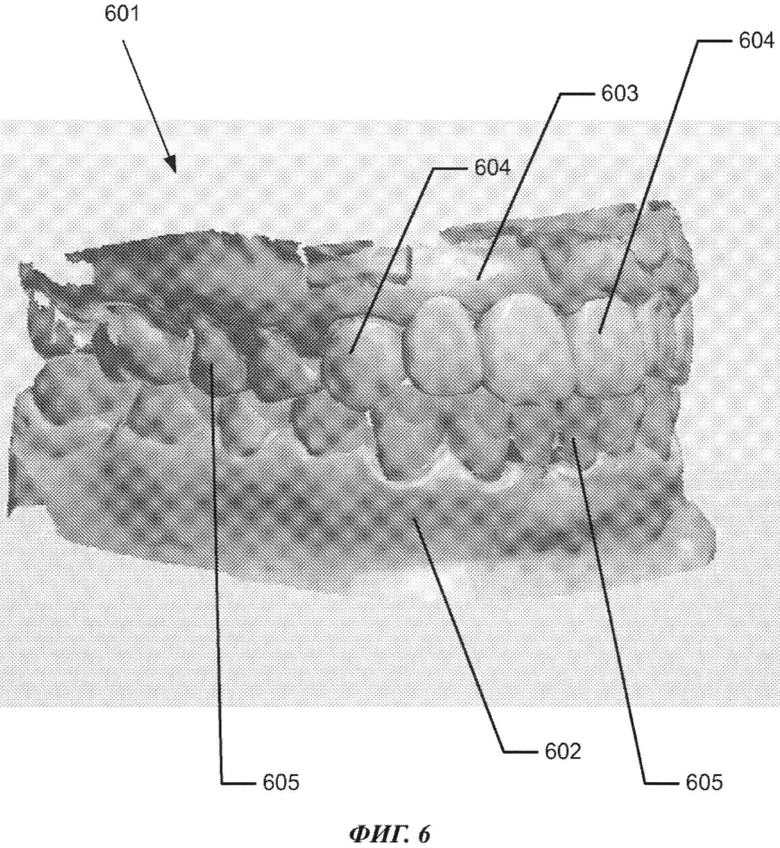
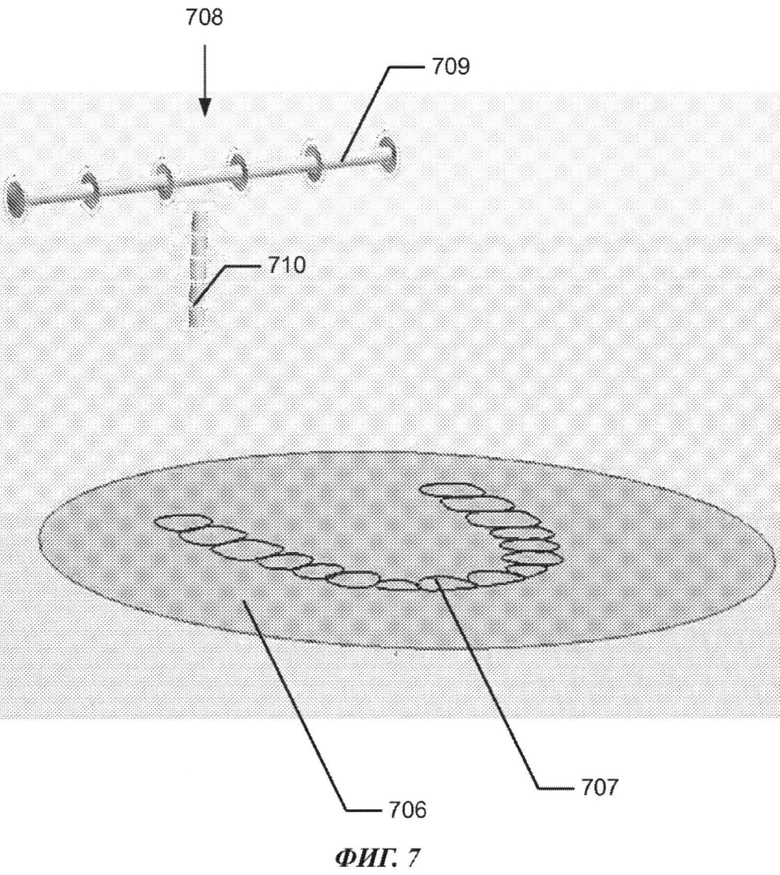
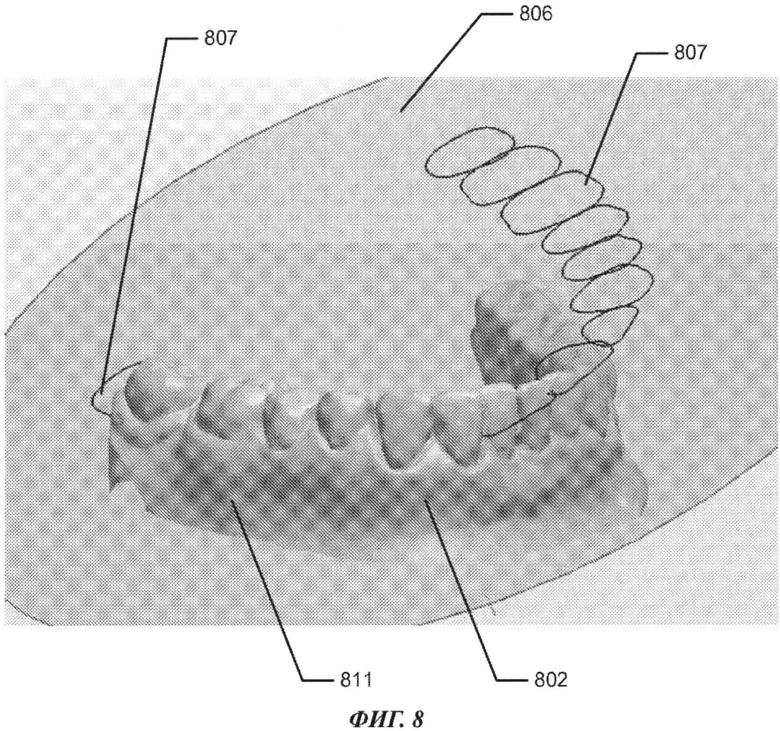
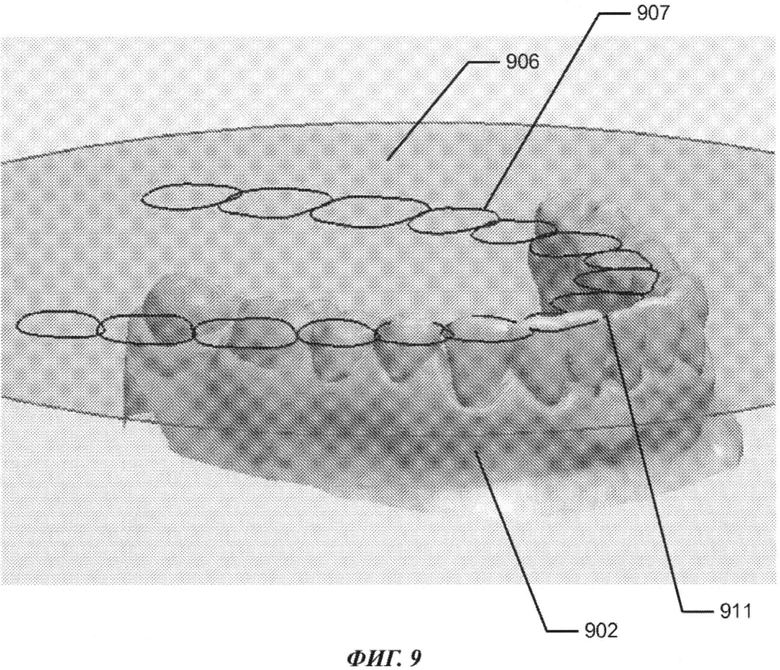
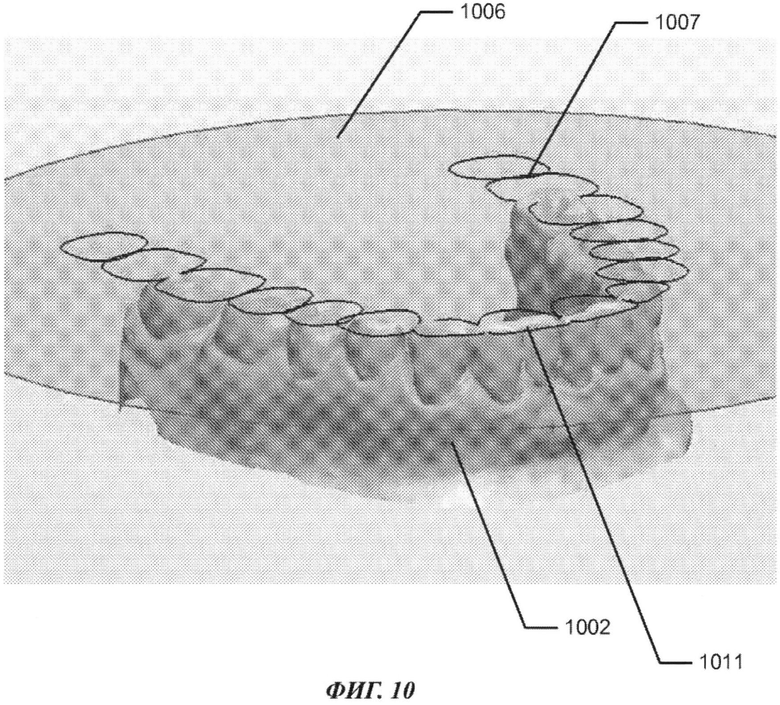
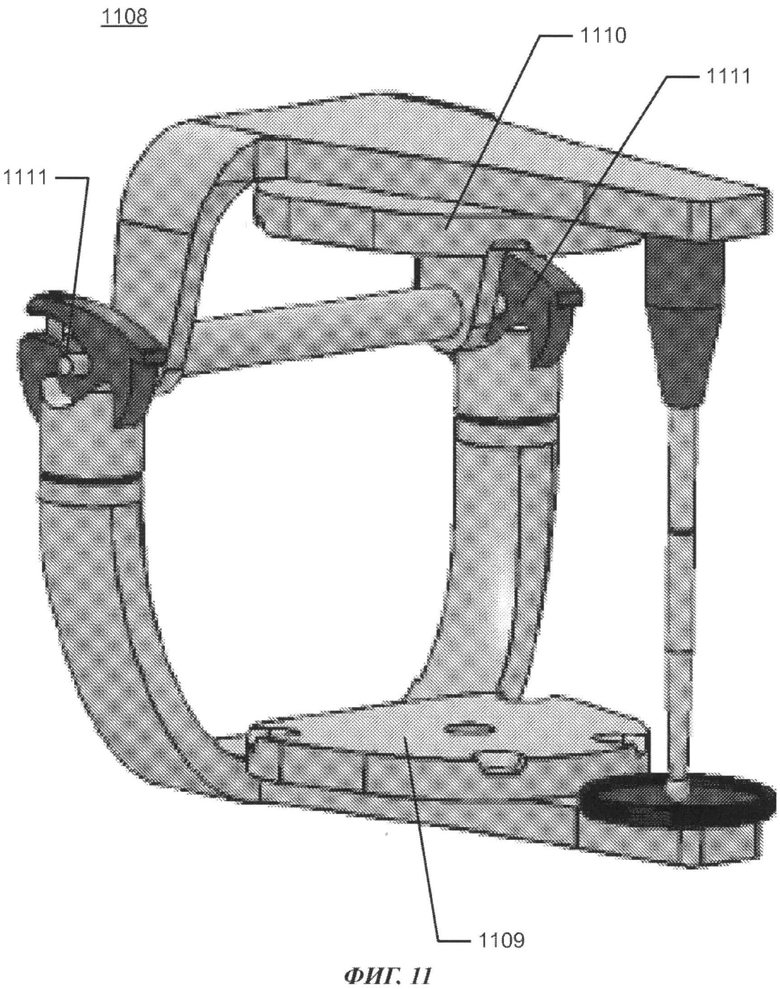


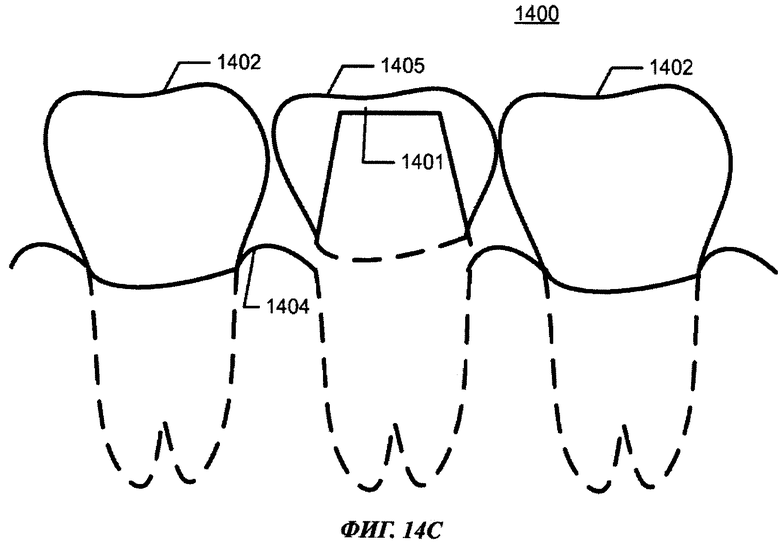

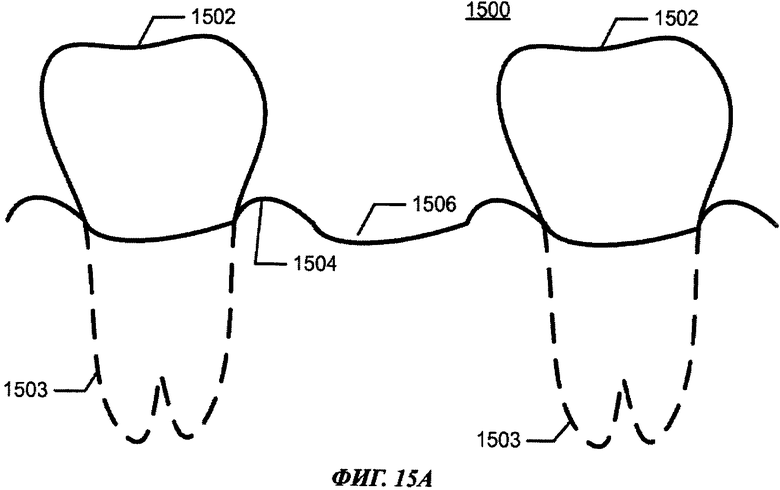
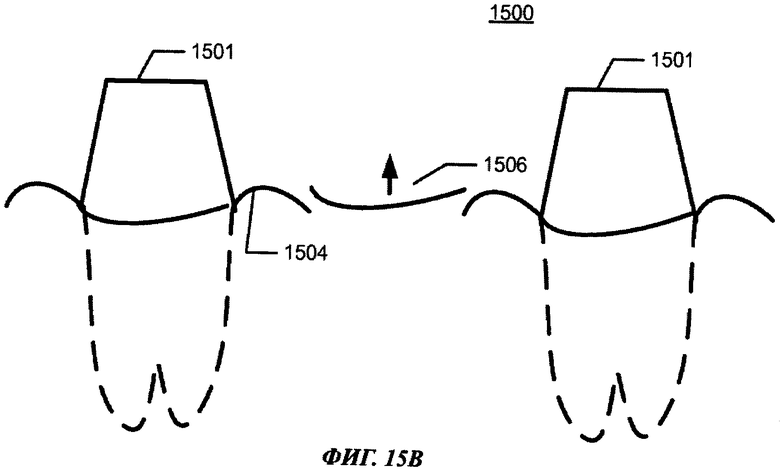
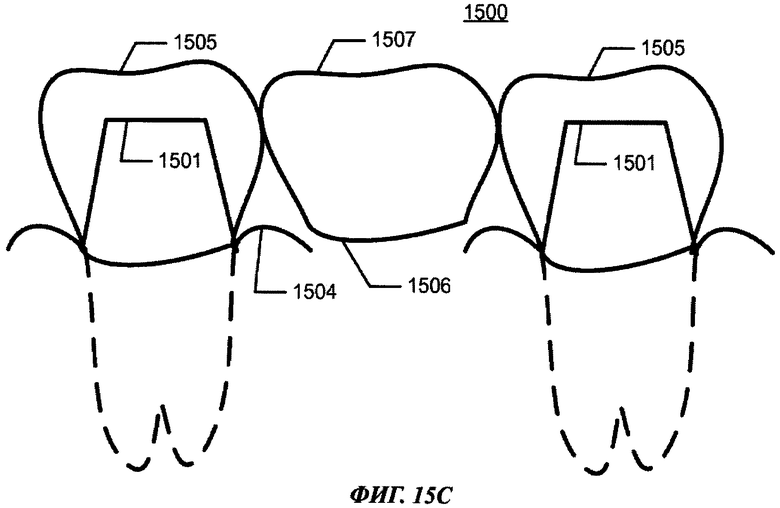
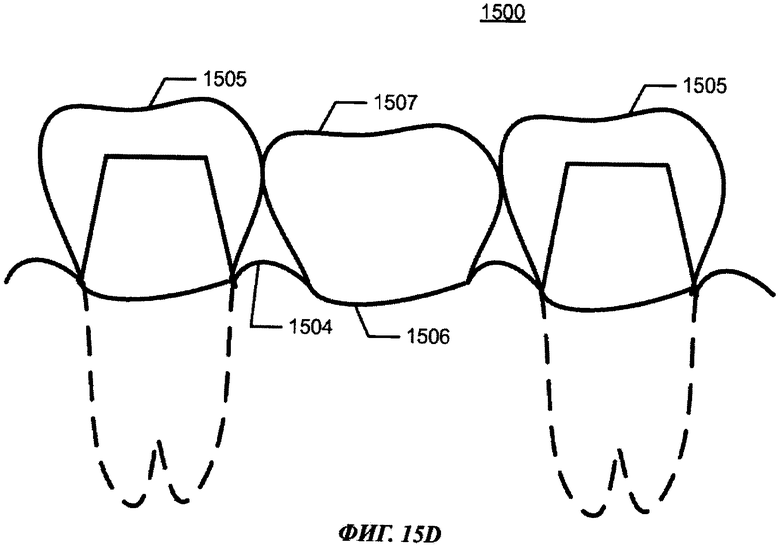

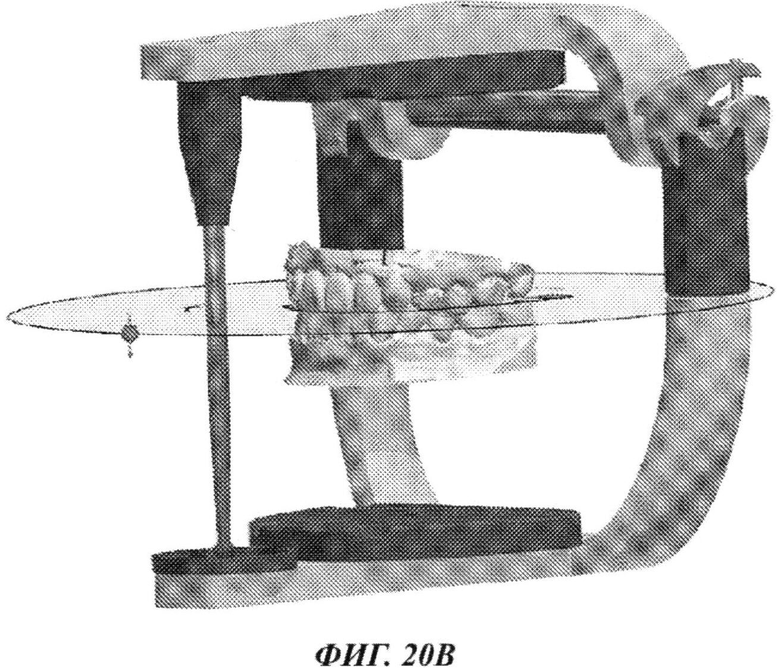
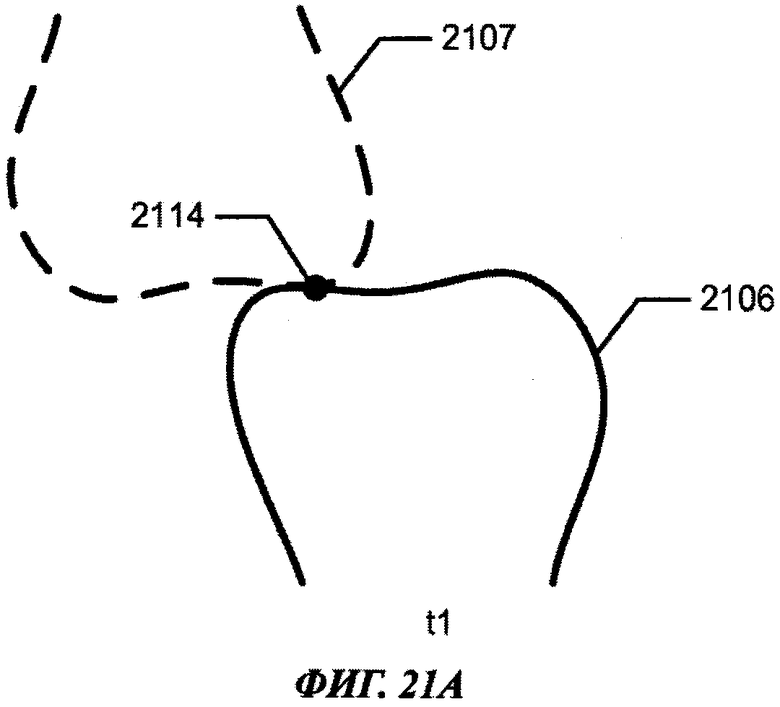
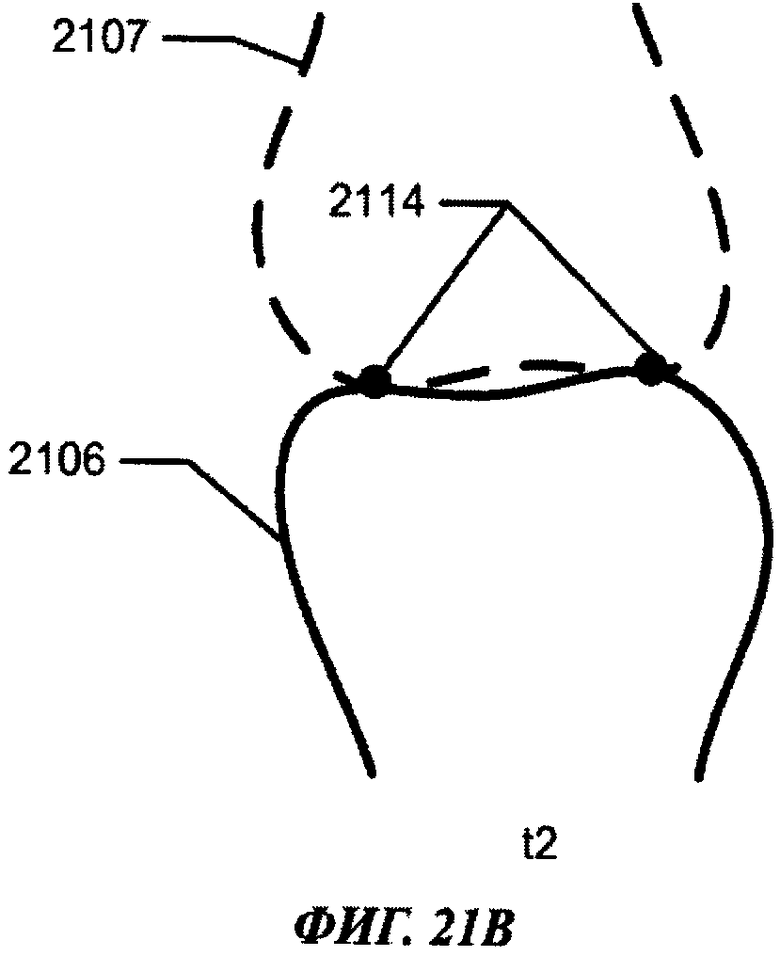
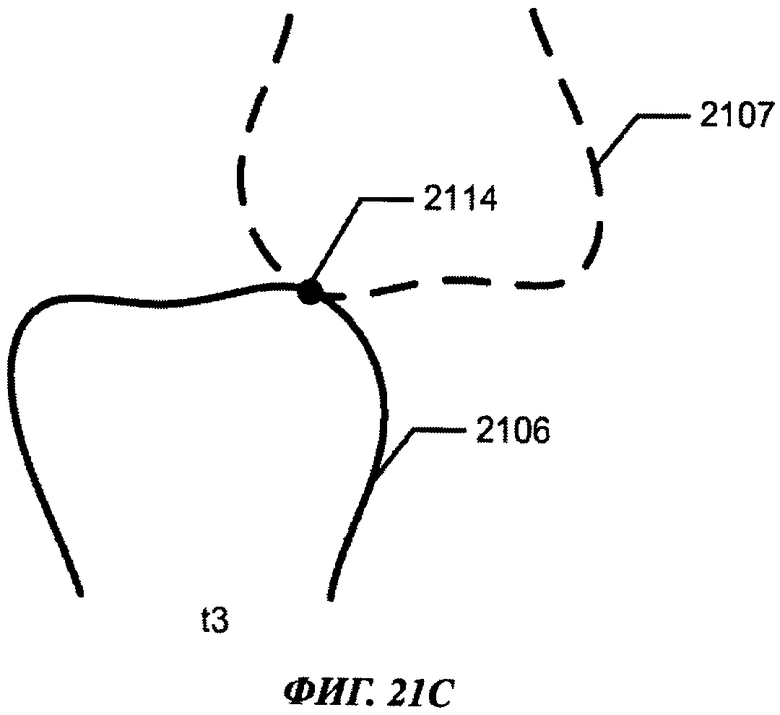
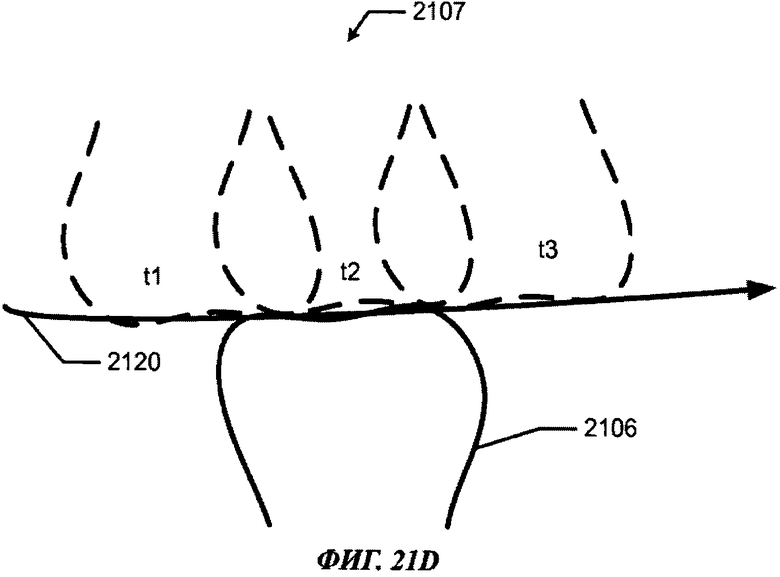
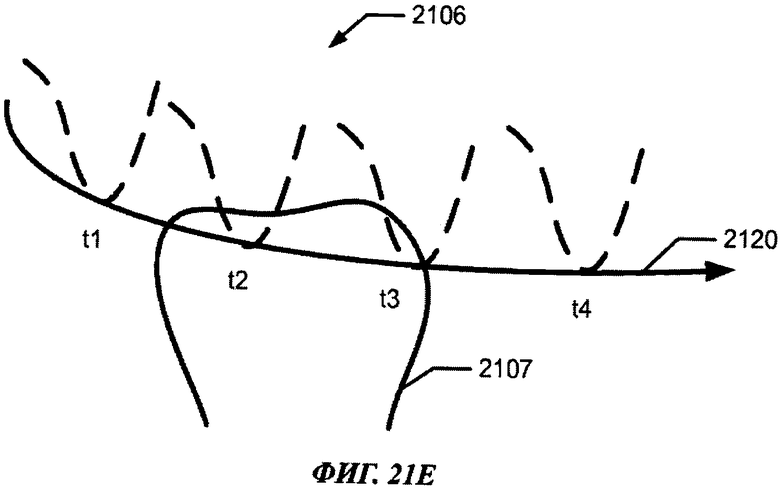

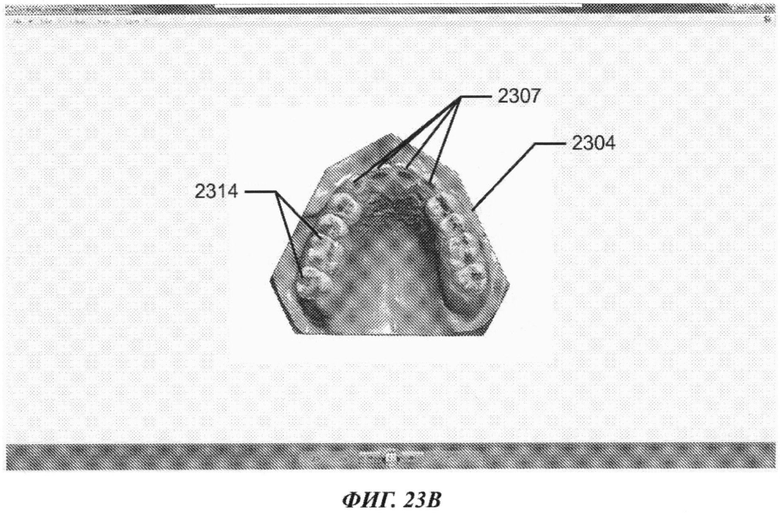
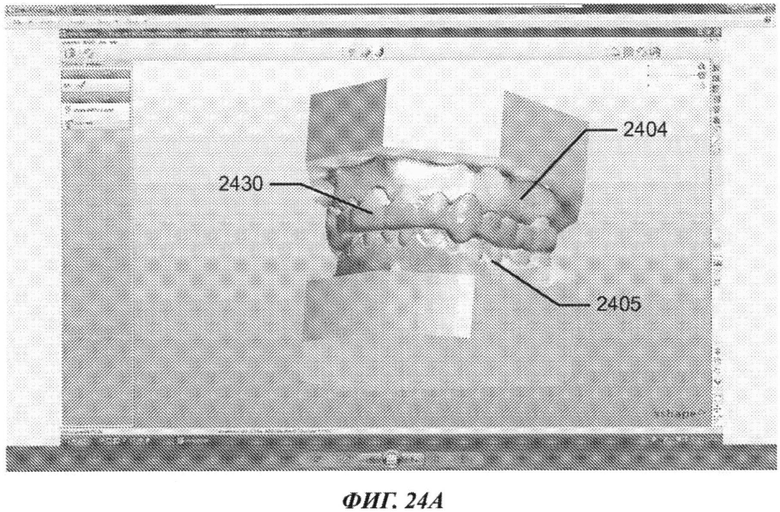

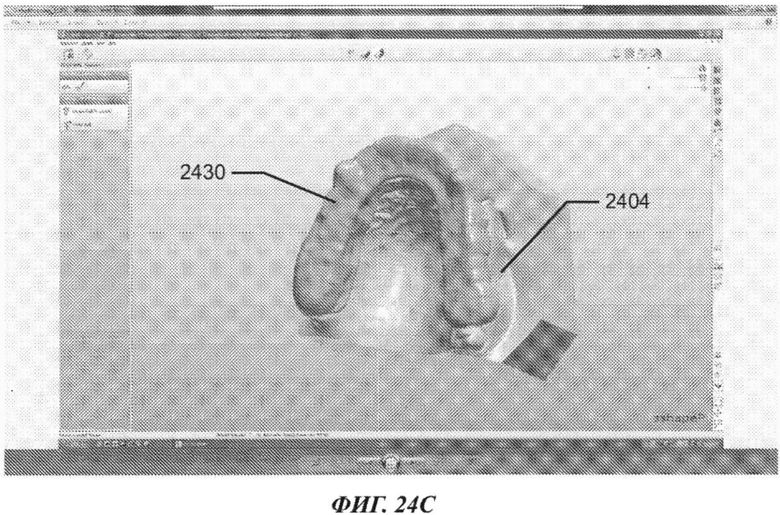
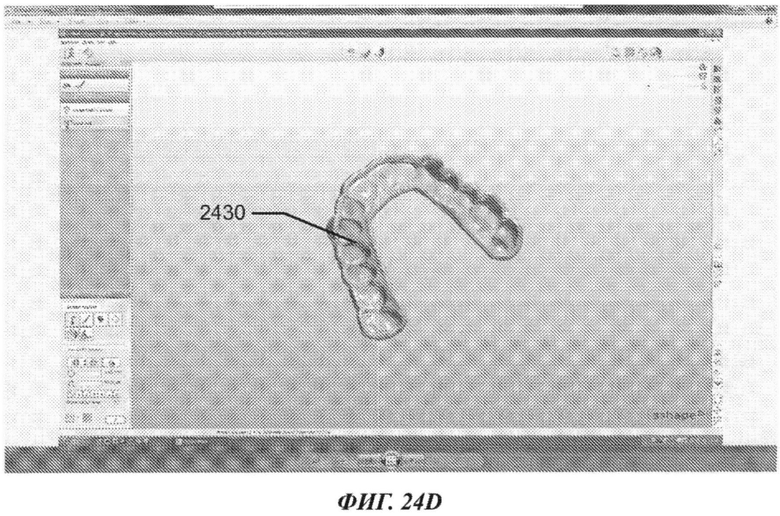
Изобретение относится к медицинской технике, а именно к средствам для динамической виртуальной артикуляции. Способ состоит в использовании виртуального артикулятора, содержащего виртуальную трехмерную модель верхней челюсти и виртуальную трехмерную модель нижней челюсти, повторяющие верхнюю челюсть и нижнюю челюсть, обеспечение движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга. Способ включает предотвращение пересечения между собой виртуальной поверхности зубов виртуальной верхней челюсти и виртуальной поверхности зубов виртуальной нижней челюсти. Во втором варианте выполнения способа, содержащего виртуальную трехмерную модель зубов, в которую входит верхняя челюсть, определяемая как виртуальная верхняя челюсть, и виртуальную трехмерную модель зубов, в которую входит нижняя челюсть, определяемая как виртуальная нижняя челюсть. Система виртуального артикулятора содержит виртуальный артикулятор, содержащий виртуальную трехмерную модель верхней челюсти и виртуальную трехмерную модель нижней челюсти, повторяющие верхнюю челюсть и нижнюю челюсть пациента, и средства обеспечения движений виртуальных верхней и нижней челюстей относительно друг друга. Использование группы изобретений позволяет выполнять движения, повторяющие и имитирующие реальные процессы, происходящие во рту. 3 н. и 12 з.п. ф-лы, 24 ил.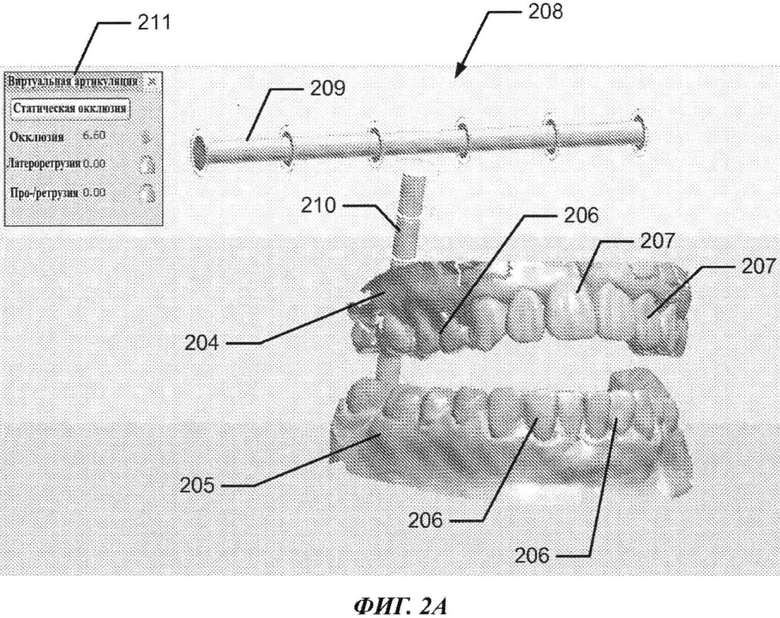
1. Способ использования динамического виртуального артикулятора для имитационного моделирования окклюзии при выполнении автоматизированного проектирования одного или более стоматологических протезов для пациента, реализуемый при помощи компьютера, включающий следующие стадии:
обеспечение виртуального артикулятора, содержащего виртуальную трехмерную модель верхней челюсти и виртуальную трехмерную модель нижней челюсти, повторяющие верхнюю челюсть и нижнюю челюсть пациента соответственно;
обеспечение движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга для имитационного моделирования динамической окклюзии при возникновении контактов между зубами виртуальной верхней и виртуальной нижней челюстей,
причем способ включает предотвращение пересечения между собой виртуальной поверхности зубов виртуальной верхней челюсти и виртуальной поверхности зубов виртуальной нижней челюсти при указанных контактах, при этом указанные протезы являются проницаемыми.
2. Способ по п. 1, отличающийся тем, что включает одновременное моделирование одного или более протезов и исследование контактов виртуальной верхней челюсти и виртуальной нижней челюсти.
3. Способ по п. 1, отличающийся тем, что включает фиксацию виртуальной верхней челюсти с окклюзионной осью таким образом, что нижняя челюсть может двигаться относительно виртуальной верхней челюсти.
4. Способ по п. 1, отличающийся тем, что включает конфигурирование виртуальной нижней челюсти таким образом, что она может автоматически двигаться по одной или более предварительно заданным траекториям перемещения относительно виртуальной верхней челюсти.
5. Способ по п. 1, отличающийся тем, что часть одного или более стоматологических протезов, вступающих в контакт, автоматически удаляют из соответствующей виртуальной челюсти.
6. Способ по п. 1, отличающийся тем, что включает позиционирование виртуальной плоскости выравнивания относительно виртуальной верхней челюсти и виртуальной нижней челюсти, при этом виртуальная верхняя челюсть и виртуальная нижняя челюсть описывают виртуальную модель зубного ряда, причем способ включает следующие стадии:
визуализация виртуальной плоскости выравнивания, виртуальной верхней челюсти и виртуальной нижней челюсти; и
автоматическое позиционирование виртуальной плоскости выравнивания, виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга на основе одного или более параметров.
7. Способ по п. 1, отличающийся тем, что получают один или более параметров по результатам измерения лица пациента лицевой дугой, где
лицевая дуга содержит прикусную вилку со слепочным материалом для снятия отпечатка верхнечелюстной зубной дуги, причем способ включает определение положения и ориентации прикусной вилки относительно лицевой дуги, и дополнительно включает сканирование прикусной вилки с отпечатком верхнечелюстной зубной дуги для получения скана отпечатка и скана прикусной вилки.
8. Способ по п. 1, отличающийся тем, что включает регистрацию всех контактов, происходящих между зубами при движении виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга, и моделирование точек контактов протезов по окончании этого движения.
9. Способ по п. 1, отличающийся тем, что включает регистрацию следа контактной поверхности и автоматическое вырезание зубного материала на основе расположения контактной поверхности.
10. Способ использования динамического виртуального артикулятора для имитационного моделирования окклюзии при выполнении планирования ортодонтической обработки зубов пациента при помощи средств автоматизированного проектирования, реализуемый посредством компьютера, включающий следующие стадии:
обеспечение виртуального артикулятора, содержащего виртуальную трехмерную модель зубов, в которую входит верхняя челюсть, определяемая как виртуальная верхняя челюсть, и виртуальную трехмерную модель зубов, в которую входит нижняя челюсть, определяемая как виртуальная нижняя челюсть, повторяющие, соответственно, верхнюю челюсть и нижнюю челюсть пациента;
обеспечение движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга для имитационного моделирования динамической окклюзии при возникновении контактов между зубами виртуальной верхней и виртуальной нижней челюстей,
причем способ включает предотвращение пересечения между собой виртуальной поверхности зубов виртуальной верхней челюсти и виртуальной поверхности зубов виртуальной нижней челюсти при указанных контактах, при этом один или более стоматологических протезов для пациента являются проницаемыми.
11. Способ по п. 10, отличающийся тем, что на основе имитационного моделирования окклюзии формируют окклюзионный компас.
12. Способ по п. 11, отличающийся тем, что окклюзионный компас показывает движения с разными цветами зубов в следующих направлениях:
протрузия; ретрузия; латеротрузия вправо; латеротрузия влево; медиотрузия вправо; медиотрузия влево; латероресюртрузия вправо; латероресюртрузия влево.
13. Способ по п. 10, отличающийся тем, что формируют томографический скан рта пациента, и на основе данного скана автоматически формируют виртуальную 3D-модель рта пациента, а также задают параметры окклюзии для имитационного моделирования окклюзии на основе томографической 3D-модели.
14. Способ по п. 10, отличающийся тем, что записывают движения виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга и/или после моделирования протеза воспроизводят запись для анализа модели.
15. Система виртуального артикулятора для имитационного моделирования окклюзии при выполнении автоматизированного проектирования одного или более стоматологических протезов для пациента, содержащая:
средства обеспечения виртуального артикулятора, содержащего виртуальную трехмерную модель верхней челюсти и виртуальную трехмерную модель нижней челюсти, повторяющие верхнюю челюсть и нижнюю челюсть пациента соответственно;
средства обеспечения движений виртуальной верхней челюсти и виртуальной нижней челюсти относительно друг друга для имитационного моделирования динамической окклюзии при возникновении контактов между зубами виртуальной верхней и виртуальной нижней челюстей,
причем система включает средства предотвращения пересечения между собой виртуальной поверхности зубов виртуальной верхней челюсти и виртуальной поверхности зубов виртуальной нижней челюсти при указанных контактах, а также средства обеспечения проницаемости указанных протезов.
| US 2005118555 A1, 02.06.2005Е.Е | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

