Предложенное изобретение относится к области ракетной техники, а более конкретно к устройствам стабилизации ракеты.
Наиболее близким по набору существенных признаков является техническое решение по патенту РФ №2315261, F42B 15/00, F42B 10/62, 2006 г., которое и было принято авторами за аналог.
Данное техническое решение представляет собой устройство стабилизации авиационной крылатой ракеты, содержащее органы управления в виде четырех пар кинематически связанных между собой аэродинамических и газовых рулей. Каждая пара рулей устройства стабилизации размещена в плоскостях установки аэродинамических рулей ракеты и связана с соответствующим приводом руля ракеты посредством тяг управления и механизма управления рулями устройства стабилизации.
К недостаткам данного устройства следует отнести то, что расположение тяг на корпусе ракеты зависит от размеров мест крепления тяг с аэродинамическими и газовыми рулями. Оттого, какой диаметр будет у валов аэродинамических и газовых рулей, будет зависеть расположение тяг, а также размеры гаргротов, которые закрывают тяги. Следовательно, увеличения габаритов валов приводит к увеличению габаритов всей системы стабилизации ракетой.
Целью предлагаемого изобретения является уменьшение пространственного объема, занимаемого тягами устройства стабилизации ракеты.
Указанная цель достигается тем, что устройство стабилизации ракеты представлено в виде четырех пар кинематически связанных между собой парой ленточных тяг аэродинамических и газовых рулей. На валу аэродинамического руля каждой кинематической пары выполнены паз и кольцевая проточка с размещенным в ней тросом. На тросе жестко закреплена втулка, которая расположена в пазу. Трос жестко соединен с одним концом пары ленточных тяг, при этом другой конец пары ленточных тяг, которые натянуты тандерами, шарнирно соединен с качалкой, жестко соединенной с газовым рулем. Каждая кинематическая пара снабжена роликами, расположенными друг от друга на расстоянии меньше диаметра вала, установленными на осях, жестко закрепленных на корпусе ракеты, при этом трос пропущен через ролики.
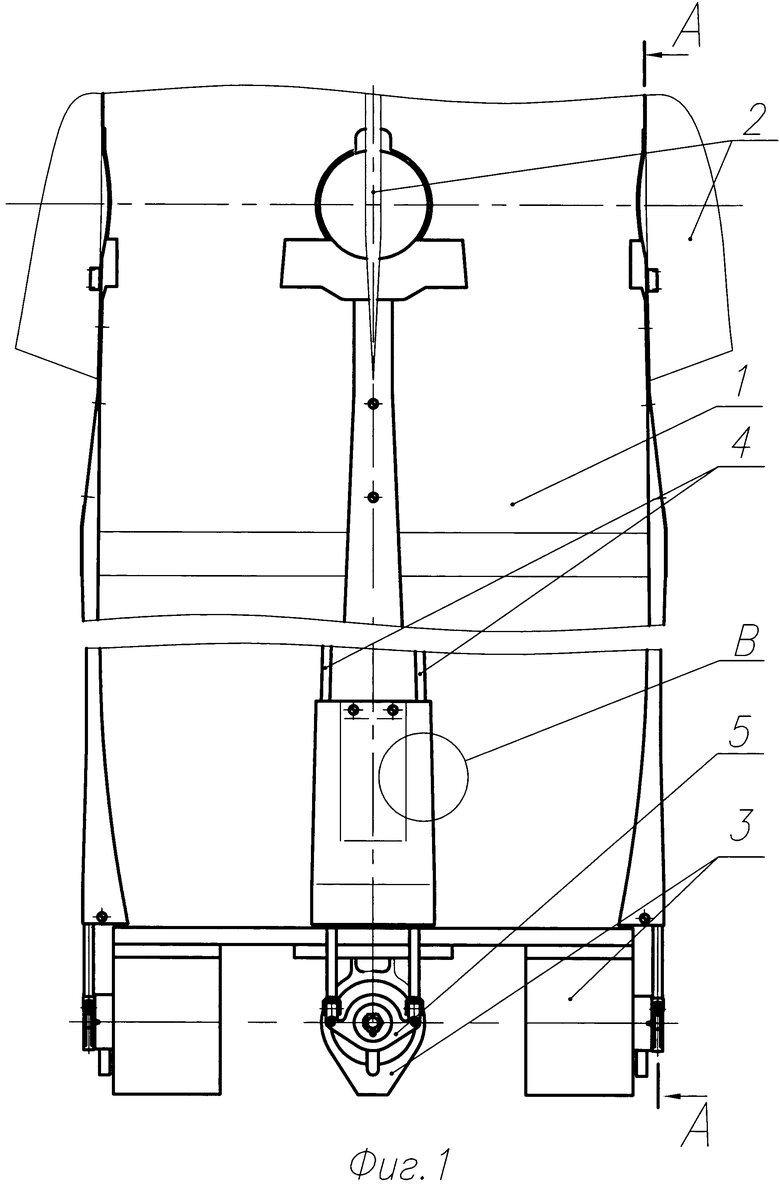
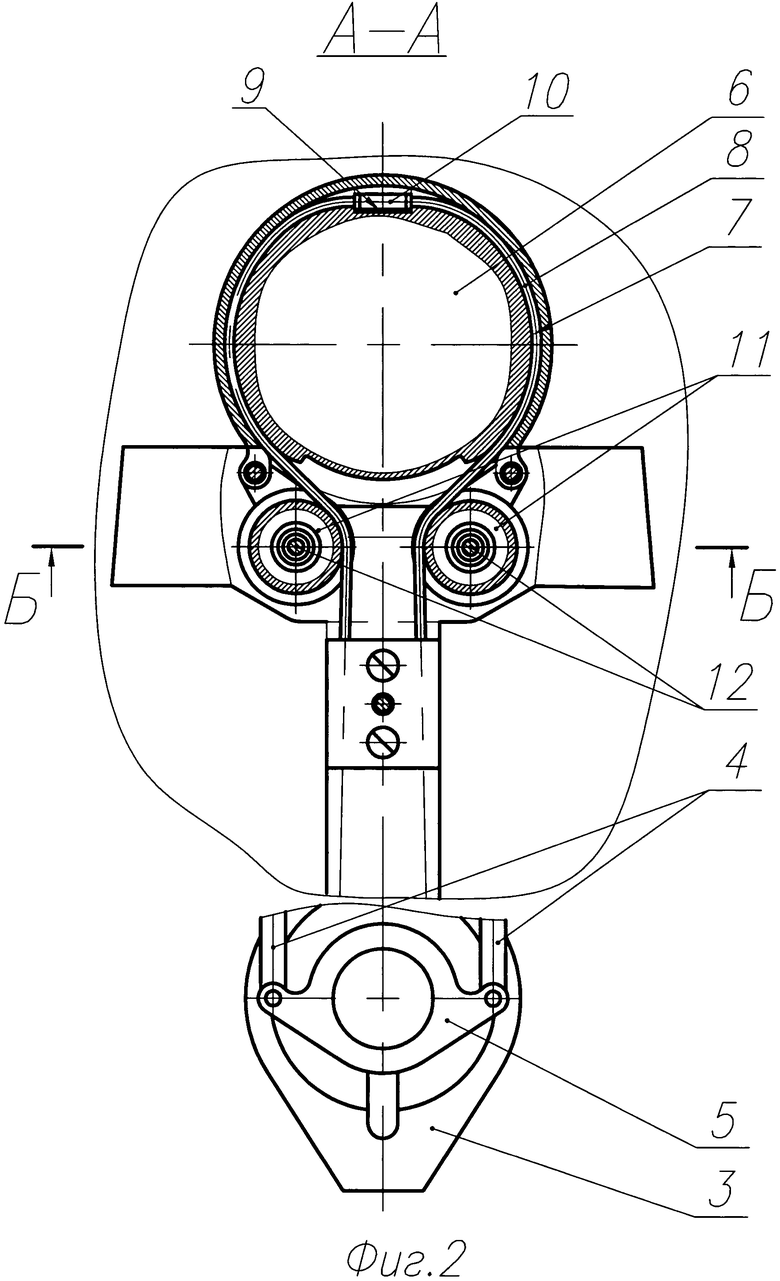
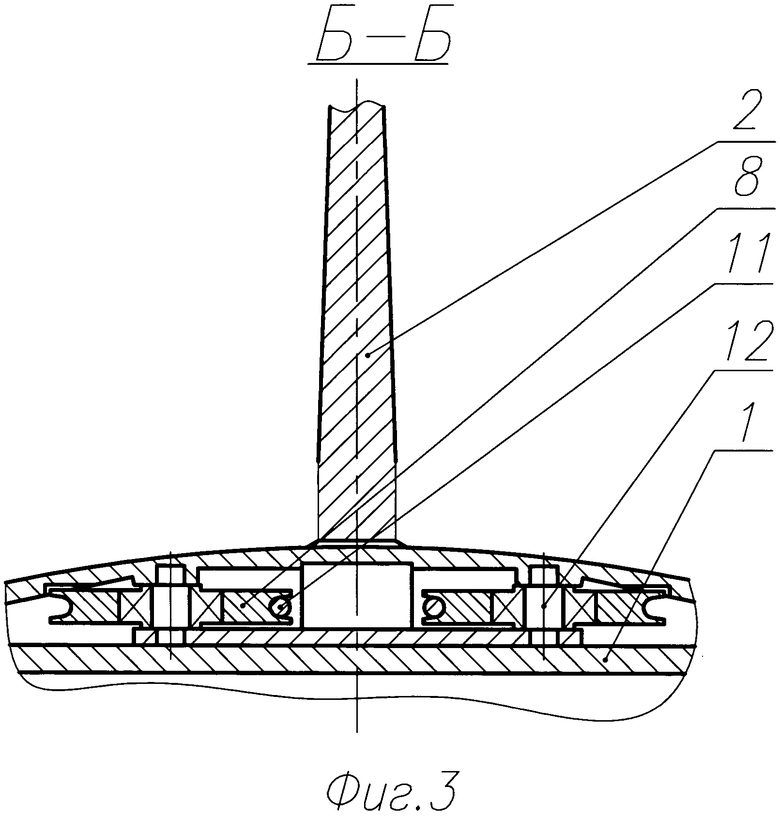
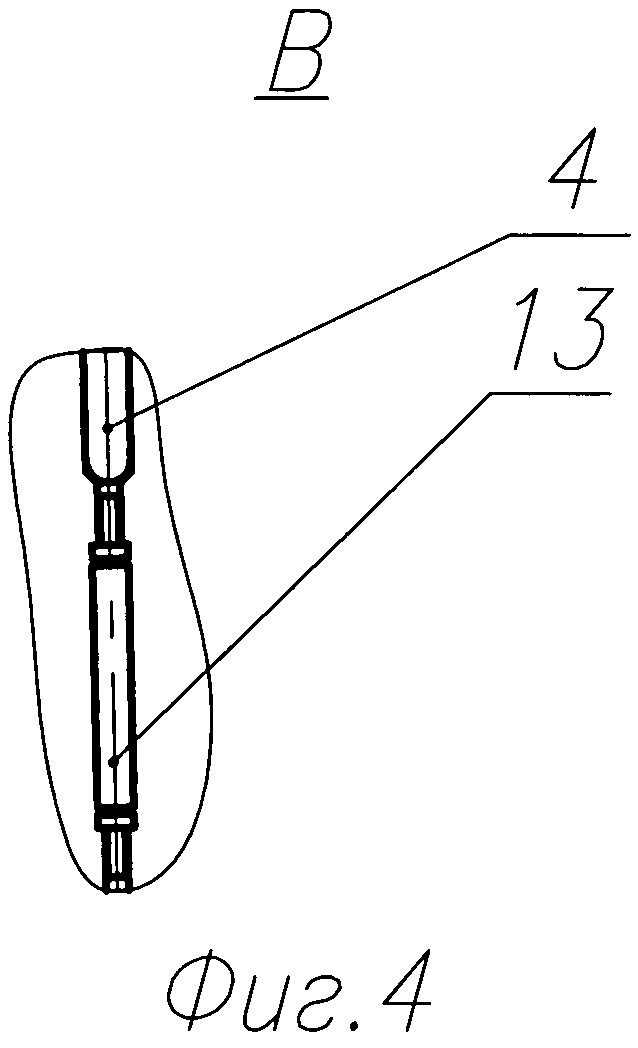
Сущность изобретения поясняется чертежами, где на фиг. 1-3 изображен общий вид ЛА и сечения по отдельным элементам.
На фиг. 1-3 указаны позиции в следующем порядке:
1 - корпус ракеты;
2 - аэродинамический руль;
3 - газовый руль;
4 - ленточная тяга;
5 - качалка;
6 - вал;
7 - проточка;
8 - трос;
9 - паз;
10 - втулка;
11 - ролик;
12 - ось;
13 - тандер.
Устройство стабилизации ракеты состоит из четырех пар кинематически связанных между собой аэродинамического руля 2 и газового руля 3. На валу 6 аэродинамического руля 2 выполнены паз 9 и кольцевая проточка 7 с размещенным в ней тросом 8. На тросе 8 жестко закреплена втулка 10, которая расположена в пазу 9. Трос 8 жестко соединен с одним концом пары ленточных тяг 4, которые натянуты тандерами 13, при этом другой конец пары ленточных тяг 4 шарнирно соединен с качалкой 5, жестко соединенной с газовым рулем 3. Каждая кинематическая пара снабжена роликами 11, расположенными на расстоянии меньше диаметра вала 6 друг от друга и установленными на осях 12, жестко закрепленных на корпусе ракеты 1.
Устройство работает следующим образом.
При передаче управляющего воздействия на аэродинамические рули 4 происходит его поворот, при этом происходит перемещение троса 8 с ленточными тягами 4, которые, в свою очередь, поворачивают качалку 5 вместе с газовым рулем 3. Трос 8, сходящий с вала 6 по касательной, занимая при этом достаточно пространственного объема, мешает установке крышек жалюзи изделия (не показаны), т.е. проходят по месту установки последних. Поэтому с целью уменьшения занимаемого объема тросом 8, переходящего в ленточные тяги 4, устройство снабжено роликами 11, через которые проходит трос 8. Для избегания провисания тяг при передаче управляющего момента ленточные тяги при помощи тандеров 13 натягиваются с определенным усилием.
Предложенное техническое решение позволяет реализовать конструкцию устройства стабилизации ракеты с уменьшенными габаритными характеристиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАЗДЕЛЕНИЯ СТУПЕНЕЙ ДВУХСТУПЕНЧАТОЙ РАКЕТЫ | 2014 |
|
RU2548261C1 |
| УСТРОЙСТВО РАЗДЕЛЕНИЯ СТУПЕНЕЙ ДВУХСТУПЕНЧАТОЙ РАКЕТЫ | 2015 |
|
RU2635812C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ РАКЕТЫ | 2015 |
|
RU2635705C2 |
| РАСКРЫВАЕМЫЙ РУЛЬ РАКЕТЫ | 2013 |
|
RU2532286C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АВИАЦИОННОЙ КРЫЛАТОЙ РАКЕТЫ | 2006 |
|
RU2315261C2 |
| МЕХАНИЗМ РАСКРЫТИЯ РУЛЯ | 2018 |
|
RU2686764C1 |
| РАСКРЫВАЕМЫЙ РУЛЬ РАКЕТЫ | 2014 |
|
RU2568974C1 |
| РАСКРЫВАЕМЫЙ РУЛЬ | 2015 |
|
RU2587751C1 |
| РАСКРЫВАЕМЫЙ РУЛЬ РАКЕТЫ | 2013 |
|
RU2520812C1 |
| АЭРОДИНАМИЧЕСКИЙ РУЛЬ РАКЕТЫ | 2014 |
|
RU2569234C1 |
Изобретение относится к области ракетной техники и может быть использовано в устройствах стабилизации. Устройство стабилизации ракеты содержит органы управления в виде четырех пар кинематически связанных между собой и натянутой тандерами парой ленточных тяг с роликами аэродинамических и газовых рулей с валами с пазом под втулку, кольцевой проточкой с тросом, пропущенным через ролики, качалку, шарнирно соединенную с парой ленточных тяг. Изобретение позволяет уменьшить габариты устройства. 4 ил.
Устройство стабилизации ракеты, содержащее органы управления, выполненные в виде четырех пар кинематически связанных между собой парой ленточных тяг аэродинамических и газовых рулей, отличающееся тем, что на валу аэродинамического руля каждой кинематической пары выполнена кольцевая проточка с размещенным в ней тросом, жестко соединенным с одним концом пары ленточных тяг, которые натянуты тандерами, и паз под втулку, которая жестко закреплена на тросе, при этом другой конец пары ленточных тяг шарнирно соединен с качалкой, жестко соединенной с газовым рулем, каждая кинематическая пара снабжена роликами, расположенными друг от друга на расстоянии меньше диаметра вала, установленными на осях, жестко закрепленных на корпусе ракеты, при этом трос пропущен через ролики.
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АВИАЦИОННОЙ КРЫЛАТОЙ РАКЕТЫ | 2006 |
|
RU2315261C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| DE 19959357 A1, 13.06.2001 | |||
| JP 2003262500 A, 19.09.2003. | |||

