Предлагаемое устройство относится к области измерительной техники, автоматике, станкостроению, приборостроению, робототехнике, системам слежения и может быть использовано в углоизмерительных устройствах, например приборах астроориентации.
В настоящее время получили распространение датчики угла поворота (иначе, фотоэлектрические цифровые преобразователи угла), использующие кодовые и растровые преобразования (см., например, Преснухин Л.Н. и др. «Фотоэлектрические преобразователи информации». - М.: Машиностроение, 1974). При уровне погрешностей в единицы угловых секунд диаметр их кодовых лимбов может доходить до 300 мм (Королев А.Н., Лукин А.Я., Полищук Г.С. «Новая концепция измерения угла. Модельные и экспериментальные исследования». Оптический журнал, 2012, т.79, №6, стр.52-58). Поэтому уменьшение габаритов таких датчиков при увеличении точности является актуальной задачей. С этой точки зрения наибольший интерес представляет изобретение малогабаритного датчика угла (Дукаревич Ю.Е., Дукаревич М.Ю. «Абсолютный преобразователь угла (варианты)». Патент РФ №2419067, 20.05.2011 - прототип), в котором формулируется подход к измерению углов, основанный на использовании двумерных матричных фотоприемных устройств (МФПУ) для решения одномерной задачи измерения плоского угла. Такой подход позволяет уменьшить размеры измерительного устройства (датчика угла поворота) перпендикулярно оси его вращения и существенно снизить погрешность измерения за счет высокого уровня усреднения большого количества одиночных отсчетов.
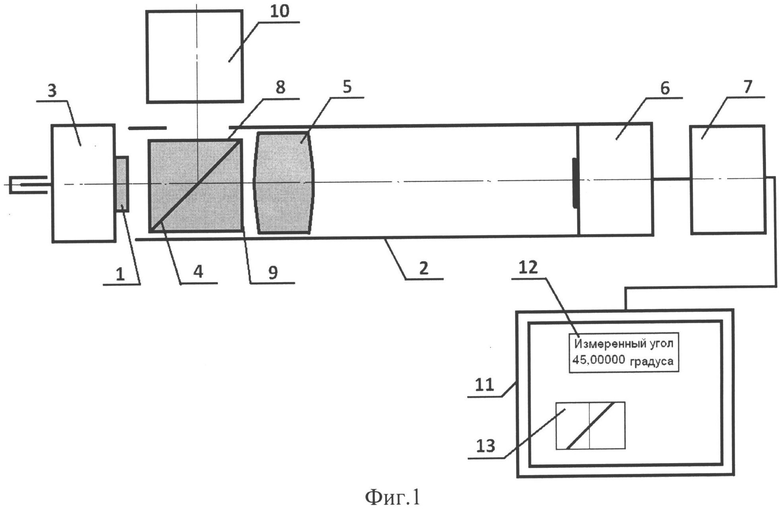
Указанный выше прототип (датчик угла поворота), работающий на отражение, представлен на фиг.1. Он состоит из сигнальной маски 1 и неподвижного измерительного блока 2. Сигнальная маска 1 закреплена на вращающемся контролируемом объекте 3 и обращена к измерительному блоку 2. При вращении контролируемого объекта 3 соответственно вращается и сигнальная маска 1. Измерительный блок 2 состоит из светоделителя 4, выполненного, например, в виде светоделительной куб-призмы, за которой расположен объектив 5. Оптическая ось осесимметричного объектива (ось симметрии) является оптической осью датчика. За указанным объективом установлена матрица пикселей МФПУ 6, подключенного к электронному блоку 7. Посредством объектива 5 МФПУ 6 оптически сопряжен с сигнальной маской 1. Светоделительная куб-призма 4 имеет входную 8 и выходную 9 грани. Осветитель 10 для подсветки сигнальной маски 1 закреплен на измерительном блоке перед входной гранью 8 светоделителя 4. В состав электронного блока 7 может входить персональный компьютер с монитором 11, который на фиг.1 представлен для наглядности дальнейшего изложения. Сигнальная маска 3 представляет собой черную (малоотражающую) сетку с узким зеркальным штрихом.
Датчик угла поворота работает следующим образом.
Свет (лучи) от осветителя 10, отразившись от светоделителя 4, освещает сигнальную маску 1. Отраженные от зеркального штриха сигнальной маски лучи, пройдя светоделитель 4 и объектив 5, сфокусируются на МФПУ 6 в виде изображения указанного зеркального штриха. Положение изображения штриха, строго перпендикулярное строкам МФПУ, является нулевым (измеряемый угол - ноль градусов). При повороте контролируемого объекта совместно с сигнальной маской на угол γ изображение штриха повернется на МФПУ также на измеряемый угол γ. С помощью электронного блока 7 производится определение x0j энергетического центра каждой части изображения штриха в каждой строке МФПУ 6. Таким образом, количество измерений равно количеству строк МФПУ (или при большем угле - количеству его столбцов). Далее по алгоритму, представленному в патенте РФ №2419067, в электронном блоке 7 производится вычисление угла γ. Для наглядности на фиг.1 показан экран монитора с двумя окнами 12, 13. В окне 12 приводится значение измеренного угла γ. В окне 13, которое подобно размерам матрицы МФПУ, показано положение изображения штриха.
Следует особо подчеркнуть, что выполнение сигнальной маски в виде одиночного штриха является частным случаем. В принципе, сигнальная маска может иметь и другой рисунок (см., например, Королев А.Н., Лукин А.Я., Полищук Т.С. «Новая концепция измерения угла. Модельные и экспериментальные исследования». Оптический журнал, 2012, т.79, №6, стр.52-58).
Недостатки рассмотренного датчика угла поворота:
1. Из-за шумов и других факторов, присущих МФПУ, имеет место погрешность измерения положения энергетического центра изображения на матрице, которая составляет долю от размера пикселя. Из нашего практического опыта работы с разнообразными МФПУ указанная погрешность составляет 1/10…1/30 от размера пикселя. Приведенное в патенте РФ №2419067 значение погрешности в 0,03 от размера пикселя можно рассматривать как предельное. Количество строк (столбцов) МФПУ также ограничено. Поэтому существенно повысить точности такого типа малогабаритных датчиков угла поворота (на основе МФПУ) не представляется возможным.
2. Изменение расстояния между контролируемым объектом (сигнальной маской) и измерительным блоком приводит к расфокусировке изображения на МФПУ и соответствующему ухудшению его точности.
Задачей, на решение которой направлено предлагаемое изобретение, является создание высокоточного прибора при обеспечении его малых габаритов и отсутствия расфокусировки изображения на МФПУ.
Данная задача решается за счет того, что в заявленном датчике угла поворота, содержащем сигнальную маску с осветителем и измерительный блок, состоящий из светоделителя, объектива и МФПУ, оптически сопряженного с сигнальной маской и подключенного к электронному блоку, а также контролируемый объект, установленный с возможностью поворота относительно измерительного блока, на контролируемом объекте дополнительно закреплен оптический элемент, выполненный в виде двойного зеркала с прямым углом между его зеркалами, обращенного к объективу, светоделитель расположен между объективом и МФПУ, а сигнальная маска установлена перед светоделителем в фокальной плоскости объектива.
При этом двойное зеркало, выполненное в виде призмы БР-180°, установлено так, что ребро между ее зеркальными гранями перпендикулярно оптической оси объектива, светоделитель может быть выполнен в виде светоделительной куб-призмы, светоделительная плоскость которой расположена под углом 45° к оптической оси объектива, а сигнальная маска установлена так, что ее оптическая ось перпендикулярна оптической оси датчика и совмещена с центром светоделителя.
Технический результат, обеспечиваемый приведенной совокупностью признаков, выражается в повышении точности измерения угла поворота контролируемого объекта.
Это достигается тем, что отсутствует расфокусировка изображения сигнальной маски в фокальной плоскости объектива и введением оптического элемента в виде двойного зеркала с прямым углом и его установки, что приводит к увеличению угловой чувствительности данного датчика угла поворота в два раза и к соответствующему увеличению его точности.
Сущность изобретения поясняется чертежами, на которых изображено:
на фиг.1 - прототип;
на фиг.2 - предлагаемое изобретение;
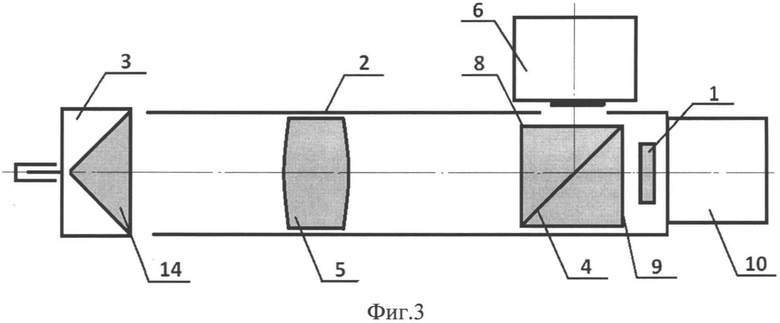
на фиг.3 - другой вариант конструктивного выполнения предлагаемого изобретения (те же средства, но иная композиция, однако у конструкции проявляются физические закономерности, как на фиг.1, но достигается тот же технический результат);
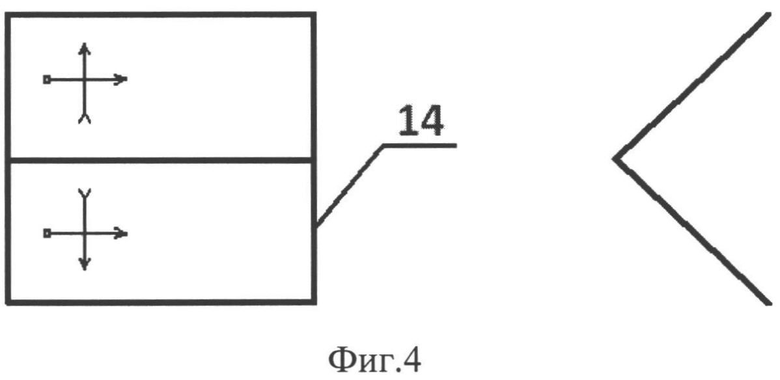
на фиг.4 - двойное зеркало, ребро которого расположено горизонтально;
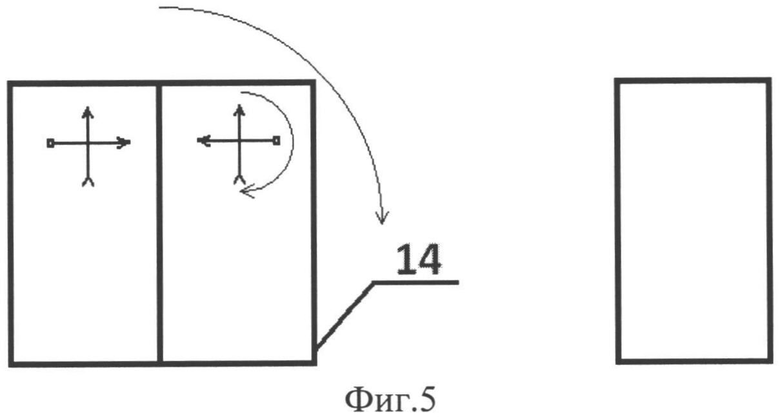
на фиг.5 - двойное зеркало, повернутое на 90°, ребро которого расположено вертикально;
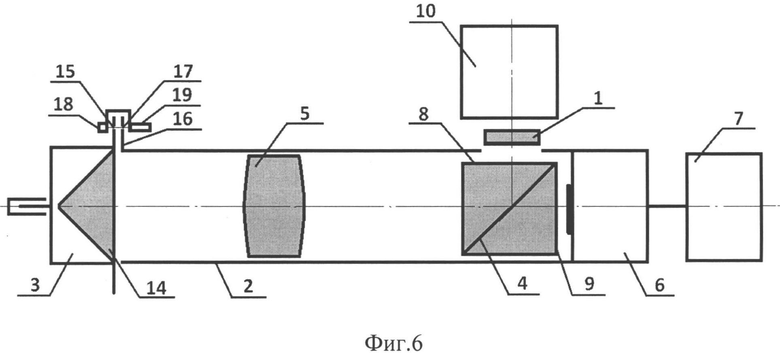
на фиг.6 - средства фиксации нулевого положения контролируемого объекта;
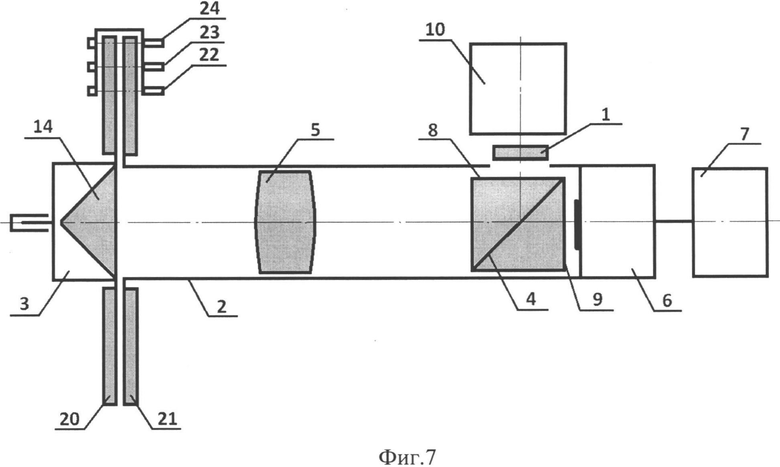
на фиг.7 - средство для определения поворота контролируемого объекта на соответствующем квадранте;
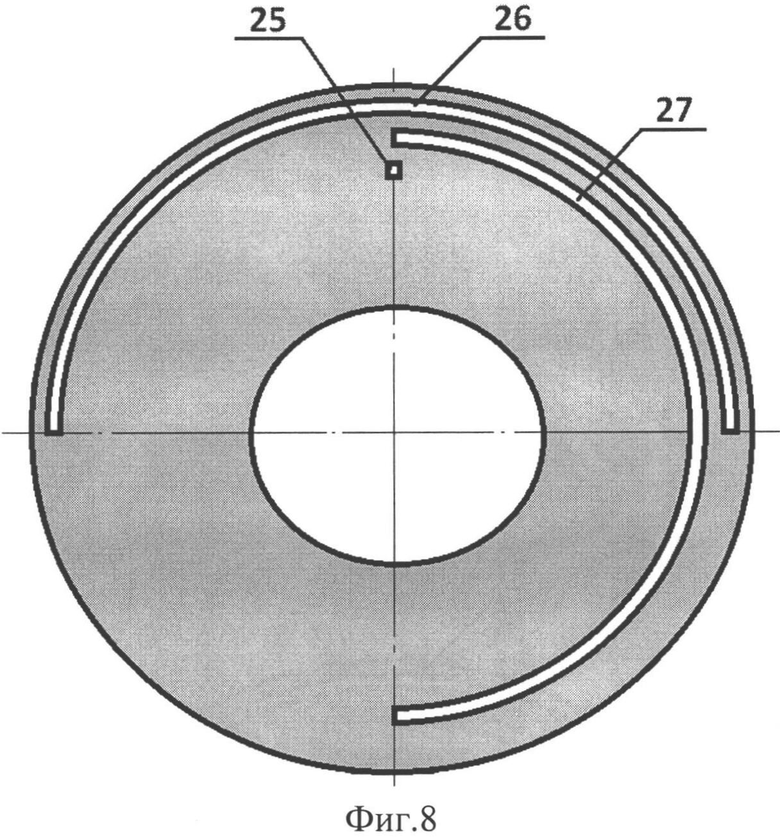
на фиг.8 - диск, закрепляемый на контролируемом объекте для определения номера квадранта и нулевого положения.
Предлагаемое изобретение (датчик угла поворота, работающий на отражение) представлено на фиг.2. Устройство состоит из сигнальной маски 1, неподвижного измерительного блока 2 и включает контролируемый вращающийся объект 3. Кроме того, в него входит светоделитель 4, расположенный между объективом 5 и МФПУ 6, а сигнальная маска 1 установлена перед светоделителем 4 в фокальной плоскости объектива 5. Матрица МФПУ 6 оптически сопряжена с сигнальной маской 1. Поэтому МФПУ совмещено с фокальной плоскостью объектива 5. По существу, измерительный блок 2 представляет собой обычный автоколлиматор. Светоделитель 4 может быть выполнен в виде светоделительной куб-призмы, светоделительная плоскость которой расположена под углом 45° к оптической оси объектива 5. Сигнальная маска 1 установлена так, что ее оптическая ось симметрии перпендикулярна оптической оси датчика и совмещена с центром светоделителя. В то же время возможен и другой вариант конструктивного размещения МФПУ 6 и сигнальной маски 1 с ее осветителем 10, который показан на фиг.3, где указанные элементы по сравнению с фиг.2 переставлены местами. При этом МФПУ 6 и сигнальная маска 1 остались в фокальной плоскости объектива 5. В состав электронного блока 7 входит также персональный компьютер с монитором 11. Сигнальная маска 1 (фиг.2, 3), работающая на проход, представляет собой осесимметричную сетку с узким прозрачным штрихом и непрозрачным покрытием. Указанный штрих расположен в плоскости чертежа, исходное (нулевое) положение призмы БР-180°, когда ее ребро горизонтально (перпендикулярно плоскости чертежа), а измеряемый угол - ноль градусов (см. фиг.2), при этом на контролируемом объекте 3 закреплен оптический элемент, выполненный в виде двойного зеркала 14 с прямым углом между его зеркалами, обращенного к объективу 5 измерительного блока 2. На фиг.2 информация в окнах 12, 13 приведена для другого положения двойного зеркала 14 (см. ниже). Двойное зеркало, выполненное, например, в виде призмы БР-180°, может быть установлено так, что ребро между ее зеркальными гранями перпендикулярно оптической оси 5 и оси вращения контролируемого объекта.
Прежде чем описывать работу датчика угла поворота, рассмотрим оптические свойства двойного зеркала 14. Из прикладной оптики известно, что при повороте двойного зеркала с прямым углом между его зеркалами на угол γ изображение, которое формируется посредством указанного двойного зеркала, повернется на угол 2γ. Проиллюстрируем это положение графически с помощью креста стрелок, ориентация которого показывает вращение изображения при вращении двойного зеркала. На фиг.4 показано двойное зеркало, ребро которого расположено горизонтально. В верхнем левом углу фронтальной проекции двойного зеркала приведен входной крест стрелок, а в левом нижнем углу - выходной. При плавном повороте двойного зеркала вокруг оси вращения, проходящей перпендикулярно ребру двойного зеркала, изображение после двойного зеркала также будет плавно вращаться. На фиг.5 показано двойное зеркало, повернутое на 90°, ребро которого расположено теперь вертикально. В верхнем левом углу фронтальной проекции двойного зеркала приведен входной крест стрелок (без изменения ориентации, как это показано на фиг.4), в правом верхнем углу - выходной. Как видно из фиг.4, 5, при повороте двойного зеркала на 90° выходной крест стрелок повернулся на 180°.
Датчик угла поворота работает следующим образом (фиг.2).
Свет (лучи) от осветителя 10, пройдя прозрачный штрих сигнальной маски 1, отразившись от светоделителя 4 и выйдя из объектива 5 в виде параллельного пучка лучей, освещает двойное зеркало 14. Затем параллельные лучи, отразившись от призмы БР-180° 14, фокусируются объективом 5 и, пройдя куб-призму 4, строят на МФПУ изображение штриха сигнальной маски 1. При повороте контролируемого объекта 3 совместно с двойным зеркалом на угол γ изображения штриха повернется на МФПУ на угол 2γ=φ. С помощью электронного блока 7 производится определение x0j энергетического центра каждой части изображения штриха в каждой строке МФПУ 6. Таким образом, количество измерений равно количеству строк МФПУ (или при большем угле - количеству его столбцов). Далее по алгоритму, представленному в патенте РФ №2419067, в электронном блоке 7 производится вычисление угла γ по формуле γ=φ/2, где φ - угол поворота изображения штриха на МФПУ 6. В качестве примера на фиг.2 показан экран монитора с двумя окнами 12, 13 (графически БР-180° показан в исходном положении). В окне 12 приведено значение измеренного угла γ=45,00000° (при физическом повороте углового зеркала также на 45°). В окне 13, которое подобно размерам матрицы МФПУ, показано фактическое положение изображения штриха, которое располагается теперь на МФПУ 6 горизонтально.
Рассмотренное удвоение угла поворота изображения штриха сигнальной маски 1 на МФПУ 6 по сравнению с прототипом приводит к увеличению угловой чувствительности данного датчика угла поворота в два раза и к соответствующему увеличению его точности. При этом следует отметить, что в пространстве между объективом 5 и призмой БР-180° организован параллельный ход лучей, что, соответственно, обеспечивает реализацию нечувствительности датчика угла поворота к изменению расстояния между контролируемым объектом 3 и измерительным блоком 2. При этом указанный параллельный ход лучей обеспечивает также нечувствительность (нерасстраиваемость) датчика угла поворота к смещениям контролируемого объекта 3 относительно измерительного блока 2 и, в частности, к эксцентриситету оси вращения контролируемого объекта 3 относительно блока 2. Отметим также, что в осевых системах высокоточных углоизмерительных приборов угловое и линейное биение не превышает соответственно 0,3″ и 0,0003 мм (Михеечев В.С., Попов Н.Н. «Конструирование и изготовление геодезических приборов». Учебное пособие - М.: Изд. МИИГАиК, 2006 г., 127 с.).
Наиболее просто использовать данный датчик угла поворота в квадрантах с диапазоном измерений 0-90 угловых градусов. Такие квадранты широко применяются при определении угла наклона поверхности относительно горизонта (см., например, ГОСТ 10908-75). В астрономии квадранты служат для измерения высоты небесных светил над горизонтом и угловых расстояний между светилами. Традиционный секстант также выдает результаты измерений в диапазоне углов 90°. При использовании датчика угла поворота для решения угломерных задач в диапазоне 0°-90° вводится соответствующее механическое ограничение угла поворота контролируемого объекта 3 относительно измерительного блока 2. В этом случае угловое положение контролируемого объекта 3 однозначно определяет угол γ. Помимо датчиков углов поворота существуют другие датчики углов, например датчики углов наклона (инклинометры), рабочий диапазон измерений которых меньше 90°.
При использовании датчика угла поворота в диапазоне 0°-360° (например, в гониометре) вводится внешнее место нуля (начала отсчетов), которое отмечает положение контролируемого объекта 3, когда на мониторе 11 измеренный угол равен 0° (или близок к нему). Алгоритм измерения угла несколько усложняется. Когда начинается поворот контролируемого объекта 3 от его нулевого положения и соответственный поворот изображения штриха на МФПУ, тогда сразу начинается грубое измерение и учет текущего угла γ=φ/2, осуществляемого по определенной циклограмме, от нуля до искомого (измеряемого) угла. Затем окончательное измерение угла контролируемого объекта 3 и точное значение искомого угла γ реализуется при обработке искомого углового положения изображения штриха на МФПУ 6 по алгоритму, основанному на патенте РФ №2419067. Такое усложнение датчика угла поворота вызвано тем обстоятельством, что при повороте контролируемого объекта на 360° изображение штриха сигнальной маски на МФПУ 6 сделает два полных оборота. Положение внешнего места нуля может быть выполнено достаточно грубо. Например, на корпусах контролируемого объекта и измерительного устройства наносятся риски, при совмещении которых контролируемый объект располагается в нулевом положении относительно измерительного блока. Или, например, на контролируемом объекте 3 закрепляется диск с отверстием 15, а на измерительном устройстве пластина 16 с отверстием 17, перед которым установлена оптронная пара, содержащая светодиод 18 и приемник излучения 19 (см. фиг.6). При совмещении отверстий 15, 17 контролируемый объект 3 располагается в нулевом положении относительно измерительного блока 2, а электрический сигнал от оптронной пары передается в электронный блок 7. В математике окружность (360°) делится на 4 квадранта (обозначим их I, II, III, IV), каждый из которых равен 90°. Определить, в каком квадранте расположен повернутый контролируемый объект и, соответственно, изображение штриха сигнальной маски на МФПУ, можно с помощью простейшего устройства, приведенного на фиг.7. Диск 20 с тремя прозрачными прорезями (дорожками), изображенный на фиг 8, закреплен на контролируемом объекте 3. На измерительном блоке 2 установлен диск 21 с тремя прорезями (отверстиями), расположенными в плоскости чертежа напротив соответствующих дорожек диска 20. Перед тремя отверстиями в диске 21 расположены три оптронные пары, которые обозначим 22, 23, 24. Нижняя 22, средняя 23, верхняя 24 оптронные пары расположены соответственно перед отверстием 25, нижней дорожкой 27 и верхней дорожкой 26. Из фиг.8 очевиден принцип определения номера квадранта и место нуля. Сигнал с оптронной пары 22 указывает на место нулевого отсчета. Одновременные сигналы с оптронных пар 23, 24 указывают на квадрант I. Квадранту II соответствует сигнал с оптронной пары 23, квадрант III - это отсутствие сигналов с оптронных пар 23, 24, а квадранту IV соответствует сигнал с оптронной пары 24. Рассмотренное устройство, по существу, является простейшим фотоэлектрическим преобразователем «угол-код». Описанные выше приемы конкретизации измеряемого угла поворота не являются единственными и оригинальными.
Таким образом, предлагаемое устройство обеспечивает:
- существенное повышение точности угловых измерений,
- надежную работу прибора при эксплуатации, т.к. устройство приобретает свойство нерасстраиваемости,
- небольшие массогабаритные характеристики,
- расширение области применения датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2024 |
|
RU2829832C1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| Способ измерения углов,образуемых тремя гранями призмы,и устройство для его осуществления | 1985 |
|
SU1250848A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛАЗЕРНОГО ПРИБОРА | 2009 |
|
RU2419079C1 |
| Устройство для контроля центрирования оптических деталей | 1988 |
|
SU1536198A1 |
| СПОСОБ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ОБЪЕМНЫХ ОБЪЕКТОВ ПО ЗАДАННЫМ СВЕТОВЫМ МАРКАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079810C1 |
| Прибор для контроля углов призм | 1977 |
|
SU693109A1 |
| Датчик угла скручивания | 1990 |
|
SU1776989A1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
Изобретение относится к области измерительной техник и может быть использовано в углоизмерительных устройствах. Датчик угла поворота содержит осветитель с маской, измерительный блок, включающий многоплощадочное фотоприемное устройство (МФПУ), оптически сопряженное с маской, и светоделитель, расположенный между объективом и МФПУ. При этом маска установлена перед светоделителем в фокальной плоскости объектива, МФПУ подключено к электронному блоку, а устройство также содержит контролируемый объект, установленный с возможностью поворота относительно измерительного блока. Причем на контролируемом объекте закреплен дополнительный оптический элемент, выполненный в виде двойного зеркала с прямым углом между его зеркалами, обращенного к объективу. Ребро между зеркалами двойного зеркала перпендикулярно оптической оси объектива, а ось поворота контролируемого объекта и плоскость симметрии двойного зеркала параллельны оптической оси объектива. Технический результат - повышение точности измерения угла поворота контролируемого объекта. 8 ил.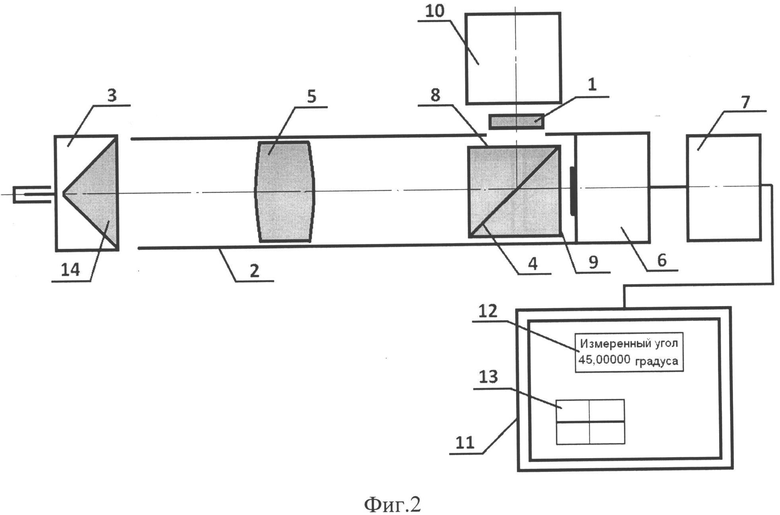
Датчик угла поворота, содержащий осветитель с маской, измерительный блок, включающий многоплощадочное фотоприемное устройство (МФПУ), оптически сопряженное с маской, и светоделитель, расположенный между объективом и МФПУ, при этом маска установлена перед светоделителем в фокальной плоскости объектива, МФПУ подключено к электронному блоку, а устройство также содержит контролируемый объект, установленный с возможностью поворота относительно измерительного блока, отличающийся тем, что на контролируемом объекте закреплен дополнительный оптический элемент, выполненный в виде двойного зеркала с прямым углом между его зеркалами, обращенного к объективу, при этом ребро между зеркалами двойного зеркала перпендикулярно оптической оси объектива, а ось поворота контролируемого объекта и плоскость симметрии двойного зеркала параллельны оптической оси объектива.
| УГЛОИЗМЕРИТЕЛЬНЫЙ ЗВЕЗДНЫЙ ПРИБОР | 2009 |
|
RU2399871C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2011 |
|
RU2470258C1 |
| Датчик углового положения объекта | 1988 |
|
SU1551992A1 |
| US 7110103 B2, 19.09.2006. | |||

