Предлагаемое устройство относится к области измерительной техники и может быть использовано в станкостроении, приборостроении, робототехнике, в частности в различных углоизмерительных устройствах, например, приборах астроориентации.
В настоящее время известны датчики угла поворота (ДУП) (фотоэлектрические цифровые преобразователи угла), использующие кодовые и растровые преобразования (Преснухин Л.Н. и др. «Фотоэлектрические преобразователи информации». Москва, Машиностроение, 1974, стр. 301-304). В устройствах такого типа при уровне погрешностей измерения угла в единицы угловых секунд диаметр их кодовых лимбов может доходить до 300 мм (Королев А.Н., Лукин А.Я., Полищук Г.С. «Новая концепция измерения угла. Модельные и экспериментальные исследования», Оптический журнал, 2012, т. 79, №6, стр. 52-58).
Поэтому уменьшение габаритов таких датчиков при одновременном увеличении их точности является актуальной задачей.
Известно устройство (RU 2419067 С2, G01B 9/00 (2006.01), G01B 11/26 (2006.01), опубл. 20.05.2011, Абсолютный преобразователь угла (варианты)), в котором задача увеличения точности измерения решается путем использования в устройстве двумерных матричных фотоприемных устройств (МФПУ) для решения одномерной задачи измерения плоского угла.
Такой подход позволяет уменьшить размеры измерительного устройства (датчика угла поворота) перпендикулярно оси его вращения и существенно снизить погрешность измерения за счет высокого уровня усреднения большого количества одиночных отсчетов.
К недостаткам вариантов вышеуказанного технического решения следует отнести следующее. При размещении источника излучения (осветителя) во вращающейся части датчика угла поворота имеют место сложности с обеспечением электрическим питанием указанного источника. При размещении осветителя в неподвижной части этого датчика в условиях эксплуатации (например, при изменении температуры) возможна недопустимая расфокусировка изображения на МФПУ, связанная с изменением расстояния между контролируемым объектом (сигнальной маской) и измерительным блоком, приводящую к соответствующему ухудшению точности датчика.
Известно устройство (RU 2569072 С2, G01B 11/26 (2006.01), опубл. 27.03.2015, Датчик угла поворота), в котором задача повышения точности прибора при обеспечении малых габаритов и отсутствии расфокусировки изображения на МФПУ решается за счет того, что в нем помимо МФПУ используется еще призма БР-180° (двойное зеркало, выполненное в виде призмы) посредством которой обеспечивается уменьшение в два раза погрешности измерения плоского угла.
В этом устройстве (ДУП с МФПУ и призмой БР-180°) дополнительно закреплен фотоэлектрический преобразователь угол-код, снабженный кодовым лимбом и оптронными парами (светодиод-фотодиод), что все вместе повышает точность измерения.
Недостатком данного устройства является наличие фотоэлектрического преобразователя угол-код, которое приводит к неоправданному увеличению габаритно-массовых характеристик изделия. Причем создание традиционных фотоэлектрических преобразователей угол-код требует наличие специфических делительных машин и владение достаточно сложной технологией изготовления кодовых лимбов. Использование в фотоэлектрическом преобразователе угол-код нескольких оптронных пар также усложняет юстировку и снижает надежность такого ДУП.
Наиболее близким к предлагаемому изобретению по своей конструкции и составу оптических элементов является техническое решение, описанное в патенте RU 2644994 C1, G01B 11/26 (2006.01), опубл. 15.02.2018, Датчик угла поворота, выбранное в качестве прототипа.
Известный прототип, выполненный в виде фотоэлектрического автоколлиматора, содержит объектив, в фокальной плоскости которого установлено МФПУ, выходом подключенное к электронному блоку, светоделитель, расположенный перед МФПУ, осветитель с источником света, предназначенный для подсветки сигнальной маски с прозрачным штрихом, установленной перед светоделителем в фокальной плоскости объектива, и двойное зеркало, представляющее собой контролируемый объект - призму БР-180°, обращенную прозрачной входной гранью к объективу, причем на входную грань призмы нанесено зеркальное покрытие, выполненное в виде симметрично расположенного круга, осветитель снабжен дополнительным источником света, светоделителем и апертурными диафрагмами, оптически сопряженными с входной гранью призмы посредством конденсора, причем первая диафрагма выполнена в виде круглого прозрачного отверстия, а вторая имеет вид прозрачного кольца, при этом диаметр изображения первой апертурной диафрагмы меньше диаметра круга зеркального покрытия, а внутренний диаметр изображения прозрачного кольца второй диафрагмы больше диаметра круга зеркального покрытия.
Введем следующие обозначения углов поворота: си - угол поворота изображения сигнальной маски с прозрачным штрихом на матрице пикселей двумерного матричного фотоприемного устройства (МФПУ) вокруг оптической оси фотоэлектрического автоколлиматора, αпи - угол поворота призмы БР-180° вокруг оптической оси фотоэлектрического автоколлиматора. При этом известно свойство призмы БР-180°, выражаемое соотношением α1=2αпи.
Недостатком прототипа, с точки зрения точности измерения, является то, что в диапазоне углов поворота призмы БР-180° от 0° до 360° измеренному углу поворота изображения маски α1 может соответствовать два значения угла поворота призмы БР-180° 3 αпи. Поскольку для любого датчика угла поворота с призмой БР-180°, в диапазоне углов поворота указанной призмы от 0° до 360° происходит удвоение угла поворота изображения штриха маски 1 на МФПУ 6 в диапазоне углов поворота указанного изображения от 0° до 720°. То есть, за один оборот призмы БР-180° изображение маски 1 на МФПУ сделает два оборота. А это означает то, что измеренному углу поворота изображения маски α1 может соответствовать два значения угла поворота призмы БР-180° αпи. Например, при включении ДУП призма БР-180° находится в произвольном положении, которому в этом случае соответствуют два значения угла αпи.
Задачей, на решение которой направлено предлагаемое изобретение, является создание малогабаритного ДУП с МФПУ и призмой БР-180°, надежно и однозначно работающего в диапазоне углов от 0° до 360° без использования дополнительного фотоэлектрического преобразователя угол-код.
Данная задача решается за счет того, что в заявленном датчике угла поворота, выполненным в виде фотоэлектрического автоколлиматора, содержащий объектив, в фокальной плоскости которого установлена матрица пикселей МФПУ, выходом подключенный к электронному блоку, светоделитель, расположенный перед МФПУ, маски с прозрачным рисунком, содержащим прозрачную круглую точечную диафрагму и установленной перед светоделителем в фокальной плоскости объектива, двойное зеркало, представляющее собой контролируемый объект - призму БР-180°, обращенную прозрачной входной гранью к объективу, круглый зеркальный отражатель, жестко установленный в центре входной грани, осветитель для подсветки маски с двумя источниками света, светоделителем и апертурными диафрагмами, оптически сопряженными с входной гранью призмы посредством конденсора, причем первая диафрагма выполнена в виде круглого прозрачного отверстия, а вторая имеет вид прозрачного кольца, при этом диаметр изображения первой апертурной диафрагмы меньше диаметра зеркального отражателя, а внутренний диаметр изображения прозрачного кольца второй диафрагмы больше диаметра зеркального отражателя, при этом зеркальный отражатель выполнен в виде клина, зеркальной плоскостью обращенной к объективу, угол клина Ω ≤ arctg(b/4f'), где b - меньший размер матрицы МФПУ, f' - фокусное расстояние объектива, прозрачная круглая точечная диафрагма симметрично расположена в точке пересечения оптической оси объектива с маской, а ребро клина перпендикулярно ребру двойного зеркала призмы БР-180°.
Состав конструктивных элементов, их взаимное расположение, взаимодействие, форма и соотношение образуемых геометрических фигур, а также материал, характеризуют объект - устройство в целом и обуславливают его воспроизводимость, а также обеспечивают достижение технического результата.
Технический результат, обеспечиваемый приведенной совокупностью признаков, выражается в том, что ДУП с МФПИ и призмой БР-180° надежно и однозначно проводит измерения углов в диапазоне углов от 0° до 360°. Это достигается тем, что на призму БР-180° установлен зеркальный отражатель, выполненный в виде зеркального клина, зеркальной плоскостью обращенной к объективу, а прозрачная круглая точечная диафрагма симметрично расположена в точке пересечения оптической оси объектива с маской, при этом ребро клина перпендикулярно ребру двойного зеркала призмы БР-180°.
Состав конструктивных элементов предлагаемого устройства отличается от конструкции прототипа только наличием зеркального клина, размещенного на призме БР-180°. В остальном конструкция оптических схем предлагаемого изобретения и прототипа одинаковы.
Сущность изобретения поясняется чертежами, на которых изображено:
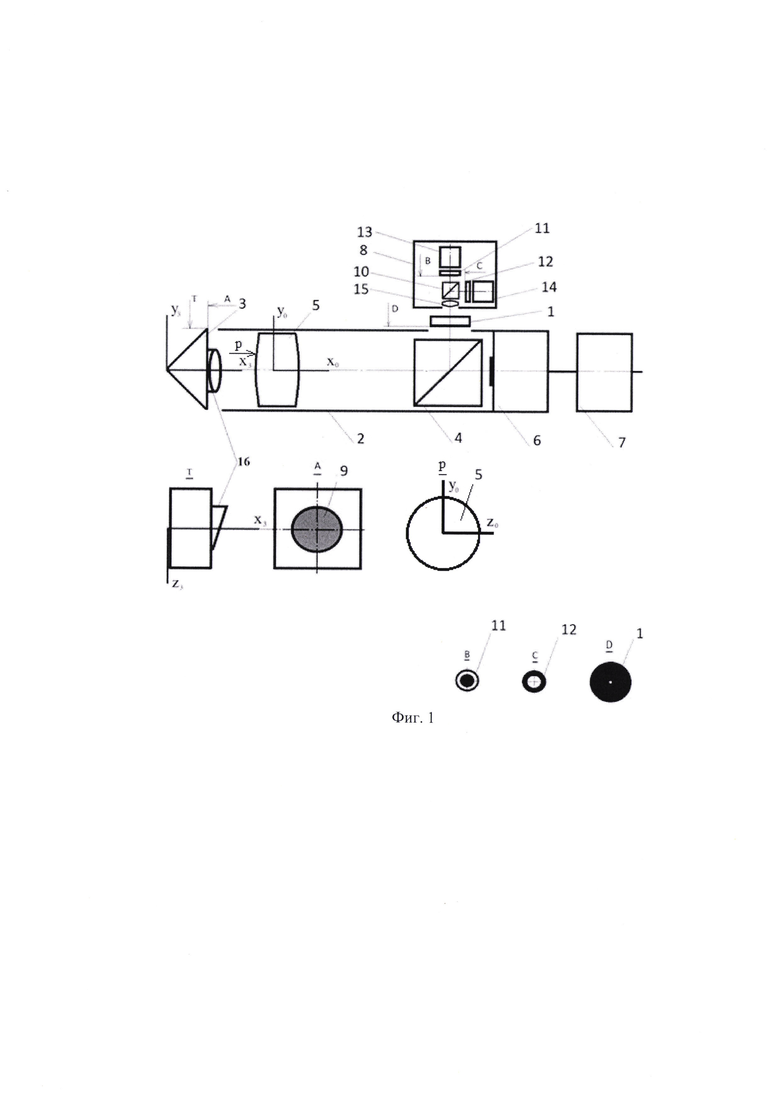
на фиг. 1 - предлагаемое изобретение;
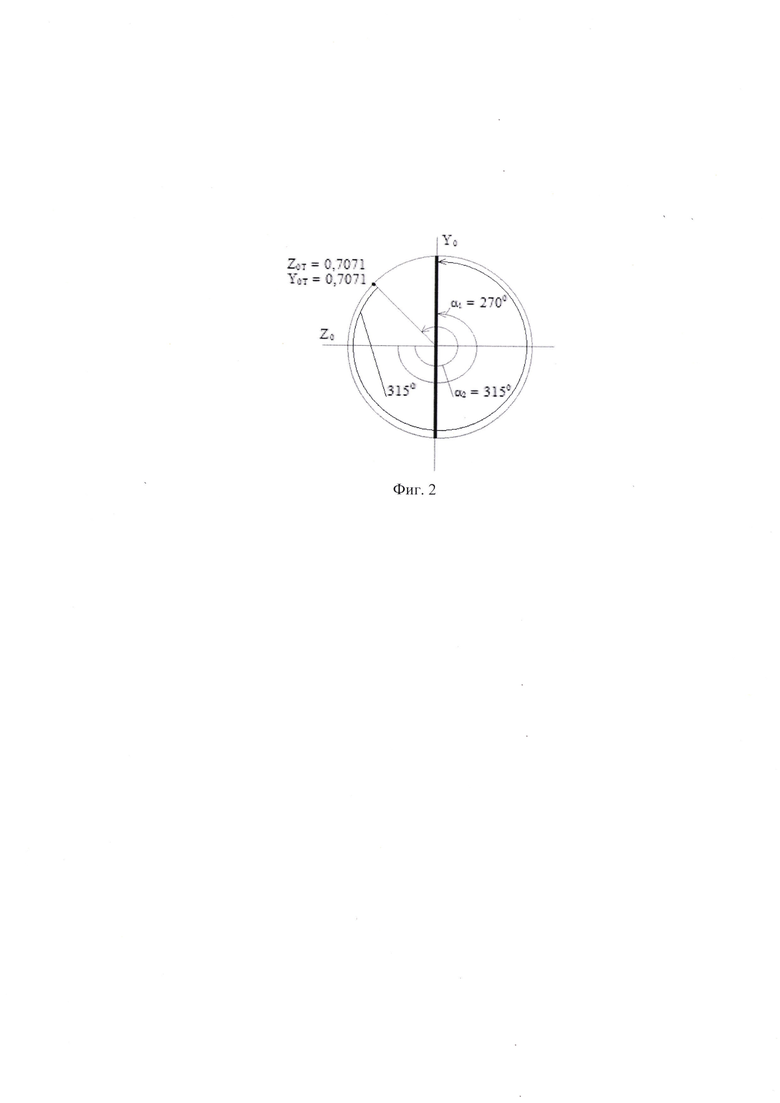
на фиг. 2 - пример изображений маски в системе координат Z0Y0.
Предлагаемое изобретение (датчик угла поворота на фиг. 1) представляет собой двухканальную систему. Канал I (автоколлимационный канал) состоит из следующих элементов: 14, 12, 10, 15, 1, 4, 5, 9, 5, 4, 6, 7. В канал II (угла поворота) входят элементы 13, 11, 10, 15, 1, 4, 5, 3, 5, 4, 6, 7. Предлагаемое изобретение (датчик угла поворота), представленное на фиг. 1, состоит из маски 1, неподвижного измерительного блока 2 и включает контролируемый вращающийся объект 3 выполненного в виде призмы БР-180°. Кроме того, в него входит светоделитель 4, расположенный между объективом 5 и МФПУ 6, а маска 1 установлена перед светоделителем 4 в фокальной плоскости объектива 5. Осветитель 8 освещает маску 1. Матрица МФПУ 6 оптически сопряжена с рисунком маски 1. Поэтому МФПУ совмещено с фокальной плоскостью объектива 5. Маска 1 установлена так, что она перпендикулярна оптической оси датчика и совмещена с центром светоделителя. В состав электронного блока 7, подключенного к МФПУ 6, входит также персональный компьютер с монитором. Маска 1, работающая на проход, представляет собой сетку с прозрачным рисунком на непрозрачном покрытии. В отношении вида рисунка сетки в ДУП с МФПУ необходимо пояснить следующее.
В рассматриваемом ДУП для измерения угла поворота возможно применение различных прозрачных рисунков на маске 1. Прозрачный рисунок маски представляет собой прямолинейный штрих (отрезок) и прозрачную круглую точечную диафрагму. Размер изображения точечной диафрагмы не меньше суммарного размера двух пикселей матрицы МФПУ.
Указанный штрих расположен перпендикулярно плоскости чертежа; исходное (нулевое) положение призмы БР-180°, когда ее ребро горизонтально (перпендикулярно плоскости чертежа), а измеряемый угол - ноль градусов (фиг. 1), при этом контролируемый объект 3 представляет собой оптический элемент, выполненный в виде двойного зеркала с прямым углом между его зеркалами (призму БР-180°), обращенного к объективу 5 измерительного блока 2. Призма БР-180° установлена так, что ребро между ее зеркальными гранями перпендикулярно оптической оси 5 и оси вращения контролируемого объекта. На входную (преломляющую) грань призмы 3 жестко установлен зеркальный клин 16, выполненный в виде симметрично расположенного круга 9, остальная часть входной грани имеет просветляющее покрытие (фиг. 1, вид А). В осветителе 8 размещены дополнительно светоделитель 10 (куб-призма) и две апертурные диафрагмы 11, 12 с соответствующими подсветками 13, 14. Апертурные диафрагмы оптически сопряжены с входной гранью призмы посредством конденсора 15, причем диафрагма 12 выполнена в виде круглого прозрачного отверстия (фиг. 1, вид С), а диафрагма 11 в виде прозрачного кольца (фиг. 1, вид В). При этом диаметр изображения прозрачного отверстия меньше диаметра круглого зеркального слоя 9 на зеркальной грани клина 16, а внутренний диаметр изображения прозрачного кольца больше диаметра круглого зеркального слоя 9 клина 16. Конструкция подсветок 13, 14 представляет собой, например, источники излучения с молочным стеклом. При этом зеркальный отражатель выполненный в виде клина 16, зеркальной плоскостью обращенной к объективу. Угол клина
Ω ≤ arctg(b/4f'), (1)
где b - меньший размер матрицы матричного фотоприемного устройства, f' - фокусное расстояние объектива 5.
Прозрачная круглая точечная диафрагма симметрично расположена в точке пересечения оптической оси объектива с маской (фиг. 1, вид D). Прямолинейный штрих на виде D не показан. Ребро клина перпендикулярно ребру двойного зеркала призмы БР-180°.
На фиг. 1 введены две системы координат (СК) X0Y0Z0 и X3Y3Z3. СК X0Y0Z0 - СК автоколлиматора (измерительного блока) 2, ось Хо которой совмещена с визирной линией датчика угла поворота, а ориентация осей Y0, Z0 задается ортогональной структурой матрицы МФПУ. Строки матрицы параллельны оси Z0, а столбцы - Y0. Прозрачный штрих сетки параллелен оси Z0. Система координат X3Y3Z3 - СК призмы БР-180° (представляет ее конечное угловое пространственное положение), ось Х3 которой перпендикулярна ребру призмы 3, совпадает с нормалью к ее преломляющей плоскости, визирной линией датчика и осью вращения призмы 3. Ребро БР-180° является осью Z3. В исходном положении оси СК X0Y0Z0 и X3Y3Z3 параллельны и одинаково направлены.
Предлагаемое устройство работает следующим образом.
Датчик угла поворота (фиг. 1) работает следующим образом. Каналы I, II работают попеременно. При работе автоколлимационного канала (канала I) свет (лучи) от подсветки 14, пройдя апертурную диафрагму 12, отразившись от светоделителя 10, пройдя конденсор 15, освещает маску 1 с рисунком, содержащим, в том числе, прозрачную круглую точечную диафрагму, расположенную в точке пересечения оптической оси объектива 5 с маской 1. Затем указанный свет (лучи), пройдя прозрачный рисунок маски 1, отразившись от светоделителя 4 и выйдя из объектива 5 в виде параллельного пучка лучей, освещает круглый зеркальный слой 9 зеркального клина 16 на входной грани призмы 3. При этом ни один луч не попадает на прозрачную часть входной грани призмы БР-180° 3. Затем параллельные лучи, отразившись от зеркала 9, фокусируются объективом 5 и, пройдя куб-призму 4, строят на матрице пикселей МФПУ изображение рисунка маски 1, содержащим, в том числе, точечное изображение прозрачной круглой точечной диафрагмы. Благодаря зеркальному клину 16 с углом Ω при вершине, значения параметров которого определяются по выражению (1), и тому, что ребро клина перпендикулярно ребру двойного зеркала призмы БР-180°, изображение прозрачной круглой точечной диафрагмы на МФПУ будет всегда смещено с оптической оси объектива 5 в направлении вдоль ребра призмы 3, но при этом не выйдет за границы матрицы пикселей. Указанное смещение будет вдоль положительного направления оси Z3. В исходном положении ДУП, когда оси СК X0Y0Z0 и X3Y3Z3 параллельны и одинаково направлены, это смещение точечного изображения на МФПУ будет вдоль положительного направления оси Z0 (начало отсчета). При вращении призмы 3 совместно с клином 16 (СК X3Y3Z3) вокруг оси Х0(Х3) точечное изображение будет перемещаться по окружности с постоянным радиусом R= f'tg(2Ω). При этом при повороте призмы на угол αп измеренный угол поворота точечного изображения повернется на угол α2=αп, то есть никакого удвоения угла поворота точечного изображения не происходит. Далее посредством электронного блока 7 по измеренным данным определяются координаты центроида изображения точечной диафрагмы 1 Yот, Zот (Yот, Zот см. например, на фиг. 2) на плоскости пикселей МФПУ 6 в системе координат ZoYo по известным формулам определения центра тяжести изображения (Федосеев В.И., Колосов М.П. Оптико-электронные приборы ориентации и навигации космических аппаратов. - Москва: Логос, 2007, 248 с.). Угол α2 можно определять, используя различные тригонометрические выражения. Для определения угла α2 в СК YoZo целесообразно использовать следующие выражения.
При отрицательном значении Yот (0°≥Yот):
α2=arccos(Zот/R). (2)
При положительном значении Yот (0°<Yот):
α2=360°–arccos(Zот/R). (3)
Эти формулы можно использовать как основу для разработки алгоритма вычисления угла α2. Как отмечено выше при работе автоколлимационного канала (канала I) происходит определение координаты центроида изображения точечной диафрагмы (Yот, Zот) на плоскости пикселей МФПУ 6 в СК Yот, Zот. Поэтому для конкретного углового положения призмы БР-180° 3 знак измеренной величины Y0T известен. А это однозначно определяет выбор формулы (2 или 3) для вычисления искомого значения α2. Работа канала I заканчивается выдачей посредством электронного блока 6 полученной величины угла α2, значение которого соответствует угловому положению призмы 3.
После чего начинает работать канал угла поворота (канал II). При работе этого канала происходит определение угла он поворота изображения рисунка маски 1 на матрице МФПУ 6 в СК Yот, Zот. Например, вычисление угла поворота изображения прозрачного штриха на маске 1. С помощью электронного блока 7 производится определение координаты, энергетического центра каждой части изображения штриха в каждой строке матрицы пикселей МФПУ 6. Таким образом, количество измерений равно количеству строк матрицы МФПУ (или при большем угле - количеству ее столбцов). Далее по алгоритму, представленному в патенте РФ RU 2419067 С2 (RU 2419067 С2, G01B 9/00 (2006.01), G01B 11/26 (2006.01), опубл. 20.05.2011. Абсолютный преобразователь угла (варианты)) в электронном блоке 7 производится определение угла поворота изображения штриха на МФПУ 6 - α1. Благодаря использованию указанного алгоритма канал угла поворота (канал II) обладает высокой точностью измерений.
Спецификой оптических свойств призмы БР-180° является то, что при повороте призмы 3 на угол ап в диапазоне углов от 0° до 360° угол α1 поворота изображения маски 1 на матрице МФПУ происходит в диапазоне углов от 0° до 720°, внутри которого формально могут быть два значения углов α1. Следует отметить, что при работе ДУП угловое положение призмы 3 может быть неизвестно. Поэтому для определения измеренного угла αпи поворота призмы по углу проводятся следующие действия. Для данного угла поворота призмы 3 и по измеренному углу си формально вычисляются два значения угла αпи по следующим формулам:
αпи=α1/2. (4)
αпи=(α1+360°)/2. (5)
Разность значений углов по формулам (4, 5) равна 180°. Из двух значений, вычисленных по формулам (4, 5), выбирается то, которое соответствует равенству α2=αпи. Это значение αпи и является искомым результатом измерений канала II и всего ДУП в целом.
Следует особо отметить, что автоколлимационный канал I (измерение α2) является вспомогательным каналом, имеющим более низкую точность по сравнению с высокоточным каналом угла поворота II (измерение αпи). Поэтому при одном угловом положении призмы БР-180° измеренные ДУП значения α2 и αпи будут несколько отличаться друг от друга с учетом погрешностей измерений каналов I и II.
Рассмотрим конкретный пример работы предлагаемого изобретения.
Для простоты примем, что R=f'tg(2Ω)=1. Пусть в результате измерений в канале I получены координаты центроида изображения точечной диафрагмы маски 1 на плоскости пикселей МФПИ 6 в СК Yот, Zот следующие значения: Yот=0,7071, Zот=0,7071 (см. фиг. 2). Так как значение Yот (0°<Yот) положительно, то воспользуемся формулой (3):
α2=360°–arccos(0,7071)=315°.
Так как α2=αп, то и призма 3 повернута относительно оси Zo на угол ~315°.
В результате работы канала II определяется угол он поворота изображения прозрачного штриха на плоскости пикселей МФПИ 6 в СК Yот, Zот. В случае рассматриваемого примера с учетом удвоения угла поворота изображения штриха на МФПУ 6 его положение в СК Yот, Zот можно определить как 315°×2=630°. Чисто графически (315°+315°, фиг. 2). В результате изображение прозрачного штриха будет параллельно оси Yo, а искомый угол α1=270° (фиг. 2). 630°–360°=270°. Углы α2 и α1 отсчитываются от оси Zo в положительном направлении (против часовой стрелки).
Затем по полученному углу α1 формально вычисляются два значения угла αпи по формулам (4, 5):
αпи=270°/2=135°;
αпи=(270°+360°)/2=315°.
Так как 135°≠315°(α2), то поэтому из двух значений, вычисленных по формулам (4, 5), выбирается αпи=315°, которое соответствует равенству α2=αпи. Это значение αпи=315° и является результатом измерений высокоточного канала II и всего ДУП в целом.
Таким образом, предлагаемое устройство обеспечивает:
- решение задачи по создание ДУП с МФПУ и призмой БР-180°, надежно и однозначно работающего в диапазоне углов 0°-360° без использования дополнительного фотоэлектрического преобразователя угол-код;
- новые функциональные возможности и небольшие массогабаритные характеристики за счет исключения использования дополнительного фотоэлектрического преобразователя угол-код;
- надежную работу прибора при эксплуатации и расширение области применения датчика угла поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2013 |
|
RU2569072C2 |
| Фотоэлектрическое устройство для измерения углов поворота | 1979 |
|
SU1032331A1 |
| Фотоэлектрическое устройство дляизМЕРЕНия углОВ пОВОРОТА | 1979 |
|
SU798483A1 |
| Углоизмерительный прибор | 2018 |
|
RU2682842C1 |
| Углоизмерительный прибор | 2019 |
|
RU2713991C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| ОПТИЧЕСКИЙ СОЛНЕЧНЫЙ ДАТЧИК | 2013 |
|
RU2517979C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2013 |
|
RU2554599C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ЗВЕЗДНЫЙ ПРИБОР | 2009 |
|
RU2399871C1 |
Изобретение относится к датчикам угла поворота. Сущность: датчик выполнен в виде фотоэлектрического автоколлиматора и содержит объектив (5), в фокальной плоскости которого установлена матрица пикселей матричного фотоприемного устройства (6), выходом подключенного к электронному блоку (7). Перед матричным фотоприемным устройством (6) расположен светоделитель (4). Маска (1) с прозрачным рисунком, содержащим прозрачную круглую точечную диафрагму, установлена перед светоделителем (4) в фокальной плоскости объектива (5). Также датчик содержит двойное зеркало, представляющее собой контролируемый объект (3) - призму БР-180°, обращенную прозрачной входной гранью к объективу, и круглый зеркальный отражатель (16), жестко установленный в центре входной грани. Зеркальный отражатель (16) выполнен в виде клина, зеркальной плоскостью обращенной к объективу (5), угол клина Ω ≤ arctg(b/4f'), где b - меньший размер матрицы матричного фотоприемного устройства, f' - фокусное расстояние объектива. Прозрачная круглая точечная диафрагма симметрично расположена в точке пересечения оптической оси объектива (5) с маской (1), а ребро клина - перпендикулярно ребру двойного зеркала призмы БР-180°. Для подсветки маски (1) в датчике предусмотрен осветитель (8) с двумя подсветками (13, 14), светоделителем (10) и апертурными диафрагмами (11, 12), оптически сопряженными с входной гранью призмы посредством конденсора (15). Первая диафрагма (12) выполнена в виде круглого прозрачного отверстия, а вторая диафрагма (11) имеет вид прозрачного кольца. При этом диаметр изображения первой диафрагмы (12) меньше диаметра зеркального отражателя (16), а внутренний диаметр изображения прозрачного кольца второй диафрагмы (11) больше диаметра зеркального отражателя (16). Технический результат: точное измерение углов в диапазоне от 0° до 360°. 2 ил.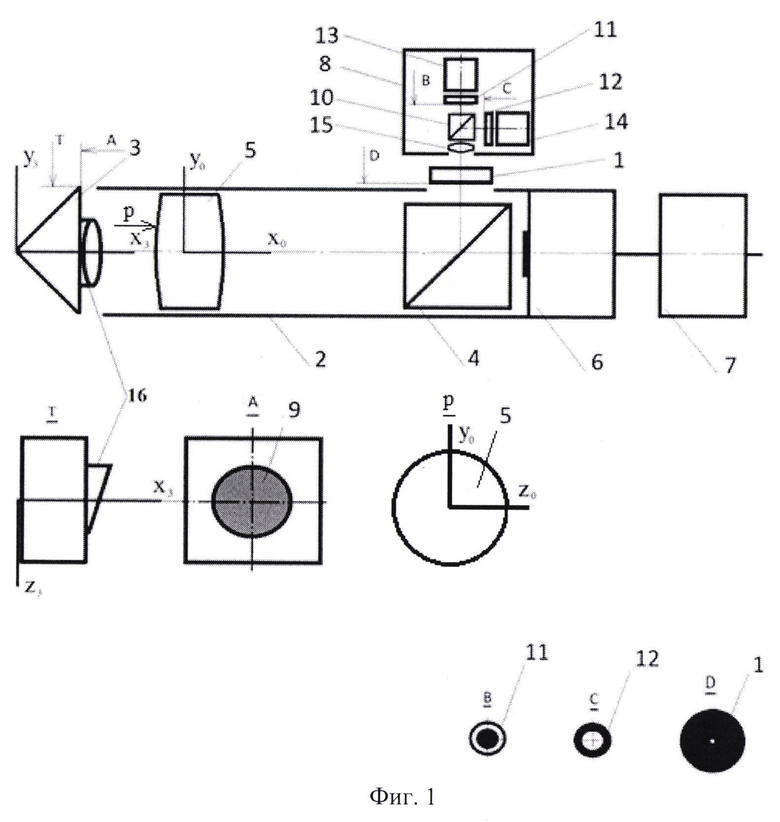
Датчик угла поворота, выполненный в виде фотоэлектрического автоколлиматора, содержащий объектив, в фокальной плоскости которого установлена матрица пикселей матричного фотоприемного устройства, выходом подключенного к электронному блоку, светоделитель, расположенный перед матричным фотоприемным устройством, маску с прозрачным рисунком, содержащим прозрачную круглую точечную диафрагму, и установленную перед светоделителем в фокальной плоскости объектива, двойное зеркало, представляющее собой контролируемый объект - призму БР-180°, обращенную прозрачной входной гранью к объективу, круглый зеркальный отражатель, жестко установленный в центре входной грани, осветитель для подсветки маски с двумя источниками света, светоделителем и апертурными диафрагмами, оптически сопряженными с входной гранью призмы посредством конденсора, причем первая диафрагма выполнена в виде круглого прозрачного отверстия, а вторая имеет вид прозрачного кольца, при этом диаметр изображения первой апертурной диафрагмы меньше диаметра зеркального отражателя, а внутренний диаметр изображения прозрачного кольца второй диафрагмы больше диаметра зеркального отражателя, отличающийся тем, что зеркальный отражатель выполнен в виде клина, зеркальной плоскостью обращенной к объективу, угол клина Ω ≤ arctg(b/4f'), где b - меньший размер матрицы матричного фотоприемного устройства, f' - фокусное расстояние объектива, прозрачная круглая точечная диафрагма симметрично расположена в точке пересечения оптической оси объектива с маской, а ребро клина перпендикулярно ребру двойного зеркала призмы БР-180°.
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2013 |
|
RU2569072C2 |
| АБСОЛЮТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА (ВАРИАНТЫ) | 2009 |
|
RU2419067C2 |

